По какой траектории вы можете выполнить разворот: Все вопросы под номером 9 из билетов ПДД онлайн
ПДД 8.6 — Траектория поворота
По какой траектории Вы можете выполнить правый поворот?
| 1. | ? | Только по А. |
| 2. | ? | Только по Б. |
| 3. | ? | По любой. |
Поворачивая направо, вы должны двигаться ближе к правому краю проезжей части, т.е. по траектории А.
По какой траектории Вы можете выполнить поворот направо?
| 1. | ? | Только по Б. |
| 2. | ? | Только по А. |
| 3. | ? | По любой. |
При повороте направо Вы должны двигаться по возможности ближе к правому краю проезжей части, т.е. поворот следует выполнять по траектории А.
По какой траектории Вы можете продолжить движение?
| 1. | ? | По любой. |
| 2. | ? | Только по А. |
3. | ? | Только по А или В. |
На данном перекрестке установлен знак «Выезд на дорогу с односторонним движением» , который не запрещает движение прямо и направо. При повороте Вы должны двигаться по возможности ближе к правому краю проезжей части. Следовательно, движение на перекрестке можно продолжить только по траекториям А и В.
По какой траектории Вам разрешено продолжить движение налево?
| 1. | ? | Только по А. |
| 2. | ? | Только по В. |
| 3. | ? | По любой. |
Поворот налево может осуществляться на любую полосу пересекаемой проезжей части, но при выезде с пересекаемых проезжих частей, нельзя оказаться на полосе встречного движения.
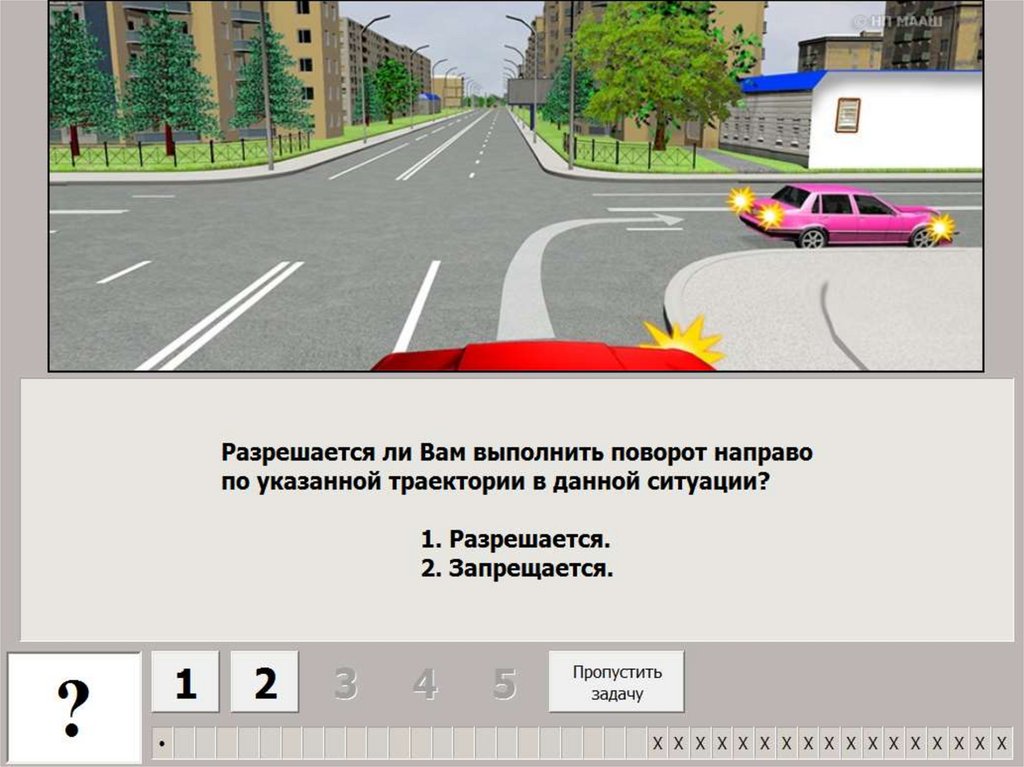
Разрешен ли Вам поворот направо по указанной траектории в данной ситуации?
| 1. | ? | Нет. |
| 2. | ? | Да.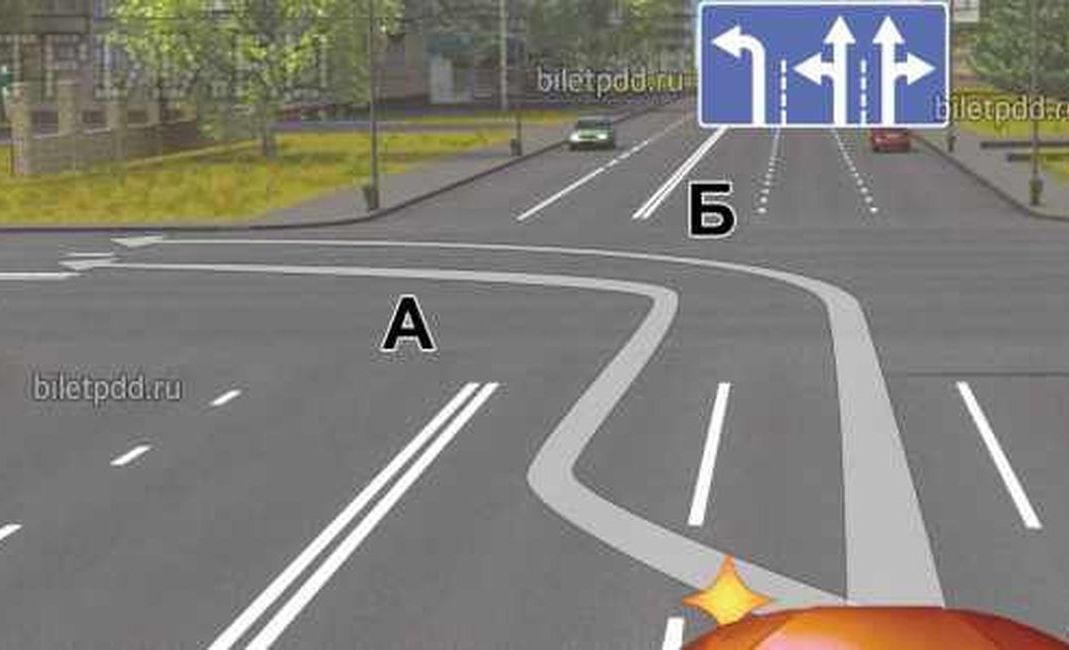 |
При повороте направо Вы должны двигаться по возможности ближе к правому краю проезжей части. Поскольку в данной ситуации правая полоса дороги, на которую Вы поворачиваете, занята стоящим автомобилем, поворот направо по указанной траектории разрешен.
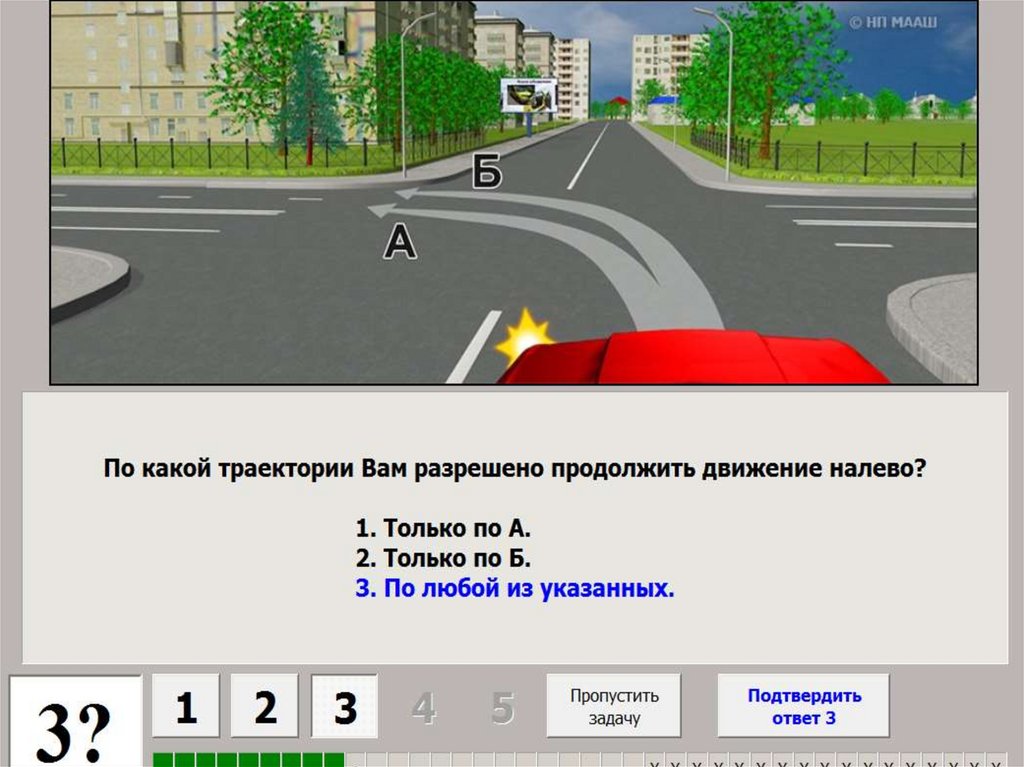
По какой траектории Вам разрешено продолжить движение налево?
| 1. | ? | Только по А. |
| 2. | ? | Только по Б. |
| 3. | ? | По любой. |
Поворот налево может осуществляться на любую полосу пересекаемой проезжей части, однако при выезде с пересечения проезжих частей вы не должны оказаться на стороне встречного движения.
