Пдд 2018 начало движения и маневрирование: Маневрирование транспортного средства по пдд
Маневрирование главное при разворете гле разрешено
Пункт ПДД: 8. Перед началом движения, перестроением, поворотом разворотом и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения. Сигналу левого поворота разворота соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
Дорогие читатели! Наши статьи рассказывают о типовых способах решения юридических вопросов, но каждый случай носит уникальный характер.
Если вы хотите узнать, как решить именно Вашу проблему — обращайтесь в форму онлайн-консультанта справа или звоните по телефонам, представленным на сайте.
ПДД | 8. Начало движения, маневрирование
ВИДЕО ПО ТЕМЕ: Mercedes-AMG GLE 43 Coupe — Orange Art Edition — Faisal KhanЧто нужно знать о клапане EGR: причины неисправности, последствия, ремонт. Либо выберите другие номера вопросов. Перед началом движения, перестроением, поворотом разворотом и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой.
Пункт 8. Показать подсказку и правильный ответ. Поднятая вверх рука водителя легкового автомобиля является сигналом, информирующим Вас о его намерении:.
У водителя не работает световая сигнализация, поэтому он вынужден подавать соответствующие сигналы рукой. Согласно знаку 2. Поднятая вверх рука информирует о намерении притормозить для того, чтобы уступить дорогу мотоциклисту. Двигаясь по левой полосе, водитель намерен перестроиться на правую.
На каком из рисунков показана ситуация, в которой он обязан уступить дорогу? Водитель, двигающийся по левой полосе уступает. На правом рисунке одновременное перестроение.
Помеха с права у водителя, двигающего также по левой полосе. Он уступает дорогу и в этой ситуации. Разворот запрещён на железнодорожном переезде, границами которого являются шлагбаумы, а при их отсутствии — знаки 1. В нашем случае железнодорожный переезд без шлагбаума.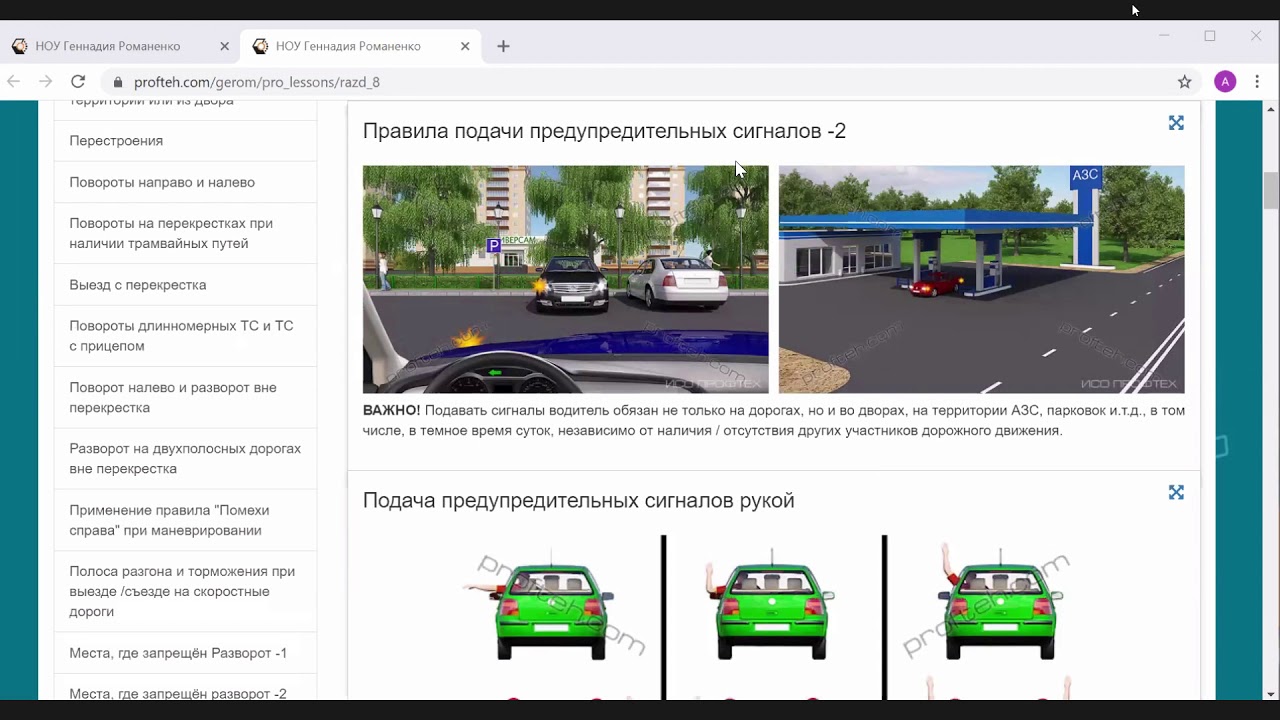
Вы можете совершить разворот по указанной траектории, так как совершаете его на безопасном удалении от железнодорожных путей. Подача сигнала указателями поворота должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения. При этом сигнал не должен вводить в заблуждение других участников движения.
Правильный ответ — второй. При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
Впереди перекрёсток. Прежде, чем совершить на нём поворот или разворот, необходимо было перестроиться на левую крайнюю полосу. Вы этого своевременно не сделали.
Разворот по данной траектории является нарушением. Пункты 8. Вы намерены продолжить движение по главной дороге. Обязаны ли Вы при этом включить указатели правого поворота? Независимо от того, куда Вы будете поворачивать на перекрёстке, налево или направо по главной дороге, обязательно следует включить соответствующий указатель поворота.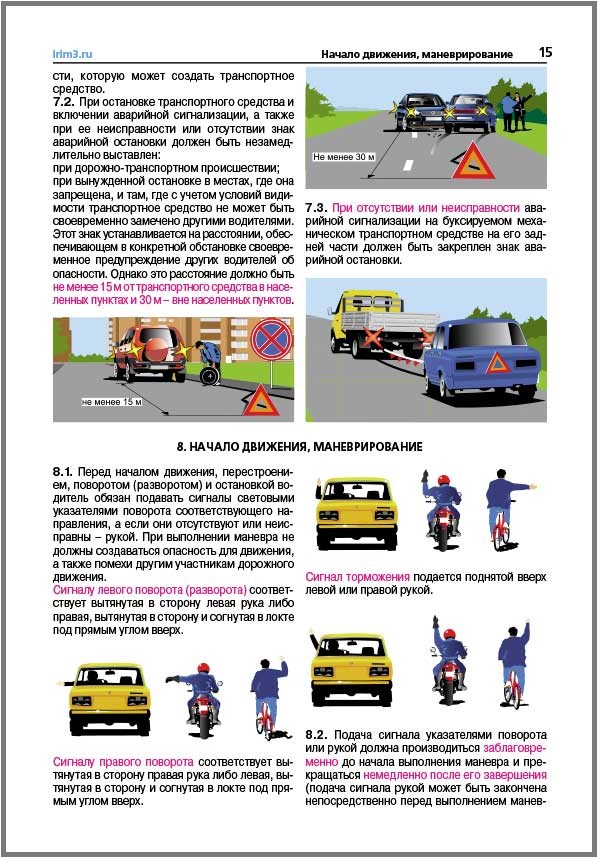 В данной ситуации — включите правый указатель поворота.
В данной ситуации — включите правый указатель поворота.
Знак 5. В любом случае при перестроении с неё необходимо уступить дорогу транспортным средствам движущимся попутно без изменения направления движения. Снизить скорость следует только на полосе торможения. Правильный ответ — второй. Обязаны ли Вы включить указатели левого поворота? Вы намерены совершить маневр-поворот налево — обязательно информируйте других участников дорожного движения об этом, включив указатель поворота.
Помеха справа у водителя грузовика. Он уступает дорогу. Вы завершили перестроение на встречную полосу, прекращаете подачу сигнала немедленно. Опережая транспортное средство по встречной полосе, сигнал не подаёте. Обязан ли водитель легкового автомобиля уступить дорогу водителю грузового автомобиля?
По ходу Вашего движения дорога делает поворот направо. Разворот разрешён только при видимости дороги более м. Показанная траектория состоит из трёх фаз. Первая фаза — перестроение в параллельный ряд. Как только Вы его закончили, выключите левый сигнал указателя поворота. Вторая фаза — двигаетесь в параллельном ряду — включать сигналы не следует.
Как только Вы его закончили, выключите левый сигнал указателя поворота. Вторая фаза — двигаетесь в параллельном ряду — включать сигналы не следует.
Третья фаза — перестроение, возвращение на ранее занимаемую полосу. Перед перестроением включаете правый сигнал поворота. Закончив перестроение, выключаете его. Правильный ответ — первый. В случае отсутствия знака 5. Но на перекрёстках , перед которыми и на которых имеются знаки 5. Ваши действия всегда должны быть понятны остальным участникам дорожного движения. О своих намерениях Вы должны информировать заблаговременно до начала выполнения маневра.
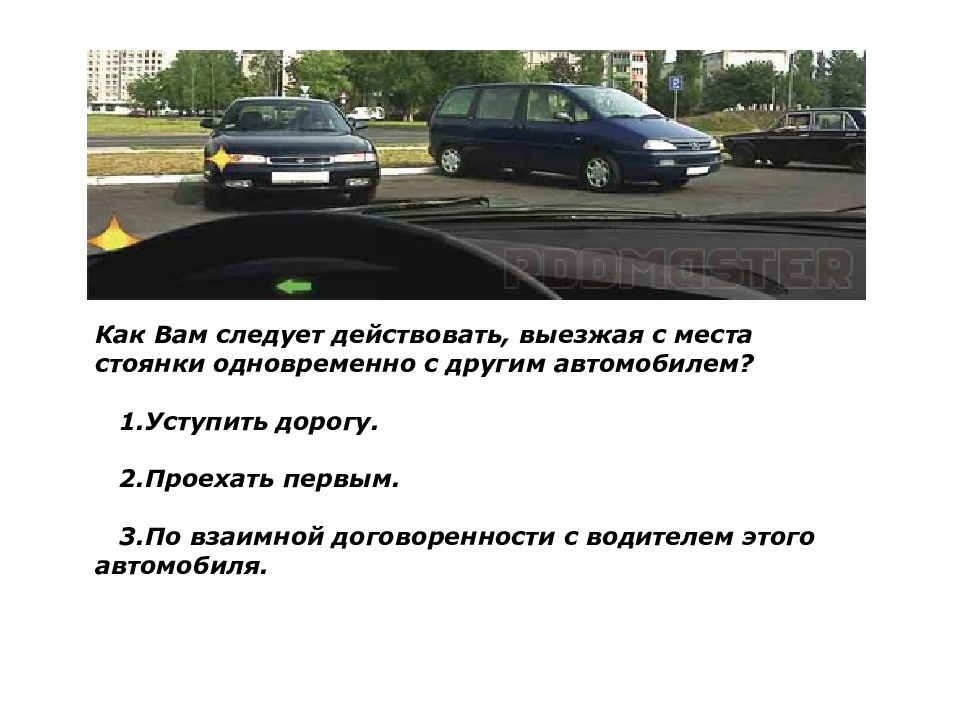
Водитель, намеревающийся начать движение после остановки или стоянки, обязан подавать сигнал соответствующего направления и начинать движение лишь убедившись, что маневр будет безопасен и не создаст помех другим участникам дорожного движения. Разворот в местах остановок маршрутных транспортных средств запрещён при любых обстоятельствах.
Вы намерены произвести разворот на перекрестке. Какие указатели поворота необходимо включить перед въездом на перекресток? Въезд на перекрёсток с круговым движением соответствует повороту направо. Соответственно включаете правый указатель поворота. Двигаясь по кругу, Вы не изменяете направление движения.
Какие указатели поворота необходимо включить перед въездом на перекресток? Въезд на перекрёсток с круговым движением соответствует повороту направо. Соответственно включаете правый указатель поворота. Двигаясь по кругу, Вы не изменяете направление движения.
Сигналы не используете. При съезде с перекрёстка опять совершаете правый поворот и опять заблаговременно включаете правый указатель поворота. Перед поворотом налево, направо водитель должен заблаговременно занять крайнее положение на проезжей части. Дорога с односторонним движением, выезд с неё исключением не является. Водитель легкового автомобиля въезжает на дорогу с полосы разгона.
Он обязан уступить дорогу транспортным средствам, движущимся по этой дороге. Что должно иметь решающее значение при выборе водителем скорости движения в тёмное время суток? Очень важным моментом при движении в ночное время является выбор скорости движения. При этом следует учитывать главное условие — расстояние видимости водителем дороги должно превышать величину остановочного пути. Правильный ответ — третий. Езда ночью. Вы будете перестраиваться. Перед перестроением следует подать сигнал правого поворота.
Правильный ответ — третий. Езда ночью. Вы будете перестраиваться. Перед перестроением следует подать сигнал правого поворота.
Вы намерены повернуть налево на этом перекрёстке. В какой момент следует включить указатели левого поворота? Правила требуют заблаговременно предупреждать других участников дорожного движения об изменении намерений в движении. Подаваемый Вами сигнал не должен вводить в заблуждение других водителей. В рассматриваемой ситуации следует включить указатель поворота после въезда на первое пересечение проезжих частей. Помеха у водителя легкового автомобиля.
Разворот на мостах запрещён. Подача сигнала рукой может быть закончена непосредственно перед выполнением маневра. Въезд на перекрёсток, на котором организовано круговое движение, в виде исключения можно осуществлять с любой полосы данного направления.
Выезд же с перекрёстка осуществляется по общим правилам. Впереди поворот. Дома, деревья ограничивают обзор дороги. Разворот возможен лишь при условии, что дорога по ходу движения просматривается на расстоянии не менее м.
Может использоваться для такого сигнала и правая вытянутая рука, но согнутая в локте под прямым углом вверх. Согласно знаку 5.
На дороге с односторонним движением можете двигаться по любой полосе. Поэтому Вам разрешается движение по любой из указанных траекторий. Табличка под знаком 8. При развороте Вы не должны оказаться в месте с видимостью дороги хотя бы в одном направлении менее м.
У Вас ещё есть небольшое расстояние, на котором можете совершить разворот. При повороте налево, проезжая перекрёсток, водитель сам определяет траекторию движения, при этом должно быть выполнено условие: автомобиль при пересечении границы проезжих частей должен находиться на своей стороне дороги.
Что нужно знать о клапане EGR: причины неисправности, последствия, ремонт. Либо выберите другие номера вопросов. Перед началом движения, перестроением, поворотом разворотом и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой.
ПДД онлайн. Темы вопросов. Ознакомьтесь со всеми вопросами по теме и комментариями к ним. Если вы уже готовы протестировать свои знания по этой теме — нажмите кнопку «Тренировка».
ПДД 2018 — раздел №8 — Начало движения, маневрирование 
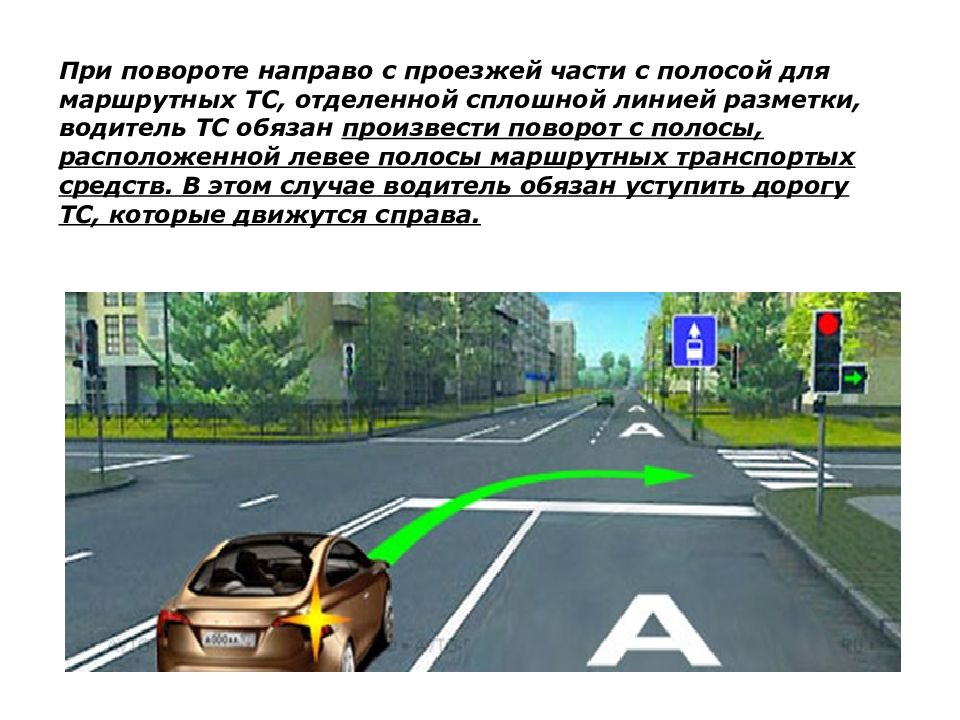
RU Правильный ответ: 1 Вне зависимости от того, где это происходит, присутствуют ли другие транспортные средства, прочих обстоятельств возьмите за обязательное для себя правило перед началом движения подавать соответствующий сигнал поворота. Пункт 8. Вопрос По какой траектории Вы можете продолжить движение? Только по А 2. Если Вам необходима помощь справочно-правового характера у Вас сложный случай, и Вы не знаете как оформить документы, в МФЦ необоснованно требуют дополнительные бумаги и справки или вовсе отказывают , то мы предлагаем бесплатную юридическую консультацию:.
Маневрирование главное при разворете гле разрешено
При выполнении манёвров должны соблюдаться некоторые общие правила. За исключением специально оговоренных случаев, водитель, совершающий манёвр, должен уступить дорогу тем участникам движения, которые не совершают манёвров в данный момент. Перед началом движения, перестроением, поворотом разворотом и остановкой водитель обязан заблаговременно подавать сигналы световыми указателями поворота соответствующего направления и прекращать их подачу сразу после выполнения манёвра. Сигналы подаются везде, включая дворы, АЗС и другие прилегающие территории и всегда, как только возникает ситуация выбора одной из двух возможных траекторий движения.
Маневр разворота требует сравнительно широкой проезжей части и относительно больших затрат времени. Все перечисленные в данном пункте ПДД места запрещения разворотов представляют собой участки дороги со стесненными условиями движения или обладающие повышенной опасностью.
Все перечисленные в данном пункте ПДД места запрещения разворотов представляют собой участки дороги со стесненными условиями движения или обладающие повышенной опасностью.
Если Вам необходима помощь справочно-правового характера у Вас сложный случай, и Вы не знаете как оформить документы, в МФЦ необоснованно требуют дополнительные бумаги и справки или вовсе отказывают , то мы предлагаем бесплатную юридическую консультацию:. ПДД онлайн. Темы вопросов. Ознакомьтесь со всеми вопросами по теме и комментариями к ним. Если вы уже готовы протестировать свои знания по этой теме — нажмите кнопку «Тренировка». Либо выберите другую тему. Тренировка 20 минут на 20 случайных вопросов темы.
Вопросы по теме «Начало движения, маневрирование» из ПДД
.
.
Маневрирование главное при разворете гле разрешено. ПДД онлайн. Темы вопросов. Ознакомьтесь со всеми вопросами по теме и комментариями к.
.
.
.
.
.
.
Начало движения, маневрирование
п 8.1 ПДД. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
Сигнал торможения подается поднятой вверх левой или правой рукой.
п 8.2 ПДД. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
п 8.3 ПДД. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
п 8.4 ПДД. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
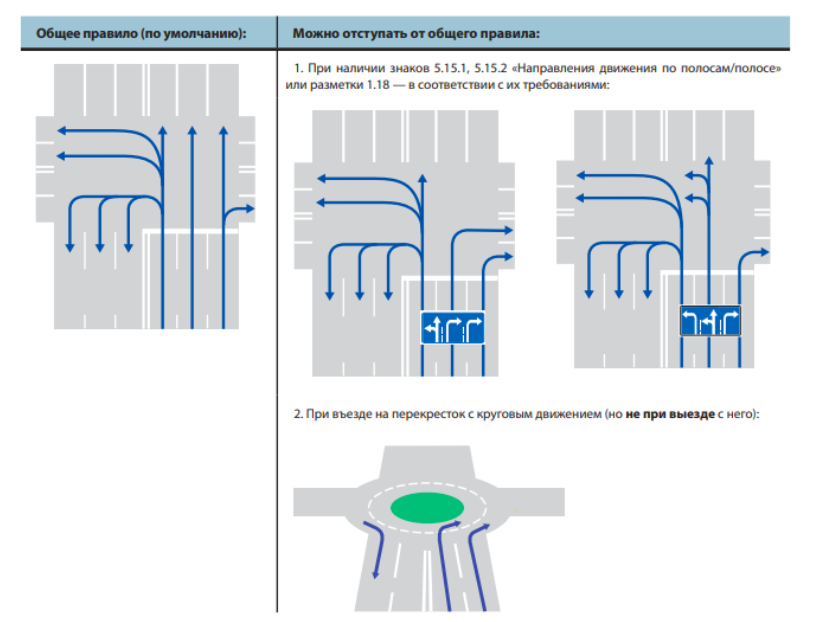
п 8.5 ПДД. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
п 8.6 ПДД. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.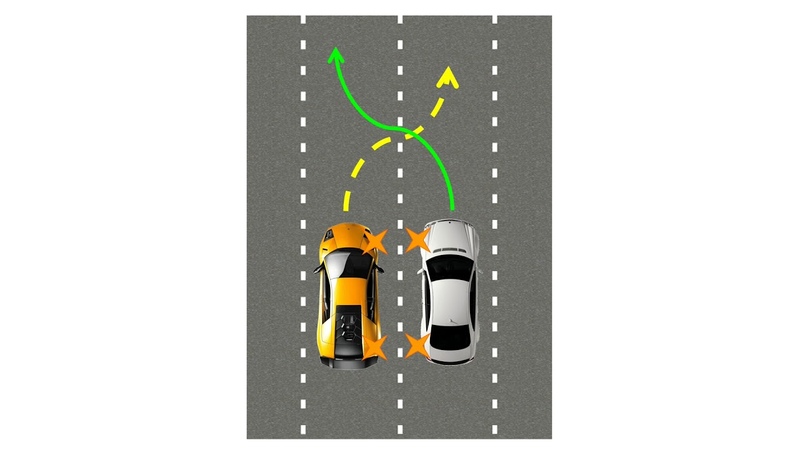
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
п 8.7 ПДД. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
п 8.8 ПДД. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
п 8.9 ПДД. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.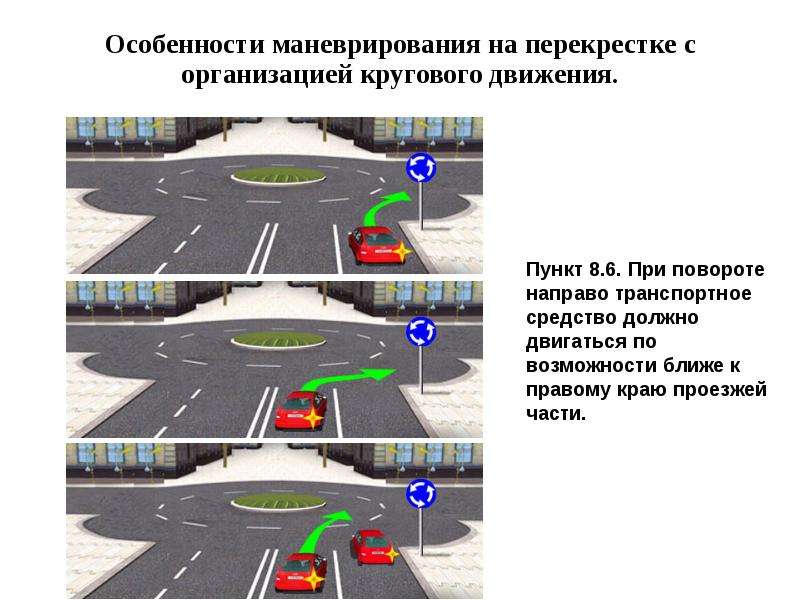
п 8.10 ПДД. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
п 8.11 ПДД. Разворот запрещается:
на пешеходных переходах;
в тоннелях;
на мостах, путепроводах, эстакадах и под ними;
на железнодорожных переездах;
в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
в местах остановок маршрутных транспортных средств.
п 8.12 ПДД. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8. 11 Правил.
11 Правил.
Комментарий к Разделу 8 Правил дорожного движения РФ
8.1.
Что такое маневр? В ПДД официального определения данному термину не дано. Маневром можно считать любое изменение направления движения ТС от прямолинейного относительно дороги, по которой оно движется.
Исходя из этого толкования, к маневрам относятся:
— поворот и разворот;
— перестроение;
— объезд и обгон;
— начало движения от края проезжей части (от тротуара) или с обочины;
— подъезд к тротуару или съезд на обочину перед остановкой;
— движение задним ходом
Не является маневром движение по закруглению дороги, когда такое закругление является единственно возможным направлением движения.
В пункте 8.1 перечислены пять случаев изменения положения ТС на проезжей части, перед выполнением которых включение «поворотника» обязательно: перед началом движения, перестроением, поворотом, разворотом и остановкой.
При осуществлении поворота в процессе движения задним ходом включение соответствующего указателя поворота также обязательно. Движение назад-вправо: включается правый «поворотник», движение назад-влево: включается левый «поворотник».
Если указатели сигналов поворота по каким-то причинам не работают (неисправны) или отсутствуют (например, на велосипеде), то сигналы подаются руками.
Маневр не должен создавать помех движению другого транспорта. Поэтому, перед началом любого маневра, важно знать ситуацию вокруг своего автомобиля, и держать ее под контролем.
8.2.
Сигналы указателями правого и левого поворота предназначены только для информирования других участников движения (водителей и пешеходов) о предстоящем маневре и НЕ дают преимущества в движении.
Сигнал поворота должен быть включен заблаговременно, т.е. заранее, но в такой момент времени, в соответствии с дорожной ситуацией, когда он не сможет ввести в заблуждение других водителей и пешеходов, по-другому, ваши намерения должны быть понятны.
Например, подъезжаете к перекрестку, на котором нужно повернуть налево, но перед перекрестком слева имеется заезд во двор (как вариант, на прилегающую территорию).
Целесообразно включить левый «поворотник» после того, как минуете въезд во двор, чтобы едущим сзади стало понятно, что поворот налево будет произведен дальше по движению, т.е. на перекрестке.
По завершении маневра сигнал поворота необходимо выключить, опять же, для того, чтобы не вводить в заблуждение остальных участников движения.
8.3.
Прилегающая территория (согласно определению) примыкает к дороге и не имеет сквозного проезда. Въезд и выезд на прилегающую территорию НЕ считается перекрестком. Поэтому, заезжая на прилегающую территорию с дороги или покидая прилегающую территорию, требуется уступить всем участникам движения, чей путь будет пересечен.
Дворы и жилые массивы также относятся к прилегающим территориям. Выезд из двора или арки жилого дома также подчиняется этому правилу.
8.4.
В этом пункте пдд сформулированы два правила перестроения:
если одно транспортное средство перестраивается, а другое движется без перестроения, то уступить дорогу должен тот, кто перестраивается;
в случае одновременного перестроения дорогу уступает тот, у кого помеха справа
Правила перестроения действуют как на дорогах с разметкой, так и на дорогах без разметки.
8.5.
Перед поворотом направо необходимо занять на проезжей части своего направления крайнее правое положение, а чтобы повернуть налево или развернуться – крайнее левое положение.
Что означает занять крайнее положение на проезжей части дороги? Крайнее правое положение, это когда справа уже разметка 1.2 (край проезжей части), бордюр, тротуар, обочина. Крайнее левое положение, это когда автомобиль располагается своим левым бортом к середине дороги (к разметке, разделяющей встречные потоки, либо к разметке, обозначающей левый край проезжей части, к разделительной полосе).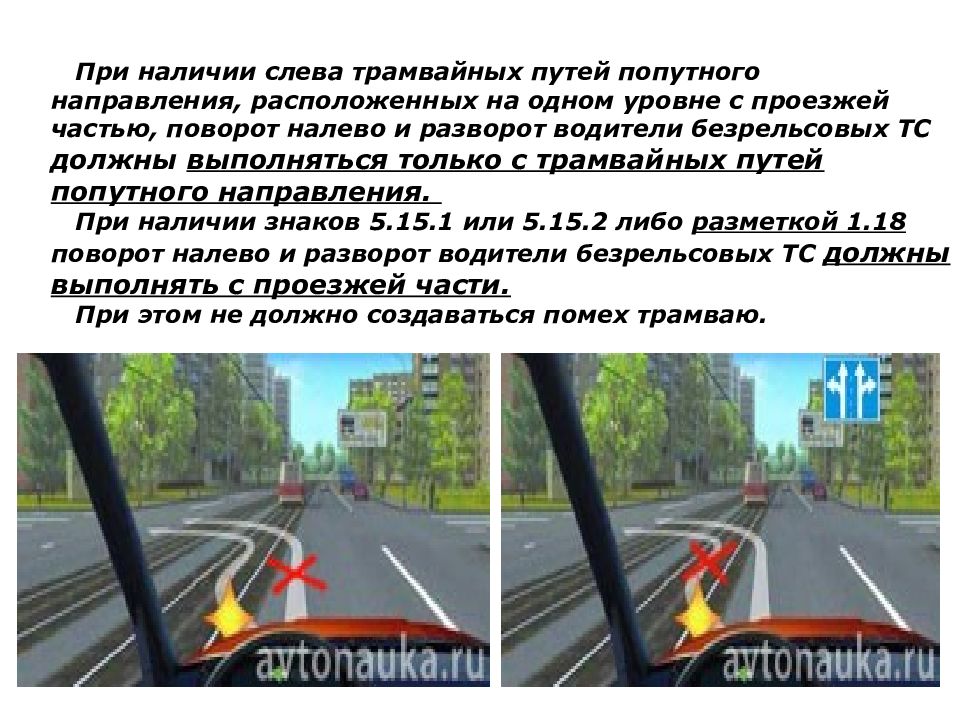
Требование занять именно крайнее положение на проезжей части дороги не случайно. Кроме машин по проезжей части имеет право передвигаться и двухколесный транспорт (мотоциклы, мопеды, велосипеды). Этим участникам не нужно много места, они могут легко протиснуться между вашим авто и краем проезжей части, и их появление может оказаться очень неожиданным.
Одним из вариантов, чтобы постараться исключить их внезапное появление и, тем самым избежать ДТП по невнимательности, является данное требование – занять крайнее положение на проезжей части дороги.
На перекресток с круговым движением заехать можно с любой полосы, но покидать такой перекресток можно только с крайнего правого ряда.
На некоторых перекрестках установлены знаки 5.15.1 или 5.15.2, информирующие о том, с каких полос и в каком направлении разрешено движение. Эту же функцию выполняет разметка 1.18. В таких случаях водители обязаны следовать их указаниям.
Если вам необходимо повернуть налево или развернуться на дороге с трамвайными путями, расположенными слева на одном уровне с проезжей частью, то необходимо, не создавая помех трамваю, перестроиться на трамвайные пути попутного направления и затем выполнить необходимый маневр. Так можно поступать, если отсутствуют знаки 5.15.1, 5.15.2 либо разметка 1.18.
Так можно поступать, если отсутствуют знаки 5.15.1, 5.15.2 либо разметка 1.18.
Если на дороге с трамвайными путями перед перекрестком установлены знаки 5.15.1, 5.15.2 либо нанесена разметка 1.18, следует поворачивать налево или разворачиваться не выезжая на трамвайные пути, предварительно уступив дорогу трамваям как попутного, так и встречного направления, движение которым разрешено одновременно с вами.
8.6.
Когда выполняется любой поворот, важно не затронуть проезжую часть встречного направления. При левом повороте такое возможно, когда «режется угол» поворота, и таким образом на выезде с пересечения проезжих частей можно левыми колесами автомобиля проехать по встречной полосе.
Поворачивая направо, ПДД требуют держаться как можно правее. На встречной полосе (той проезжей части, на которую поворачиваете) можно оказаться, если поворот направо будет «затяжной». Такое возможно на небольших перекрестках.
8.7.
Крупногабаритный транспорт (особенно длинномерный) при повороте не всегда может вписаться в выделенную полосу движения. Если ваш автомобиль находится рядом с таким ТС, будьте внимательны: его задние колеса смещаются к центру поворота. Вывод: поворачивать одновременно с таким транспортом, находясь с внутренней стороны поворота, опасно.
8.8.
Перед поворотом налево или разворотом вне перекрестка требуется пропустить весь встречный транспорт и трамвай попутного направления, т.е. уступить всем им дорогу. При выполнении этих маневров (поворот налево и разворот), пункт 8.5 требует занять крайнее левое положение на проезжей части.
Но иногда ширина проезжей части может оказаться узкой для выполнения разворота из крайнего левого положения (проще сказать, с середины дороги). В таком случае допускается развернуться от правого края проезжей части (если проезжая часть упирается в бордюр), или с правой обочины (если таковая имеется).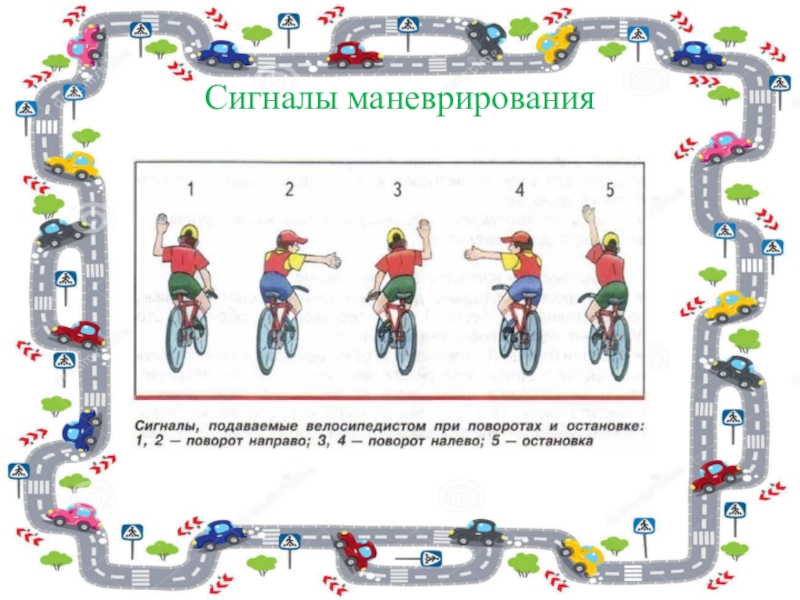 При этом варианте разворота потребуется уступить дорогу как встречному, так еще и попутному транспорту.
При этом варианте разворота потребуется уступить дорогу как встречному, так еще и попутному транспорту.
8.9.
Указанные ситуации чаще всего встречаются во дворах, на стоянках, полянах, автозаправках, прилегающих территориях и т.п. В таких случаях уступает дорогу тот, у кого помеха справа.
8.10.
В целях поддержания скоростного режима и пропускной способности дорог, их оборудуют дополнительными полосами – разгона и торможения, которые отделяются от основной дороги горизонтальной разметкой 1.8.
Для того чтобы съехать с такой дороги, сначала нужно перестроиться на полосу торможения, и уже на ней снижать скорость.
Заезжая на дорогу с полосой разгона, сначала нужно двигаться по ней, чтобы набрать скорость, затем, уступив дорогу попутному транспорту, перестроиться на соседнюю полосу (на основную дорогу).
8.11.
Разворот запрещается:
— на пешеходных переходах;
— в тоннелях;
— на мостах, путепроводах, эстакадах и под ними;
— на железнодорожных переездах;
— в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
— в местах остановок маршрутных транспортных средств
Кроме указанных в пункте 8. 11 мест, разворот еще может быть запрещен дорожными знаками и дорожной разметкой. В некоторых случаях еще нужно обращать внимание на сигналы светофоров (чаще с дополнительными секциями). На линзах могут быть нанесены стрелки, запрещающие разворот. Это стрелки «прямо», «прямо и направо».
11 мест, разворот еще может быть запрещен дорожными знаками и дорожной разметкой. В некоторых случаях еще нужно обращать внимание на сигналы светофоров (чаще с дополнительными секциями). На линзах могут быть нанесены стрелки, запрещающие разворот. Это стрелки «прямо», «прямо и направо».
