Принцип работы роботизированной коробки передач: 6 правил, о которых мало кто знает :: Autonews
Принцип работы роботизированной коробки передач
Для знакомства с роботизированной КПП необходимо вспомнить основы устройства обычной механической коробки передач. Главной составляющей МКПП являются 2 вала — первичный, на который и передается крутящий момент силовой установки, и вторичный, с которого преобразованный момент перераспределяется на колеса. На оба вала насажены шестерни, попарно находящиеся в зацеплении. Шестерни первичного вала закреплены на нем жестко, а на вторичном они свободно вращаются. В нейтральном положении ручки КПП все вторичные шестерни прокручиваются на валу свободно и крутящий момент на ведущую ось не поступает. При переключении передач выжатым сцеплением отсоединяется от зацепа с двигателем первичный вал, а переводом рычага КПП на вторичном валу перемещаются синхронизаторы. При подведении муфта синхронизатора жестко блокирует на валу вторичную шестерню нужной передачи. После снятия ноги с педали сцепления крутящий момент с заданным коэффициентом передается на вторичный вал, а далее и на главную передачу и колеса.
Принцип действия роботизированных коробок передач совпадает с принципом работы «механики». Только действия по смыканию/размыканию сцепления и выборому передач в данном типе коробок выполняют актуаторы. В большинстве случаев это шаговый электромотор с редуктором и исполнительным механизмом. Управляет актуаторами электронный блок.
В автоматическом режиме команда на переключение передачи поступает от бортового компьютера, учитывающего скорость движения, обороты двигателя, данные ESP, ABS и других вспомогательных систем. А в ручном — от водитель при переключении селектора КПП или лепестков, расположеных под рулем.
Основная проблема роботизированных КПП — отсутствие обратной связи по сцеплению. Человек чувствует диски смыкаются и может контролировать скорость и плавность переключения. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колесам во время переключения.
Инновацией в автомобилестроение стала появившаяся в начале 1980 годов трансмиссия с 2 сцеплениями DCT — dual clutch transmission. К их числу можно отнести 6-ступенчатую коробку DSG концерна Volkswagen. У немецкого варианта 2 вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у 6-ступенчатой МКПП, устанавливаемой на Golf. Фокус в том, что первичных валов тоже два и они вставлены додин в другой по принципу матрешки и соединены с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни 2, 4 и 6 передач, на внутреннем — 1, 3, 5 и заднего хода. Электроника автоматически готовит следующую передачу и при необходимости моментально ее включает, одновременно с этим подготавливая следующую передачу на другом валу.
Смена передач происходит с минимальным по времени разрывом потока мощности и с невероятной скоростью. Серийная коробка Volkswagen Golf переключается за 8 мс, а для сравнения, на Ferrari Enzo — 150 мс!
Коробки с двойным сцеплением расходуют меньше топлива и быстрее меняют скорости по сравнению с традиционными механическими, при этом более комфортны, чем АКПП. К основным недостаткам можно отнести высокую цену. Другая проблема — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока на большинство суперкаров устанавливаются «роботы».
Сегодня коробки DCT разработаны компаниями BMW, Ford, Mitsubishi и FIAT. Данный тип признали даже конструкторы Porsche, которые применяют в своих моделях исключительно проверенные технологии. Эксперты считают, что в скором времени самыми распространенными трансмиссиями будут «роботы» DCT и вариаторы.
Описание принципов работы роботизированной КПП DCT Хендай
Рассмотрим DCT автомобилей Hyundai: принцип работы, характерные особенности, плюсы и минусы.
Роботизированная трансмиссия — новшество из мира спортивных автокаров
Роботизированная КП (DCT Хендай) — преселиктивная коробка передач, попавшая на любительский рынок в модифицированном виде относительно недавно из автоспорта, оснащенная прямым включением и двумя сцеплениями, на которые возложены разные функции:
- Контроль над нечетными передачами.
- Контроль над четными передачами.
Сравнительно быстрый и, что немаловажно, плавный разгон, в процессе которого скорости переключаются в доли секунды — главные особенности роботизированной трансмиссии автомобиля Hyundai. Кроме этого, сочетание комфортного управления транспортным средством, которое дает автомат, с неоспоримым экономичным режимом и динамикой от МКП — так же отличительная характеристика роботизированной КП, относящиеся к достоинствам этой трансмиссии.
К преимуществам так же можно отнести следующее:
- дешевле автоматической КП;
- небольшая масса робота;
- некоторые модели Hyundai оснащены подрулевыми лепестками — альтернатива традиционному рычагу переключения скоростей, что позволяет быстро поставить необходимую передачу, а значит предать динамичности транспортному средству.
Корейские кроссоверы премиум класса — например, Hyundai Tucson (2016 года), при желании автолюбителя могут комплектоваться 7-ступенчатой роботизированной коробкой с двойным сцеплением и подрулевыми лепестками (несмотря на название, они расположены сразу за рулем). Данная система КПП идет исключительно с силовой установкой мощностью в 175 лошадиных сил.
Категорически противопоказаны пробуксовки, страдает плавность переключения скоростей, при даже кратковременной остановке необходимо переходить в нейтральное положение. Это очевидные недостатки роботизированной коробки. К ним же следует присовокупить дороговизну устройства, как при приобретении, так и в последующем обслуживании и ремонте.
Идеальной коробки передач не существует. Поэтому, выбирая, необходимо расставлять приоритеты. То есть, что предпочтительней: динамика, стоимость, экономичность или комфорт. Определившись, проще осуществить правильный выбор относительно трансмиссии.
Поэтому, выбирая, необходимо расставлять приоритеты. То есть, что предпочтительней: динамика, стоимость, экономичность или комфорт. Определившись, проще осуществить правильный выбор относительно трансмиссии.
Принцип работы роботизированной коробки передач
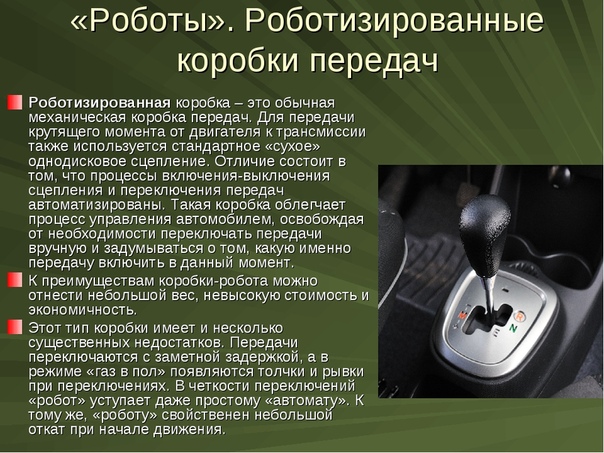
Вместо традиционной механической коробки передач конструкторы всё чаще используют более современные и технологичные варианты. РКПП — это роботизированная коробка передач, которая выполняет аналогичные задачи, но имеет несколько иное устройство и принцип работы, чем у МКПП.
Для начала необходимо отметить, что автомобили с роботизированной коробкой оснащаются только двумя педалями. Вместо третьей педали используется целый арсенал датчиков, акуаторов и специальных сенсоров, контролируемых бортовым компьютером. Электронная система анализирует стиль вождения, нагрузку, скорость и характер дороги, на основе чего прогнозируются дальнейшие действия. Также проводится синхронизация работы отдельных деталей коробки и двигателя автомобиля, что позволяет быстро и вовремя переключать скорости.
Конструкция МКПП
Конструкция обычной МКПП
В основе конструкции традиционной механической коробки передач лежат два вала: ведущий и ведомый. Двигатель выполняет определённую работу и создаёт крутящий момент, который передаётся с помощью сцепления на ведущий (первичный) вал. Ведомый (вторичный) вал уже непосредственно связан с колёсной парой, благодаря чему автомобиль приходит в движение. Первичный и вторичный валы связаны с собой специальными шестернями. Коробка передач определяет, как именно они взаимодействуют между собой. В нейтральном положении шестерни на ведомом валу вращаются свободно, то есть крутящий момент не передаётся на колёса.
Когда необходимо привести автомобиль в движение, водитель зажимает сцепление и включает передачу. Рычаг коробки отсоединяет шестерни первичного вала от двигателя и смещает синхронизаторы вторичного вала, в результате чего блокируется шестерня нужной передачи на ведомом валу.
РКПП имеет очень много общего с механической коробкой, и принцип работы роботизированной коробки передач во многом схож с «механикой». Но главное отличие, как было сказано выше, заключается в том, что некоторые функции, такие как активация сцепления, коробка-робот выполняет автоматически.
История и причины появления
Европейские автомобильные компании поставили перед собой задачу улучшить характеристики автомобиля и его управляемость. Так как современные условия вождения достаточно существенно отличаются от тех, которые были во времена появления МКПП, необходимо создавать новые конструкции. В первую очередь учитываются загруженные городские дороги, где поток автомобилей движется неравномерно. Постоянные старты и остановки, и сопутствующее переключение передач сильно утомляют и снижают внимание. Именно поэтому была придумана коробка-робот, которая представляет собой нечто среднее между «механикой» и «автоматом», совмещая лучшие качества той и другой коробки. Первопроходцами в этом были спортивные автомобили, а РКПП фактически «тестировались» на гоночных трассах.
Особенности РКПП
Схема работы РКПП
Принцип работы РКПП по сути ничем не отличается от принципа работы МКПП. Также она имеют аналогичную конструкцию, за исключением наличия в «роботе» специальных сервоприводов, которые называют акуаторами. Именно они позволяют автоматизировать многие процессы, в частности смыкание сцепления и непосредственный выбор конкретной передачи.
Акуатор представляет собой электрический мотор с исполнительным механизмом и редуктором. В некоторых моделях автомобилей применяются гидравлические акуаторы. Контролирует работу данных механизмов электроника.
-
Поступает команда и сервопривод замыкает сцепление;
-
Перемещаются синхронизаторы, выбирая нужную скорость;
-
Сразу же в автоматическом режиме плавно размыкается сцепление;
-
Крутящий момент с нужным коэффициентом начинает передаваться на колёса.

Иными словами больше нет никакой необходимости иметь педаль в салоне, так как электроника автоматизирует основные шаги.
Важным элементом является компьютер, так как он анализирует скорость движения, данные, полученные с различных датчиков и сенсоров, и прочее, на основе чего выбирает нужную передачу.
Марки автомобилей с РКПП и названиями коробок
Плюсы и минусы РКПП
Плюсы коробки-робота:
-
Бюджетный вариант «автомата»;
-
Сохранены многие достоинства «механики»;
-
Требуют меньше усилий;
-
Высокий процент передачи КПД в крутящем моменте.
Простая конструкция не требовательна в обслуживании, но при этом отличается неплохими эксплуатационными характеристиками.
Из минусов можно отметить то, что РКПП больше подходят для автомобилей с мощными двигателями — изначально данные коробки проектировались для гоночных болидов. Из-за нехватки мощности коробка работает в более широком диапазоне и чаще переключает скорости, что снижает ресурс трансмиссии.
Видео
РКПП посвящен следующий видеоматериал:
Роботизированная коробка Тойота: принцип работы коробки Toyota
За основу трансмиссии Freetronic была взята традиционная «механика» оснащенная электроприводами. Другое известное название «робота» Freetronic — ММТ (Multimode). Роботизированная трансмиссия может работать как в режиме «автомат», так и в ручном режиме.
Переключение передач в трансмиссии происходит при помощи трех электродвигателей. Один из них отвечает за выключение (выжим) сцепления, а два других за смену передач. Работой приводов управляет электронный блок управления (ТСМ), путем обработки сигналов с бесконтактных датчиков.
Трансмиссией Freetronic комплектовались автомобили марки Toyota с 2005 по 2009 гг. Это такие модели как: Corolla, Auris, Yaris, Aygo,Echo, Prius и другие. На моделях Yaris и Echo концерн Тойота впервые стал устанавливать автоматическое сцепление TFT.
Это такие модели как: Corolla, Auris, Yaris, Aygo,Echo, Prius и другие. На моделях Yaris и Echo концерн Тойота впервые стал устанавливать автоматическое сцепление TFT.
Общее устройство
1 — индикатор в автомобиле, 2 — концевой выключатель рычага КПП, 3 — привод, 4 — датчик 1-2, 5 — датчик заднего хода, 6 — датчик нейтрали, 7 — датчик частоты вращения (КПП), 8 — датчик положения сцепления, 9 — электронный блок управления MMT — Фритроник.
Выключение и включение сцепления TFT в трансмиссии Freetronic происходит путем управления величиной давления жидкости, которая подводится к главному цилиндру сцепления. Коробка переключения передач оснащена датчиками, одни из которых следят за реальным положением селектора передач, а другие измеряют частоту вращения первичного вала КПП. Рычаг переключения оснащен концевыми выключателями упреждающими блок управления о намерениях водителя задействовать рычаг коробки переключения передач. При наличии неисправностей на панели приборов начинает мигать индикатор. Индикатор также сигнализирует водителю при его попытке неверного переключения.
Принцип работы роботизированной коробки Toyota
- До запуска двигателя сцепления всегда включено
- Пуск. После поворота ключа в положение зажигание (положение КПП – нейтраль) блок ММТ выполняет «выжим» сцепления и можно запускать двигатель
-
Начало движения. При включении первой передачи или передачи заднего хода и нажатии педали газа, блок ММТ мгновенно получает информацию об этом путем сигнала от датчиков и выдает команду золотниковому клапану на понижение давления, что ведет к включению сцепления и автомобиль трогается. Для плавного включения сцепления клапан золотника открывается постепенно, и полное его включение происходит после выравнивания частоты вращения коленвала и первичного вала КПП. Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
 Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.- Смена передач. При отпускании педали газа и изменении положения рычага КПП, соответствующие датчики сообщают об этом в блок ММТ. Блок дает команду на «выжим» сцепления. Дальнейшее включение сцепления происходит после получения сигналов от датчиков нейтрали и «концевиков» рычага.
- Остановка. В момент торможения автомобиля входной вал КПП начинает вращаться с меньшим числом оборотов (ниже заданной нормы) и блок управления TFT выполняет «выжим» сцепления.
- Зуммер. Включается при возникновении внештатных ситуаций: ошибка при переключении вниз, попытка начала движения с передачи выше 3-й, чрезмерная нагрузка на сцепление, попытка запуска при включенной передаче, открыта дверь водителя при запущенном двигателе и положении рычага селектора соответствующее движению вперед или назад ( не нейтраль).
принцип работы, устройство, отличия от АКПП, плюсы и минусы
Инженеры, работающие в сфере автомобилестроения, постоянно придумывают что-то новое. Инновационные решения помогают производителям выдерживать конкуренцию. Коробка передач — это самый важный элемент в автомобиле. На нее в первую очередь обращают внимания автолюбители. В списке трансмиссий не так давно появился новый вид КП — роботизированная коробка передач. Рассмотрим, как работает коробка робот, какие плюсы и минусы имеет, и чем отличается от других КП.
РКПП — что это?
Роботизированная коробка передач — это агрегат, схожий по своей конструкции с механической коробкой. При этом переключение передач происходит в автоматическом режиме. Почему коробка ассоциируется со словом «робот»? Дело в том, что КП управляет электронное устройство. Входные данные задаются водителем и дорогой. Иными словами, принцип работы роботизированной коробки передач вобрал в себя свойства и механики, и автомата.
Крупные концерны начали производить машины с коробкой «робот» в середине 2000-х годов. По своему внешнему виду РКПП выглядит почти так же как АКПП. В автомобиле отсутствует рычаг переключения передач и педаль сцепления. Агрегатом управлять довольно удобно. По сравнению с автоматикой, он имеет меньшую стоимость. Это не может не радовать и производителей, и покупателей.
Сегодня роботизированная коробка встречается на грузовых авто, в «легковушках» и даже в автобусах. У каждого производителя имеются свои разработки в этой области. В целом «роботы» являются перспективными, поэтому автоконцерны из года в год стараются усовершенствовать их.