Вам разрешено продолжить движение:
| 1. | ? | Только по траектории А. |
| 2. | ? | Только по траектории Б. |
| 3. | ? | По траекториям А и Б. |
4. | ? | По траекториям Б и В. |
| 5. | ? | По любой траектории из указанных. |
Вы можете продолжить движение только по траектории Б, так как, повернув по траектории А, вы не выполните требование двигаться по возможности ближе к правому краю проезжей части, а продолжать дальнейшее движение по полосе для маршрутных ТС по траектории В запрещено.
По какой траектории Правила разрешают Вам произвести поворот налево?
| 1. | ? | Только по А. |
| 2. | ? | Только по Б. |
| 3. | ? | По любой. |
Знак «Выезд на дорогу с односторонним движением» информирует о том, что на пересекаемой проезжей части движение осуществляется не только по правой, но и по левой полосе. Следовательно, вы можете поворачивать налево по любой из двух траекторий.
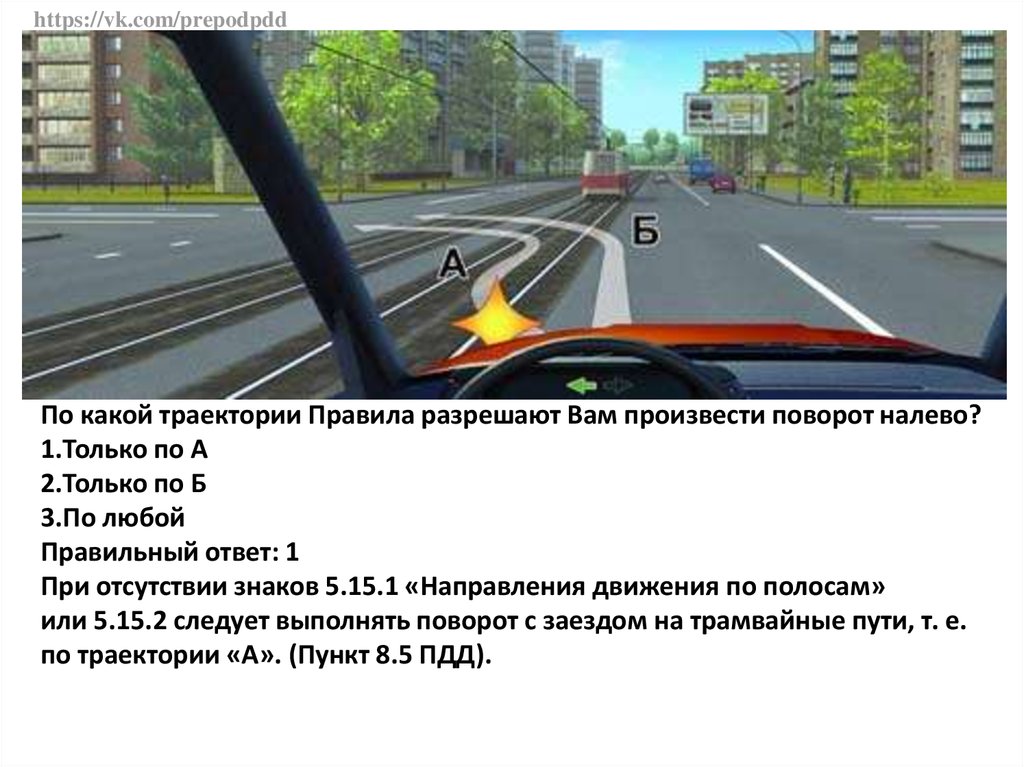
По какой траектории Правила разрешают Вам произвести поворот налево?
1. | ? | Только по А. |
| 2. | ? | Только по Б. |
| 3. | ? | По любой. |
Поворачивая налево, вы должны двигаться так, чтобы при выезде с пересечения проезжих частей автомобиль не оказался на стороне встречного движения, т.е. двигаться можно только по траектории Б.
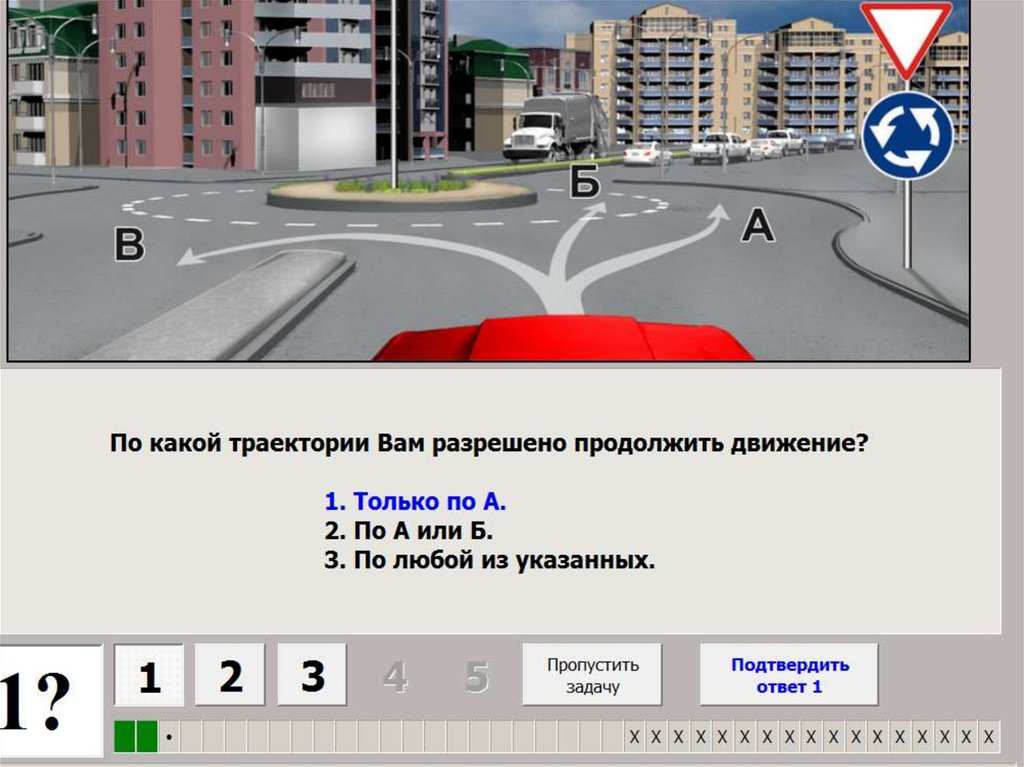
По какой траектории Вы можете продолжить движение?
| 1. | ? | Только по А. |
| 2. | ? | Только по А или Б. |
| 3. | ? | По любой. |
Знак круговое движение предписывает Вам движение на данном перекрестке в направлении, указанном стрелками. При повороте направо Вы должны двигаться по возможности ближе к правому краю проезжей части. В данном случае Вы можете продолжить движение только по траектории А.
Водитель какого автомобиля, поворачивая налево, не нарушает Правила?
1. | ? | Только легкового. |
| 2. | ? | Только грузового. |
| 3. | ? | Оба не нарушают. |
Въезжая на трехполосную дорогу, Вы должны помнить, что средняя полоса такой дороги перед перекрестком предназначена для автомобилей, поворачивающих налево. Поэтому в данной ситуации не нарушает Правила только водитель грузового автомобиля, завершающий поворот налево без выезда на полосу встречного движения.
Кто нарушает правила поворота на перекрестке?
| 1. | ? | Только водитель мотоцикла, поворачивающий налево. |
| 2. | ? | Только водитель автомобиля. |
| 3. | ? | Оба нарушают. |
| 4. | ? | Никто не нарушает. |
Ответ.
- Водитель мотоцикла, поворачивающий налево, должен был занять на проезжей части данного направления не только левую полосу, но и крайнее левое положение на ней.

- Водитель легкового автомобиля при повороте направо должен был двигаться ближе к правому краю проезжей части, т.е. повернуть на крайнюю правую полосу.

Следовательно, оба водителя нарушают Правила.
Водитель какого транспортного средства нарушает Правила?
| 1. | ? | Только легкового автомобиля. |
| 2. | ? | Обоих транспортных средств. |
| 3. | ? | Никто не нарушает. |
Знак круговое движение информирует о том, что на данном перекрестке организовано круговое движение.
- При въезде на такие перекрестки не обязательно занимать крайнее правое положение на проезжей части.
- Что же касается выезда с перекрестка, то здесь действует общее для всех перекрестков правило — для поворота направо необходимо занять крайнее правое положение и поворот должен осуществляться на крайнюю правую полосу.
Этому правилу следует лишь водитель грузового автомобиля. Правильный ответ — Только легкового автомобиля.
