Регулятор оборотов электродвигателя без потери мощности: Регулятор оборотов электродвигателя без потери мощности
Регулятор оборотов электродвигателя без потери мощности
Плата регулировки оборотов коллекторных электродвигателей на микросхеме TDA1085, позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется «Плата регулировки оборотов коллекторных двигателей без потери мощности».
И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется «Плата регулировки оборотов коллекторных двигателей без потери мощности».
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос — Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата «Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085».
Краш-тест платы регулировки оборотов
3960 р.
Мосгриндер регулятор оборотов коллекторного двигателя (без потери мощности)
Данный регулятор снят с производства
Взамен него выпущен IРD-VR в корпусе IP54
Существует 2 способа регулировки частоты коллекторного двигателя. Первый простой способ —регулировка по напряжению. Второй способ управления двигателем — импульсный под управлением микропроцессора. Первый способ прост и дешев, но пропорционально падению оборотов двигателя падает и крутящий момент. Инструмент теряет работоспособность на малых оборотах. Второй способ регулировки дороже и сложнее, но главное, он требует установки на вал двигателя таходатчика. Поставить таходатчик на уже готовый инструмент невозможно.
Первый простой способ —регулировка по напряжению. Второй способ управления двигателем — импульсный под управлением микропроцессора. Первый способ прост и дешев, но пропорционально падению оборотов двигателя падает и крутящий момент. Инструмент теряет работоспособность на малых оборотах. Второй способ регулировки дороже и сложнее, но главное, он требует установки на вал двигателя таходатчика. Поставить таходатчик на уже готовый инструмент невозможно.
Мы нашли решение данной проблемы. Строго говоря, наш новый регулятор оборотов коллективного (щеточного) двигателя сохраняет крутящий момент а не мощность. Не теряется усилие на круге при работе. Точнее почти не теряется. Регулятор дает ~70-80% от максимального усилия при нулевом положении регулятора. Сохранение 100% крутящего момента не достижимо без использования обратной связи через таходатчик. В нашей схеме процессор регулятора оборотов получает данные о текущей частоте работы щеточного двигателя по косвенным признакам. Из за этой погрешности в определении частоты и теряется 20-30% усилия.
Технические характеристики:
Габаритные размеры: Д=85, Ш=85, В=70 мм (шнур 1,4 м)
Масса: 200 гр.
Диапазон допустимых мощностей регулировки: 800-1100 Вт
Подключение 220 В
Тип регулировки: микропроцессорная
Пылезащитное исполнений
Мосгриндер
Доставка:до терминала ТК
Страна — владелец бренда:Россия
Страна производства:Россия
Размер габаритный, мм:60х70х80
Регулятор оборотов коллекторного двигателя с обратной связью
Плата регулятор оборотов без потери мощности для двигателей от стиральных машин, controller TDA1085
Полностью собранная настроенная и проверенная плата регулировки оборотов двигателей от стиральных машин без потери мощности для двигателей мощностью до 1000 Вт. Плата собрана на оригинальном контроллере TDA1085C? а не его дешевых аналогах/ Установлен мощный симистор с током до 40 А что обеспечивает большой запас устройства по мощности. Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и других. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах от 0 до15000 оборотов вминуту. Скорость вращения двигателя отслеживается тахогенератором.
Видео обзор платы регулятора оборотов с обратной связью:
Плата обеспечивает поддержку оборотов без потери мощности даже на минимальных оборотах двигателя!
Так как двигатели от стиральных машин обладают высокой надежностью, и достаточно доступны по цене,при этом у многих просто лежат дома без дела от сломанной стиральной машины, то их широко применяют для изготовления различных станков и приспособлений: точильных станков, токарных и даже фрезерных станков, сверлильных станков, медогонок, гончарных кругов, и другого оборудования.
Плата не только регулирует обороты, но и надежно поддерживает их при появлении нагрузки на валу!
На плате установлены подстроечные резисторы для настройки:
— Максимальных оборотов
— Скорости набора оборотов при вращении потенциометра
— Скорости реакции платы на появление нагрузки на валу
— Подстройки и синхронизации работы таходатчика
Комплектация платы регулятора оборотов:
1. Спаянная, настроенная и проверенная плата регулятора оборотов.
2. Переменный резистор с пластиковой ручкой.
3. Клавишный переключатель включения контроллера.
4. Клавишный переключатель направления вращения (Для реверса).
5. Светодиод индикации.
6. Запасной предохранитель.
7. Краткое описание.
Есть в наличии комплект платы регулятора оборотов со всеми необходимыми проводами. Помимо самой платы в комплект входит:
- Сетевой шнур для подключения питания длинной 1 метр.
- Провод для подключения таходатчика длинной 1 метр
- Провода для подключения двигателя с распаянным тумблером реверса.
 От тумблера до двигателя 1 метр
От тумблера до двигателя 1 метр - Светодиод с проводом 20 см.
- Тумблер включения с проводом 20 см.
- Резистор регулятора оборотов с с проводами 20 см.
- Запасной предохранитель и краткое описание прилагаются
 От тумблера до двигателя 1 метр
От тумблера до двигателя 1 метрСтоимость платы регулятора оборотов с комплектом проводов составит 800 грн. Если вам необходим такой комплект, то обязательно сообщите об этом по телефону и напишите в комментарии к заказу.
Техника безопасности при работе с регулятором
Для того чтобы избежать поражения электрическим током при обращении с регулятором оборотов, соблюдайте основные меры безопасности:
— Никогда не прикасайтесь к подключенной к сети 220v плате руками.
— С осторожностью проводите настройку платы, при необходимости делайте это при помощи отвертки с прорезиненной ручкой.
— Будьте аккуратны с переменным резистором, на нем тоже присутствует напряжение в местах подключения к клемм и в местах соединения с проводами.
/F108M_(10-90V-60A)-03.JPG)
— Настоятельно рекомендую сначала подключить двигатель и сетевой провод к плате, а затем уже подключать к сети 220V. — Желательно плату поместить в корпус, предусмотрев отверстия
для вентиляции. Если корпус металлический обязательно его заземляем, вместе с двигателем.
— Не допускайте перегрева симистора, отслеживайте температуру путем на радиаторе. Температура не должна превышать 80°С. Не прикасайтесь к радиатору до отключения регулятора от сети.
Ознакомится со схемой подключения данной платы к двигателю, а так же особенности подключения датчика Холла вы можете в статье перейдя по ссылке
Схема коммутации реверса двигателя:
Видео обзор подключения реверса к плате регулятора оборотов
 youtube.com/embed/miN9ZogFXDU?rel=0&loop=0&autoplay=0&controls=1&showinfo=1&disablekb=0&modestbranding=0″/>
youtube.com/embed/miN9ZogFXDU?rel=0&loop=0&autoplay=0&controls=1&showinfo=1&disablekb=0&modestbranding=0″/>
Блок управления, регулятор оборотов на TDA1085 для электродвигателя
Описание устройства
Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и другие. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах 0 — 15000 оборотов в минуту. Устройство собрано на базе микросхемы TDA 1085C.
