Для чего нужна блокировка межосевого дифференциала: Самые расхожие заблуждения о полном приводе — журнал За рулем
Самые расхожие заблуждения о полном приводе — журнал За рулем
Оказывается, многие владельцы внедорожников понятия не имеют, что такое крутящий момент и в какой пропорции он делится между колесами. А еще не знают, как на самом деле устроен дифференциал. ЗР помогает разобраться во всех нюансах полноприводной трансмиссии.
«Господь Бог вычисляет дифференциалы эмпирически».
Альберт Эйнштейн
Материалы по теме
Обилие комментариев к материалам о распределении моментов в трансмиссиях автомобилей, особенно полноприводных, и радует, и огорчает. Народ интересуется техникой — это хорошо. А вот постоянно ощущать влияние безграмотных блогерских стереотипов на массовое сознание — это обидно. Впрочем, подобное явление подметил еще изобретатель теории эволюции, причем задолго до интернетов. Мол, «уверенность чаще порождается невежеством, нежели знанием».
Что ж, попробуем пробежаться еще разок по основным болевым точкам в массовом сознании.
Итак, вспоминаем основные заблуждения.
Крутящий момент на вывешенном колесе не может равняться нулю: за чей же счет оно вращается-то?
Материалы по теме
Если не разобраться в этом, то дальше можно не читать. Главная мысль проста: момента без сопротивления не бывает! Поэтому момент на валу двигателя, молотящего вхолостую, равен нулю: он не совершает никакой полезной работы. Точно так же на колесе, зависшем в воздухе, никакого момента нет. Конечно, можно порассуждать насчет сил трения и прочих негативных факторов, которые приходится преодолевать, но мы сразу уточнили, что подобные потери не принимаем во внимание.
Межколесные дифференциалы задают колесам равные угловые скорости.
Ничего подобного: дифференциал (от лат. differentia — разность, различие) — это механизм, обеспечивающий вращение ведущих колес именно с разными скоростями (например, в повороте). Простенькие игрушечные автомобильчики зачастую плохо ездят по кругу именно потому, что в них нет дифференциалов, а потому колеса, проходящие разный путь, вынуждены проскальзывать или пробуксовывать. Дифференциал выравнивает не угловые скорости, а моменты. Если он делит крутящий момент поровну, его называют симметричным.
Если у Нивы (будь то Chevrolet Niva или Лада 4х4) одно колесо повисает в воздухе, то за счет остальных трех она спокойно поедет дальше, поскольку момент постоянно поступает на все четыре колеса. В данной ситуации на каждое из трех оставшихся колес придется при этом по 33,3% момента.
Выражение «момент поступает» не вполне корректное: напоминаем, что без сопротивления никакого момента на колесе быть не может. А Нива в данном случае не стронется с места, поскольку нулевой момент на зависшем колесе тут же отразится на всех остальных: межколесные и межосевой дифференциалы изначально делят его поровну — по 25% каждому. Чтобы ехать дальше, надо заблокировать межосевой дифференциал. В этом случае на оси с зависшим колесом момент останется нулевым, зато на другой оси на каждое колесо придется половина от усилий мотора.
А Нива в данном случае не стронется с места, поскольку нулевой момент на зависшем колесе тут же отразится на всех остальных: межколесные и межосевой дифференциалы изначально делят его поровну — по 25% каждому. Чтобы ехать дальше, надо заблокировать межосевой дифференциал. В этом случае на оси с зависшим колесом момент останется нулевым, зато на другой оси на каждое колесо придется половина от усилий мотора.
Самый надежный тип привода…
После блокировки дифференциала момент распределяется пополам.
Не после, а до блокировки! После блокировки распределение моментов определяется только реальной дорожной ситуацией. Скажем, после блокировки межколесного дифференциала моменты на колесах этой оси распределяются пропорционально нагрузке и силам сцепления, но никак не поровну.
Пока межосевой дифференциал не заблокирован, крутящий момент распределяется между осями поровну (если, конечно, дифференциал симметричный). Как только заблокировали, демократия заканчивается: теперь распределение момента по осям пойдет пропорционально реальной нагрузке.
Как только заблокировали, демократия заканчивается: теперь распределение момента по осям пойдет пропорционально реальной нагрузке.Пока межосевой дифференциал не заблокирован, крутящий момент распределяется между осями поровну (если, конечно, дифференциал симметричный). Как только заблокировали, демократия заканчивается: теперь распределение момента по осям пойдет пропорционально реальной нагрузке.
Если ось с заблокированным дифференциалом — аналог железнодорожной колесной пары, то и момент на обоих колесах всегда одинаковый! Ведь этот механизм уже представляет собой единое целое, а потому не может быть так, чтобы слева момент был, а справа куда-то пропал… В каком месте вала момент, передаваемый для нагруженного колеса, превращается в ноль для незагруженного? Этого же теоретически не может быть.
Материалы по теме
В том-то и дело, что может! Представьте себе, для упрощения, вместо заднего моста с заблокированным дифференциалом что-нибудь попроще — допустим, черенок от лопаты. Вообразите, что вы держите его посередке и при этом пытаетесь вращать вдоль продольной оси, то есть прикладываете момент. Пусть один конец черенка буравит асфальт, а второй находится в воздухе. Согласитесь, что конец черенка, который грызет асфальт, будет изнашиваться у вас на глазах, поскольку там есть сопротивление. А тот конец, что висит в воздухе, переживет всех: нет сопротивления — нет момента. Он останется свеженьким и чистеньким, хотя и вращается с той же скоростью, что и весь черенок. Точно так же себя ведет и ось с заблокированным межколесным дифференциалом.
Вообразите, что вы держите его посередке и при этом пытаетесь вращать вдоль продольной оси, то есть прикладываете момент. Пусть один конец черенка буравит асфальт, а второй находится в воздухе. Согласитесь, что конец черенка, который грызет асфальт, будет изнашиваться у вас на глазах, поскольку там есть сопротивление. А тот конец, что висит в воздухе, переживет всех: нет сопротивления — нет момента. Он останется свеженьким и чистеньким, хотя и вращается с той же скоростью, что и весь черенок. Точно так же себя ведет и ось с заблокированным межколесным дифференциалом.
AWD в сравнении с 4WD выдает меньший крутящий момент.
Тут даже спорить, в общем-то, не с чем. Чем определяется момент, мы повторяем в каждом втором абзаце. Можно лишь еще раз отметить, что обозначения такого рода в целом являются маркетинговыми, условными. По большей части в реальной жизни AWD — это «моноприводники», у которых есть возможность подключать вторую ведущую ось. А 4WD — это машины с постоянно подключенными осями с заданным изначально распределением момента между осями (например — 50 на 50, у которых есть возможность блокировать межосевой дифференциал). Кто из них что куда «выдает», в каждом случае нужно разбираться индивидуально, а не кивать на аббревиатуру.
Кто из них что куда «выдает», в каждом случае нужно разбираться индивидуально, а не кивать на аббревиатуру.
Всем удачи на любых дорогах!
Что такое дифференциал и для чего нужны блокировки
Такая передача момента возможна благодаря применению так называемого планетарного механизма. В автомобилестроении, дифференциал является одной из ключевых деталей трансмиссии. В первую очередь он служит для передачи момента от коробки передач к колёсам ведущего моста.
Почему для этого нужен дифференциал ? В любом повороте, путь колеса оси, двигающегося по короткому (внутреннему) радиусу, меньше, чем путь другого колеса той же оси, которое проходит по длинному (внешнему) радиусу.
В результате этого, угловая скорость вращения внутреннего колёса должна быть меньше угловой скорости вращения внешнего колеса. В случае с не ведущим мостом, выполнить это условие достаточно просто, так как оба колеса могут не быть связанными друг с другом и вращаться независимо.
Но если мост ведущий, то необходимо передавать крутящий момент одновременно на оба колеса (если передавать момент только на одно колесо, то возможность управления автомобилем по современным понятиям будет очень плохой).
При жесткой же связи колёс ведущего моста и передачи момента на единую ось обоих колёс, автомобиль не мог бы нормально поворачивать, так как колеса, имея равную угловую скорость, стремились бы пройти один и тот же путь в повороте.
Дифференциал позволяет решить эту проблему: он передаёт крутящий момент на раздельные оси обоих колёс (полуоси) через свой планетарный механизм с любым соотношением угловых скоростей вращения полуосей. В результате этого, автомобиль может нормально двигаться и управляться как на прямом пути, так и в повороте.
Однако, ввиду физики устройства, у планетарного механизма есть очень нехорошее свойство: он стремится передать полученный крутящий момент туда, куда легче. Например, если оба колеса моста имеют одинаковое сцепление с дорогой и усилие, необходимое для раскручивания каждого из колёс одинаковое, дифференциал будет распределять крутящий момент равномерно между колёсами.
Но стоит только появится ощутимой разнице в сцеплении колёс с дорогой (например, одно колесо попало на лёд, а другое осталось на асфальте), как дифференциал тут же начнёт перераспределять момент на то колесо, усилие для раскрутки которого наименьшее (то есть на то, которое находится на льду).
В результате, колесо, находящееся на асфальте перестанет получать крутящий момент и остановится, а колесо, находящееся на льду примет на себя весь момент и будет вращаться с увеличенной угловой скоростью, причем планетарный механизм будет играть роль редуктора, повышающего скорость вращения этого колеса.
Естественно, это явление сильно ухудшает проходимость и управляемость автомобиля. Ведь по логике вещей, в рассмотренной ситуации момент желательно передавать на колесо, расположенное на асфальте, чтобы автомобиль мог продолжить движение.
Ведь по логике вещей, в рассмотренной ситуации момент желательно передавать на колесо, расположенное на асфальте, чтобы автомобиль мог продолжить движение.
В полноприводных автомобилях дифференциалом обычно оборудованы два моста, а зачастую дифференциал можно обнаружить еще и между мостами (межосевой дифференциал). Таким образом, мы получаем схему трансмиссии, в которой присутствуют целых три дифференциала: два мостовых и один межосевой.
Последний необходим для постоянного движения с полным приводом и передачей момента на все четыре колеса. Ведь в повороте колёса рулевого моста (обычно переднего) имеют совсем другие угловые скорости, нежели чем колёса заднего моста.
Межосевой дифференциал призван передавать крутящий момент от коробки передач к обоим ведущим мостам с разным соотношением угловых скоростей. Такая схема с тремя дифференциалами является одной из самых распространённых схем для постоянного полного привода (Full time 4WD).
Однако, это уже тема другого раздела. В данном разделе нас интересует дифференциал и его свойства. Возвращаясь к вышеописанному проблемному свойству планетарного механизма, интересно рассмотреть ситуацию, когда полноприводный автомобиль с межосевым дифференциалом одним из четырёх колёс попал на тот же лёд (или в скользкую яму). Что тогда произойдёт ?
В данном разделе нас интересует дифференциал и его свойства. Возвращаясь к вышеописанному проблемному свойству планетарного механизма, интересно рассмотреть ситуацию, когда полноприводный автомобиль с межосевым дифференциалом одним из четырёх колёс попал на тот же лёд (или в скользкую яму). Что тогда произойдёт ?
Дифференциал моста, колесо которого находится на льду, отдаст весь полученный крутящий момент на это колесо. Межосевой дифференциал, в свою очередь, тоже стремится передать крутящий момент туда, куда легче. Естественно, межосевому дифференциалу легче отдать момент на мост с прокручивающимся на льду колесом, нежели чем на мост, колёса которого имеют хорошее сцепление с дорогой и могут двигать автомобиль.