Особенности
Роботизированная трансмиссия, если внимательнее ее изучить, выглядит как механическая КП с автоматизированным переключением передач. Эксперты утверждают, что агрегаты через пару десятков лет будут самыми популярными среди остальных коробок.
Приводы переключения скоростей обладают поршневой системой или имеют электромоторчики. Независимо от устройства, они играют одинаковую роль — выжимают сцепление и перемещают синхронизаторы шестеренок.
Гидравлическая система функционирует быстрее, но ее производство обходится дороже. Именно поэтому такой агрегат устанавливают на авто премиум-сегмента. Электронный блок совмещают с блоком ДВС, либо делают его отдельным. Первый тип более целесообразен.
Устройство
Роботизированная трансмиссия состоит из множества деталей. К ним относят узлы актуаторы, рабочий элемент и блок управления. Рассмотрим устройство роботизированной коробки передач по каждому из перечисленных элементов.
Рабочий узел состоит из 4-х валов (2 первичных и 2 вторичных). Они оснащены шестеренками переключения передач. Первая пара валов отвечает за четные передачи, а вторая — за нечетные и задний ход. При этом каждая пара обладает своим сцеплением.
Узлы актуаторы функционируют либо на гидравлике, либо на электрике. Гидравлический вид — это гидроцилиндр, который управляется клапанами электромагнитного типа. Электрический вид, в свою очередь, представляет собой двигатель с редуктором.
Электрический вид, в свою очередь, представляет собой двигатель с редуктором.
Блок управления представлен в виде микропроцессора. С его помощью осуществляется контроль за работой всей РКПП. Внешние датчики передают данные о скорости, количестве оборотов «движка» и давлении масла. ЭБУ соединен с коробкой бортовым компьютером.
Принцип работы
Принцип работы роботизированной коробки происходит 2-мя способами. Автоматический способ управления осуществляется с помощью специального алгоритма. Она задается ЭБУ, основываясь на сигналах датчика.
Что касается полуавтоматического способа, то здесь принцип работы аналогичен переключению передач вручную. Переключение передач (от высшей до низшей и обратно) возникает с помощью рычага селектора.
Режимы работы
Чтобы понять, как работает роботизированная коробка, водителю нужно научиться ею управлять. Выбор режима осуществляется селектором.
Режимы работы РКПП следующие:
N — нейтральный. Режим включается после остановки, перед началом езды и при долгой стоянке.
D — движение вперед. Иногда этот режим обозначают как А/М или Е/М. Машина движется вперед на режиме «драйв», при этом скорости переключаются автоматически.
М — управление ручное. Машина двигается вперед, но водитель переключает скорости вручную, нажимая селектор или подрулевые лепестки.
R — задний ход. Автомобиль движется назад.
Многие водители знают, что существуют такие режимы как «спортивный» и «зимний». Но не на всех РКПП они присутствуют.
Самые удачные роботизированные коробки
Новые технологии постоянно развиваются. Коробки «робот» имеют на рынке большой спрос. Почему так происходит? Дело в том, что некоторым водителям совершенно не нравится автомат. Они чувствуют запоздание скоростей, что не дает насладиться мощью авто в полной мере.
Именно поэтому многие производители стараются совершенствовать АКПП и МКПП. В результате их работы появилась роботизированная коробка. Приведем список самых удачных КП, выпущенных разными концернами.
Приведем список самых удачных КП, выпущенных разными концернами.
DSG
Разработки компании Volkswagen всегда считались инновационными. Сегодня под брендом производятся две коробки, имеющие 6 и 7 ступени переключателя. Первая модель считается более технологичной, чем вторая. Ее устанавливают на премиальные машины.
К преимуществам коробки относят экономичность. Во время переключения передач не возникает посторонних шумов. Дизельный и бензиновый агрегат работают одинаково хорошо. Единственным недостатком DSG считается технологическая сложность. Для обслуживания коробки водителю придется посещать специальные станции. Других недостатков у коробки нет.
Multimode
Коробка Multimode была создана компанией Тойота. Она обладает двумя сцеплениями, поэтому функционирует лучше, чем механика и автомат. Основными преимуществами является экономичность, комфорт и простота.
Данная модель коробки считается универсальной. Она применяется с разными типами двигателя. Однако у РКПП есть ограничения — она несовместима с внедорожниками. Под каждый двигатель настраиваются индивидуальные настройки.
Японский производитель грамотно «настроил» свою продукцию. При любых настройках двигатель работает слаженно и без частых поломок.
Easytronic
Роботизированные технологии впервые начал использовать Опель. Компания выпустила коробки Easytronic. Разработчики считали, что новинка заменит собой автоматические коробки, которыми оснащены автомобили, продаваемые в Европейских странах. Но этого не произошло. Разработанные агрегаты сегодня устанавливаются лишь на Corsa.
Существует ряд нюансов, которые не позволяют ставить РКПП на остальные машины. Во-первых, их технология очень похожа на МКПП. Во-вторых, переключение скоростей возникает резко. В-третьих, отсутствует интеллектуальная система. Таким образом, «робот» не дает водителю ехать так, как хочется.
Преимущества
Разобравшись, как работает роботизированная коробка передач, водители понимают, что это действительно инновационное решение. Например, компания VAG внедряет такие КП на автомобили марок Шкода, Ауди, Порше и т.д. Роботизированной системой также оснащают некоторые модели Форд и Хонды.
Например, компания VAG внедряет такие КП на автомобили марок Шкода, Ауди, Порше и т.д. Роботизированной системой также оснащают некоторые модели Форд и Хонды.
По сравнению с другими коробками, роботы имеют следующие плюсы:
Долговечность — обуславливается наличием уже проверенной конструкцией МКПП.
Небольшой расход масла — обеспечивается благодаря малыми габаритами трансмиссии.
Улучшенная динамика — возникает по той же причине, что и небольшой расход рабочей жидкости.
Показатели сцепления показывают лучшую эффективность.
Цена робота ниже, чем у автоматических коробок.
Автомобиль, оснащенный РКПП, по стоимости будет ниже, чем тот, что оснащен автоматом. Кроме этого, во всех вариациях роботизированного агрегата присутствует функция самостоятельного переключения передач.
Недостатки
Производители считают, что РКПП в скором времени заменят другие виды коробок. Но это произойдет еще через пару тройку десятков лет, поскольку роботы до сих пор имеют существенные недостатки.
АКПП робот принцип работы не такой плавный, как у автоматики. Во время движения машина «дергается», создавая водителю дискомфорт. Переключения передач также слегка затянуты.
Ресурс актуаторов и сцепления довольно низкий. Стоимость актуаторов высокая, а ремонтопригодность — сомнительная. В случае поломки придется менять актуатор на новый, а не чинить сломанный. При этом не каждая СТО возьмет на себя ответственность проводить ремонтные работы.
Что касается стоимости, то машины с коробкой-роботом на гидравлике стоят столько же, сколько авто с автоматической КП. Цены также приближены к обслуживанию.
Особенности езды на РКПП
Езда в автоматическом режиме подразумевает собой ровные дороги. Если человек заедет на размытую дождем местность или в глубокий снег, то у него есть риск забуксовать. Алгоритм начнет демонстрировать ошибочные команды, передачи перестанут корректно переключаться. Это все увеличивает риск поломок.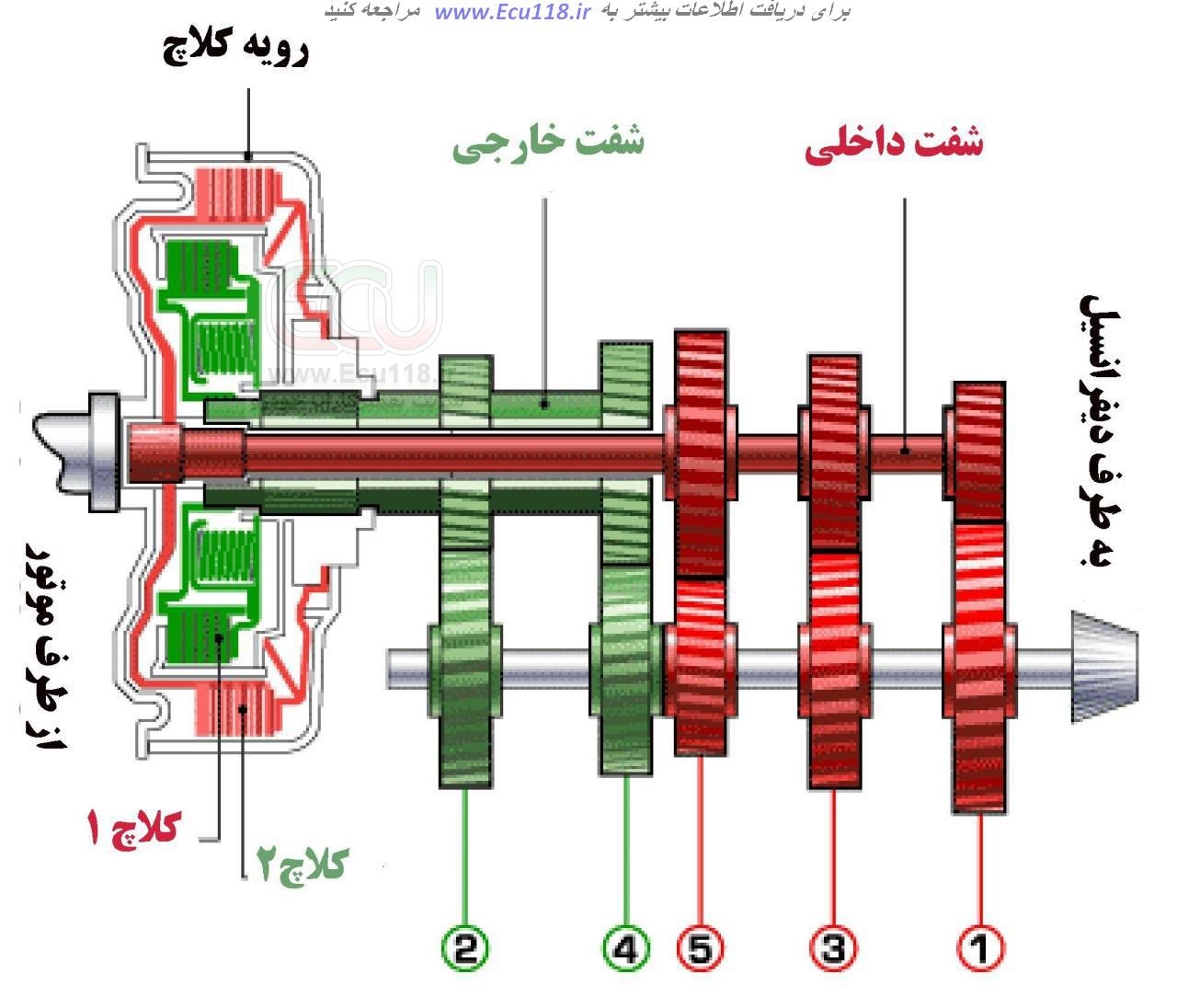
Нельзя давить педаль газа резко и до упора. Нужно плавно нажимать на нее, а также внимательно следить за работой двигателя, избегая перегазовки. Во время стоянки на светофоре или на парковке водителю необходимо устанавливать рычаг в положение «нейтралка». Автоинструктор в Москве поможет вам освоить азы вождения на автомобиле с роботизированной коробкой передач и почувствовать себя уверенно на дорогах большого города.
Каждые 10-15 тыс. км стоит производить перекалибровку блока управления. Этот показатель обычно предоставляется производителем. Операцию проводят из-за износа диска сцепления.
Признаки неисправности
Поломки роботизированной коробки подразделяются на механические и электронные. Первые возникают в процессе эксплуатации, а вторые — при сбоях в электронике.
Внешние «симптомы» неисправностей:
Горение лампы сигнализации.
Возникновение шумов во время езды.
Утечка жидкости из коробки.
Рывки при переключении передач.
Буксует сцепление.
Электронные поломки встречаются чаще, чем механические. К последним относят изношенность вилки выбора передач, а также гул подшипников качения. Ремонт электроники заключается в перепрошивке ПО или в замене всего устройства.
Актуальность в РФ
В России транспорт с коробками-роботами у людей на хорошем счету. Согласно статистике, более 20% жителей приобрели бы себе такой автомобиль. Однако желающих пользоваться «автоматом» вдвое выше.
Люди, живущие в мегаполисах, выбирают АКПП из-за возможности чувствовать себя комфортно в пробках. Если стоимость бензина продолжит расти, то эта категория людей заменят машины на те, что имеют РКПП. Особенно это актуально для тех, кто пользуется транспортом не только для езды от дома на работу. Для длительных поездок и путешествий РКПП будет выгодна.
Преселективная роботизированная коробка передач DSG в автомобилях Volkswagen
Специалисты компании Volkswagen создали новую, уникальную коробку переключения скоростей DSG (Direct Shift Gearbox), которая по своим техническим характеристикам намного превосходит существующие образцы.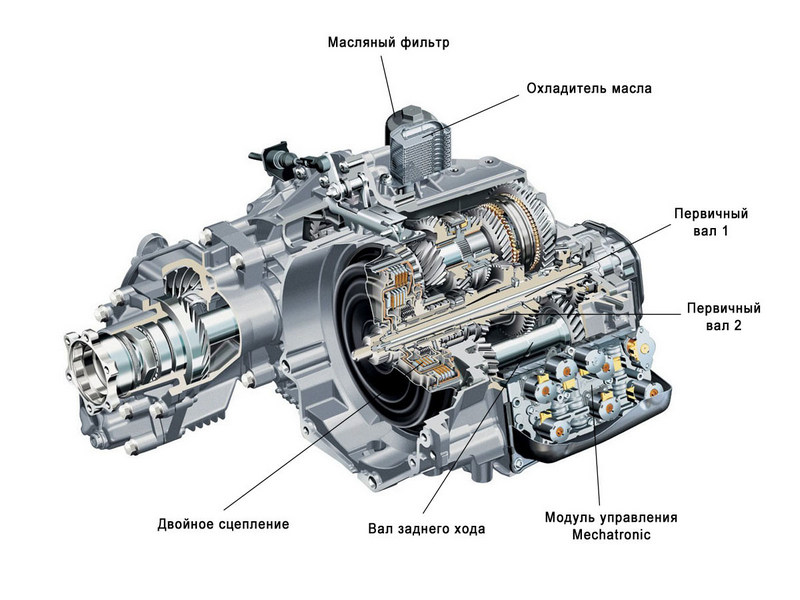
В настоящее время преселективные роботизированные коробки передач DSG второго поколения устанавливаются на большинство моделей Volkswagen: Golf, Passat B8,Passat СС, Tiguan, Jetta.
Использование этой коробки передач позволяет почувствовать комфорт и удобство при переключении. Данная коробка сочетает в себе все современные технологии трансмиссий различных типов. Переключение скоростей осуществляется вручную, но за весь процесс отвечает электроника и различные автоматизированные механизмы.
Отличительной особенностью работы коробки является то, что во время переключения передач не изменяется поток мощности. Плавность работы такого агрегата по достоинству оценят как любители загородной быстрой езды, так и владельцы автомобилей, передвигающиеся преимущественно в городской черте.
Особенности работы коробки-робота
Коробка передач DSG может эксплуатироваться в двух режимах — спортивном и нормальном.
Спортивный режим. Данный режим предусматривает более длительное раскручивание при переходе на повышенные скорости и быстрый переход на пониженные передачи. Такой режим является предпочтительным при скоростной езде. Имеется функция Tiptronik, которая позволяет производить управление передачами в ручном режиме.
Всем, кто любит спортивный тип езды, можно использовать переключатели-лепестки, смонтированные на руле. Такие лепестки позволяют почувствовать мощь автомобиля и от души насладиться спортивной ездой.