Правильный ответ — Только легкового автомобиля.
|
Навигация: Главная Случайная страница Обратная связь ТОП Интересно знать Избранные Топ: Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному… Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре… Интересное: Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья… Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным. Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются… Дисциплины: Автоматизация Антропология Археология Архитектура Аудит Биология Бухгалтерия Военная наука Генетика География Геология Демография Журналистика Зоология Иностранные языки Информатика Искусство История Кинематография Компьютеризация Кораблестроение Кулинария Культура Лексикология Лингвистика Литература Логика Маркетинг Математика Машиностроение Медицина Менеджмент Металлургия Метрология Механика Музыкология Науковедение Образование Охрана Труда Педагогика Политология Правоотношение Предпринимательство Приборостроение Программирование Производство Промышленность Психология Радиосвязь Религия Риторика Социология Спорт Стандартизация Статистика Строительство Теология Технологии Торговля Транспорт Фармакология Физика Физиология Философия Финансы Химия Хозяйство Черчение Экология Экономика Электроника Энергетика Юриспруденция |
⇐ ПредыдущаяСтр 3 из 5Следующая ⇒ Комментарий: Знак 4.
БИЛЕТ №28 ВОПРОС №9 Разрешено ли водителю подъехать задним ходом к пассажиру на этом участке дороги? 1. Да. 2. Нет. Ответ: 1. Да. Комментарий: Знак 4.1.1 «Движение прямо» не запрещает движение задним ходом. БИЛЕТ №30 ВОПРОС №2 По какой траектории Вы можете выполнить разворот? 1. Только по А. 2. Только по Б.. 3. По любой. Ответ: 2. Только по Б. Комментарий: Примыкающая слева дорога имеет две проезжие части, и знак 4. БИЛЕТ №35 ВОПРОС №2 В каких из указанных направлений Вы можете продолжить движение на следующем перекрестке? 1. Только Б. 2. А или Б. 3. Во всех. Ответ: 3. Во всех .Комментарий: Знак 4.1.1 «Движение прямо», установленный в начале участка дороги (за перекрестком), запрещает повороты налево и развороты на этом участке. Действие знака в таких случаях распространяется до ближайшего по ходу движения перекрестка, маневры на котором этим знаком никак не ограничиваются. Следовательно, вы можете двигаться в любом из перечисленных направлений. БИЛЕТ №36 ВОПРОС №9 * По какой траектории Вам разрешено выполнить разворот? 1. Только по А.. 2. Только по Б. 3. Ни по одной из предложенных. Ответ: 1. Только по А. Комментарий: Знак 4.1.1 «Движение прямо» действует только на ближайшее пересечение проезжих частей, перед которыми он установлен (до разделительной полосы). Разворот на втором пересечении, т.е. по траектории А, разрешен.
Знак 4.1.2 обязывает водителей двигаться только в том направлении, которое изображено на знаке (только направо), за исключением маршрутных транспортных средств. Поворот направо по возможности должен осуществляться как можно ближе к правому краю проезжей части. УСТАНАВЛИВАЕТСЯ: Непосредственно у пересечения проезжих частей; распространяет свое действие только на первое пересечение. ЭКЗАМЕНАЦИОННЫЕ ВОПРОСЫ К ЗНАКУ 4.1.2 «ДВИЖЕНИЕ НАПРАВО» БИЛЕТ №3 ВОПРОС №8 По какой траектории Вы можете выполнить правый поворот? 1. По любой. 2. Только по А.. 3. Только по Б. Ответ: 2. Только по А. Комментарий: При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части. БИЛЕТ №15 ВОПРОС №16 * По какой траектории можно продолжить движение направо на легковом автомобиле? 1. По А и Б. 2. Только по Б. 3. Только по А. 4. По Б и В. 5. По любой. 2. Только по Б. Комментарий: При повороте направо правила требуют двигаться по возможности ближе к правому краю. БИЛЕТ №24 ВОПРОС №4 Какие знаки обязывают водителя грузового автомобиля с разрешенной максимальной массой до 3,5 т повернуть направо? 1.Только А. 2. Только Б.. 3. А и Б. 4. Б и В. Ответ: 2. Только Б. Комментарий: Только предписывающий знак «Б» 4.1.2 «Движение направо» всегда обязывает водителя повернуть направо. Его действие не распространяется только на маршрутные транспортные средства (Приложение 1). БИЛЕТ №25 ВОПРОС №7 Обязаны ли Вы включить указатели поворота в данной ситуации? 1. Да 2. Нет. 3. Да, но только при наличии на перекрестке других транспортных средств. Ответ: 1. Комментарий: На данном перекрестке, руководствуясь знаком 4.1.2 «Движение направо», Вы можете продолжить движение только направо. При этом Вы обязаны включить соответствующие этому маневру правые световые указатели поворота (пункт 8.1 правил ). БИЛЕТ №28 ВОПРОС №2 По какой траектории Вы можете продолжить движение? 1. Только по А.. 2. Только по Б. 3. По любой. Ответ: . Только по А. Комментарий: На этом перекрестке на пересекаемой дороге три проезжие части. Знак 4.1.2 «Движение направо» распространяет свое действие только на первое пересечение проезжих частей, перед которым он установлен, предписывая всем ТС поворот направо на первую проезжую часть, т.е. только по траектории А.
Знак 4.1.3 Обязывает водителей двигаться только в том направлении, которое изображено на знаке (только налево или разворот), за исключением маршрутных транспортных средств. Поворот налево должен осуществляться из крайнего левого ряда. УСТАНАВЛИВАЕТСЯ: Непосредственно у пересечения проезжих частей; распространяет свое действие только на первое пересечение.
Тема 8.3. Повороты.(из 5) Задача 04
Поворот налево. В Правилах нигде не сказано, что в процессе поворота налево водители обязаны держаться как можно левее или как можно правее. Другое дело, что перед входом в поворот водители обязаны заблаговременно занять соответствующее крайнее положение на проезжей части Правила. Раздел 8. Пункт 8.5. Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении. Правила. То есть, завершая поворот налево, разрешается заезжать на любую свободную полосу. Что же касается выезда на встречку, то, в принципе, это можно сделать и при повороте направо (например, взять и повернуть направо по траектории Б). Правда, сотворить такое можно, только если уж очень захотеть. В то же время при повороте налево водители частенько срезают угол и прокатываются левыми колесами по встречной полосе. А за это, между прочим, можно лишиться прав.
1. Перед поворотом налево водители обязаны заблаговременно занять крайнее левое положение на проезжей части данного направления. 2. Завершая поворот налево можно заезжать на любую свободную полосу движения. 3. В процессе поворота налево ни одним колесом, ни на один миллиметр нельзя оказаться на полосе встречного движения.
Знак 4.1.4 обязывает водителей двигаться только в том направлении, которое изображено на знаке (только прямо или направо), за исключением маршрутных транспортных средств. ⇐ Предыдущая12345Следующая ⇒ Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций. Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого… Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства… Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни… |

 1.1 «Движение прямо», установленный в начале участка дороги, не запрещает повороты направо во дворы и на другие, прилегающие к дороге территории. Однако перед выполнением маневра необходимо подавать сигналы правого поворота, чего водитель не сделал.
1.1 «Движение прямо», установленный в начале участка дороги, не запрещает повороты направо во дворы и на другие, прилегающие к дороге территории. Однако перед выполнением маневра необходимо подавать сигналы правого поворота, чего водитель не сделал. 1.1 «Движение прямо» действует только на первое пересечение проезжих частей, перед которым он установлен, запрещая здесь поворот налево и разворот, а на втором пересечении никаких ограничений на выполнение маневров нет, и здесь Вы можете развернуться (траектория Б). Правильный ответ — Только по Б.
1.1 «Движение прямо» действует только на первое пересечение проезжих частей, перед которым он установлен, запрещая здесь поворот налево и разворот, а на втором пересечении никаких ограничений на выполнение маневров нет, и здесь Вы можете развернуться (траектория Б). Правильный ответ — Только по Б.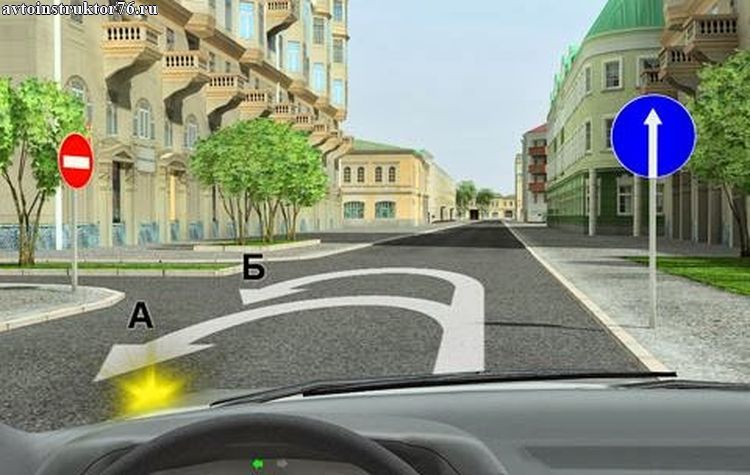

 В данной ситуации вы можете выехать на выделенную полосу для маршрутных транспортных средств и уже с нее перестроиться.