В результате, весь крутящий момент от двигателя и коробки передач пойдёт на раскручивание единственного колеса, находящегося на льду. Остальные три колеса остановятся и не будут получать никакого крутящего момента от дифференциалов.
Итог: из четырёх ведущих колёс осталось только одно, которое проскальзывает на льду — полноприводный автомобиль «застрял». Как же заставить дифференциалы передавать крутящий момент на колёса с более хорошим дорожным сцеплением ? Для этого были разработаны различные способы частичной и полной, ручной и автоматической блокировки дифференциалов, которые будут рассмотрены ниже.
Как же заставить дифференциалы передавать крутящий момент на колёса с более хорошим дорожным сцеплением ? Для этого были разработаны различные способы частичной и полной, ручной и автоматической блокировки дифференциалов, которые будут рассмотрены ниже.
Основной целью блокировки дифференциала является передача необходимого крутящего момента обоим его потребителям (полуосям или карданам). Существуют принципиально разные методы решения данной задачи.
Полная (100%-я) ручная блокировка.
При таком типе блокировки, дифференциал фактически перестаёт выполнять свои функции и превращается в простую муфту, жестко связывающую полуоси (или карданы) между собой и передающую им одинаковый крутящий момент с одинаковой угловой скоростью. Для того, чтобы полностью заблокировать классический дифференциал, достаточно либо заблокировать возможность вращения сателлитов, либо жестко соединить между собой чашку дифференциала с одной из полуосей. Такая блокировка как правило реализована при помощи пневматического, электрического или гидравлического привода, управляемого водителем из салона автомобиля.![]() Применяется как для мостовых, так и для межосевых дифференциалов. На картинке изображена схема блокировки компании ARB для мостового дифференциала, в которой блокируются сателлиты.
Применяется как для мостовых, так и для межосевых дифференциалов. На картинке изображена схема блокировки компании ARB для мостового дифференциала, в которой блокируются сателлиты.
Включать подобного рода блокировки можно только при полностью остановленном автомобиле. Пользоваться ими надо крайне аккуратно, так как усилия мотора вполне достаточно чтобы «сорвать» механизм блокировки или поломать полуось. Применять такие блокировки желательно только на небольших скоростях для передвижения по труднопроходимой местности, так как при их применении в мостах (особенно в рулевых), автомобиль очень сильно теряет в управляемости. Как правило, жесткими блокировками мостовых и межосевых дифференциалов оборудуются полноценные рамные внедорожники, такие как Toyota Land Cruiser, 4Runner (Hilux Surf), Mercedes G-Class и. т. п.
Limited Slip Differentials — дифференциалы с ограниченным «проскальзыванием» (одной полуоси относительно другой).
Автоматическая блокировка с использованием
вискомуфты в качестве «Slip Limiter».
В этом случае применяется блокировка одной из полуосей с чашкой дифференциала. Вискомуфта монтируется соосно полуоси таким образом, что один её привод жестко крепится к чашке дифференциала, а другой — к полуоси. При нормальном движении угловые скорости вращения чашки и полуоси одинаковые, либо незначительно отличаются (в повороте). Соответственно, рабочие плоскости вискомуфты имеют такое же небольшое расхождение в угловых скоростях и муфта остаётся разомкнутой. Как только одна из осей начинает получать ощутимо больший момент и более высокую угловую скорость вращения относительно другой, в вискомуфте появляется трение и она начинает блокироваться. Причем, чем больше разница в скоростях, тем сильнее трение внутри вискомуфты и степень её блокировки. По мере увеличения степени блокировки вискомуфты и выравнивания угловых скоростей чашки и полуоси, трение внутри вискомуфты начинает падать, что ведёт к плавному размыканию вискомуфты и отключению блокировки. Данная схема применяется для межосевых дифференциалов, так как её конструкция слишком массивна для установки на мостовой редуктор. (Схема на картинке) Подобный механизм блокировки хорошо подходит для эксплуатации в условиях плохого дорожного покрытия, однако, в условиях настоящего бездорожья его способности далеко не выдающиеся: вискомуфта не справляется с постоянными сменами состояний сцепления мостов с грунтом, запаздывает при включении, перегревается и выходит из строя. Данный тип блокировки межосевого дифференциала можно встретить на «паркетных» внедорожниках: Toyota Rav4, Lexus RX300 и. т. п.
(Схема на картинке) Подобный механизм блокировки хорошо подходит для эксплуатации в условиях плохого дорожного покрытия, однако, в условиях настоящего бездорожья его способности далеко не выдающиеся: вискомуфта не справляется с постоянными сменами состояний сцепления мостов с грунтом, запаздывает при включении, перегревается и выходит из строя. Данный тип блокировки межосевого дифференциала можно встретить на «паркетных» внедорожниках: Toyota Rav4, Lexus RX300 и. т. п.
Кулачковые и зубчатые автоматические блокировки.
Принцип работы этих блокировок достаточно прост. Вместо классического шестеренчатого планетарного механизма используются кулачковые или зубчатые пары, которые при небольшой разнице в угловых скоростях полуосей имеют возможность взаимно проворачиваться (перескакивать), а при пробуксовке заклиниваются и блокируют полуоси друг с другом. Нетрудно себе представить, что происходит с автомобилем при срабатывании такой блокировки в повороте.
Некоторые экземпляры просто отключают одну из полуосей в момент возникновения небольшой разницы скоростей. Именно поэтому, штатно такими блокировками оборудуются только дифференциалы военной и специальной техники (БТР и. т. п.)
На картинках изображены (слева направо): кулачковая блокировка отечественного производства (БТР 60), Detroit Locker и Detroit E-Z Locker (компания Tractech).
Самоблокирующиеся дифференциалы.
Устройство таких дифференциалов довольно простое и принципиально ни чем не отличается от устройства обычного открытого дифференциала. Между полуосями и чашкой дифференциала добавлены комплекты блоков фрикционных пластин (которые помечены на картинке справа красными точками). Именно поэтому, подобные дифференциалы часто именуют «friction based LSD». Когда дифференциал пытается перераспределить крутящий момент на одну из полуосей и начинает возникать разница в угловых скоростях полуосей и чашки, пластины под действием силы трения сдерживают возникновение этой разницы. Разумеется, когда величина крутящего момента превосходит силу трения пластин, всё вращение передаётся на более легко вращаемую полуось. Такие блокировки работают в сравнительно небольшом диапазоне отношения моментов.
Разумеется, когда величина крутящего момента превосходит силу трения пластин, всё вращение передаётся на более легко вращаемую полуось. Такие блокировки работают в сравнительно небольшом диапазоне отношения моментов.
Довольно часто фрикционные блоки подпружинивают. Такие дифференциалы штатно устанавливаются в задний мост многих внедорожников — Toyota 4Runner (Hilux Surf), Nissan Terrano, Kia Sportage и. т. п. Американская компания ASHA Corp. пошла дальше, снабдив пакет фрикционов LSD дифференциала устройством блокировки, состоящего из насоса с поршнем (Героторный дифференциал). При возникновении разности в угловых скоростях полуоси и чашки насос нагнетает масло (жидкость) на поршень и сдавливает фрикционный блок, тем самым блокируя дифференциал. Данная конструкция получила название Gerodisk (Hydra-Lock) и штатно устанавливается на внедорожники Chrysler (на картинке слева). Практически для всех friction based дифференциалов необходимо применять специальное масло, которое содержит присадки, обеспечивающие нормальную работу фрикционных блоков.
Torque sensitive differentials.
Это одна из самых интересных, эффективных, технологичных и практически применяемых форм блокировки дифференциалов. Принцип работы основан на свойстве гипоидной пары «расклиниваться». В связи с этим, основные (или все) зацепления в таких дифференциалах гипоидные (червячные, или в простонародье — винтовые). Разновидностей конструкций не так уж и много — можно выделить три основных типа.
Первый тип производит компания Zexel Torsen. (T-1) Гипоидными парами являются шестерни ведущих полуосей и сателлиты. При этом каждая полуось имеет собственные сателлиты, которые парно связанны с сателлитами противоположной полуоси обычным прямозубым зацеплением. Следует отметить, что ось сателлита перпендикулярна полуоси. При нормальном движении и равенстве передаваемых на полуоси моментов, гипоидные пары «сателлит / ведущая шестерня» либо остановлены, либо проворачиваются, обеспечивая разницу угловых скоростей полуосей в повороте.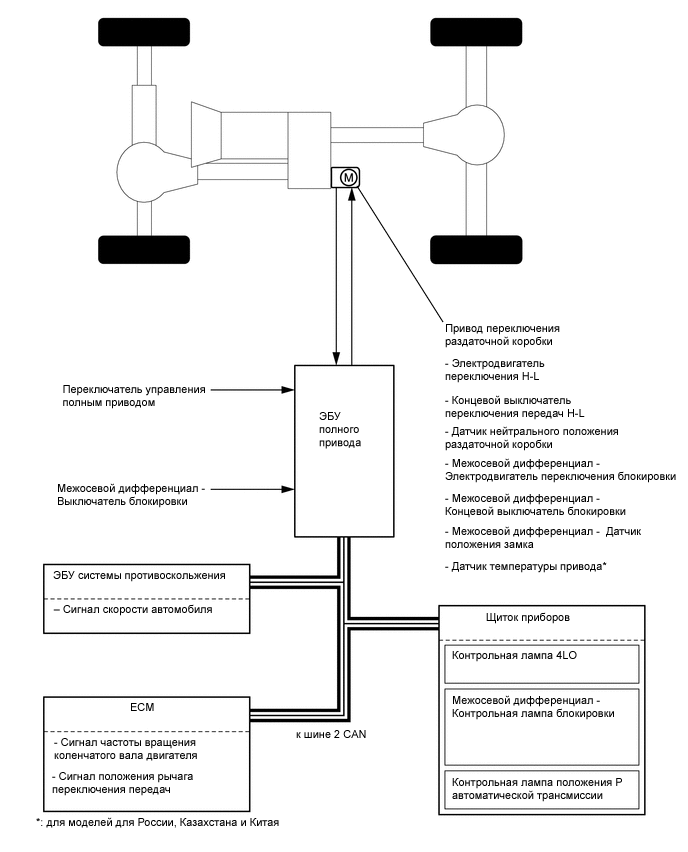
Как только дифференциал пытается отдать момент на одну из полуосей, то гипоидную пару этой полуоси начинает расклинивать и блокировать с чашкой дифференциала, что приводит к частичной блокировке дифференциала. Данная конструкция работает в самом большом диапазоне отношений крутящего момента — от 2.5/1 до 5.0/1, то есть является самой мощной в серии. Диапазон срабатывания регулируется углом наклона зубцов червяка.
Автором второго типа является англичанин Rod Quaife. В данном случае, оси сателлитов параллельны полуосям. Сателлиты расположены в своеобразных карманах чашки дифференциала. При этом парные сателлиты имеют не прямозубое зацепление, а образуют между собой еще одну гипоидную пару, которая расклиниваясь, так же участвует в процессе блокировки (на второй картинке). Подобное устройство имеет и дифференциал True Trac компании Tractech. Даже у нас в России появилось производство аналогичных дифференциалов под отечественные автомобили УАЗ и. т. д.