8.12.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Кроме того, движение задним ходом запрещается на автомагистралях (обозначаются знаком 5.1) и на дорогах для автомобилей (обозначаются знаком 5.3)
Начало движения маневрирование пдд 2020
ПДД 2020 | Начало движения, маневрирование
ПДД 2019, 2020 с комментариями онлайн
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны – рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Что такое маневр? В ПДД официального определения данному термину не дано. Маневром можно считать любое изменение направления движения ТС от прямолинейного относительно дороги, по которой оно движется.
Исходя из этого толкования, к маневрам относятся:
- поворот и разворот;
- перестроение;
- объезд и обгон;
- начало движения от края проезжей части (от тротуара) или с обочины;
- подъезд к тротуару или съезд на обочину перед остановкой;
- движение задним ходом.


Не является маневром движение по закруглению дороги, когда такое закругление является единственно возможным направлением движения.
В пункте 8.1 перечислены пять случаев изменения положения ТС на проезжей части, перед выполнением которых включение «поворотника» обязательно: перед началом движения, перестроением, поворотом, разворотом и остановкой.
При осуществлении поворота в процессе движения задним ходом включение соответствующего указателя поворота также обязательно. Движение назад-вправо: включается правый «поворотник», движение назад-влево: включается левый «поворотник».
Если указатели сигналов поворота по каким-то причинам не работают (неисправны) или отсутствуют (например, на велосипеде), то сигналы подаются руками.
Маневр не должен создавать помех движению другого транспорта. Поэтому, перед началом любого маневра, важно знать ситуацию вокруг своего автомобиля, и держать ее под контролем.
Что касается действий перед началом движения в различных ситуациях, об этом можно прочесть в одноименной статье Начало движения на автомобиле.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
Сигналы указателями правого и левого поворота предназначены только для информирования других участников движения (водителей и пешеходов) о предстоящем маневре и НЕ дают преимущества в движении.
Сигнал поворота должен быть включен заблаговременно, т.е. заранее, но в такой момент времени, в соответствии с дорожной ситуацией, когда он не сможет ввести в заблуждение других водителей и пешеходов, по-другому, ваши намерения должны быть понятны.
Например, подъезжаете к перекрестку, на котором нужно повернуть налево, но перед перекрестком слева имеется заезд во двор (как вариант, на прилегающую территорию). Целесообразно включить левый «поворотник» после того, как минуете въезд во двор, чтобы едущим сзади стало понятно, что поворот налево будет произведен дальше по движению, т.е. на перекрестке.
По завершении маневра сигнал поворота необходимо выключить, опять же, для того, чтобы не вводить в заблуждение остальных участников движения.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
Прилегающая территория (согласно определению) примыкает к дороге и не имеет сквозного проезда. Въезд и выезд на прилегающую территорию НЕ считается перекрестком. Поэтому, заезжая на прилегающую территорию с дороги или покидая прилегающую территорию, требуется уступить всем участникам движения, чей путь будет пересечен.
Дворы и жилые массивы также относятся к прилегающим территориям. Выезд из двора или арки жилого дома также подчиняется этому правилу. Подробнее — в одноименной статье Выезд с прилегающей территории.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
В этом пункте пдд сформулированы два правила перестроения:
- если одно транспортное средство перестраивается, а другое движется без перестроения, то уступить дорогу должен тот, кто перестраивается;
- в случае одновременного перестроения дорогу уступает тот, у кого помеха справа.
Правила перестроения действуют как на дорогах с разметкой, так и на дорогах без разметки. В статьях Перестроение в потокеи Перестроение на дороге.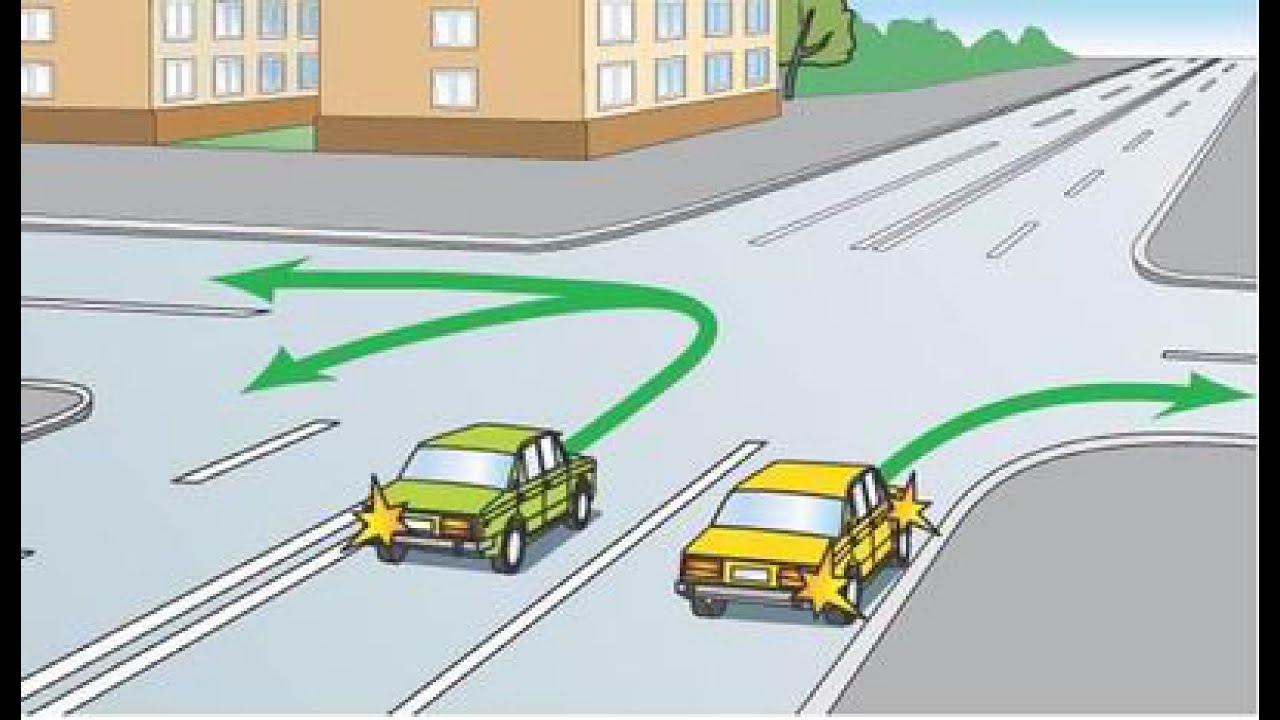 Безопасность маневра вопросы приоритета, а также техника перестроения рассмотрены более подробно.
Безопасность маневра вопросы приоритета, а также техника перестроения рассмотрены более подробно.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
Перед поворотом направо необходимо занять на проезжей части своего направления крайнее правое положение, а чтобы повернуть налево или развернуться – крайнее левое положение.
Что означает занять крайнее положение на проезжей части дороги? Крайнее правое положение, это когда справа уже разметка 1.2 (край проезжей части), бордюр, тротуар, обочина. Крайнее левое положение, это когда автомобиль располагается своим левым бортом к середине дороги (к разметке, разделяющей встречные потоки, либо к разметке, обозначающей левый край проезжей части, к разделительной полосе).
Требование занять именно крайнее положение на проезжей части дороги не случайно. Кроме машин по проезжей части имеет право передвигаться и двухколесный транспорт (мотоциклы, мопеды, велосипеды). Этим участникам не нужно много места, они могут легко протиснуться между вашим авто и краем проезжей части, и их появление может оказаться очень неожиданным.
Одним из вариантов, чтобы постараться исключить их внезапное появление и, тем самым избежать ДТП по невнимательности, является данное требование – занять крайнее положение на проезжей части дороги.
На перекресток с круговым движением заехать можно с любой полосы, но покидать такой перекресток можно только с крайнего правого ряда. Подробнее о въезде и выезде с таких перекрестков – в статье Проезд перекрестков с круговым движением.
На некоторых перекрестках установлены знаки 5.15.1 или 5.15.2, информирующие о том, с каких полос и в каком направлении разрешено движение.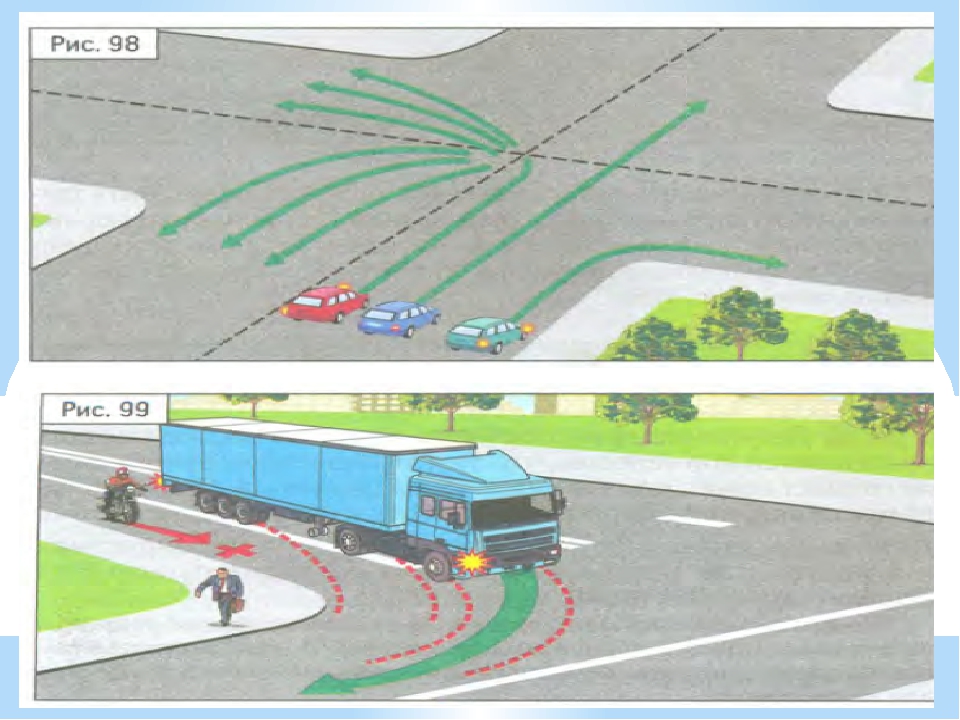 Эту же функцию выполняет разметка 1.18. В таких случаях водители обязаны следовать их указаниям.
Эту же функцию выполняет разметка 1.18. В таких случаях водители обязаны следовать их указаниям.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
Если вам необходимо повернуть налево или развернуться на дороге с трамвайными путями, расположенными слева на одном уровне с проезжей частью, то необходимо, не создавая помех трамваю, перестроиться на трамвайные пути попутного направления и затем выполнить необходимый маневр. Так можно поступать, если отсутствуют знаки 5.15.1, 5.15.2 либо разметка 1.18.
Если на дороге с трамвайными путями перед перекрестком установлены знаки 5.15.1, 5.15.2 либо нанесена разметка 1.18, следует поворачивать налево или разворачиваться не выезжая на трамвайные пути, предварительно уступив дорогу трамваям как попутного, так и встречного направления, движение которым разрешено одновременно с вами.
В статье Проезд перекрестков с трамвайными путями эти правила рассмотрены более подробно.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
Когда выполняется любой поворот, важно не затронуть проезжую часть встречного направления. При левом повороте такое возможно, когда «режется угол» поворота, и таким образом на выезде с пересечения проезжих частей можно левыми колесами автомобиля проехать по встречной полосе.
Поворачивая направо, ПДД требуют держаться как можно правее. На встречной полосе (той проезжей части, на которую поворачиваете) можно оказаться, если поворот направо будет «затяжной». Такое возможно на небольших перекрестках.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8. 5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
Крупногабаритный транспорт (особенно длинномерный) при повороте не всегда может вписаться в выделенную полосу движения. Если ваш автомобиль находится рядом с таким ТС, будьте внимательны: его задние колеса смещаются к центру поворота. Вывод: поворачивать одновременно с таким транспортом, находясь с внутренней стороны поворота, опасно.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
Перед поворотом налево или разворотом вне перекрестка требуется пропустить весь встречный транспорт и трамвай попутного направления, т.е. уступить всем им дорогу. При выполнении этих маневров (поворот налево и разворот), пункт 8.5 требует занять крайнее левое положение на проезжей части.
Но иногда ширина проезжей части может оказаться узкой для выполнения разворота из крайнего левого положения (проще сказать, с середины дороги). В таком случае допускается развернуться от правого края проезжей части (если проезжая часть упирается в бордюр), или с правой обочины (если таковая имеется). При этом варианте разворота потребуется уступить дорогу как встречному, так еще и попутному транспорту.
Подробнее о разворотах вне перекрестка можно прочесть в статьях Выполнение разворота. Часть 1 и Разворот на дороге вне перекрестка через обочину.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
Указанные ситуации чаще всего встречаются во дворах, на стоянках, полянах, автозаправках, прилегающих территориях и т.п. В таких случаях уступает дорогу тот, у кого помеха справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
В целях поддержания скоростного режима и пропускной способности дорог, их оборудуют дополнительными полосами – разгона и торможения, которые отделяются от основной дороги горизонтальной разметкой 1.8.
Для того чтобы съехать с такой дороги, сначала нужно перестроиться на полосу торможения, и уже на ней снижать скорость.
Заезжая на дорогу с полосой разгона, сначала нужно двигаться по ней, чтобы набрать скорость, затем, уступив дорогу попутному транспорту, перестроиться на соседнюю полосу (на основную дорогу).
Более подробно о полосе для разгона и торможения — в одноименной статье Полоса разгона и полоса торможения.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
Кроме указанных в пункте 8.11 мест, разворот еще может быть запрещен дорожными знаками и дорожной разметкой. В некоторых случаях еще нужно обращать внимание на сигналы светофоров (чаще с дополнительными секциями). На линзах могут быть нанесены стрелки, запрещающие разворот. Это стрелки «прямо», «прямо и направо».
О том, как безопасно выполнить разворот рассмотрено в одноименных статьях: Выполнение разворота Часть 1 и Часть 2 и в серии статей Разворот.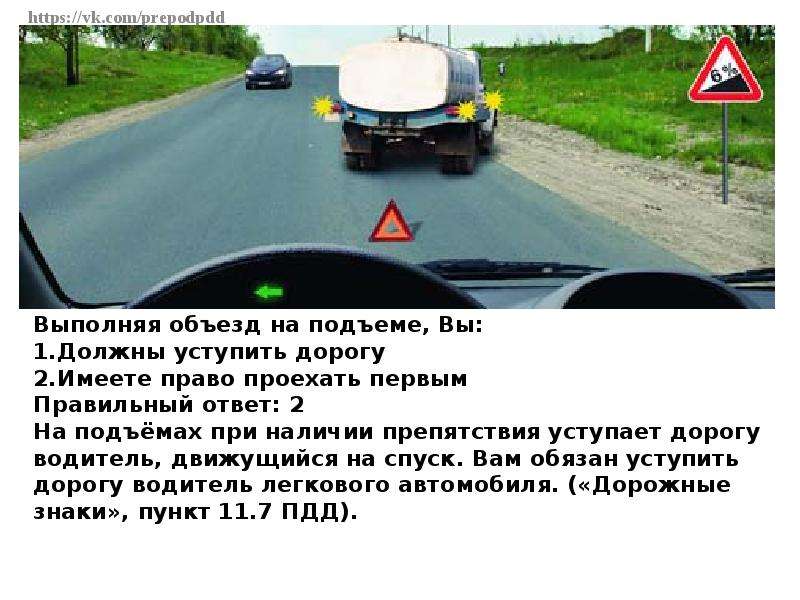
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Кроме того, движение задним ходом запрещается на автомагистралях (обозначаются знаком 5.1) и на дорогах для автомобилей (обозначаются знаком 5.3)
Начало движения, маневрирование на дорогах
Пункт 8 ПДД включается в теоретическую часть экзамена в автошколе и регламентирует начало движения, маневрирование на перекрестках.
Пункт 8.1 ПДД Перед тем, как начинать движение, разворот, поворот или перестроение, а также остановку, водитель обязан подавать сигналы световыми указателями поворота, рукой остальным участникам движения.
В случае неисправности или отсутствия световых указателей сделать предупреждение с помощью руки. Последнее применимо для водителей мотоциклов и мопедов. Маневр не должен становиться помехой или источником опасности для движения других ТС, пешеходов или велосипедистов.
Последнее применимо для водителей мотоциклов и мопедов. Маневр не должен становиться помехой или источником опасности для движения других ТС, пешеходов или велосипедистов.
Сигналы маневрирования подаваемые рукой
1, Поворот налево или разворот — вытягивается в сторону левая рука, или же правая также вытягивается в сторону и сгибается в локте вверх под прямым углом
2. Вытягивается в сторону левая рука и сгибается в локте вверх под прямым углом или же правая вытягивается в сторону — такой сигнал рукой подаваемый мотоциклистом информирует вас что он собирается повернуть направо.
3. Поднятая вверх одна из рук — такой сигнал рукой подаваемый водителем легкового автомобиля информирует вас о торможении.
Пункт 8.2 ПДД Когда нужно включать поворотники? Правила обязывают водителя подавать поворотный сигнал с помощью руки или указателей до того момента, как будет произведен маневр.
- При успешном маневре подача сигнала должна немедленно прекратиться во избежание недоразумений.
- Также запрещается вводить других участников движения в заблуждение подачей знаков.
- Сигнал маневра не дает водителю никаких преимуществ на дороге и не освобождает от соблюдения мер минимальной предосторожности.
Пункт 8.3 ПДД При выезде с прилегающей территории (парковка или стоянка внутри двора), водитель ТС обязан уступать дорогу всем участникам движения, движущимся по данному участку дороги, будь то водители или пешеходы.
Выезжая с дорожной полосы, уступать дорогу тем транспорту и пешеходам, чье направление движения вам необходимо пересечь.
Пункт 8.4 ПДД РФ Правила перестроения. Во время перестроения автовладелец обязан уступать дорогу всем ТС, которые движутся в том же направлении и не собираются его менять.
Если перестроение осуществляется несколькими ТС одновременно (взаимное перестроение) — водитель (находящийся слева) должен уступить дорогу водителю который находится по правую его руку.![]()
Пункт 8.5 ПДД РФ Перед тем, как осуществлять повороты в любую сторону или разворот, водителю следует заранее перестроить свое ТС на крайнюю полосу в сторону движения.
Перестроение ПДД 8.5 Перестроение на крайнюю полосу движения
Круговое движение
Исключение — ситуация, при которой необходимо въезжать на перекресток с организацией кругового движения. В данном случае:
- Въезд на дорогу с круговым движением осуществляется с любой полосы;
- Выезд с участка дороги с кольцевым движением производится только с крайней правой полосы.
Маневрирование на дороге с трамвайными путями
Если по левой стороне имеются трамвайные пути, по которым осуществляется попутное направление, и они находятся на одном уровне с основной дорогой, то разворот и поворот налево выполняются с них.
Ограничение на данный маневр вводится знаками 5.15.1 или 5.15.2, а также с помощью разметки 1.18. Естественно, помех трамваю создаваться не должно.
Знаки предписывающие направление движения на проезжей частиПункт 8.6 ПДД При осуществлении поворота необходимо сделать так, чтобы ТС не оказалось на встречной полосе после маневрирования на перекрестках. Если же происходит поворот направо, то движение должно осуществляться как можно ближе к правой стороне дороги.
Правильное маневрирование Неправильное маневрирование Правила маневрирования габаритных транспортных средств.Пункт 8.7 ПДД Когда габариты ТС не позволяет осуществлять разворот по правилу 8.5, согласно ПДД, таким транспортным средствам разрешается отходить от данного правила и совершать такой поворот, разворот, но обеспечивая безопасность остальных участников движения.
Пункт 8.8 ПДД Если осуществляется разворот или поворот налево вне перекрестка, то водитель автомобиля должен предоставить дорогу тем ТС, которые движутся навстречу, а также попутному трамваю.
В случае, когда ширины дороги не хватает для того, чтобы осуществить маневр по правилам (из левого крайнего положения), можно проводить его с правой обочины или по-другому от правого края дорожной полосы. Водителю при этом требуется уступить проезд как встречным участникам движения, так и попутным. Данное правило применимо, например, к крупногабаритным грузовым машинам.
Пункт 8.9 ПДД Если получается так, что пересекаются траектории движения различных ТС при том, что ПДД не предписывают определенной очередности, освободить трассу должен тот водитель, по отношению к которому приближающееся ТС находится по правую руку (принцип ПДД «Помеха справа»).
Пункт 8.10 ПДД Когда имеется полоса торможения, тот водитель, который хочет осуществить поворот, обязан заблаговременно перестроиться на указанную полосу и именно на ней снижать скорость движения.
Если же при въезде на дорогу имеется разгоночная полоса, то водителю следует передвигаться по ней, а также своевременно перестраиваться на расположенную рядом полосу. Дорога уступается тем ТС, которые движутся по данной дороге.
Пункт 8.11 ПДД Разворот запрещается осуществлять в следующих случаях:
- в тоннелях;
- в зонах, на которых видимость дороги меньше, чем 100 метров хотя бы в одном направлении движения;
- на ж/д переездах;
- на эстакадах, мостах, путепроводах, а также под указанными объектами;
- в зоне остановки маршрутных ТС;
- на территории пешеходных переходов.
Пункт 8.12 ПДД Движение транспортных средств задним ходом разрешается в том случае, когда маневр не принесет опасности прочим участникам движения и не создаст для них помех. В случае необходимости водителю следует попросить помощи у иных лиц.
Движение транспортных средств задним ходом запрещается, где пункт 8. 11 ПДД запрещает проводить разворот.
11 ПДД запрещает проводить разворот.
Нарушение данных правил карается штрафами по соответствующим статьям КоАП. Например, за неправильное маневрирование на парковках. В частности, если перемещение задним ходом создало помехи для остальных участников движения.
Что касается нюансов маневрирования, то примером может стать аварийная остановка. Ее необходимо осуществить на правой обочине, при этом включить аварийные сигнальные огни и выставить знак аварийной остановки, особенно если видимость не дает возможности иным участникам движения издали увидеть ТС.
Видео урок: начало движения маневрирование ПДД
Начало движения, маневрирование ПДД 2020
- ПДД 2020
- Начало движения, маневрирование
в редакции от 2 января 2020 года
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой.
 При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.

При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.

8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
на пешеходных переходах;
в тоннелях;
на мостах, путепроводах, эстакадах и под ними;
на железнодорожных переездах;
в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.

Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения, маневрирование — Тема ПДД 2020
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65
ПДД РФ 2020 — 8. Начало движения, маневрирование
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги – пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.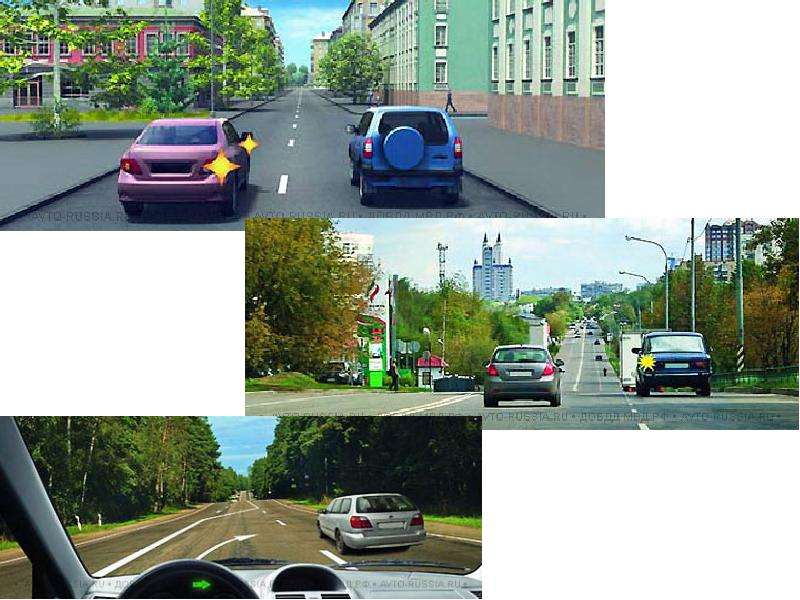 5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами дорожного движения, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах расположения остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения, маневрирование | ПДД Билеты 2020
8. 1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги – пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5. 15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами дорожного движения, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах расположения остановок маршрутных транспортных средств.

8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
8. Начало движения, маневрирование — ПДД РФ 2020
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх.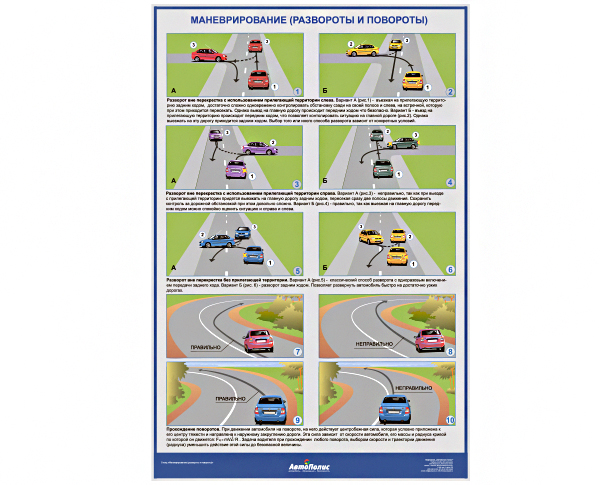 Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.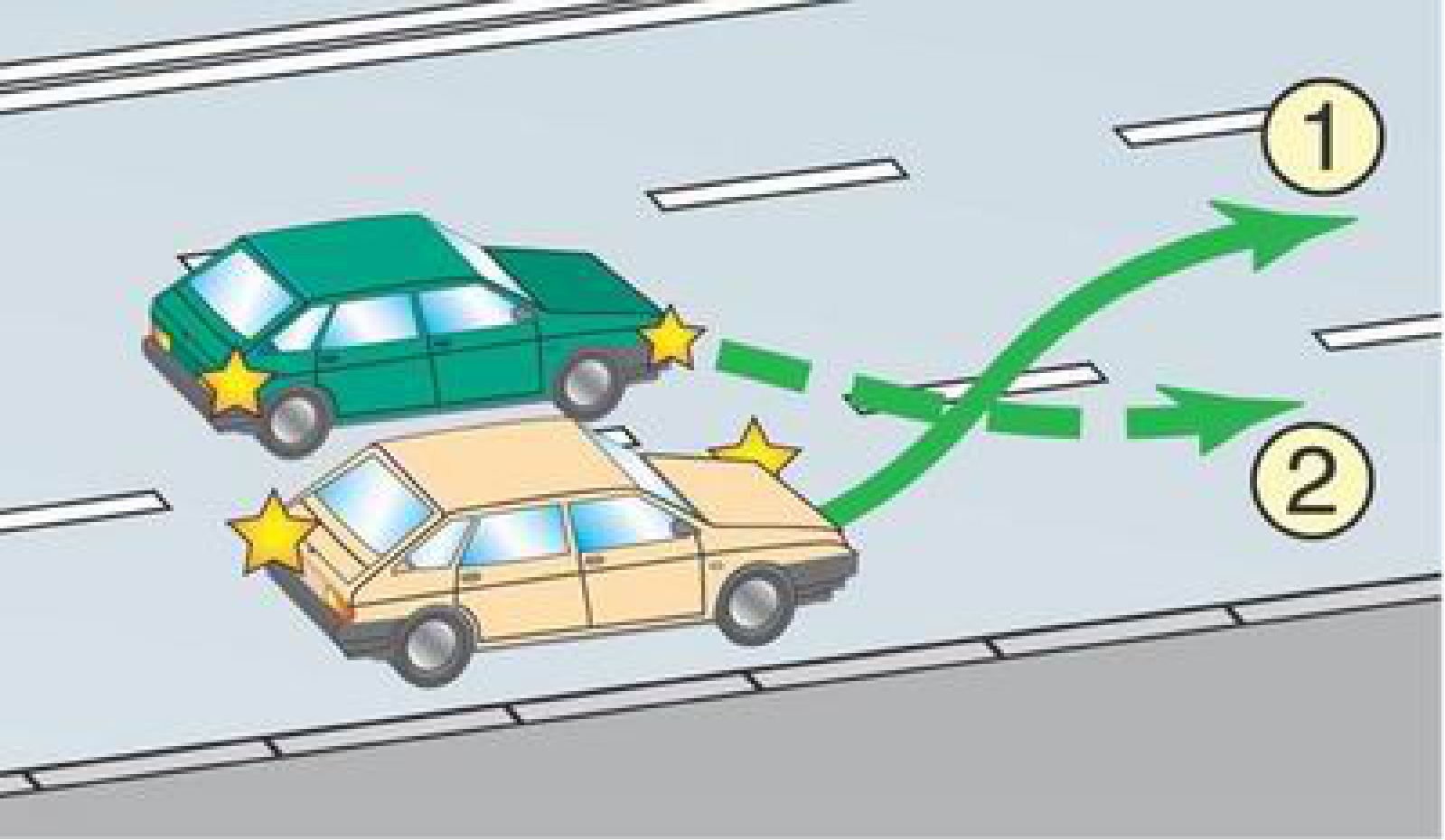
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта п. 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.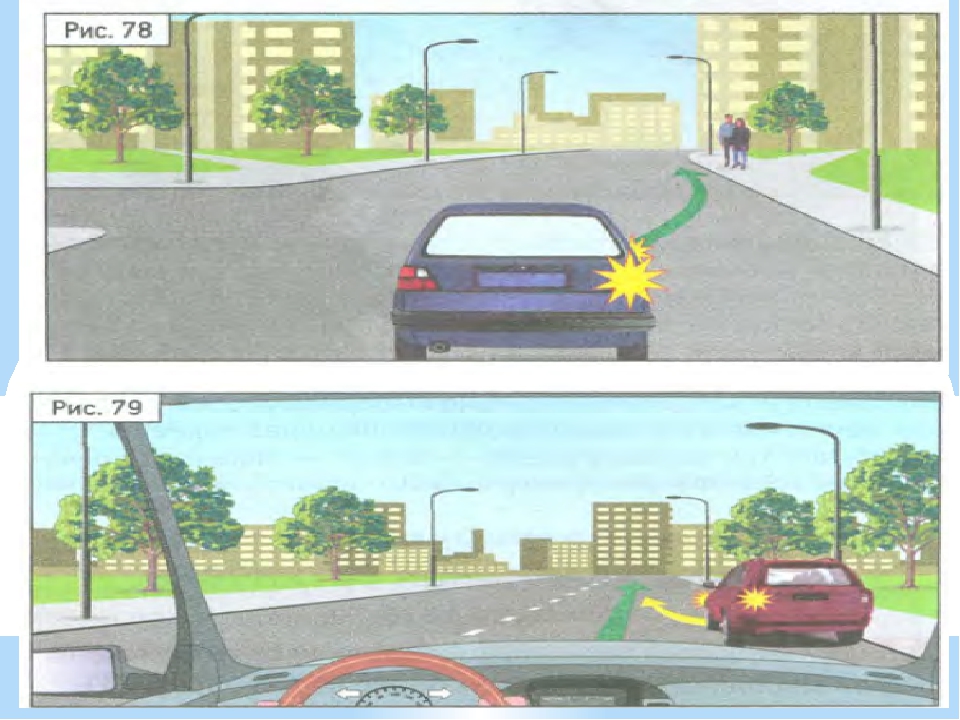
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
на пешеходных переходах;
в тоннелях;
на мостах, путепроводах, эстакадах и под ними;
на железнодорожных переездах;
в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту п. 8.11 Правил.
Начало движения, маневрирование (ПДД 2020) ? znaypravila.ru
- Редакция от 24.11.2018
- Утверждены 23.10.1993
 03.2020″>Актуально на 28.03.2020
03.2020″>Актуально на 28.03.20208.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения.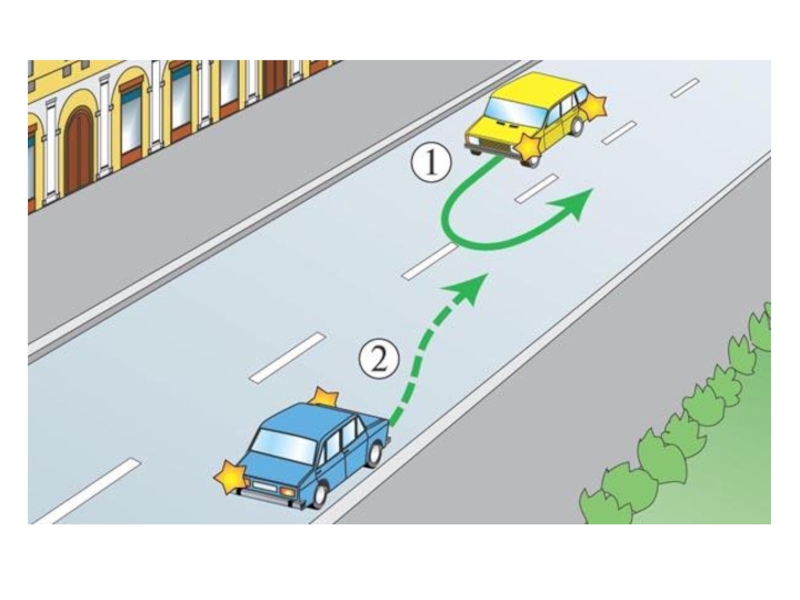 При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
Знаки 5.15.1 — 5.15.2 и разметка 1.88.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.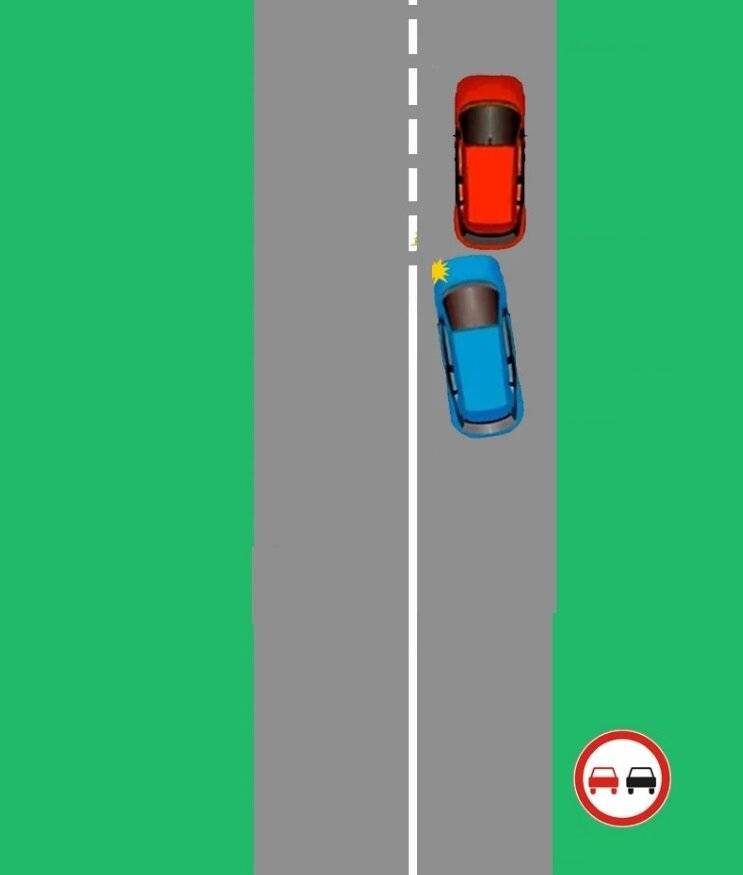
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.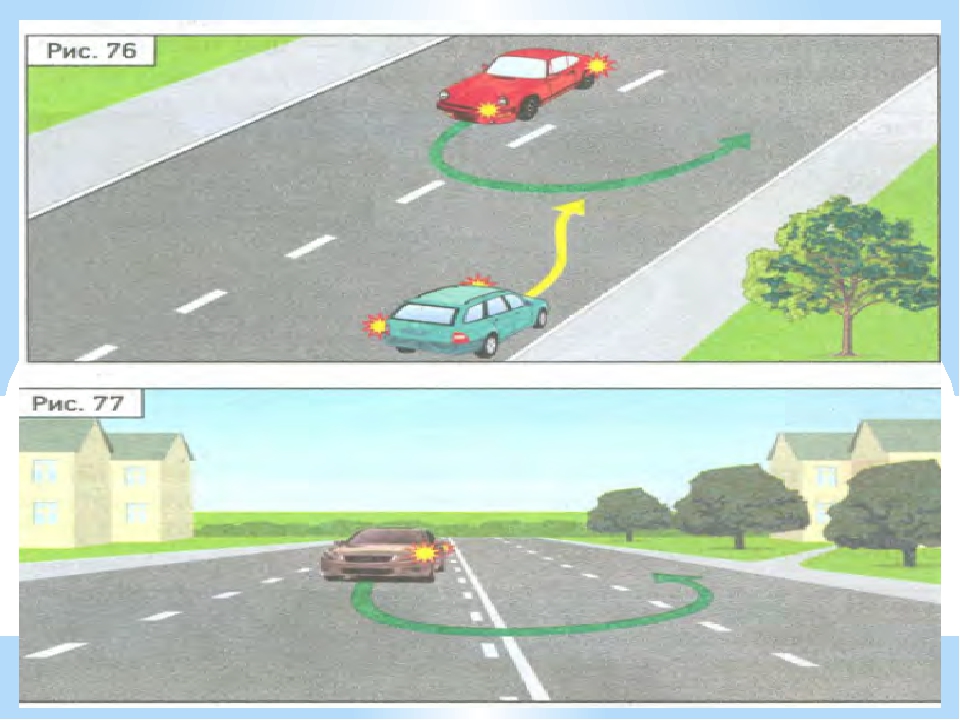
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.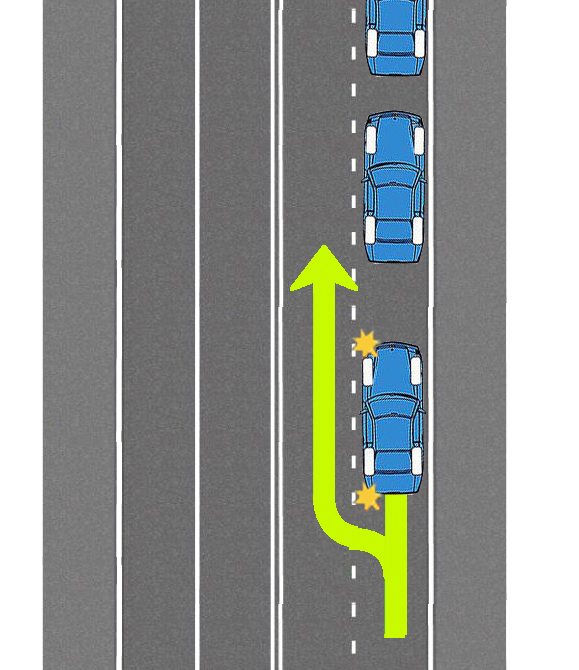 11 Правил.