В данной ситуации вы можете выехать на выделенную полосу для маршрутных транспортных средств и уже с нее перестроиться.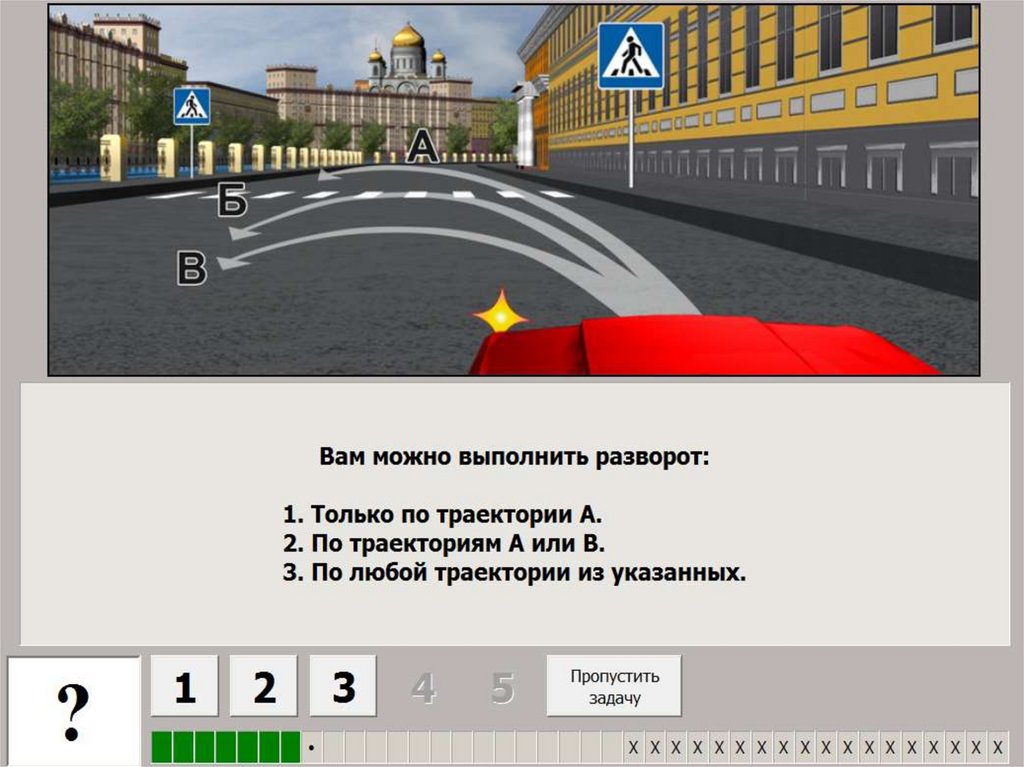 Да.
Да.
 Раздел 8. Пункт 8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
Раздел 8. Пункт 8.6. Поворот должен осуществляться таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство не оказалось на стороне встречного движения.
 Только по А
2 Только по Б.
3. По любой.
Вспоминаем: «Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении».
А теперь смотрим на рисунок.
Дорога, по которой вы едете, только после перекрёстка станет дорогой с двусторонним движением. А до перекрёстка это дорога с односторонним движением! А какое крайнее положение для поворота налево может быть на дороге с односторонним движением? Только на крайней левой полосе!
Так что поворачивать налево в данной ситуации водители обязаны только по траектории Б.И это логично – правая полоса освободится для тех, кто намерен двигаться прямо или собирается поворачивать направо.
Только по А
2 Только по Б.
3. По любой.
Вспоминаем: «Перед поворотом направо, налево или разворотом водитель обязан заблаговременно занять соответствующее крайнее положение на проезжей части, предназначенной для движения в данном направлении».
А теперь смотрим на рисунок.
Дорога, по которой вы едете, только после перекрёстка станет дорогой с двусторонним движением. А до перекрёстка это дорога с односторонним движением! А какое крайнее положение для поворота налево может быть на дороге с односторонним движением? Только на крайней левой полосе!
Так что поворачивать налево в данной ситуации водители обязаны только по траектории Б.И это логично – правая полоса освободится для тех, кто намерен двигаться прямо или собирается поворачивать направо.
 3. По любой.
Посмотрите на знак, установленный перед перекрестком. Это знак запрещает движения прямо с крайней левой полосы, зато разрешает поворот налево с двух полос. То есть при таком знаке «соответствующее крайнее положение на проезжей части для поворота налево»это и траектория А, и траектория Б. Можете поворачивать налево по любой из них.
3. По любой.
Посмотрите на знак, установленный перед перекрестком. Это знак запрещает движения прямо с крайней левой полосы, зато разрешает поворот налево с двух полос. То есть при таком знаке «соответствующее крайнее положение на проезжей части для поворота налево»это и траектория А, и траектория Б. Можете поворачивать налево по любой из них.
 А Правила требуют совершать поворот налево не просто с крайней левой полосы, а с крайнего левого положения на проезжей части данного направления (то есть так, чтобы левее вас никто не мог двигаться).
А Правила требуют совершать поворот налево не просто с крайней левой полосы, а с крайнего левого положения на проезжей части данного направления (то есть так, чтобы левее вас никто не мог двигаться).
 ..
..Моделирование траектории транспортных средств, поворачивающих влево, и установка направляющих линий на перекрестке
На этой странице , и конфликты повлияют на работу и безопасность движения. Для решения задачи путем извлечения траекторий движения левоповоротных транспортных средств и анализа характеристик распределения траекторий, характеристик изменения скорости и характеристик изменения потока была создана модель траектории левоповоротного транспортного средства. На основе вышеизложенного исследования на примере четырехполосных полос левого поворота была предложена идея установки направляющей линии левого поворота на перекрестке.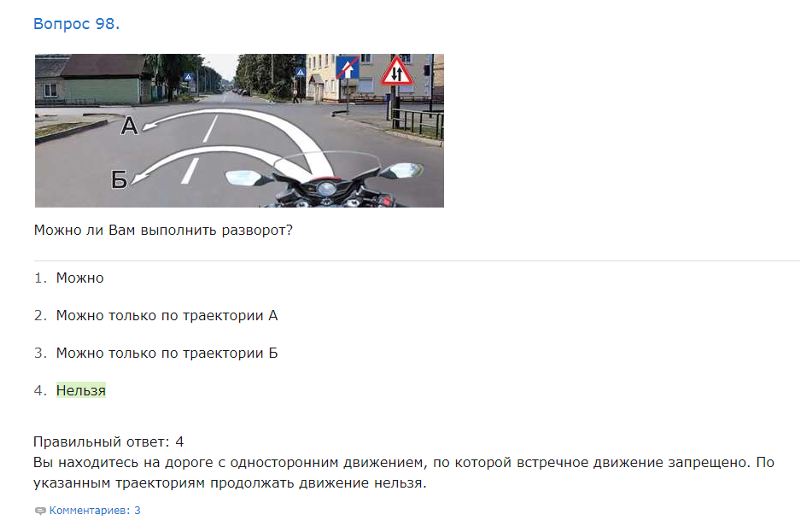 Благодаря проверке экземпляра мы могли сделать вывод, что метод использования направляющей линии левого поворота для управления процессом поворота транспортных средств может эффективно уменьшить дорожные конфликты и задержки и повысить эффективность движения.
Благодаря проверке экземпляра мы могли сделать вывод, что метод использования направляющей линии левого поворота для управления процессом поворота транспортных средств может эффективно уменьшить дорожные конфликты и задержки и повысить эффективность движения.