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Установлен мощный симистор с током до 40А что обеспечивает большой запас по мощности регулятора.Плата полностью собрана настроена и проверена. При изготовлении применен стеклотекстолит фольгированный двухсторонний FR-4 с номинальной толщиной 1,6 мм, облицованный медной фольгой толщиной 70 мкм с двух сторон.
Устройство не только регулирует обороты, но и надежно поддерживает их при появлении нагрузки на валу!
На плате установлены подстроечные резисторы для настройки:
— Максимальных оборотов
— Скорости набора оборотов при вращении потенциометра
— Скорости реакции платы на появление нагрузки на валу
— Подстройки и синхронизации работы таходатчика
В комплектацию платы регулятора оборотов входит:
1. Спаянная, настроенная и проверенная плата регулятора оборотов.
2. Переменный резистор с пластиковой ручкой.
3. Клавишный переключатель включения контроллера.
4. Клавишный переключатель направления вращения (Для реверса).
5. Светодиод индикации.
6. Запасной предохранитель.
7. Краткое описание.
Есть в наличии комплект платы регулятора оборотов со всеми необходимыми проводами. Помимо самой платы в комплект входит:
Помимо самой платы в комплект входит:
- Сетевой шнур для подключения питания длинной 1 метр.
- Провод для подключения таходатчика длинной 1 метр
- Провода для подключения двигателя с распаянным тумблером реверса. От тумблера до двигателя 1 метр
- Светодиод с проводом 20 см.
- Тумблер включения с проводом 20 см.
- Резистор регулятора оборотов с с проводами 20 см.
- Запасной предохранитель и краткое описание прилагаются
Стоимость платы регулятора оборотов с комплектом проводов составит 800 грн. Если вам необходим такой комплект, то обязательно сообщите об этом по телефону и напишите в комментарии к заказу.
Видео обзор платы регулятора оборотов с обратной связью:
Подключение реверса для платы регулятора оборотов для двигателей от стиральных машин на TDA1085
 youtube.com/embed/miN9ZogFXDU»/>
youtube.com/embed/miN9ZogFXDU»/>
Для того чтобы избежать поражения электрическим током соблюдайте основные меры безопасности:
— Никогда не прикасайтесь к подключенной к сети 220v плате руками.
— С осторожностью проводите настройку платы, при необходимости делайте это при помощи отвертки с прорезиненной ручкой.
— Будьте аккуратны с переменным резистором, на нем тоже присутствует напряжение в местах подключения к клемм и в местах соединения с проводами.
— Настоятельно рекомендую сначала подключить двигатель и сетевой провод к плате, а затем уже подключать к сети 220V. — Желательно плату поместить в корпус, предусмотрев отверстия для вентиляции. Если корпус металлический обязательно его заземляем, вместе с двигателем.
— Не допускайте перегрева симистора, отслеживайте температуру на радиаторе. Температура не должна превышать 80С. Не прикасайтесь к радиатору до отключения регулятора от сети.
— Помните, что в случае выхода симистора из строя, двигатель может выйди на максимальные обороты, поэтому установите кнопку аварийного отключения питания.
Внимание!!! Провода обозначенные на схеме синим цветом подключаются только в том случае если ваш двигатель с датчиком Холла! Если ваш двигатель с таходатчиком, то их подключать не нужно! Схема не заработает. Это стало распространенной ошибкой среди покупателей.
Ознакомится с особенности подключения датчика Холла вы можете в статье перейдя по ссылке
Схема коммутации реверса коллекторного двигателя:
Регулятор оборотов коллекторного двигателя без потери мощности TDA1085
3 306
Данный модуль позволяет управлять оборотами от 0 до 20000 об/мин. (или максимально заявленных производителем), при этом сохраняя мощность электродвигателя. На плате предусмотрен предохранитель по питанию и все необходимые клеммы для подключения сети 220В, мотора и таходатчика. Регулятор нашел широкое применение для двигателей от стиральных машин автомат.
(или максимально заявленных производителем), при этом сохраняя мощность электродвигателя. На плате предусмотрен предохранитель по питанию и все необходимые клеммы для подключения сети 220В, мотора и таходатчика. Регулятор нашел широкое применение для двигателей от стиральных машин автомат.
Подробнее:
Модуль представляет собой небольшую плату со всеми необходимыми элементами для обвязки и построенную на микросхеме TDA1085c.
Необходимым условием для подключения является наличие таходатчика (тахогенератор), который позволяет обеспечить обратную связь электродвигателя с микросхемой.
При нагрузке двигателя, частота оборотов начинает падать, что фиксирует таходатчик, который дает команду микросхеме увеличить напряжение и наоборот, когда нагрузка ослабевает — напряжение на двигатель падает. Таким образом данная конструкция позволяет поддерживать постоянную мощность коллекторного двигателя при изменении частоты вращения ротора.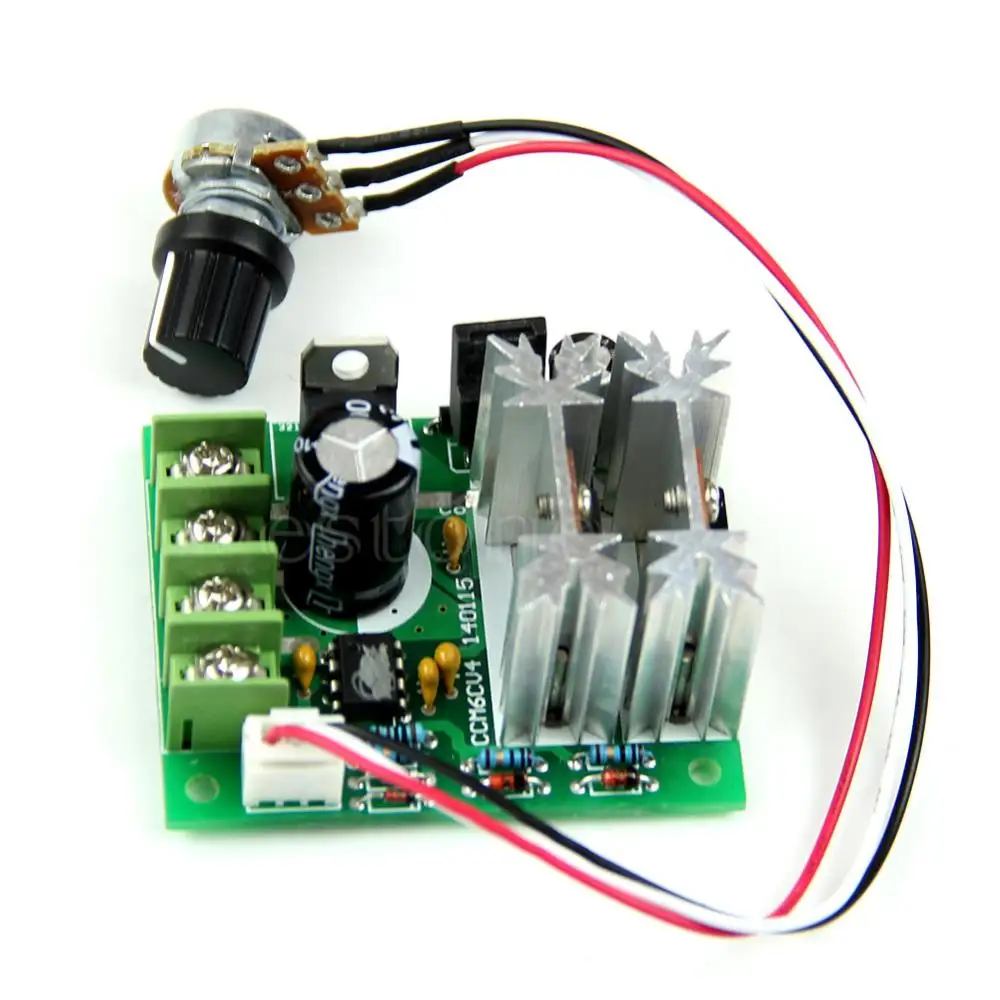
Модуль хорошо подходит к электродвигателю от стиральной машины автомат. В сочетании двух устройств, легко можно сделать своими руками: Токарный станок по дереву, Фрезерный станок, Медогонку, Газонокосилку, Гончарный круг, Дровокол, Наждак, Сверлильный станок, Корморезка и другие устройства где необходимо вращение миханизмов.