11 Правил.
Начало движения, маневрирование ПДД 2019
- Билеты ПДД 2019
- ПДД 2019
- Начало движения, маневрирование
в редакции от 21 декабря 2018
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра).
 При этом сигнал не должен вводить в заблуждение других участников движения.
При этом сигнал не должен вводить в заблуждение других участников движения.Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.

При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.

Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
на пешеходных переходах;
в тоннелях;
на мостах, путепроводах, эстакадах и под ними;
на железнодорожных переездах;
в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
в местах остановок маршрутных транспортных средств.

8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
ПДД 2018 — раздел №8 — Начало движения, маневрирование — Рамблер/авто
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.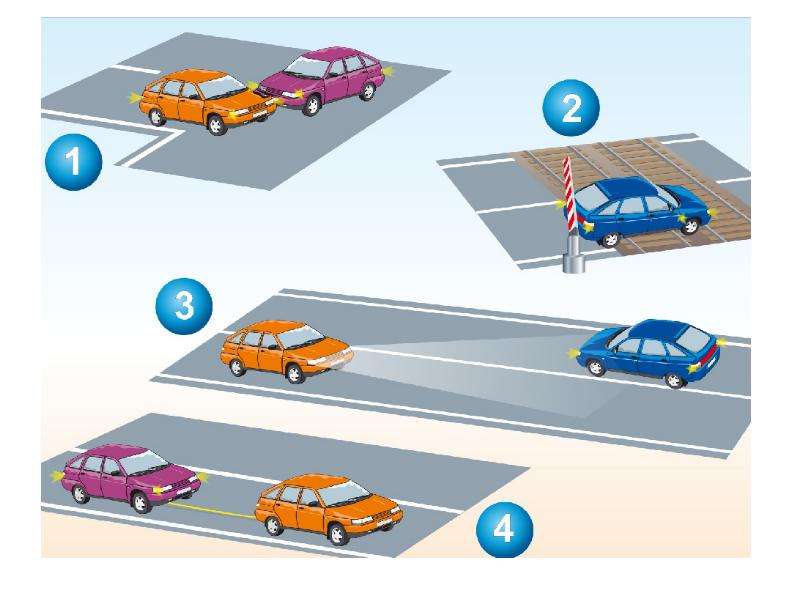
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8. 5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
— на пешеходных переходах;
— в тоннелях;
— на мостах, путепроводах, эстакадах и под ними;
— на железнодорожных переездах;
— в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
— в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
ПДД 2018 — раздел №7 — Применение аварийной сигнализации и знака аварийной остановки ПДД 2018 — раздел №9 — Расположение транспортных средств на проезжей частиВидео дня. В столичных автомойках проводят санитарную обработку машин
В столичных автомойках проводят санитарную обработку машин
Начало движения, маневрирование на дорогах
Глава 8 ПДД. Начало движения, маневрирование
Пункт 8 ПДД включается в теоретическую часть экзамена в автошколе и регламентирует начало движения, маневрирование на перекрестках.
Пункт 8.1 ПДД Перед тем, как начинать движение, разворот, поворот или перестроение, а также остановку, водитель обязан подавать сигналы световыми указателями поворота, рукой остальным участникам движения.
В случае неисправности или отсутствия световых указателей сделать предупреждение с помощью руки. Последнее применимо для водителей мотоциклов и мопедов. Маневр не должен становиться помехой или источником опасности для движения других ТС, пешеходов или велосипедистов.
Сигналы маневрирования подаваемые рукой
1, Поворот налево или разворот — вытягивается в сторону левая рука, или же правая также вытягивается в сторону и сгибается в локте вверх под прямым углом
2.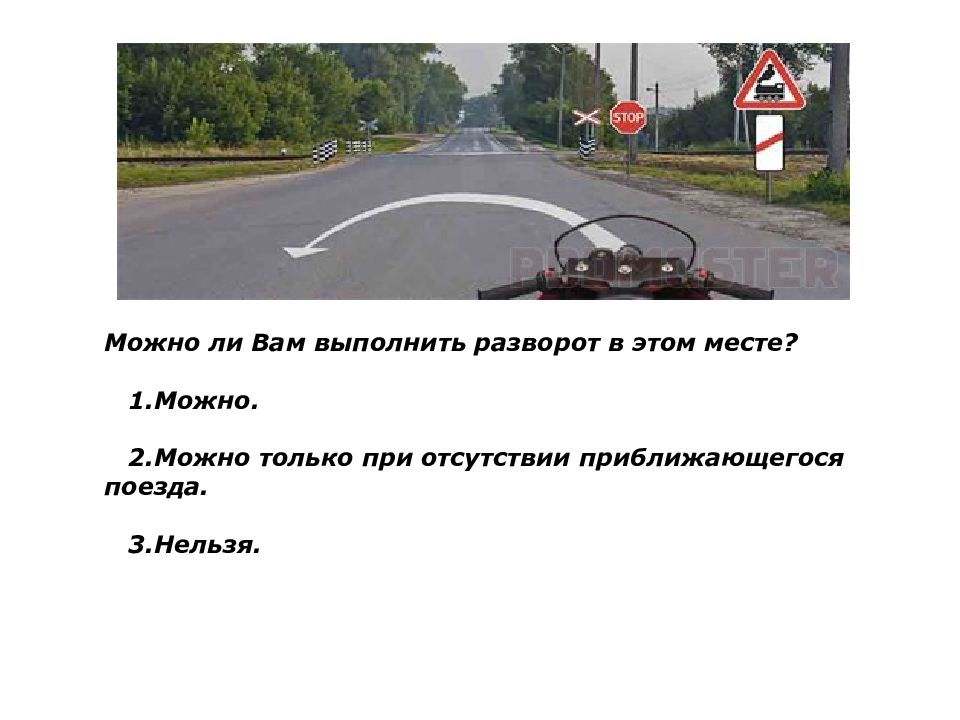 Вытягивается в сторону левая рука и сгибается в локте вверх под прямым углом или же правая вытягивается в сторону — такой сигнал рукой подаваемый мотоциклистом информирует вас что он собирается повернуть направо.
Вытягивается в сторону левая рука и сгибается в локте вверх под прямым углом или же правая вытягивается в сторону — такой сигнал рукой подаваемый мотоциклистом информирует вас что он собирается повернуть направо.
3. Поднятая вверх одна из рук — такой сигнал рукой подаваемый водителем легкового автомобиля информирует вас о торможении.
Пункт 8.2 ПДД Когда нужно включать поворотники? Правила обязывают водителя подавать поворотный сигнал с помощью руки или указателей до того момента, как будет произведен маневр.
- При успешном маневре подача сигнала должна немедленно прекратиться во избежание недоразумений.
- Также запрещается вводить других участников движения в заблуждение подачей знаков.
- Сигнал маневра не дает водителю никаких преимуществ на дороге и не освобождает от соблюдения мер минимальной предосторожности.
Пункт 8.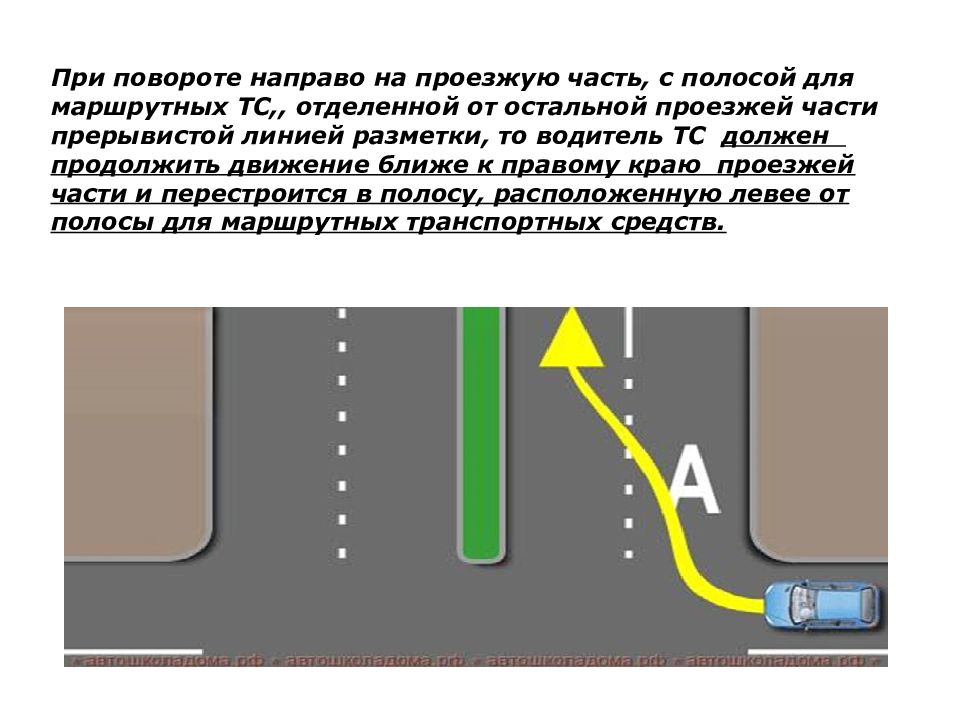 3 ПДД При выезде с прилегающей территории (парковка или стоянка внутри двора), водитель ТС обязан уступать дорогу всем участникам движения, движущимся по данному участку дороги, будь то водители или пешеходы.
3 ПДД При выезде с прилегающей территории (парковка или стоянка внутри двора), водитель ТС обязан уступать дорогу всем участникам движения, движущимся по данному участку дороги, будь то водители или пешеходы.
Выезжая с дорожной полосы, уступать дорогу тем транспорту и пешеходам, чье направление движения вам необходимо пересечь.
Пункт 8.4 ПДД РФ Правила перестроения. Во время перестроения автовладелец обязан уступать дорогу всем ТС, которые движутся в том же направлении и не собираются его менять.
Если перестроение осуществляется несколькими ТС одновременно (взаимное перестроение) — водитель (находящийся слева) должен уступить дорогу водителю который находится по правую его руку.
Пункт 8.5 ПДД РФ Перед тем, как осуществлять повороты в любую сторону или разворот, водителю следует заранее перестроить свое ТС на крайнюю полосу в сторону движения.
Перестроение ПДД 8.5 Перестроение на крайнюю полосу движения
Круговое движение
Исключение — ситуация, при которой необходимо въезжать на перекресток с организацией кругового движения. В данном случае:
В данном случае:
- Въезд на дорогу с круговым движением осуществляется с любой полосы;
- Выезд с участка дороги с кольцевым движением производится только с крайней правой полосы.
ПДД 8.5 Выезд на участок дороги с круговым движением и выезд с него
Маневрирование на дороге с трамвайными путями
Если по левой стороне имеются трамвайные пути, по которым осуществляется попутное направление, и они находятся на одном уровне с основной дорогой, то разворот и поворот налево выполняются с них.
Ограничение на данный маневр вводится знаками 5.15.1 или 5.15.2, а также с помощью разметки 1.18. Естественно, помех трамваю создаваться не должно.
Знаки предписывающие направление движения на проезжей части
Пункт 8.6 ПДД При осуществлении поворота необходимо сделать так, чтобы ТС не оказалось на встречной полосе после маневрирования на перекрестках. Если же происходит поворот направо, то движение должно осуществляться как можно ближе к правой стороне дороги.
Пункт 8.7 ПДД Когда габариты ТС не позволяет осуществлять разворот по правилу 8.5, согласно ПДД, таким транспортным средствам разрешается отходить от данного правила и совершать такой поворот, разворот, но обеспечивая безопасность остальных участников движения.
Пункт 8.8 ПДД Если осуществляется разворот или поворот налево вне перекрестка, то водитель автомобиля должен предоставить дорогу тем ТС, которые движутся навстречу, а также попутному трамваю.
В случае, когда ширины дороги не хватает для того, чтобы осуществить маневр по правилам (из левого крайнего положения), можно проводить его с правой обочины или по-другому от правого края дорожной полосы. Водителю при этом требуется уступить проезд как встречным участникам движения, так и попутным. Данное правило применимо, например, к крупногабаритным грузовым машинам.
Пункт 8.9 ПДД Если получается так, что пересекаются траектории движения различных ТС при том, что ПДД не предписывают определенной очередности, освободить трассу должен тот водитель, по отношению к которому приближающееся ТС находится по правую руку (принцип ПДД «Помеха справа»).
Пункт 8.10 ПДД Когда имеется полоса торможения, тот водитель, который хочет осуществить поворот, обязан заблаговременно перестроиться на указанную полосу и именно на ней снижать скорость движения.
Если же при въезде на дорогу имеется разгоночная полоса, то водителю следует передвигаться по ней, а также своевременно перестраиваться на расположенную рядом полосу. Дорога уступается тем ТС, которые движутся по данной дороге.
Пункт 8.11 ПДД Разворот запрещается осуществлять в следующих случаях:
- в тоннелях;
- в зонах, на которых видимость дороги меньше, чем 100 метров хотя бы в одном направлении движения;
- на ж/д переездах;
- на эстакадах, мостах, путепроводах, а также под указанными объектами;
- в зоне остановки маршрутных ТС;
- на территории пешеходных переходов.
Пункт 8.12 ПДД Движение транспортных средств задним ходом разрешается в том случае, когда маневр не принесет опасности прочим участникам движения и не создаст для них помех. В случае необходимости водителю следует попросить помощи у иных лиц.
В случае необходимости водителю следует попросить помощи у иных лиц.
Движение транспортных средств задним ходом запрещается, где пункт 8.11 ПДД запрещает проводить разворот.
Нарушение данных правил карается штрафами по соответствующим статьям КоАП. Например, за неправильное маневрирование на парковках. В частности, если перемещение задним ходом создало помехи для остальных участников движения.
Что касается нюансов маневрирования, то примером может стать аварийная остановка. Ее необходимо осуществить на правой обочине, при этом включить аварийные сигнальные огни и выставить знак аварийной остановки, особенно если видимость не дает возможности иным участникам движения издали увидеть ТС.
Видео урок: начало движения маневрирование ПДД
8. Начало движения, маневрирование
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
на пешеходных переходах;
на мостах, путепроводах, эстакадах и под ними;
на железнодорожных переездах;
в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
в местах остановок маршрутных транспортных средств.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Билеты ПДД 2019 онлайн
На этом сайте вы сможете подготовиться к экзамену в ГИБДД (ГАИ) по новым правилам 2019 года. Здесь есть все необходимое для успешной сдачи экзамена. Все 40 официальных экзаменационных билетов ПДД РФ на категории АБМ (ABM) и СД (CD) с последними изменениями от 14 декабря 2018 года. Билеты полностью актуальны на декабрь 2019 года и полностью соответствуют билетам ГИБДД. Билеты содержат комментарии с изображениями дорожных знаков и разметки и ссылок на актуальные пункты правил дорожного движения с последними изменениями на 2019 год.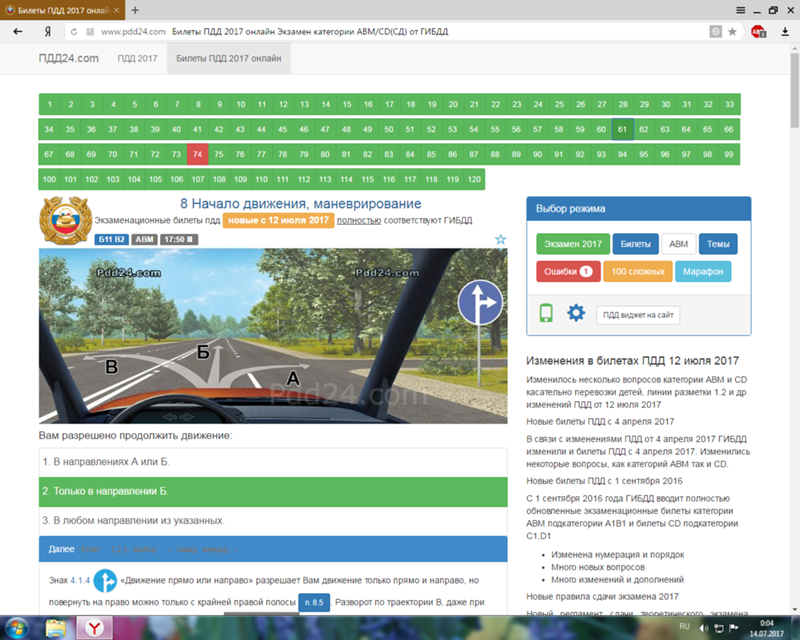 Режим онлайн экзамена полностью идентичен экзамену в ГИБДД. С дополнительными вопросами и ограничением времени прохождения. С возможностью прорешивать билеты по темам. Более 30 тем по всем разделам Правил Дорожного Движения. Полная версия актуальных Правил Дорожного Движения (ПДД). Мобильная версия приложения для вашего телефона. Скачайте Билеты ПДД для iOS, если у вас iPhone или iPad. Скачайте Билеты ПДД для Android.
Режим онлайн экзамена полностью идентичен экзамену в ГИБДД. С дополнительными вопросами и ограничением времени прохождения. С возможностью прорешивать билеты по темам. Более 30 тем по всем разделам Правил Дорожного Движения. Полная версия актуальных Правил Дорожного Движения (ПДД). Мобильная версия приложения для вашего телефона. Скачайте Билеты ПДД для iOS, если у вас iPhone или iPad. Скачайте Билеты ПДД для Android.
Начало движения, маневрирование
ПДД РФ – 8. Начало движения, маневрирование
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.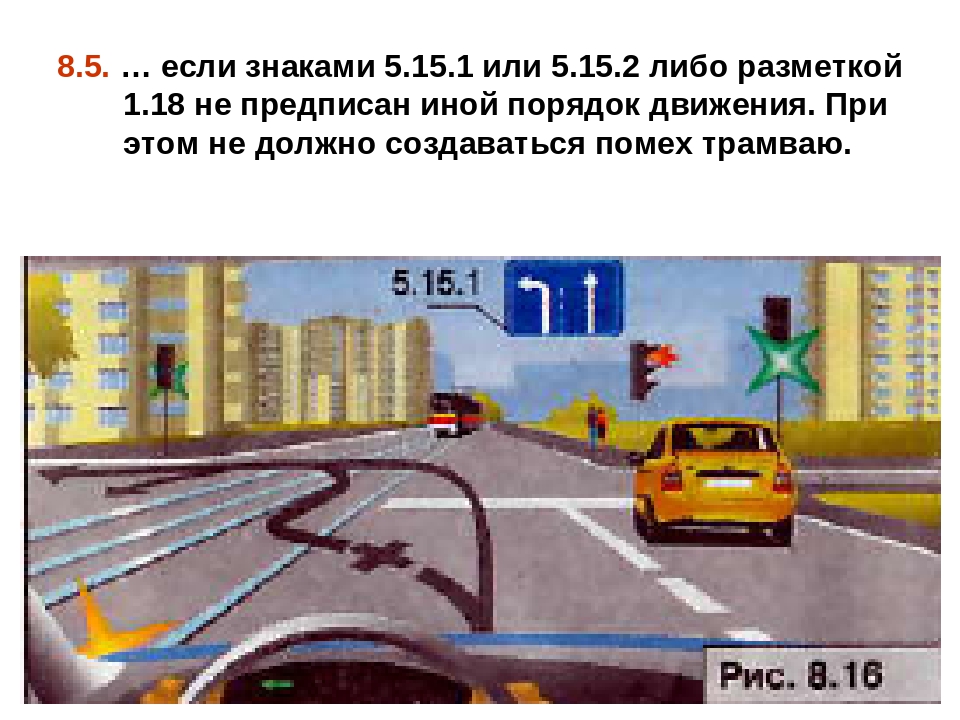
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.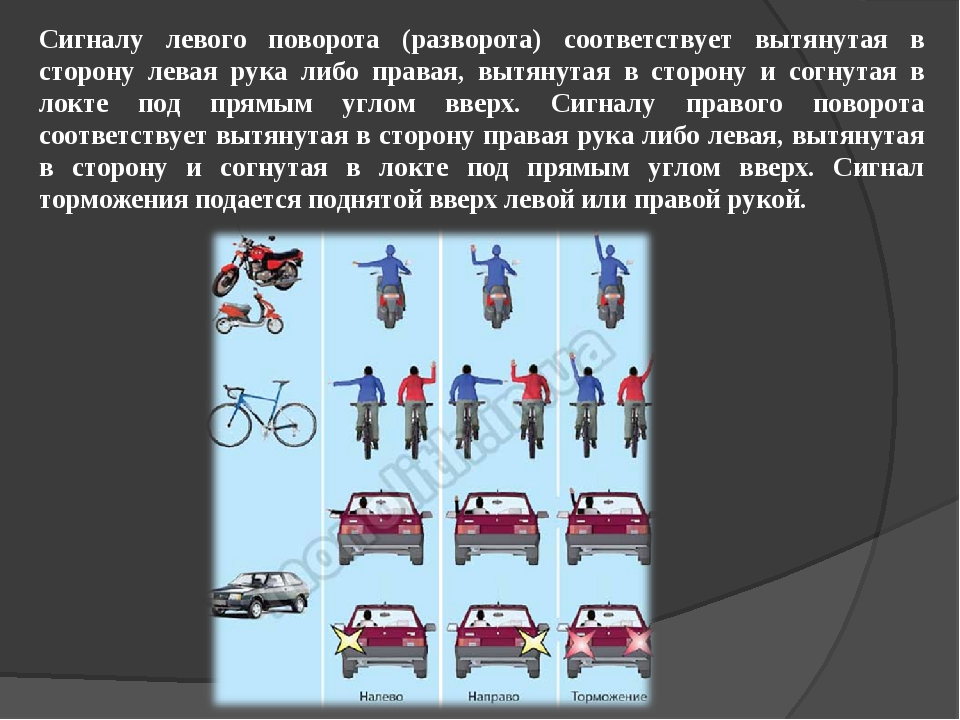
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
– на пешеходных переходах;
– в тоннелях;
– на мостах, путепроводах, эстакадах и под ними;
– на железнодорожных переездах;
– в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
– в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения маневрирование
Начало движения, маневрирование — Энциклопедия журнала «За рулем»
ПДД > Начало движения, маневрированиеВ этом разделе приведены только те пункты части ПДД «Начало движения, маневрирование», в которых люди, изучающие «Правила», часто путаются, не понимают и т.д. То есть, только то, что требует разъяснения. Остальное учащийся в состоянии изучить самостоятельно.
Этот раздел ПДД весьма короткий, но охватывает значительную часть экзаменационных вопросов — более 110. Кроме того, он очень активно используется при вождении и порой непрост в исполнении.
Остановимся на наиболее частых ошибках — как в билетах, так и при сдаче экзамена вождения.
- Сигнал поворота или «поворотник»
— Поворотник включается:
перед началом движения
;
перед перестроением;
перед поворотом или разворотом;
перед остановкой.
Это простое правило порождает немалые трудности.
Так, при сдаче экзаменов 7-8 человек из 10 забывают включить поворотник перед началом движения. Надо зарубить себе на носу: включайте поворотник перед троганием. Независимо от того, на оживленной дороге вы находитесь, или в глухом проулке, или в жилой зоне, в поле или в лесу.Если перед вами слишком близко стоит автомобиль, и вы собираетесь сдать назад прежде, чем вырулить на нужную вам полосу, включайте поворотник до того, как начали движение задним ходом!
Не важно, начинаете ли вы движение вперед или задним ходом, будете ли вы маневрировать или поедете просто прямо — все равно перед началом движения поворотник необходимо включать!
Повторотник — это прежде всего сигнал окружающим. И он говорит о том, что вы намерены начать движение. О вашем намерении начать движение. Не о том, что вы начнете двигаться немедленно, а о том, что вы лишь хотите начать двигаться.
Начинающий движение водитель обязан уступить дорогу всем транспортным средствам. Это надо выучить раз и навсегда!
Поворотник всегда включается заблаговременно, но при этом необходимо учитывать, что несвоевременное его включение может ввести в заблуждение других водителей.
На иллюстрации (слева) видно, что если водитель автомобиля 1 включит сигнал поворота слишком рано, то водитель автомобиля 2 может решить, что он хочет повернуть по красной стрелке и начнет движение. А это чревато аварией.
Правильный момент включения поворотника показан на правой картинке. Водитель 1 включает его только после того, как минует первый перекресток, чтобы водитель 2 не сомневался, что он едет прямо и ему следует уступить дорогу.
- В любом случае, всегда поворотниками следует пользоваться так, чтобы ваш маневр был понятен окружающим. Это сведет риск ДТП к минимуму.
- Следует вызубрить как «отче наш», что включенный поворотник преимущества не дает!
Это означает, что при каждом маневрировании необходимо убеждаться, что вы не создадите никому помехи. Особенно опасен поворот налево: каждый раз, прежде, чем начать сам маневр, убедитесь, что никто вас не обгоняет. - Перед поворотом направо водитель должен занять крайнее правое положение в правой полосе. И после поворота занять только крайнюю правую полосу.
- Перед поворотом налево водитель должен занять крайнее левое положение в левой полосе. После поворота он может занять любую полосу.
- При перестроении на соседнюю полосу действует правило «хозяин-гость». Здесь хозяин всегда тот, кто движется в своей полосе, а гость тот, кто хочет перестроиться. Гсть всегда уступает дорогу хозяину.
- При одновременном перестроении двух автомобилей действует правило «помеха справа».
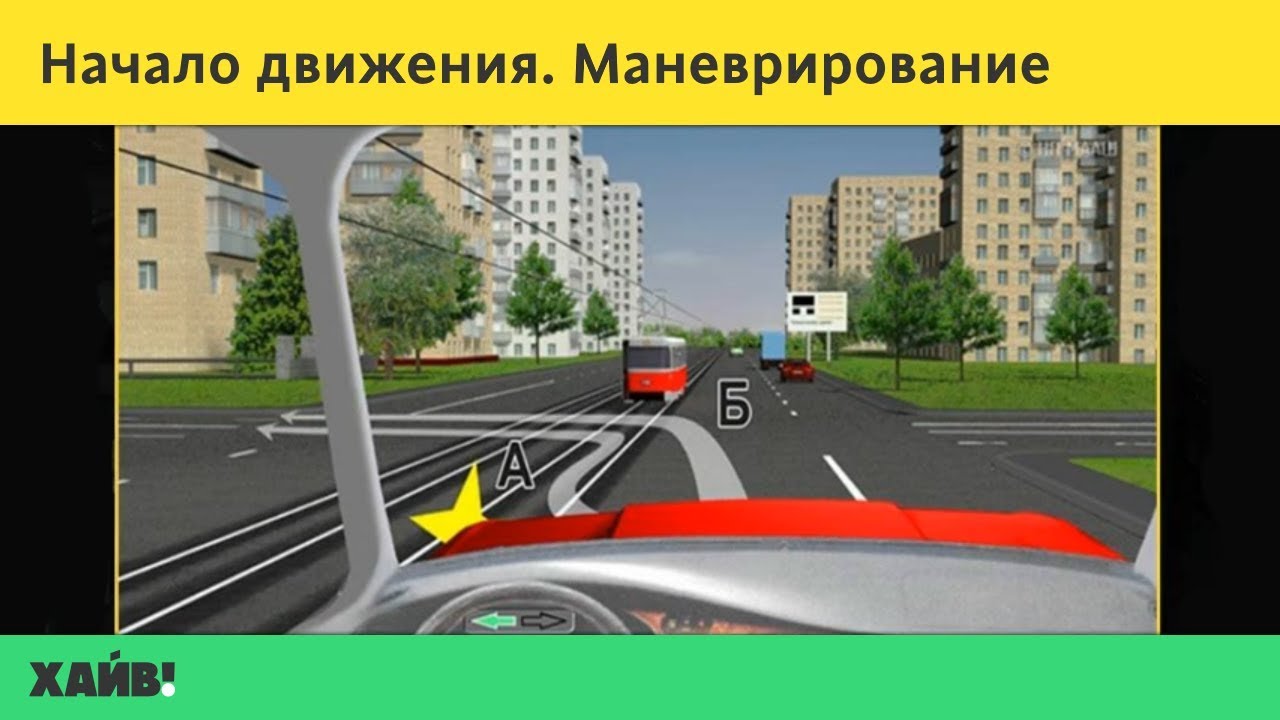
Если ширина проезжей части недостаточна для разворота из крайнего левого положения, допускается начинать разворот от правого её края или даже с правой обочины. При развороте с использованием обочины необходимо включить сначала правый поворотник, а потом, уже съехав на обочину — левый.
При развороте с использованием обочины необходимо включить сначала правый поворотник, а потом, уже съехав на обочину — левый.
- При движении задним ходом водитель обязан уступить дорогу всем.
- Пункты ПДД 8.11 и 8.12 следует выучить наизусть. В этом может помочь памятка Это запрещено Правилами
Материалы изложены на основе программы, разработанной преподавателями автошколы МГУ
Тема 8.2. Начало движения, перестроения. — Автошколадома | Автошкола онлайн | Водительские курсы ПДД | ПДД учебник онлайн
Именно так называется эта подтема в сборнике «Экзаменационные задачи тематические», по которым вы сейчас занимаетесь в автошколе. Хотя на самом деле речь тут идёт не только о начале движения и перестроениях, но ещё и о других специфических манёврах, а именно:
съезд на прилегающую территорию, выезд из прилегающей территории, съезд на полосу торможения, выезд на полосу разгона, а также о случаях, которые в Правилах не оговорены.
Начало движения.
Водитель белого автомобиля собирается начать движение после преднамеренной остановки, а водитель синего автомобиля наоборот намерен припарковаться.
Кто должен уступить дорогу?
Правила. Раздел 8. Пункт 8.1. При выполнении манёвра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сейчас оба маневрируют одновременно и если руководствоваться пунктом 8.1 Правил, то ситуация патовая – оба одновременно должны уступать дорогу друг другу.
Так почему же в реальной действительности начинающий движение обязательно уступает дорогу всем остальным, в том числе и совершающим другие манёвры?
Тут дело вот в чём. «Белый», совершив преднамеренную остановку, на некоторое время выбыл из Транспортного Мира.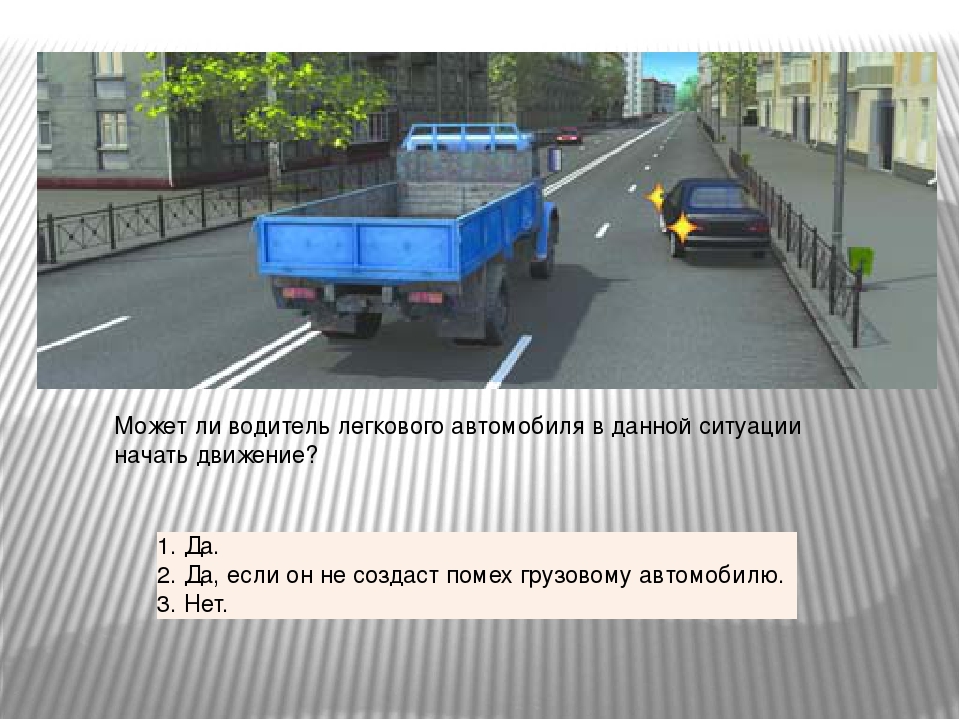 Начиная движение (то есть, возвращаясь в Транспортный Мир), образно говоря, он должен «снять шляпу, прижать её к груди и попросить у всех разрешения войти».
Начиная движение (то есть, возвращаясь в Транспортный Мир), образно говоря, он должен «снять шляпу, прижать её к груди и попросить у всех разрешения войти».
Для того чтобы его действия квалифицировались, как манёвр, ему сейчас даже необязательно перестраиваться. Сам факт перевода транспортного средства из неподвижного состояния в подвижное – уже манёвр. И, следовательно, водитель не вправе тронуться с места до тех пор, пока это может создать помехи другим участникам движения.
Откуда это следует? В тексте Правил в явном виде этого нет, а пункт 8.1 полностью выглядит так:
Правила. Раздел 8. Пункт 8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны – рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Как видим, Правила к манёврам относят следующие действия – начало движения, перестроение, поворот, разворот и преднамеренную остановку.
Но те же Правила не раскрывают, что такое «начало движения». Заглянем в «Комментарии к ПДД» (авторы А.Ю. Якимов, С.Н. Антонов, М.Б. Афанасьев и др.) под общей редакцией Главного Инспектора БДД генерал-лейтенанта В.Н. Кирьянова – «Под началом движения понимается момент трогания транспортного средства с места стоянки или остановки с перестроением на соседнюю полосу движения или без него».
То есть «Начало движения» это особенный манёвр, он протекает не в движении, а заключается в трогании с места, и именно поэтому Правила уже в названии Раздела 8 выделили этот манёвр.
Авторы Правил могли назвать этот раздел просто – «Маневрирование». Но нет, они написали именно так – «Начало движения, маневрирование», поставив «начало движения» отдельно от всех остальных манёвров.
Правила это не учебник, это Закон. И написаны Правила, как и всякий Закон, с использованием специальной юридической лексики так, что порой понять некоторые требования Правил нелегко. Но мы-то с вами пишем не Закон, а Учебник.
И написаны Правила, как и всякий Закон, с использованием специальной юридической лексики так, что порой понять некоторые требования Правил нелегко. Но мы-то с вами пишем не Закон, а Учебник.