1. Введение
В большинстве мест в Китае на перекрестке нет указаний по полосе и ограничений, и многие водители хотят как можно скорее выехать на целевую полосу под влиянием психологического стимула. Когда транспортные средства, поворачивающие налево, пересекают стоп-линию и въезжают на перекресток, многие поворачивающие транспортные средства часто произвольно меняют маршрут движения. Явление случайного рассредоточения транспортных средств в пределах перекрестка вызывает серьезные конфликты между транспортными средствами и не позволяет транспортным средствам двигаться плавно. Это снижает эффективность и безопасность дорожного движения. Таким образом, путем анализа и исследования траекторий левоповоротных транспортных средств на перекрестке был предложен метод задания направляющей линии.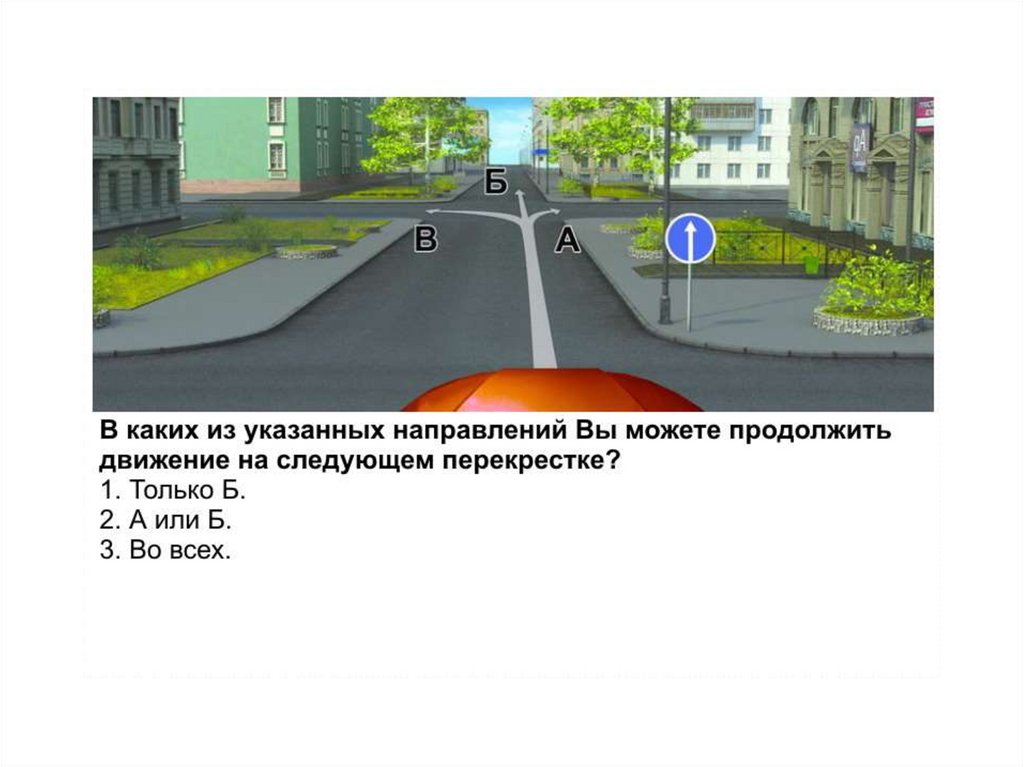 Метод направления транспортных средств, поворачивающих в ряд, представляется необходимым и целесообразным для повышения уровня эффективности и безопасности левоповоротных транспортных средств на перекрестке. Он имеет определенное теоретическое и практическое значение.
Метод направления транспортных средств, поворачивающих в ряд, представляется необходимым и целесообразным для повышения уровня эффективности и безопасности левоповоротных транспортных средств на перекрестке. Он имеет определенное теоретическое и практическое значение.
В последние годы, чтобы уменьшить задержку транспортных средств, поворачивающих налево, на перекрестке и улучшить эксплуатационные характеристики движения, многие ученые провели исследования с разных точек зрения. Например, Ма и Янг [1] изучили скоординированный подход к проектированию группы левоповоротных перекрестков с большим и небольшим количеством людей, принимая во внимание как фазовую координацию, так и пространственную координацию, а также установили модель оптимизации для минимизации общей задержки; Кикучи и др. [2] изучали влияние двойной длины полос для левого поворота на работу. Шен [3] исследовал взаимосвязь между средней задержкой транспортного средства и длиной участка слияния. И она предложила метод определения минимальной длины сливающихся участков для тройных полос левого поворота, у которых полоса движения вниз по течению была меньше, чем полоса въезда. Эйлер [4] изучал проблему тройных полос для левого поворота, которые использовались на больших перекрестках и приводили к высокой частоте аварий и задержке движения. И была предложена концепция артериального обмена. Ву и др. [5] извлекли данные о траекториях левоповоротных транспортных средств с помощью видеометода и предложили метод перевода координат изображения в мировые координаты. Кайт и др. [6] предложили метод IQA для оценки задержки левого поворота. Ци и др. [7] использовали разные модели для оценки длины очереди на левый поворот, и результаты метода, основанного на моделировании, сравнивались с другими. Яо [8] Яо и Чжан [9] изучали синхронизацию сигнала и схему полосы движения коротких полос для левого поворота на изолированном перекрестке или на двух соседних перекрестках; Лю и др. [10] изучили поведение водителей при выборе полосы для левого поворота и указали на основные факторы выбора вне полосы для левого поворота. Мусса и др. [11] использовали систему дополненной реальности (ARV) для изучения маневра левостороннего движения. Многие виртуальные объекты, такие как пешеходы, транспортные средства и другие, можно было увидеть во время вождения в условиях реального дорожного движения. По результатам эксперимента система «АРВ» смогла эффективно улучшить работу водителей. Альхаджасин и др. [12] записали траектории отдельных транспортных средств, используя спиральную кривую Эйлера и круговую кривую с учетом геометрии пересечения, различных типов транспортных средств и скорости. Альхаджасин и др. отметил, что траектории транспортных средств очень важны при анализе маневров водителя. Ли и др. [13] изучали влияние факторов задержки при повороте налево на установку сигнала. Сандо и Мозес [14] исследовали 15 пересечений тройных полос с левым поворотом и изучили влияние геометрических факторов на работу левоповоротного движения. Ву и др. [15] оптимизированы фазы левого поворота для уменьшения задержки. Результаты этих исследований в некоторой степени влияют на уменьшение задержек при повороте налево, конфликтов и т. д. Однако, когда транспортные средства, поворачивающие налево, пересекают стоп-линию и выезжают на перекресток, проблема транспортных средств, мешающих друг другу, не получила должного решения. Транспортные средства случайным образом меняют свои линии, что влияет на уровень безопасности и эксплуатационные характеристики транспортных средств, поворачивающих налево, в процессе их поворота. Ван и др. [16] предложили новую модель сотовой передачи для имитации условий перенасыщенного трафика при блокировке левого поворота. Кунер и др. [17] выдвинул предварительную мысль об использовании направляющих линий для тройных левых поворотов и двойных правых поворотов в Техасе. Би и др. [18–20] изучали прогнозирование прибытия автобусов и другое соответствующее исследовательское содержание, которое можно было бы использовать при формулировании стратегии управления сигналами пересечения нескольких полос движения с левым поворотом в будущем.
На основе существующих исследований в статье обобщены предшественники и подробно изучены траектории поворота транспортных средств внутри перекрестка. С точки зрения как уменьшения дорожных конфликтов, так и повышения эффективности, мы хотим принять некоторые меры для управления потоком поворотов и ограничения смены полосы движения транспортных средств.
На основе обобщения существующей литературы в текущем исследовании используется метод видеообнаружения для извлечения траекторий поворота транспортных средств и изучения характеристик поворачивающих транспортных средств. В текущем исследовании предполагается построить модель траектории поворота, которую можно использовать для демонстрации характеристик поворачивающих транспортных средств и демонстрации процесса поворота транспортного средства. Поэтому процесс конфликтов разворотных машин можно было бы наглядно проиллюстрировать и дополнительно изучить. В связи с наличием серьезных конфликтов между несколькими транспортными средствами, поворачивающими налево, предлагается установить направляющую линию на пересечении нескольких полос движения с левым поворотом. Логическая структура показана на рисунке 1.9.0003
2.1. Извлечение центра транспортного средства и коррекция искажения объектива камеры
Траектории транспортных средств могут эффективно отражать изменения их пространственного положения, скорости, ускорения, условий транспортного потока и плотности транспортных средств в определенное состояние времени. И траектории могут предоставить экспериментальные данные для модели взаимодействия транспортных средств, такие как модель допустимого разрыва, модель следования и модель смены полосы движения. В этой статье меры видеообнаружения используются для получения в реальном времени траекторий транспортных средств, поворачивающих налево, внутри перекрестка. Во-первых, центры поворачивающих транспортных средств внутри перекрестка извлекаются с помощью сложного алгоритма извлечения. А затем отслеживаются их центры, фиксируются координаты положения центров в разное время. С учетом дисторсии объектива камеры корректируется его центр. Наконец, скорректированные координаты изображения преобразуются в мировые координаты и получаются траектории транспортных средств. Центр поворота транспортного средства рассчитывается по следующим уравнениям: где информация о контуре транспортного средства и представляет количество пикселей, включенных в .
Область изображения разделена на прямоугольную область, а центральная координата области изображения равна , при линейном сканировании многоугольника можно получить центральную координату как . Пусть извлеченная координата центра изображения переднего плана будет ; расчетная модель установки для исправления искажения рассчитывается как где , , , и координаты пересечения линии сканирования многоугольника и 4-х сторон целевой области. , определяются как центральная линия изображения в -направлении и в -направлении длины, а , представляют собой масштабные коэффициенты смещения, которые рассчитываются как
Используя описанный выше метод, можно извлечь траектории движения транспортных средств, поворачивающих налево, на перекрестке. Взяв в качестве примера перекресток улиц Тунчжи и Цзиюу-роуд в городе Чанчунь, мы извлекли траектории движения транспортных средств, поворачивающих налево, с востока на юг, и одно из изображений показано на рисунке 2.
2.2. Извлечение смещения транспортного средства и оценка скорости
На основе извлечения центров транспортных средств и коррекции искажения объектива камеры используется усовершенствованный метод фильтрации Калмана для отслеживания центров поворачивающихся транспортных средств и регистрации изменения положения центров. , который мог бы определять координаты центров транспортных средств в каждый момент времени. Поскольку время изменения изображения каждого кадра составляет 0,04 с, за это очень короткое время изменения центрального положения автомобиля очень малы. Таким образом, время каждых пяти кадров составляет 0,2 с, которые выбираются в качестве интервала времени для изучения в процессе расчета. Таким образом, перемещение автомобиля в интервале времени может быть выражено как
Средняя скорость транспортных средств в течение этого интервала времени может быть выражена как где – количество кадров изображения, содержащихся в движущемся перемещении, соответствующем интервалу времени, и – время изображения каждого кадра, которое в документе составляет 0,04 с.