А вот компания Zexel Torsen в своём дифференциале T-2 предложила немного другую компоновку по сути, того же устройства (на картинке справа). Благодаря своей необычной конструкции, парные сателлиты соединены между собой со внешней стороны солнечных шестерней. По сравнению с первым типом, эти дифференциалы имеют меньший диапазон работы блокировки, однако они более чувствительны к разнице передаваемого момента и срабатывают раньше (начиная от 1.4/1). Компания Tractech недавно выпустила мостовой torque sensitive дифференциал Electrac, снабженный принудительной электроприводной блокировкой.
Благодаря своей необычной конструкции, парные сателлиты соединены между собой со внешней стороны солнечных шестерней. По сравнению с первым типом, эти дифференциалы имеют меньший диапазон работы блокировки, однако они более чувствительны к разнице передаваемого момента и срабатывают раньше (начиная от 1.4/1). Компания Tractech недавно выпустила мостовой torque sensitive дифференциал Electrac, снабженный принудительной электроприводной блокировкой.
Третий тип производится компанией Zexel Torsen (Т-3) и используется в основном для межосевых дифференциалов. Планетарная структура конструкции позволяет сместить номинальное распределение момента в пользу одной из осей. Например, используемый на 4Раннере 4-го поколения дифференциал Т-3 имеет номинальное распределение момента 40/60 в пользу задней оси. Соответственно, смещен и весь диапазон работы частичной блокировки: от (front/rear) 53/47 до 29/71.
В целом, смещение номинального распределения момента между осями возможно в диапазоне от 65/35 до 35/65. Срабатывание частичной блокировки происходит при 20-30% разнице в передаваемых на оси моментах. Так же, подобная структура дифференциала делает его компактным, что в свою очередь, упрощает конструкцию и улучшает компоновку раздаточной коробки.
Срабатывание частичной блокировки происходит при 20-30% разнице в передаваемых на оси моментах. Так же, подобная структура дифференциала делает его компактным, что в свою очередь, упрощает конструкцию и улучшает компоновку раздаточной коробки.
Вышеописанные torque sensitive дифференциалы очень популярны в автоспорте. Более того, многие производители устанавливают такие дифференциалы на свои модели штатно, как в качестве межосевых, так и межколёсных дифференциалов. Например, Тойота устанавливает такие дифференциалы как на легковые автомобили (Supra, Celica, Rav4, Lexus IS300, RX300 и. т. д), так и на внедорожники (4Runner / Hilux Surf, Land-Cruiser, Mega-Cruiser, Lexus GX470) и автобусы (Coaster Mini-Bus). Данные дифференциалы не требуют применения специальных присадок к маслу (в отличии от friction-based дифференциалов), однако лучше использовать качественное масло для нагруженных гипоидных передач.
Управление работой дифференциалов при помощи электронных систем контроля тормозных усилий (Traction Control и т. п.)
п.)
В современном автомобилестроении применяется всё больше и больше электронных систем контроля за движением автомобиля. Уже редко можно встретить автомобили, не оснащенные системой ABS (не дающей колёсам заблокироваться при торможении). Более того, уже с конца 80-х годов прошлого века передовые производители стали комплектовать свои флагманские модели системами контроля тяги и сцепления колёс — Traction Control. Например, Тойота установила систему Traction Control на Lexus LS400 в 1989 (90) году. Принцип работы такой системы прост: универсальные (так же обслуживают ABS) датчики вращения, установленные на контролируемых колёсах, фиксируют начало пробуксовки одного колеса оси относительно другого и система автоматически притормаживает забуксовавшее колесо, тем самым увеличивая на него нагрузку и вынуждая дифференциал отдать момент на колесо с хорошим сцеплением. При сильной пробуксовке, система так же может ограничивать подачу топлива в цилиндры. Работа такой системы очень эффективна, особенно на заднеприводных автомобилях. Как правило, при желании такую систему можно принудительно деактивировать кнопкой на приборной панели. Со временем, электронная система контроля тормозных усилий совершенствовалась и к ней добавлялись всё новые функции, работающие наряду с ABS и TRAC. (например управление разностью разблокировки рулевых колёс для более успешного прохождения поворотов). У всех производителей эти функции назывались по разному, однако смысл при этом оставался одинаковым. И вот, данные системы стали устанавливаться на полноприводные автомобили и внедорожники, причем в некоторых случаях они являются единственным средством контроля тяги и перераспределения крутящего момента между осями и колёсами (Mercedes ML, BMW X5). В случае, если внедорожник оснащен более серьёзными средствами распределения крутящего момента (жесткими блокировками и/или самоблокирующимися дифференциалами), то электронная система контроля тормозных усилий очень удачно дополняет эти средства. Хороший пример тому — великолепная управляемость и проходимость последнего поколения Тойотовских внедорожников 4Runner (Hilux Surf), Prado, Lexus GX470.
Как правило, при желании такую систему можно принудительно деактивировать кнопкой на приборной панели. Со временем, электронная система контроля тормозных усилий совершенствовалась и к ней добавлялись всё новые функции, работающие наряду с ABS и TRAC. (например управление разностью разблокировки рулевых колёс для более успешного прохождения поворотов). У всех производителей эти функции назывались по разному, однако смысл при этом оставался одинаковым. И вот, данные системы стали устанавливаться на полноприводные автомобили и внедорожники, причем в некоторых случаях они являются единственным средством контроля тяги и перераспределения крутящего момента между осями и колёсами (Mercedes ML, BMW X5). В случае, если внедорожник оснащен более серьёзными средствами распределения крутящего момента (жесткими блокировками и/или самоблокирующимися дифференциалами), то электронная система контроля тормозных усилий очень удачно дополняет эти средства. Хороший пример тому — великолепная управляемость и проходимость последнего поколения Тойотовских внедорожников 4Runner (Hilux Surf), Prado, Lexus GX470. Являясь представителями одной платформы, они обладают межосевым дифференциалом Torsen T-3 с возможностью жесткой блокировки, а так же электронной системой контроля тормозных усилий и тяги со множеством функций, помогающих водителю управлять автомобилем.
Являясь представителями одной платформы, они обладают межосевым дифференциалом Torsen T-3 с возможностью жесткой блокировки, а так же электронной системой контроля тормозных усилий и тяги со множеством функций, помогающих водителю управлять автомобилем.
Источник https://www.ohotniki.ru/transport/boats/article/2012/01/26/634428-chto-takoe-differentsial-i-dlya-chego-nuzhnyi-blokirovki.html
Дифференциалы. Обзор наиболее распространенных дифференциалов и механизмов их блокировки.
В повороте все колеса автомобиля движутся по своей траектории. Причем задние крутятся медленнее передних, а внешние к повороту быстрее внутренних. Но как это возможно, если ведущие колеса жестко связаны с валом двигателя? Ответ: с помощью дифференциала.
Текст: Карелов Олег.
Что же такое дифференциал? Это механизм, который разделяет крутящий момент по двум выходным валам, позволяя каждому из них вращаться с различной скоростью. Число дифференциалов в автомобиле зависит от типа привода: на моделях с единственной ведущей осью устанавливается только один – межколесный, разделяющий тягу между левым и правым колесом. Если же машина оснащена, например, постоянным полным приводом, то требуются уже три дифференциала: один межосевой, передающий момент от коробки передач к ведущим осям, и два межколесных.
Если же машина оснащена, например, постоянным полным приводом, то требуются уже три дифференциала: один межосевой, передающий момент от коробки передач к ведущим осям, и два межколесных.
Свободный дифференциал
|
Устройство свободного дифференциала. Крутящий момент от мотора подводится к ведомому зубчатому колесу (1), которое через конические колеса-сателлиты (2) передает усилие на выходные валы (3). Независимость же вращения выходных валов обеспечивается за счет проворота сателлитов вокруг своей оси. |
Внутреннее устройство дифференциалов бывает различным, а наибольшее распространение получил открытый или, по-другому, свободный дифференциал. Это чисто механическое устройство отличается простотой (обычно в нем всего четыре конических шестерни), компактностью и полностью соответствует своему названию: то есть делит крутящий момент в фиксированном соотношении (обычно 50:50) и никак не препятствует вращению выходных валов с разной скоростью. Но здесь-то и скрыта опасность: если одно из колес попадет на скользкую поверхность и забуксует, то без тяги останется и второе колесо, а сам автомобиль не сможет сдвинуться с места. Знакомая картина?
Но здесь-то и скрыта опасность: если одно из колес попадет на скользкую поверхность и забуксует, то без тяги останется и второе колесо, а сам автомобиль не сможет сдвинуться с места. Знакомая картина?
От этого недостатка избавлены блокируемые дифференциалы. В отличие от свободных, они уже с некоторым усилием стараются замедлить опережающий по скорости вал, увеличивая крутящий момент на отстающем. И хотя звучит это несколько сложно, на самом деле принцип работы подобных устройств прост: проворачиванию валов относительно друг друга препятствует возникающая между ними сила трения, и чем она больше, тем в большей степени крутящий момент смещается в сторону отстающего вала.
Куда пропадает момент?Автомобиль разгоняется благодаря силе трения, возникающей между шиной и дорогой. Пока эта сила превышает силу тяги на колесе (равную крутящему моменту, поделенному на радиус колеса), машина движется без пробуксовки. |
 Но как только сцепление с дорогой падает, и сила трения оказывается меньше силы тяги – избыток крутящего момента срывает колесо в скольжение. А что дальше? Скорость вращения колеса быстро увеличивается, соответственно, растут и обороты мотора. Теперь возможны два сценария: либо сработает ограничитель частоты вращения коленвала, то есть уменьшится подача топлива, и крутящий момент мотора упадет, либо, просто снижаясь по мере нарастания оборотов (развиваемый мотором момент непостоянен и достигает максимума примерно на средних оборотах), избыток крутящего момента исчезнет, и колесо станет вращаться с постоянной скоростью. Но в любом случае развиваемый двигателем момент падает, а вместе с ним и сила тяги колесах. Приехали.
Но как только сцепление с дорогой падает, и сила трения оказывается меньше силы тяги – избыток крутящего момента срывает колесо в скольжение. А что дальше? Скорость вращения колеса быстро увеличивается, соответственно, растут и обороты мотора. Теперь возможны два сценария: либо сработает ограничитель частоты вращения коленвала, то есть уменьшится подача топлива, и крутящий момент мотора упадет, либо, просто снижаясь по мере нарастания оборотов (развиваемый мотором момент непостоянен и достигает максимума примерно на средних оборотах), избыток крутящего момента исчезнет, и колесо станет вращаться с постоянной скоростью. Но в любом случае развиваемый двигателем момент падает, а вместе с ним и сила тяги колесах. Приехали.Дифференциал с жесткой блокировкой
Крайний случай – дифференциал с жесткой блокировкой, который по команде водителя может намертво соединить выходные валы друг с другом, полностью исключив проскальзывания отдельных колес на бездорожье. В «свободном» же состоянии, когда блокировка отключена, он ничем не отличается от открытого дифференциала, то есть обеспечивает такую же независимость вращения валов.
В «свободном» же состоянии, когда блокировка отключена, он ничем не отличается от открытого дифференциала, то есть обеспечивает такую же независимость вращения валов.
Подобные модели довольно широко распространены: возможность передать на один вал все 100% крутящего момента двигателя весьма востребована в среде внедорожников, где дифференциалы с жесткой блокировкой встречаются как в качестве межколесных, так и межосевых.