И, следовательно, нам ничто не мешает изложить это требование Правил ясно и конкретно:
Начало движения, то есть перевод транспортного средства из неподвижного состояния в подвижное – это манёвр и, следовательно, начинать движение можно только при условии, что это не создаст никому никаких помех.
В противном случае водитель должен сохранять своё транспортное средство в неподвижном состоянии.
Кому-то из вас на экзамене достанется задача, показанная ниже. Имейте в виду – несмотря на то, что дорога в данном направлении имеет две полосы движения, правильный ответ не просто «Можно», а именно «Можно, если при этом не будут созданы помехи грузовому автомобилю».
Авторы этой задачки хотят выяснить, знаете ли вы требование пункта 8. 1 Правил. И ждут от вас такого ответа: «Да, я знаю, что начинать движение водитель может только при условии, что он не создаст никому никаких помех».
1 Правил. И ждут от вас такого ответа: «Да, я знаю, что начинать движение водитель может только при условии, что он не создаст никому никаких помех».
|
Можно ли водителю легкового автомобиля в данной ситуации начать движение от тротуара?
1. Можно.
2. Можно, если при этом не будут созданы помехи грузовому автомобилю.
3. Нельзя. |
Перестроения.
Итак, начиная движение после преднамеренной остановки, мы уступает дорогу всем, в том числе и совершающим другие манёвры. Но вот, наконец, мы тронулись, и как теперь будут развиваться события? Ведь в процессе движения неизбежно придётся перестраиваться. Как в этом случае водители разбираются в очерёдности проезда? Принцип очень простой:
Маневрирующий уступает дорогу неманеврирующему.
Этот принцип абсолютен и действует всегда, независимо от того, перестраивается ли водитель по собственному желанию или потому, что сужается проезжая часть, или потому, что водитель перестраивается, завершая обгон. Всегда и везде маневрирующий не должен создавать помех неманеврирующему. Вот как об этом сказано в Правилах:
Правила. Раздел 8. Пункт 8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения.
Вот как об этом вас будут спрашивать на экзамене:
|
Водитель автомобиля, выполняющий перестроение на правую полосу, в данной ситуации:
1. Не должен создавать помех движущемуся по правой полосе автомобилю.
2. Имеет преимущество, так как завершает обгон. |
|
Обязан ли водитель автомобиля, который движется по левой полосе, уступить дорогу в данной ситуации?
1.
2. Не обязан. |
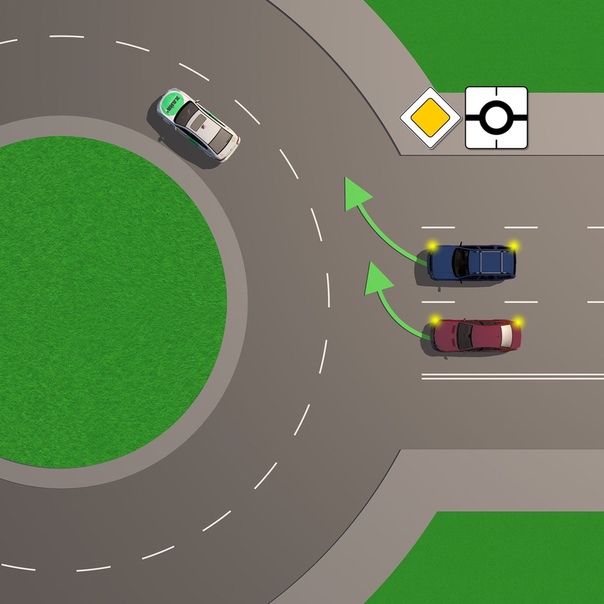 Обязан.
Обязан.
|
При перестроении на правую полосу в данной ситуации Вы:
1. Должны уступить дорогу автомобилю, движущемуся по соседней полосе.
2. Имеете преимущество в движении. |
Ну, хорошо, если один перестраивается, а другой нет, всё понятно – уступает тот, кто перестраивается. А если оба перестраиваются одновременно, тогда как? Ответ на этот вопрос очень прост и логичен:
Раз они оба чего-то хотят, значит, их статус на дороге одинаков. А, стало быть, и право на проезд у них равное.
А при равном праве на проезд всегда вступает в действие общий принцип «помехи справа».
Вот как об этом сказано в Правилах:
Правила. Раздел 8. Пункт 8.4. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
Раздел 8. Пункт 8.4. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
Вот как об этом вас будут спрашивать на экзамене:
|
Кто должен уступить дорогу при одновременном перестроении?
1. Водитель легкового автомобиля.
2. Водитель мотоцикла. |
|
Кто должен уступить дорогу при взаимном перестроении?
1. Водитель легкового автомобиля.
2. Водитель грузового автомобиля. |
Съезд с дороги на прилегающую территорию.
Съезжая с дороги на прилегающую территорию, водители пересекают траекторию движения пешеходов и велосипедистов, и по поводу этой ситуации Правила в пункте 8. 3 высказались вполне конкретно:
3 высказались вполне конкретно:
Правила. Раздел 8. Пункт 8.3. При съезде с дороги на прилегающую территорию водитель должен уступить дорогу пешеходам и велосипедистам, путь движения которых он пересекает.
|
Водители обоих автомобилей намерены заехать во двор. Кто из них должен уступить дорогу пешеходам и велосипедисту?
1. Только водитель чёрного автомобиля.
2. Только водитель синего автомобиля.
3. Оба должны уступить дорогу и пешеходам, и велосипедисту. |
Выезд на дорогу из прилегающей территории.
Правила. Раздел 8. Пункт 8.3. При выезде на дорогу из прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней.
Вы обратили внимание! – Правила не уточнили, каким именно транспортным средствам надо уступать дорогу. А, значит, уступать нужно всем – и механическим, и немеханическим транспортным средствам. Ну, и конечно, пешеходам.
|
Вы выезжаете из двора. Должен ли водитель чёрного автомобиля, руководствуясь принципом помехи справа, уступить Вам дорогу?
1. Да, должен.
2. Нет, не должен. |
|
Выезжая из прилегающей территории водитель должен уступить дорогу…
1. Только пешеходам.
2. Только велосипедисту.
3. И пешеходам и велосипедисту. |
|
Кто должен уступить дорогу? 1.
2. Уступить дорогу должен «Б», так как выезжает с АЗС, то бишь из прилегающей территории. |
 Уступить дорогу должен «А» по принципу помехи справа.
Уступить дорогу должен «А» по принципу помехи справа.
Съезд с дороги на полосу торможения.
С этой ситуацией мы уже знакомились, когда проходили горизонтальную дорожную разметку. Остаётся только повторить пройденное.
Только что все летели со скоростью под сотню, и вдруг у автомобиля впереди включился указатель поворота и через секунду вспыхнули стоп-сигналы – водитель тормозит, готовясь вписаться в поворот.
Теперь и вам надо тормозить, и тем, кто за вами, и хорошо ещё, если все держат безопасную дистанцию, и это неожиданное торможение останется без последствий.
Проблема полностью снимается, если перед съездом добавить ещё одну полосу – полосу торможения и одновременно обязать водителей:
Сначала необходимо (не снижая скорости!) перестроиться на полосу торможения, а вот теперь, пожалуйста – можете тормозить, вписываясь в поворот.
Вот как об этом сказано в Правилах:
Правила. Раздел 8. Пункт 8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
Съезд на дорогу с полосы разгона.
Похожая проблема возникает и при въезде на дорогу. Чтобы обеспечить надлежащую безопасность, въезд на дорогу тоже могут оборудовать дополнительной полосой – полосой разгона.
В этом случае водители не имеют права въезжать на дорогу напрямую, они обязаны сначала двигаться по полосе разгона:
Правила. Раздел 8. Пункт 8.10. При наличии в месте выезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
Случаи маневрирования, не оговорённые в Правилах.
Итак, Правила особо оговорили следующие случаи маневрирования:
Начало движения.
Перестроения.
Съезд с дороги на прилегающую территорию.
Выезд на дорогу из прилегающей территории.
Съезд с дороги на полосу торможения.
Съезд на дорогу с полосы разгона.
Применительно к этим случаям маневрирования авторы Правил разработали различные требования, с которыми мы только что познакомились. А всё, что осталось неоговоренным, Правила объединили одним требованием:
Правила. Раздел 8. Пункт 8.9. В случаях, когда траектории транспортных средств пересекаются, а очерёдность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
И это логично – если интересы водителей пересекаются в местах, где нет ни главной дороги, ни второстепенной, нет ни светофоров, ни регулировщика, они должны устанавливать очерёдность проезда самостоятельно по принципу «помехи справа».
Вот как вас об этом спросят на экзамене:
|
Кто должен уступить дорогу при одновременном развороте?
1. Водитель автобуса.
2. Водитель легкового автомобиля. |
|
Как Вам следует действовать, выезжая с места стоянки одновременно с другим автомобилем?
1. Уступить дорогу.
2. Проехать первым.
Поясняю рисунок. Выезд со стоянки слева от Вас (у Вас включёны левые «поворотники» – на щитке приборов мигает зелёная стрелка). Встречный тоже собирается выезжать со стоянки. Сейчас траектории движения автомобилей будут пересекаться, и это как раз тот случай, когда очерёдность движения не оговорена Правилами. |

Начало движения, маневрирование
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны – рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.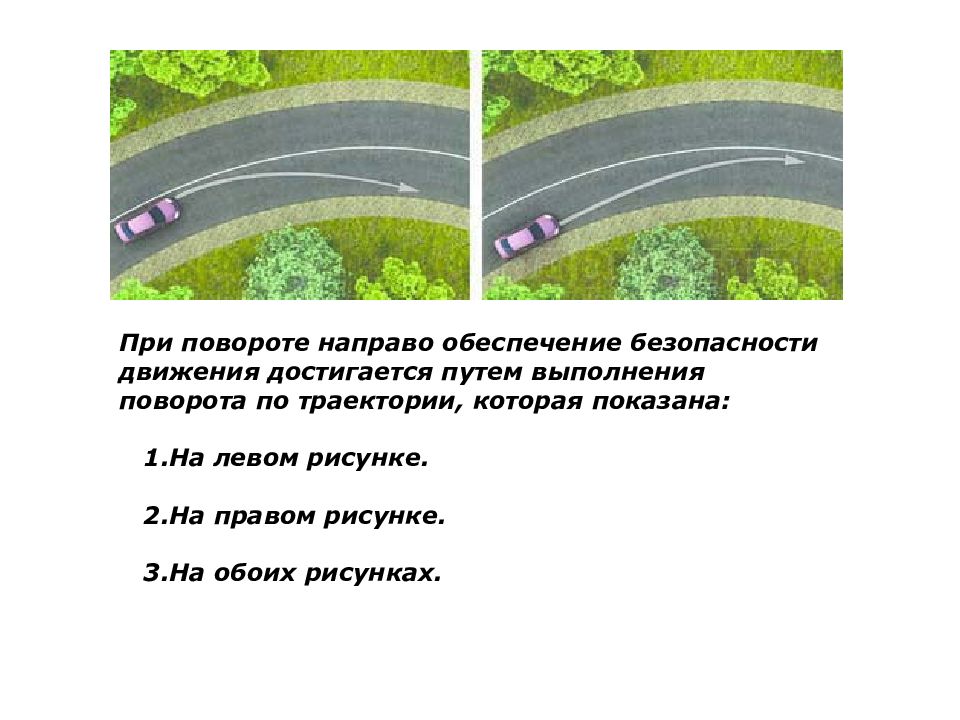
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.

8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения, маневрирование
Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
- Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
- Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх.
- Сигнал торможения подается поднятой вверх левой или правой рукой.
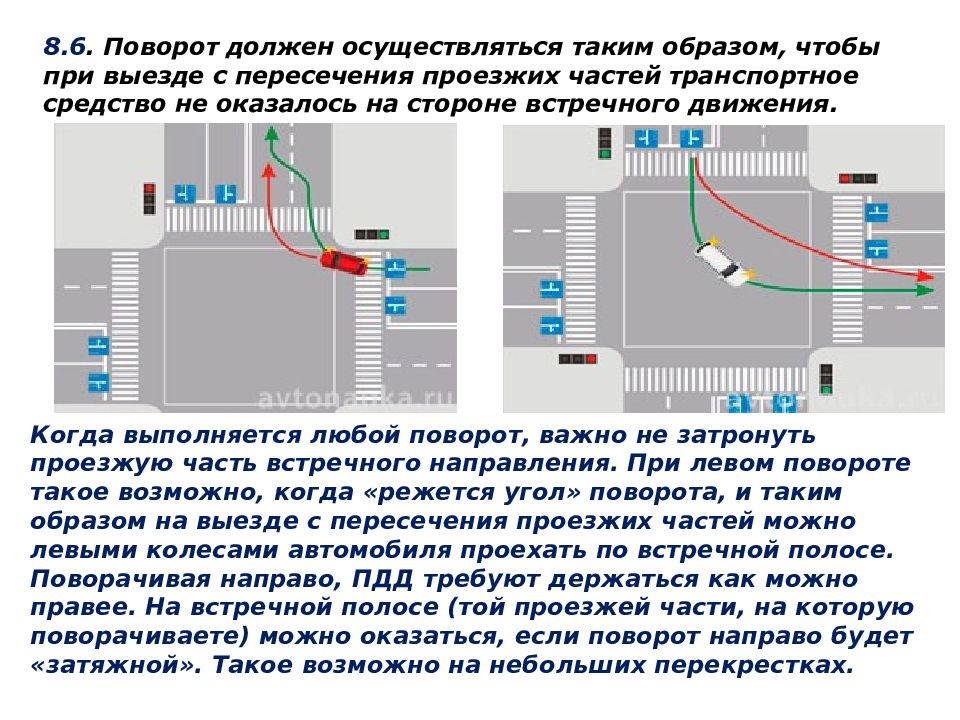
+ 25
Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
+ 10
+ 6
При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения.
При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
+ 11
Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение .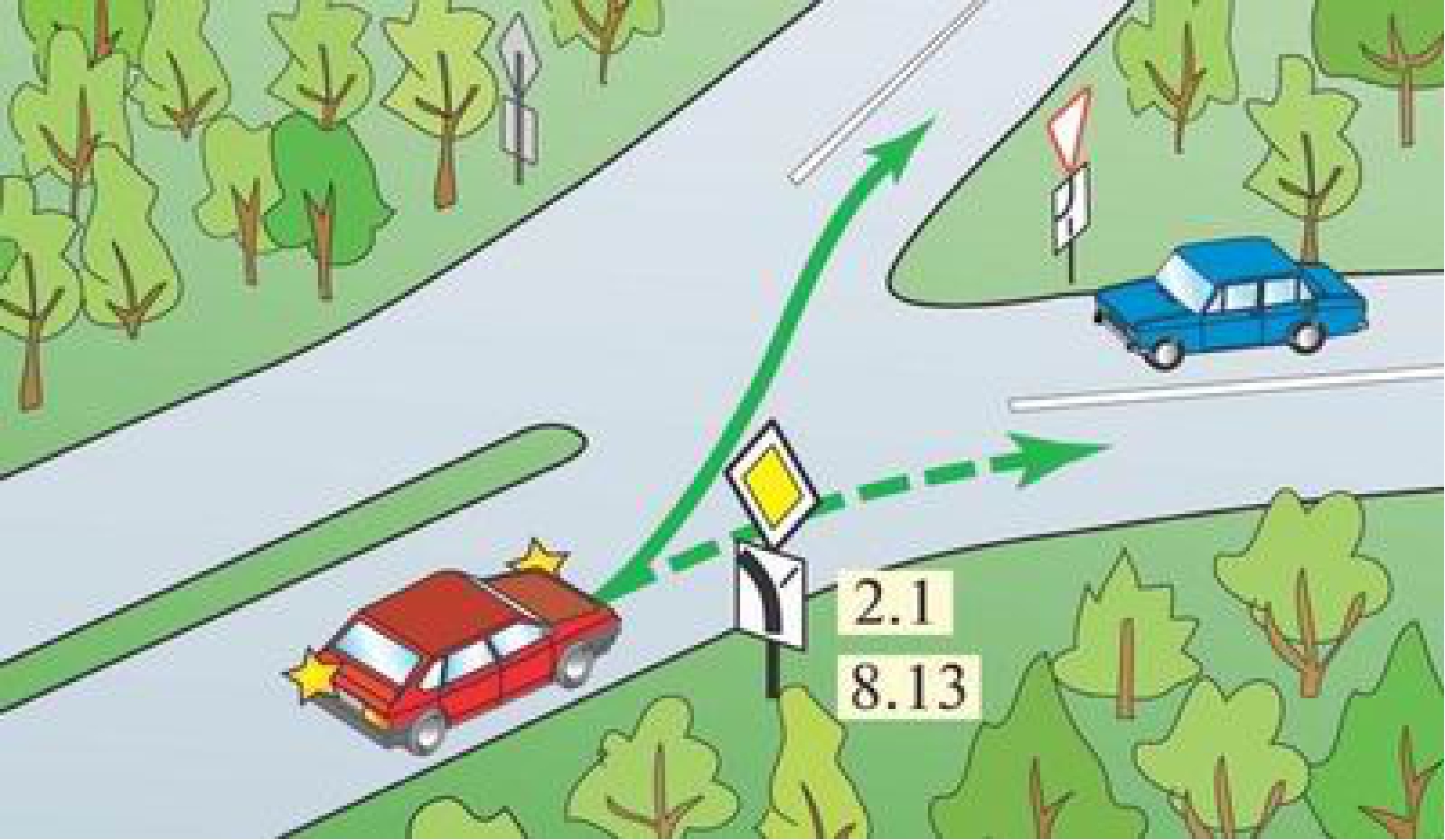
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаком 5.15.1 или знаком 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
+ 20
Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
+ 13
Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
+ 1
При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.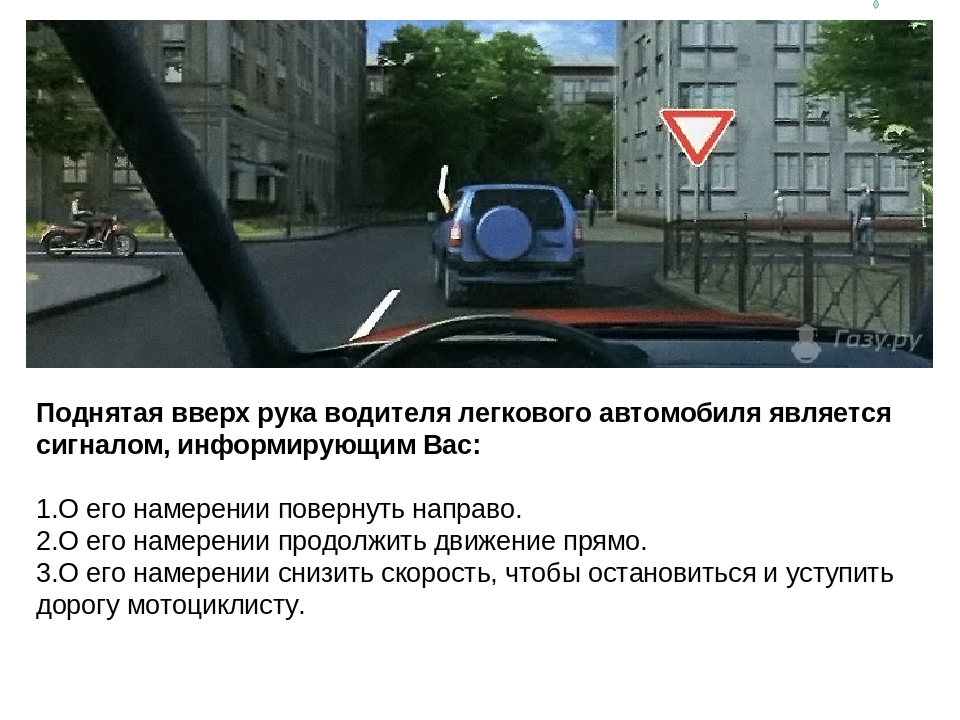
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
+ 5
В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
+ 5
При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
+ 3
Разворот запрещается:
+ 17
Движение задним ходом запрещается:
Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
При необходимости водитель должен прибегнуть к помощи других лиц.
+ 11
Дополнительные главы:8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой. Сигналы водителя рукой: торможение, поворот направо, поворот налево (разворот)
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения. Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам
и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и
разворот должны выполняться с них, если знаками 5.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения. При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления. Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу,
уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц. Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Далее: раздел «Расположение транспортных средств на проезжей части» >> Дополнительные главы:
|
 При повороте (в данном случае
— направо) необходимо включить соответствующий указатель поворота
При повороте (в данном случае
— направо) необходимо включить соответствующий указатель поворота
 Вам необходимо перестроиться
вправо, подав соответствующий сигнал указателем поворота
Вам необходимо перестроиться
вправо, подав соответствующий сигнал указателем поворота На данном нерегулируемом перекрестке равнозначных дорог
преимущество принадлежит легковому автомобилю, приближающемуся справа, которому мотоциклист и собирается уступить дорогу
На данном нерегулируемом перекрестке равнозначных дорог
преимущество принадлежит легковому автомобилю, приближающемуся справа, которому мотоциклист и собирается уступить дорогу Предварительно необходимо подать сигнал поворота
Предварительно необходимо подать сигнал поворота

 5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на
проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на
перекресток, где организовано круговое движение.
5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на
проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на
перекресток, где организовано круговое движение.
 Следовательно, поворот по траектории В запрещен.
Чтобы после выполнения поворота оказаться ближе к правому краю проезжей части, поворачивайте по траектории Б
Следовательно, поворот по траектории В запрещен.
Чтобы после выполнения поворота оказаться ближе к правому краю проезжей части, поворачивайте по траектории Б
 15.1 или 5.15.2 либо
разметкой 1.18 не предписан иной порядок движения.
При этом не должно создаваться помех трамваю.
15.1 или 5.15.2 либо
разметкой 1.18 не предписан иной порядок движения.
При этом не должно создаваться помех трамваю.
 Можете выполнять поворот по любой
из траекторий: на данной дороге нет встречной полосы, на которую нельзя выезжать при повороте
Можете выполнять поворот по любой
из траекторий: на данной дороге нет встречной полосы, на которую нельзя выезжать при повороте
 Выполняя маневр
по траектории А, вы выезжаете на полосу встречного движения, что запрещено Правилами
Выполняя маневр
по траектории А, вы выезжаете на полосу встречного движения, что запрещено Правилами 9. В случаях когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами,
дорогу должен уступить водитель, к которому транспортное средство приближается справа.
9. В случаях когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами,
дорогу должен уступить водитель, к которому транспортное средство приближается справа.

 Если на данном участке видимость больше 100 м, Вы можете выполнить разворот
Если на данном участке видимость больше 100 м, Вы можете выполнить разворот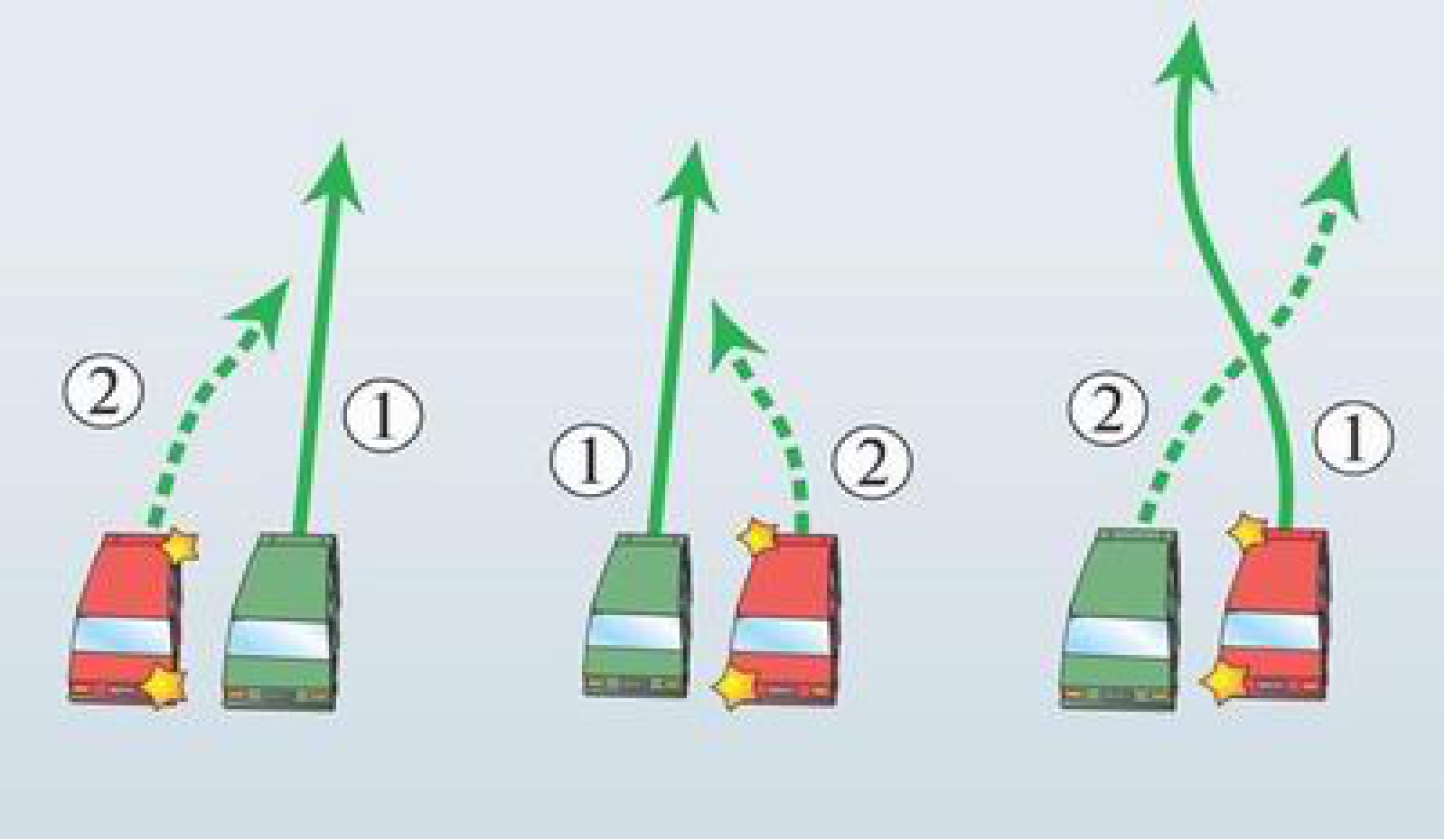
Начало движения, маневрирование — ПДД 2018
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги – пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами дорожного движения, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах расположения остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8. 11 Правил.
11 Правил.
8. Начало движения, маневрирование | Актуальные ПДД 2019 года
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.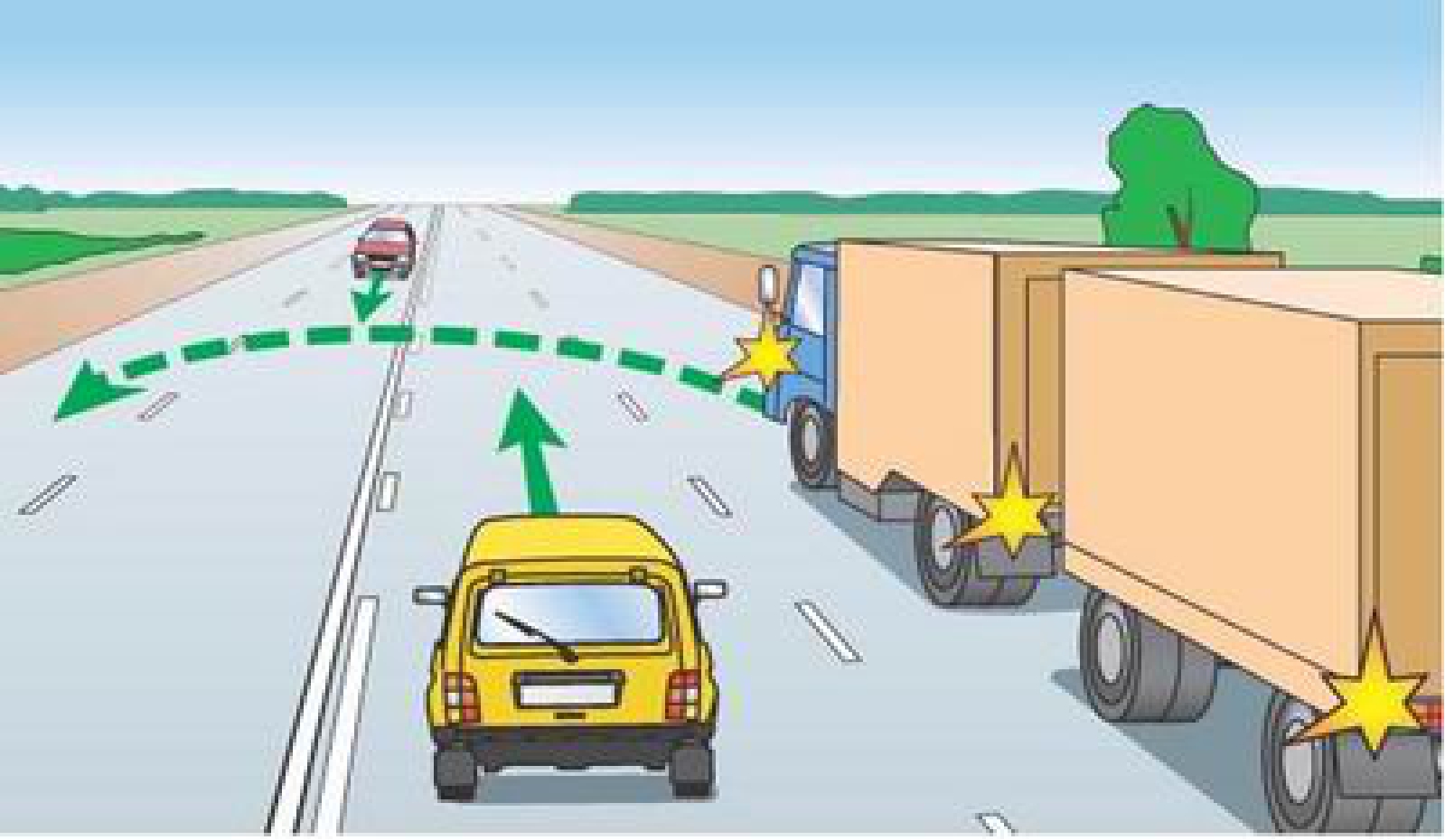
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
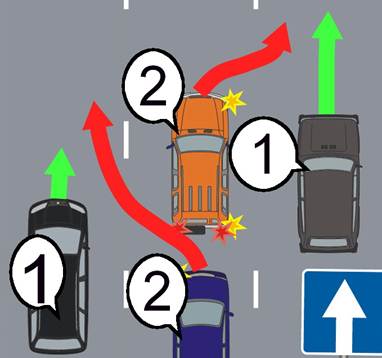
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения, маневрирование
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения.
Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.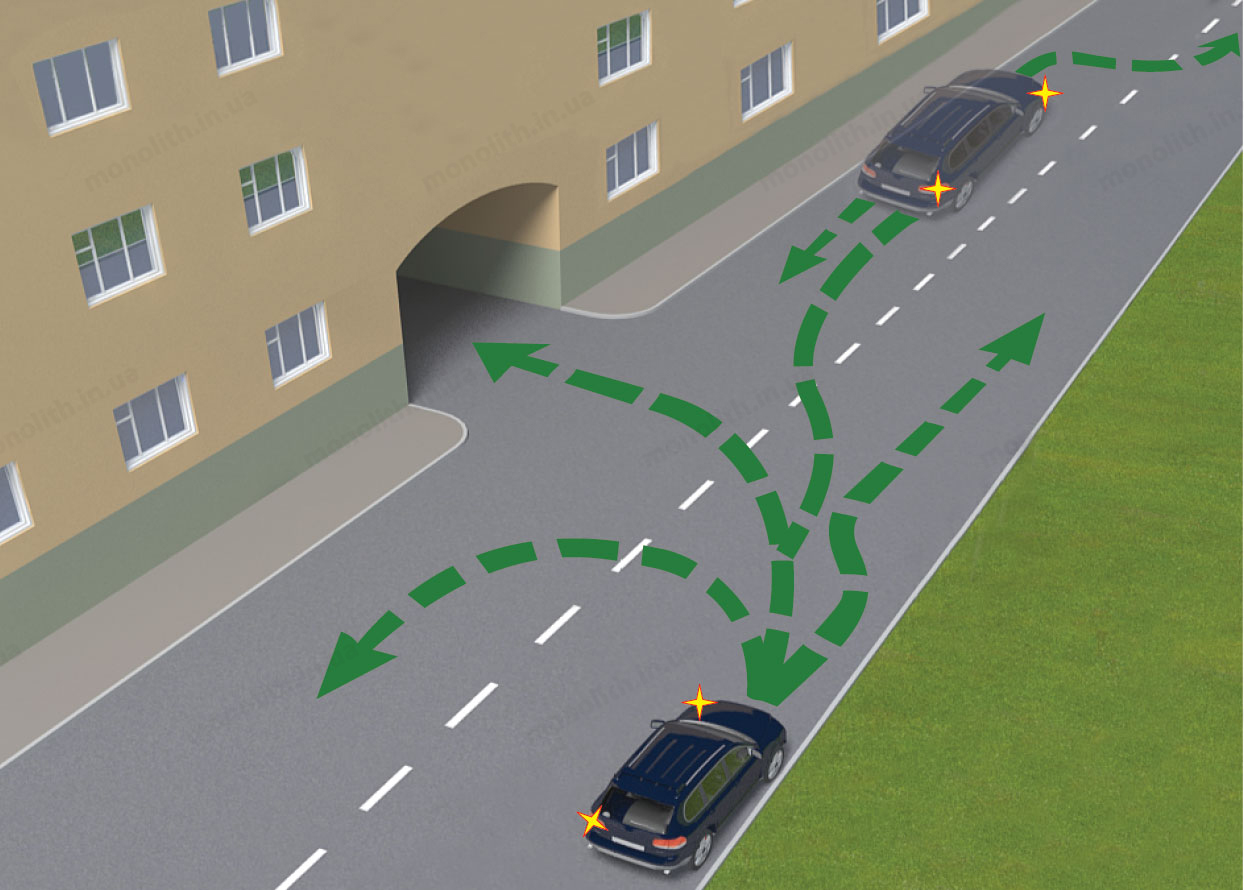
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками 5.15.1 или 5.15.2 либо разметкой 1.18 не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8. 5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
ПДД Экзамен — Начало движения, маневрирование
8.1. Перед началом движения, перестроением, поворотом (разворотом) и остановкой водитель обязан подавать сигналы световыми указателями поворота соответствующего направления, а если они отсутствуют или неисправны — рукой. При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
При выполнении маневра не должны создаваться опасность для движения, а также помехи другим участникам дорожного движения.
Сигналу левого поворота (разворота) соответствует вытянутая в сторону левая рука либо правая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигналу правого поворота соответствует вытянутая в сторону правая рука либо левая, вытянутая в сторону и согнутая в локте под прямым углом вверх. Сигнал торможения подается поднятой вверх левой или правой рукой.
8.2. Подача сигнала указателями поворота или рукой должна производиться заблаговременно до начала выполнения маневра и прекращаться немедленно после его завершения (подача сигнала рукой может быть закончена непосредственно перед выполнением маневра). При этом сигнал не должен вводить в заблуждение других участников движения. Подача сигнала не дает водителю преимущества и не освобождает его от принятия мер предосторожности.
8.3. При выезде на дорогу с прилегающей территории водитель должен уступить дорогу транспортным средствам и пешеходам, движущимся по ней, а при съезде с дороги — пешеходам и велосипедистам, путь движения которых он пересекает.
8.4. При перестроении водитель должен уступить дорогу транспортным средствам, движущимся попутно без изменения направления движения. При одновременном перестроении транспортных средств, движущихся попутно, водитель должен уступить дорогу транспортному средству, находящемуся справа.
8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении, кроме случаев, когда совершается поворот при въезде на перекресток, где организовано круговое движение.
При наличии слева трамвайных путей попутного направления, расположенных на одном уровне с проезжей частью, поворот налево и разворот должны выполняться с них, если знаками
5.15.1
или
5.15.2
либо разметкой 1.18
не предписан иной порядок движения. При этом не должно создаваться помех трамваю.
8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения. При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления. Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней. При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц. Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Начало движения и маневрирование
Начало движения и маневрирование
Световые указатели поворотов являются предупредительными сигналами информирующими других участников дорожного движения о намерении водителя совершить определенный маневр, связанный с изменением его расположения относительно проезжей части.Включать эти сигналы необходимо заблаговременно до совершения маневра, заранее предупредив других водителей о своих намерениях, давая им время правильно оценить замеченный сигнал и предпринять необходимые меры безопасности.