Извлекая перемещение транспортного средства в процессе поворота, записывая время поворота транспортных средств и количество поворачивающих транспортных средств, можно рассчитать среднюю скорость поворачивающих транспортных средств как
Расчет средней скорости поворота транспортных средств может использоваться для измерения эффективности движения транспортных средств при различных условиях установки направляющей линии или без установки объездной линии.
3. Модель траектории левоповоротного автомобиля
3.1. Характеристики поворота транспортных средств с левым поворотом
На основе многолетних наблюдений и исследований типов транспортных средств на перекрестках установлены некоторые характеристики транспортных средств с левым поворотом, которые проявляются в процессе поворота, путем выделения и суммирования характеристики токарных машин, глубокое понимание процесса токарной обработки. Чтобы объективно и эффективно установить модель левоповоротных транспортных средств, предусмотрены некоторые основные приготовления. Характеристики транспортных средств с левым поворотом будут разработаны с трех аспектов следующим образом.
( 1) Распределение траекторий . В один и тот же период времени зеленой фазы, от начала зелени до конца, транспортные средства плотно оборачиваются слой за слоем снаружи внутрь и от разреженного к плотному, что может образовывать огибающую поверхность. После того, как были извлечены и исследованы траектории 120 циклов левоповоротных транспортных средств, можно было сделать такой же вывод. Как показано на рисунке 3, с порядком поворота очереди траектории транспортных средств, проходящих через перекресток, извлекаются во время зеленого поворота налево. Чтобы легко различать траектории разных транспортных средств, для обозначения траекторий разных порядков используются разные цвета, например красный, желтый и синий. Характеристики распределения траекторий могут служить ориентиром для выбора области установки направляющих линий.
( 2) Характеристики изменения скорости поворота . Отслеживая и контролируя скорость транспортных средств, поворачивающих налево, мы могли бы обнаружить, что, когда транспортные средства, поворачивающие налево, меняют свою полосу движения во время поворота, скорость заднего транспортного средства будет показывать очевидную паузу или замедление. Наоборот, если все транспортные средства, поворачивающие налево, не меняют свою полосу движения во время поворота, колебания скорости будут небольшими, а освобождение от движения будет стабильным и эффективным. Таким образом, необходимо направлять движение транспортных средств на поворотах и уменьшать поведение при смене полосы движения. Изменения скорости отражают остроту конфликтов между левоповорачивающими транспортными средствами, и водители вынуждены принимать меры по обеспечению личной безопасности. С другой стороны, извлечение скорости может быть использовано для расчета угла поворота транспортных средств в процессе моделирования траектории.
( 3) Характеристики распределения потока различного поперечного сечения . От въезда на перекресток по диагонали выводят три участка, а также изучаются характеристики распределения потока во времени при въезде на перекресток левоповоротного потока. Из изменения каждой секции на диаграмме потока во времени можно понять дискретные характеристики в процессе поворота транспортных средств, а изменения потока могут также отражаться в условиях боковых конфликтов транспортных средств. Сделайте, например, зеленую фазу поворота налево на перекрестке, которая демонстрирует изменения потока во времени в разных поперечных сечениях, как показано на рис. 4. изменить соответственно.
3.2. Разработка модели траектории
В процессе поворота положение транспортных средств непрерывно изменяется с изменением углов, скоростей и перемещений. Траектории поворота разных транспортных средств могут иметь некоторые различия. Но на одном и том же перекрестке, схема распределения каналов которого фиксирована, траектории поворачивающих транспортных средств имеют некоторую закономерность. А по принципу оптимизации траектории поворачивающих машин всегда стремятся к разумному пути. Диаграмма траектории левого поворота выглядит так, как показано на рис. 5.9.0003
На основе знаний вероятностного и статистического анализа извлекается и подсчитывается большое количество траекторий поворота транспортных средств. В сочетании с характеристиками левого поворота, такими как распределение траектории, характеристики распределения скорости, удаляются траектории с аномальным распределением, а также должны быть удалены траектории, создаваемые транспортными средствами с большими колебаниями скорости. Таким образом, получают выборки траектории транспортного средства, которые формируются в нормальных условиях поворота. Покрытая этими образцами траектории область образовывала геометрическую фигуру. Затем извлекается центральная линия геометрической фигуры от въезда в направлении выезда. После плавной обработки центральной линии отображается приемлемый путь для транспортных средств, поворачивающих налево. Создайте модель для разумной траектории пути и возьмите пересечение на рисунке 5 в качестве примера; разумный путь транспортных средств, поворачивающих налево, показан дугой AB. Пусть количество полос движения в направлении восток-запад на перекрестке будет EW.ln, пусть ширина полосы будет EW.lw, а зеленая полоса будет EW.grw; а количество полос движения в направлении юг-север — SN.ln, ширина полосы — SN.lw, а зеленая полоса — SN.grw. Безопасный боковой зазор составляет и . Точкой считался центр поворота, находящийся в левом нижнем углу перекрестка. ds — расстояние по вертикали от крайней границы полосы движения западного входа до точки . , , которые являются радиусами поворота начала и конца дуги, определяются как и рассчитываются как
При изменении положения автомобиля, поворачивающего влево, радиус дуги поворота может быть выражен как
Начальный угол поворота и начальная точка .
Пусть — координаты автомобиля в данный момент; пусть координаты автомобиля в данный момент. Положение поворачивающего влево транспортного средства определяется начальным и конечным радиусом поворота, начальным и конечным положениями, скоростью, местоположением транспортного средства и углами поворота, которые рассчитываются как где – средняя скорость транспортных средств от момента до, которую можно рассчитать, извлекая данные траекторной модели. Траекторную модель можно использовать не только в одной полосе левого поворота, но и в нескольких полосах левого поворота.
4. Установка направляющих линий левого поворота на перекрестке
Основываясь на извлечении траекторий левого поворота и моделировании, мы можем узнать, что конфликты между транспортными средствами, как универсальное явление, существуют, если на перекрестке нет направляющих линий. пересечение. Поэтому следует принять некоторые меры пресечения. Также предлагается установить направляющие линии для нескольких полос левого поворота на перекрестке, которые можно было бы использовать для направления движения. В качестве примера возьмем перекресток с четырьмя полосами для левого поворота, показанный на рис. 6.
Направляющие линии левого поворота устанавливаются между въездным и выездным тротуарами внутри перекрестка, что в основном обусловлено двумя следующими соображениями. С одной стороны, конец направляющей линии заканчивается на выходе из левого поворота тротуара закрытого бета-тестирования, что может дать транспортным средствам с левым поворотом достаточную свободу в выборе дороги для выезда. Водитель может выбрать разумную дорогу, чтобы вовремя покинуть перекресток, в зависимости от условий движения и ситуации с пространством перед автомобилем. С другой стороны, предоставляя транспортным средствам, поворачивающим налево, свободу выбора полосы съезда для поворота, в то же время создается определенное ограничение на пути поворота налево в процессе поворота. Установка направляющей линии может уменьшить конфликты между транспортными средствами, поворачивающими налево, из-за случайной смены полосы движения во время поворота налево, и обеспечить быстрое и эффективное движение поворачивающих транспортных средств по направляющей линии объезда.
Транспортные средства левоповоротных полос проходят через стоп-линию и пешеходный переход на перекресток; из-за направляющего и связывающего эффекта передних направляющих поток транспортных средств, поворачивающих налево, обычно не будет выглядеть как рассредоточенное явление. Таким образом, начальную точку объезда можно расположить внутри пешеходного перехода. Когда какое-либо транспортное средство приближается к концу направляющей линии, водитель принимает решение о выборе подходящего пути в соответствии с местом назначения, целями условий вождения и рабочим состоянием целевой полосы перед транспортным средством. Объездная линия устроена таким образом, чтобы транспортные средства, поворачивающие налево, могли двигаться организованно и быстро в условиях ограничений, не теряя при этом гибкости и свободы.
Перекрёсток на рис. 6 имеет четыре полосы для левого поворота. Перед установкой направляющей линии и в процессе выпуска будут возникать конфликты между транспортными средствами, что повлияет на эффективность движения. После установки направляющих линий большинство транспортных средств будут следовать направляющим линиям, и количество конфликтов уменьшится.
После установки направляющих линий для левого поворота транспортные средства будут стремиться следовать направляющим линиям. Как с точки зрения обязательности правил, так и с точки зрения психологии, большинство водителей будут двигаться по маршруту направляющей линии и образуют очень аккуратную очередь на повороте. Явление транспортных средств, меняющих свой маршрут случайным образом, может быть значительно уменьшено, состояние транспортных средств, беспорядочно распределенных внутри перекрестка, также может быть улучшено, а конфликты между транспортными средствами, поворачивающими налево, будут уменьшены. Поток левоповоротного транспорта будет ускоряться в процессе движения от въезда на перекресток до выезда с него, что повысит эффективность движения поворачивающих транспортных средств.