В то же время, далеко выйти за обозначенные границы этим дифференциалам не суждено, ведь на асфальте блокировку нужно каждый раз отключать, иначе трансмиссия будет испытывать чрезмерные нагрузки в поворотах. А значит, автомобиль остается безоружен против проскальзывания колес на неожиданно возникших скользких участках дороги.
Дифференциал с дисковой блокировкой
|
За исключением фрикционов и поджимающей пружины дифференциал с дисковой блокировкой почти не отличается от свободного. |

Разумеется, это не годится для мощных легковых машин, способных провернуть колеса даже на асфальте — для них существуют различные самоблокирующиеся дифференциалы.
Например, механизмы с дисковой блокировкой, часто применяемые в автоспорте и на форсированных версиях дорожных машин. Устроены они почти так же, как и свободные дифференциалы, но валы в них связаны друг с другом посредством подпружиненных фрикционов. То есть в случае пробуксовки дисковая блокировка может добавить на отстающий вал лишь столько ньютоно-метров, сколько фрикционы способны выдержать до начала проскальзывания. Как правило, это совсем немного – всего несколько десятков Нм, что позволит компенсировать лишь незначительное падение крутящего момента, например, при попадании колеса на пыльный или мокрый асфальт.
А что мешает увеличить силу трения фрикционов? Проблема в том, что, будучи постоянно поджатыми, эти фрикционы препятствуют свободному вращению колес в повороте, что ведет к ускоренному износу шин, самого дифференциала и неоднозначно сказывается на управляемости.
Дифференциалы с блокировкой вискомуфтой
|
Эффект блокировки вискомуфты достигается в результате того, что силиконовая жидкость «склеивает» между собой ведущие и ведомые диски муфты, которые до этого скользили друг по другу и трением обеспечивали нагрев жидкости. |
Этих недостатков лишены дифференциалы, блокируемые вискомуфтой. В данном случае перераспределение крутящего момента возникает не в результате трения фрикционов, а за счет свойств особой жидкости на силиконовой основе, которая “умеет” затвердевать при нагреве. В неё помещается два набора пластин, каждый из которых связан со своим выходным валом дифференциала. И пока автомобиль движется без пробуксовок, а, соответственно, и разница в скорости вращения валов невелика, муфта себя никоим образом не проявляет, но, как только один вал начинает существенно обгонять другой, пластины взбивают жидкость, её давление и температура возрастают, вязкость повышается — и вискомуфта тормозит вал. При этом сопротивление может быть столь велико, что блокировка становится практически жесткой – на каждый вал может передаваться 100% крутящего момента!
При этом сопротивление может быть столь велико, что блокировка становится практически жесткой – на каждый вал может передаваться 100% крутящего момента!
Почему же тогда вискомуфту не часто встретишь на внедорожниках? Тому есть две причины: первая – это склонность к перегреву во время длительной пробуксовки, вторая – задержка срабатывания, ведь на нагрев жидкости нужно время. Последнее настораживает и производителей мощных легковых автомобилей: медлительность не идет на пользу управляемости. Но есть и те, кому все же удается достичь отличных ездовых характеристик: это и Subaru Impreza, и Nissan 370Z, и полноприводный Lexus IS.
Дифференциалы с винтовой блокировкой
|
Степень блокировки дифференциала Torsen определяется углом нарезки зубцов на червячной передаче. Однако чем жестче блокировка, тем резче она срабатывает, а потому на практике Torsen обеспечивает только четырехкратную разницу в крутящем моменте между валами. |

Куда более совершенными являются дифференциалы с винтовой блокировкой, в частности Torsen и Quaife. В отличие от всех предыдущих, созданных по принципу “открытый дифференциал с коническими шестернями + блокировка”, эти модели устроены совсем иначе. Особенность в хитрых червячных передачах: когда на одном из валов падает крутящий момент, шестерни начинает расклинивать и момент тут же перебрасывается на другую ось. То есть дифференциал даже не дожидается начала проскальзывания колеса – он реагирует на ухудшение сцепления с дорогой! При этом чем сильнее водитель жмет на газ, тем “жестче” связь между валами: в пределе на одну ось может приходится до 80% крутящего момента. Получается, что дифференциал “зажимается” тогда, когда надо – в момент разгона, а под сброс газа никак не мешает независимому вращению валов.
Столь логичное поведение и молниеносное быстродействие пригодились в совершенно различных областях: эти дифференциалы можно встретить и на скоростных автомобилях Audi с полным приводом Quattro, и на признанном внедорожнике Toyota Land Cruiser.
Недостаток же у подобных устройств один – беспомощность против диагонально вывешивания, ведь расклинивание шестерен возможно только при наличии хоть какой-то силы сопротивления на проскальзывающем колесе. В тех же условиях дифференциал с дисковой блокировкой будет хоть как-то будет пытаться помочь, а вискомуфта, “схватившись” после нескольких проворотов колеса, и вовсе передаст большую часть момента на противоположный вал.
Дифференциалы с блокировкой многодисковым сцеплением
Получается, что все дифференциалы – это некий компромисс между проходимостью и управляемостью? Да, но так продолжалось лишь до тех пор, пока электроника, наконец, не добралась и этого узла автомобиля. Произошло это в середине 80-ых годов, когда Mercedes и Porsche почти одновременно оснастили свои модели дифференциалами с электронноуправляемыми многодисковыми сцеплениями. Конструктивно они напоминали механизмы с дисковой блокировкой, но фрикционы в них поджимались уже не пружиной, а гидроприводом, который по команде блока управления мог ослаблять или наоборот усиливать натяг./133.gif)
В результате характеристики дифференциала стали определяться строчками программного кода, а конструкторы получили огромные возможности для настройки. Например, для лучшей маневренности можно ослаблять связь между валами на входе в поворот, а, затем, на выходе, наоборот зажимать сцепление для максимально эффективного разгона. Можно и полностью заблокировать дифференциал, и тогда автомобилю не страшно никакое диагональное вывешивание.
|
Дифференциал AYC (active yaw control) от Mitsubishi Lancer Evo в разрезе. Можно видеть планетарный ряд и фрикционы, зажимая которые электроника включает нужную передачу. |
|
|
Левый поворот. Электроника зажимает правое сцепление, включая повышающую передачу, и на правую полуось поступает дополнительный крутящий момент. |
Правой поворот. |
 Зажимается левое сцепление, и через понижающую передачу момент передается на левую полуось.
Зажимается левое сцепление, и через понижающую передачу момент передается на левую полуось.Казалось бы, у такого дифференциала нет слабых мест. Но, как и все остальные, он перераспределяет крутящий момент, выравнивая частоту вращения валов. А что если бы дифференциал наоборот заставлял бы один вал вращаться быстрее другого? Ведь тогда он мог бы добавить момент на внешнее к повороту колесо и тем самым помочь “заправить” автомобиль на дугу…
Активные дифференциалы
Так появилась идея активного дифференциала – самого совершенного на данный момент. Пионером в этой области является Mitsubishi, оснастившая им свой Lancer Evolution. Взяв за основу обычный открытый дифференциал, японцы дополнительно соединили выходные валы через две передачи — повышающую и понижающую, включением которых управляет электроника при помощи мокрых сцеплений. Таким образом, задействуя ту или иную передачу, компьютер может заставить один вал крутиться быстрее или медленнее другого! Усилие же, а точнее величина перебрасываемого крутящего момента, регулируется изменением степени проскальзывания сцепления.
Активный дифференциал устанавливается на заднюю ось автомобиля, наделяя его невиданной устойчивостью в поворотах: там, где любой другой в ответ на прибавление газа уже давно бы “повис” в заносе, автомобиль с таким дифференциалом лишь активнее ввинчивается в вираж. Не страшно и бездорожье – если забуксовало одно колесо, то второе будет стремиться вращаться еще быстрее.
Означает ли это, что в будущем каждый автомобиль станет оснащаться подобным дифференциалом? Скорее всего, нет, и дело не столько в цене этого высокотехнологичного устройства, сколько в целесообразности. Простой и надежный открытый дифференциал никак не ограничивает скоростные возможности большинства легковых автомобилей, а для внедорожников более чем достаточно и механизмов с дополнительной блокировкой многодисковым сцеплением. Остается сегмент мощных, спортивных машин, где до сих пор правили бал агрегаты Torsen и дифференциалы с дисковой блокировкой. Вот здесь-то и могут пригодиться выдающиеся характеристики активных дифференциалов.
08.06.2009
Детали:
|
|||
|
|||
 И, на первый взгляд, она ничем не хуже механической: на проскальзывающем валу возрастает сопротивление, поднимается крутящий момент, а, соответственно, возрастает и сила тяги на противоположном колесе. Однако в действительности никакого перераспределения крутящего момента здесь не происходит! Ведь проскальзывающая ось уже не «подталкивает» отстающую, а просто нагружает рычаги подвески. В результате на противоположном колесе сила тяги будет в точности равна тормозному усилию, в то время как с жесткой блокировкой она могла бы быть в два раза выше (если изначально дифференциал делит момент в соотношении 50:50)!
И, на первый взгляд, она ничем не хуже механической: на проскальзывающем валу возрастает сопротивление, поднимается крутящий момент, а, соответственно, возрастает и сила тяги на противоположном колесе. Однако в действительности никакого перераспределения крутящего момента здесь не происходит! Ведь проскальзывающая ось уже не «подталкивает» отстающую, а просто нагружает рычаги подвески. В результате на противоположном колесе сила тяги будет в точности равна тормозному усилию, в то время как с жесткой блокировкой она могла бы быть в два раза выше (если изначально дифференциал делит момент в соотношении 50:50)!
|
|||
 Немного, но, например, для движения по песку в самый раз.
Немного, но, например, для движения по песку в самый раз.
|
|||
|
|||
 Конечно, автомобиль будет увереннее разгоняться на сколькой дороге, но при этом удержать его на прямой станет гораздо сложнее. Ведь в отсутствие блокировок проскальзывание одного ведущего колеса автоматически уменьшает силу тяги и на остальных, а автомобиль просто теряет ускорение, продолжая прямолинейное движение. Если же блокировки есть, то сила тяги на других колесах сохраняется, а значит, появляется момент, который стремится развернуть автомобиль.
Конечно, автомобиль будет увереннее разгоняться на сколькой дороге, но при этом удержать его на прямой станет гораздо сложнее. Ведь в отсутствие блокировок проскальзывание одного ведущего колеса автоматически уменьшает силу тяги и на остальных, а автомобиль просто теряет ускорение, продолжая прямолинейное движение. Если же блокировки есть, то сила тяги на других колесах сохраняется, а значит, появляется момент, который стремится развернуть автомобиль.
|
||
 Её особенность — отдельные фрикционы, «подключающие» задние полуоси, и необычный планетарный редуктор задней оси, способный переходить на повышенную передачу. Таким образом, в повороте электроника может поджать фрикцион внешнего заднего колеса, ослабить натяг внутреннего, включить повышенную передачу и тем самым подруливать тягой, помогая заправлять автомобиль в вираж.
Её особенность — отдельные фрикционы, «подключающие» задние полуоси, и необычный планетарный редуктор задней оси, способный переходить на повышенную передачу. Таким образом, в повороте электроника может поджать фрикцион внешнего заднего колеса, ослабить натяг внутреннего, включить повышенную передачу и тем самым подруливать тягой, помогая заправлять автомобиль в вираж.Источник http://magazine.autotechnic.su/technology/diff/differentials.html
Виды дифференциалов
Блокировки дифференциалов используют для повышения вездеходности более восьмидесяти лет и несмотря на все достижения прогресса, настоящий внедорожник без них до сих пор не обходится.