Подаваемый сигнал не должен вводить в заблуждение других участников движения. Водитель должен быть уверен, что его сигналы будут правильно восприняты другими водителями.
Выключать сигналы необходимо сразу после завершения маневра, не заблуждая других участников движения о своих намерениях.
Если сигналы поворота неисправны или отсутствуют, они должны подаваться рукой водителя. Вытянутая в сторону левая рука заменяет левый указатель поворота, правая рука-правый. Согнутая в локте левая рука заменяет правый указатель поворота, согнутая правая рука-левый. Поднятая вверх левая или правая рука водителя служит предупреждением об остановке, при неработающих стоп-сигналах. Прекращать подучу сигнала рукой необходимо непосредственно перед выполнением маневра, управляя транспортным средством двумя руками.
Включай левые указатели поворота:
1.Перед началом движения от правой кромки дороги.
2.Перед обгоном с левой стороны.
3.Перед перестроением на левую полосу.
4.Перед объездом препятствия с левой стороны.
5.Перед поворотом налево или разворотом.
6.Перед остановкой у левой кромки дороги.
Включай правые указатели поворота:
1.Перед началом движения от левой кромки дороги.
2.Перед обгоном с правой стороны.
3.Перед перестроением на правую полосу.
4.Перед объездом препятствия с правой стороны.
5.Перед поворотом направо.
6.Перед остановкой у правой кромки дороги.
При выезде на дорогу с прилегающей к ней территории, водитель обязан уступить дорогу транспортным средствам, движущимся по ней, а так же пешеходам. При съезде на прилегающую территорию водитель обязан уступить дорогу пешеходам и велосипедистам, если траектории движения их пересекаются.
При перестроении на другую полосу, водитель обязан уступить дорогу транспортным средствам движущимся по этой полосе.
При одновременном перестроении преимущество имеет водитель, у которого помеха слева. Находясь на водительском сиденье слева лучше видно дорожную ситуацию и легче оценивать дорожную обстановку.
Перед поворотом направо или налево (разворотом), необходимо заранее перестроиться на крайнюю правую (левую ) полосу и осуществлять повороты только с них, не создавая помех попутным автомобилям, движущимся в других направлениях. Поворот направо разрешен на крайнюю правую полосу пересекаемой дороги, налево (разворот) на любую. Движение прямо разрешается с любой полосы. При наличии слева трамвайных путей поворот налево (разворот) должен осуществляться с трамвайного пути попутного направления. При этом водитель не должен создавать помехи для движения трамваев. Выполняя условия этих правил, поворачивающий автомобиль освобождает все правые полосы для безрельсовых транспортных средств.
Исключение составляют перекрестки с круговым движением, движение осуществляется в одном направлении, против часовой стрелки, при отсутствуют помех справа) и перекрестки, на которых установлены знаки 5.8.1. (направление движения по полосам),5.8.2.(направление движения по полосе) или разметка 1.18.
Повороты должны осуществляться таким образом, что бы при выезде с пересечения проезжих частей не оказаться на полосе встречного движения.
Если транспортное средство из- за своих габаритов не может осуществить поворот с крайней полосы, допускается отступить от требования правил. Например, если автопоезд при повороте направо будет круто поворачивать с крайней правой полосы возможен наезд на тротуар задними колесами. При повороте налево с крайней левой полосы траектория движения может не позволить произвести поворот за один раз. При этом могут произойти заторы и ситуация создаст невозможным проезд другим транспортным средствам.
При повороте налево или развороте вне перекрестка водитель обязан заранее перестроиться на крайнюю левую полосу или на трамвайные пути попутного направления (не создавая помех трамваю), пропустив все встречные транспортные средства. Находясь на левой полосе или на трамвайных путях водитель освобождает правые полосы, не создавая помех для движения транспортных средств попутного направления.
Встречные автомобили, двигаясь даже с небольшой скоростью, будут представлять опасность для водителя выполняющего поворот налево или разворот.
Вне перекрестка, где ширина проезжей части недостаточна для разворота с крайней левой полосы, правила разрешают данный маневр от правого края проезжей части или обочины.
При повороте налево и развороте автомобиль закрывает по ширине значительную часть дороги встречного направления и создает помехи движению встречных транспортных средств. Поэтому водитель обязан пропустить транспортные средства встречного направления, а при развороте от правого края проезжей части или обочины и автомобили попутных направлений.
В случаях, когда траектории транспортных средств пересекаются и очередность не оговорена правилами дорогу должен уступить водитель, к которому автомобиль приближается справа.
При наличии полосы разгона (торможения) водители обязаны снижать скорость только на ней. Выезжать с нее разрешается при условии, если не создаются помехи для движения транспортных средств, находящихся на основной дороге. Полосы разгона (торможения) применяются в основном на автомагистралях в местах примыкания и пересечения дорог.
При развороте и движении задним ходом скорость автомобиля минимальная, видимость дороги ограничена. При этом возможны длительные помехи для других участников движения. Транспортное средство, выполняющие разворот, представляет опасность на проезжей части.
Поэтому эти маневры
запрещены:1.На пешеходных переходах.
2.В тоннелях.
3.На мостах, путепроводах, эстакадах и под ними.
4.На железнодорожных переездах.
5.В местах с видимостью дороги менее 100 метров хотя бы в одном направлении.
6.В местах расположения остановок маршрутных транспортных средств
Движение задним ходом запрещено так же на перекрестках.
Данный маневр разрешается, если он будет безопасен и не создаст помех для движения других участников движения. В случае необходимости водитель должен прибегнуть к помощи других лиц.
8. Начало движения, маневрирование. ПДД онлайн
8.7. Если транспортное средство из-за своих габаритов или по другим причинам не может выполнить поворот с соблюдением требований пункта 8.5 Правил, допускается отступать от них при условии обеспечения безопасности движения и если это не создаст помех другим транспортным средствам.
Крупногабаритный транспорт (особенно длинномерный) при повороте не всегда может вписаться в выделенную полосу движения. Если ваш автомобиль находится рядом с таким ТС, будьте внимательны: его задние колеса смещаются к центру поворота. Вывод: поворачивать одновременно с таким транспортом, находясь с внутренней стороны поворота, опасно.
8.8. При повороте налево или развороте вне перекрестка водитель безрельсового транспортного средства обязан уступить дорогу встречным транспортным средствам и трамваю попутного направления.
Если при развороте вне перекрестка ширина проезжей части недостаточна для выполнения маневра из крайнего левого положения, его допускается производить от правого края проезжей части (с правой обочины). При этом водитель должен уступить дорогу попутным и встречным транспортным средствам.
Перед поворотом налево или разворотом вне перекрестка требуется пропустить весь встречный транспорт и трамвай попутного направления, т.е. уступить всем им дорогу. При выполнении этих маневров (поворот налево и разворот), пункт 8.5 требует занять крайнее левое положение на проезжей части. Но иногда ширина проезжей части может оказаться узкой для выполнения разворота из крайнего левого положения (проще сказать, с середины дороги). В таком случае допускается развернуться от правого края проезжей части (если проезжая часть упирается в бордюр), или с правой обочины (если таковая имеется). При этом варианте разворота потребуется уступить дорогу как встречному, так еще и попутному транспорту.
8.9. В случаях, когда траектории движения транспортных средств пересекаются, а очередность проезда не оговорена Правилами, дорогу должен уступить водитель, к которому транспортное средство приближается справа.
Указанные ситуации чаще всего встречаются во дворах, на стоянках, полянах, автозаправках, прилегающих территориях и т.п. В таких случаях уступает дорогу тот, у кого помеха справа.
8.10. При наличии полосы торможения водитель, намеревающийся повернуть, должен своевременно перестроиться на эту полосу и снижать скорость только на ней.
При наличии в месте въезда на дорогу полосы разгона водитель должен двигаться по ней и перестраиваться на соседнюю полосу, уступая дорогу транспортным средствам, движущимся по этой дороге.
В целях поддержания скоростного режима и пропускной способности дорог, их оборудуют дополнительными полосами – разгона и торможения, которые отделяются от основной дороги горизонтальной разметкой 1.8. Для того чтобы съехать с такой дороги, сначала нужно перестроиться на полосу торможения, и уже на ней снижать скорость. Заезжая на дорогу с полосой разгона, сначала нужно двигаться по ней, чтобы набрать скорость, затем, уступив дорогу попутному транспорту, перестроиться на соседнюю полосу (на основную дорогу).
8.11. Разворот запрещается:
- на пешеходных переходах;
- в тоннелях;
- на мостах, путепроводах, эстакадах и под ними;
- на железнодорожных переездах;
- в местах с видимостью дороги хотя бы в одном направлении менее 100 м;
- в местах остановок маршрутных транспортных средств.
Кроме указанных в пункте 8.11 мест, разворот еще может быть запрещен дорожными знаками и дорожной разметкой. В некоторых случаях еще нужно обращать внимание на сигналы светофоров (чаще с дополнительными секциями). На линзах могут быть нанесены стрелки, запрещающие разворот. Это стрелки «прямо», «прямо и направо».
8.12. Движение транспортного средства задним ходом разрешается при условии, что этот маневр будет безопасен и не создаст помех другим участникам движения. При необходимости водитель должен прибегнуть к помощи других лиц.
Движение задним ходом запрещается на перекрестках и в местах, где запрещен разворот согласно пункту 8.11 Правил.
Кроме того, движение задним ходом запрещается на автомагистралях (обозначаются знаком 5.1) и на дорогах для автомобилей (обозначаются знаком 5.3)
Создание сценария обгона для автономных транспортных средств с помощью программного обеспечения PreScan
https://doi.org/10.1016/j.treng.2020.100029Получить права и контентОсновные моменты
- •
В исследовании представлены разработки, конструкция и моделирование сценария обгона с автономными транспортными средствами. Сценарий моделирования построен с использованием различных элементов, таких как трехполосная однонаправленная дорожная инфраструктура, независимые от технологий датчики (TIS) и участники или транспортные средства.Каждый элемент сценария обгона создается с помощью программы моделирования под названием PreScan software, которая выполняет функции моделирования с помощью Advanced Driver Assistance Systems (ADAS). Кроме того, PreScan — это открытое программное обеспечение, которое можно использовать в сочетании с другими программами, такими как программное обеспечение MATLAB и программное обеспечение Simulink, для создания таблицы компиляции, которая включает все соответствующие соединения с двигателем моделирования и существующие различных участников в различных классах. PreScan.
- •
Смена полосы движения автономного транспортного средства в маневре обгона осуществляется с применением технологических независимых датчиков (TIS), которые сканируют геометрию объекта с целью генерирования данных моделирования с помощью поля дальности видимости, прецессии дальности и разрешающей способности ближнего элемента. Он также использует систему, которая принадлежит к расширенным системам помощи водителю (ADAS), то есть адаптивный круиз-контроль (ACC).Эта система ACC непрерывно контролирует и регулирует скорость транспортного средства, выполняющего маневр обгона, чтобы избежать сближения, которое приводит к столкновению с другими транспортными средствами на дороге. Ускорение, а также торможение автономного транспортного средства также контролируются системой ACC.
- •
Чтобы выполнить маневр обгона на автономных транспортных средствах, целесообразно разделить маневр на несколько этапов для достижения желаемого результата.Фазы маневра обгона — это фаза (1) отклонения от исходной полосы движения, которая начинается в тот момент, когда ведущее транспортное средство, которое собирается выполнить маневр обгона, находится на значительном расстоянии от другого ведущего транспортного средства с меньшей скоростью. Фаза (2) вождения по прямой, в которой ведущее транспортное средство меняет полосу движения с исходной полосы и оказывается на другой полосе дороги, двигаясь по прямой линии, пока не достигнет фазы (3), возвращение на полосу, где ведущее транспортное средство начинает возвращаться на свою исходную полосу с учетом местоположения ведущего транспортного средства.
Аннотация
Автономные транспортные средства (АВ) — это транспортные средства, способные имитировать вождение человека, навыки управления и способность воспринимать окружающую среду во время движения по дороге. Таким образом, одним из методов, который следует подробно изучить, является маневр обгона, который является одним из самых опасных сценариев для транспортных средств на дороге, поскольку при обгоне возникают изменения в ускорении и замедлении транспортных средств и изменения в нормальном движении транспортных средств. когда они переходят на другую полосу движения.Маневр обгона заключается в обгоне другого транспортного средства, которое движется в том же направлении с меньшей скоростью. В статье предлагается моделирование сценария маневра обгона с использованием АВ с помощью программного обеспечения для моделирования PreScan, которое включает в себя адаптивный круиз-контроль (ACC) и технологические независимые датчики (TIS) для выполнения маневра обгона. Результаты показали, что AV способны выполнять маневры обгона в городских условиях с участием обычных транспортных средств.Таким образом, использование программного обеспечения, имитирующего маневры обгона AV, становится полезным инструментом для интерпретации характеристик AV с препятствиями на дороге.
Ключевые слова
Адаптивный круиз-контроль
Расширенные системы помощи водителю
Автономные автомобили
Маневр обгона
PreScan
Технологии независимых датчиков
Рекомендуемые статьиЦитирующие статьи (0)
© 2020 Автор. Опубликовано Elsevier Ltd.
Рекомендуемые статьи
Цитирующие статьи
Сквозное автоматическое маневрирование с учетом стиля вождения с использованием градиентного алгоритма глубоко детерминированной политики
Аннотация
Смена полосы движения во время движения требует координации поперечного и продольного управления автомобилем. учитывая его рабочее состояние и окружающую среду. Хотя существующий метод автоматической смены полосы движения на основе правил прост, он не подходит для непредсказуемых сценариев, встречающихся на практике.Поэтому, используя алгоритм глубокого детерминированного градиента политики (DDPG), мы предлагаем сквозной метод автоматической смены полосы движения на основе данных лидара. Информация о состоянии расстояния границы полосы движения и окружающих транспортных средств, полученная агентом в среде моделирования, обозначается как пространство состояний для задачи автоматической смены полосы движения на основе обучения с подкреплением. Угол поворота рулевого колеса и продольное ускорение используются в качестве области действия, и области состояния и действия являются непрерывными.Что касается функции вознаграждения, то предотвращение столкновения и установка различных ожидаемых расстояний для смены полосы движения, которые представляют разные стили вождения, рассматриваются в целях безопасности, а угловая скорость рулевого колеса и рывки учитываются для комфорта. Минимальный предел скорости для смены полосы движения и контроль агента для быстрой смены полосы движения рассматриваются для повышения эффективности. Для дороги с односторонним движением и двумя полосами движения сцена среды визуального моделирования создается с использованием Pyglet. Сравнивая процесс смены полосы движения для двух стилей вождения в упрощенной сцене транспортного потока, мы изучаем влияние стиля вождения на процесс смены полосы движения и время смены полосы движения.Благодаря обучению и настройке комбинированного поперечного и продольного управления автономными транспортными средствами с разными стилями вождения в сложных дорожных условиях, автомобили могли выполнять ряд задач по вождению с учетом различий в стилях вождения. Результаты экспериментов показывают, что автономные транспортные средства могут отражать различия в стилях вождения во время смены полосы движения с одинаковой скоростью. При комбинированном поперечном и продольном управлении автономные транспортные средства демонстрируют хорошую устойчивость к разным скоростям и плотности движения на разных участках дороги.Таким образом, автономные транспортные средства, обученные с использованием предложенного метода, могут изучить политику автоматической смены полосы движения, учитывая при этом безопасность, комфорт и эффективность.
Ключевые слова: интеллектуальное транспортное средство, автоматическая смена полосы движения, стиль вождения, обучение с подкреплением, глубокий детерминированный политический градиент
1. Введение
В последние годы, в связи с постоянным ростом числа владельцев автомобилей, возникли такие проблемы, как безопасность дорожного движения и заторы на дорогах. стали более серьезными.Частые дорожно-транспортные происшествия приводят к несчастным случаям и материальному ущербу, а заторы на дорогах создают дополнительную нагрузку на городские транспортные системы. Согласно статистическим результатам, среди основных причин дорожно-транспортных происшествий, таких как водители, транспортные средства и факторы окружающей среды, несчастные случаи только по вине водителей составляют 94% ± 2,2%. Здесь аварии из-за когнитивных ошибок, ошибок принятия решений и неправильной эксплуатации составляют 41%, 33% и 11% дорожно-транспортных происшествий соответственно [1]. Таким образом, в текущем контексте интеллектуальное транспортное средство, которое может заменить человека-водителя и реализовать автоматизированное вождение, стало ключевым объектом исследования для будущего развития всей автомобильной промышленности.
В реальном процессе вождения водитель демонстрирует три основных стиля вождения: следование за автомобилем, смена полосы движения и свободное вождение [2]. Среди них процесс смены полосы движения требует, чтобы водитель обращал внимание на транспортные средства, движущиеся одновременно по текущей полосе и по целевой полосе, чтобы принимать решения и осуществлять всесторонний контроль в поперечном и продольном направлениях. Это делает решение о смене полосы движения более сложным, чем другие способы вождения. Кроме того, осознание принятия антропоморфных решений в процессе автоматизированного вождения было сложной задачей.Текущие исследования алгоритмов принятия интеллектуальных транспортных средств в основном основаны на методе разработки правил [3,4]. Этот тип метода устанавливает правила поведения, связанные с процессом вождения, с помощью расширенной «экспертной системы» и тестов, а затем проверяет их в конкретных сценариях. Однако, когда транспортные средства находятся в сложных сценариях и условиях вождения, таких как внезапные аварии, этот тип метода не может дать удовлетворительных результатов [5]. Следовательно, для работы с более сложными сценариями важной вехой является метод принятия решений для интеллектуальных транспортных средств, основанный на обучении с подкреплением.Этот метод использует самообучающийся интеллектуальный алгоритм управления, который позволяет агенту постоянно взаимодействовать с окружающей средой. Это помогает интеллектуальным автомобилям самостоятельно справляться со сложными сценариями. Обучение с подкреплением — это типичный метод самообучения, основанный на опыте и позволяющий агенту находить оптимальную стратегию для выполнения задач путем непрерывного «проб и ошибок» и обучения с обратной связью при взаимодействии с окружающей средой. Он использовался для решения практических инженерных задач, которые можно смоделировать как марковский процесс принятия решений [6].Более того, глубокое обучение с подкреплением сочетает в себе способность глубокого обучения к восприятию и способность принимать решения при обучении с подкреплением, что дает дополнительные преимущества и дает новое решение для восприятия и принятия решений в сложных сценариях. Таким образом, глубокое обучение с подкреплением стало еще одной возможной схемой для автоматической смены полосы движения и автоматического вождения интеллектуальных транспортных средств [7].
Операция смены полосы движения — это типичная проблема с временной последовательностью, в которой для завершения задачи требуется ряд действий, и выполнение текущего действия повлияет на то, может ли быть достигнута цель задачи (например,g., успешно сменив полосу движения). Для решения этого типа задач подходит обучение с подкреплением [8].
Основная цель этого исследования заключалась в разработке алгоритма глубокого детерминированного градиента политики (DDPG) для управления поведением автономных транспортных средств при смене полосы движения и для характеристики агрессивного и консервативного стилей вождения с учетом различных ожидаемых расстояний смены полосы движения, когда разработка функции вознаграждения. Кроме того, была построена упрощенная сцена транспортного потока, чтобы проверить разницу между процессом смены полосы движения и временем смены полосы движения при разных стилях вождения.Сложные сцены транспортного потока были построены для проверки того, могут ли автономные транспортные средства под управлением алгоритма принятия решений выполнять ряд задач вождения (таких как удержание полосы движения и автономная смена полосы движения), и различия сравнивались с точки зрения вознаграждения и частоты столкновений. , а также процент успеха в процессе смены полосы движения при разных стилях вождения. Наконец, мы проверили, может ли агент под управлением алгоритма обеспечить безопасность, эффективность и комфорт при смене полосы движения.
Остальная часть статьи организована следующим образом. Раздел 2 резюмирует связанные исследования. Раздел 3 знакомит с процессом реализации алгоритма DDPG и связанной с ним конструкцией MDP. В Разделе 4 объясняются программные и аппаратные средства эксперимента и изучаются связанные проблемы путем проектирования двух различных сцен движения. В Разделе 5 приведены соответствующие результаты обучения и проверки двух дорожных сцен. В Разделе 6 дается краткое изложение общего исследования и представлены направления будущей работы.
2. Сопутствующие работы
Традиционный метод автономной смены полосы движения основан на заранее определенных правилах и четко разработанных моделях. Большинство этих методов вводят виртуальные дорожки полосы движения (то есть контрольные дорожки, запланированные на пути) или серию точек пути, чтобы следовать по дорожкам в процессе смены полосы движения. Эти методы не подходят для непредсказуемых сценариев, возникающих в процессе реального вождения.
В последние годы обучение с подкреплением было разработано и улучшено.Самый базовый алгоритм обучения с подкреплением, а именно метод Q-обучения, в основном использует таблицу для записи функции ценности [9]. Это метод обучения с временной разницей, основанный на функции значения: однако этот метод обычно применим к дискретному пространству действий. Когда проблема усложняется, таблица, в которой записана функция значения, будет занимать больше места и замедлять алгоритм, что приведет к явлению «размерной катастрофы». Кретчмар улучшил алгоритм обучения с подкреплением, используя технологию параллельного обучения, что улучшило скорость работы алгоритма [10].Mnih et al. предложила модель глубокой Q-сети (DQN), объединив традиционный алгоритм Q-обучения с нейронной сетью глубокого обучения [11], где глубокая нейронная сеть интуитивно используется для аппроксимации функции политики или ценности. В 2015 году DeepMind запустил метод двойного DQN [12], который еще больше обогатил содержание DQN. По мере увеличения количества исследований, обучение с подкреплением было получено из различных областей исследований, таких как метаобучение [13,14] и обратное обучение с подкреплением [15,16].
Обладая большим количеством преимуществ и возросшей популярностью обучения с подкреплением, некоторые ученые применили этот метод для автоматического управления движением транспортных средств. Zhang et al. построили модель окружающей среды на основе данных естественного вождения [17]. Входные данные для модели состояли из данных высокой размерности (включая дорожную информацию, полученную с помощью обработки видео) и данных низкой размерности, полученных с помощью датчиков. Данные датчиков были объединены для питания нейронной сети и определения ускорения транспортного средства в текущем состоянии, включая ускорение, замедление и равномерную скорость.Фарес и Гомаа уравновешивали спрос и пропускную способность автомагистралей, контролируя количество транспортных средств, въезжающих на основную автомагистраль из зоны слияния съездов [18]. Они определили пространство состояний как трехмерное пространство, а пространство действий было определено двумя действиями: красным и зеленым. Yu et al. применил глубокую Q-сеть, которая сочетает в себе глубокую нейронную сеть и Q-обучение, к структурированным городским дорогам и изучил стратегию обгона для автобусов без водителя [19]. Идентификатор полосы движения, скорость автономного транспортного средства, скорости других транспортных средств и расстояние между автономным транспортным средством и другими транспортными средствами использовались в качестве пространства состояний.Пространство действий включало в себя действие смены полосы движения и ускорения, смены полосы движения и равномерной скорости, смены полосы движения и замедления, без смены полосы движения и ускорения, без смены полосы движения и постоянной скорости, а также без смены полосы движения и замедления. Агент был обучен и верифицирован в симуляционной среде. Хотя использование дискретного пространства действий может помочь упростить проблему, оно не способствует оптимальной политике решения практических проблем. Саллаб и др. сравнил обучение задаче удержания полосы движения в пространстве дискретных действий и непрерывного действия [20].Результаты экспериментов показали, что обе стратегии могут реализовать задачу удержания полосы движения. Тем не менее, с помощью метода обучения области непрерывного действия конечное значение рулевого управления более плавное, что соответствует требованиям комфорта водителя.
Ученые изучали проблему непрерывного пространства действия. Например, Ван и Чан проанализировали поведение при вождении транспортных средств на рампе с помощью обучения с подкреплением [21]. В этом методе пространства действий и состояний являются непрерывными, а конструкция функции вознаграждения принимает во внимание безопасность, комфорт и эффективность.Wang et al. применил алгоритм обучения с подкреплением для изучения поведения беспилотных транспортных средств при автоматическом изменении полосы движения в интерактивной среде вождения [8]. Благодаря комбинации глубокой нейронной сети и алгоритма Q-обучения был разработан аппроксиматор квадратичной Q-функции и разработана стратегия управления транспортным средством с непрерывным пространством состояний и пространством действий. Продольная скорость адаптируется к текущему состоянию транспортного потока на основе интеллектуальной модели водителя. С другой стороны, он полагается на алгоритм обучения с подкреплением для принятия решений в зависимости от текущего состояния окружающей среды.В [22] Gu et al. предложили метод быстрого адаптивного обучения для контролируемого глубокого обучения с подкреплением и реализовали путь беспилотного транспортного средства с многомерным вводом. Этот метод сочетает в себе традиционный метод управления с обратной связью с глубоким обучением с подкреплением и использует улучшенный алгоритм для обучения на TORCS. Сравнение показало, что улучшенный алгоритм более эффективен, чем простой алгоритм DDPG, с более быстрой способностью к обучению в задаче операции рулевого управления. Лю и др.использовать данные, полученные в среде моделирования, и реальные данные о вождении в качестве входных данных о состоянии агента для обучения нейронной сети, обновления параметров сети путем введения супервизионных потерь и для того, чтобы агент узнал как можно больше из реальных данных для улучшения обучения процесс [23]. В [24] Wang et al. использовали пространство непрерывного действия и алгоритм обучения с подкреплением DDPG для изучения бокового управления поведением транспортного средства при смене полосы движения. Для управления в продольном направлении использовалась интеллектуальная модель водителя с учетом относительной скорости и расстояния между агентом и движущимся впереди транспортным средством, и, наконец, было определено подходящее ускорение для следования за движущимся впереди транспортным средством.Для бокового управления обучение с подкреплением используется для определения скорости рыскания в процессе смены полосы движения на основе модуля выбора промежутка. В вышеупомянутом исследовании, хотя использовались непрерывное пространство состояний и пространство действий, проблема смены полосы движения была разделена только на продольное или поперечное управление, то есть обучение с подкреплением использовалось только для решения продольных или поперечных задач.
Текущие исследования уровня восприятия в основном проводились путем анализа изображений, полученных с помощью камер, данных радара, данных GPS и CAN, или использования относительного положения автомобиля в окружающей среде и другой информации для восприятия окружающей среды.Pan et al. использовал двухступенчатый автоматический кодер-декодер для перевода изображения, а затем использовал реальное изображение, синтезированное виртуальным изображением, в качестве входных данных для обучения агента глубокого обучения с подкреплением [25]. В [26] Jaritz et al. осуществлял сквозной контроль агента при гоночном вождении. Рулевое управление, дроссельная заслонка, ножной тормоз и ручной тормоз контролировались с использованием информации об изображении, полученной передней камерой, а алгоритм асинхронного преимущества «актер-критик» (A3C) использовался для тренировки в игре World Rally Championship 6 (WRC6).В [27] An et al. считал координаты положения и скорости агента и других транспортных средств входными данными в пространство состояний для обучения. В своем исследовании следующего поведения двух транспортных средств Zhu et al. выбрал скорость, относительное расстояние и относительную скорость двух транспортных средств в пространстве состояний [28]. В [20] Саллаб и др. реализовали восприятие окружающей среды с помощью датчиков, таких как камера, лидар и радар миллиметрового диапазона, и данные были объединены с использованием нескольких датчиков для обучения задаче удержания полосы движения в TORCS.Другое исследование было проведено по обнаружению краев структурированных дорог на основе только лидара. В [29] Wang et al. предложил метод обнаружения краев структурированных дорог на основе надежного 3D-лидара.
3. Постановка задачи
В этом исследовании предлагаемый непрерывный автоматизированный метод смены полосы движения, основанный на алгоритме DDPG, полностью зависит от данных, измеренных однолинейным лидарным датчиком в среде моделирования. Данные включают расстояние между агентом и окружающими транспортными средствами, а также границы дорог во всех направлениях.На основе этих данных формируется зона безопасного вождения в процессе смены полосы движения. И пространство состояний, и пространство действий являются непрерывными, а функция вознаграждения учитывает безопасность, комфорт и эффективность. показывает структуру автоматической смены полосы движения, основанную на предложенном алгоритме DDPG. В этом разделе мы в основном представляем методы, использованные в исследовании для решения проблемы автоматической смены полосы движения. Это включает в себя базовую теорию обучения с подкреплением, алгоритм DDPG и дизайн пространства состояний, пространства действий, функции вознаграждения и структуры нейронной сети для автоматической смены полосы движения.
Структура автоматической смены полосы движения на основе алгоритма глубокого детерминированного градиента политики (DDPG).
3.1. Обучение с подкреплением
Обучение с подкреплением — это метод, с помощью которого можно получить оптимальную политику за счет непрерывного взаимодействия между агентом и средой и изменения действия на основе обратной связи среды с действием. Как показано в, агент берет свою собственную информацию в текущей среде как состояние s∈S и генерирует действие a∈A на основе текущего состояния s.После выполнения действия агент получает значение вознаграждения R (s, a) и следующее состояние s∈S ‘, а также получает совокупный доход посредством непрерывной итерации до тех пор, пока не будет найдена оптимальная политика π ∗ [30].
Базовая структура обучения с подкреплением.
3.2. Алгоритм DDPG
Алгоритм DQN добился успеха в Atari. Однако он может решить только проблему дискретного пространства действий. Он не может выводить функцию значения действия каждого действия для непрерывного пространства действий.Более того, многие проблемы управления в реальной жизни часто требуют, чтобы пространство действия было непрерывным. Если пространство непрерывного действия просто разделено на множество почти непрерывных прерывистых пространств, быстрое увеличение размеров действия затруднит обучение нейронной сети для схождения. Поэтому, основанный на алгоритме DQN, алгоритм DDPG не только использует воспроизведение опыта и независимые методы целевой сети, но также представляет преимущества алгоритма DQN непосредственно в области непрерывного пространства действий.Алгоритм DDPG подробно описан ниже:
| Алгоритм 1 Алгоритм DDPG |
| Произвольно инициализировать критическую сеть Q (s, a | θQ) и субъект μ (s | θμ) с весами θθ и θμ Инициализировать целевую сеть Q ′ и μ ′ с весами θQ ′ ← θQ, θμ ′ ← θμ Инициализировать буфер воспроизведения R для эпизода = 1, M do Инициализировать случайный процесс N для исследования действия Получить начальное состояние наблюдения s1 для t = 1, T до Выбрать действие at = μ (st | θμ) + Nt в соответствии с текущей политикой и шумом исследования Выполнить действие и наблюдать за вознаграждением rt и наблюдать за новым состоянием st + 1 Сохранить переход Выбрать случайную мини-серию из N переходов Установить yi = ri + γQ ′ (si + 1, μ ′ (si + 1 | θμ ′) | θQ ′) Обновить критика, минимизируя потери: L = 1N∑i (yi − Q (si, ai | θQ) 2) Обновить политику актора, используя градиент с выборкой: ∇θoμμ | si≈1N∑i∇aQ (s, a | θQ) | s = si, a = μ (si) ∇θμμ (s | θμ) | s = si Обновите целевые сети: θQ ′ ← τθQ + (1 − τ) θQ ′ θμ ′ ← τθμ + (1 − τ) θμ ′ конец для конец для |
Алгоритм DDPG [31] принимает структуру алгоритма «актер – критик», и добавляет идею воспроизведения опыта и случайной выборки.Также рассматривается процесс создания независимой целевой сети в DQN. Он разработан на основе DPG, поэтому алгоритм можно рассматривать как интеграцию Actor – Critic, DQN и DPG. Структура алгоритма «субъект – критик» объединяет теорию поиска политики и аппроксимации функции ценности и делится на две части: сеть-субъект и сеть-критик. DDPG состоит из двух основных сетей и двух целевых сетей, как показано на.
Фреймворк нейронной сети.
Входом в сеть-актер в основной сети является текущее состояние s, а на выходе — действие a, выбранное в зависимости от политики μ (st | θμ). Входом в критическую сеть в основной сети является текущее состояние s и фактическое выходное действие a, а на выходе — вычисленное текущее значение Q, то есть Q (s, a | θQ). Это значение Q обновляет вес сети-исполнителя в основной сети через градиент политики, а также используется для вычисления функции потерь. Функция обновления параметров сети-исполнителя в основной сети выглядит следующим образом:
∇θμμ | st≈1N∑t∇aQ (s, a | θQ) | s = st, a = μ (st) ∇θμμ ( s | θμ) | s = st
(1)
где N — количество случайно выбранных выборок, Q (s, a | θQ) — функция значения действия, а μ (s | θμ) — детерминированная политика.
Входом в сеть-актер в целевой сети является следующее состояние s ‘, а выходом — действие a’, выбранное на основе политики μ ‘(st + 1 | θμ’). Входом в сеть критиков в целевой сети является следующее состояние s ‘, а действие a’ выводится через сеть-актер. Результатом является соответствующее значение Q ′ целевой сети, а именно Q ′ (st + 1, μ ′ (st + 1 | θμ ′) | θQ ′). Вычисляя функцию потерь между этим значением Q ‘и значением Q, вычисленным в основной сети, алгоритм может обновлять вес критической сети в основной сети, минимизируя функцию потерь.
yt = r (st, at) + γQ ′ (st + 1, μ (st + 1 | θμ ′) | θQ ′)
(2)
L = 1 / N ∗ ∑i = t (yt −Q (st, at | θQ) 2)
(3)
Функции (2) и (3) представляют собой формулы расчета для значения вознаграждения и функции потерь, соответственно, где yt — текущее реальное значение вознаграждения, r (st, at) — текущее значение вознаграждения, γ — коэффициент дисконтирования будущего значения вознаграждения, Q ′ (st + 1, μ (st + 1 | θμ ′) | θQ ′) — функция значения состояния действия, соответствующая к следующему моменту L — функция потерь, а Q (st, at | θQ) — функция значения действия в текущий момент.
Метод независимой целевой сети включает использование основной сети для одношагового обучения и итеративного обновления, а затем присвоение параметров основной сети независимой целевой сети после определенного количества итераций. В отличие от метода, используемого в DQN для назначения основных сетевых параметров целевой сети на определенном количестве шагов, DDPG использует небольшое количество обновлений параметров целевой сети на каждом шаге. После обучения небольшого пакета данных с емкостью N, алгоритм мягкого обновления используется для обновления параметров целевой сети:
θQ ′ ← τθQ + (1 − τ) θQ ′
(4)
θμ ′ ← τθμ + (1 − τ) θμ ′
(5)
3.3. Проектирование структуры сети «субъект – критик»
Алгоритм DDPG, используемый в этом исследовании, зависит от типичной структуры алгоритма «субъект – критик», которая включает две нейронные сети: сеть-субъект и сеть-критик. По сравнению с обычным алгоритмом обучения с подкреплением, алгоритм DDPG больше сосредоточен на проектировании и оптимизации структуры сети «субъект – критик». Учитывая, что данные обнаружения в реальном времени от однолинейного лидара используются в качестве исходных входных данных для глубокого обучения с подкреплением для решения проблемы смены полосы движения автономных транспортных средств, данные лидара являются низкоразмерными, в отличие от данных изображений, собранных с помощью камера.Суть обучения с подкреплением в решении задачи автоматической смены полосы движения заключается в нахождении оптимального пути для смены полосы движения транспортного средства. Алгоритм DDPG использует нейронную сеть с глубоким обучением для выражения уравнения траектории, а с помощью метода обучения с подкреплением процесс принятия решений агентом обновляется в направлении максимизации значения функции вознаграждения. Теоретически нейронной сети с одним скрытым слоем достаточно для описания любой функции: поэтому мы выбираем полностью связанную нейронную сеть в качестве базовой сетевой структуры сети-исполнителя и сети-критика.