Нормальный режим. Такой режим является привычным для всех автомобилистов и может использоваться при передвижении по городу или для небыстрого, экономного вождения.
Устройство DSG
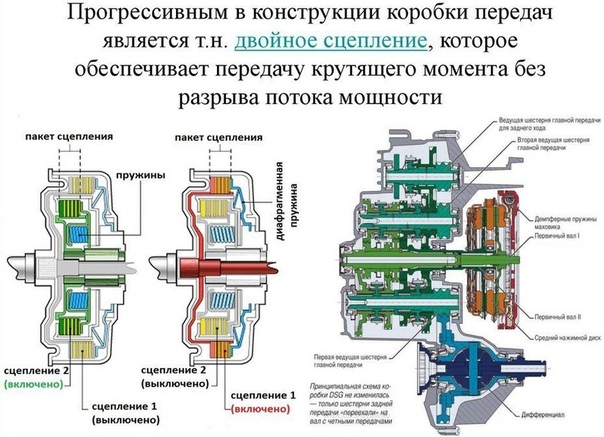
6-ступенчатая коробка DSG имеет два, независимых друг от друга блока трансмиссий. Благодаря такой конструкции, происходит поочередное сцепление с двигателем, в зависимости от включенной в данный момент передачи. Для управления используется двойное сцепление, которое состоит из пары муфт, которые установлены в едином корпусе.
Одно сцепление отвечает за работу 1, 3, 5 передачи, второе за 2, 4, 6 передачу. Каждый блок оснащен отдельным приводным валом, передающий вращающее действие на колеса. Передача осуществляется с помощью дифференциала.
КПД роботизированных коробок передач
Применение схемы двойного сцепления в коробках DSG, при сравнении с АКП, имеющей гидротрансформатор, позволяет в значительной мере увеличить КПД. Интеллектуальная система коробки в сочетании с небольшой массой, позволяет значительно понизить расход топлива. Оценить все положительные качества данной коробки можно на автомобилях Passat CC, Golf GTI, Passat Variant.
Интеллектуальный блок управления
Коробка снабжена встроенным блоком, который проводит анализ оборотов двигателя, скорости движения, нажим на педаль газа.
На основе полученных данных автоматически выбирается необходимая передача или момент перехода на другую передачу. Это обеспечивает плавность движения и снижает нагрузку на двигатель.
Роботизированная коробка передач. Принцип работы и устройство
Однако, вместо третьей педали, которую нужно выжать для переключения скоростей в автомобиле с механической коробкой передач, в автомобиле с роботизированной коробкой передач всего две педали. А роль третьей педали играет целая система сенсоров, передатчиков и актуаторов, которые при помощи бортового компьютера переключают коробку скоростей. Именно компьютер синхронизирует работу деталей коробки, а некоторые электронные системы способны научиться распознавать стиль вождения водителя и предугадывать его действия.
Роботизированная коробка передач была разработана европейскими автомобильными компаниями для улучшения характеристик управления автомобилем, особенно в условиях вождения в перегруженных транспортом городах с частыми остановками и стартами.
В стандартных автомобилях массового производства
ручка переключения скоростей находится там же, где и ручка механической
коробки, но вместо Ж-образного переключения, ручка переключается только вперед
или назад. А вот в машинах, участвующих в гонках Формула-1, вместо ручки
переключения скоростей установлены две педали переключения скоростей. При
нажатии одной педали скорость увеличивается, другой — снижается.
А вот в машинах, участвующих в гонках Формула-1, вместо ручки
переключения скоростей установлены две педали переключения скоростей. При
нажатии одной педали скорость увеличивается, другой — снижается.
Роботизированная коробка передач работает следующим образом. При переключении ручки передач и нажатии педали газа сенсоры передают информацию в процессинговый блок, который в свою очередь передает сигнал в коробку передач. Сенсоры коробки передач сообщают в процессинговый блок информацию о действующей скорости и новом требовании переключения скоростей. Процессинговый блок синхронизирует информацию, полученную от сенсоров, и выбирает оптимальную скорость и время переключения скоростей и обеспечивает слаженность работы механизмов коробки передач. При этом принимается в расчет скорость вращения двигателя, работа кондиционера, показатели доски управления.
Центральный процессинговый блок управляет гидромеханическим блоком, который смыкает или размыкает сцепление. Этот процесс происходит синхронно с действием водителя, переключающего ручку скоростей. Гидромеханический блок состоим из севромотора, который связан с линейным актуатором. Он использует тормозную жидкость из тормозной системы для запуска гидравлического цилиндра, обеспечивающего движение актуатора.
Преимущество системы основано на том, что электроника реагирует быстрее человека и более точно, поэтому завершить сцепление можно без участия водителя. Для парковки автомобиля, обратного движения или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.
По сути, сцепление нужно только для того, чтобы
машина пришла в движение. Для быстрого переключения скорости на более высокую
необходимо убрать ногу с педали газа, чтобы двигатель сбавил обороты для
скорости, подходящей для переключения на следующую скорость. Однако для этого
необходимо, чтобы ручка передачи скоростей стояла на нужной позиции.
Роботизированные коробки передач применяются не только в легковых автомобилях, но и в грузовых и даже автобусах. В 2007 году производитель мотоциклов Ямаха представил роботизированную коробку передач на спортивном мотоцикле серии FJR 1300.
На легковых автомобилях роботизированная коробка передач имеет свое название у каждого производителя. Вот список названий: Quickshift (Рено), 2-tronic (Пежо), Allshift, Twin Clutch SST, Sporttronic (Мицубиси), Easytronic (Опель), Durashift EST (Форд), Dualogic (Фиат), MultiMode, SMT (Тойота), i-Shift (Хонда), Sensinic или ACS (Сааб), SensoDrive или EGS, или BMP (Ситроен), Speedgear (Фиат), Selespeed (Альфа Ромео, Фиат), Duo Select (Масерати), Automatic Stickshift,
Принципы робототехники
Слово робот происходит от Чешское слово для принудительного труда или крепостного. Было введено драматурга Карела Чапека, чей вымышленный робот изобретения были созданы химическими и биологическими, методы, а не механические. В основном роботы состоит из:
Механическая конструкция , например как колесная платформа, рука или другая конструкция, способен взаимодействовать с окружающей средой.
Датчики для определения окружающей среде и дать полезную обратную связь устройству.
Системы для обработки сенсорной информации ввод в контексте текущей ситуации и дать указание устройству выполнить ответные действия к ситуации.
Механическая конструкция
Конструкция робота состоит в основном из корпус робота, включающий руки и колеса.Некоторая сила например, для изготовления ручек и колес требуется электричество. повернуть по команде. Один из самых интересных аспектов робота в целом — это его поведение, которое требует форма интеллекта.
Двигатели
Разнообразные электродвигатели обеспечивают
мощность для роботов, заставляя их двигаться с различными
запрограммированные движения. Рейтинг КПД двигателя
описывает, сколько электроэнергии потребляется
превращается в механическую энергию.
Рейтинг КПД двигателя
описывает, сколько электроэнергии потребляется
превращается в механическую энергию.
Двигатели постоянного тока. Постоянный магнит постоянного тока для двигателей требуется только два провода, и используется расположение фиксированные и электромагниты (статор и ротор) и переключатели. Они образуют коммутатор для создания движения. через вращающееся магнитное поле.
Двигатели переменного тока. Эти двигатели циклируют мощность на входных выводах, чтобы непрерывно перемещать поле.
Двигатели шаговые. Они похожи на бесщеточный двигатель постоянного или переменного тока. Они перемещают ротор на подачи питания на разные магниты в двигателе в последовательность (пошаговая). Шаговые двигатели предназначены для точный контроль и не только вращается по команде, но и может вращение с любым количеством шагов в секунду (до их максимальная скорость).
Серводвигатели. Сервоприводы простые DC двигатели с редуктором и системой управления с обратной связью. Они настраиваются, пока они не совпадут с сигналом. Сервоприводы используются в радиоуправляемых самолетах и автомобилях.
Подробнее о двигателях
Механизмы
Шестерни и цепи . Шестерни и цепи — это механические детали, обеспечивающие механизм для передачи вращательного движения из одного места в другое с возможно изменить его по ходу дела.Изменение скорости между двумя шестернями зависит от количества зубьев на каждая передача.
Шкивы и
ремни. Шкивы и ремни, две другие простые машины
используются в роботах, работают так же, как шестерни и цепи.
Шкивы — это колеса с канавкой по краю, и
Ремни — это резиновые петли, которые входят в эту канавку.
Коробки передач . Коробка передач работает по тем же принципам, что и шестерня и цепь, без цепи. Примеры коробки передач находятся на трансмиссии в автомобиле и подача бумаги принтера.
Датчики
Роботы работают по основному измерения, требующие различных типов датчиков.А чувство времени обычно встроено в аппаратное и программное обеспечение, которое быстро обновляется. Датчики взаимодействуют с внешней средой и преобразует энергию, связанную с тем, что есть измеряется (звук, свет, давление, температура и т. д.) в другую форму энергии. Общие датчики, используемые в робототехника включает датчики света, сенсорные датчики, датчики звука и датчик ускорения.
А звуковой датчик установлен в месте уха робот для обнаружения голоса объекта.An датчик ускорения установлен в кузове для обнаружить тряску. Датчик касания установлен в лоб робота для обнаружения касания
Блок питания
Как правило, питание осуществляется от два типа источников: батареи, которые используются только один раз а затем выбросили; и аккумуляторные батареи, которые работают за счет обратимой химической реакции и могут быть перезаряжался тысячу раз.Первое использование аккумулятор обеспечивает до 4 часов непрерывной работы работа в приложении.
Система управления
Есть две основные системы управления роботы: логическая схема и микроконтроллер.
Логическая схема
Цифровая логическая схема управляет
механическая система.Цепь обычно подключается к
механическая структура через мостовое реле . А
управляющий сигнал создает магнитное поле в реле
катушка, которая механически замыкает переключатель. транзисторы, для
Например, хорошие кремниевые переключатели, доступные во многих
технологии управления механическими системами.
А
управляющий сигнал создает магнитное поле в реле
катушка, которая механически замыкает переключатель. транзисторы, для
Например, хорошие кремниевые переключатели, доступные во многих
технологии управления механическими системами.
Микроконтроллер
Микроконтроллеры умны электронные устройства, которые используются внутри роботов.Они выполнять функции, аналогичные тем, которые выполняет микропроцессор (CPU) внутри персонального компьютера. Микроконтроллеры медленнее и имеют меньше памяти, чем ЦП, но предназначены для решения реальных проблем управления. Одно из основных различий между процессорами и микроконтроллеры — это количество внешних компонентов необходимо управлять ими. Микроконтроллеры могут работать без внешние части, и обычно требуется только внешний кристалл или осциллятор.
Есть три основных характеристики микроконтроллер на рассмотрение: скорость, размер и объем памяти. Скорость обозначается в тактовых циклах, а обычно измеряется в миллионах циклов в секунду (Мегагерцы, МГц). Размер указывает количество биты информации, которые микроконтроллер может обрабатывать в один шаг (например, 4-, 8-, 16- и 32-битные). Микроконтроллеры насчитывают большую часть своей постоянной памяти (ПЗУ) в тысячах байтов (kB) и r и память доступа (БАРАН) в одиночных байтах.
Подключение к математике
Конфигурация робота
Проектирование и разработка компактного высокомоментного роботизированного привода для космических механизмов | J. Механизмы Робототехника
Космическим роботам требуются компактные системы шарнирного привода (JDS), обычно состоящие из привода, трансмиссии, шарнирных элементов, которые могут передавать высокие крутящие моменты через жесткие механические порты. Сегодняшние традиционные космические приводные системы состоят из стандартных приводов и многоступенчатых трансмиссий, которые обычно включают от трех до шести ступеней. Эта текущая практика имеет определенные преимущества, такие как короткое время разработки из-за доступности механических компонентов. Однако ему не хватает интеграции на системном уровне, которая учитывает структуру привода, размер и выходное усилие, структуру трансмиссии, передаточное число и прочность, и часто приводит к длинным и громоздким узлам с большим количеством деталей.В этой статье представлено новое аппаратное обеспечение робота, которое объединяет JDS робота в одно компактное устройство, оптимизированное для его размера и максимальной плотности крутящего момента. Это достигается путем разработки роботизированного соединения с использованием специальной трансмиссии, которая при численной оптимизации может создавать неограниченные передаточные числа, используя только две ступени. Конструкция компьютеризирована, чтобы получить все решения, которые удовлетворяют его кинематическим отношениям в пределах заданного диаметра привода. По сравнению с существующими роботизированными приводами предлагаемая конструкция может привести к созданию более коротких сборок со значительно меньшим количеством деталей при том же выходном крутящем моменте.Теоретические результаты демонстрируют потенциал примера устройства, для которого был изготовлен доказательный пластиковый макет, который может обеспечить крутящий момент более 200 Н · м в корпусе размером с локтевой сустав человека. Предлагаемая технология может иметь серьезные технологические последствия в других отраслях, таких как механическое протезирование и реабилитационное оборудование.
Сегодняшние традиционные космические приводные системы состоят из стандартных приводов и многоступенчатых трансмиссий, которые обычно включают от трех до шести ступеней. Эта текущая практика имеет определенные преимущества, такие как короткое время разработки из-за доступности механических компонентов. Однако ему не хватает интеграции на системном уровне, которая учитывает структуру привода, размер и выходное усилие, структуру трансмиссии, передаточное число и прочность, и часто приводит к длинным и громоздким узлам с большим количеством деталей.В этой статье представлено новое аппаратное обеспечение робота, которое объединяет JDS робота в одно компактное устройство, оптимизированное для его размера и максимальной плотности крутящего момента. Это достигается путем разработки роботизированного соединения с использованием специальной трансмиссии, которая при численной оптимизации может создавать неограниченные передаточные числа, используя только две ступени. Конструкция компьютеризирована, чтобы получить все решения, которые удовлетворяют его кинематическим отношениям в пределах заданного диаметра привода. По сравнению с существующими роботизированными приводами предлагаемая конструкция может привести к созданию более коротких сборок со значительно меньшим количеством деталей при том же выходном крутящем моменте.Теоретические результаты демонстрируют потенциал примера устройства, для которого был изготовлен доказательный пластиковый макет, который может обеспечить крутящий момент более 200 Н · м в корпусе размером с локтевой сустав человека. Предлагаемая технология может иметь серьезные технологические последствия в других отраслях, таких как механическое протезирование и реабилитационное оборудование.
Для многих роботизированных приложений требуются компактные системы шарнирных приводов (JDS), которые могут создавать высокие крутящие моменты на низких скоростях для таких приложений, как космические роботы. Обычные системы привода разрабатываются путем последовательного соединения привода с какой-либо трансмиссией с высоким передаточным числом, такой как электродвигатель с гармоническим приводом (HD) или планетарная зубчатая передача (PGT). Несмотря на свою популярность, этот подход часто приводит к созданию длинных и громоздких сборок, которые увеличивают размер и сложность робота и уменьшают его рабочее пространство и размер укладки [1]. Кроме того, обычные компактные трансмиссии с высоким передаточным числом, такие как гармонические приводы, имеют высокое трение и низкую жесткость, что ограничивает их способность работать как чисто усилители крутящего момента при отсутствии схем нелинейного управления крутящим моментом [2].
Обычные системы привода разрабатываются путем последовательного соединения привода с какой-либо трансмиссией с высоким передаточным числом, такой как электродвигатель с гармоническим приводом (HD) или планетарная зубчатая передача (PGT). Несмотря на свою популярность, этот подход часто приводит к созданию длинных и громоздких сборок, которые увеличивают размер и сложность робота и уменьшают его рабочее пространство и размер укладки [1]. Кроме того, обычные компактные трансмиссии с высоким передаточным числом, такие как гармонические приводы, имеют высокое трение и низкую жесткость, что ограничивает их способность работать как чисто усилители крутящего момента при отсутствии схем нелинейного управления крутящим моментом [2].