Подключение платы к двигателю:
Для подключения коллекторного двигателя к плате управления необходимо разобраться в распиновке проводов. Стандартный коллекторный двигатель имеет 3 группы контактов: таходатчик, щетки и обмотка статора. Редко, но может присутствовать и 4 группа контактов термозащиты (провода обычно белого цвета).
Таходатчик: расположен с задней части двигателя с выходящими проводами (меньше по сечению чем остальные). Провода могут прозваниватся мультиметром и могут иметь небольшое сопротивление.
Щетки: провода прозваниваются друг с другом и коллектором двигателя.
Обмотка: провода имеют 2 или 3 вывода (со средней точкой). Провода прозваниваются друг с другом.
Провода прозваниваются друг с другом.
Подключение коллекторного двигателя к сети 220 Вольт:
Один конец проводов щетки и обмотки соединяем накоротко (или ставим перемычку в контактную колодку), другой конец проводов подключаем к сети 220В. Направление вращения двигателя будет зависить какой из проводов обмотки будет подключен к сети 220В. Если необходимо изменить направление движения двигателя — поставьте перемычку на другую пару проводов «обмотка-щетка».
Подключение коллекторного двигателя к плате регулятора оборотов.
Проводами которыми подключался двигатель к сети 220В подключаем к клемме «М». К клемме «Тaho» подключаем таходатчик. К клемме «L N» подключаем сетевое питание 220 Вольт. Полярность не имеет значения.
В комплекте идет выключатель (клемма SA). Если выключатель не нужен — поставьте перемычку.
Настройка:
На плате предусмотрено 3 типа настройки:
- настройка плавности набора оборотов;
- настройка таходатчика;
- настройка диапазона регулировки оборотов.

Для надежности в работе и правильности настройки рекомендуется выполнять настройку в следующей последовательности:
1) Настройка плавности набора оборотов выполняется подстроечным резистором R1, который отвечает за плавность набора оборотов коллекторного двигателя.
2) Настройка таходатчика выполняется подстроечным резистором R3, что позволяет убрать рывки и дерганье в работе двигателя при регулировке скорости вращения.
3) Настройка диапазона регулировки оборотов выполняется переменным резистором R2. Настройка позволяет ограничить или увеличить минимальное число оборотов коллекторного двигателя, даже при минимально выкрученном потенциометре.
Подключение реверса:
Для подключения реверсного переключателя необходимо убрать перемычку в двигателе (обмотка и щетки). Провода в переключателе разделены тремя парами проводов, одна из которых имеет залуженные концы. Пара с залуженными концами подключается к клемме M. Две оставшиеся пары подключаются к обмотке и щеткам. Какая пара будет подключена к обмотке или щеткам не имеет значения. Полярность подключения не имеет значения.
Какая пара будет подключена к обмотке или щеткам не имеет значения. Полярность подключения не имеет значения.
Пара проводов для подключения к таходатчику двигателя имеет зеленый или черный цвет.
Тех.характеристики платы:
Здесь можно скачать печатную плату в формате LAY, но не много иного вида: СКАЧАТЬ.
Схема и расположение деталей на ней:
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться.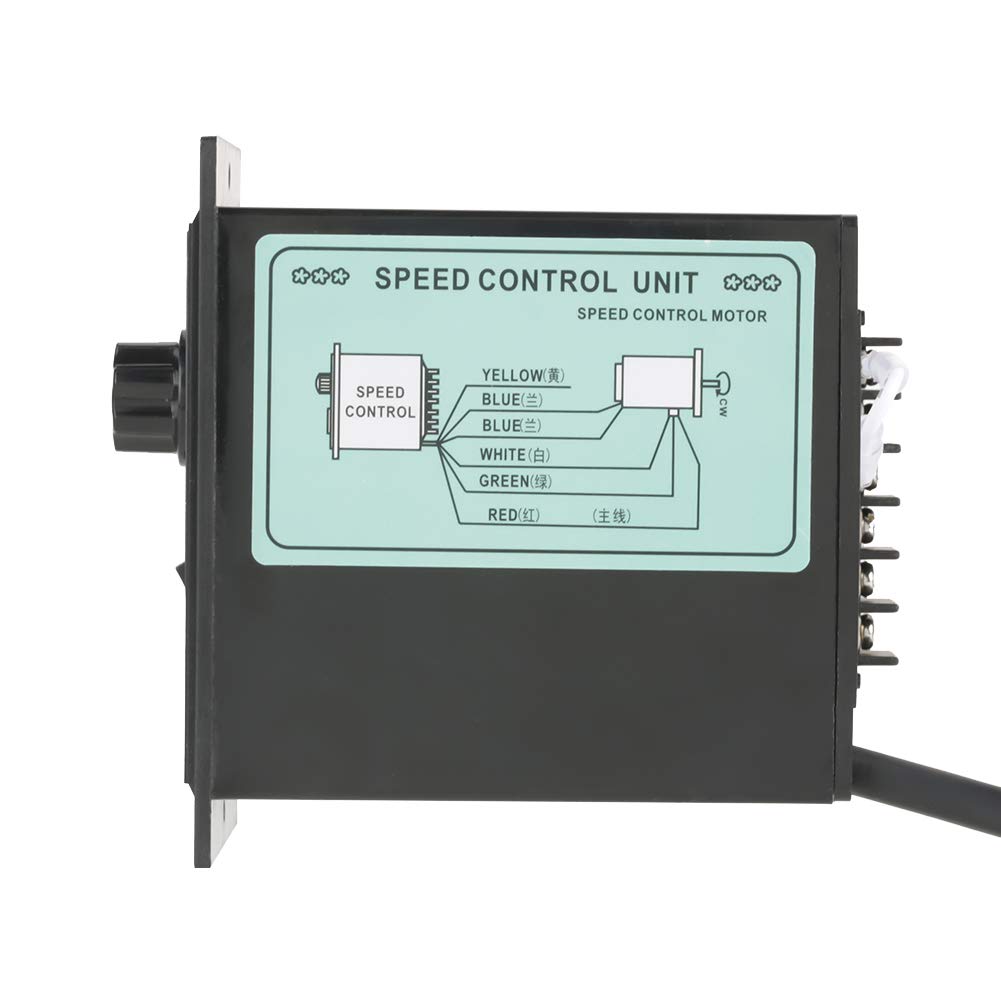 На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные. Дополняются схемами с параллельной и последовательной искусственной коммутацией.