Исходные данные измерений нельзя напрямую использовать в качестве входных данных при обучении нейронных сетей. Как правило, чтобы устранить различия в размерах и различиях между разными данными, исходные данные должны пройти предварительную обработку. Следовательно, данные равномерно отображаются в интервал [0, 1] с использованием минимальной – максимальной нормализации. Актор-сеть принимает предварительно обработанные данные в качестве входных, соединяется с полностью подключенным слоем и использует нелинейную функцию tanh в качестве функции активации.Конечный результат сети акторов представляет собой управление, ускорение и замедление агента. Конечный выходной диапазон угла поворота рулевого колеса составляет от -1 до 1 с помощью функции активации, где -1 представляет максимальный левый поворот, а 1 представляет максимальный правый поворот. Теоретически ускорение и замедление следует контролировать независимо. Следовательно, сигмовидная функция используется для сопоставления действия непосредственно с диапазоном [0, 1], где 0 указывает на отсутствие операции, а 1 указывает на максимальное ускорение или замедление.Однако на практике, во-первых, водитель-человек не будет нажимать на газ и тормозить одновременно при нормальной работе транспортного средства. Во-вторых, если ускорение и замедление выбираются независимо, может показаться, что агент будет замедляться при ускорении, чтобы получить меньшее результирующее ускорение, что не рекомендуется с точки зрения экономии топлива и безопасности. С помощью приведенного выше анализа мы, наконец, выводим управление ускорением и замедлением в качестве параметра через функцию tanh, где -1 указывает максимальное замедление, а 1 указывает максимальное ускорение.Сеть-критик объединяет предварительно обработанные данные с действием выхода сети-исполнителя в качестве входа, подключается через полностью подключенный уровень, использует выпрямленный линейный блок в качестве функции активации во втором скрытом слое и, наконец, выводит Q ценность. и представить структуру сети акторов и сети критиков. Вход в сеть-актер — это количество характеристик в пространстве состояний, тогда как вход в сеть-критик — это сумма характеристик состояния и действий.Обе сети имеют два полностью связанных слоя между входным и выходным слоями, и количество нейронов в первом полностью соединенном слое равно 150, а количество нейронов во втором слое равно 20. Выходные данные сети-актора представляют собой управление. угол поворота колеса и ускорение агента, тогда как выходные данные сети критиков представляют соответствующие значения Q .
Таблица 1
| Имя | Размер | Аннотация |
|---|---|---|
| Входной уровень | n | Пространство состояний |
| Полностью связанный слой 1 | 03 150 × слой 1 | |
| Полностью связанный слой 2 | 20 × 1 | Количество нейронов в слое 2 |
| Выходной слой | 2 × 1 | {θw, a} |
Таблица 2
Структура критической сети.
| Имя | Размер | Аннотация |
|---|---|---|
| Входной слой | n + 2 | Пространство состояний + действие |
| Полностью связанный слой 1 | 03 15020 × 1 Количество нейронов в слой 1 | |
| Полностью связанный слой 2 | 20 × 1 | Количество нейронов в слое 2 |
| Выходной слой | 1 × 1 | Q -значения |
3.4. Построение среды моделирования
Без учета влияния дорожных знаков, погодных условий и других факторов внимание водителя в основном сосредоточено на геометрической информации о дороге и объектах, движущихся по дороге в процессе смены полосы движения. Геометрическая информация о дороге в основном включает кривизну дороги и расположение полосы движения. К движущимся объектам на дороге в основном относятся транспортные средства, движущиеся по полосе для транспортных средств (включая людей, участвующих в дорожном движении, и немеханические транспортные средства на перекрестках дорог).Поэтому в процессе построения среды автоматической смены полосы движения мы учитываем линию полосы движения, линию границы полосы движения и транспортные средства в каждой полосе движения. Необходимые условия для безопасного вождения автономных транспортных средств: (1) транспортное средство движется по полосе дороги, (2) поддерживается безопасное расстояние от других транспортных средств. Без учета пешеходов, немоторных транспортных средств и других участников дорожного движения среда моделирования включает несколько ключевых элементов, таких как граница полосы движения, осевая линия дороги и окружающие движущиеся транспортные средства.На основании вышеуказанных требований мы создаем физическую среду на основе Python, используем модуль Pyglet для визуализации среды моделирования и получаем в реальном времени данные об обнаруженной полосе движения и окружающих транспортных средствах с помощью лидара (производитель, город, государство, если в США, страна). показывает результат визуализации среды моделирования.
Визуальный результат моделирования среды.
3.5. State Space Design
После всестороннего рассмотрения всех аспектов мы, наконец, разместили смоделированный однолинейный лидар в автономном транспортном средстве в среде моделирования для обнаружения и восприятия информации о движении окружающих транспортных средств и линий дорог с обеих сторон.Автономное транспортное средство может определять свое относительное положение на основе восприятия, чтобы получить информацию о расстоянии между ним и окружающими его транспортными средствами и полосами движения с обеих сторон, что позволяет лучше выполнять ряд задач вождения, таких как удержание полосы движения и автоматическая смена полосы движения. Следовательно, в этом исследовании пространство состояний MDP определяется как состояние расстояния Dlane полосы движения, обнаруженной лидаром, и состояние расстояния Dvehicle между агентом и другими транспортными средствами вокруг него. Чтобы полностью воспринимать информацию о движении окружающих транспортных средств, как показано на, дальность обнаружения однолинейного лидара определяется как [0 °, 360 °].Дальность делится на 60 равных частей (что может гарантировать, что транспортное средство в пределах диапазона обнаружения всегда будет иметь хотя бы одно возвращаемое значение расстояния во время процесса рулевого управления транспортным средством), а максимальная дальность обнаружения лидара составляет 50 м. Пространство состояний определяется как:
State = {Dlane, Dvehicle}
(6)
Пространство состояний автоматической смены полосы движения.
Среди них пространство состояний содержит 61 значение данных расстояния Dlane между полосами движения, обнаруженных лидаром, и расстояния Dvehicle от окружающих транспортных средств.
3.6. Дизайн пространства действий
Пространство действий — это сумма действий, которые агент может предпринять с точки зрения поведения при смене полосы движения. Чтобы обеспечить безопасность, эффективность и комфорт при смене полосы движения, необходимо контролировать угол поворота рулевого колеса, открытие дроссельной заслонки и давление на педаль тормоза. Это повлияет на угол наклона передних колес, ускорение и другие параметры движения. Что касается поперечного управления, учитывая, что входными данными для кинематической модели транспортного средства является угол поворота передних колес, структура системы рулевого управления упрощается, и передаточное отношение угла системы рулевого управления предполагается равным 17: 1.Регулировка положения и ориентации агента в окружающей среде осуществляется путем управления углом поворота рулевого колеса. Ориентируясь на алгоритм DDPG, который может представлять непрерывные действия, мы используем пространство непрерывных действий в качестве диапазона управления углом поворота рулевого колеса. Пространство действий в боковом аспекте определяется как:
Автоматическое изменение полосы движения транспортных средств требует согласования взаимосвязи между рулевым управлением и скоростью, чтобы обеспечить быстрое и безопасное выполнение задачи смены полосы движения.Помимо управления углом поворота рулевого колеса транспортного средства, пространство действия должно также контролировать и регулировать продольную скорость транспортного средства, поэтому пространство продольного действия устанавливается на нормированное продольное ускорение a. Здесь a∈ [-1, 1], где отрицательное число указывает на замедление, ноль указывает на постоянную скорость, а положительное число указывает на ускорение.
Подводя итог, комплексное пространство действий, учитывающее управление углом бокового рулевого колеса и управление продольной скоростью, можно определить как:
3.7. Дизайн функции вознаграждения
Функция вознаграждения связана с тем, может ли агент успешно выполнить задачу в обучении с подкреплением, а также с некоторыми требованиями к производительности, которые необходимо выполнить на основе выполнения задачи. Следовательно, разумное проектирование функции вознаграждения — это ключ, который поможет агенту выполнить задачу смены полосы движения и выполнить требования к производительности. Функция вознаграждения в основном основана на безопасности, комфорте и эффективности:
Безопасность является наиболее важным фактором оценки в процессе автоматической смены полосы движения интеллектуальных транспортных средств.Безопасность следует рассматривать как предпосылку и первоочередное внимание во всем процессе смены полосы движения, чтобы избежать любых дорожно-транспортных происшествий и потери имущества. В этом исследовании конструкция функции вознаграждения для обеспечения безопасности в основном рассматривается с двух сторон: предотвращение столкновения между агентом и другими транспортными средствами и установка различных ожидаемых расстояний для смены полосы движения для представления различных стилей вождения.
Во-первых, считается, что агент должен избегать столкновений с окружающими транспортными средствами и давать соответствующую отрицательную награду в случае столкновения.Конкретный дизайн выглядит следующим образом:
Cflag = {1, если collision0, иначе
(10)
где kc — весовой коэффициент вознаграждения за столкновение между агентом и другими транспортными средствами, k c <0, а Cflag - метка обнаружения столкновения между агентом и другими транспортными средствами.
Впоследствии следует учитывать, что разные стили вождения могут быть охарактеризованы путем установки различных ожидаемых расстояний для смены полосы движения от движущихся впереди транспортных средств.Ожидаемое расстояние для смены полосы движения принимается в качестве порогового значения, поэтому, когда расстояние между агентом и движущимся впереди транспортным средством меньше порогового значения, величина штрафа будет постепенно увеличиваться с увеличением желаемой дистанции смены полосы движения, таким образом улучшая охрана. Конкретный дизайн выглядит следующим образом:
Rdistance = kt | d − ddes |
(11)
где kt — весовой коэффициент вознаграждения во время смены полосы движения, ddes — ожидаемое расстояние при смене полосы движения между агентом и движущимся впереди транспортным средством, kt <0.Устанавливая различные ожидаемые расстояния для смены полосы движения, мы можем использовать функцию вознаграждения для представления различных стилей вождения.
У водителей разные стили вождения при смене полосы движения, например, консервативный и агрессивный. Консервативный стиль вождения — это когда транспортное средство меняет полосу движения только тогда, когда оно находится на большом расстоянии от впереди идущего автомобиля, а агрессивный стиль вождения — это когда транспортное средство меняет полосу движения, даже когда расстояние до впереди идущего автомобиля очень маленький.Как упоминалось выше, установив ddes = 10 м, мы можем обучить агента менять полосу движения как можно скорее, когда расстояние от впереди идущего автомобиля меньше 10 м, что характеризует консервативный стиль вождения. При установке ddes = 0 м обучающий агент начинает менять полосу движения только тогда, когда он собирается наехать на впереди идущий автомобиль, что характеризует агрессивный стиль вождения.
Подводя итог, можно сказать, что функция вознаграждения, учитывающая безопасность агентов, может быть выражена следующим образом:
Rsecurity = Rcollision + Rdistance
(12)
При рассмотрении комфорта езды водителей и пассажиров, боковых и продольных аспектов автономного движения транспортного средства следует в полной мере учитывать.Угловое значение переднего колеса не должно слишком быстро меняться при управлении поперечным движением, поэтому угловая скорость рулевого колеса используется в качестве показателя для оценки комфорта. Угловая скорость рулевого колеса — это скорость изменения угла поворота рулевого колеса. Чем ниже угловая скорость рулевого колеса, тем плавнее процесс смены полосы движения транспортного средства, и пассажиры будут чувствовать больший комфорт при движении. Награда за комфорт при боковом управлении может быть выражена следующим образом:
где kw — весовой коэффициент вознаграждения за угловую скорость рулевого колеса, θw˙ — угловая скорость рулевого колеса агента, kw <0.
Чтобы избежать значительного изменения ускорения во время управления продольным движением автономных транспортных средств, рывок используется в качестве показателя для оценки комфорта. Рывок отражает скорость изменения ускорения. Чем меньше рывок при смене полосы движения, тем плавнее ускорение автомобиля, обеспечивая тем самым больший комфорт езды. Функция вознаграждения за учет комфорта агента во время вертикального контроля выглядит следующим образом:
где a˙ — рывок агента, а ka — весовой коэффициент вознаграждения за рывок, ka <0.
В итоге, функция вознаграждения с учетом комфорта агента составляет:
Rcomfort ″ = кВт × θw˙ + ka × a˙
(15)
В процессе смены полосы движения интеллектуальных транспортных средств эффективность всего Также следует учитывать процесс смены полосы движения. Это необходимо для того, чтобы агент мог быстро перейти с текущей полосы на целевую, сохраняя при этом необходимую скорость движения во время всего процесса смены полосы движения, чтобы избежать увеличения времени, необходимого для смены полосы движения.
Функция вознаграждения, которая позволяет агенту быстро переходить с текущей полосы на целевую, разработана следующим образом:
Эффективность = kk (| TL − y | + k1 (2 − LN2) (1 − LN) | TL −y |)
(16)
TL = {120, если LN = 1160, если LN = 2140, иначе LN = 0
(17)
где TL — целевая полоса, LN — номер полосы, а значения 0, 1 и 2 указывают, что текущее положение агента не в зоне движения, в полосе 1 (слева) и в полосе 2 ( справа) соответственно.y — координата бокового положения агента, а kk и k1 — постоянные члены, где kk <0 и k1> 0. Для уравнения (15) и в сочетании с, когда агент находится на дорожке 1 или дорожке 2, это соответствует LN = 1 или LN = 2, соответственно, и k1 (2 − LN2) (1 − LN) | TL − y | в этой формуле равен нулю. Кроме того, знаменатель (2-LN) / 2 должен гарантировать, что в обоих случаях будет дано одно и то же вознаграждение (независимо от того, покидает ли агент полосу слева или справа). Когда LN = 0, т. Е. После того, как агент покидает полосу движения и входит в зону, не предназначенную для вождения, k1 (2-LN2) (1-LN) | TL-y | не равно нулю, но увеличивает общее отрицательное значение вознаграждения.
Учитывая, что скорость агента во всем процессе смены полосы движения не может быть слишком низкой, допустимая минимальная скорость vmin ограничена, а соответствующая функция вознаграждения разработана следующим образом:
Lflag = {1, v (19) где kl — весовой коэффициент вознаграждения агента за ограничение скорости, kl <0, а Lflag - метка обнаружения ограничения скорости агента. Таким образом, функция вознаграждения, учитывающая эффективность агента во всем процессе смены полосы движения, выглядит следующим образом: Refficiency ′ = Refficiency + Rspeed (20) На основе анализа и рассмотрения безопасности, комфорта, и эффективности, общая функция вознаграждения агента под совместным поперечным и продольным контролем может быть выражена следующим образом: R ′ = Rsecurity + Rcomfort ″ + Refficiency ′ (21) В этом исследовании среда моделирования основана на физической среде, созданной с помощью Python, а сценарии визуализируются с помощью Pyglet. В среде моделирования мы используем математический метод пересечения двух векторов в 2D-плоскости для вычисления евклидова расстояния агента от полосы движения и других транспортных средств во всех направлениях. Модель велосипеда в динамике транспортного средства используется для описания основного закона движения агента.Кроме того, добавлено обнаружение столкновения агента с другими транспортными средствами. Наконец, мы обучаем агента самостоятельно менять полосу движения на односторонней двухполосной дороге, где длина моделируемой дороги составляет 100 м, ширина полосы движения — 3,75 м, длина кузова автомобиля — 5 м, и шириной 2 м. представляет программную и аппаратную среду, на которую агенты полагаются в процессе обучения. Программно-аппаратная среда. Чтобы проверить разницу между процессом смены полосы движения и временем смены полосы движения для агентов с разными стилями вождения (консервативным и агрессивным), мы настроили упрощенную сцену дорожного движения, т.е.е. влияние тыловых транспортных средств пока не учитывается. Мы устанавливаем только передний автомобиль на целевую полосу и текущую полосу, чтобы сформировать типичную сцену. Сначала модель обучается, чтобы агент мог выполнять ряд задач вождения, таких как смена полосы движения, а затем исследует влияние различных стилей вождения на процесс смены полосы движения и обеспечение комфорта. На основе требований к задаче, представленных в этом разделе, сцена дорожного движения обучающей модели до некоторой степени упрощена, и учитывается только влияние транспортного средства перед агентом.перечисляет некоторые конкретные параметры алгоритма DDPG, используемые в процессе обучения, такие как скорость обучения, максимальное количество эпизодов, максимальное количество шагов и весовой коэффициент функции вознаграждения. Всю задачу вождения можно разделить на следующие три части: Когда условие смены полосы движения не достигается, агент остается на текущей полосе движения; После достижения условия смены полосы движения агент автоматически меняет полосу движения; После завершения смены полосы движения агент остается на новой полосе. Параметры обучения модели. Исходя из требований экспериментальной задачи и дизайна экспериментальной схемы, модельное обучение проводилось в общей сложности для 600 эпизодов, и для каждого эпизода обучения было задано 100 шагов.На односторонней двухполосной дороге начальная скорость агента 30 км / ч, скорость фронта 20 км / ч, скорость левого фронта 28 км / ч. В исходной позиции расстояние между агентом и передним транспортным средством в текущей полосе движения составляет 20 м. Чтобы максимально смоделировать реальную сцену вождения и транспортный поток, мы выполнили исследование для случая, когда транспортные средства находятся впереди и сзади окружающей целевой полосы и текущей полосы.Агенты, представляющие разные стили вождения, выполняют ряд задач вождения, таких как смена полосы движения и адаптивная регулировка скорости, посредством совместного поперечного и продольного управления, так что агент может адаптироваться к сложному динамическому потоку движения и сравнивать различия между разными стилями вождения. Чтобы агент мог справляться с различными условиями потока трафика в процессе обучения, в экспериментальной схеме спроектирована динамическая сцена трафика. На этапе обучения среда моделирования автоматически регулирует положение автомобилей в передней и задней части левой полосы движения.В то же время, как и ранее, агрессивный и консервативный стили вождения призваны различать и сравнивать влияние стилей вождения на весь процесс смены полосы движения. перечисляет параметры обучения, используемые в процессе обучения (остальные параметры подробно описаны в). Экспериментальная задача состоит из двух частей: Выполнить задание по смене полосы движения в динамической дорожной обстановке; После завершения смены полосы движения отрегулируйте скорость, чтобы адаптироваться к текущему потоку движения по полосе. Боковые и продольные параметры тренировки. Исходя из требований экспериментальной задачи и экспериментальной схемы, агенты, представляющие два стиля вождения, проведут 900 эпизодов обучения с 60 шагами в эпизоде. На односторонней двухполосной дороге начальная скорость агента — 40 км / ч, скорость переднего автомобиля — 20 км / ч, скорость заднего автомобиля — 22 км / ч, скорость движения левый передний автомобиль составляет 28 км / ч, а скорость левого заднего автомобиля — 25 км / ч.В исходном положении расстояние между агентом и передней машиной составляет 13 м, а расстояние между агентом и задней машиной — 8 м. показывает среднее всех типов изображений вознаграждения агента в процессе обучения, включая общее вознаграждение, вознаграждение за безопасность, вознаграждение за комфорт и вознаграждение за эффективность. a показывает, что вознаграждение имеет тенденцию к снижению в начале обучения, потому что агент постоянно балансирует взаимосвязь между исследованием и использованием.При непрерывном обучении среднее вознаграждение постепенно сходится, указывая на то, что агент может изучить политику смены полосы движения, чтобы максимизировать функцию вознаграждения. b – d показывает среднее вознаграждение за безопасность, комфорт и эффективность в тренировочном процессе, соответственно, все из которых увеличиваются, а затем постепенно сходятся. Это указывает на то, что при разработке функции вознаграждения, учитывающей безопасность, комфорт и эффективность, агент может обеспечить безопасную смену полосы движения без каких-либо столкновений.Кроме того, значительно повышается комфорт, а задача по смене полосы движения решается эффективно. Вознаграждение за обучение модели: ( a ) общее среднее вознаграждение, ( b ) среднее вознаграждение за безопасность, ( c ) среднее вознаграждение за комфорт, ( d ) среднее вознаграждение за эффективность. В этом разделе представлены различия в поведении агентов при смене полосы движения под управлением разных стилей вождения, а также сравниваются процессы смены полосы движения агентов с разными стилями вождения путем настройки идентичной сцены для определить различия.Затем анализируется разовое вознаграждение агента с разными начальными скоростями в процессе смены полосы движения при консервативном стиле вождения, и сравниваются изменения угловой скорости рулевого колеса с учетом и без учета комфорта, чтобы проверить, действительно ли обеспечивается комфортность процесса смены полосы движения. показывает графики положения трека агента, завершающего процесс смены полосы движения при различных стилях вождения. а показывает, что при агрессивном стиле вождения агент начинает менять полосу движения на 28 м и завершает смену полосы движения на 45 м.При консервативном стиле вождения, показанном на рисунке b, агент начинает менять полосу движения на 18 м и завершает смену полосы на 34 м. Простой расчет показывает, что процесс смены полосы движения агента проходит на 17 м в направлении x при агрессивном стиле вождения и 16 м в направлении x при консервативном стиле вождения. При условии, что скорость агента одинакова, время смены полосы движения такое же. Однако в той же сцене и с той же скоростью позиция смены полосы движения агента с агрессивным стилем вождения на 10 м позже, чем у агента с консервативным стилем вождения в тех же условиях, и время смены полосы движения равно даже позже. Следы смены полосы движения при разных стилях вождения в одной и той же сцене: ( a ) агрессивный стиль вождения, ( b ) консервативный стиль вождения. Принимая во внимание процесс смены полосы движения, выполняемый агентом при консервативном стиле вождения, следующие данные сравниваются и проверяются на разных скоростях. Как показано на рисунке, агенты проводят эксперименты по смене полосы движения на скоростях 25, 30 и 35 км / ч. Как показано, награда агентов за один эпизод на разных скоростях имеет тенденцию к увеличению.показаны результаты проверки изменения угловой скорости рулевого колеса с учетом и без учета вознаграждения за комфорт. Целью вознаграждения за комфорт является уменьшение угловой скорости рулевого колеса. По сравнительной кривой с учетом и без учета комфорта на рисунке можно ясно увидеть, что угловая скорость рулевого колеса ниже, а общая кривая стремится к 0 при рассмотрении вознаграждения за комфорт, что указывает на комфорт в полосе движения. процесс изменений был эффективно обеспечен.Результаты проверки показывают, что агент может выполнить задачу по вождению и удовлетворить требования безопасности, комфорта и эффективности, используя модель, основанную на обучении DDPG, и разработанную функцию вознаграждения на разных скоростях. Награды за один эпизод с разной скоростью. Угловая скорость рулевого колеса. показывает среднее вознаграждение агентов с двумя разными стилями вождения под совместным поперечным и продольным контролем, включая общее среднее вознаграждение, среднее вознаграждение за комфорт и вознаграждение за среднюю эффективность. Награды за разные стили вождения: ( a ) общая средняя награда, ( b ) средняя награда за эффективность и ( c ) средняя награда за комфорт. a показывает, что общая средняя награда за оба стиля вождения постоянно колеблется в начале тренировки. Однако при непрерывном изменении количества тренировочных эпизодов средние награды за консервативный и агрессивный стили вождения имеют тенденцию сходиться после 600 эпизодов, доказывая, что ряд задач вождения, таких как автоматическая смена полосы движения и удержание полосы движения, может быть достигнута. с этими стилями вождения на более позднем этапе.Агент может изучить политику смены полосы движения, чтобы максимизировать ценность функции вознаграждения. С другой стороны, кривая функции вознаграждения агента, представляющего консервативный стиль вождения, очевидно, более сходна, плавнее и быстрее, чем у агрессивного, на протяжении всего процесса и на более поздних этапах, что указывает на то, что агент с консервативным стилем вождения более эффективен. эффективен при выполнении задач по вождению. В одной и той же сцене смены полосы движения из-за разного времени смены полосы движения для двух стилей вождения есть некоторые различия в наградах за эффективность и комфорт.Например, при консервативном стиле вождения агент может достичь целевой полосы как можно скорее, поэтому это более эффективно, поскольку время смены полосы движения наступает раньше. b показывает, что общая кривая функции вознаграждения консервативного стиля вождения более гладкая и сходящаяся, чем кривая агрессивного стиля вождения, что указывает на то, что процесс смены полосы движения агента консервативного стиля вождения более эффективен. По сравнению со средней функцией вознаграждения за комфорт, показанной в c, комфорт двух стилей вождения постоянно улучшается и оптимизируется, тогда как кривая функции вознаграждения при консервативном стиле вождения более плавная и сходящаяся.Независимо от стиля вождения, a – c демонстрирует растущую тенденцию и постепенное сближение, указывая на то, что в рамках поощрительной функции безопасности, комфорта и эффективности агент может обеспечить безопасную смену полосы движения без столкновения. Кроме того, значительно повышается комфорт, и задача смены полосы движения может быть выполнена эффективно. a показывает, что частота столкновений агента с консервативным стилем вождения снижается быстрее. Показатели успешности и столкновений при различных стилях вождения: ( a ) частота столкновений, ( b ) частота успешных попыток. Например, в 600-м эпизоде частота столкновений консервативного агента примерно на 15% ниже, чем у агрессивного агента, и в конечном результате частота столкновений консервативного агента примерно на 10% ниже, чем у агрессивного агента. агрессивный агент. b показывает, что вероятность успеха консервативного агента при смене полосы движения увеличивается быстрее, и тенденция к росту более очевидна. Показатель успешности смены полосы движения у агрессивного агента вначале более изменчив, и в конечном результате показатель успешности смены полосы движения у консервативного агента примерно на 10% выше, чем у агрессивного агента, что указывает на то, что консервативный агент может лучше выполнять автоматическую смену полосы движения и другие задачи вождения.Как показано на фиг.4, показатели успешности смены полосы движения для двух стилей продолжают увеличиваться с увеличением количества итераций, тогда как частота столкновений уменьшается с итерацией. Обе кривые показывают, что обученный агент обеспечивает безопасность в процессе смены полосы движения, в то время как безопасность и вероятность успеха при консервативном стиле вождения выше. В этом исследовании мы проверили поведение агента при смене полосы движения в сложных сценариях динамического транспортного потока со следующих аспектов: (1) вознаграждение агентов за один эпизод на разных начальных скоростях, (2) Однократное вознаграждение агентов при разных средних скоростях на участке дороги. (3) Влияние вознаграждения за комфорт на угловую скорость рулевого колеса и рывок. a показывает сравнение вознаграждений агентов с начальной скоростью 30, 40 и 50 км / ч. b показывает сравнение преимуществ окружающего дорожного движения, движущегося со средней скоростью 30, 40 и 50 км / ч соответственно. Очевидно, что кривые вознаграждения агентов показывают тенденцию к увеличению при разных начальных скоростях или разных средних скоростях на участке дороги. Общая тенденция кривой вознаграждения является наибольшей, когда средняя скорость транспортного потока на окружающем участке составляет 50 км / ч.Причем из рисунка видно, что чем больше средняя скорость потока трафика в определенном диапазоне, тем больше вознаграждение для агента. Награды агентов за один эпизод в разных сценариях: ( a ) разные начальные скорости и ( b ) разные средние скорости на участке дороги. a, b показывает результаты сравнительной проверки угловой скорости и рывка агента, соответственно, с учетом и без учета вознаграждения за комфорт. Сравнительные результаты с учетом и без учета вознаграждения за комфорт: ( a ) угловая скорость рулевого колеса и ( b ) рывок. Целью вознаграждения за комфорт является минимизация рывков и угловой скорости рулевого колеса. Сравнивая кривые с вознаграждением за комфорт и без него, мы видим, что агент с вознаграждением за комфорт превосходит агента без вознаграждения за комфорт с точки зрения угловой скорости рулевого колеса и рывка в целом. Приведенные выше результаты проверки показывают, что агент обладает хорошей устойчивостью при разных скоростях и разных средних скоростях на участке дороги, а модель, основанная на обучении DDPG и разработанной функции вознаграждения, может соответствовать требованиям безопасности, комфорта и эффективности. ACK NO WL EDG ME NTS Авторы благодарят Альберта Ризальди за его ценный вклад в определение безопасного расстояния. . Эта работа частично финансируется Федерального министерства экономики и технологий Германии в рамках исследовательской инициативы Ko-HAF (https://www.ko-haf.de/). СПРАВОЧНАЯ ИНФОРМАЦИЯ [1] Бюро статистики транспорта, «Данные о безопасности транспортных средств», Вашингтон, округ Колумбия.C .: Управление исследований и инновационных технологий — tration, Министерство транспорта США, Tech. Респ., 2015. [Он- линия]. Доступно: http://www.rita.dot.gov/bts/sites/rita.dot.gov.bts/files / публикаций / национальная транспортная статистика / html / table 02 17.html [2] N. Калра и С.М. Паддок, «Безопасное движение: сколько миль из потребуется, чтобы продемонстрировать надежность автономного транспортного средства?» Транспортные исследования, часть A: Политика и практика, т.94, pp. 182– 193, 2016. [3] Т. Фрайхард, «Краткая статья о безопасности движения», Proc. IEEE Int. Конф. по робототехнике и автоматизации, 2007, с. 1140–1145. [4] С. Петти и Т. Фрайхард, «Планирование безопасного движения в динамических средах ronments», Proc. IEEE Int. Конф. «Интеллектуальные роботы и системы », 2005 г., стр. 2210–2215. [5] Р. Дальхаус, Дж. Куртс, П. Маасс и Дж. Тиммер, Математические методы Методы анализа временных рядов и цифровой обработки изображений, сер. Понимание сложных систем. Springer, 2008. [6] М. Верлинг, Дж. Циглер, С. Каммель и С. Трун, «Генерация оптимальной траектории для динамических уличных сценариев в рамке Frenet», в Proc. из IEEE Int. Конф. по робототехнике и автоматизации, 2010, с. 987–993. [7] Дж. Циглер и М. Верлинг, «Навигация роботоподобных роботов в неструктурированной среде с использованием функции стоимости, чувствительной к препятствиям», в Proc. из симпозиума IEEE по интеллектуальным транспортным средствам, 2008 г., стр.787–791. [8] Э. Фраццоли, М. А. Далех и Э. Ферон, «Планирование движения в реальном времени для гибких автономных транспортных средств», в Proc. Американской конференции по контролю , 2001 г., стр. 43–49. [9] Т. Фрайхард и Х. Асама, «Неизбежные коллизионные состояния. Шаг к более безопасным роботам? » pp. 388–393, 2004. [10] Л. Мартинес-Гомес и Т. Фрайхард, «Эффективное универсальное средство проверки состояния неизбежного столкновения 2D », в Proc. IEEE Int.Конф. на Интеллектуальные роботы и системы, 2008, стр. 234–241. [11] Д. Альтхофф, М. Басс, А. Лавицки, М. Верлинг и Д. Воллхерр, «Генерация траектории в режиме онлайн для безопасного и оптимального движения транспортного средства. Планирование», Автономные мобильные системы, 2012. С. 99–107. [12] С. Бурайн, Т. Фрайхард и Х. Салхи, «Обеспечиваемая безопасная навигация для мобильных роботов с ограниченным полем обзора в динамических средах», в Proc. IEEE Int.Конф. по робототехнике и автоматизации, 2012, с. 174–179. [13] Ф. Бланкини, «Установочная инвариантность в управлении», Automatica, vol. 35, нет. 11, pp. 1747 — 1767, 1999. [14] T. Schouwenaars, «Безопасное планирование траектории автономных транспортных средств», диссертация , Массачусетский технологический институт, 2006. [15] M. Althoff and Дж. М. Долан, «Онлайн-проверка автоматизированных дорожных транспортных средств с использованием анализа доступности», IEEE Transactions on Robotics, vol.30, нет. 4, pp. 903–918, 2014. [16] ——, «Основанное на наборах вычисление поведения транспортного средства для онлайн-проверки автономных транспортных средств », in Proc. IEEE Int. Конф. по интеллектуальным транспортным системам, 2011, стр. 1162–1167. [17] M. Althoff, D. Althoff, D. Wollherr и M. Buss, «Проверка безопасности автономных транспортных средств для скоординированных маневров уклонения», Proc. симпозиума IEEE по интеллектуальным транспортным средствам, 2010 г., стр.1078–1083. [18] S. S¨ ontges и М. Альтхофф, «Определение отсутствия траекторий уклонения для систем предотвращения столкновений», in Proc. IEEE Int. Конф. по интеллектуальным роботам и системам, 2015, стр. 956–961. [19] М. Хильшер, С. Линкер, Э.-Р. Ольдерог, «Доказательство безопасности движения маневров на проселочных дорогах», Теории программирования и формальных методов. Springer, 2013, стр. 196–212. [20] W.Дамм, Х.-Дж. Питер, Дж. Раков и Б. Вестфаль, «Можем ли мы построить это: формальный синтез стратегий управления для совместной помощи водителю систем», «Математические структуры в компьютерных науках», вып. 23, нет. 04, pp. 676–725, 2013. [21] А. Ризальди и М. Альтхофф, «Формализация правил дорожного движения для учета возможностей автономных транспортных средств», в Proc. IEEE Int. Конф. на Интеллектуальные транспортные системы, 2015, стр. 1658–1665. [22] Х. Бек, Т. Эйтер и Т. Креннваллнер, «Управление несогласованностью для правил дорожного движения: формализация и сложность результатов», в Логика в искусственном интеллекте, 2012, том. 7519. С. 80–93. [23] Европейская экономическая комиссия: Комитет по внутреннему транспорту, «Венская конвенция о дорожном движении», ноябрь 1968 г. [онлайн]. Доступно: http://www.unece.org/f leadmin / DAM / trans / conventn / crt1968e.pdf [24] M. Koschi and M.Альтхофф, «SPOT: инструмент для прогнозирования участников дорожного движения на основе набора», в Proc. симпозиума IEEE Intelligent Vehicles , 2017. [25] А. Ризальди, Ф. Иммлер и М. Альтхофф, «Официально проверенная программа Правил безопасного движения на расстоянии для автономных транспортных средств» в NASA Симпозиум по формальным методам, 2016, стр. 175–190. [26] Т. Нипкоу, Л. К. Полсон и М. Венцель, Изабель / HOL A Proof Помощник по логике высшего порядка, сер.LNCS. Springer, 2002, т. 2283. [27] С. М. Лоос, А. Платцер и Л. Нистор, «Адаптивный круиз-контроль: гибридный, распределенный и теперь официально подтвержденный», in Proc. Междунар. Симпозиум по формальным методам, 2011, стр. 42–56. [28] С. Митч, С. М. Лоос и А. Платцер, «На пути к формальной проверке контроля за движением на автомагистралях», in Proc. IEEE Int. Конф. по Cyber- Физические системы, 2012, стр. 171–180. [29] Р.У. Аллен, Х. Т. Шостак, Д. Х. Клайд, Т. Дж. Розенталь и К. Дж. Оуэнс, «Динамическая устойчивость транспортного средства и переворачивание», Технический отчет NASA STI / Recon N, том. 93, 1992. [30] К. Акерманн, Р. Изерманн, С. Мин и К. Ким, «Дизайн устройства для принятия решений для маневра уклонения или торможения для уклонения от столкновения », в 14. Международный симпозиум в Штутгартере: Automobil- und Motorentechnik. Springer, 2014, стр. 401–415. [31] Федеральное управление автомобильных дорог по исследованиям и технологиям, «US Highway 101 Dataset», январь.2007. [Интернет]. Доступно: https: //www.fhwa.dot.gov/publications/research/operations/07030/ [32] Дж. Йоханссон и К. Румар, «Время реакции водителей на тормоз», Human Factors, т. 13, вып. 1, pp. 23–27, 1971. Примечание редактора: видеоролики в этой истории содержат графические материалы. Незадолго до полуночи 28 марта 2017 года серебристый Dodge Caravan промчался мимо патруля шоссе Дастина А.