В качестве альтернативы, обычные планетарные и обычные зубчатые передачи требуют наличия нескольких ступеней для достижения высоких передаточных чисел и могут привести к созданию длинных и громоздких узлов для приложений с высоким крутящим моментом. Другие типы роботизированных приводных систем основаны на интеллектуальных материалах, таких как пьезоэлектрик, сплавы с памятью формы, магнитореологические и электроактивно-полимерные приводы. Они имели ограниченный успех в разработке полностью функциональных роботизированных приводных систем, либо все еще находятся на ранних стадиях практического внедрения, либо не достигли окончательных результатов.Следовательно, разработка компактных и эффективных систем привода может улучшить производительность многих роботизированных систем и систем управления движением, особенно мобильных приложений с жесткими требованиями к крутящему моменту и размеру. Такие усовершенствования в технологии приводных систем также могут способствовать появлению новых продуктов, таких как легкие протезы, которые невозможны с существующими двигателями и системами трансмиссии [3]. До настоящего времени портативные энергетические системы для переобучения голеностопного сустава имели ограниченную коммерциализацию за пределами специализированных больниц и реабилитационных клиник, главным образом из-за отсутствия адекватных готовых актуаторных технологий [4].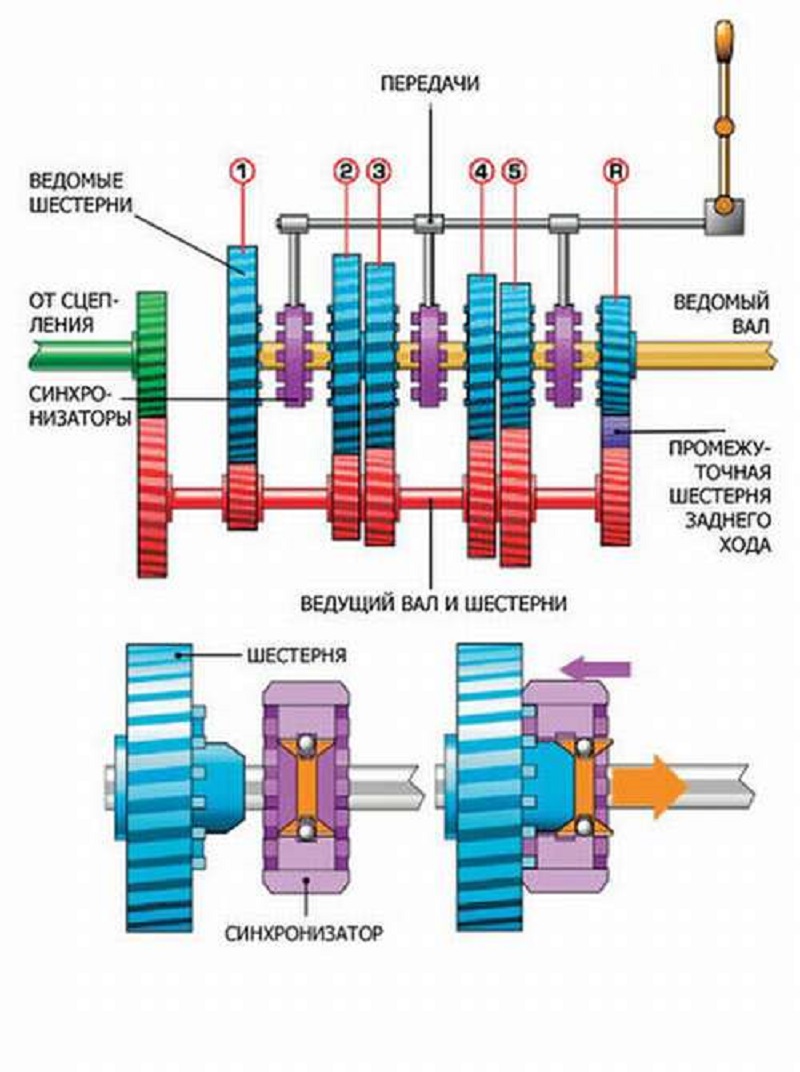 Чтобы облегчить развитие этих устройств в более удобные для пользователя системы, следует разработать новые формы приведения в действие с такими ключевыми возможностями, как высокий выходной крутящий момент / усилие, легкий, ненавязчивый и энергоэффективный.
Чтобы облегчить развитие этих устройств в более удобные для пользователя системы, следует разработать новые формы приведения в действие с такими ключевыми возможностями, как высокий выходной крутящий момент / усилие, легкий, ненавязчивый и энергоэффективный.
Робот JDS соединяет и приводит в движение два звена робота относительно друг друга (см. Рис. 1). Для выполнения своих функций JDS должен содержать (1) привод для подачи силы или крутящего момента, (2) трансмиссию для усиления силы привода и, наконец, (3) конструкцию шарнира, которая ограничивает подвижность звеньев до одного градуса. -свободы при несении нагрузок в остальных степенях свободы.
Независимо от размера и веса, динамика JDS в основном определяется характеристиками привода / трансмиссии, такими как передаточное число, жесткость трансмиссии, инерция, трение и люфт. Эти свойства играют ключевую роль в работе робота, а также в разработке его системы управления. Например, передача с низкой жесткостью уменьшает полосу пропускания сил системы привода и вносит нестабильность в контуры обратной связи с высоким коэффициентом усиления [5].Кроме того, трение трансмиссии повышает требования к пусковому крутящему моменту привода, увеличивает его размер и снижает точность. В случае ограничений трансмиссии, таких как нелинейное трение и / или жесткость, нелинейные регуляторы используются для улучшения отношения входного / выходного крутящего момента трансмиссии [6].
В течение последних четырех десятилетий значительное количество исследований было посвящено разработке и пониманию компактных трансмиссий с высоким передаточным числом, таких как гармонические передачи.Гармонические приводы в первую очередь полезны для разработки компактных приводных систем с высоким крутящим моментом [7]. Несмотря на их популярность, два основных эксплуатационных недостатка гармонических приводов — это высокое трение и низкая жесткость. Трение восходит к основному принципу работы гармонического привода, который основан на трении скользящих зубцов между его гибкой линией и круговой шлицей. Еще один источник трения в гармоническом приводе — это высокая радиальная предварительная нагрузка генератора волн. Трение в гармонических двигателях широко изучается многими исследователями, например, в работах [1,95].[8] и [9], и хорошо известно, что он демонстрирует нелинейное поведение в результате действия скользящих зубцов. Кроме того, работа передачи гармонического привода основана на непрерывной деформации ее основного компонента, гибкой линии. Эта гибкость создает путь нагрузки с низкой жесткостью, который уменьшает рабочую полосу пропускания робота, вызывает резонанс и создает эффект люфта [9,10]. В результате гармонические приводы не работают как чистые усилители крутящего момента [11,12], так что их отклик скорости без обратной связи загрязнен не только вибрациями, но и непредсказуемыми скачками скорости после областей резонанса [9].Наконец, гармонические приводы ограничены передаточными числами ниже 1: 320 [13] по конструкции и неэффективны в низкотемпературных средах, таких как космос [14].
Несмотря на их популярность, два основных эксплуатационных недостатка гармонических приводов — это высокое трение и низкая жесткость. Трение восходит к основному принципу работы гармонического привода, который основан на трении скользящих зубцов между его гибкой линией и круговой шлицей. Еще один источник трения в гармоническом приводе — это высокая радиальная предварительная нагрузка генератора волн. Трение в гармонических двигателях широко изучается многими исследователями, например, в работах [1,95].[8] и [9], и хорошо известно, что он демонстрирует нелинейное поведение в результате действия скользящих зубцов. Кроме того, работа передачи гармонического привода основана на непрерывной деформации ее основного компонента, гибкой линии. Эта гибкость создает путь нагрузки с низкой жесткостью, который уменьшает рабочую полосу пропускания робота, вызывает резонанс и создает эффект люфта [9,10]. В результате гармонические приводы не работают как чистые усилители крутящего момента [11,12], так что их отклик скорости без обратной связи загрязнен не только вибрациями, но и непредсказуемыми скачками скорости после областей резонанса [9].Наконец, гармонические приводы ограничены передаточными числами ниже 1: 320 [13] по конструкции и неэффективны в низкотемпературных средах, таких как космос [14].
Другими обычно используемыми передачами в роботизированных механизмах являются PGT, такие как в Refs. [15–17]. Европейский роботизированный манипулятор использует четырехступенчатый планетарный редуктор с передаточным числом 450: 1 на его шарнирах [16]. Чтобы уменьшить количество деталей и сложность сборки, коронные шестерни разделены между первой и последней двумя ступенями.Точно так же в системе привода марсохода [17] используются трансмиссии, состоящие из трех-пяти ступеней с передаточными числами от 1528: 1 до более 5000: 1. Потребность в повышенном понижении передачи важна во многих космических приложениях, поскольку они работают с высокими крутящими моментами и низкими скоростями. Следовательно, реализация PGT в космических механизмах часто включает многоступенчатые зубчатые передачи, которые охватывают большое количество деталей, таких как водила планетарной передачи, подшипники водила и отдельные подшипники планетарной передачи, что не только увеличивает сложность, но и снижает надежность таких механизмов.
Следовательно, реализация PGT в космических механизмах часто включает многоступенчатые зубчатые передачи, которые охватывают большое количество деталей, таких как водила планетарной передачи, подшипники водила и отдельные подшипники планетарной передачи, что не только увеличивает сложность, но и снижает надежность таких механизмов.
Другое недавнее исследование роботизированных приводных систем касалось проблемы оптимизации соединения двигатель / трансмиссия для его наибольшего крутящего момента на инерцию в предположении, что высокие передаточные числа добавляют массу, инерцию и потери на трение [18]. Его результаты показывают, что самый большой двигатель и наименьшая трансмиссия в пределах размера соединения являются оптимальными. Однако этот подход не рассматривает приложения, требующие высоких крутящих моментов при ограниченной допустимой силе тока, например космические роботы.
Другими типами компактных трансмиссий в литературе по робототехнике и управлению движением являются циклоидальные редукторы [19,20] или гибридные комбинации планетарных и циклоидальных передач, известные как редукторы RV. Анализ этих механизмов показал, что, хотя они имеют более высокий КПД по сравнению с гармоническими приводами, они страдают от значительного люфта и больших ошибок передачи [21]. Кроме того, кажется, что в литературе есть пробел, касающийся максимально допустимых передаточных чисел циклоидальных приводов по отношению к их максимальному выходному крутящему моменту.
Таким образом, большинство систем привода, разработанных на сегодняшний день, основаны на коммерческих двигателях, соединенных с редукторными трансмиссиями какого-либо типа [22–24], и им не хватает интеграции на системном уровне для двигателя, трансмиссии и совместной конструкции.
В следующем документе рассматривается интеграция конструкции и оптимизация роботизированной системы привода с учетом конструкции двигателя и выходного крутящего момента, конструкции и прочности трансмиссии, передаточного числа, опоры выходного подшипника и конструкции шарнира робота.Кроме того, мы предлагаем новую дифференциальную планетарную трансмиссию, которая способна обеспечивать практически любое передаточное число при правильной оптимизации и которая, согласно обширным исследованиям авторов, никогда не изучалась в контексте разработки роботизированных шарниров. Однако трансмиссии с дифференциальным приводом были первоначально разработаны для автомобильной промышленности для распределения крутящего момента двигателя [25].
Ссылаясь на ранее связанную работу в Refs.[26] и [27], в этой статье рассматривается подробный проект механизма срабатывания JDS и представлена численная оптимизационная модель для его узла двигатель / трансмиссия. Кроме того, изучаются два тематических исследования, показывающих сравнение с обычным гармоническим приводом и планетарной трансмиссией. По сравнению с космическими приводными системами, которые были опубликованы в литературе, например, в статьях. [27–29], предлагаемая конструкция не только компактна, но и более универсальна благодаря своей инновационной конструкции трансмиссии, которая может обеспечивать любое передаточное число от 1: 1 до 5000: 1 с использованием только двух ступеней и стандартных диаметральных шагов.Кроме того, предлагаемый JDS является самоблокирующимся из-за своего высокого передаточного числа и, как таковой, не требует фиксирующего тормоза двигателя при больших передаточных числах, как в Ref. [27] для сохранения положения нагрузки в случае внезапной потери мощности.
Трансмиссия JDS представляет собой двухступенчатую дифференциальную планетарную передачу, схематически изображенную на рис. 2. Входом в этот механизм является солнечная шестерня ( N 2 ), а выходом — коронная шестерня ( N 5 ).Механизм крепится к земле с помощью зубчатого венца первой ступени ( N 1 ). Две планеты ( N 4 , N 6 ) с обеих ступеней жестко прикреплены и, как таковые, ведут себя как одно твердое тело.
2. Входом в этот механизм является солнечная шестерня ( N 2 ), а выходом — коронная шестерня ( N 5 ).Механизм крепится к земле с помощью зубчатого венца первой ступени ( N 1 ). Две планеты ( N 4 , N 6 ) с обеих ступеней жестко прикреплены и, как таковые, ведут себя как одно твердое тело.
Трансмиссия приводится в движение двигателем с внешним ротором, встроенным в ее солнечную шестерню, как показано на рис. 3. Набор цилиндрических поверхностей роликов удерживает радиальное положение планетарного ряда, тем самым устраняя необходимость в водиле, планетах, двигателе, и несущие подшипники.Симметрия земля-земля применяется для уравновешивания внутренних моментов рыскания, которые в противном случае действовали бы на планеты из-за пары момента земля-выход.
Ключ к преимуществу этой концепции в высоком крутящем моменте описан на схемах свободного тела планетарно-планетарной муфты ( N 4 , N 6 ), показанных на рис. 4. Шестерни представлены своими шаговые диаметры (PD) для простоты, где D 1 , D 2 , D 4 , D 5 и D 6 обозначают шаговые диаметры заземленная коронная шестерня, солнечная шестерня первой ступени, планетарная передача первой ступени, кольцевая шестерня второй ступени и планетарная шестерня второй ступени, соответственно, и T в и T out — это входной и выходной крутящие моменты механизма.
В состоянии равновесия сумма моментов, действующих вокруг мгновенной оси вращения, дает преимущество крутящего момента механизма какTout = 2D4D5D2 (D4-D6) Tin
(1) Уравнение (1) показывает, что выходной крутящий момент обратно пропорционален разнице между диаметрами шага планет ( D 4 — D 6 ), так что передаточное число в основном определяется шестернями планет и довольно независимо от размера трансмиссии. Это связано с тем, что входная сила двигателя действует на рычаг момента D 4 , в то время как выходная сила действует на рычаг с гораздо меньшим крутящим моментом, эквивалентный (D 4 — D 6 ) / 2 . В результате этого отношения можно регулировать диаметры шага планет для получения очень высоких передаточных чисел без необходимости добавления дополнительных ступеней. Количество зубьев шестерни, соответствующее таким высоким передаточным числам, обосновано более подробно в гл.2.2 численными методами. Кроме того, как было показано в [5]. [30], что передаточное число привода значительно влияет на величину и распределение кинетической энергии внутри роботов-манипуляторов и может улучшить их пространственную точность за счет уменьшения воздействия их сил инерции. Это еще раз подтверждает важность разработки роботизированных соединений, способных создавать большие диапазоны передаточных чисел по своей конструкции.