- С запираемыми тиристорами. Схема работы мало отличима от транзисторных.
- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.
Так же по теме ШИМ регулирования предлагаем статью «Регулирование скорости вращения коллекторного двигателя постоянного тока»
Регулировка оборотов двигателя от стиральной машины
Регулировка оборотов двигателя стиральной машины может потребоваться любому домашнему самоделкину, который решит приспособить деталь отслужившей помощницы.
Простое подключение двигателя стиральной машины к питанию не дает много проку, поскольку он выдает сразу максимальные обороты, а ведь многие самодельные приборы требуют увеличения или уменьшения оборотов, причем желательно без потери мощности. В этой публикации мы и поговорим о том, как подключить двигатель от стиралки, и как сделать для него регулятор оборотов.
Сначала подключим
Прежде чем регулировать обороты двигателя стиральной машины, его нужно правильно подключить. Коллекторные двигатели от стиральных машин автомат имеют несколько выходов и многие начинающие самоделкины путают их, не могут понять, как осуществить подключение. Расскажем обо всем по порядку, а заодно и проверим работу электродвигателя, ведь существует же вероятность, что он вовсе неисправен.
- Для начала нужно взять двигатель от стиральной машины, покрутить его и найти катушки возбуждения или башмаки, от которых должно идти 2, 3 и более проводов. Башмаки выглядят примерно так, как показано на рисунке ниже.
- Берем омметр, выставляем тумблер на минимальное сопротивление и начинаем поочередно звонить все выходы. Наша задача выбрать из всех выходов катушки возбуждения 2, у которых значение сопротивления больше всех, если их всего два, то ничего выбирать не нужно.
- Далее нужно найти коллектор двигателя и щетки, от которых также будут идти 2 провода. В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.
- Следующая группа выходов, которые нам позарез нужно обнаружить – это выходы таходатчика. В ряде случаев провода, идущие от таходатчика, можно заметить прямо на корпусе двигателя, но иногда их прячут в недра корпуса и тогда, чтобы подключиться, приходится частично разбирать двигатель.
К сведению! Таходатчики, имеющие два выхода, легко прозваниваются омметром. А вот аналогичные детали с тремя выходами не звонятся ни по одному направлению.
- Далее берем один провод, идущий от коллектора, и соединяем с одним из проводов катушки.
- Второй провод коллектора и второй провод катушки подключаем к сети 220 В.
- Если нам нужно поменять направление вращения якоря, то мы просто меняем местами подключаемые провода, а именно первый провод коллектора и первый провод катушки включаем в сеть, а вторые провода соединяем между собой.
- Отмечаем ярлычками провода катушки, таходатчика и коллектора, чтобы не перепутать и производим пробный пуск двигателя.
Если пробный запуск прошел успешно, а именно, двигатель плавно набрал обороты без заеданий и рывков, щетки не искрили, можно приступать к подключению двигателя стиральной машины через регулятор оборотов. Существует множество схем подключения двигателя через регулятор, как и схем самого регулятора, рассмотрим два варианта.
Подключим через регулятор напряжения
Простейший вариант регулировки электродвигателя стиральной машины – использование любого регулятора напряжения (диммера, гашетки от дрели и прочего). Смысл регулировки в том, что на двигатель подается сначала максимальное напряжение, и он вращается с максимальной скоростью. Поворачивая тумблер диммера, мы уменьшаем напряжение, и двигатель соответственно начинает снижать обороты. Схема подключения следующая:
- один провод катушки соединяем с одним проводом якоря;
- второй провод катушки подключаем к сети;
- второй провод якоря соединяем с диммером, а второй выход диммера подключаем к сети;
- производим пробный пуск двигателя.
Проверяем, как работает двигатель на минимальной мощности. Вы можете убедиться, что даже на минимальной мощности обороты без нагрузки внушительны, но стоит только прислонить деревянный брусочек к вращающейся оси, и двигатель тут же останавливается. Каков вывод? А вывод таков, что данный способ регулировки оборотов электродвигателя стиральной машины приводит к катастрофической потере мощности при уменьшении напряжения, что неприемлемо, если вы собираетесь делать из двигателя какую-то самоделку.
Важно! При запуске двигателя стиральной машины соблюдайте технику безопасности. Обязательно закрепите двигатель перед пуском, кроме того не стоит прикасаться руками к вращающимся элементам.
Изначально мы ставили задачу научиться своими руками регулировать обороты двигателя стиральной машины без потери или с минимальной потерей мощности, но возможно ли это? Вполне возможно, просто схема подключения несколько усложнится.
Через микросхему
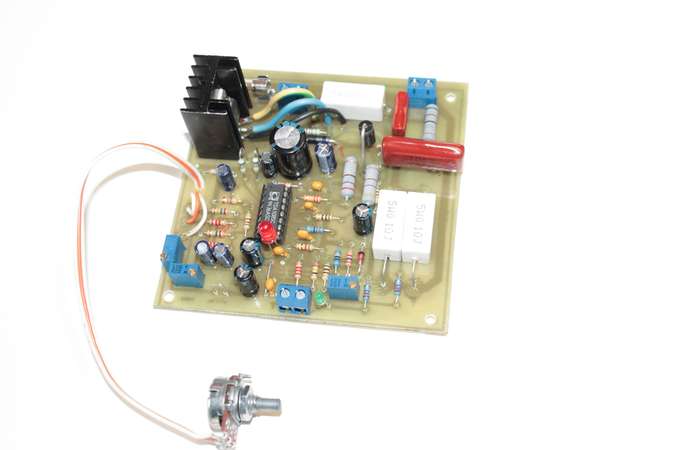
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону. Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
arduino — Как уменьшить скорость двигателя без потери максимального крутящего момента
Кажется, вы не знаете, что вам нужно. Если вы хотите уменьшить скорость двигателя, но вам все еще нужен максимальный крутящий момент, вы должны подать на двигатель полную номинальную электрическую мощность и поставить на двигатель механический тормоз, пока он не снизится до желаемой скорости. Или вы должны каким-то образом сделать ваш мотор менее эффективным. Не думаю, что ты этого хочешь.