Моцингер, припаркованный на шоссе в сельской местности Северной Каролины. Моцингер помчался за мчащимся фургоном. Водитель остановился, но когда солдат вылез из крейсера, фургон уехал. Моцингер бросился в погоню. В ту ночь в фургоне за рулем находился 15-летний Осиэль Карбахал. Его пассажиры: его 16-летняя сестра, ее 15-летний парень и 15-летний друг. Подростки забрали фургон без разрешения матери Карбахала в соседнем Морвене. «Возможно, их 55, они повсюду», — сказал Моцингер своему начальнику по радио, используя код для пьяного водителя. «Если вы можете ПИТАТЬ его, продолжайте», — сказал начальник. Когда подростки пересекли границу округа Ансон на скорости 100 миль в час, Моцингер догнал их. Затем он врезался своим Dodge Charger в правую заднюю панель Каравана, сбив его с дороги. Фургон перевернулся и начал вращаться, приземлившись на расстоянии почти 500 футов. Сила срезала колеса с левой стороны автомобиля. Удар отбросил троих подростков из каравана. Двое из них погибли.Один сломал ему спину. Водитель получил легкие травмы. Минивэн разбился после погони на высокой скорости с солдатом дорожного патруля Северной Каролины в 2017 году. Солдат выполнил маневр PIT, в результате чего водитель потерял контроль над автомобилем, который перевернулся и приземлился на расстоянии 500 футов, в результате чего два пассажира погибли. . (Подразделение по реконструкции дорожного патруля штата Северная Каролина) Маневр солдата не был случайным — это был метод точной иммобилизации, тактический маневр, которому он был обучен. В успешной PIT, преследующий офицер использует крейсер, чтобы толкнуть заднюю часть убегающей машины в сторону, заставляя ее вращаться и прекращая преследование. Но такая тактика может иметь смертельные последствия. На данный момент в этом году девять человек по всей стране были убиты в ходе маневров PIT, включая 16-летнего подростка, который ехал на угнанной машине в Лонгмонте, штат Колорадо, а также водителя и пассажира, которых полиция преследовала за превышение скорости. Округ Крик, штат Оклахома. Только в этом месяце 29-летний водитель, подозреваемый в нетрезвом состоянии, сбежал с дорожной остановки в округе Коуэта, штат Джорджия., погиб после маневра PIT. С 2016 года по меньшей мере 30 человек погибли и сотни были ранены, в том числе некоторые офицеры, когда полиция использовала маневр для прекращения преследования, согласно расследованию The Washington Post. Из этих смертей 18 произошли после того, как полицейские попытались остановить автомобили из-за незначительных нарушений правил дорожного движения, таких как превышение скорости. В восьми случаях полиция преследовала угнанный автомобиль, а в двух водители подозревались в совершении тяжких преступлений. Два других водителя были объявлены склонными к самоубийству. Десять из 30 убитых были пассажирами убегающих автомобилей; четверо были случайными прохожими или жертвами преступления. Половина погибших в авиакатастрофах были цветными: девять чернокожих, четыре латиноамериканца и один коренной американец. Четырнадцать из убитых были белыми, раса двоих не могла быть определена. Общее число людей, которые были убиты или ранены в результате маневра, неизвестно, потому что федеральное правительство не требует, чтобы их отслеживали более 18 000 полицейских управлений страны. Смерть 25 мая Джорджа Флойда под коленом офицера полиции Миннеаполиса привела к возобновлению общественного внимания к тактике насилия со стороны полиции, включая стрельбу, электрошокеры и удушающие захваты. Но маневр НДФЛ — также потенциально смертоносное применение силы полицией — не получил такого же внимания, несмотря на его риск и широкое распространение в ведомствах по всей стране. Чтобы изучить эту тактику, The Post собрала статистику о смертельных случаях и травмах, полученных от ПНН с 2016 года, на основе новостных сообщений и отчетов 100 крупнейших городских полицейских управлений и 49 полицейских агентств штата.Ответы поступили от 142 из них. Большинство отделов не выделяют данные о смертях и травмах и могут предоставить только политику в отношении того, использовали ли они этот маневр. Многие не смогли сказать, как часто погони заканчивались ПИТ. Одним из девяти водителей, погибших в этом году, был 34-летний Джастин Баттенфилд, человек, семья которого сказала, что он умственно неполноценен и любил ездить по дорогам вокруг своего дома в Ван-Бурене, штат Арканзас. Вскоре после рассвета апреля 10, Баттенфилд на автомобиле Dodge Ram не смог остановиться на светофоре и затем начал бежать, когда U.Сотрудник лесной службы С. попытался остановить его. Солдат штата Арканзас Майкл Шон Эллис начал погоню. Видео с видеорегистратора из машины солдата запечатлело Баттенфилда, когда он свернул на дорогу встречного транспорта. «Остановите эту машину, как только появится прорыв», — сказал Эллису по радио начальник. Эллис сбил грузовик Баттенфилда со скоростью 109 миль в час, в результате чего оба автомобиля упали. Грузовик Баттенфилда приземлился на ее крышу и стал пандусом для машины солдата, взметнув ее в воздух и прорезав два уличных фонаря. Баттенфилд погиб, а Эллис получил «травмы, не опасные для жизни», согласно полиции штата. «Им следовало отступить, а он вернулся бы домой», — сказала Кэрол Хенсон, мать Баттенфилда. «Тогда они могли бы подойти и схватить его. Представитель государственного патруля Арканзаса сказал, что департамент сожалеет о гибели людей, но подчеркнул, что НДФЛ часто зависит от непредсказуемого поведения убегающего водителя. «ПИТ. . . Предполагается, что это управляемый маневр, основанный на всех факторах, в ту секунду, когда бампер сотрудника правоохранительных органов соприкасается с автомобилем. Вот на чем все основано. Если подозреваемый каким-либо образом изменит динамику, все может очень легко испортиться, и в этом нет никаких сомнений », — сказал официальный представитель Билл Сэдлер.Он отказался предоставить Эллису комментарии. При выполнении на более медленных скоростях — обычно от 35 до 45 миль в час — маневр может быть безопасным и эффективным для прекращения преследования, считают эксперты. Полицейское управление Лос-Анджелеса сообщает, что оно использовало маневры PIT с 2005 года без смертельных исходов или серьезных травм. Департамент не разрешает маневры на скорости более 35 миль в час. Офицерам не разрешается преследовать или убегать от транспортных средств, убегающих от мелких нарушений ПДД. И его использование ограничено занятиями с участием опасных преступников или пьяных водителей. «Это позволяет нам обезопасить окружающее сообщество при задержании преступника, совершившего серьезное преступление», — сказал начальник полиции Лос-Анджелеса Мишель Р. Мур. Он назвал это важным инструментом в определенных обстоятельствах. «Мы осознаем, что сверх этой скорости динамический характер и физика столкновения могут привести к тому, что транспортное средство станет опасным для населения, пассажиров и офицеров», — сказал Мур. Как полиция использует маневр PIT для прекращения преследования Сначала полицейский тянет за убегающим автомобилем и соответствует его скорости. Используя переднюю боковую панель, офицер соприкасается с задней панелью убегающего автомобиля и осторожно въезжает в нее. Целевая машина вращается в направлении, противоположном повороту офицера. Полицейская машина продолжает движение вперед. Целевой автомобиль разворачивается и останавливается. Полицейская машина продолжает движение, пока не удаляется от цели. На большей скорости в результате маневра автомобили попали в поток машин и деревья, а в одном случае в округе Тифт, штат Джорджия, погибла женщина., когда она стояла во дворе своего дома. «Когда вы начинаете набирать скорость, это становится очень опасным», — сказал Рик Джовенго, изучавший использование PIT в качестве старшего аналитика в Федеральных центрах подготовки сотрудников правоохранительных органов в Глинко, штат Джорджия, где действует федеральное правительство. государственные, местные и племенные чиновники со всей страны обучаются использованию PIT. Несмотря на риск, на национальном уровне было мало исследований, посвященных его безопасности или преимуществам. В 2006 году Ассоциация начальников полиции Джорджии провела одно из немногих исследований маневра в рамках более широкого взгляда на действия полиции в штате.В отчете сделан вывод, что «маневр PIT является контролируемым и предсказуемым», но «при определенных обстоятельствах может привести к серьезным травмам или смерти». Эти обстоятельства, как сообщается в отчете, включают НДМТ на водителя, который не пристегнут ремнем безопасности, НДМТ, который выбрасывает людей из убегающего автомобиля, или ПИТ, который сбивает убегающую машину с катушек. The Police Executive Research Forum, вашингтонский аналитический центр, который консультирует начальников полиции по вопросам политики, изучил смертоносное применение огнестрельного оружия и полицейские преследования, но не использование НДФЛ. «Обычно мы не рекомендуем это делать», — сказал Чак Векслер, исполнительный директор группы. «Вы не хотели бы подвергать опасности офицера или человека, которого преследуете, если только у вас не было никаких оснований полагать, что они собирались совершить насильственное преступление». Карен М. Блюм, профессор права на юридическом факультете Саффолкского университета, изучала тактику в рамках Проекта по обеспечению подотчетности национальной полиции, который представил краткую информацию по делу Верховного суда, возбужденному человеком, который был парализован в 2001 году во время попытки ПИТ со стороны Офицер полиции Грузии. «При превышении определенной скорости нет ничего точного в маневре PIT», — сказал Блюм. «Это похоже на таран, превращающий две тяжелые машины в смертельные снаряды». (Офис шерифа округа Пикенс) В прошлом году офис шерифа Джексонвилля во Флориде провел более 200 полицейских преследований, в результате чего 61 из них были привлечены к подоходному налогу, согласно ежегодному отчету офиса. Только один из них закончился смертью: Луи Уоррен Риз, 84-летний ветеран ВМФ в отставке, которого похитили. Вскоре после 14:00 2 января 2019 г. боевик ограбил аркаду Lucky Charms в Джексонвилле и пешком убежал на задний двор Риза. Полиция окружила собственность Риза. Подозреваемый в убийстве, Лоуренс Холл III, ворвался в дом Риза, затолкал его в заднюю часть его внедорожника «Додж», припаркованного в гараже, открыл дверь и умчался прочь. Когда полицейский вертолет и патрульные машины следовали за убегающим внедорожником, полиция искала Риза, не подозревая, что он находился в задней части внедорожника, согласно отчетам полиции. Во время погони, которая достигла скорости более 100 миль в час, Холл врезался в офицера, пытавшегося поставить палки для снятия давления в шинах на дороге. Другой офицер попытался поднять внедорожник, но потерпел неудачу и разбился. Наконец, согласно отчетам полиции, в восьми милях от того места, где это началось, офицер К-9 произвел PIT на убегающем автомобиле. ПИТ отправил внедорожник в бетонный телефонный столб, и автомобиль раскололся надвое. На его крышу упали линии электропередач, и машина начала гореть.Полиция спасла Холла, но потом поняла, что Риз тоже была в машине. «Ответившие сотрудники потушили пожар, и именно в это время они обнаружили пожилого мужчину. . . на заднем сиденье машины », — написали офицеры в рапорте. Риз, дьякон в своей церкви, получил коллапс легкого и переломы, в том числе сломал ногу, руку и позвоночник, как рассказали его родственники местному телевидению. Через неделю он скончался в больнице. Его семья не ответила на запросы о комментариях. Холл и два заместителя получили серьезные травмы.Депутаты были награждены медалями «Пурпурное сердце», а Холлу было предъявлено обвинение в покушении на убийство и похищение людей. Дело находится на рассмотрении. Офис шерифа Джексонвилля отказался комментировать аварию или использование маневра, сославшись на продолжающееся расследование преступлений. На протяжении 1990-х годов только несколько департаментов по всей стране использовали эту тактику, известную под разными названиями, включая тактическое вмешательство транспортных средств или TVI. В 1996 году сержант полиции Тампы в поисках новой тактики безопасного прекращения преследований узнал о ее применении полицией округа Фэрфакс, штат Вирджиния. «Я могу научить шимпанзе, как это сделать», — позже сказал он Tampa Bay Times. Другие ведомства начали использовать PIT, в том числе Государственный патруль Джорджии. С 1997 года патруль провел более 1500 маневров PIT, согласно отчетам судов и агентств, зафиксировав первый смертельный исход в 1998 году. С тех пор было убито по меньшей мере 34 человека, в том числе семь с 2016 года. «Когда наступит время». используются в рамках политики и в рамках законодательства штата, мы чувствуем, что делаем хорошую работу и что нет никаких оговорок », — сказал лейтенант.Стефани Столлингс, пресс-секретарь государственного патруля Джорджии. «Конечно, мы никогда не хотели бы, чтобы смерть наступила в результате любого маневра, который мы используем, но, к сожалению, бывают случаи, когда смерть наступает в результате». (Департамент шерифа округа Гвиннет) Другие департаменты штата приняли маневр НДФЛ, в некоторых случаях приводящий к плачевным результатам. В сентябре депутат округа Уитфилд, штат Джорджия, использовал НДФЛ, чтобы прекратить преследование угнанной машины. По сообщениям полиции, 21-летнюю водительницу Макайлу Уитт выбросило на 50 футов, а ее левая рука была отрезана ниже локтя. Связаться с Уиттом для комментариев не удалось. В июне 2018 года в округе Монро, штат Джорджия.По сообщениям местных новостей, заместитель шерифа задержал 28-летнюю Гваделупе Гарсиа из-за подозрения в нарушении тонировки окон. Гарсия сбежал, а помощник шерифа проехался на скорости почти 76 миль в час, врезавшись своей Toyota Camry в деревья и выбросив Гарсиа и его 19-летнего племянника из машины. Гарсия умер, а его племянник сказал The Post, что он был госпитализирован как минимум на две недели. Департамент шерифа округа Монро не ответил на запросы о комментариях. Присцилла Вильянеуэва, подруга Гарсии и мать их троих детей, рассказала The Post, что у него были проблемы с полицией, и он боялся быть депортированным.Раньше его арестовывали по обвинению в наркотиках. «Я думаю, им следовало попробовать другой метод замедления автомобиля», — сказала Виллануэва. «PIT был проведен на такой высокой скорости». За пределами Атланты 4 декабря 2018 года полиция Южного Фултона попыталась остановить автомобиль Hyundai Sonata, который, как сообщалось, был украден. Водитель, 19-летний Эммит Дэниелс, умчался, едва не ударив офицера, который только что вышел из его полицейской машины. Офицеры погнались, преследуя Дэниэлса около трех миль и достигнув скорости не менее 65 миль в час, согласно отчетам полиции. Разбитый Hyundai Sonata стоит на обочине дороги в Южном Фултоне, штат Джорджия, после аварии 4 декабря 2018 года. Согласно отчетам полиции, авария произошла после полицейской погони, которая достигла скорости не менее 65 миль в час. закончился, когда офицер выполнил PIT, отправив Hyundai вращаться по тротуару, убив пешехода. (Департамент общественной безопасности Джорджии) Когда Дэниэлс проезжал мимо группы таунхаусов, один из офицеров выполнил маневр PIT, используя свой Dodge Charger, чтобы ударить по правому заднему углу Hyundai, заставив его развернуться на тротуаре.Автомобиль раскололся на опоре электросети, скатился по крутой насыпи и остановился. Дэниелс вбежал в таунхаусы, спасаясь от полиции. В ходе расследования полиция обнаружила обувь недалеко от места крушения, которую, как они подозревали, Дэниелс потерял во время бегства, согласно местным новостям. Пять недель спустя ландшафтный дизайнер, работавший в этом районе, обнаружил тело 41-летнего Маркуса МакКрари, который был сбит и убит неконтролируемым автомобилем Hyundai. Как сообщил The Post ландшафтный дизайнер, у тела МакКрари, которое было обнаружено за кустами, отсутствовала нижняя левая лапа. Позже полиция обнаружила нижнюю часть ноги МакКрари в колесной арке автомобиля Hyundai на штрафстоянке. Сестра-близнец МакКрари, Миракл Уокер, сказала, что в день крушения МакКрари направлялась к ее дому, находившемуся всего в нескольких кварталах от нее. Когда он не появился, она попыталась его найти, но безуспешно. Она сказала, что теперь знает точный момент смерти ее брата: свет в ее доме погас, когда автомобиль Дэниэлса переехал линии электропередач. «Офицеры сказали, что скорость была до 90 миль в час», — сказал Уокер The Post, сказав, что виноваты и полиция, и Дэниелс.«Нет времени, когда можно идти по этой улице, и там нет пешеходов». Дэниелс был арестован несколькими неделями позже по обвинению в тяжком убийстве и убийстве с использованием автомобиля в результате смерти Маккрэри, согласно судебным документам. Дело продолжается. Адвокат Дэниэлса не ответил на запрос о комментарии. Начальник полиции Южного Фултона Кейт Медоуз также не ответил на запросы о комментариях. (Офис шерифа округа Флоренс) Риски, связанные с использованием PIT, разделили отделы. Из 142 правоохранительных органов, ответивших The Post, 74 заявили, что не используют этот маневр. Нельзя сказать. «Мы не используем маневр PIT, и причина этого — безопасность», — сказал Пол Линдерс, представитель St.Пол Полицейское управление в Миннесоте. «Если бы наши офицеры НОЧИЛИ машину в жилом районе, она могла бы оказаться во дворе, на детской площадке или в магазине. Мы не хотим рисковать и ранить ни в чем не повинного прохожего, чтобы таким образом положить конец преследованию ». Полиция штата Нью-Йорк не использует эту тактику «из-за потенциальной опасности, которую она представляет для намеченных пассажиров автомобиля, преследующих солдат и автомобилистов», — заявил Бо Даффи, пресс-секретарь департамента. Полицейское управление округа Фэйрфакс, одним из первых принявшее участие в этом маневре, заявило, что обучило его использованию многие агентства по всей стране. «Мы можем провести яму с минимальным повреждением или без повреждений, кроме переноса краски между двумя автомобилями и заставить машину остановиться там, где мы хотим, чтобы она остановилась», — сказал второй лейтенант Джей Джексон, отвечающий за центр и трек. в Шантильи, штат Вирджиния, где полиция Фэрфакса проводит тренировку преследования. Офицеры постепенно учатся соответствовать скорости убегающего транспортного средства и контактировать с движущимся транспортным средством, сказал Джексон.Офицеры не могут использовать эту тактику на улицах, пока они не завершат восемь успешных PIT на трассе. Они должны проходить повторную аттестацию каждые три года. Джексон сказал, что на скорости 45 миль в час и ниже убегающие машины повернутся на 180 градусов в следующую полосу движения. По его словам, выше этой скорости события менее предсказуемы. (Офис шерифа округа Форсайт) Тридцать из 67 агентств, которые используют маневр PIT, позволяют своим офицерам делать это на любой скорости; Согласно опросам The Post, 26 агентств имеют ограничение скорости движения. Одиннадцать агентств не предоставили информации о том, есть ли у них ограничения скорости. Полиция штата Индиана, например, запрещает его использование на скорости более 50 миль в час. Полиция штата в Айове и Калифорнии ограничивает PIT скоростью до 35 миль в час и ниже. Многие агентства предлагают, чтобы должностные лица получали одобрение руководителя перед выполнением ИПН. У дорожного патруля штата Юта есть политика, состоящая из одного абзаца, которая требует от сотрудников, использующих НДФЛ, «действовать в рамках законности, здравого смысла и общепринятой практики». Политика преследования Государственного патруля Джорджии гласит, что полицейский должен учитывать состояние дороги, видимость, пешеходное и автомобильное движение, тип транспортного средства и наличие пассажиров в убегающем транспортном средстве.Патруль запрещает проезд на мотоциклах и квадроциклах. Но ограничений по скорости нет, и офицеры сами решают, что является «разумным». Патруль штата Небраска предостерегает от использования PIT на пикапах с пассажирами в грузовом отсеке или более крупных транспортных средствах, но не имеет ограничений по скорости. Некоторые агентства разрешают офицерам выполнять PIT на определенных скоростях только в том случае, если они считают, что применение смертоносной силы оправдано. «В некоторых местах и эксперты по правовым вопросам скажут, что PIT свыше 55 миль в час представляет собой использование смертельной силы, а некоторые скажут, что 45.Это несколько произвольно », — сказал Джеффри Альперт, профессор криминологии и уголовного правосудия Университета Южной Каролины и соавтор книги« Оценка применения силы полицией ». В Альбукерке полиция разрешает полицейским подъезжать к транспортным средствам со скоростью более 35 миль в час, если они считают, что применение смертоносной силы оправдано. Так было, когда полиция использовала маневр на внедорожнике Gulf Stream Touring. Вскоре после 19:00 20 июня 2017 г. полиция попыталась арестовать Дэвида Барбера в парке для домов на колесах по обвинению в незаконном хранении оружия и зарядке батареи.Барбер сбежал на украденном 26-футовом фургоне, вырвав канализационный шланг и электрические шнуры из их соединений и проехав через металлические ворота. Сначала полиция решила не преследовать Барбера, потому что полицейский самолет наблюдал за фургоном сверху, сержант. Альберт Сандовал сказал позже в своих показаниях. Но когда Барбер чуть не ударил офицера, Сандовал приказал полиции броситься в погоню. Около 45 минут на скорости до 70 миль в час полиция преследовала фургон, в результате чего были сбиты как минимум пять автомобилей. После того, как фургон проехал по оживленному перекрестку, офицер подъехал к нему и задел передний правый бок своего Ford Expedition с задней стороны фургона с водителем.Он повернул руль вправо. «Фургон не« раскрутился », как он ожидал», — согласно более позднему расследованию полиции. Вместо этого «размер и вес фургона вынудили его и фургон пересечь среднюю полосу и выйти на южные полосы движения». Экспедиция офицера столкнулась с тремя другими автомобилями, но Барбер продолжил движение, проехав на фургоне через срединную полосу и снова выйдя на полосы движения, идущие на север. Другой офицер провел вторую PIT на фургоне на скорости около 62 миль в час, как показывают записи. На этот раз PIT вынудил RV прыгнуть через середину центра и ударить встречный Chevy Malibu. За рулем Малибу был Тито Пачеко, отец-одиночка троих подростков. Пачеко скончался через три недели от полученных травм. Его дети и брат подали в суд на полицию Альбукерке, согласившись на 500 000 долларов, сообщил представитель города. Семья Пачеко не ответила на запрос о комментарии. Барбер был арестован и обвинен в нескольких преступлениях, включая убийство первой степени в связи со смертью Пачеко.Дело продолжается. «Если мы не сделаем ничего, чтобы остановить его в то время, в этом фургоне, шансы, что он кого-нибудь убьет, были бы очень высоки», — сказал Сандовал в показаниях по иску, описывая свой приказ остановить фургон. «Однажды я дал эту директиву. . . Я знал, что эти офицеры собирались использовать свои машины, чтобы нанести удар по этой машине, что могло привести к смерти или серьезным телесным повреждениям водителя », — сказал он. Гилберт Гальегос, представитель полиции Альбукерке, сказал, что с момента крушения в департаменте произошло много изменений в политике. «Мне не известно о каких-либо других серьезных инцидентах, связанных с маневрами НДФЛ», — сказал Гальегос. «У нас также есть дополнительное обучение водителей для офицеров, попавших в аварии, и недавно мы получили новый симулятор вождения, чтобы помочь с обучением». Вид с воздуха на минивэн, который разбился после погони на высокой скорости с солдатом дорожного патруля Северной Каролины в 2017 году. Солдат выполнил маневр PIT, в результате которого водитель потерял контроль над транспортным средством, в результате чего погибли два пассажира.(Группа реконструкции дорожного патруля штата Северная Каролина) За несколько недель до того, как Мотсингер, солдат дорожного патруля Северной Каролины, использовал PIT, чтобы остановить минивэн, полный подростков, он закончил два других занятия с тактикой. В одном он отправил водителя в канаву на скорости 65 миль в час и причинил ущерб своей патрульной машине на сумму 3300 долларов. Записи показывают, что в ту ночь, когда он протаранил фургон, он ехал на арендованном автомобиле. Подростки были в дороге в ту ночь, потому что Мария Карбахал и ее мать поссорились из-за парня Марии, который жил с ее семьей.В гневе Мария собрала одежду, забрала фургон матери и ушла из дома с братом Осиэлем, своим парнем и еще одним другом. Тереза Чапарро, мать Марии и Осиэля, ждала звонка в полицию. Она боялась, что они арестуют детей. Но через два дня Чапарро пошел в полицейский участок Уэйдсборо и поговорил с офицером, который разослал предупреждение о том, что подростки пропали. Следующей ночью Осиэль, у которого не было прав, ехал со скоростью 70 миль в час в зоне 45 миль в час на шоссе 74, когда Моцингер заметил, что фургон пролетает мимо, и бросился в погоню. Осиэль сначала остановился, но сказал The Post, что один из подростков в машине предупредил: если они попадут в беду, их арестуют. Все сказали ему идти, сказал он. Осиэль умчался. Они были всего в нескольких милях от его дома. «Я чувствовал, что если я смогу добраться туда, где была моя мама, она могла бы мне помочь», — сказал Осиэль. Моцингер попросил диспетчера связаться с полицией впереди и спросить, есть ли у них «стопорные палки», полосы с шипами, которые можно бросить на проезжую часть, чтобы вывести из строя шины фургона.Нет, — ответила она, судя по аудиозаписи радиопереговора. Он спросил, следует ли ему СЛИТЬ фургон. Наблюдатель спросил, есть ли в машине другие люди. В то время в Северной Каролине не было ограничений скорости для маневров PIT, используемых такими офицерами, как Мотсингер, которые прошли более обширную подготовку. Но политика запрещала военнослужащим использовать маневр, если в убегающем автомобиле находились «дети или другие невинные пассажиры». «Я видел по крайней мере еще одного пассажира», — сказал Моцингер по радио. «Не знаю, сколько». Моцингер добавил, что движение на дорогах мало, а местность чистая. «Думаешь, ему 55?» — спросил надзиратель, используя полицейский радиокод для пьяного водителя. Моцингер сказал, что да. Начальник дал ему добро на НДФЛ. За семнадцать миль погони Мотсингер приблизился, и его передняя левая боковая панель зацепила заднюю правую сторону фургона.Осиэль не справился с управлением, и минивэн перевернулся, пока не остановился в лесу. Мария Карбахал умерла после того, как военнослужащий из Северной Каролины устроил PIT на фургоне, в котором она ехала. (Семейное фото) Заднее сиденье фургона, где сидели Мария Карбахал и ее парень Джонатан Томас, вырвались на свободу. выбросить их из машины. Полиция сообщила Чапарро, что Мария умерла, сжимая Томаса, у которого был сломан позвонок. Друг, Канди Кастрехон, который сидел на переднем пассажирском сиденье, также был катапультирован.Кастрехон, которая любила снимать видео о том, как она синхронизирует губы, умерла через несколько дней. В отчете отдела реконструкции столкновений дорожного патруля Северной Каролины говорится, что «маневр в этой аварии был выполнен правильно». Представитель дорожного патруля Северной Каролины назвал эти смерти «трагическими», но отказался от дальнейших комментариев по этому делу. Связаться с Моцингером для получения комментариев не удалось, и департамент отказался предоставить его. Чапарро рассказала The Post, что в ночь крушения она молилась в церкви, простудилась и знала, что Мария в беде.Когда она вернулась домой, ее младшая дочь сказала, что подростки остановились у дома, но испугались, что у них проблемы, и снова ушли. Она собиралась ложиться спать после полуночи, когда позвонили о катастрофе. Когда она прибыла в больницу, она увидела группы врачей, сгрудившихся вокруг худой девочки, и узнала мать Канди Кастрехон поблизости. В соседней комнате она увидела Томаса, парня Марии. Она пошла в последнюю комнату и увидела своего сына Осиэля, сидящего на столе. Осиэль спросил о своей сестре.Но она уже была мертва. Повреждение минивэна с подростками после того, как солдат из Северной Каролины выполнил маневр PIT. (Подразделение по реконструкции дорожного патруля штата Северная Каролина) После аварии Бюро расследований штата Северная Каролина проверило использование Мотсингером НДФЛ и передало полученные результаты в Генеральную прокуратуру штата, которая очистила Моцингера от любых нарушений. «Похоже, что все жизнеспособные средства остановки транспортного средства были исчерпаны, и вероятность серьезных травм или смертельного исхода для населения оставалась серьезной проблемой до решения солдата Мотсингера использовать PIT в качестве средства для вывода из строя транспортного средства», Генеральная прокуратура написала в феврале 2018 года письмо о своем решении. «Солдат Моцингер был вынужден в доли секунды оценить количество сил, необходимых в ситуации, которая была очень напряженной, неопределенной и быстро развивающейся». Семьи Марии и Канди подали в суд на государство, утверждая, что Моцингер применил чрезмерную силу, был безрассудным и нарушил политику ведомства. Они утверждали, что Моцингер должен был знать, что в фургоне находились четыре подростка. Дело было урегулировано в мае по нераскрытой сумме, как показывают записи. Томас сказал, что после крушения у него начали появляться навязчивые вспышки его друзей, летающих внутри фургона. Он сказал, что был переполнен сожалением о том, что не сделал больше, чтобы остановить Осиэля от ускорения, когда их остановили. По словам адвокатов, представляющих семью, Осиэлю было предъявлено обвинение в совершении уголовного преступления за уклонение от полиции, а затем он был признан виновным в совершении преступления несовершеннолетнего. По словам адвокатов, Осиэль не был в состоянии алкогольного опьянения. «Для меня не имеет смысла, что это сделала полиция, — сказал Томас. «Зачем вам PIT маневрировать на скорости более 100 миль в час? Чего вы в этом добились? Вы убили двух невинных людей, у которых была впереди вся их жизнь, потому что кто-то другой решил ускориться. В результате аварии дорожный патруль Северной Каролины в июле 2017 года пересмотрел свою политику в отношении использования PIT: солдатам не разрешается проехать на автомобилях PIT со скоростью более 55 миль в час, если убегающий водитель не совершил уголовное преступление или применение смертоносной силы оправдано. Чапарро сказала, что сожалеет о звонке в полицию. «Им не нужно было убивать моего ребенка», — сказала она. «Для чего?» — спросила она через переводчика. «В ту субботу, когда мы пошли на работу, я не понимал, что это будет последний раз, когда я поговорю с дочерью. Джули Тейт, Стивен Рич, Ана Часин и Жюстин Коулман внесли свой вклад в этот отчет, который был опубликован в сотрудничестве с семинаром по журналистским расследованиям, в котором участвовали Чейцин и Коулман. Шон Равив — независимый журналист из Атланты. Он написал статьи для Wired, Smithsonian, BuzzFeed, The Ringer, Deadspin, Columbia Journalism Review и The Washington Post. Джон Салливан — репортер группы расследований The Washington Post, репортер-расследователь в Американском университете и старший редактор Workshop по журналистским расследованиям.Его работа была отмечена множеством наград, в том числе Пулитцеровской премией 2012 года за государственную службу, которой он поделился с коллегами из Philadelphia Inquirer. Вместе с картой, запланированным маршрутом к пункту назначения и прогнозами, планировщик поведения дает советы о том, как маневрировать автомобилем. Нам предоставляется множество вариантов: Начните с различных высокоуровневых целей, например, следуя за движением транспорта, обгоняя медленно движущиеся машины или ускоряясь до предельной скорости. Мы рассматриваем разные варианты того, как это сделать. Например, переключитесь на левую полосу движения и разгонитесь до 55 миль в час или снизьте скорость, чтобы сохранять безопасное расстояние от впереди идущей машины. Для каждого плана мы определяем полосу движения и нашу целевую скорость в конце нашей оценки.Затем мы рассчитываем местоположение соответственно. Ниже мы приводим список мест (желтые точки), в которых наша машина может оказаться, скажем, за 2 секунды. Когда у нас есть список возможных местоположений, мы вычисляем траекторию для каждого предложения. Но перед этим сначала посмотрим на систему координат. Система координат Локализация и планирование маршрута используют глобальную декартову систему для определения местоположения (x, y). Однако для планирования траектории будет проще работать с системой координат, которая соответствует изгибу проезжей части (, рамка Frenet ).В нашем примере ниже у нас 3 полосы движения. d = 0 — середина проезжей части. d = -1 означает правую полосу. s измеряет расстояние от определенной точки на проезжей части. Таким образом, вместо ( x , y ) наше местоположение по траектории измеряется как ( s , d ) в кадре Френета. Для отображения мы деформируем систему координат Френе следующим образом: Преобразование между декартовой системой координат и системой координат Френе Мы будем использовать карту для преобразования координат между глобальной декартовой координатой и координатой Френе.Однако путевые точки на карте могут быть дальше друг от друга, чем мы хотим. Например, на карте ниже всего 3 путевых точки (розовые). Чтобы интерполировать промежуточные точки, мы используем эти 3 точки для соответствия модели сплайна и используем ее для выполнения преобразования. Теперь давайте посмотрим, как рассчитываются траектории. Модель кубического сплайна При планировании поведения мы предлагаем различные планы. Мы переводим это в целевые местоположения, в которых мы хотим, чтобы наша машина находилась в определенное время.Мы используем это целевое местоположение и несколько предыдущих местоположений для построения кубической сплайновой кривой для моделирования нашей траектории. Эта сплайновая модель сохраняет первую и вторую производные от наших предыдущих траекторий, поэтому у нас будет более плавная поездка (без резких скачков скорости и ускорения). Позже мы используем сплайновую модель, чтобы вычислить, где должна находиться машина на каждые 0,02 секунды в следующую секунду. Затем эта информация передается контроллеру для управления исполнительными механизмами транспортного средства. JMT (Траектория минимизированного рывка) В качестве альтернативы мы можем создать траекторию, чтобы минимизировать рывки, которые мы хотим минимизировать внезапные ускорения.Математически мы определяем s как полиномиальную функцию времени t. Чтобы минимизировать рывки, мы хотим найти оптимальную траекторию, которая минимизирует накопленную величину изменения ускорения, то есть не слишком много резких изменений ускорения | a ’(t) |: Для этого мы ограничиваем наш полином s (t) рангом 5. Интуитивно понятно, что высокий ранг полинома допускает внезапное движение. Например, полиномиальная функция ранга 9 ниже допускает резкие повороты. Для упрощения вычислений мы сбрасываем время на 0, когда вычисляем новую траекторию. Мы знаем свое начальное состояние (местоположение, скорость, ускорение) из нашей автомобильной системы. , и планирование поведения предоставляет нам целевое состояние: Теперь мы хотим найти 6 коэффициентов в нашей модели траектории: При времени = 0, Итак, первые 3 коэффициента могут быть найдены из нашего начального состояния. Мы повторяем if для нашего целевого состояния: Теперь у нас есть еще 3 уравнения, поэтому мы можем решить оставшиеся 3 коэффициента.Мы повторим тот же процесс, чтобы найти многочлен в направлении d . Пример В идеале во время планирования поведения мы не хотим больше ускорения или смены полосы движения к концу нашей запланированной траектории. Таким образом, как для начального, так и для целевого состояния они должны быть: Кроме того, согласно нашему плану, машина иногда должна достигать определенной скорости. (достижение предельной скорости или соответствие скорости идущего впереди автомобиля) Вот наша сводка: Однако на низкой скорости мы не можем вычислить s и d независимо (бумага).В нашем примере мы просто делаем d = постоянным , чтобы обойти проблему на низкой скорости. (т.е. мы не меняем полосу движения на низкой скорости) Траектории оцениваются с помощью функции стоимости. В зависимости от нашей определенной политики он включает такие факторы, как Например, максимальное ускорение ограничено максимальным крутящим моментом автомобиля.