5. Обсуждение экземпляра
Было проведено долгосрочное исследование перекрестка улиц Ятай и Наньху-роуд, на котором имеется четыре полосы для поворота налево в Чанчуне, Китай, как показано на рис. 7. Средняя задержка движения и скорость движения составляли напротив, между двумя состояниями смены полосы движения и без смены полосы движения. Здесь мы предположили, что состояние без смены полосы движения было таким же, как состояние установки направляющей линии. Результаты расчетов приведены в таблице 1.
Из Таблицы 1 видно, что задержка без смены полосы движения или установки направляющих линий меньше, чем без установки направляющих линий, а средняя скорость движения с установленными направляющими линиями выше, чем без установки направляющих линий. Таким образом, настройка направляющей линии может уменьшить задержку транспортных средств, поворачивающих налево, на перекрестке и повысить эффективность движения.
6. Заключение
В данной статье применяется метод видеообнаружения для извлечения и отслеживания в реальном времени траекторий поворота транспортных средств на перекрестке. Подробно анализируются характеристики распределения траекторий, изменяющиеся характеристики скорости и изменяющиеся характеристики потока. Установлена траекторная модель левоповоротных транспортных средств. С учетом характеристик поворота транспортных средств и модели траектории предлагается метод задания направляющих линий. В качестве примера показан перекресток с четырьмя полосами для левого поворота. Наконец, пересечение улиц Ятай и Наньху-роуд используется для проверки эффекта установки направляющих линий на перекрестке. Результат показывает, что при использовании направляющей линии взаимные помехи транспортных средств могут быть эффективно уменьшены. Таким образом, исследование обеспечивает теоретическую основу для распределения трафика на перекрестке и имеет хорошую перспективу применения.
Для дальнейших вопросов мы рассмотрим, как установить направляющую линию в других состояниях. Например, когда количество полос въезда с левым поворотом меньше, чем количество полос выезда, мы должны выбрать метод установки направляющей линии. А также изучим механизм конфликта между транспортными средствами на перекрестке.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа частично поддерживается Национальным фондом естественных наук Китая (№ 51278220, 61104168) и Китайским стипендиальным советом. Авторы благодарят анонимных рецензентов за ценный вклад и предложения.
Ссылки
W. Ma и X. Yang, «Координация левого движения группы регулируемых перекрестков», Journal of Tongji University: Natural Science Edition , vol. 36, нет. 11, стр. 1507–1511, 2008.
Просмотр:
Google Scholar
С. Кикучи, М. Кии и П. Чакроборти, «Длина двойных или двойных полос для левого поворота», Transportation Research Record , vol. 1881, стр. 72–78, 2004.
Посмотреть по адресу:
Google Scholar
К.
Шен, «Минимальные длины сливающихся участков для тройных полос левого поворота с сокращением полосы движения вниз по течению», ITE Journal , vol. . 71, нет. 3, стр. 40–45, 2001.Посмотреть по адресу:
Google Scholar
Д. Р. Эйлер, «Артериальный обмен», Отчет о транспортных исследованиях , том. 1912, стр. 65–71, 2005.
Просмотр по адресу:
Google Scholar
Дж. Ву, К. Сюэ, З. Чжао и Б. Лю, «Подход к траектории левоповоротных транспортных средств на перекресток на основе видеотехнологий», в Proceedings of the International Conference on Communication, Electronics and Automation Engineering , vol. 181 из Достижения в области интеллектуальных систем и вычислений , стр. 1–7, 2013.
Посмотреть по адресу:
Google Scholar
М.
Кайт, А. Абдель-Рахим, М. Диксон, Дж.-М. Ли и Д. Стронг, «Проверка метода накопления добавочной очереди для оценки задержки левого поворота», Transportation Research Record , vol. 2130, стр. 42–51, 2009 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Ци Ю. Г., Го Л., Ю Л. и Тэн Х., «Оценка проектной длины полос движения для левого поворота», стр. 9.0043 Журнал транспортного машиностроения , том. 138, нет. 3, стр. 274–283, 2012 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Яо, «Анализ чувствительности моделей оптимизации для двух соседних перекрестков с коррелированными короткими полосами для поворота налево», Transport , vol. 28, нет. 3, стр. 256–269, 2013.
Просмотр по адресу:
Google Scholar
Р.
Яо и Х. М. Чжан, «Оптимальное распределение полосы движения и зеленые полосы изолированных сигнальных перекрестков с короткими полосами для левого поворота, Журнал транспортного машиностроения , том. 139, нет. 7, стр. 667–677, 2013 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
P. Liu, C. Xu и W. Wang, «Идентификация факторов, влияющих на выбор водителями нетрадиционных полос движения за пределами левого поворота на сигнальных перекрестках», IET Intelligent Transport System , vol. 7, нет. 4, pp. 396–403, 2013.
Просмотр по адресу:
Google Scholar
Г. Мусса, Э. Радван и К. Хуссейн, «Система автомобиля с дополненной реальностью: исследование маневра влево», Transportation Research Part C: Emerging Technologies , vol. 21, нет. 1, стр. 1–16, 2012 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
WKM Alhajyaseen, M.
Asano, H. Nakamura, and DM Tan, «Стохастический подход к моделированию влияния геометрии перекрестка на повороты транспортных средств», Transportation Research C , vol. 32, стр. 179–192, 2013 г.Посмотреть по адресу:
Сайт издателя | Академия Google
Р. Ли, В. Ли и Ф. Цю, «Сигнал, устанавливающий критический объем для двустороннего перекрестка с регулируемой остановкой на основе значительной задержки левого поворота», Journal of Southeast University (Natural Science Edition) , vol. . 42, нет. 3, стр. 551–554, 2012 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Т. Сандо и Р. Мозес, «Влияние геометрии перекрестка на работу тройных полос для левого поворота», Journal of Transportation Engineering , vol. 135, нет. 5, стр. 253–259., 2009.
Посмотреть по адресу:
Сайт издателя | Google Scholar
W.
Wu, W. Ma, and X. Yang, «Интегрированный метод оптимизации фаз левого поворота соседних перекрестков», Journal of Tongji University , vol. 41, нет. 1, стр. 66–71, 2013 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
П. Ван, С. Л. Джонс, С. Гурупакиам и Л. Ван, «Новое моделирование на основе модели сотовой передачи блокировок левых поворотов внутри перекрестков», Протокол транспортных исследований , том. 2390, pp. 60–67, 2013.
Просмотр по адресу:
Google Scholar
С. А. Кунер, С. Э. Ранфт, Ю. К. Ратод и др., «Разработка рекомендаций для тройных левых и двойных правых полос», Проект выполнен в сотрудничестве с Министерством транспорта Техаса и Федеральной администрацией автомобильных дорог, 2011 г.
Посмотреть по адресу:
Google Scholar
Ю.
Би, Д. Ван и Х. Ци, «Модель прогнозирования времени прибытия автобуса». на регулируемом перекрестке с использованием данных GPS», Журнал транспортного машиностроения , том. 138, нет. 1, стр. 12–20, 2012 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Y. Bie, Z. Liu, D. Ma и D. Wang, «Калибровка параметра рассеивания взвода с учетом влияния количества полос», Journal of Transportation Engineering , vol. 139, нет. 2, стр. 200–207, 2013 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Y. Bie, D. Wang и X. Qu, «Моделирование степени корреляции между двумя соседними сигнальными перекрестками для динамического разделения подзон», Интеллектуальные транспортные системы ИЭТ , том. 7, нет. 1, стр. 28–35, 2013 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Copyright
Copyright © 2014 Fulu Wei et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Trajectory — Wiki — Scioly.org
Trajectory — Wiki — Scioly.orgИз Wiki — Scioly.org
Перейти к навигацииПерейти к поиску
- Эта статья о событии Траектория. Чтобы узнать о событии Воздушная траектория, см. Воздушная траектория.
Траектория — это мероприятие Дивизиона C сезона 2022 года, в котором участники должны создать устройство, способное запускать теннисный мяч, мяч для ракетки, мяч для пинг-понга или хакки-мешок, приводимое в действие неметаллическим упругое твердое тело. Устройство должно поместиться в куб 70 см на 70 см для дивизиона B и куб 60 см на 60 см для дивизиона C. В последний раз мероприятие проводилось для обоих дивизионов в 2014 году в качестве пробного мероприятия, а официально в обоих дивизионах — в 2009 году. и 2010. Мероприятие проводилось в обоих дивизионах как Trajectory Contest в 1984 году.
Содержание
- 1 конкурс
- 2 Совет
- 3 Устройство
- 3.1 Метод вытягивания
- 3.2 Метод проталкивания
- 3.3 Качели
- 4 Строительство
- 5 Эластичная сила
- 6 Проверка устройства
- 7 советов
- 8 файлов
- 9 звеньев
Соревнование
Зона запуска, в которой участники должны разместить свое устройство, представляет собой прямоугольник размером 1 м на 1,5 м. Они хотят, чтобы мяч попал в цель на уровне земли на расстоянии от 2 до 8 метров для категории B и от 2 до 8 метров для категории C.