Подумайте об этом так: электрическая мощность — это произведение тока \ $ I \ $ и напряжения \ $ E \ $:
$$ P = I E $$
Механическая мощность — это произведение крутящего момента (\ $ \ tau \ $, в ньютон-метрах) и угловой скорости (\ $ \ omega \ $, в радианах в секунду):
$$ P = \ tau \ omega $$
Двигатель — это преобразователь электрической энергии в механический.Механическая мощность всегда равна электрической мощности после потерь.
Кроме того, ток пропорционален крутящему моменту, потому что чем больше ток вы применяете, тем сильнее магнитное поле внутри двигателя, и притяжение между полюсами двигателя становится больше.
Если механическая и электрическая мощности соотносятся, а также ток и крутящий момент, тогда должны быть также согласованы напряжение и скорость. И они есть, потому что чем быстрее ротор вращается через поле статора, тем большую обратную ЭДС он будет генерировать.Это закон индукции Фарадея.
Итак, если вы хотите уменьшить скорость, уменьшите напряжение. Если вы хотите уменьшить крутящий момент, уменьшите ток. Если вы увеличиваете крутящий момент (скажем, тормозя двигатель), вы увеличиваете крутящий момент двигателя. Но если не менять подачу электроэнергии, то и механическая мощность не изменится. Если крутящий момент увеличивается, единственный способ сохранить механическую мощность постоянной — это снизить скорость, чтобы двигатель замедлился.
Здесь есть одна загвоздка: с увеличением крутящего момента растет и ток.2 $$
Таким образом, по мере увеличения тока резистивные потери увеличиваются, что делает двигатель менее эффективным преобразователем электрической энергии в механическую, поскольку часть этой электрической энергии теперь выделяет тепло. Если вы остановите двигатель, то он достигнет КПД 0%: скорость равна нулю, поэтому механическая мощность должна быть равна нулю, но двигатель потребляет тонну тока, и есть падение напряжения на сопротивлении обмотки, поэтому электрическая мощность очень высоко.
Интересный факт: если вы можете сделать двигатель без сопротивления обмотки (или других потерь) и подключить его к идеальному источнику напряжения, то регулирование скорости (насколько скорость изменяется с крутящим моментом) идеально.То есть двигатель не замедлится, если вы попытаетесь его остановить: он просто потребляет ровно столько тока от вашей батареи, чтобы продолжать вращаться с той же скоростью, несмотря ни на что.
PWM здесь не имеет отношения. ШИМ-управление двигателем — это просто способ эффективно подать на двигатель напряжение ниже полного. Это работает, потому что двигатель с ШИМ-управлением эквивалентен понижающему преобразователю. Изменение рабочего цикла ШИМ эквивалентно изменению напряжения питания:
Максимальный крутящий момент, который вы можете иметь (который вы получите при остановке двигателя), ограничен током, который может подавать ваш источник питания, и потерями в двигателе, как и без ШИМ.Ваш ШИМ-драйвер может добавить немного сопротивления в схему, немного уменьшив ток и крутящий момент, но обычно это не имеет значения по сравнению с сопротивлением обмоток двигателя.
dc — контроллер скорости двигателя, из-за которого реле теряет напряжение и перестает работать
У меня проблемы с подключением ползунка камеры, когда двигатель перемещает камеру к одному концу ползунка и нажимает 3-контактный переключатель NC / NO / C, который запускает 8-контактное реле DPDT 12 В для изменения полярности двигателя и переместитесь к другому концу ползунка и активируйте другой переключатель.Камера продолжает «пинг-понг» туда-сюда как надо. Я в основном следую этому примеру: http://cheesycam.com/cheesycam-diy-auto-reverse-polarity-motorized-video-slider-update/
Вот схема подключения из поста cheesycam:
Проблема в том, что мне нужно иметь возможность управлять скоростью камеры, поэтому я добавил к двигателю регулятор скорости. Контроллер скорости снижает напряжение, чтобы замедлить двигатель, что приводит к прекращению работы реле, когда скорость / напряжение становятся достаточно низкими.
Вот моя электрическая схема:
Есть ли способ сохранить регулятор скорости без снижения напряжения (и, следовательно, прекращения работы реле)? Имеет ли смысл использовать реле более низкого напряжения (например, 6 В постоянного тока), чтобы оно работало в более широком диапазоне скоростей?
Я думал, что могу переместить контроллер скорости непосредственно между двигателем и реле (в основном использовать выход реле как вход для контроллера скорости, а затем использовать выход контроллера скорости непосредственно на двигатель), но не смог заставить его работать .
Вот связанное сообщение о той же схеме, которую я пытаюсь построить, но в ответе используется реле 3PDT (и, к тому же, я, к сожалению, не могу прочитать схему подключения): Добавление контроля скорости для двигателя постоянного тока
Я совершенно не разбираюсь в электрических схемах, поэтому приветствую любую помощь или идеи.
** ОБНОВЛЕНИЕ ОКОНЧАТЕЛЬНОГО РЕШЕНИЯ: @Charlie предоставил решение после нескольких разговоров. Вот окончательное рабочее решение:
В идеале, это должно быть связано с реле 3PDT, но все, что у меня было под рукой, было 4PDT, поэтому последний из 4 переключателей реле не использовался.Это отлично работает, и контроллер скорости теперь не зависит от напряжения реле, поэтому реле продолжает работать и меняет полярность / направление двигателя даже на низких скоростях.
Сопротивление— Могу ли я использовать резистор для замедления двигателя постоянного тока?
Использование шестерен всегда лучше, потому что это метод, который обеспечивает максимальный процент мощности двигателя. Поскольку мощность — это крутящий момент, умноженный на скорость, сохранение большей части мощности двигателя увеличивает крутящий момент при одновременном снижении скорости.
Широтно-импульсная или амплитудно-импульсная модуляция занимает второе место. Это может сохранить максимальный крутящий момент при одновременном снижении рабочей скорости и мощности. Лучший способ поддерживать крутящий момент — это иметь внутренний контур управления, который регулирует крутящий момент путем регулирования тока. Внешний контур управления регулирует скорость и обеспечивает текущее задание. Поскольку используется импульсный стабилизатор, потери мощности меньше, чем при использовании линейного управления или последовательного сопротивления.