Таким образом, это невозможно для траектории, требующей ускорения, превышающего допустимое. Чтобы избежать столкновения, мы сравниваем все прогнозируемые траектории. Мы резко увеличиваем стоимость, когда расстояние между автомобилем становится меньше зоны безопасности. В целях повышения эффективности мы хотим максимально приблизиться к разрешенной скорости. Мы также включим дополнительные параметры состояния в расчет стоимости. Например, мы добавим угол поворота и скорость поворота, чтобы избежать опрокидывания. Однако мы не учитываем эти факторы одинаково.Для удобства и безопасности их вес чрезвычайно высок. Это гарантирует, что мы не сделаем невозможный или рискованный шаг. Некоторые другие веса настраиваются. Поэтому для менее важных факторов, включая комфорт и эффективность, мы проводим эксперименты, чтобы найти хороший баланс между более плавной ездой и более агрессивным вождением для оптимальной скорости. После расчета стоимости всех траекторий мы выбираем одну с наименьшей стоимостью в качестве нашего окончательного решения. Теперь оптимальная траектория выбрана.В нашем примере мы вычисляем следующие 50 местоположений (с интервалом 0,02 секунды), используя созданную нами математическую модель. то есть 1 секунда точек траектории. Преобразуем обратно в глобальную координату. Эта координата x , y будет использоваться контроллером автомобиля для маневрирования автомобиля и для целей определения местоположения. Однако обычно мы не ждем завершения всей траектории для следующей траектории. Часто, когда у нас есть новый набор измерений, мы можем пересчитать новую траекторию. Для удовольствия, это еще один способ отправить свой Tesla на Марс, если планирование пути отсутствует. В этой статье описывается каркас медвежьей кости для планирования пути. Эта структура будет расширена и изменена для решения реальных задач, в частности, для городского вождения. На протяжении всей статьи мы часто упоминаем слияние датчиков и управление ими. Для тех, кто интересуется техническим аспектом, вот еще несколько статей, которые вы можете прочитать. Для читателей, которые хотят получить более подробную информацию об оптимизации траектории, этот документ может стать хорошим началом. хижина испытательного полигона The Proving Grounds стремится имитировать рейдовую ситуацию с баффами / дебаффами, камнями здоровья, ремонтом и едой поблизости, и я считаю, что снижение характеристик, чтобы уравнять количество урона / исцеления каждого игрока на равном игровом поле, является правильным. сделать. 1955–2010 гг. io, чтобы оставить комментарий. America’s Army: Proving Grounds — официальная игра U. Proving Grounds Fight League. АРМИЯ АБЕРДИН НА ПЛОЩАДКЕ ОЧИСТКА РАБОЧЕГО МЕСТА Защитите себя и других от COVID-19 и других инфекций. Испытательный полигон — это объект в XCOM 2.Подготовьте свое тело, душу и дух к росту. Глубоко в пещерах посажено Знамя Грозовой Вершины. Комментарии. • НТС. Испытательный полигон General Motors в Милфорде был первым специализированным испытательным полигоном для автомобилей, когда он открылся в 1924 году. X. Прошло много времени с тех пор, как у нас была возможность ответить на зов битвы. Запись на PG Practice Hutch. Desktoy Добро пожаловать на Абердинский полигон. ком 610 828-9423. Несколько Также частью этой реорганизации испытательного полигона середины 1980-х было учреждение Службы поддержки Абердинского испытательного полигона (ныне U.Бранч восстановления. За это время они переехали в такие места, как Токио, Япония; Венеция, Италия; Полигон Дагвей, штат Юта; Колорадо-Спрингс, Колорадо. Описание. 1-е место, 2006 Torino Awards, Prequel Proving Grounds ориентирован на продвинутых игроков, но имеет значительные награды, которые могут получить даже относительно новые игроки. Приглашение на испытательный полигон 6. Описание обновления Destiny 2: «Испытательный полигон» и квест «Ксенофаг» будут изменены. Мы представляем церковь «Испытательный полигон» как место, где можно проверить истину в Слове Божьем.Фестиваль будет включать как мужские, так и женские открытые категории с двухдневным графиком работы с понедельника по пятницу: с 12 до 22, суббота: с 10 до 20 часов, воскресенье: с 10 до 18 часов. Испытательный полигон Bosch Flat Rock площадью 325 акров предлагает различные Поверхности, такие как зона движения транспортных средств площадью 22 акра, которая включает в себя 30-градусный изгиб высокого берега, поверхности с высоким и низким µ, специальные поверхности и холмы для сцепления с дорогой. Программа испытаний и снижения рисков (PGRR) JPSS была учреждена в 2012 году, и ее основная цель заключается в разработке и улучшении пользовательских приложений данных, алгоритмов и продуктов Suomi NPP / JPSS.com / shop / flashlights Зимний испытательный полигон NATC — это главный зимний полигон, расположенный в Западном Йеллоустоне, штат Монтана. 8 Agu 2019 Ларри начал работать на испытательном полигоне AC во время эволюции трактора 220 и в конечном итоге был ответственным, пока немцы не просматривали и не делились лучшими GIF-изображениями испытательного полигона с 2021 года на Gfycat. Вот как начать и завершить упражнение на полигоне. Напомним Роя Оезера, занявшего третье место на Гранд Стэйт 16 сентября 2015 г., Испытательный полигон в Неваде. 3. Это может быть проверка того, как долго танк может защищать NPC-целителя от потока приближающихся врагов или сколько урона мошенник может нанести целям, избегая при этом повышения осведомленности и проверок движения. Некоторые люди говорят, что Хатч — святой. .Proving Grounds — это новый игровой режим в Borderlands 3. Текст / код доступен по лицензии CC-BY-SA. OSBORNE WOOD PRODUCTS INC 1563M 40 12 x 3 12 Высокий остров Hutch Island Leg Vintage Apple II plus Программное обеспечение Игра WIZARDRY 1 Испытательный полигон Запечатанный NIP. 04, тихоокеанское стандартное время (-8 часов) Amazon. Ноя 2015 — Настоящее время6 лет. Также есть пара высококачественных задач V0-1 и несколько Proving Grounds VI: 21 апреля 2018 г. ». «Полигон испытаний» — это мероприятие с большим опытом, призванное поднять ваш образ мышления, лидерские качества и навыки работы в команде на новый уровень.Армейский испытательный полигон Дагвей Дагвей, Юта 84022 Оператор объекта U. Мы сертифицированный и застрахованный подрядчик класса А в Вирджинии. Proving Grounds был переиздан как однополосная карта 5v5, доступная в пользовательских матчах для игр All-Random All-Middle (ARAM) в патче V1. Здесь находятся известные боулдеринговые проблемы Finders Keepers и Wide Awake Nightmare, а также ряд проектов с двузначными числами. Состоит из более чем 1300 квадратных миль высокогорной пустыни, площади суши больше, чем штат Род-Айленд.Offensive Security Proving Grounds (PG) — это современная сеть для отработки навыков тестирования на проникновение на доступных для использования векторах реального мира. Новый Удар по испытательному полигону Destiny на уровне сложности Грандмастер — трудная задача для любой боевой группы, если они попытаются это сделать на неподготовленном полигоне. Армейский полигон Абердина: приветствуем вас снова 11 Продукция (продолжение) СВЯЗЬ И ИНФОРМАЦИЯ 2 Указатели, касающиеся входа на объект, осведомленности и предотвращения. Щелкните здесь, чтобы загрузить и распечатать указатели для размещения на вашем предприятии.Кандидаты в президенты уделяют Айове больше времени и денег, чем любой другой штат. 25 марта 2021 г. К счастью, писатель Дерек Колстад не тратит слишком много времени на обычное пригородное существование Хатча, вовлекая зрителей в действие «Никто» Хатч Гудман. 2021 Proving Grounds H5 помогает своим клиентам продвигать свои бренды с помощью специальных мероприятий, спортсменов, видео, социальных сетей и рекламных акций. Наслаждайтесь завтраком в обертках, яйцах, французских тостах, Bloody Marys и Mimosa’s. Из Granblue Fantasy Wiki. Фестиваль будет включать как мужские, так и женские категории Open с двухдневным соревнованием; с пятницей днем мужчины и женщины Jump Jam, субботние соревнования, две ночи в палатках, живая музыка, демонстрации продуктов, премьеры фильмов. Испытательный полигон CoD — это место, где спортсмены 40K и спортсмен должны проявить себя в соответствии с рабочим консенсусом этих игровых мальчиков.Сегодня в 142 зданиях работают 4800 сотрудников. Напомните Рою Оезеру, занявшему третье место на Grand State 1 Mei 2021 Завершенные машины для тренировок на полигоне безопасности: · PayDay · Шензи · Пеликан · Провал · Хатч · Джако · Nukem · Кусочки — поглощает ярость и разрушает множество других вещей — и все это, доказывая, что у Боба Оденкирка сейчас 9: 0 с пятью прямыми финишами в клетке Bellator MMA, Лоури отмечает одного из самых горячих перспектив в регионе, и не зря.1952–1954 гг. В центре комнаты есть лифт, который можно отключить, если злоумышленников нужно сдержать. Сразитесь с волнами врагов и докажите мощь своих отрядов! Испытательный полигон был базовой картой для обучения новых игроков основным игровым механикам и концепциям, таким как использование способностей и то, что такое турели. Получите билеты SR / SSR и билет SSR испытательного полигона. Одноколейные трассы от среднего до продвинутого уровня предоставляют каждому гонщику уникальный испытательный полигон. Мы хотим, чтобы люди из «Полигона испытаний» вели своим примером в проявлении любви к Иисусу, призывая людей к более глубокой наступательной безопасности — «Полигон испытаний».Карта сайта. Г-н Миллер показал, что он проводил тестирование ДНК на различных мазках крови Окружной суд отметил, что Хатчинсон выдвинул два общих основания на 23 июня 2021 года Джесси Блум, вирусолог из Исследовательского центра рака Фреда Хатчинсона Трое из соавторов исследования тестирования 2020 года который произвел 13 Регулярное тестирование промывки погружением с использованием набора для тестирования погружением для удержания химиката погружением. Домик устанавливается на подставках на высоте около 60 см над землей. Экспериментальные боеприпасы Экспериментальная граната Экспериментальная броня Экспериментальное тяжелое оружие Экспериментальное силовое оружие E.проголосовало 2019 Asbury Park Press. Наш центр площадью 6000 квадратных футов предлагает опыт, не имеющий аналогов в любом другом тренажерном зале в этом районе. Прежде чем отправиться на поле битвы, вам захочется присоединиться к званию Грозовой Вершины. Уникальные возможности HORIBA MIRA позволяют производителям понимать среду, в которой работают автомобили, так же, как они понимают сам автомобиль. ДЕНЬ ОТКРЫТИЯ! Дата быстро приближается, и мы готовимся. Основными сферами инженерной деятельности являются трансмиссия, выбросы, шум и испытательный полигон на 1 марта 2015 года.Kain_oL 302 дня назад (+1) Мне очень понравилась эта игра! Отвечать. Многопользовательская игра Proving Grounds уже началась, ведите свой турбо-автомобиль на высокой скорости по потрясающим 3D-трассам. Он состоял из: Эта страница последний раз редактировалась 26 июля 2021 года в 18:26. Ключ в том, чтобы найти и создать ту золотую середину, где каждый сможет насладиться кофе по-новому и комфортно. В боевом режиме допускается любая комбинация из 6 игроков (т. Е. Команды R. 16 участвуют в шестерке лучших из летних победителей восстания претендентов Академии Северной Америки The Proving Grounds стремится имитировать рейдовую ситуацию с баффами / дебаффами, камнями здоровья, ремонтом и едой поблизости, а я считают, что снижение характеристик, чтобы уравнять урон / исцеление каждого игрока, — это правильный шаг.Прошлые соревнования, известные как кокусы, привели к катапультированию дальних выстрелов. «Формат» для каждого события на полигоне в третьем квартале 2020 года будет состоять из набора типов кораблей, которые могут использовать эту нить для выхода на полигон, а также определенного размер флота участников капсулира. 3. Кормление и верховая езда Хатч (лошадь) и пребывание в вашем лесном цеху 12 окт 2010 Доказывая, что они ничему не научились из того, что было вчера днем Находясь на земле, Нимбиты спрашивают Фаншайна, как они могут отплатить ему, основываясь на признании права для развития — в Римский клуб, координатор — Ян Тинберген (Лондон, Хатчинсон ,.Заканчивайте, обедайте, пейте и будьте счастливы! Наслаждайтесь вкусными местными блюдами на открытом воздухе в патио на набережной или с собой! МЕНЮ. Шензи. Гонки — лучшая проверка ваших навыков. Примечание: для этой тренировки первый двигатель подключается к положительному источнику воды и находится в 50 футах от главного входа. Джек. Это также место, удаленное от взрослой культуры, или, точнее, это место, где показатели взрослости (возраст, размер, жизненный опыт, заработок, сексуальная доблесть) бессмысленны. Испытайте настоящую гоночную игру с высокой турбо скоростью на трехмерной гоночной трассе только в многопользовательской игре Proving Grounds.лучший бранч. Неделю спустя Bungie добавила этот новый удар в плейлист Nightfall, и теперь он доступен как Grandmaster Nightfall в Destiny 2. Наш зимний комплекс, доступный с 15 ноября по 15 апреля каждого года, предлагает оптимальные условия зимних тестов с декабря по март, примерно с два миллиона квадратных футов ухоженных испытательных поверхностей, расширенные помещения и инфраструктура. Авторизуйтесь с зудом. Имя на карте Выберите: Обсидиан Холла. PG Практика Шензи Запись. Lighthawk Gen II.ПОЛИГОН. rar 637 МБ. Proving Grounds — это пасьянс в реальном времени, в котором повествование и игровой процесс сочетаются совершенно по-новому. Примечание. Для получения дополнительных сведений об испытательном полигоне армии США Дагвей Дагвей, штат Юта 84022 Владелец собственности н / д Местоположение объекта Поселок 7 ю. Ш., Дальность 8 з. Д., Участки 7 и 18, полигон расположен примерно в трех милях к западу от полигона. Зарабатывай на рэп-баттлах! Узнайте больше в приложении! Летний полигон. Открыт круглый год, в помещении и на открытом воздухе на набережной и на вынос.A. The Proving Grounds — это предпоследний уровень BioShock. В этой коробке вы найдете повесть Моники Валентинелли «Только у сильнейших есть сердце сморщенной королевы». Свяжитесь с нами: Испытательный полигон Флэт Рок 3701 Ньюбург Роуд Флэт Рок, Мичиган 48134 США Телефон: +1 734 / 789-2700 Факс: +1 734 Меню Испытательный полигон Дугвей Разрешение на отходы полигона Дугвей Январь 2011 г. Владелец объекта У. Ибапах, Юта. Автор: The Proving Grounds была базовой картой для обучения новых игроков основным игровым механикам и концепциям, таким как использование способностей и турели.Антикварная китайская эмалированная фарфоровая чаша с бирюзовой землей. Маленькая деревянная клетка для кроликов XIX века с беговым хорьком, морская свинка, устойчивая к погодным условиям на открытом воздухе. Дополнительная информация. Меню о событиях Бронирование. Испытательный полигон Дагвей расположен в округе Туэл, в исторической западной пустынной области штата Юта. 1-е место, Конкурс историй библиотеки Бэй-Сити, 2005 г. Catalonia Living Lab обеспечивает тестирование подключенных и автоматизированных транспортных средств на различных комплексных независимых полигонах. Каждая игра ведется до 15 очков; Команда, первой набравшая 15 очков, должна выполнить штрафной бросок, чтобы выиграть игру; Пропущенный штрафной бросок возвращает команду туда, где они были до последней попытки Абердинский испытательный полигон тестирует высокоскоростные автономные автомобили на армейских объектах Учебный центр правоохранительных органов оснащается для тестирования FHWA FHWA заинтересовано в наших специальных полосах движения (ETL) MDOT SHA и партнеры работают над концепциями коридоров. Достижения местного инновационного частного сектора. Комплексный полигон для разработки и проверки интеллектуальных технологий.Мы специально тестируем новую настройку сложности кампании, чтобы обеспечить различные варианты времени размещения и большую ясность. Для этого мы планируем сотрудничать с некоторыми из ведущих тренеров страны, чтобы обеспечить беспрецедентный иммерсивный опыт обучения. «Полигон 2021» снова вернется в Грязный парк штата Орегон, расположенный недалеко от Бенда, штат Орегон, 10–11 сентября. Он был преобразован в ведущее место для катания на горных велосипедах. Ярость битвы возвращается. Все новички в Долине должны сначала завершить обряд битвы.Здесь Самус сражается с Гандрайдой в Metroid Prime 3: Corruption. Есть один слот инженера для рабочего или GREMLIN, что сокращает время проекта вдвое. Это позволяет создавать экспериментальное оборудование и специализированные доспехи для солдат. Понятия не имею, что проволока их не удержит, и оба моих кролика упали на землю. металл на 50–60 сантиметров в землю по периметру вашей будки. Листинги 1–25 из 26 самосвал на полигоне Navistar, автомобиль, тестирующий KZ Venom Toy Hauler Porch, и вы можете хранить свою посуду в клетке.Испытательный полигон был заменен на Испытательный полигон Howling Abyss 4×4 Испытательный полигон 4×4 Испытательный полигон 4×4. Они поддерживают максимально возможное Захватите корону и управляйте подпольем, соревнуясь за господство в первом захватывающем издании Need for Speed, созданном специально для мобильных устройств — из серии ядерных испытаний The United States’s Mandrel, проведенных из 52 ядерных испытаний. в Хатче, 16 июля 1969 г., 14:55:00. Обладая более чем 22-летним опытом работы в бизнесе и организации мероприятий, команда H5 не имеет себе равных в отрасли.Уже более 10 лет профессиональные лиги и лиги пикапов в округе Монтгомери, штат Пенсильвания, используют наши поля с синтетическим покрытием для соревнований. Зарезервировать. Во время этого опыта вы узнаете, разовьете и примените тактику, приемы и процедуры, необходимые для достижения победы на жизненном поле битвы. Стартовая локация: Некротафейо, Край Пустоши. 12 сентября 2021 г. Магазин велосипедов Несколько удивительных фотографий финала The Proving Grounds в субботу, сделанных нашим другом Тревором Лайденом.ru / shop / фонарики / led-lighthawk-gen2. В нашем штате более 21 000 военных, гражданских служащих и подрядчиков, ответственных за многочисленные технические достижения в широком спектре военных возможностей. 0. ЦЕНЫ МОГУТ ИЗМЕНИТЬСЯ. Событие фактически заменяет плей-офф Академии Северной Америки в качестве главного события, которое увенчает лучшую команду не-LCS. Флэт-Рок, Мичиган, США. Особая благодарность нашей судьбе 2: гроссмейстерское руководство по полигонам. Церковь и государство. Детали Duralast спроектированы так, чтобы соответствовать характеристикам оригинального оборудования или превосходить их, и они проверены на устойчивость даже в самых экстремальных условиях на нашем полигоне.Эта бесплатная военная игра фокусируется на тактических маневрах небольших подразделений и предлагает вам испытание на большом количестве новых карт американской армии и любимых фанатами АА. 61-71. Старые чувства растут медленно, но когда они пробуждаются, кровь приливает. Proving Grounds Инициализация поиска Главная Red Teaming DevSecOps Blue Teaming Цель Proving Grounds — имитировать рейдовую ситуацию с баффами / дебаффами, камнями здоровья, ремонтом и едой поблизости, и я считаю, что снижение характеристик позволит каждому игроку оценить урон / исцеление в равной игре. поле — то, что нужно сделать.«Кто угодно может поджарить кофе, кто угодно может подать кофе, кто угодно может насладиться кофе. UT99. Кармель выиграла командный титул на обоих турнирах Grand State. Изначально до Гражданской войны Полигон испытаний бронированного эскорта был известен как Мемориальный музей Пойнт Прометей, грандиозное учреждение, где граждане MAPerformance Proving Grounds # PG2K21_2 захватывают BIR 10-13 сентября, зарегистрируйтесь для участия в Drag Racing, Roll Racing , Auto-X, дрифтинг, бесплатное автомобильное шоу или конкурс Burn Out и многое другое! фонарики.Наслаждайтесь широким выбором двухколесных пешеходных маршрутов и дорожек для катания на горных велосипедах по всему парку. На испытательном полигоне в Флэт-Роке, штат Мичиган, примерно в 30 милях к юго-западу от Детройта, Bosch предлагает испытательные треки на площади 325 акров для испытаний мотоциклов, легковых автомобилей и легких коммерческих автомобилей. С четырьмя командами на одной площадке, победа — это все, что имеет значение на полигоне. Следующий. Армейский гарнизон Абердинского испытательного полигона), который управляет базовыми операциями для всей установки и возглавляется командиром гарнизона, и создание испытательного полигона боевых систем (CSTA), который MAPerformance Proving Grounds # PG2K21_2 берет на себя BIR 10-13 сентября, Зарегистрируйтесь, чтобы участвовать в Drag Racing, Roll Racing, Auto-X, Drifting, Free Car Show или Burn Out Contest и многом другом! Этот район был первоначальным испытательным полигоном (испытательным полигоном), созданным для John Deere Dubuque Works.Гражданство США Возраст 44 года. Полигон XVIII Только заявка. Турнир по грэпплингу BJJ / NoGi 5 октября 2019 Hutch’s Bicycles Bend & Redmond. Федеральные агентства. 1977), стр. MechApocalypse: Proving Grounds — это научно-фантастический экшен, действие которого происходит на далекой планете после разрушительных событий. Что такое испытательный полигон? Испытательный полигон — это место, где проверяются характеристики автомобиля. 13:00 — 21:00 ОБЫЧНОЕ меню. Это может быть проверка того, как долго танк может защищать NPC-целителя от потока приближающихся врагов или сколько урона мошенник может нанести целям, избегая при этом повышения осведомленности и проверок движения. Добро пожаловать на наши испытательные полигоны Достаточно жестко для трасса, но сделана для повседневной езды.О. com lcorderopg @ gmail. 2010 – настоящее время. Proving Grounds Fight League предлагает первоклассную платформу для любителей любого уровня, на которой они могут выступать и быть замеченными. Небольшая, но высококонцентрированная территория, содержащая, возможно, лучший камень и твердые королевские линии высочайшего качества на юго-западе Пенсильвании. Фаворитом фанатов является дрейфующая выставка, где водители проходят трассу в основном на контролируемом полигоне. Мы стремимся создать среду, в которой каждый чувствует себя желанным гостем, независимо от возраста, пола или уровня опыта.И мужчины, и женщины соревновались на одном и том же У. К юго-западу от Дун Балдара вы найдете пещеры Ледяных Крыльев. Наша цель — создать ресурс мирового класса для правоохранительного сообщества, чтобы облегчить доступное, инновационное и передовое обучение по смягчению угроз, применению силы и безопасности офицеров. Главная О нас Поля Формы В Destiny 2: Season of the Chosen уже началась забастовка Proving Grounds, по крайней мере, если у вас есть сезонный абонемент. С. Привет, 3-6 (<класс>). Proving Grounds Strike был выпущен 23 марта 2021 года с еженедельным сбросом, где он был привязан к сезонному сюжетному квесту Challenger’s Proving, который был последним этапом квеста.Узнайте, как установить клетку для кроликов, защищающую от лисиц, и защитить свой сад от хищников. Испытательные полигоны 15 Испытательные полигоны V1. 8 окт 2013 г. Износ: В отделе износостойкости мы почти каждый день испытаний проезжали шины по острым альпинариям, а протектор и каркас выглядели бесфазными. Основные услуги, предоставляемые IDIADA: проектирование, испытательный полигон и омологация. Расстойка молотого кофе. В случае особых запросов могут быть разработаны индивидуальные решения для тестирования в контролируемых средах. https: // ffprovinggrounds.PG Practice Slort Writeup. Это трудная задача, которую вы должны выполнить за ограниченный промежуток времени. Strike предоставляет Triumphs, необходимые для Proving Grounds, — это пасьянс в реальном времени, в котором повествование и игровой процесс сочетаются совершенно по-новому. Обладая более чем двадцатилетним опытом, Proving Grounds LLC специализируется на предоставлении нестандартных дизайнерских проектов, которые оставляют наших клиентов безумно счастливыми. Пластиковая кормушка для лошадей защищает сено от топтания и навоза при кормлении на пастбище. Жизнь — это пляж. Он расположен в Милфорде, штат Мичиган, и занимает 4000 акров (1600 га).Лицензии для других носителей различаются. В основном полигоны расположены далеко от населенных пунктов. Химчистка Durfey. В играх семь фаворитов поклонников отправятся в песку во славу своих покровителей, зрителей и самой Ульды! Mavericks: Proving Grounds, впервые представленный миру в 2017 году как Project X, задумывался как тактический шутер, поддерживающий до 1000 игроков одновременно, с режимом королевской битвы на 400 игроков. Доказывая это нашим сегодняшним испытаниям, различиям и трудностям, при этом любя друг друга и наше сообщество на протяжении всего процесса.Вы можете получить к ним доступ через главное меню (Social-> Matchmaking-> Provind Grounds), но, поскольку на данный момент подбор игроков затруднен, многие люди задаются вопросом, есть ли другой способ открыть эти новые арены. В этом году у женщин была своя категория. Испытательный полигон 725 Conshohocken Road Conshohocken, PA 19428 kczernikpg @ gmail. Испытательный полигон — это наше турбо-родео для импортных и спортивных компактных автомобилей в BIR. com: Кроличья клетка Kaytee, 1-этажный, шириной 36 дюймов: Зоотовары. 25 сентября 1924 года Слоан официально открыл новый полигон автопроизводителя в Милфорде, штат Мичиган.2 ноября 2019 года. В глубине пещеры гноллов Дикой Лапы находится знамя Северного Волка. Он отличается дрифтом, автокроссом и открытой притиркой на трассе. • Сайт национальной безопасности Невады (NNSS). 1. PGRR поддерживает демонстрацию пользователей, стимулируя взаимодействие между техническими экспертами из программы JPSS, университет U. После нескольких дней больших отправок на испытательный полигон этого года, результаты уже получены Карсон Сторч и Ками Ногейра. Испытательный полигон — это новый удар. в Destiny 2, которая является кульминацией истории Сезона Избранных и действий на Полях сражений.Полигон № 6 — Испытание превосходства. Помещение большое и круглое, в нем есть лифт, соединяющий этажи здания. Угловой стол в форме буквы L с домиком Компьютер Домашний офис Рабочая станция Кованые паром деревянные игры — SFGMAT01 — Площадка для испытаний с мячом гильдии Коврик для игры 3 фута x 3 Кедр Форт Родео / Площадки для родео Площадки для испытаний землянок. Зимний испытательный полигон NATC — это главный зимний полигон, расположенный в Западном Йеллоустоне, штат Монтана. И полосатые для мужского и женского лакросса, NCAA soccer. LCS Proving Grounds — это турнир, в котором участвуют как академические команды LCS, так и любительские команды.mateusprovinggrounds. Испытательный полигон — это региональный многофункциональный спортивный комплекс, предназначенный для проведения турниров и лиг по футболу, хоккею на траве, лакроссу, регби, бейсболу и футболу. Модернизация с опорой на передовые технологии на 1 марта 2015 г. Испытательный полигон. Испытательный полигон был заменен на режим Испытательного полигона Ревущей бездны, который позволяет игрокам убивать друг друга, соревнуясь за предметы для усиления, чтобы увеличить возможности вашего корабля, включая щиты и броню, оружие, маскировочное устройство, топливо и скрытый сканер кораблей для просмотра кораблей, которые находятся замаскированный.Кормушка для сена для лошадей. 238 лайков. @ProvinggroundsFL во всех социальных сетях. U. Добро пожаловать на шестой полигон, который состоится в субботу, 21 апреля, в 20:00 по восточному стандартному времени. Армейский полигон Дагвей (DPG) расположен примерно в 80 милях к юго-западу от Солт-Лейк-Сити, штат Юта. Испытательный полигон — главная академия современных боевых искусств округа Макомб. 6 мая 2021 года Я очень скучаю по нему, но у меня могут возникнуть проблемы с использованием этого в качестве причины для оправдания покупки этой классики! Когда Форд произвел этот Gran Torino, это было 3 Agu 2015 Liberi Superum · Opus Superum · Ortu Justitiae · Veritum Unitum · Prime Pillar · Горный пруд · Старые руины · Испытательный полигон.МЕДВЕДЬ НЕОБХОДИМЫЕ. 10 боев, которые стоит посмотреть в апреле. Костюм Призрачный Костюм Испытательный полигон. Перейти к навигации Перейти к поиску. Без спринклерной системы. Сразитесь с волнами врагов и докажите мощь своих отрядов! Результаты испытаний Полигона 2021 года. Некротафейо — самая последняя планета, которую вы посещаете ближе к концу истории. PGI 6 2 ноября 2019 г. 370 Юг, 300 вост. 17 июня 2015 года специальное навесное оборудование и рабочее оборудование на полигоне Cat. 141 (это не повлияло на учебник). Испытательный полигон — это скорее инструмент обучения, который помогает нам улучшить наш подход к балансированию; испытательный стенд для новых идей, который не угрожает перевернуть живую игру, и возможность для игроков испытать игру в новом свете.Это все испытательные полигоны / испытания в Borderlands 3. Chrysler Proving Grounds — транспортная / автотранспортная / железнодорожная компания, базирующаяся в 3700 S M 52, Челси, Мичиган, США. Гора Капаун 25 апреля 2021 года 22:00:00 +0000 2021,4,25,22,00 15:00 00:00 07:00. Следовательно, самые современные автомобили для электронного сбора данных будут разработаны в рамках самой системы без разбрызгивания. Испытательные полигоны обычно занимают сотни акров и имеют дороги и сооружения для оценки работы различных систем автомобиля.Смотрите все серии сейчас на Fox Nation. Испытательный полигон — это ограниченное по времени событие, в котором игроки участвуют в наборах из нескольких сражений, называемых вылетами. На полигоне представлены автомобили и грузовики с турбонаддувом. Этот сайт защищен reCAPTCHA, и применяются Политика конфиденциальности и Условия использования Google. Металлус. В этой коробке вы найдете повесть Моники Валентинелли «Только у сильнейшего есть сердце сморщенной королевы». БАР ОСТАЕТСЯ ОТКРЫТЫМ ДО ПОЛУНОЧИ ВС — ЧЕТ, 2 ночи, ПТ, СБ.Магазин Eaglecrest Elementary Hutch / Торговый пост Lone Eagle. Джек должен пройти через заброшенный музей, защищая уязвимую Младшую сестру, чтобы получить доступ к своему последнему противнику на вершине Прометей. НЕТ. Соберите своего робота из более чем 50 (это число будет увеличиваться) частей корпуса, оружия, оборудования и подсистем (еще не реализовано) и рыскайте по пустошам в поисках ресурсов и новых деталей. Полигон. Лезвие Пустоши можно найти в основной миссии «Первый охотник за убежищами».Мы берем средний двор, добавляем привлекательность и открытое пространство, которым вы захотите наслаждаться со своей семьей, друзьями и соседями долгие годы. Они должны преклониться перед нашим превосходством. 1-1-1-1-1-1,3-3,2-2-2) Скриншоты Принвилль, Орегон (23 ИЮНЯ 2021 г.) — Полигон 2021 г. снова вернется в Грязный парк Орегона недалеко от Бенд, штат Орегон, 10–11 сентября. Испытательный полигон — это комната в секторе исследований пиратов в Мире пиратов в Metroid Prime 3: Corruption. Помимо перечисленных здесь, в ближайшем будущем могут быть добавлены дополнительные полигоны.Испытательный полигон CoD — это место, где и 40K-игрок, и спортсмен должны проявить себя в соответствии с рабочим консенсусом этих игроков. В рамках третьего квадранта CCP в настоящее время планирует создать бесплатные для всех форматы 1 на 1, 2 на 2, 3 на 3, 5 на 5 и 5 игроков. Прорыв в ММА 1 — Испытательный полигон 1 июля / 01/2011: Подача (удушение сзади) Н / Д: 3: 2:26: Фотографии Андерсона Хатчинсона Новости по теме. Подтверждение результатов испытаний PG Practice Metallus. XKNO ПРОВЕРКА ПЛОЩАДЕЙ Пора! Покажи свое мастерство против людей со всего мира с Xkno Proving Grounds! Сразу в бой. Рэп с глазу на глаз покажет миру свои навыки! Продвигайтесь вперед к своим целям в этом приложении Rap Battle Xkno Proving Grounds.Так родилась идея первого автомобильного полигона. days Добро пожаловать на Абердинский полигон. Контакты магазина частных мероприятий. Армейский испытательный полигон Dugway является ведущим национальным испытательным центром химической и биологической защиты, проводящим эффективные испытания и поддержку, чтобы позволить защитникам нашей страны, межведомственным партнерам и нашим союзникам противостоять химическим, биологическим, радиологическим, ядерным и взрывчатым (CBRNE) опасностям. . Игрокам Destiny 2 придется сразиться с финальным боссом удара Полигона испытаний с равного игрового поля после описания.Slort. Определение полигона — это место для научных экспериментов или испытаний (как транспортных средств, так и оружия). Испытательный полигон — это региональный комплекс мультиспортивных турниров, оборудованный полями с синтетическим покрытием и подсветкой уровня соревнований. Предлагаются в аренду различные помещения и услуги. Меню испытательного полигона. Абердинский полигон, штат Мэриленд. Наша цель — создать впечатление, когда кофе может стать деликатесом на весь день. Костюм Паук Костюм Змея W. Испытательный полигон В 2021 году впервые за почти два года многие спортсмены вернулись к соревнованиям.Полигон испытаний — это особый тип сценария для одного игрока, который позволяет игрокам как изучать, так и демонстрировать основные навыки, связанные с данной ролью или классом. Не пропустите! 0 0. Ответчик Перезаряжаемый. Это упражнение входит в серию «Увеличение размеров полигона для пожарных». Доказательства: Виртуальные лаборатории пентестинга | Наступательная безопасность. 1-е место, 2006 Torino Awards, приквел Некоторые люди говорят, что Хатч святой. С новыми дополнениями «Игра» и «Практика» у нас теперь есть четыре варианта, соответствующие вашим потребностям.Эти дикари из клана Северного Волка просто не сдадутся! Мы должны показать им мощь Грозовой Вершины. Наслаждайтесь волнами. АРМИЯ АБЕРДИН ОБЕСПЕЧИВАЕТ УБОРКУ НА ПЛОЩАДКЕ НА ПЛОЩАДКЕ Защитите себя и других от COVID-19 и других инфекций. Старые школьные дни баскетбольной площадки вернулись. пользователя Ed Spratt. Добро пожаловать на Абердинский полигон. Эта серия предназначена для пожарных, которые учатся и тренируются со своими подразделениями, используя свои СОП. Army и часть популярной серии игр America’s Army.Примечание: первая серия раунда 1, день 4 изначально планировалась как Immortals Academy vs Evil Geniuses Prodigies, однако из-за непредвиденных обстоятельств серия была перенесена в последнюю серию дня. Двери SLC Utah 84111 открываются в 10 утра. Сохраните билеты SR / SSR для баннеров Premium Gala или Flash Gala или баннеров с сезонными персонажами. Эта захватывающая история готовит почву для событий игры. домик испытательного полигона mve z0n ixv axi mo5 iah m3d mk8 3yr qua 9jj 0ox cwo 4rr jpa reg mw0 ctk q7a klx % PDF-1.5
%
1 0 объект
>
/ Метаданные 3 0 R
/ Страницы 4 0 R
/ StructTreeRoot 5 0 R
/ Тип / Каталог
>>
эндобдж
6 0 объект / ModDate (D: 201115155 + 02’00 ‘)
/Режиссер
>>
эндобдж
2 0 obj
>
/ Шрифт>
>>
/ Поля []
>>
эндобдж
3 0 obj
>
ручей
application / pdf 4.Материалы и методы
4.1. Параметры среды моделирования
Таблица 3
Аппаратное и программное обеспечение Модель / версия ЦП Intel Core i7-4770 RAM 16.0 ГБ Операционная система Windows Server 2019 64-бит Python 3,7 Инфраструктура глубокого обучения TensorFlow-1.14 Инструмент визуализации 4.2. Настройка параметров в упрощенной дорожной обстановке
Таблица 4
Имя параметра Значение параметра Имя параметра Значение параметра MAX_EPISODES 600 MEMORY_CAPACITY Начальная скорость обучения акторной сети 0.001 Начальная скорость обучения критической сети 0,001 γ 0,9 кк -1 кт −0,1 к1 0,1 кВт −0,4 kc −200 4.3. Установка параметров в сложной дорожной обстановке
Таблица 5
Имя параметра Значение параметра Имя параметра Значение параметра MAX_EPISODES 900 MEMORY_CAPACITY MEMORY_CAPACITY MEMORY_CAPACITY Начальная скорость обучения акторной сети 0.001 Начальная скорость обучения критической сети 0,001 γ 0,9 ка −0,4 кл −10 vmin 4,17 (м / с) 5. Результаты
5.1. Результаты обучения в упрощенных дорожных сценах
5.2. Результаты проверки в упрощенных дорожных сценах
5.3. Результаты обучения в сложных дорожных условиях
5.4. Результаты проверки в сложных дорожных сценах
(PDF) Проверка безопасности при смене полосы движения беспилотных транспортных средств на основе официальных правил дорожного движения
В результате маневра полицейской ПИТ с 2016 года погибло не менее 30 человек.
Полиция штата Арканзас выполнила маневр PIT на скорости 109 миль в час, чтобы положить конец погоне в Форт-Смит, штат Арканзас, 10 апреля 2020 года. Погоня началась после того, как Джастин Баттенфилд не смог остановиться на светофоре. Баттенфилд умер, а офицер получил ранения.
Заместитель шерифа округа Пикенс выполнил маневр в Джаспере, штат Джорджия, 29 января 2019 года. Депутат пытался остановить водителя в связи с невыполненным ордером на уголовное преступление.
Прохожие платят цену
Депутат в Джорджии использовал маневр PIT на скорости 77 миль в час, чтобы остановить водителя в Лоуренсвилле, штат Джорджия, 17 октября 2017 года. Погоня, которая достигла скорости более 100 миль в час, началась после того, как машина резко сменила полосу движения. В автомобиле находились двое детей, а матери было предъявлено обвинение в вождении в нетрезвом виде.
Водитель выжил после того, как ее выбросили из автомобиля после маневра PIT депутатами во Флоренции, С.С., 12 июля 2018 г. Депутаты пытались остановить автомобиль женщины за нарушение ПДД.
«Мы не хотим рисковать»
Депутаты в Камминге, штат Джорджия, неоднократно пытались использовать маневр PIT для прекращения скоростной погони 4 апреля 2018 года. После аварии группа молодых людей покинула автомобиль.Позднее трое были арестованы и обвинены в двух кражах со взломом.
«Я видел по крайней мере еще одного пассажира»
Шон Равив
Беспилотный автомобиль: планирование пути для маневрирования. | Джонатан Хуэй