Это связано с тем, что входная сила двигателя действует на рычаг момента D 4 , в то время как выходная сила действует на рычаг с гораздо меньшим крутящим моментом, эквивалентный (D 4 — D 6 ) / 2 . В результате этого отношения можно регулировать диаметры шага планет для получения очень высоких передаточных чисел без необходимости добавления дополнительных ступеней. Количество зубьев шестерни, соответствующее таким высоким передаточным числам, обосновано более подробно в гл.2.2 численными методами. Кроме того, как было показано в [5]. [30], что передаточное число привода значительно влияет на величину и распределение кинетической энергии внутри роботов-манипуляторов и может улучшить их пространственную точность за счет уменьшения воздействия их сил инерции. Это еще раз подтверждает важность разработки роботизированных соединений, способных создавать большие диапазоны передаточных чисел по своей конструкции.
Другой ключевой характеристикой этой концепции является использование структурной симметрии для уравновешивания внутренних нагрузок внутри трансмиссии, что в противном случае потребовало бы дополнительных несущих опор и компонентов.Схема свободного тела, показанная на рис. 4, показывает, что силы, действующие на сборку планет, лежат в двух разных плоскостях. Это создает момент рыскания, который имеет тенденцию искажать параллельность и перпендикулярность планет по отношению к их плоскости вращения.
Чтобы противодействовать этому моменту рыскания, выходной каскад помещается между двумя симметричными наземными каскадами таким образом, чтобы выходные планеты находились в состоянии равновесия нагрузки двойного сдвига, как показано на рис.5.
Кроме того, эта новая конфигурация позволяет жестко закрепить выход между двумя наземными конструкциями с помощью дуплексных подшипниковых узлов (например, спина к спине, тандем, лицом к лицу) для получения жесткого выхода JDS при всех типах нагрузок. Поперечные осевые силы реакции грунта обеспечивают поддержку против осевых и радиальных нагрузок, как показано на рис. 6.
Поперечные осевые силы реакции грунта обеспечивают поддержку против осевых и радиальных нагрузок, как показано на рис. 6.
JDS соединяется с использованием компонентов двойного назначения, чтобы упростить сборку и уменьшить количество деталей.Компоненты двойного назначения состоят из цилиндрических поверхностей роликов, прилегающих к компонентам зубчатой передачи. Эти поверхности размещают планетарный блок в радиальном направлении, тем самым устраняя необходимость в обычных водилах планетарной передачи и соответствующих подшипниках, а также сохраняя воздушный зазор между статором и ротором (см. Рис. 3). Поверхности роликов имеют диаметр качения, равный диаметру прилегающей шестерни, чтобы синхронизировать тягу шестерни и движение качения, как показано на рис. 7.
Кроме того, планетарный блок удерживается в осевом направлении за счет упора между плоской поверхностью роликов и коронками зубьев коронной шестерни.Это связано с тем, что диаметр планетарного ролика в радиальном направлении больше меньшего диаметра коронной шестерни. В этой конфигурации действие зубьев шестерни и функции опоры подшипника интегрированы друг с другом, что приводит к очень компактной конструкции JDS. Двигатель состоит из внешнего магнитного ротора и полой пластины статора. Ротор встроен в солнечную шестерню, в то время как статор прикреплен к заземленному компоненту, как показано на рис. 3. В концепции воздушный зазор между статором и ротором поддерживается теми же поверхностями роликов, которые радиально устанавливают и выравнивают оставшиеся планетарный кластер.
Учитывая важность плотности крутящего момента (крутящий момент на вес) в системе совместного привода робота, было проведено исследование численной оптимизации аналитической модели для оценки плотности крутящего момента в диапазоне значений параметров шестерни. Традиционно проектирование зубчатых колес представляет собой итеративный процесс, однако в этой статье мы компьютеризируем конструкцию, решая все решения этой конструкции, которые находятся в пределах заданного выходного диаметра.Чтобы ограничить объем оптимизации, были сделаны следующие проектные допущения:
Традиционно проектирование зубчатых колес представляет собой итеративный процесс, однако в этой статье мы компьютеризируем конструкцию, решая все решения этой конструкции, которые находятся в пределах заданного выходного диаметра.Чтобы ограничить объем оптимизации, были сделаны следующие проектные допущения:
- (1)
Диаметр ротора двигателя почти равен диаметру отверстия солнечной шестерни или меньше его.
- (2)
Минимальное количество зубьев на ведущей шестерне планетарной передачи составляет 10 (или больше), чтобы избежать подрезки шестерни.
- (3)
Крутящий момент двигателя, усиленный передаточным числом, ниже, чем крутящий момент отказа трансмиссии.
- (4)
Стандартные диаметральные шаги варьируются от 10 до 96 зубьев / дюйм.
N2P1 + N4P1 = N5P2 − N6P2 = 2K
(3) где P 1 и P 2 — диаметральные шаги первой и второй ступеней соответственно, а N 4 и N 6 — количество зубьев планетарных шестерен. , с их значениями в диапазоне от 10 зубьев на шестерню до промежуточного произвольного значения (например,г., 30) с шагом 1 зуб. Кроме того, P 1 и P 2 должны иметь определенные значения шага, чтобы использовать стандартные зубчатые фрезы. Зная приблизительный диапазон значений для N 4 , N 6 , P 1 и P 2 , уравнение. (2) можно использовать для определения количества зубьев солнечной шестерни и выходного венца, обозначенного как N 2 и N 5 , как
Зная приблизительный диапазон значений для N 4 , N 6 , P 1 и P 2 , уравнение. (2) можно использовать для определения количества зубьев солнечной шестерни и выходного венца, обозначенного как N 2 и N 5 , какПараметры, показанные в таблице 1, использовались для заполнения переменных передачи по их возможным комбинациям для радиуса орбиты планет, увеличивающегося с 2 до 5 дюймов с шагом 0.1 дюйм. Допуская изменение радиуса рычага от 1 до 2 дюймов, параметры трансмиссии учитываются не только для различного количества зубьев, но и для физического диаметра трансмиссии.
Используя исчерпывающий поиск с помощью вычислений, в котором исключаются конфигурации передачи, которые имеют нецелые значения для N 2 и N 5 , мы получили примерно 2,5 × 10 6 решений с отношениями, изменяющимися от -5000: 1 до +5000: 1.Для каждой из этих конфигураций передаточное число решается с использованием следующего уравнения:ToutTin = 1 + N1N21 − N1N6N4N5
(7) Поскольку геометрию зубьев можно извлечь из диаметральных шагов и количества зубьев, можно выполнить анализ прочности на каждой конфигурации передачи во время вычислительного цикла. Статический анализ сил показывает, что планеты являются самыми слабыми компонентами трансмиссии и поэтому ограничивают максимальный выходной крутящий момент JDS. В частности, механическая мощность передается по трем точкам сетки, как показано на рис.8.Скорости на делительной линии (скорость прохождения зубьев) и передаточные силы в точках сетки даны как
Используя скорости и силы по тангажу, можно получить динамические коэффициенты и соответствующие силы разрушения для всех возможных конфигураций трансмиссии. Для этого планетарные напряжения рассчитываются с использованием критериев рейтинга зубчатых передач Американской ассоциации производителей зубчатых колес (AGMA), включая геометрические, материальные, монтажные и надежные факторы, связанные с каждой зубчатой передачей. Выходные силы, которые могут вызвать разрушение в трех точках сетки, рассчитываются с использованием контактных и изгибающих напряжений (см. AGMA 2001-DO4). Другие оставшиеся факторы, такие как перегрузка, монтаж, надежность и твердость поверхности, выбираются в соответствии с процессом изготовления / сборки.Наконец, вычислительный алгоритм возвращает матрицу, в которой каждая строка соответствует одной конфигурации этой конфигурации, а столбцы — ее соответствующие параметры. Репрезентативная выборка решений представлена в таблице 2.
Для этого планетарные напряжения рассчитываются с использованием критериев рейтинга зубчатых передач Американской ассоциации производителей зубчатых колес (AGMA), включая геометрические, материальные, монтажные и надежные факторы, связанные с каждой зубчатой передачей. Выходные силы, которые могут вызвать разрушение в трех точках сетки, рассчитываются с использованием контактных и изгибающих напряжений (см. AGMA 2001-DO4). Другие оставшиеся факторы, такие как перегрузка, монтаж, надежность и твердость поверхности, выбираются в соответствии с процессом изготовления / сборки.Наконец, вычислительный алгоритм возвращает матрицу, в которой каждая строка соответствует одной конфигурации этой конфигурации, а столбцы — ее соответствующие параметры. Репрезентативная выборка решений представлена в таблице 2.
Плотность крутящего момента JDS рассчитывается на основе крутящего момента при отказе и расчетного веса шестерен и двигателя. На рисунке 9 показано соотношение между передаточным числом и плотностью крутящего момента JDS.Каждая точка представляет одну конфигурацию JDS. Отрицательные отношения указывают на обратное направление между входными / выходными движениями трансмиссии.
Поскольку взаимосвязь между передаточным числом и плотностью крутящего момента ограничивается способностью двигателя выдавать достаточный крутящий момент при определенном передаточном числе, решения JDS затем были отфильтрованы с использованием диаметра двигателя (взятого из диаметра отверстия солнечной шестерни) по требуемому двигателю. крутящий момент (крутящий момент отказа JDS в зависимости от передаточного числа).Этот процесс исключает конфигурации JDS с двигателями большего и меньшего размера и оставляет около 460 решений из возможных 2,5 × 10 6 . Эти конфигурации показаны на рис. 10. Классификация двигателей по размерам была оценена в соответствии с данными, предоставленными BEI KIMCO Magnetics, Inc (Сан-Диего, Калифорния). 2
После анализа данных, одна комбинация приводов с максимально возможной плотностью крутящего момента с диаметром JDS, равным 4.5 дюймов было выбрано с учетом технологичности системы и использования стандартных компонентов подшипников. Эти характеристики перечислены в Таблице 3. Из Таблицы 3 очевидно, что только небольших различий в диаметрах шага планет (17,65 мм, 17,57 мм) достаточно для получения высокого передаточного числа (1: 900). Для соответствия этим спецификациям было разработано несколько концепций дизайна с использованием, по возможности, стандартных механических компонентов. В предварительной концепции, показанной на рис. 11, шестерня с меньшей шириной торца размещается на более длинном плече момента, чтобы уравновесить момент рыскания, как показано на рис.4.
Следует отметить, что в двух ступенях используются несколько разные нормальные диаметральные шагы, так что рабочие диаметры шага планетарных и коронных шестерен почти, но не в точности равны при высоких передаточных числах. Среднее передаточное число на один оборот на выходе постоянно, так как оно зависит от количества зубьев на шестернях. Точность изготовления влияет на мгновенную ошибку передаточного числа, обычно известную как кинематическая ошибка, которая отвечает за шум и вибрации в коробке передач, и выходит за рамки данной статьи.
Матрица проектирования была установлена между различными концепциями с учетом прочности конструкции и тепловыделения, производственных допусков и выравнивания кластера планетарных шестерен. Конечный элемент прочности и термический анализ были выполнены на механизме, чтобы гарантировать производительность в соответствии со спецификациями, изложенными в таблице 3. Окончательная модель автоматизированного проектирования представлена на рисунке 12.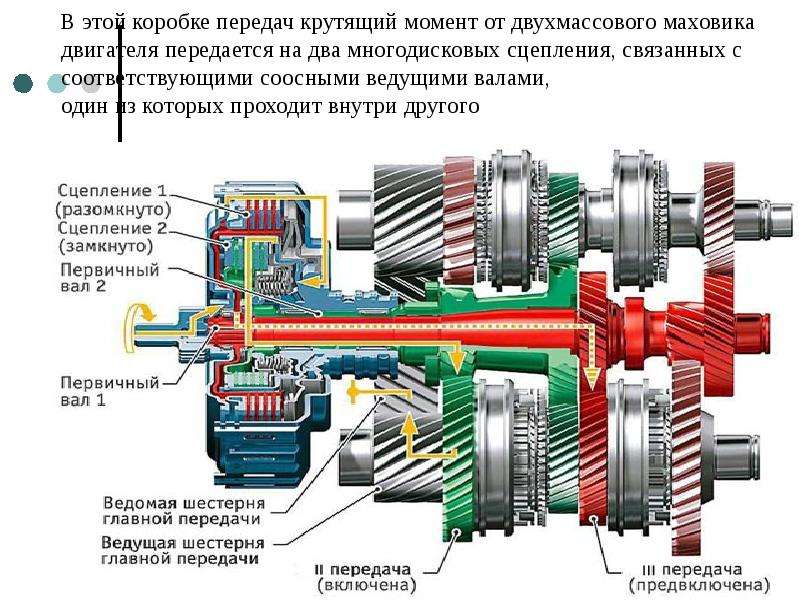 Некоторые из основных проблем проектирования, с которыми сталкивается эта концепция, — это точность выравнивания «земля-земля» и рассеивание тепла двигателем. Результаты анализа методом конечных элементов (FEA) подтвердили аналитические прочностные и тепловые модели, а также подтвердили допустимый крутящий момент трансмиссии и теплоотдачу двигателя. Пластиковый макет был разработан с использованием технологии аддитивного производства, чтобы получить практическое представление о конструкции JDS, а инженерная модель показана на рис. 13. Этот макет успешно подтвердил передаточное число и предоставил практическую обратную связь по конструкции при эксплуатации и сборке механизма до его установки. разработка дорогостоящего металлического варианта системы.
Некоторые из основных проблем проектирования, с которыми сталкивается эта концепция, — это точность выравнивания «земля-земля» и рассеивание тепла двигателем. Результаты анализа методом конечных элементов (FEA) подтвердили аналитические прочностные и тепловые модели, а также подтвердили допустимый крутящий момент трансмиссии и теплоотдачу двигателя. Пластиковый макет был разработан с использованием технологии аддитивного производства, чтобы получить практическое представление о конструкции JDS, а инженерная модель показана на рис. 13. Этот макет успешно подтвердил передаточное число и предоставил практическую обратную связь по конструкции при эксплуатации и сборке механизма до его установки. разработка дорогостоящего металлического варианта системы.
В JDS используется конструкция с двойным заземлением, чтобы удерживать выходное звено через взаимно встречный подшипник. Таким образом, в конструкции используются два угловых шарикоподшипника из тонкого сечения (толщиной 1/4 дюйма), которые находятся на расстоянии 1,35 дюйма друг от друга, чтобы эффективно выдерживать изгибающие моменты до 847,4 Н · м при статическом коэффициенте безопасности 1,
.Анализ напряжения скручивания был выполнен на центральном валу, который несет половину выходной нагрузки, эквивалентной 135.1 Н · м. Исследование показало максимальное напряжение сдвига 64 МПа в зависимости от геометрии вала (внешний диаметр = 0,9 дюйма, внутренний диаметр = 0,5 дюйма), что эквивалентно коэффициенту безопасности 3,1 для алюминия 6061. Соответствующие результаты FEA показаны на рис. 14. Благодаря конструкции с двойным сдвигом выходной крутящий момент равномерно распределяется между наземными ступенями, что приводит к низким напряжениям во всей удерживающей конструкции.