В материале используется техническая лексика, способная привести к нарушению работы мозга неподготовленного читателя.
Ещё в начале 1930-х не кто иной как Фердинанд Порше, вёл исследования по части блокировок, а чуть позже организованная им компания ZF (Zahnradfabrik – завод зубчатых колёс) комплектовала Volkswagen Type B70 первым в мире кулачковым дифференциалом. Сегодня в арсенале производителей масса различных конструкций, которые они штатно или опционно устанавливают на свои автомобили 4х4.
Сегодня в арсенале производителей масса различных конструкций, которые они штатно или опционно устанавливают на свои автомобили 4х4.
Нужно сразу разделить два принципиально разных подхода к блокировке дифференциала. Первый – применение самоблоков, которые способны без привода или управления извне переносить крутящий момент с буксующего колеса на то, у которого лучше сцепление с дорогой, то есть «замыкаться». На самом деле полной, стопроцентной блокировки в их промышленных видах нет, и потому корректно называть их дифференциалами повышенного трения. Именно такой и изобрел Порше в 1932 году. Однако существуют и конструкции, умеющие самостоятельно замыкаться полностью. Производят их небольшие компании. Таков, например, шариковый дифференциал Красикова – устройство, безусловно, полезное на внедорожной трассе, но мы в этот раз поговорим только о разработках с известным ресурсом, которые производители ставят на автомобили серийно.
Дифференциал Красикова. Замкнутые цепочки шариков играют здесь роль обычных шестерён. Просто и эффективно
Просто и эффективноВторой подход предполагает блокировку дифференциалов извне. При помощи механики, электрики или пневматики дифференциалы жёстко соединяют две свои половинки для вращения вместе. Управлять процессом может как водитель, так и автоматика.
Ещё одно принципиальное различие – если межколёсные дифференциалы обычно работают симметрично, то среди межосевых есть как симметричные, так и несимметричные, раздающие момент вперёд и назад не поровну. Цели и области применения у них разные. Симметричные, как правило, атрибут внедорожника, которому важно просто выдать максимум момента к тому или иному колесу. Несимметричные – удел спортивных кроссоверов: им дисбаланс при сохранении привода на все колёса придаёт заднеприводный характер в вираже и тем самым повышает управляемость.
Среди разнообразных более-менее сложных конструкций существуют поистине уникальные системы, как, например, управляющие «разнотягом» задних колёс устройства AYC Mitsubishi и SH-AWD Honda, DPC BMW.
С ПОВЫШЕННЫМ ТРЕНИЕМ
На сегодняшний день наиболее распространён винтовой или червячный дифференциал, в котором распределением момента между половинками заведуют пары косозубых шестерён. Степень их блокировки зависит от трения в косозубом зацеплении и от трения торцов шестерен о корпус дифференциала. Варьировать характеристики можно изменяя угол зубьев, но в любом случае степень блокировки, обеспечиваемая такими конструкциями по вездеходным меркам эфемерна. К таким системам относятся Torsen и Quaife. Благодаря мягкому, неполному срабатыванию и возможности создать несимметрично работающую конструкцию, эти дифференциалы как правило применяют в качестве межосевых. Кстати, главный плюс Torsen – его высочайшая надёжность.
Блокировка Torsen/Quaife. Винтовые шестерни такой блокировки при зацеплении работают с большим трениемДругой вариант дифференциалов повышенного трения – многодисковые конструкции, в которых пакет «мокрого» сцепления, соединяющий две полуоси, близок по конструкции к аналогичному в обычном автомате. Характеристика срабатывания и степень блокировки здесь определяется тем, каким образом сжимались эти диски. Самый простой дифференциал повышенного трения устанавливали на старый Grand Cherokee – там пакет дисков был просто подпружинен с постоянным усилием. То есть дифференциал был всё время немного поджат, а в случае пробуксовки одного колеса он передавал какую-то часть момента на другое. Плюс – простота конструкции, минус – линейность характеристики сжатия определяла узкий диапазон действительной работы дифференциала. Проще говоря, на серьёзном бездорожье муфта просто буксовала и полноприводность получалась условная.
Характеристика срабатывания и степень блокировки здесь определяется тем, каким образом сжимались эти диски. Самый простой дифференциал повышенного трения устанавливали на старый Grand Cherokee – там пакет дисков был просто подпружинен с постоянным усилием. То есть дифференциал был всё время немного поджат, а в случае пробуксовки одного колеса он передавал какую-то часть момента на другое. Плюс – простота конструкции, минус – линейность характеристики сжатия определяла узкий диапазон действительной работы дифференциала. Проще говоря, на серьёзном бездорожье муфта просто буксовала и полноприводность получалась условная.
В более продвинутых системах в качестве рабочей жидкости для пакета фрикционов использовались силиконовые смазки, повышающие трение при нагреве. Но и они скорее для полноприводных спортсменов, чем для полноценных внедорожников, хотя именно такие конструкции были установлены в заднем мосту Mitsubishi Pajero и Nissan Patrol. Дифференциал с виско-муфтой довольно часто применяли в качестве межосевого — например, на Subaru Impresa, Legasy, Forester с механической коробкой, а впервые его серийно установили на AMC Eagle. Ещё одна ветвь порождённая виско-муфтами – конструкции, в которых она вообще полностью заменила межосевой дифференциал. Такова знаменитая трансмиссия Syncro полноприводных Volkswagen последней трети ХХ века.
Дифференциал с виско-муфтой довольно часто применяли в качестве межосевого — например, на Subaru Impresa, Legasy, Forester с механической коробкой, а впервые его серийно установили на AMC Eagle. Ещё одна ветвь порождённая виско-муфтами – конструкции, в которых она вообще полностью заменила межосевой дифференциал. Такова знаменитая трансмиссия Syncro полноприводных Volkswagen последней трети ХХ века.
Гарантированно блокирующимся стал многодисковый дифференциал с гидророторным насосом. Тут уже дело не ограничилось свойствами масла или натягом пружины. Насос был прикреплён к одной стороне дифференциала, а приводился от другой. Работать он начинал, когда создавалась разница вращения правого и левого колёс, а выработанное давление, в зависимости от степени пробуксовки, больше или меньше сжимало диски. Конструкция хоть и не стопроцентно надёжная, зато гораздо более вездеходная, чем все предыдущие варианты. Из минусов – довольно резкое срабатывание и, увы, не слишком большой ресурс. Тем не менее на Grand Cherokee WJ 1999 года именно такой дифференциал установлен в качестве межосевого.
Армейская крайность самоблоков – кулачковые или сухариковые дифференциалы повышенного трения. Этот вид можно считать самым древним, а представляют они собой абсолютно механическую систему, в которой замыкание половин дифференциала происходит посредством трения поперечных сухарей по выступам боковых муфт – кулачкам. Это довольно грубая, но надёжная конструкция, хорошо работающая в приводах медленных тяжёлых машин с большими колёсами. Она имеет два недостатка – высокую сложность изготовления и огромные потери мощности внутри самого устройства. Такие дифференциалы массово устанавливали на большую часть советской армейской техники, от ГАЗ-66 и «Уралов» до БТР.
Кулачковая блокировка. Главный рабочий элемент – обойма с сухарями. Двигаясь с усилием вперёд-назад, сухари огибают впадины и выпуклости (кулачки)УПРАВЛЯЕМЫЕ ИЗВНЕ
Вторая группа блокируемых дифференциалов – те что механически (электрически, пневматически) намертво соединяют левую половину моста с правой. С ними всё более-менее просто и понятно: к мосту присоединён какой-либо привод, внутри – скользящая муфта наподобие тех, что включают передачи в коробке, – и тяга жёстко распределена между колёсами в соотношении 50 на 50. Причём если раньше для блокирования требовалась полная остановка, то сегодня подавляющее большинство конструкций отлично блокируются и на ходу, при скоростях до 40–50 км/ч.
С ними всё более-менее просто и понятно: к мосту присоединён какой-либо привод, внутри – скользящая муфта наподобие тех, что включают передачи в коробке, – и тяга жёстко распределена между колёсами в соотношении 50 на 50. Причём если раньше для блокирования требовалась полная остановка, то сегодня подавляющее большинство конструкций отлично блокируются и на ходу, при скоростях до 40–50 км/ч.
Именно они лучше всего подходят для бездорожья, наиболее надёжны и безальтернативны для машин, владельцы которых готовы покорять направления, но… О том, что заблокированный дифференциал может быть не только полезен, но и вреден, хорошо знают обладатели внедорожников с механической блокировкой. В грязи такая машина, разумеется, значительно лучше гребёт колёсами, но теряет в управляемости. А на твёрдом покрытии движение в заблокированном режиме вообще чревато поломками и всё той же неважной управляемостью – машина стремится выпрямить траекторию, неохотно заходит в поворот. Следовательно, нужно непрерывно включать-выключать блокировки, а ещё лучше – дозировать тягу на каждое колесо в зависимости от его сцепления с дорогой. Поэтому теперь мы поговорим не о жёстко блокируемых системах, а о дальнейшем развитии самоблокирующихся устройств из предыдущей главы.
Поэтому теперь мы поговорим не о жёстко блокируемых системах, а о дальнейшем развитии самоблокирующихся устройств из предыдущей главы.
Большую часть проблем, связанных с задержками срабатывания, степенью блокировки и главное безошибочностью моментов включения-отключения, удалось решить тогда, когда для рядового автомобиля стали доступными электронные системы борьбы с буксованием. Алгоритм их работы прост: датчик вращения колеса (тот же самый, что обслуживает ABS) служит информатором о наличии-отсутствии пробуксовок, а исполнительные механизмы так или иначе оперируют тягой.
Наиболее пригодными для воздействия электроники, разумеется, получились многодисковые муфты, породив обширное семейство электронно-управляемых систем. Причем скорость их реагирования позволяет столь тонко дозировать тягу на половинках дифференциала, что автомобиль способен мгновенно приспосабливаться к меняющимся условиям движения. Для межосевого дифференциала это дает возможность перебрасывать часть момента с оси на ось для уверенного трогания или придания автомобилю большей заднеприводности в повороте. Межколесные получили ещё больше полномочий – теперь они могут даже корректировать курс на ходу.
Межколесные получили ещё больше полномочий – теперь они могут даже корректировать курс на ходу.
Подобные системы установлены в трансмиссиях заряженных версий М BMW X5 и X6. Помимо регулируемого несимметричного межосевого (40 на 60% в спокойном режиме), в заднем мосту здесь установлен активный дифференциал DPC с двумя пакетами фрикционов и двумя планетарными механизмами. В повороте фрикционы внешнего колеса сжимаются, увеличивая тягу на нём. Вкупе с перераспределением момента в пользу задних колёс это даёт сильный эффект доворота машины без поворота руля. Разумеется, комфортность и универсальность такой системы полностью зависит от тонкостей прописанных программ, но и открывает перед владельцем даже некоторую возможность индивидуальной настройки персонального автомобиля в сторону зажигательности или, наоборот, безопасности.