Разумеется, можно использовать последовательный резистор. Это может быть переменное сопротивление (реостат) или один или несколько постоянных резисторов. При использовании последовательного резистора потери мощности прямо пропорциональны процентному снижению скорости. Поскольку нет контроля тока, добавление сопротивления увеличивает изменение скорости в результате любого изменения нагрузки. Изменение скорости из-за изменения нагрузки увеличивается пропорционально уменьшению скорости. Также существует изменение скорости, вызванное изменением сопротивления из-за изменения температуры резистора.
Дополнительные соображения
Если требуется не только «замедление», но и регулировка скорости, лучше всего выбрать передачу для надлежащей максимальной скорости, а затем использовать электронное управление для обеспечения изменения. Большие двигатели постоянного тока редко используются для работы с фиксированной скоростью, но электронное управление или последовательное сопротивление могут потребоваться только для запуска более мощного двигателя постоянного тока, чтобы избежать чрезмерного пускового тока.
Для очень маленьких двигателей постоянного тока последовательное сопротивление может быть вполне достаточным в некоторых ситуациях в зависимости от различных факторов, таких как источник питания, рабочий цикл, анализ затрат, максимальное снижение скорости, стабильность нагрузки и т. Д.
Как ток и напряжение связаны с крутящим моментом и скоростью бесщеточного двигателя?
Соотношение между электрическими характеристиками двигателя и механическими характеристиками может быть рассчитано как таковое (примечание: это анализ для идеального щеточного двигателя постоянного тока, но некоторые из его результатов все же должны применяться к неидеальному бесщеточному двигателю постоянного тока).
Двигатель постоянного тока можно представить как цепь с резистором и источником обратной ЭДС напряжения. Резистор моделирует собственное сопротивление обмоток двигателя.Обратная ЭДС моделирует напряжение, генерируемое движущимся электрическим током в магнитном поле (в основном электродвигатель постоянного тока может работать как генератор). Также возможно смоделировать собственную индуктивность двигателя, добавив катушку индуктивности последовательно, однако по большей части я проигнорировал это и предположил, что двигатель находится в квазистационарном состоянии электрически, или во временном отклике двигателя преобладает временная характеристика. механических систем вместо времени отклика электрических систем.Обычно это правда, но не всегда так.
Генератор вырабатывает противо-ЭДС, пропорциональную скорости двигателя:
$$ V_ {emf} = k_i * \ omega
$Где:
$$ k_i = \ text {константа.} $$ $$ \ omega = \ text {скорость двигателя в} \ \ text {rad} / \ text {s} $$
В идеале на скорости сваливания обратная ЭДС отсутствует, а на скорости холостого хода обратная ЭДС равна напряжению источника возбуждения.
Затем можно рассчитать ток, протекающий через двигатель:
$$ I = (V_S — V_ {emf}) / R = (V_S — k_i * \ omega) / R $$ $$ V_S = \ text {напряжение источника} $$ $$ R = \ text {электрическое сопротивление двигателя} $$
Теперь рассмотрим механическую сторону мотора.Крутящий момент, создаваемый двигателем, пропорционален величине тока, протекающего через двигатель:
$$ \ тау = k_t * I
$$$ k_t = \ text {константа} $$ $$ \ tau = \ text {крутящий момент} $$
Используя приведенную выше электрическую модель, вы можете проверить, что на скорости остановки двигатель имеет максимальный ток, протекающий через него, и, следовательно, максимальный крутящий момент. Кроме того, на скорости холостого хода двигатель не имеет крутящего момента и тока, протекающего через него.
Когда двигатель производит наибольшую мощность? Что ж, мощность можно рассчитать двумя способами:
Электроэнергия: $$ P_e = V_S * I
$Механическая мощность: $$ П_м = \ тау * \ омега
$Если вы построите график, то обнаружите, что для идеального двигателя постоянного тока максимальная мощность достигается при половине скорости холостого хода.
Итак, учитывая все обстоятельства, как складывается напряжение двигателя?
Для того же двигателя, в идеале, если вы подадите удвоенное напряжение, вы удвоите скорость холостого хода, удвоите крутящий момент и в четыре раза увеличите мощность. Это, конечно, при условии, что двигатель постоянного тока не сгорит, не достигнет состояния, которое нарушает эту упрощенную идеальную модель двигателя и т. Д.
Однако между разными двигателями невозможно сказать, как два двигателя будут работать по сравнению друг с другом, основываясь только на номинальном напряжении.Итак, что вам нужно для сравнения двух разных двигателей?
В идеале вам нужно знать номинальное напряжение и ток останова, чтобы вы могли соответствующим образом спроектировать свою электронику, и вам нужно знать скорость холостого хода и крутящий момент, чтобы вы могли рассчитать механические характеристики вашего двигателя. Вы также можете посмотреть номинальный ток двигателя (некоторые двигатели могут быть повреждены, если вы остановите их слишком долго!). Этот анализ также несколько пренебрегает аспектом эффективности двигателя. Для идеально эффективного двигателя \ $ k_i = k_t \ $, или, скорее, \ $ P_e = P_m \ $.Это приведет к тому, что расчеты мощности с использованием двух уравнений будут равны (т. Е. Электрическая мощность равна механической мощности). Однако настоящие двигатели не совсем эффективны. Некоторые близки, некоторые нет.
шт. В своих расчетах я использовал скорость двигателя как \ $ \ text {rad} / \ text {s} \ $. Это можно преобразовать в Гц или \ $ \ text {rev} / \ text {s} \ $, разделив на \ $ 2 \ pi \ $ ..
Управление скоростью двигателя: 16 шагов
Однако, прежде чем мы сможем настроить схему контроллера двигателя, нам сначала нужно обсудить некоторые внешние компоненты.
Прежде всего, при работе с сильноточными приложениями настоятельно рекомендуется последовательно подключить сильноточный предохранитель к вашей цепи, рассчитанной на немного меньший, чем максимальный ток контроллера мотора. Дешевле заменить предохранитель на 250 А за 15 долларов, чем на контроллер мотора за 400 долларов. Пока ток в цепи поддерживается ниже максимального значения контроллера мотора, вам никогда не придется беспокоиться о перегреве управляющей электроники.
Предохранитель необходимо подключить последовательно между кабелем аккумулятора и кабелем, который будет обеспечивать питание остальной цепи.
После установки открытые металлические части предохранителя необходимо изолировать термоусадкой для предотвращения возможных коротких замыканий. Рекомендуется использовать либо прозрачную термоусадочную трубку, либо оставить зазор, позволяющий видеть смотровое окошко предохранителей. Возможность быстро и визуально идентифицировать перегоревший предохранитель избавит вас от многих головных болей и догадок.
После предохранителя следующий компонент, который должен быть подключен последовательно, называется главным контактором (иногда также ошибочно называют «соленоидом»).При работе с такими большими двигателями предполагается, что питание контроллера двигателя будет включаться и выключаться с помощью сильноточного главного контактора.