Другой анализ методом конечных элементов был разработан для оценки прочности шестерен планет, которые являются самыми слабыми компонентами трансмиссии, как показано на рис.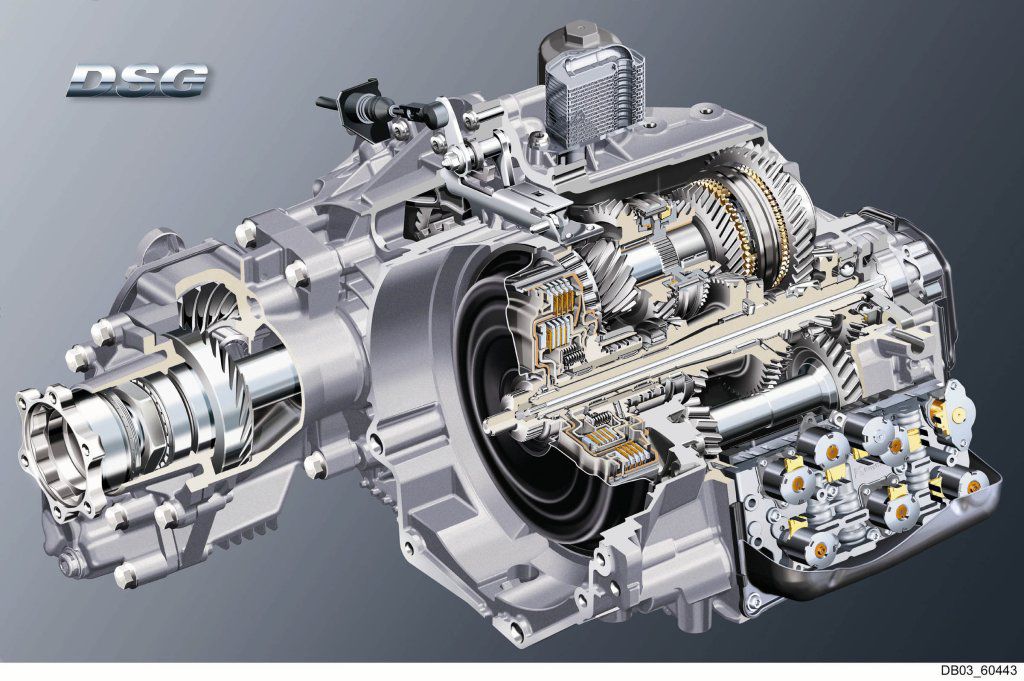 15.
15.
По результатам FEA наибольшие напряжения регистрируются в точках контакта и около корней зубьев шестерни. Максимальное расчетное напряжение составляет около 250 МПа. Это дает коэффициент безопасности 1,52 для легированной стали 4150, подвергнутой закалке и отпуску до RC 57-61.
Адаптация исполнительного механизма к плоской роботизированной руке изображена на рис.16. В дополнение к компактным размерам и большому выходному крутящему моменту, цельная конструкция привода поддерживает как одинарные, так и двойные срезные звенья на выходном и заземляющем элементах, соответственно. При установке на звено с двойным срезом жесткость соединения на кручение увеличивается, поскольку он действует параллельно центральному валу. Кроме того, вся электроника обратной связи и связи интегрирована и размещена в сборке JDS.
Конструкция манипулятора, показанная на рис.17 обладают как высокой полезной нагрузкой, так и очень компактным профилем, что позволяет стрелке исключительно хорошо работать в мобильных приложениях. Ключевой технологией, позволяющей использовать стрелу, является ее компактная система приведения в действие, которая способна обеспечивать высокие крутящие моменты и обеспечивать жесткую конструкцию шарнира, позволяя руке манипулировать тяжелыми грузами с ловкостью и точностью.
Универсальный характер предлагаемой конструкции облегчает разработку модульных систем с высокой полезной нагрузкой, которые можно реконфигурировать и адаптировать к выполняемой задаче.Все эти JDS могут иметь одинаковый компактный стандартный размер, но каждый, в зависимости от передаточного числа, может обеспечивать разную производительность. Этот подход может улучшить современные манипуляции, введя различные модульные соединения, которые можно заменить для различных задач, таких как медленное и точное манипулирование тяжелыми объектами или перемещение более легких объектов со скоростью и маневренностью.
Аналогичным образом, концепция привода JDS может быть полезна при разработке медицинских устройств, таких как протез локтя / руки верхней конечности, как показано на рис.18. В полностью пластиковом или гибридном сочетании пластик-металл JDS может обеспечить эффективный источник легкого срабатывания с батарейным питанием для таких устройств.
Чтобы оценить жизнеспособность этой технологии в космических приложениях, был проведен сравнительный анализ с летным приводом, предоставленным лабораторией реактивного движения НАСА. Стандартный полетный привод содержит двигатель в сборе, соединенный с многоступенчатой планетарной зубчатой передачей, через которую механическая энергия передается между ступенями через держатель рычага, как показано на рис.19.
Из-за такого расположения передаточное число (на ступень) пропорционально радиусу рычага водила по радиусу шага солнечной шестерни. Это накладывает ограничения на радиус шага солнечной шестерни и приводит к подрезанию солнечной шестерни, когда передаточное число превышает 8: 1 на ступень. В результате этого ограничения эта компоновка требует наличия нескольких ступеней для достижения высоких соотношений, что приводит к длинным, громоздким и сложным сборкам с большим количеством деталей и большим весом.На рисунке 20 показано сравнение аппаратной архитектуры стандартного полетного актуатора и предлагаемой концепции конструкции.
Очевидно, что предлагаемая конструкция JDS может значительно сократить количество частей системы совместного привода обычного робота, что приведет к созданию более компактных и надежных космических систем. Уменьшение количества деталей тесно связано с повышением надежности и снижением риска отказа, что имеет первостепенное значение в космических полетах.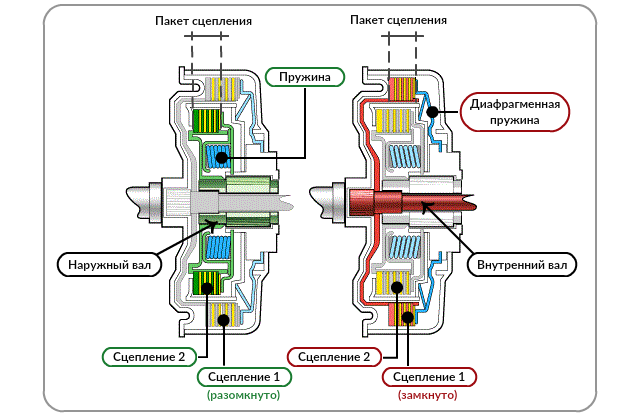 Подробное сравнение показано в Таблице 4.
Подробное сравнение показано в Таблице 4.
Сравнительный анализ JDS и гармонических приводов зависит от требований приложения, поскольку гармоники являются единственной передачей с сильно нелинейными жесткостью и трением. Чтобы проиллюстрировать некоторые из основных различий, одна конфигурация JDS сравнивается с гармонической передачей размером 25 с аналогичным выходным крутящим моментом, как показано в таблице 5.Очевидно, что трансмиссия Harmonic Drive превосходит конструкцию JDS во многих категориях, таких как количество деталей и объемная плотность крутящего момента, а также люфт. Однако гармонический привод демонстрирует гораздо большее рассеивание трения по сравнению с JDS из-за его механизма скользящей сетки и ограничивается передаточными числами ниже 1: 320 в основном из-за того, что его передаточное число определяется углом клина профиля его зуба. которое становится слишком узким выше этого отношения. С другой стороны, трансмиссия HD имеет нулевой люфт между валом двигателя и звеном робота, тогда как люфт в JDS в значительной степени определяется классом передач AGMA.Увеличение класса шестерни ужесточает допуски и уменьшает люфт, но не устраняет его.
В случае космического применения, в котором скорость и динамические эффекты менее значительны по сравнению со статическим крутящим моментом, потому что космические роботы движутся с низкой скоростью, интегрированная концепция JDS может привести к более компактной и более эффективной системе привода по сравнению с системой привода космического робота, которая использует передачу с гармоническим приводом. Это связано с тем, что высокое передаточное число трансмиссии JDS снижает требования к максимальному крутящему моменту двигателя, тем самым позволяя использовать двигатель меньшего размера, который занимает меньше места, потребляет меньше тока и выделяет меньше тепла по сравнению с двигателем.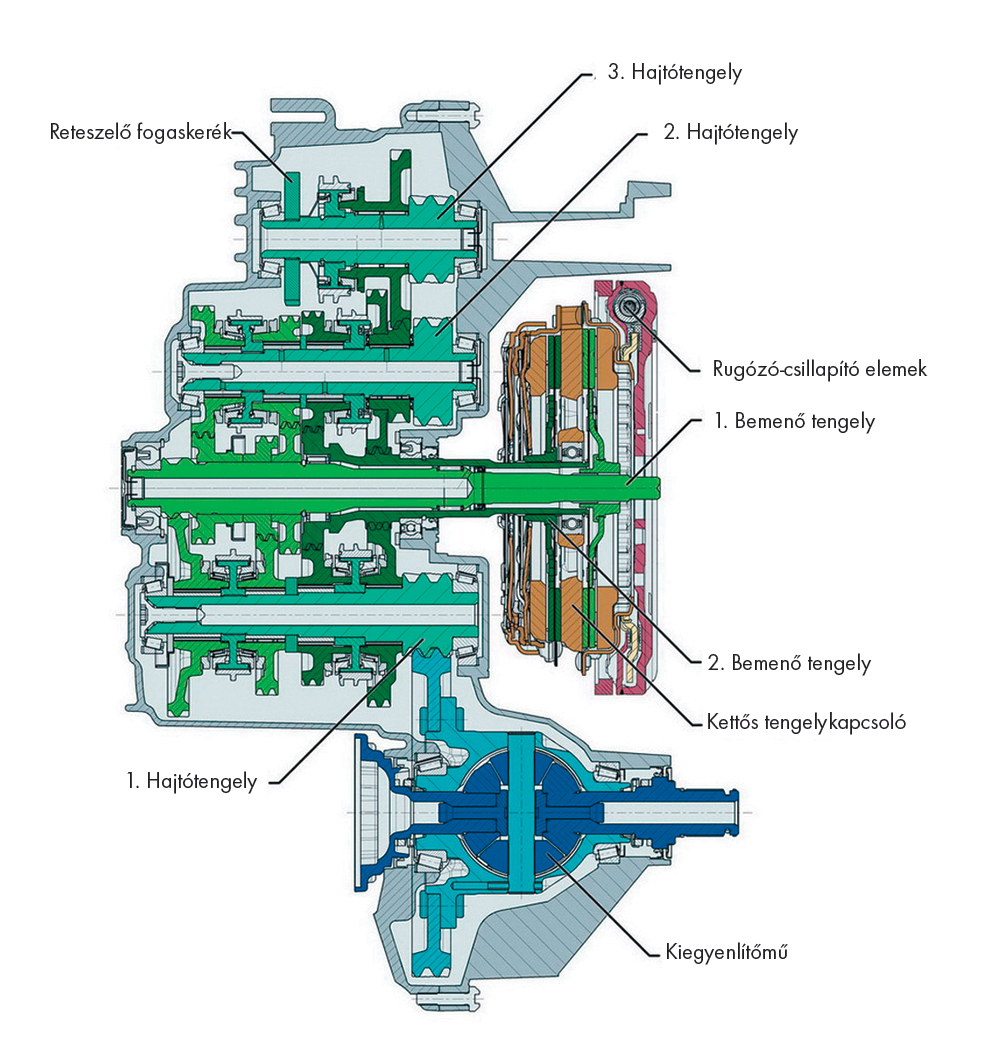 управление трансмиссией с гармонической передачей.Кроме того, поскольку конструкция JDS может поддерживать высокие передаточные числа, она не допускает движения задним ходом и не требует фиксирующего тормоза на валу двигателя при больших передаточных числах, как в случае большинства аппаратных средств космического привода. Кроме того, жесткость JDS, вероятно, будет выше, чем у гармонического привода из-за его жестких компонентов зубчатой передачи, в отличие от гибкости гармонического привода. Увеличение жесткости JDS и плотности крутящего момента может быть достигнуто за счет добавления большего количества планет в сборку JDS. Это стало возможным благодаря его конструкции без носителя, которая ослабляет кинематические ограничения на механизм, чтобы принимать больше планет.Наконец, концепция JDS — это попытка численно оптимизировать систему привода робота, которая состоит из двигателя, трансмиссии и несущей конструкции, тогда как гармонические приводы являются дискретными элементами передачи.
управление трансмиссией с гармонической передачей.Кроме того, поскольку конструкция JDS может поддерживать высокие передаточные числа, она не допускает движения задним ходом и не требует фиксирующего тормоза на валу двигателя при больших передаточных числах, как в случае большинства аппаратных средств космического привода. Кроме того, жесткость JDS, вероятно, будет выше, чем у гармонического привода из-за его жестких компонентов зубчатой передачи, в отличие от гибкости гармонического привода. Увеличение жесткости JDS и плотности крутящего момента может быть достигнуто за счет добавления большего количества планет в сборку JDS. Это стало возможным благодаря его конструкции без носителя, которая ослабляет кинематические ограничения на механизм, чтобы принимать больше планет.Наконец, концепция JDS — это попытка численно оптимизировать систему привода робота, которая состоит из двигателя, трансмиссии и несущей конструкции, тогда как гармонические приводы являются дискретными элементами передачи.
Как построены промышленные роботы? Руководство по компонентам и движению рук роботов | XYZ
Одинаковы ли строения роботов и людей?
У роботов и людей есть общая черта. Люди и механические роботы — какими бы противоположными они ни казались, на самом деле они имеют одну и ту же основную структуру звеньев (костей) и суставов.Основной каркас промышленных роботов, состоящий в основном из роботов-манипуляторов, представляет собой комбинацию звеньев и шарниров. По отношению к человеческому телу части, которые могут свободно сгибаться и двигаться, такие как локоть и плечо, являются суставами, а кости, соединяющие эти суставы, эквивалентны звеньям робота. Принцип движения суставов и передачи энергии по связям распространен как у людей, так и у роботов.
Локоть и плечо человека — это суставы, а соединяющие их кости — звенья.
Роботы условно подразделяются на два типа в зависимости от того, как расположены их связи: 1) последовательная связь и 2) параллельная связь. Человеческая рука классифицируется как последовательное звено, поскольку ее суставы — плечо, рука и запястье — выровнены последовательно.
Человеческая рука классифицируется как последовательное звено, поскольку ее суставы — плечо, рука и запястье — выровнены последовательно.
Промышленные роботы подразделяются на несколько категорий, таких как вертикальный шарнирный тип и горизонтальный шарнирный тип (робот для сборки с избирательным соответствием Arm-SCARA), в зависимости от движений суставов и конструкции.Пожалуйста, прочтите статью ниже для получения дополнительной информации.
Какие бывают виды промышленных роботов? Руководство по характеристикам основных 6 типов
В этой статье будет объяснено движение и внутреннее устройство промышленных роботов.
Сравнение движений роботов и людей
Теперь давайте посмотрим на движение вертикального шарнирного типа, имеющего ту же механическую структуру, что и человеческая рука, в качестве примера.
Вертикальный шарнирно-сочлененный робот — это промышленный робот с последовательной связью.Обычно он состоит из шести шарниров (6 осей).
На следующем рисунке показано сравнение движения робота и человека.
Оси с 1-й по 3-ю — это поясница и рука, а оси с 4-й по 6-ю — от запястья до кончиков пальцев. Первые три оси перемещают запястье в определенное положение, а следующие три оси перемещают запястье свободно. Эта 6-осевая конструкция позволяет роботам свободно перемещаться, как и люди.
Давайте проверим реальные движения с помощью видео.
Все топоры, от первой до шестой, двигаются как человеческие.
Что требуется для перемещения суставов?
Теперь давайте подробно рассмотрим внутреннюю структуру промышленных роботов.
На приведенном ниже рисунке показана структура универсального робота с полезной нагрузкой для малых и средних грузов «R series» от Kawasaki Heavy Industries или Kawasaki. Эта серия R используется в широком диапазоне областей, таких как сборка электронных устройств и дуговая сварка.Поскольку кабели и жгуты могут быть встроены внутри руки, можно избежать помех для периферийного оборудования, и робот может работать в ограниченном пространстве. Его отличительная черта — быстрая работа, которая может соответствовать резким движениям.
Эта серия R используется в широком диапазоне областей, таких как сборка электронных устройств и дуговая сварка.Поскольку кабели и жгуты могут быть встроены внутри руки, можно избежать помех для периферийного оборудования, и робот может работать в ограниченном пространстве. Его отличительная черта — быстрая работа, которая может соответствовать резким движениям.