Наряду с подобными устройствами те же функции могут быть с успехом реализованы штатной противобуксовочной системой, тормозящей свободное колесо и через стандартный свободный дифференциал отсылающей момент к противоположному. По сути, это типовая работа системы стабилизации ESP, перепрограммированная для условий плохой дороги и низких скоростей. И здесь главное – быстродействие, а также точность программы. Подобные «псевдоблоки» способны даже кроссоверам придать достаточно высокую проходимость. К примеру, работу системы контроля тяги ETC стандартного М-класса на бездорожье можно отличить от честно заблокированного аналога со внедорожным пакетом лишь по треску насоса ABS. Разумеется, для длительных силовых упражнений такой вариант не слишком хорош – немного теряется тяга, насос ABS перегревается, да и колодки изнашиваются, но эпизодическое бездорожье подобная электроника побеждает триумфально. Поскольку эффективность подобных систем с годами растёт, а стоимость падает, они всё больше вытесняют с рынка иные, механически более сложные устройства. Последним приходится довольствоваться нишей автоспорта или полноценных внедорожников.
По сути, это типовая работа системы стабилизации ESP, перепрограммированная для условий плохой дороги и низких скоростей. И здесь главное – быстродействие, а также точность программы. Подобные «псевдоблоки» способны даже кроссоверам придать достаточно высокую проходимость. К примеру, работу системы контроля тяги ETC стандартного М-класса на бездорожье можно отличить от честно заблокированного аналога со внедорожным пакетом лишь по треску насоса ABS. Разумеется, для длительных силовых упражнений такой вариант не слишком хорош – немного теряется тяга, насос ABS перегревается, да и колодки изнашиваются, но эпизодическое бездорожье подобная электроника побеждает триумфально. Поскольку эффективность подобных систем с годами растёт, а стоимость падает, они всё больше вытесняют с рынка иные, механически более сложные устройства. Последним приходится довольствоваться нишей автоспорта или полноценных внедорожников.
Сегодня процессы самоблокировки в большинстве дифференциалов столь скоротечны и плавны, что зачастую даже продвинутый водитель не в состоянии отличить, сработал у него самоблок, принудительная блокировка или это электроника стабилизации помогла не буксовать. Будущее систем перераспределения тяги в поголовном господстве противобуксовочных систем для массового автомобиля и полноценных «железных» блокировок для настоящего, бескомпромиссного офф-роуда.
Будущее систем перераспределения тяги в поголовном господстве противобуксовочных систем для массового автомобиля и полноценных «железных» блокировок для настоящего, бескомпромиссного офф-роуда.
Текст Евгений Хапов
БЛОКИРОВКА ДИФФЕРЕНЦИАЛА ▷ Русский перевод
ДИФФЕРЕНЦИАЛЬНЫЙ ЗАМОК НА РУССКОМ ЯЗЫКЕ
Результатов: 47,
Время: 0. 0621
0621
Примеры использования блокировка дифференциала в предложение и их переводы
Toyota Land Cruiser: Система полного привода — Использование других систем вождения
Используйте переключатель управления полным приводом и блокировку межосевого дифференциала /
переключатель разблокировки для выбора следующей передачи и межосевого дифференциала
режимы.
- Переключатель управления полным приводом
- h5 (высокоскоростное положение)
Нормальная езда на всех типах дороги.
- L4 (низкоскоростное положение)
Вождение, требующее максимум мощность и тяга, такие как подъем или спуск по крутому склону холмы, вождение по бездорожью и вытаскивание песка или грязи и т. д.
- Выключатель блокировки / разблокировки межосевого дифференциала
Блокировка межосевого дифференциала когда ваши автомобили колеса застрять в канаве или когда езда по скользкой или ухабистой дороге поверхность.
Разблокируйте межосевой дифференциал после того, как колеса были освобождены, или после переезда в квартиру, нескользкая поверхность.
Переключение между h5 и L4
ШАГ 1
Полностью остановите автомобиль.
STEP 2
Переведите рычаг переключения передач в положение N.
STEP 3
Нажмите и поверните переключатель управления полным приводом по часовой стрелке до упора.
Сохраняйте это состояние до тех пор, пока не загорится индикатор низкой скорости полного привода. свет включается.
ШАГ 1
Полностью остановите автомобиль.
STEP 2
Переведите рычаг переключения передач в положение N.
STEP 3
Поверните переключатель управления полным приводом против часовой стрелки до упора.
Сохраняйте это состояние до тех пор, пока не загорится индикатор низкой скорости полного привода. свет гаснет.
- Переключатель управления полным приводом может работать, когда
- Выключатель ПУСК-СТОП ДВИГАТЕЛЯ находится в режиме ЗАЖИГАНИЯ.
- Рычаг переключения передач находится в положении N.
- Автомобиль полностью остановлен.


- Контрольная лампа тихоходного полного привода
Индикатор мигает при переключении между h5 и L4.
- Советы по вождению по скользкой дороге
- Если перевести переключатель управления полным приводом в положение L4 и переключить рычаг к 2 диапазон S при движении по крутому бездорожью, мощность то тормозом можно эффективно управлять с помощью Active TRAC, который помогает водитель для управления приводной мощностью 4 колес.
- Используйте 1 диапазон S рычага переключения передач для максимальной мощности и тяга когда ваши колеса застревают или при движении по крутому склону.
- Контрольная лампа блокировки межосевого дифференциала
Контрольная лампа мигает при блокировке / разблокировке межосевого дифференциала.
- Переключатель блокировки / разблокировки межосевого дифференциала может работать, когда
- Выключатель ПУСК-СТОП ДВИГАТЕЛЯ находится в режиме ЗАЖИГАНИЯ.
- Скорость автомобиля менее 60 миль / ч (100 км / ч).

- Блокировка / разблокировка межосевого дифференциала
- Когда переключатель управления полным приводом находится в L4 с центром дифференциал заблокирован, VSC автоматически отключается. (Блокировка межосевого дифференциала загорятся индикаторы VSC OFF.)
- Если операция не завершена, блокировка межосевого дифференциала индикатор мигает.Если индикаторная лампа не гаснет при разблокировке центра дифференциал, двигайтесь прямо при ускорении или замедлении, или ехать задним ходом.
- Если блокировка / разблокировка межосевого дифференциала не завершена в течение 5 секунд при включенной системе круиз-контроля отключите систему круиз-контроля.
- Если горит индикатор полного привода на низкой скорости или центральный дифференциал индикатор блокировки мигает
- Если индикатор низкой скорости полного привода продолжает мигать
когда
с помощью переключателя управления полным приводом полностью остановите автомобиль,
переведите рычаг переключения передач в положение N и снова нажмите переключатель.
- Если рычаг переключения передач перемещен до низкоскоростного полного привода
индикатор
включается / выключается, режим передачи можно переключить не полностью. Перевод
режим отключает передний и задний карданные валы от трансмиссии
и позволяет автомобилю двигаться независимо от положения переключателя. (В
на этот раз индикатор мигает и звучит зуммер.)
Таким образом, автомобиль может свободно катиться, даже если автоматическая коробка передач включена.
в
П.Вы или кто-то другой можете получить серьезные травмы. Вы должны заполнить
переключение режима передачи.
Чтобы завершить переключение, полностью остановите автомобиль, верните смену рычаг на N и убедитесь, что смена завершена (индикатор загорится вкл выкл).
- Если температура охлаждающей жидкости двигателя слишком низкая, полный привод контроль система может не переключаться. Когда двигатель прогреется, нажмите кнопку снова переключиться.

Если горит индикатор низкой скорости полного привода или межосевой дифференциал
замок
индикатор продолжает мигать даже после попытки вышеуказанного, может
быть неисправностью в двигателе, тормозной системе или системе полного привода.
В этом случае вы не сможете переключаться между h5 и L4, и блокировка межосевого дифференциала может не работать. Осмотрите автомобиль немедленно обратитесь к дилеру Toyota.
ВНИМАНИЕ Никогда не перемещайте переключатель управления полным приводом, если колеса потеряли сцепление с дорогой. Это может привести к несчастному случаю, повлекшему за собой смерть или серьезную травму. Если рычаг переключения передач перемещен до низкой скорости
индикатор полного привода
включается / выключается, режим передачи можно переключить не полностью.В
перечислить
режим отключает передний и задний карданные валы от трансмиссии
и позволяет автомобилю двигаться независимо от положения переключателя. (В
в этот раз,
индикатор мигает и раздается зуммер.)
Таким образом, автомобиль может свободно катиться, даже если автомат
передача находится в
P. Вы или кто-то другой можете получить серьезные травмы. Вы должны заполнить
то
переключение режима передачи. |

УВЕДОМЛЕНИЕ
|
Подробнее об использовании других систем вождения:
Система полного привода
Самоблокирующийся дифференциал на автомобиле Formula Student
Иван Симионато 1013650 — иван[email protected] — Диплом «Машиностроение» Джузеппе Соттана 1012757 — [email protected] — Диплом в области машиностроенияВВЕДЕНИЕ
Рис. 1: MG06 / 11 на мероприятии FSG 2011, Хоккенхаймринг, Германия
1: MG06 / 11 на мероприятии FSG 2011, Хоккенхаймринг, Германия
Целью этого проекта является моделирование преимуществ и недостатков использования самоблокирующегося дифференциала в системе трансмиссии студенческого автомобиля Формулы Падуи сезона 2011 года, MG06 / 11.
Formula Student — это студенческое инженерное соревнование, в котором студенческие команды со всего мира проектируют, строят, тестируют и участвуют в гонках на гоночных автомобилях небольшого размера, построенных в стиле формулы. Автомобили оцениваются отраслевыми специалистами по ряду критериев в различных типологиях событий:
- Статические события: дизайн (150 баллов), анализ затрат (100 баллов), оценка презентации проекта бизнес-плана (75 баллов), техническая проверка и проверка безопасности, проверка наклона, проверка тормозов и проверка шума;
- динамических соревнований, к которым относятся: занос (50 баллов), спринт на 1 км (150 баллов), ускорение на 75 м (75 баллов) и выносливость на 22 км (300 баллов) с относительной оценкой экономии топлива (100 баллов).

Цепи для динамических мероприятий узкие, извилистые и не такие быстрые, чтобы обеспечить безопасность учащихся. В таких ситуациях трансмиссия предназначена для оптимизации тяги автомобиля, чтобы как можно быстрее выходить из поворотов, а также для повышения управляемости и управляемости автомобиля, чтобы помочь водителю во время гонки. По этой причине логично использовать самоблокирующийся дифференциал, который быстро реагирует на команды водителя и передает максимальный крутящий момент от двигателя на асфальт.
ЗАДАЧИ
В этом анализе в трансмиссии использовался самоблокирующийся дифференциал с многодисковыми муфтами производства Drexler® Motorsport GmbH, который можно увидеть на рисунке ниже:
Рис.2: Дифференциал повышенного трения Drexler® Formula Student V2 2010
В этом анализе мы хотели сравнить характеристики, которые можно получить от самовидящегося дифференциала, с характеристиками, которые можно получить от обычного дифференциала.
Два разных решения использовались в одном автомобиле с идентичной кинематографической конфигурацией подвески. Чтобы сравнить два разных решения, мы предоставили две разные трассы с двумя другими асфальтовыми покрытиями, чтобы создать разные условия сцепления.
Две дорожки:
- кривая с постоянным радиусом 10 м, чтобы подчеркнуть максимальное поперечное ускорение в условиях максимального крутящего момента, создаваемого двигателем;
- a прямо для оценки максимального продольного ускорения и моделирования реального динамического события в формуле SAE, называемого «ускорением».