Этот компонент, по сути, просто очень большое реле. Когда электромагнит в главном контакторе находится под напряжением, соленоид внутри него включает переключатель, который позволяет току постоянного тока протекать к двигателю. Когда катушка не находится под напряжением, переключатель перевернут, и электричество не может течь.
Для поддержания главного контактора в рабочем состоянии необходимы два дополнительных компонента.Первый — это диод 1N5408, который служит демпфирующим диодом на катушке для защиты от всплесков обратного напряжения и предохраняет компоненты, расположенные дальше по линии, от перегорания.
Это, конечно, предполагает, что вы используете главный контактор на 200 А. Если вы используете контактор большего размера, вам следует проверить спецификацию соответствующего диода.
Второй необходимый компонент — это сильноточный резистор предварительной зарядки 250 Ом 10 Вт, подключенный через сильноточные контакты.Этот резистор позволяет напряжению обходить контактор и заряжать очень большие конденсаторы в контроллере двигателя. Причина, по которой вы хотите это сделать, заключается в том, что если включить соленоид без предварительной зарядки конденсаторов, произойдет скачок тока, поскольку конденсаторы будут пытаться потреблять как можно больше тока. Такой большой ток на клеммах контактора потенциально может привести к точечной сварке их в положении «включено». Проще говоря, ваш главный контактор не сможет выключиться, и питание вашего двигателя будет зависнуть.
Опять же, если вы используете контактор большего размера, чем тот, который показан на рисунке, проверьте таблицу на наличие резистора предварительного заряда подходящего размера.
Подключите резистор предварительной зарядки между клеммами высокого тока на главном контакторе и демпфирующий диод между клеммами катушки низкого тока.
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Введение
Скорость двигателя — это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру.Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Эта блок-схема, показанная ниже, представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Система управления с обратной связью для скорости двигателя постоянного тока
Датчики Холла и оптические датчикиобычно используются с цифровыми контроллерами, тогда как в аналоговых схемах часто используются тахогенераторы.С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и регулировать скорость без каких-либо датчиков на двигателе, используя основную характеристику — напряжение обратной ЭДС, зависящее от скорости.
Бессенсорное аналоговое измерение скорости двигателя
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС.Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения, превышающего сопротивление катушки.
Эквивалентная схема электродвигателя постоянного тока с щеткой
Падение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки). Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно — хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку измерить обратную ЭДС напрямую невозможно, нам необходимо рассчитать ее по следующему уравнению:
$$ V_ {мотор} = V_ {bemf} + (I_ {a} \ times R_ {a}) $$
К сожалению, напрямую измерить напряжение якоря также невозможно — однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем. Измерение падения напряжения на этом последовательном резисторе позволяет нам определить обратную ЭДС.
Эквивалентная схема электродвигателя постоянного токас последовательным резистором
Если мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения в якоре:
$$ V_ {a} = I_ {a} \ times R_ {a} $$
$$ V_ {s} = I_ {a} \ times R_ {s} $$
$$ R_ {s} = R_ {a} $$
$$ V_ {s} = V_ {a} $$
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя.Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания. При использовании последнего предпочтительно использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как:
$$ V_ {supply} = I_ {stall} \ times R_ {a} $$
$$ R_ {a} = \ frac {V_ {supply}} {I_ {stall}} $$
$$ R_ {a} = \ frac {1.2 В} {100 мА} $$
$$ R_ {a} = 12 \ Omega $$
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при разных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.
$$ V_ {supply} = V_ {s} + V_ {a} + V_ {bemf} $$
Мы можем рассчитать напряжение обратной ЭДС, вычитая удвоенное падение напряжения на последовательном резисторе из напряжения питания.
$$ V_ {bemf} = V_ {supply} — (2 \ times V_ {s}) $$
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге снизит напряжение, воспринимаемое двигателем. Используя мостовую схему, мы можем сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДС
Правая опора моста состоит из последовательно соединенных электродвигателя M и резистора Rs .Левая ножка представляет собой последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа схемы без обратной ЭДС, т.е. когда двигатель остановлен. Для балансировки моста напряжение между точками A, и B, должно быть равно нулю. Это происходит до тех пор, пока соотношение между R1 и R2 такое же, как Rs и Ra :
$$ \ frac {R_ {2}} {R_ {1}} = \ frac {R_ {a}} {R_ {s}} $$
ч — коэффициент усиления нашего моста:
$$ h = \ frac {R_ {1}} {R_ {2}} = \ frac {R_ {s}} {R_ {a}} $$
Если мы выведем двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости:
$$ V_ {bemf} = k_ {e} \ times n $$
, где кэ, — электрическая постоянная для нашего двигателя, а n — скорость двигателя.
Если двигателю разрешено вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на холостом ходу:
$$ V_ {rpm_ {NL}} = k_ {e} \ times n_ {NL} $$
Отсюда Vbemf можно подписать как:
$$ V_ {bemf} = V_ {rpm_ {NL}} \ times \ frac {n} {n_ {NL}} = V_ {rpm_ {NL}} \ times K $$
Где K — коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.{2} \ times R_ {load}} \ times R_ {load} $$
А для работы без нагрузки:
$$ V_ {rpm} = \ frac {h} {h + 1} \ times V_ {rpm_ {NL}} \ times K $$
Выходное напряжение между точками A и B не зависит от источника питания и тока двигателя, как без нагрузки, так и при работе под нагрузкой. Он зависит от х , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры, что приводит к разбалансировке моста и влиянию на выход В об / мин .Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для регуляторов скорости вращения ротора, используемых в магнитофонах, использующих аналоговую электронику. В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие ИС включают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства, и теперь они доступны только на вторичном рынке. Схемы в микросхемах немного отличались, но принцип работы по-прежнему основан на мостовой схеме, описанной выше.
LA5586 Эквивалентная цепь регулятора скорости двигателя и прикладная схема
Обратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначен как K .В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера двигателя
В установившемся режиме ток двигателя в K в раз больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя.Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, и выходное напряжение усилителя также увеличивается. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя.Регулировка скорости может быть достигнута путем добавления шунтирующего резистора — напряжение между точками A, и B всегда равно опорному напряжению, поэтому легко контролировать дополнительный ток, добавленный к Rt .
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений на Rt и Rs ( Vref ). Уравнение установившегося состояния:
$$ I_ {m} \ times R_ {m} + V_ {bemf} = R_ {T} \ times I_ {s} + R_ {T} \ times \ frac {I_ {s} + I_ {m}} { K} + V_ {ref} $$
Отсюда уравнение для обратной ЭДС:
$$ V_ {bemf} = V_ {ref} + (1+ \ frac {1} {K}) \ times R_ {T} \ times I_ {s} + \ frac {R_ {T}} {K — R_ {m}} \ times I_ {m} $$
Предполагая:
$$ K \ times R_ {m} = R_ {T} $$
, то количество оборотов, определяемое Vbemf , составляет:
$$ V_ {bemf} = V_ {ref} + R_ {T} \ times (1+ \ frac {1} {K}) \ times I_ {s} $$
Важно, чтобы во всех случаях Rt было меньше, чем K x Rm , иначе цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Также уменьшается обратная ЭДС и напряжение на двигателе, этот метод управления известен как регулятор отрицательного вывода.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наш R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и его снова можно опустить.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось В об / мин , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателя
Входное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1.По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, установив напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже — добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателя
Соотношение R1 и R2 должно быть таким же, как Rs и Ra для обеспечения стабилизации скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, значение R2 должно быть увеличено (или R1 должно быть уменьшено). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС при желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью высокоомного вольтметра.
- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Рекомендуется получить среднее значение из нескольких различных измерений положения ротора.
- Выберите значение для Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверьте скорость и соответствующим образом компенсируйте (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя — для меди это 3400 частей на миллион. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скорости
В этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже напряжения на выводах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 представляют собой схему запуска, помогающую преодолеть статическое трение, в то время как C1 представляет собой конденсатор компенсации частоты, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированной микросхемой
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
Цепь регулятора скорости132-100 и AN6651
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше, чем внутреннее сопротивление двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя:
$$ K = 40 $$
$$ R_ {1} = K \ times R_ {m} $$
Например, используя стандартное значение 390 Ом для R1 (меньшее значение снижает склонность к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3. Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин.Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, \ (R_ {m} = 10 \ Omega \)
- Входное напряжение без нагрузки при скорости 2400 об / мин, \ (V_ {m} = 3,87 В \)
- Ток без нагрузки при скорости 2400 об / мин, \ (I_ {m} = 23 мА \)
Мы можем рассчитать падение напряжения на внутреннем сопротивлении как:
$$ 23 мА \ раз 10 \ Омега = 0,23 В $$
, и мы также можем рассчитать Vbemf как:
$$ 3,87 В- 0,23 В = 3.65 В $$
В установившемся состоянии, когда цепь сбалансирована, уравнение для цепи:
$$ I_ {m} \ times R_ {m} + V_ {bemf} = R_ {1} \ times (I_ {R2R3} + \ frac {I_ {R2R3} + Im} {K} + V_ {ref} $ $
Из этого уравнения мы можем рассчитать обратную ЭДС:
$$ V_ {bemf} = V_ {ref} + R_ {1} \ times (1+ \ frac {1} {40}) \ times I_ {R2R3} $$
Как мы знаем из даташита Vref = 1V, значит:
$$ I_ {R2R3} = \ frac {V_ {bemf} — V_ {ref}} {R_ {1} \ times (1+ \ frac {1} {40})} $$
На наш мотор у нас:
$$ I_ {R2R3} = \ frac {3.64 — 1} {390 \ times (1 + \ frac {1} {40})} $$
$$ I_ {R2R3} = 0,0051 А = 5,1 мА $$
С помощью этого значения мы можем рассчитать последовательное сопротивление R2 и R3 :
$$ I_ {R2R3} = \ frac {V_ {ref}} {R2 + R3} $$
$$ R_ {2} + R_ {3} = \ frac {V_ {ref}} {I_ {R2R3}} $$
$$ R_ {2} + R_ {3} = 195 \ Omega $$
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Вычисленные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также является значительным (между 0.8 — 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет установке регулировать скорость, и его следует откалибровать через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующее смещение сопротивления.
Прецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основное улучшение — это работа при низком напряжении благодаря использованию опорного сигнала с малой шириной запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
Схема на основе ОУ стабилизации скорости двигателя
В этой схеме напряжение компенсации снимается с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя, чтобы уменьшить потери мощности. Вторая опора моста образована из R6 и R7 .Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя. В качестве типичного значения можно выбрать R8 , тогда следует выбрать R6 и R7 для компенсации внутреннего падения напряжения. Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Схема стабилизации на основе прецизионных микроприводов ОУ
Регулятор скорости на транзисторах
Двухтранзисторный регулятор скорости двигателя
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, и D1 работает как опорное напряжение. Обратная ЭДС двигателя больше опорного напряжения — в зависимости от R2 , R3 и R4 Делитель напряжения :
- Во-первых, нам нужно установить коэффициент делителя напряжения, наше опорное напряжение составляет 1,2 В, а когда желаемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: \ ( \ frac {3.6} {1.2} = 3 \)
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 легко. Нам нужно, чтобы соотношение делителя напряжения R6 , R8 и внутреннего сопротивления двигателя было одинаковым.
Этот контур разработан для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в диапазонах очень низких скоростей. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам необходимо внести некоторые изменения:
Трехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая версия с двумя транзисторами, но основным улучшением является увеличение коэффициента усиления для опорного напряжения транзистором Q2 . Это позволяет нам использовать опорное напряжение с микромощной запрещенной зоной, которое более стабильно, чем стандартные диоды.Еще одно улучшение от добавления Q2 — это температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме опорное напряжение равно LM385 — 2,5 В и напряжение Vbe из Q2 :
.$$ V_ {ref} = V_ {bg_ {ref}} + V_ {be} = 1,2 В + 0,7 В = 1,9 В $$
Если нам нужно, чтобы Vbemf было 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должны иметь такое же соотношение, как R2 , R3 и R4 делителя напряжения (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Режим переключения аналогового регулятора скорости
В этой статье описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Регулирование скорости двигателя с использованием обратной ЭДС в режиме переключения аналоговой схемы
Этот контроллер состоит из модулятора ШИМ, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «слежения и удержания»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, и Vm равно Vbemf , что пропорционально скорости двигателя.Срабатывает схема выборки и хранения, которая сохраняет выборку Vbemf в конденсаторе .
Узел суммирования затем вычисляет разность между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Vbemf , соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивной природы двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора.Когда транзистор переключается, генерируется сильный индуктивный всплеск, и индуктивный рециркуляционный ток Ir течет через реверсивный диод. Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателя
Этот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения обратной ЭДС и выхода ШИМ
В этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель запитан.
Цепь выборки и хранения состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель запитан от T1 , Q2 включен, а узел R13 и D2 замкнут на землю, что не позволяет ему сделать выборку, когда Vcc подается на двигатель. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). Когда обратная ЭДС увеличивается, выходное напряжение на IC1A также увеличивается — это смещает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется как \ (\ frac {R_ {5}} {R_ {5} + R_ {10}} \), а постоянная времени определяется как R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя.Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменить время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением от R7 до R8 || R9 , однако, поскольку схема выборки и хранения очень проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не должен использоваться для широкого диапазона. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для практического использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на основе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет тенденцию к колебаниям
Аналоговый импульсный регулятор скорости на двигателе постоянного тока 132-100
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏
中
Германия Электронная почта
Максон Мотор ГмбХ
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роуд,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Эл. Почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Эл. Почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane,
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
Прецизионные двигатели maxon, inc.