На этой иллюстрации видно, что робот состоит из множества различных частей. Среди этих частей четыре особенно важных: привод, редуктор, энкодер и трансмиссия, каждая из которых будет объяснена отдельно.
Привод
Привод — это компонент, который функционирует как шарнир робота, который позволяет роботу перемещать руку вверх и вниз или вращаться, а также преобразует энергию в механические движения. Может быть трудно понять эту концепцию, но подумайте о двигателях в качестве примера. Точки, отмеченные красными кружками на рисунке ниже, представляют собой положение двигателей серии R.
Однако, если это простой двигатель, такой как те, что используются в наборах пластиковых моделей, невозможно выполнить точную работу, требующую точных движений и точности 0.01мм, например. Поэтому для промышленных роботов используется высокофункциональный двигатель, называемый серводвигателем, который может управлять положением и скоростью.
Наиболее распространенным источником энергии для приводов является электричество, но также можно использовать гидравлическую и пневматическую энергию. Некоторые приводы с гидравлическим приводом уникальны тем, что они могут генерировать большую мощность и обладают ударопрочностью.
Редуктор
Редуктор — это устройство для увеличения мощности двигателя.Один только двигатель ограничен по мощности, которую он может выдать. Для выработки большой мощности двигатели в основном используются в сочетании с этим редуктором. Области, обведенные синим кружком на следующем рисунке, представляют собой редукторы.
Если вы объедините шестерни с разным числом передач и уменьшите вращение двигателя в 10 раз, мощность двигателя будет умножена на 10. Это тот же принцип, что и велосипедная трансмиссия. Велосипеды имеют шестерни разного размера на переднем и заднем колесе.Обычно трансмиссия используется для переключения передач заднего колеса. Когда выбрана большая передача и количество оборотов колес сведено к минимуму, педалирование становится проще за счет скорости, но даже езда по крутым холмам становится намного проще. Другими словами, можно увеличить выходную мощность.
Кодировщик
Энкодер — это устройство, которое указывает положение (угол) вала вращения двигателя. Имея кодировщик, он может предоставить ощутимые данные о том, в каком направлении и сколько движется робот.Обычные оптические энкодеры имеют диск, прикрепленный к вращающемуся валу двигателя. Диск имеет прорези через равные промежутки времени, чтобы пропускать свет, и с обеих сторон диска расположены светодиоды (LED) и светоприемные элементы (фотодиоды) для различения интенсивности света (светлый и темный).
Когда двигатель вращается, свет либо проходит через щели, либо блокируется, поэтому угол поворота и скорость можно определить, считывая сигналы. Это позволяет серводвигателям точно контролировать положение и скорость.
Трансмиссия
Трансмиссия — это компонент, передающий мощность, вырабатываемую приводами и редукторами. Трансмиссия также может изменять направление и величину мощности. Рассматривая велосипед в качестве примера, как и раньше, цепь, которая соединяет кривошип с задним колесом, является трансмиссией. Велосипеды приводятся в движение, принимая вращательное движение от педалей и передавая его на заднее колесо с помощью трансмиссии.
Эта идея также применима к конструкции робота.Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов с помощью механизмов передачи, таких как ремни и шестерни. Например, в запястье роботов серии R, поскольку двигатель может быть установлен на локтевой части руки с помощью механизма проводимости, возможно компактное запястье.
Добавление функций с помощью сменного концевого эффектора
Люди могут выполнять различные задачи с помощью инструментов. В случае с промышленными роботами замена устройства, прикрепленного к их запястью, делает роботов очень универсальными и позволяет им выполнять самые разные работы.Это устройство называется «концевым эффектором», и существует огромное количество их, готовых к использованию, включая руки для подъема предметов, вакуумные (всасывающие) типы, а также инструменты для сварки и покраски. Робот может выполнять очень широкий спектр работ, сочетая гибкое движение, обеспечиваемое валами робота, и концевыми эффекторами, ориентированными на конкретную задачу.
В этой статье подробно описана базовая структура промышленных роботов, и с ее помощью мы узнали о компонентах, из которых состоит конструкция, — где они расположены и какую роль они играют.Люди могут подумать, что нет необходимости знать или изучать, как устроен робот, при рассмотрении вопроса о внедрении роботов на рабочем месте. Тем не менее, наличие общего обзора поможет упростить определение таких вещей, как возможные виды движений и работ, если посмотреть на количество осей, которые имеет робот, или на то, как робота можно использовать в компании. Для компаний, желающих получить инструкции, подробная информация о каждом промышленном роботе и примеры применения доступны на веб-сайте Kawasaki Robot Division.
Промышленные роботы для гибкой автоматизации
Видео о роботизированных приложениях
Когда дело доходит до фактического рассмотрения установки роботов, даже небольшое знание структур и движений промышленных роботов может иметь большое значение и привести к более подходящей реализации.
Робот-манипулятор с пятью шестью степенями свободы
Я начал проект манипулятора-робота, и мои первые шаги, потому что я очень хочу начать, — это разработка совместных приводов. Мой план — рука 5R, что означает, что он будет состоять из 5 поворотных шарниров, каждый из которых добавит руке одну степень свободы.
Мой план — рука 5R, что означает, что он будет состоять из 5 поворотных шарниров, каждый из которых добавит руке одну степень свободы.
Я должен начать с теории | либо параметров DH, либо экспоненциальных произведений, чтобы решить прямую кинематику проблема, но я хочу начать с дизайна, поэтому естественное место для начала — это исполнительный механизм. Я хотел создать единый стык.
Приводы манипулятора робота медленнее и требуют большего крутящего момента по сравнению с размером машины, чем другие приложения, такие как двигатели электромобилей.Я смотрел много видео на Youtube и проводил исследования по различным конструкциям коробок передач. Есть несколько разных подходов к понижению передачи двигателя, но поскольку я хочу использовать шаговые двигатели, мне нужно более высокое передаточное число, чтобы увеличить эффективный удерживающий момент и разрешение. Типичное передаточное число прямой передачи не дает мне необходимого уменьшения. Я изначально думал про дифференциальный привод, очень хотелось Skyentific , который представляет собой два шарнирных соединения, расположенных друг над другом: шарнирное соединение.Преимущества этого в том, что я могу переместите двигатели ближе к основанию, уменьшив крутящий момент, необходимый для перемещения рычага, но сложность, связанная с созданием дифференциала привод, особенно с 3D-печатной передачей, по-видимому, не нужен. Я обратился к другим методам.
Следующим очевидным выбором будет планетарный редуктор. Обычно они предлагают множество вариаций и позволяют использовать несколько различных входных и выходных данных. баллы для высоких передач.Некоторое время я серьезно обдумывал это, но попытался распечатать коробку передач из thingiverse , но величина трения шестерен, обеспечивающая жесткие допуски и низкий люфт, к сожалению, была неприемлемой, поэтому я оставил поиск.
Большинство современных роботов используют редуктор, известный как редуктор с волновым напряжением, который основан на гибком шлице. внутри кругового шлица для создания высокого передаточного отношения. Они тихие, компактные и предлагают невероятно большие редукции с очень небольшим люфтом, но они
трудно изготовить на 3D-принтере, а именно гибкую шлицевую шпонку.Есть реализует напечатанные на 3D-принтере приводы волн деформации , но существуют и другие аналогичные методы, основанные на аналогичном принципе, которые предлагают меньшую сложность.
внутри кругового шлица для создания высокого передаточного отношения. Они тихие, компактные и предлагают невероятно большие редукции с очень небольшим люфтом, но они
трудно изготовить на 3D-принтере, а именно гибкую шлицевую шпонку.Есть реализует напечатанные на 3D-принтере приводы волн деформации , но существуют и другие аналогичные методы, основанные на аналогичном принципе, которые предлагают меньшую сложность.
Эпициклоидные или циклоидальные приводы — это еще одна форма коробки передач, в которой используется различие зубцов между внутренней и внешней секциями. Внутренняя шестерня — эпиоциклоида, это форма, которую вы получите, когда начнете рисовать точку на круге, катящемся по внешней стороне другого круга. Это действительно сбивающее с толку описание, но хорошее анимацию этого можно найти в Вольфраме.com .
На фото моя первая попытка создать циклоидальную коробку передач. Обычно циклоидальная шестерня (желтая) является вращающейся частью коробки передач, но в этом случае проницательный может заметить винты, которые проходят сквозь
отверстия в шестерне. Они должны удерживать его на месте. Зачем мне это делать? Хороший вопрос! Меня вдохновил Пол Гулд на Hackaday. Основной принцип следующий (простите, если что-то не так, я всего лишь инженер-электрик :)).Кликлоидальная передача приводится в движение эксцентриковой осью, приводимой в движение двигателем. Это толкает циклоидальную шестерню на один шаг на внешние штифты при каждом повороте внутренней оси, что
Вот как циклоидальная коробка передач достигает такого высокого передаточного числа в таком небольшом форм-факторе. Теперь представьте, что вы ограничиваете это движение ровно настолько, чтобы он мог завершить свой полный ход, но вместо вращения
шестерня вместо этого отводится назад, что, в свою очередь, натягивает штифты. Это движение оказывает давление на внешнюю оболочку коробки передач.Что это обозначает? Дело в том, что вокруг центра вращается внешняя оболочка, а не циклоидальная шестерня.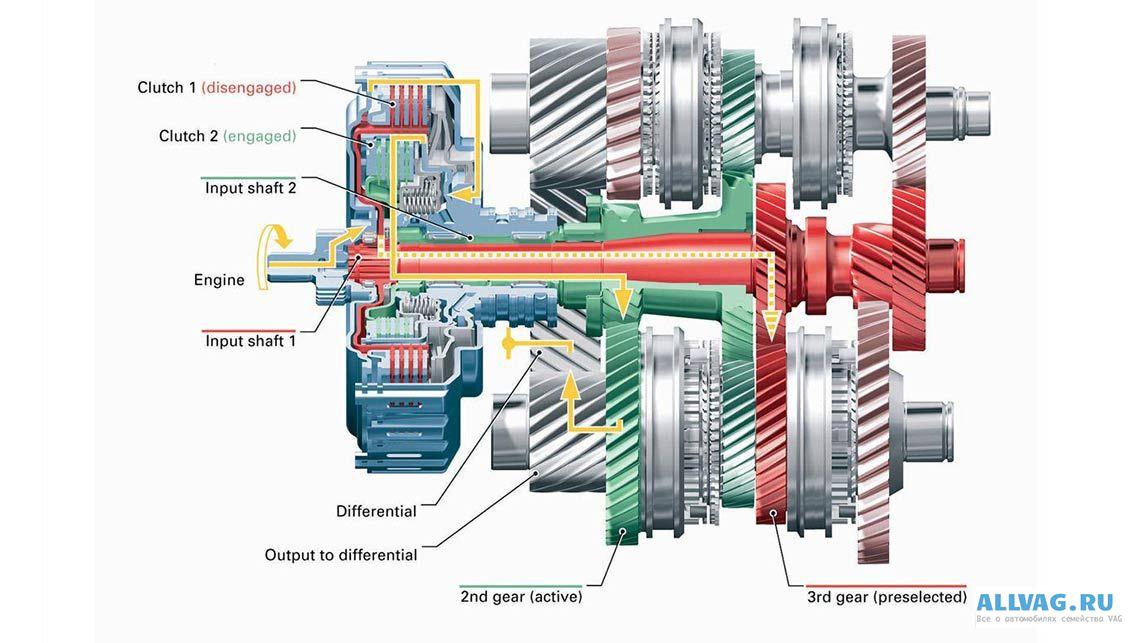
Почему это важно? Это означает, что я могу установить что-то на внешнюю часть коробки передач, а не на ее конец, что важно для сохранения ширины привода. до минимума. Сведение к минимуму размера привода важно, потому что он находится на плече, который, по сути, представляет собой гигантский рычаг момента на нижних суставах. Итак, имея это в виду, что я узнал в этой первой реализации?
90 мм — действительно большой диаметр для настольного манипулятора робота.Я искал размеры примерно
размер моего кулака чуть меньше, чем обычная кофейная кружка. Эта штука размером с идеальную кружку для любителей кофеина рано утром.
Вы знаете, кто вы (я полностью уверен).
Отверстия для шурупов не следует печатать точно того же размера, что и шуруп, для которого они предназначены. Я потратил около пяти минут, пытаясь связать
винт M3 x 50 мм через пластиковое отверстие, достаточное для этого.Я закончил тем, что выбил дыру (победа?).
Мне нужно измерить, прежде чем покупать слишком короткие винты. Опять же, я должен также измерить для печати достаточно большого пластика, чтобы винты не выходили на дно.
до того, как голова доберется до пластика. Я все еще не совсем уверен, как это сделать, когда еще не знаю длину ниток в шаговом двигателе.
Коробка передач | Урок | Академия роботов
Практически все электродвигатели используются вместе с коробками передач.Причина этого в том, что электродвигатели развивают относительно низкий крутящий момент. Они не особо сильные. Однако они способны очень быстро вращаться. Таким образом, мы можем использовать коробку передач, чтобы найти компромисс между скоростью и крутящим моментом. Конечно, бесплатного обеда не бывает, а коробка передач вносит некоторую неэффективность, есть некоторую потерю мощности. Эта потеря мощности связана с тепловым и акустическим шумом.
Если вы используете велосипед, вы, вероятно, хорошо знакомы с концепцией передачи. Электродвигатели могут вращаться очень-очень быстро, но они не развивают большой крутящий момент, они слабые.
Электродвигатели могут вращаться очень-очень быстро, но они не развивают большой крутящий момент, они слабые.
Теперь это немного похоже на езда на велосипеде в гору. Вы хотите изменить большое количество оборотов педалей, чтобы уменьшить нагрузку, которую вы должны оказывать на эти педали. Вы жертвуете большой скоростью ради большого крутящего момента.
Для электродвигателя это то же самое, что и для велосипеда, у вас есть маленькая звездочка спереди на педалях, а у вас есть звездочка большего размера на заднем колесе. Таким образом, на каждый оборот электродвигателя приходится только половина оборота выходного вала редуктора двигателя.Таким образом, двигатель вращается довольно быстро, выходной вал вращается довольно медленно, но крутящий момент двигателя увеличивается за счет передаточного числа.
Вот двигатель с одноступенчатым редуктором. Мы называем это редуктором, потому что за каждый оборот двигателя выходной вал поворачивается меньше одного раза. Когда мы говорим о двух сторонах коробки передач, мы называем ее стороной двигателя, которая обозначена индексом M, а сторона нагрузки — индексом L. Передаточное число коробки передач — заглавная G, и это соотношение числа зубьев на зубчатом колесе. большое колесо к числу зубцов на маленьком колесе.А для понижающей коробки G больше единицы.
Выходная скорость омега L равна 1 на G, умноженном на омега N. Таким образом, скорость выходного вала ниже скорости двигателя. Выходной крутящий момент tau L равен G, умноженному на крутящий момент двигателя tau M, поэтому выходной крутящий момент больше крутящего момента двигателя. Это фундаментальные уравнения, описывающие характеристики коробки передач. Он снижает скорость и увеличивает крутящий момент.