Два разных состояния асфальта:
- сухой, чтобы обеспечить максимальное сцепление между гусеницей и шинами, чтобы передать на землю весь крутящий момент, создаваемый двигателем;
- промерзание или замерзание, чтобы обеспечить минимальное сцепление между гусеницей и шиной и подчеркнуть максимальное отношение крутящего момента между двумя полуосями.

Необходимость Блокировка Дифференциал
Конструкция обычных шестерен дифференциала имеет два важных преимущества:
- скорости вращения ведущих колес могут быть отрегулированы независимо друг от друга в соответствии с разными расстояниями, пройденными левым и правым колесами и
- крутящий момент распределяется симметрично на оба ведущих колеса без какого-либо момента рыскания.
Однако эти два преимущества компенсируются серьезным недостатком. Когда потенциал трения двух ведущих колес различен, движущие силы, передаваемые на поверхность дороги для обоих ведущих колес, зависят от меньшего потенциала трения двух ведущих колес. В данном случае это сравнение относится к внутренней компенсации колеса в ведущей оси. Это означает, например, что колесо стоя
- на льду (или мокром / маслянистом асфальте) будет вращаться, а другое колесо, стоящее на асфальте, не сможет передать больший крутящий момент, чем то, которое вращается.Поэтому автомобиль не может трогаться с места.
Чтобы преодолеть этот недостаток обычных дифференциальных передач, в критических условиях движения необходимо запретить компенсирующее действие. Это может быть выполнено:
- с использованием самоблокирующихся дифференциалов , также известных как дифференциалы повышенного трения или блокировки. Это дифференциалы с преднамеренно жестким и ограниченным компенсирующим действием. Это позволяет им передавать крутящий момент на одно колесо, даже когда другое колесо вращается из-за плохого сцепления с дорогой.Это означает потерю преимущества передачи мощности без рыскания. Свободная адаптация обеих скоростей колес к разным расстояниям, пройденным двумя гусеницами, ограничена. Полуоси подвергаются большему напряжению из-за перераспределения крутящего момента. Блокирующие дифференциалы делятся на регулируемые по нагрузке или крутящему моменту и регулируемые по скорости или скольжению.
В частности, коммерческие решения включают:
- Самоблокирующиеся дифференциалы в зависимости от нагрузки с многодисковой муфтой,
- зависимые от нагрузки самоблокирующиеся дифференциалы с червячной передачей (Torsen®),
- Самоблокирующиеся дифференциалы с функцией проскальзывания с гидравлической муфтой,
- с электронным управлением (автоматическим) блокировкой дифференциалов с герметизированными многодисковыми сцеплениями,
- кулачковые самоблокирующиеся дифференциалы.
В этом анализе в трансмиссии используется самоблокирующийся дифференциал с многодисковыми муфтами производства Drexler® Motorsport GmbH. Мы видим его в разобранном виде, на котором мы можем видеть шестерни и сцепления.
[1] дифференциал; [2] дифференциальный вал; [3] нажимные кольца; [4] внешние пластины; [5] внутренние пластины; [6] осевые конические шестерни; [7] пластинчатые пружины; [8] выемки.Рис.3: Блокировка дифференциала с предварительно нагруженными многодисковыми муфтами Lok-O-Matic. Верхняя полусекция: дифференциал без предварительного натяга.Нижняя полусекция: дифференциал с предварительным натягом (Automotive Transmission — Naunheimer, Bertsche, Ryborz, Novak)
Эффект блокировки самоблокирующегося дифференциала с многодисковой муфтой основан на зависящем от крутящего момента внутреннем трении, создаваемом двумя многодисковыми муфтами, симметрично установленными в кожухе дифференциала. Самоблокирующееся действие является результатом комбинации зависимости нагрузки и нагрузки пружины многодисковых муфт. Эффект блокировки в зависимости от нагрузки (рис. 3, вверху) зависит от входного крутящего момента T 1, приложенного к каркасу дифференциала [ 1 ] , передаваемому через вал дифференциала [ 2 ] на два нажимные кольца [ 3 ] в клетке дифференциала [ 1 ] , которые заблокированы на кручение, но скользят в осевом направлении.Под нагрузкой блокирующие усилия автоматически возникают на поверхностях призматических выемок [ 8 ] в прижимных кольцах (см. Деталь на рис. 3), сжимая диски сцепления вместе. Наружные пластины [ 4 ] торсионно заблокированы с клеткой дифференциала [ 1 ], а внутренние пластины [ 5 ] скручены с коническими шестернями оси [ 6 ].
Фрикционный контакт между пластинами, таким образом, противодействует разным скоростям приводного вала (например, когда колесо вращается) с точно определенной силой.Этот эффект увеличивается с увеличением входного крутящего момента. Поскольку силы блокировки пропорциональны передаваемому крутящему моменту, эффект блокировки адаптируется к изменяющемуся крутящему моменту двигателя и увеличению крутящего момента на различных передачах, но величина блокировки — нет.
Пластинчатые пружины [ 7 ], которые могут быть установлены для предварительной нагрузки многодисковой муфты, создают постоянный начальный эффект блокировки, который не зависит от передаваемого крутящего момента, но иногда издает заметный скрип. Это делает систему способной к блокировке даже на крайне неблагоприятных поверхностях, например, одно колесо на льду.Тем не менее, недостатком является то, что дифференциал этого типа всегда имеет основной момент блокировки. Это может быть нежелательно при парковке и на поворотах без пробуксовки.
В модели, принятой для анализа поведения автомобиля, отсутствует тарельчатая пружина [ 7 ], потому что колея более узкая, извилистая и не такая быстрая. Наличие постоянного эффекта блокировки (который не зависит от передаваемого крутящего момента) придает автомобилю чрезмерную управляемость (нет оптимальных условий).По этой причине пластинчатая пружина была исключена и заменена простой металлической шайбой, которая имеет ту же толщину, что и нагруженная пластинчатая пружина.
Еще один недостаток, который следует иметь в виду, заключается в том, что во время процесса самоблокировки или компенсации геометрия зубьев конических шестерен отрицательно изменяется, поскольку используемые фрикционные муфты не должны иметь зазора.
МОДЕЛИРОВАНИЕ
МОДЕЛИРОВАНИЕ ДИФФЕРЕНЦИАЛА
Рис.4: Покомпонентное изображение дифференциала
У нас уже были файлы САПР и массовые характеристики всех деталей дифференциала, предоставленные непосредственно производителем.
Сборка в основном следует осевому расположению, поэтому было довольно просто расположить все трения и шестерни вдоль корпуса дифференциала, используя в основном шарниры кронштейнов с отключенной желаемой степенью свободы в шарнире. На внешнем трении мы также заблокировали вращение относительно корпуса дифференциала, чтобы обеспечить твердое вращение этих частей, и разблокировать это вращение за счет внутреннего трения, чтобы они могли вращаться свободно.Та же стратегия была использована для соединения вращения боковых конических шестерен с внутренним трением, оставляя свободным осевое движение
Рис.5: C-образная структура, используемая для соединения шестерен
У нас есть 2 боковые конические шестерни и 4 конические шестерни. На модели мы использовали только 1 коническую шестерню, потому что на реальном дифференциале их 4, просто из соображений симметрии и распределения нагрузки, а не из кинематографических соображений, что является предметом этого исследования. Зубчатое соединение работает только с шестернями, которые оси вращения закреплены на той же наземной части.Поэтому мы создали «вымышленную» невесомую деталь в форме буквы «C», чтобы соединить три шестерни.
Другой проблемой было поведение трения:
Рис.6: фрикционный контактный элемент
Во-первых, мы использовали одну пару трения на каждую сторону вместо четырех контактных поверхностей на каждой стороне, как в реальной системе. Что касается шестерен, то целесообразно распределить усилия и обеспечить достаточное соотношение крутящего момента и осевого усилия. Мы могли создать такую же ситуацию, только установив соответствующий коэффициент трения.
- Мы пытались использовать контакт CAD, но форма трения была слишком сложной для правильного построения сетки, а LMS не давала возможности установить многие параметры.
- Элемент «трения» работал только как рассеивание энергии на поворотном шарнире, поэтому мы не могли заставить его зависеть от осевой силы.
- Решение заключалось в создании двух сфер на одном трении и плоскости на другом, а затем контактного элемента между сферами и плоскостью. Мы использовали контакт Герца и установили модуль Юнга (206 ГПа) и коэффициент Пуассона (0,3), чтобы обеспечить небольшую деформацию сфер.
Оптимальный коэффициент трения для представления реального дифференциала оказался равным 0,8. Мы провели несколько тестов блокировки, чтобы увидеть максимальный процент блокировки. Очевидно, что в сравнительных тестах с открытым дифференциалом мы установили этот параметр на 0, чтобы избежать блокировки.
Рис.7: контактный элемент рампы / оси
Такой же контакт использовался для контакта между осью солнечной батареи и пандусами дифференциала.
На край оси поместили сферу, а на поверхности пандуса создали плоскость.
Мы использовали контакт Герца и установили модуль Юнга (206 ГПа) и коэффициент Пуассона (0,3) стали, как это есть на самом деле. Мы реализовали как ускорение, так и тормозные рампы для обеих сторон дифференциала.
Пластинчатые пружины могут предварительно нагружать многодисковое сцепление и создавать постоянный начальный эффект блокировки, который не зависит от передаваемого крутящего момента. В данной модели дифференциала пластинчатая пружина заменена на простую шайбу с такой же осевой толщиной пластинчатых пружин в нормальном состоянии работы в сепараторе дифференциала и с такими же массовыми характеристиками пластинчатой пружины.
МОДЕЛИРОВАНИЕ АВТОМОБИЛЯ
Рис.8: Модель автомобиля
После определения дифференциала мы устанавливаем его на MG06 / 11, соединяя его с поворотным шарниром, к которому прилагается крутящий момент шестерни. У нас еще был CAD рамы, корпуса и стоек. Затем мы могли бы создать точки, в которых подвешивается подвеска, имея координаты, заданные программой оптимизации «Lotus».
Рис.9: Деталь модели подвески
Затем мы создали простые одномерные элементы для треугольников, рулевых тяг и тяг подвески.Затем мы разместили элементы TSDA там, где расположены настоящая пружина и демпфер. Для пружины мы использовали реальные значения базовой настройки автомобиля спереди и более жесткую подвеску сзади, чтобы подчеркнуть передачу нагрузки по задней оси, чтобы дифференциал работал более заметно.
| Муравей | пост | |
| Свободная длина [мм] | 200 | 245 |
| Пружина [Н / м] | 40000 | 100000 |
| Демпфирование [кг / с] | 100000 | 100000 |
Для шин использовалась простая модель шины с параметрами в диапазоне, рекомендованном в онлайн-справке LMS.Единственным параметром, который мы могли проверить, был коэффициент трения 1,2, указанный производителем как максимальное значение в оптимальных температурных условиях.
| Радиус [мм] | 255 | |
| Константа демпфирования [кг / с] | 3000 | |
| Сопротивление качению | 0,05 | |
| Коэффициент трения | 1.-2 рад-1] | 10000 |
| Вертикальная жесткость [Н / м] | 300000 |
Геометрия рулевого управления также была реальной (с учетом угла Аккермана) и контролировалась с помощью управляющего входа траектории и выходного управляющего сигнала, действующего с силой на рулевую тягу.