Есть две цели на расстоянии не менее 2 метров друг от друга. Каждая мишень представляет собой либо квадрат 1 м на 1 м, либо круг диаметром 1 м. На региональном уровне мишени размещаются с интервалом в 1 метр. На государственном уровне мишени размещаются с интервалом в 1/2 метра. На национальном уровне мишени размещаются с интервалом 10 см. Вы должны сообщить судьям, в какую цель вы собираетесь поразить и когда вы собираетесь стрелять.
Ближняя цель находится на земле, а дальняя цель находится непосредственно над ближайшей целью на земле с возможным перемещением вправо или влево до 2 м (интервал 0,5 м для региональных, 0,25 м для штатов и 0,10 см для национальных) Цель состоит в том, чтобы поразить обе мишени и быть точным. При подсчете очков вы хотите получить наибольшее количество очков.
Также необходимо сдать четыре графика и таблицы по 100 баллов каждый. Ваша целевая оценка — это количество миллиметров от центра каждой мишени. Штрафы также налагаются за отсутствие защитных очков, нахождение в зоне запуска во время запуска, нахождение части устройства за пределами 70-сантиметрового (для B) или 60-сантиметрового куба (для C) до или после запуска, а также за нахождение устройства вне зоны запуска. область. В случае любого из них добавляется штраф в 100 очков».
Совет
Ключом к Trajectory является воображение. Простая катапульта с небольшой регулировкой ни к чему не приведет, лучше всего либо придумать что-нибудь самостоятельно, либо найти базовую конструкцию с большим количеством регулировок. Хорошая идея — взять трубку из ПВХ и просверлить прорези по бокам, а затем отверстия в верхней части. Проденьте металлический стержень через прорези, обвяжите его эластичным материалом и бросьте сверху теннисный мячик. Найдите что-нибудь, чтобы сидеть в одном из отверстий наверху, чтобы оно не запускалось. Когда вы вытащите спусковое устройство вверху, теннисный мячик вылетит наружу.
Устройство
Этап проектирования. Два возможных способа движения мяча к цели:
- Вы можете проталкивать шар по направляющей трубе или направляющей (что-то вроде пушки)
- Вы можете использовать качающуюся руку как катапульту.
Катапульта с поворотным рычагом использовалась победившей командой Trajectory на Nationals в 2008 году. Если вы наберете требушеты или катапульты в любой поисковой системе, вы найдете огромное количество информации о возможных конструкциях. Имейте в виду, что в соответствии с правилами вам придется модифицировать требушет, чтобы использовать в качестве источника энергии эластичное твердое тело (резиновую ленту, трубку или банджи-шнур). Кроме того, имейте в виду, что большинство требушетов и катапульт изначально были спроектированы так, чтобы иметь максимально возможную мощность и/или дальность полета. В этом соревновании дальность не должна быть проблемой (поскольку легко получить достаточную мощность в 80-сантиметровом кубическом устройстве), но проблема будет заключаться в точности. Поэтому посмотрите на конструкции, которые вы видите, и, возможно, исключите детали или конструктивные особенности, предназначенные исключительно для увеличения мощности или диапазона, в пользу конструктивных особенностей, обеспечивающих точность (постоянство) и регулируемость. У вас должен быть способ настроить устройство на любую возможную дальность и высоту цели в рамках правил, и вам нужны какие-то средства для внесения небольших поправок между выстрелами.
Метод вытягивания
Метод качающейся руки можно адаптировать разными способами. Любой метод может быть в высшей степени неточным и невероятно запутанным, если он плохо спроектирован и сконструирован (это означает, что при тестировании у вас слишком много переменных, и вы потеряете способность предсказуемо настраивать устройство. Чрезвычайно важно создать устройство, которое является прочным и стабильным, чтобы при повторном выстреле с одной и той же настройкой оно стреляло на одинаковое расстояние.Кроме того, вам нужна система регулировки, которая позволяет регулировать мощность (и, возможно, угол запуска), чтобы вы могли точно настроить свое устройство чтобы поразить любую потенциальную цель (см. выше) ТАКЖЕ, даже если у вас есть лучшая машина в мире, вам нужна система прицеливания, которая поможет вам выровнять ваше устройство по цели.Любая система, которая позволяет вам наводить устройство в предельном точность устройства может работать.Некоторые примеры устройств наведения: регулируемый штифт/гвоздь на каждом конце устройства, который выровнен с целью, когда устройство правильно наведено, так что оно поразит цель, Любое система прицеливания винтовки, включающая оптические прицелы, механические прицелы и «законные» лазеры (см. правила SO для лазеров), даже простая трубка небольшого диаметра, совмещенная с целью, может стать адекватным прицельным приспособлением для траекторного устройства. Во время калибровки вам понадобится точное метрическое устройство для измерения расстояния. Простая метрическая лента вполне подойдет, но можно использовать и английскую (фут/дюймовую) ленту, если вы не возражаете преобразовать единицы измерения в метры. Вы также можете использовать лазерный дальномер для измерения расстояния, так как цена на них сейчас намного меньше 100 долларов!
Метод извлечения показан в различных конфигурациях ниже.
Метод проталкивания
Ради справедливости я дам вам представление о том, как сделать хорошее устройство с проталкиванием.
Основная концепция метода толчка заключается в том, чтобы закрепить резинку в двух параллельных точках перед стартом снаряда, а затем поместить резинку позади снаряда, чтобы он «подталкивал» его к цели. Один из способов сделать этот процесс более точным — использовать трубку и взять кусок дерева или меньшую трубку из ПВХ, чтобы подтолкнуть мяч к цели.
Качели
Качели могут быть хорошей конструкцией, но при неправильном подходе могут привести к неудаче. Вы должны помнить о простом и надежном способе настройки вашего устройства, чтобы его можно было исправить. Таким образом, вы можете быть точны на обоих выстрелах. Подумайте о вещах, которые можно постоянно корректировать на известную величину и которые достаточно просты, чтобы вы не ошиблись при настройке диапазона или прицеливания. Подобные вещи могут быть удлиненными стимуляторами, которые соответствуют линейке или чему-то, на что можно установить ваше устройство. Другие идеи включают в себя компасы, линейки, лазеры, зубчатые передачи или другие устройства, которые можно использовать для установки пусковых рычагов на место, а затем их можно отпустить в этой точке и т. д.
Конструкция
Хорошая прочная конструкция из дерева, металла или пластмассы, предпочтительно очень прочная, с клеевыми и винтовыми соединениями и прочными распорками, чтобы основание не двигалось во время запуска. Если ваше устройство недостаточно тяжелое, чтобы не двигаться во время запуска, не забудьте оставить место, где вы можете положить кирпичи или 5-галлонное ведро с песком или два, чтобы удержать его (устройство может скользить вперед, поэтому вам может понадобиться поставить резиновые прокладки или какой-либо другой материал с высоким коэффициентом трения на дне).
Elastic Power
Помните, что ваше устройство должно питаться от неметаллического упругого твердого тела. Это означает, что энергия, используемая для перемещения снаряда к цели, должна исходить от эластичных материалов, таких как: резиновые трубки, эластичные шнуры, резиновые ленты, удочки, хирургическая резина и эластичный материал. Однако и древесина, и струна считаются неметаллическими упругими твердыми телами. Если вы используете веревку, вы можете использовать силу кручения (хотя это лучше работает с резиновыми лентами или банджи-шнурами без крючков. Дерево можно использовать так, как показано на ссылке ниже:
http://gallery. scioly.org/details.php?image_id=1026
Проверка вашего устройства
Протестируйте свое устройство, чтобы убедиться, что оно работает так, как указано в параметрах. Затем протестируйте его при разных температурах, различной влажности и т. д., поскольку на устройство могут влиять все или любой из этих факторов. Проведите основное тестирование в условиях, максимально приближенных к условиям, ожидаемым на соревнованиях. На некоторых региональных и государственных соревнованиях вам, возможно, придется учитывать широкий диапазон температур и даже скорости ветра, если соревнование проводится на открытом воздухе, но национальные соревнования всегда проводятся в помещении в контролируемой среде. Убедитесь, что вы находитесь на ровной поверхности и точны.
Постоянство и надежность — самые важные характеристики, к которым следует стремиться. Идеальное устройство должно быть в точке, где оно каждый раз попадает в цель. Устройство, которое попадает в цель 1 раз из 3, вряд ли превзойдет устройство, которое может поразить цель 9 раз из 10. Также важно, чтобы устройство было достаточно прочным, чтобы после калибровки ничего не сломалось. сломать или переместить (или вам, вероятно, придется полностью перекалибровать ваше устройство).
Советы
- Убедитесь, что вы используете то, что не будет сильно растягиваться со временем. Или, если вы должны использовать что-то, что будет меняться со временем, убедитесь, что у вас есть несколько наборов для использования, и чередуйте их, чтобы они были одинаковыми. Если вы хотите узнать больше о характеристиках устройств с резиновым питанием, посмотрите на некоторую информацию о Wright Stuff. При предельном растяжении резина будет иметь короткий срок службы, но при хорошем уходе она может быть достаточно прочной и долговечной. Наклеивание изоленты на область, где резина больше всего растягивается, — хороший способ замедлить срок службы резины.
- Не забудьте положить мяч (или что-то, что вы запускаете) перед запуском. Иногда можно легко забыть перезарядить его.