Другие части автомобиля (тормозная система, двигатель, выхлопная система, водитель и т. Д.) Не были реализованы, поскольку в этом анализе они не нужны.
Мы создаем массу, равную весу автомобиля, и размещаем ее там, где находится центр масс автомобиля.
МОДЕЛИРОВАНИЕ И РЕЗУЛЬТАТЫ
ТЕСТ НА ПРЯМОЙ
Сначала мы решили провести несколько тестов на прямой, чтобы проверить дифференциальную модель.
Мы создали простой прямой путь и использовали управляющий вход следящего за траекторией, чтобы поддерживать транспортное средство на дороге, используя следующие параметры для управляющего входа:
| Параметр | Значение |
| Прирост позиции | 4 |
| Прирост скорости | 400 |
| Расстояние просмотра вперед [мм] | 3500 |
Мы использовали этот элемент управления для создания силы привода на рулевой штанге с выходом управления шарниром.
Испытание заключалось в периоде оценки в 1 секунду, позволяющем транспортному средству занять нейтральное положение, и в применении кривой крутящего момента к дифференциалу в течение 6 секунд моделирования.
Было проведено 3 различных теста:
- P1: С БЛОКИРОВКОЙ, ПОЛНЫЙ ЗАХВАТ
Первое испытание проводилось с шинами с полным сцеплением. Автомобиль разгоняется с максимальной скоростью, не теряя сцепления, шины передают на землю весь крутящий момент, поступающий от дифференциала, в равных частях.
P1 Youtube видео
- P2: С БЛОКИРОВКОЙ, ЛЕВЫЕ ШИНЫ БЕЗ ЗАХВАТА
Второй тест был проведен с учетом сцепления только с правыми шинами и, таким образом, имитирует ситуацию, когда левые шины находятся на льду, чтобы подчеркнуть работу дифференциала.
Коэффициент трения дифференциала был установлен на 0,8, значение, которое мы получили после некоторых испытаний, подтверждающих предписанный производителем процент блокировки для нашей конфигурации дифференциала.
Автомобиль изо всех сил пытается двигаться, но даже если левая шина не сцепляется с дорогой, блокировка дифференциала позволяет крутящему моменту достигать шины с захватом, заставляя автомобиль ускоряться.
P2 видео на Youtube
- P3: БЕЗ БЛОКИРОВКИ, ЛЕВАЯ ШИНА БЕЗ ЗАХВАТА
Давая нулевой коэффициент трения дифференциальному трению, мы заставили дифференциал работать как «открытый».
Очевидно, что дифференциал не может передать крутящий момент на землю.Большая часть крутящего момента ускоряет колесо без сцепления, и только очень слабый процент достигает колеса с сцеплением.
Автомобиль преодолевает меньшее расстояние, чем с эффектом автоблокировки, и имеет меньшее ускорение.
P3 Youtube видео
График 1: Импульс, передаваемый полуосями
Кривая крутящего момента (желтая линия) одинакова для трех испытаний.
При «открытом» дифференциале крутящий момент на правое и левое колесо практически одинаков. С самоблокирующимся дифференциалом большая часть крутящего момента поступает на колесо с хорошим сцеплением, что определяет лучшее ускорение.
График 2: Нормальная сила на фрикционных дисках
Нормальная сила на фрикционных дисках зависит только от приложенного крутящего момента, а не от процента блокировки. Фактически то же самое с «открытой» и самоблокирующейся конфигурациями.
График 3: Скорость вращения задних колес
При полном захвате (P1) колеса вращаются с одинаковой скоростью, потому что они получают одинаковый крутящий момент.
В P2 левое колесо (без сцепления) вращается, а правое (с хорошим сцеплением) ускоряет машину.
В P3 левое колесо вращается намного более равномерно, забирая крутящий момент с правого колеса, что фактически медленнее, чем в P2, и, таким образом, приводит к худшему ускорению автомобиля.
График 4: Реальное пробуксовка колес
Пробуксовка определяется как разница между скоростью ведущего и заднего колес, деленная на скорость ведущего колеса.Это соотношение указывает на числовое значение скорости дифференциала и задних колес. При полном сцеплении (P1) пробуксовка отсутствует, при плохом сцеплении на левых шинах пробуксовка уменьшается при блокировке (P2) и постоянно при «открытом» дифференциале (P3).
График 5: Расстояние, пройденное автомобилем
Анализируя P2 и P3, можно увидеть, как с самоблокирующимся дифференциалом автомобиль проезжает большее расстояние из-за лучшего ускорения.
Конечно, в P1 (с большим сцеплением) машина проезжает еще большее расстояние.
График 6: Скорость автомобиля
С самоблокирующимся дифференциалом автомобиль достигает более высоких скоростей за то же время (6 с), что и моделирование
ТЕСТ ПО КРИВОЙ С ПОСТОЯННЫМ РАДИУСОМ
Во второй раз мы решили провести несколько тестов на трассе с кривой, состоящей из 3-х прямых.5 м, кривая с постоянным радиусом 10 м и углом 90 ° и, наконец, прямая 5 м.
На этот раз мы использовали следующие параметры для управляющего входа:
| Параметр | Значение |
| Прирост позиции | 20 |
| Прирост скорости | 400 |
| Расстояние просмотра вперед [мм] | 3500 |
«Управляющий вход следящего за траекторией» создает усилие привода на рулевой штанге с выходным сигналом совместного управления, который дает автомобилю возможность следовать по средней линии траектории.
Как и в случае с прямой, испытание заключалось в периоде оценки в 1 секунду, чтобы позволить транспортному средству занять нейтральное положение. Тест закончился на 5,7 с.
Мы применили кривую крутящего момента к корпусу дифференциала с максимальным значением 420 Нм.
- P4: С БЛОКИРОВКОЙ, ПОЛНАЯ ЗАХВАТА
Первое испытание было проведено с шинами при полном сцеплении с дорогой и, как видно из прямого испытания, коэффициент трения дифференциального трения был установлен на 0,8.Автомобиль разгоняется с максимальной скоростью, не теряя центральной линии пути, но шины не могут передать на землю весь крутящий момент, поступающий от дифференциала, в равных частях. На графике крутящего момента можно увидеть, что максимальное соотношение крутящего момента между внутренними и внешними задними колесами составляет около 60%. Это подтверждает реальное значение передаточного числа крутящего момента, указанное производителем дифференциала, как и ожидалось.
P4 Youtube видео
График 7: Кривая крутящего момента и количества движения, передаваемых полуосями
Кривая крутящего момента (синяя линия) одинакова для двух тестов.
В P5 крутящий момент, действующий на два полуоси, получается идентичным из-за «открытого» дифференциала. Однако в P4 крутящий момент получается другим из-за самоблокирующегося дифференциала. Как видно на прямом тесте, большая часть крутящего момента приходится на колесо с хорошим сцеплением. Можно увидеть, что максимальное соотношение крутящего момента между внутренними и внешними задними колесами составляет около 60% от максимума, как и ожидалось.
График 8: Нормальное усилие на фрикционные пластины
График показывает наличие высокого градиента силы, когда крутящий момент быстро увеличивается и когда крутящий момент медленно уменьшается (из-за угла наклона 50 ° при замедлении).Как и на прямой, графики сначала идентичны, а затем различаются из-за разного поведения машины на выходе из поворота.
График 9: Скорость вращения задних колес
В P5 угловая скорость заднего левого колеса (внутреннего колеса) очень высока из-за потери сцепления и большого крутящего момента, поступающего от дифференциала. В P4 угловая скорость задних колес более схожа из-за эффекта блокировки.
График 10: Реальное пробуксовка колес
Пробуксовка определяется как разница между скоростью ведущего и заднего колес, деленная на скорость ведущего колеса. Это соотношение указывает на числовое значение скорости дифференциала и задних колес.
Большие пробуксовки достигаются при «открытой» конфигурации дифференциала (P5)
График 11: Импульс рыскания
Непосредственным следствием блокировки дифференциала является увеличение момента рыскания из-за разницы продольных сил задних колес.
Автомобиль имеет избыточную поворачиваемость, требующую от водителя больших навыков вождения, но определяющую лучшие характеристики.
График 12: Плечо эквивалентной силы тяги
Плечо эквивалентной силы тяги получается при уменьшении импульса рыскания на сумму сил тяги на задних колесах. Положительно, если сила находится справа от центра тяжести автомобиля, так что импульс дает положительный результат.
Чем больше рука, тем больше инерция рыскания.
График 13: Расстояние, пройденное автомобилем
С самоблокирующимся дифференциалом максимальное пройденное расстояние составляет 20,3 м, а с «открытым» дифференциалом — всего 19,5 м за то же время моделирования.
График 14: Скорость автомобиля
Скорость автомобиля точно такая же во время прямого и углового въезда, но при подаче мощности на вершине угла самоблокирующийся дифференциал обеспечивает лучшее сцепление и позволяет лучше ускоряться на выходе из поворота.
Скорость в и симуляции составляет 10,6 м / с с блокировкой и только 9,6 м / с с «открытым» дифференциалом »
Преимущества самоблокирующегося дифференциала с точки зрения максимальной скорости и максимального пройденного расстояния идут в ущерб устойчивости и управляемости автомобиля, обеспечивая избыточную поворачиваемость (вместо недостаточной поворачиваемости) с большим усилием и концентрацией, требующимися от водитель.
ВЫВОДЫ
Испытания на прямой позволили проверить поведение дифференциальной модели LMS, в частности, максимально достижимый процент блокировки. После установки правильного коэффициента трения для фрикционных дисков мы увидели, что для разных крутящих моментов двигателя процент блокировки всегда составлял около 60%, как предписано производителем для рампы, которую мы использовали в моделировании (наклон 40 °).
Тест с левыми шинами без сцепления (как на льду) показал различное поведение между открытым дифференциалом, когда автомобиль изо всех сил пытается двигаться вперед и передает большую часть крутящего момента на колесо с плохим сцеплением с дорогой, и самоблокирующимся дифференциалом с автомобилем. меньше трудностей при движении, потому что 60% крутящего момента передается на колесо с хорошим сцеплением.
Второй тест с автомобилем в реальных условиях гонки (угол 90 ° при полном ускорении) показал потенциал дифференциала на гоночной трассе.
Выполнение поворота с той же кривой крутящего момента, исходящей от двигателя, дало лучшие результаты с самоблокирующимся дифференциалом. Автомобиль преодолел большее расстояние за то же время (20,4 м против 19,6 м), а также вышел из поворота с большей скоростью (38,22 км / ч против 34,74 км / ч).
Преимущества подчеркиваются выбранными нами параметрами (радиус поворота, кривая крутящего момента двигателя, сцепление шины с дорогой), но даже если это преимущество может быть меньше, мы должны учитывать, что на круге, сделанном примерно из 10-15 поворотов, преимущество будет последовательным и наверняка может иметь значение.
Очевидно, что дифференциал должен быть правильно настроен с правильной рампой дифференциала (также по отношению к трассе), чтобы избежать проблем с управляемостью или плохой маневренности в очень крутых поворотах. Плохая настройка может привести к худшим характеристикам по сравнению с открытым дифференциалом, но это не было нашей целью.
В этой работе мы подтвердили правильность функционирования реализованной нами дифференциальной модели, а затем мы привели несколько примеров рабочих условий, в которых она продемонстрировала свою работу, как ожидалось, а также лучшую, чем обычный открытый дифференциал, при правильной настройке.