Робототехника
С использованием линии передачи с оконечной нагрузкой QWiC (Quasi-Wireless Capacitive).Отражено
мощность может использоваться последовательно подключенными нагрузками.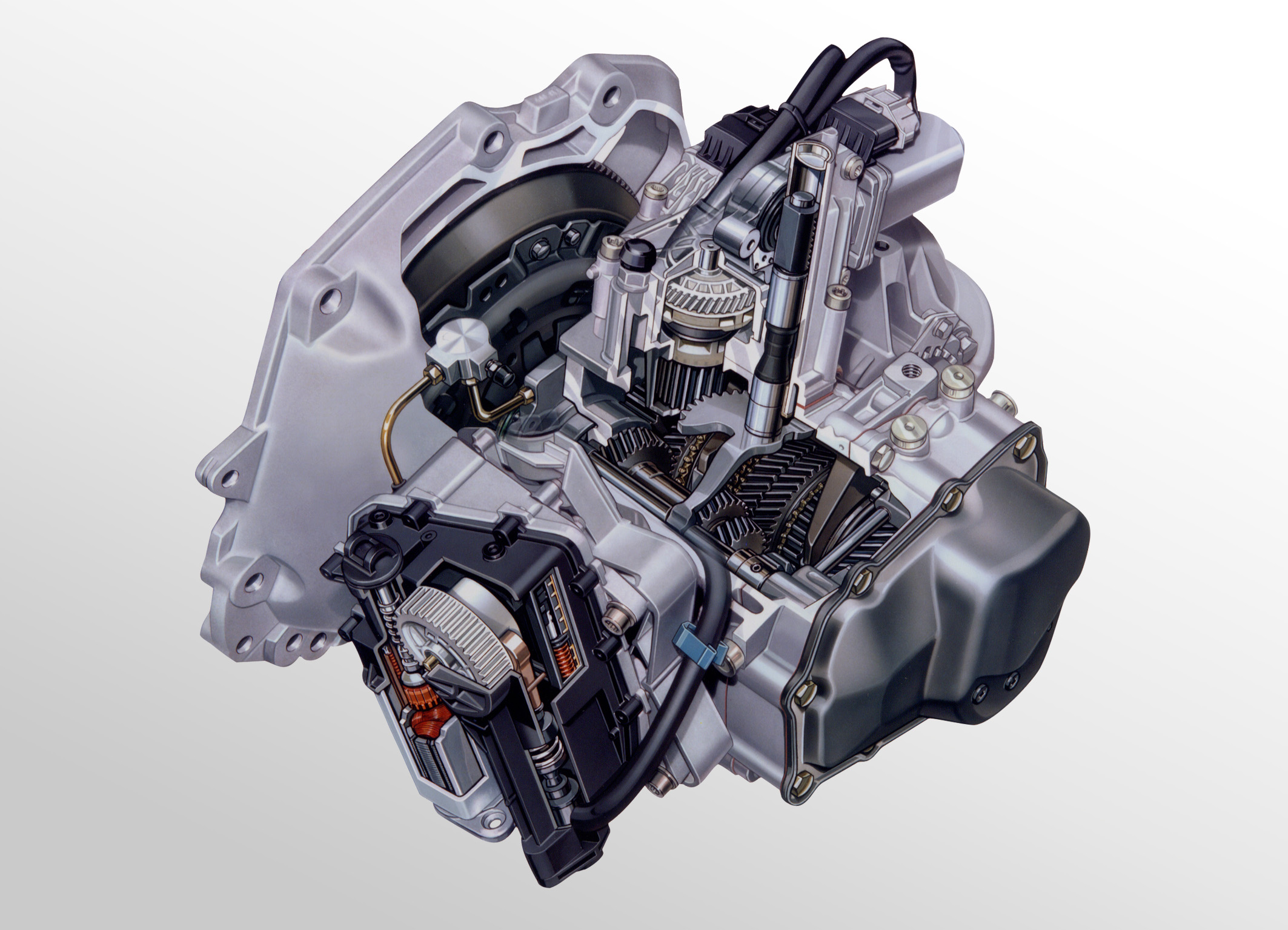 Это позволяет использовать прекращение
катушка в качестве последовательного заземления.
Это позволяет использовать прекращение
катушка в качестве последовательного заземления.
Улучшенная модульность
С помощью этого метода можно создавать модульные робототехнические системы с необходимостью последовательное соединение от одного модуля к другому.Данные о местоположении для каждого модуля будут передаваться по той же линии, что и мощность.
Ограничения конструкции
Механические и электрические
Для однопроводной конфигурации требуется двигатель постоянного тока с высоким сопротивлением. Специально спроектированный полный мостовой выпрямитель используется для преобразования переменного тока в постоянный ток в линии передачи.
Чтобы использовать двигатель с высоким импедансом в качестве сервопривода для манипулятора робота, специальный драйвер двигателя, и систему управления нужно было разработать. Кроме того, линия передачи имела добавлено требование о разрешении подключения линии передачи через сервопривод.
Платформа разработки
Полная модульность
Предполагаемое использование этой системы — создание всей платформы разработки, способной
последовательное питание нескольких нагрузок без немедленного возврата на землю.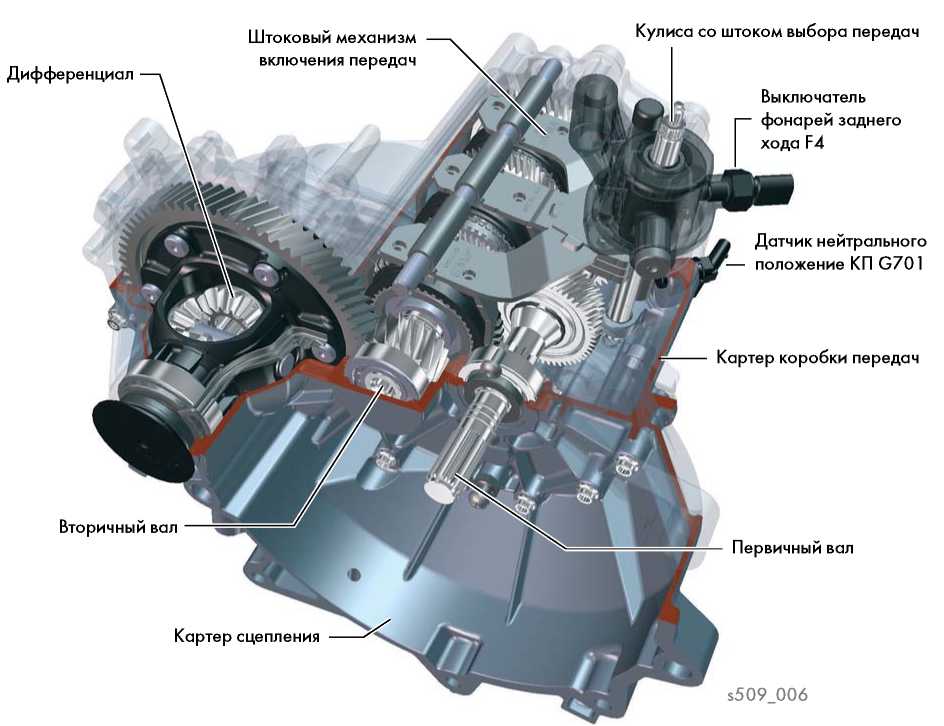 Каждый модуль будет
иметь возможность быстро подключиться к ЛЭП. Будущие разработки могут
включить автономную роботизированную сборку.
Каждый модуль будет
иметь возможность быстро подключиться к ЛЭП. Будущие разработки могут
включить автономную роботизированную сборку.
Интеграция системы QWiC
Конечная цель этой системы — работать на поверхностях QWiC, позволяя сервоприводам для развертывания в любом месте на проводящей поверхности.
Полуавтоматическая коробка передач — устройство и принцип работы. Роботизированная коробка передач
Большинство современных автопроизводителей предоставляют покупателю возможность выбрать полуавтоматический тип устанавливаемой коробки передач, хотя массовое внедрение такой трансмиссии началось еще в 1930-х годах. Несмотря на солидный возраст, у полуавтоматической коробки передач до сих пор нет явных противников или поклонников.
По мнению специалистов, это связано с плохим пониманием его устройства и принципа действия. Чтобы обеспечить условия для переключения передач, водителю автомобиля с полуавтоматической коробкой передач достаточно снять ногу с педали газа. Он обеспечивает наиболее оптимальные условия работы мотора при движении автомобиля, что не только продлевает срок его службы, но и снижает расход топлива.
Устройство коробчатое полуавтоматическое
В любом полуавтомате сразу два механизма сцепления — это главное отличие такой системы от классической механической коробки передач.Самая распространенная схема работы таких полуавтоматов — взаимодействие механизмов только с определенной группой имеющихся передач, которые могут быть четными или нечетными. Такое расположение позволяет значительно сократить время, затрачиваемое на переключение, а также увеличивает наглядность и плавность этого процесса.
На практике это выглядит следующим образом. Когда машина движется, система анализирует информацию со всех датчиков и других систем. На основании полученной информации при уже включенной передаче полуавтоматическая коробка передач заранее готовится включить следующее.Это происходит сразу после определенных условий. В результате удалось сократить время переключения до 8 миллисекунд — такими показателями может похвастаться далеко не каждый современный автомат.
Полуавтомат, принцип действия которого достаточно сложен, отличается наличием массы электронных систем, учитывающих многочисленные параметры при управлении автомобилем, в котором педаль сцепления отсутствует за ненадобностью. Все внутренние механизмы должны работать синхронно и очень четко — именно в этом случае достигается высокое удобство при управлении таким автомобилем.Водитель может самостоятельно регулировать работу такой коробки с помощью специальных переключателей, обычно расположенных под рулевым колесом. Сегодня уже известно несколько вариаций таких коробок — окончательный дизайн будет зависеть от автопроизводителя. О типах ящиков рассказано в видео:
Достоинства и недостатки полуавтоматических коробок
Как показывает практика, из одних достоинств нельзя заключить — любой узел в автомобиле имеет определенные недостатки. К неоспоримым преимуществам полуавтоматов перед МКПП можно отнести:
- максимальный комфорт для водителя;
- отличные динамические характеристики автомобиля при разгоне;
- использование всех возможностей двигателя, что также увеличивает его динамику;
- ряд модификаций таких боксов отличается компактностью, что немаловажно для малолитражных автомобилей; У
- отмечено снижение расхода топлива не только за счет самой коробки, но и за счет возможности установки менее мощных моторов.
Из основных недостатков полуавтоматических ящиков можно назвать такие:
Автомат или полуавтомат — что надежнее
Многие водители, покупающие новую машину, до последнего не могут определиться — что им больше нравится.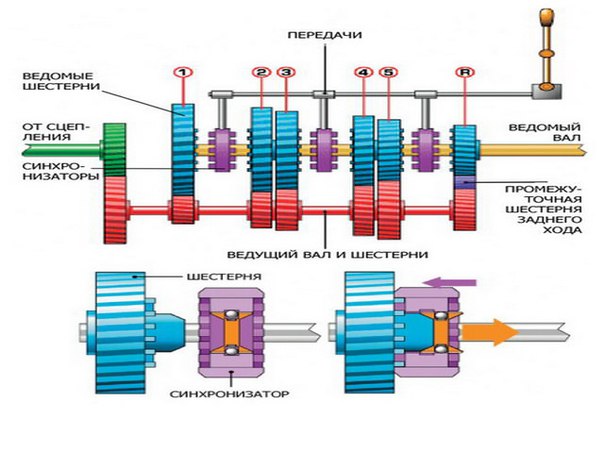 Многие считают машину более современной, надежной и простой в использовании, но на самом деле все это далеко от истины. Полуавтоматическая коробка передач, по сути, представляет собой отработанную десятилетиями механику, оснащенную современными дополнительными системами — автоматическим выключателем сцепления и системой переключения передач.Во время движения блок управления такого бокса «ориентируется» не только на заложенные в него алгоритмы работы, но и принимает сигналы от водителя и других датчиков автомобиля.
Многие считают машину более современной, надежной и простой в использовании, но на самом деле все это далеко от истины. Полуавтоматическая коробка передач, по сути, представляет собой отработанную десятилетиями механику, оснащенную современными дополнительными системами — автоматическим выключателем сцепления и системой переключения передач.Во время движения блок управления такого бокса «ориентируется» не только на заложенные в него алгоритмы работы, но и принимает сигналы от водителя и других датчиков автомобиля.
отличается повышенной надежностью и, в отличие от машины, позволяет экономить на топливе, так как снижает его расход. Поскольку установка полуавтомата обходится автопроизводителю дешевле, для покупателя снижается стоимость автомобиля. Количество серьезных поломок у полуавтоматических коробок также значительно меньше, и их намного проще ремонтировать, чем у станка.В итоге получается, что полуавтомат позволяет не только сэкономить на покупке автомобиля, но и снижает расходы на его эксплуатацию.
Принцип работы коробки полуавтомата
Вся работа механической части такой коробки практически идентична «действиям» механической. Существенные отличия наблюдаются в наличии электронной составляющей, определяющей весь существующий комфорт езды. За управление этой сложной системой отвечает специальный блок, содержащий все алгоритмы, необходимые для эффективного переключения передач.При этом во время работы он может учитывать информацию, поступающую от существующих в автомобиле систем и самого водителя. Это обеспечивает непревзойденную точность и эффективность управления переключением передач.
Несмотря на наличие в коробке достаточного количества электронных систем, основную работу при переключении передач выполняют ее стальные механические части, которые принимают на себя основную нагрузку. Учитывая, что вся электроника надежно защищена, полуавтоматическая коробка имеет огромный ресурс работы. Единственное условие — обслуживаются только профессиональные механики — их неправильные действия могут привести к тому, что машина попытается «тронуться сама», например, со светофора на оживленном перекрестке. В результате оказывается, что полуавтоматическая коробка передач, безусловно, является наиболее оптимальным способом обеспечить переключение передач в автомобиле.
Единственное условие — обслуживаются только профессиональные механики — их неправильные действия могут привести к тому, что машина попытается «тронуться сама», например, со светофора на оживленном перекрестке. В результате оказывается, что полуавтоматическая коробка передач, безусловно, является наиболее оптимальным способом обеспечить переключение передач в автомобиле.
Сегодня существует множество разновидностей коробок передач — и речь идет не только об автоматических коробках передач — даже такие простые по конструкции «ручки» сегодня имеют разные подвиды и надстройки.Но прежде чем мы перейдем реку знаний об этом броде, давайте четко разберемся, что такое коробка передач и для чего она нужна!
Как работает коробка передач?
Коробка передач в автомобиле (или любом другом механическом транспортном средстве) — это рычажная (с точки зрения физики) пошаговая система, которая буквально передает энергию от колес, то есть силу, которую двигатель создает для Привод колес сначала проходит через специальную систему, называемую коробкой передач (или обычным сокращением — коробкой передач).Образно, а часто и физически коробка передач находится между двигателем и ведущими колесами — это своего рода посредник в процессе, который заставляет автомобиль двигаться, и это просто в случае с механической коробкой передач или вариатором (подробнее об этом ниже ) и сложно почти во всех остальных случаях со стороны машины … Обычно.
Чтобы пояснить логику работы КПП, вспомним школьную программу по физике — рычажную систему. Помните, учитель, скорее всего, привел в пример строительство знаменитых египетских пирамид, когда строителям приходилось поднимать тяжелые камни на большую высоту.Или вы вспоминаете о рычаге из известной фразы его первооткрывателя Архимеда: «Дайте мне точку опоры, и я поверну Землю!». Его суть заключалась в том, что, например, если вы возьмете длинную палку (это будет рычаг), поместите ее посередине на опоре, повесите груз на одну сторону, а другой рукой держите, чтобы опустить и тем самым поднять другой конец с грузом, чем дальше точка опоры будет от вас, тем легче будет поднять груз (меньше усилий для приведения рычага в движение), но тем большее расстояние пройдет ваша рука вместе с концом палка, за которую она держится. И наоборот — чем ближе вы перемещаете точку опоры, тем больше силы вы должны приложить, чтобы переместить конец палки, но тем больше вы перемещаете груз (и, кстати, на большую высоту).
И наоборот — чем ближе вы перемещаете точку опоры, тем больше силы вы должны приложить, чтобы переместить конец палки, но тем больше вы перемещаете груз (и, кстати, на большую высоту).
Фактически, рычажная система применяется вокруг нас почти везде — даже внутри нас — наши челюсти, множество изгибов тела — все это работает на системе рычагов. В повседневной жизни примеры включают плоскогубцы, тачку для перевозки сыпучих материалов, классические открывалки для бутылок и даже ножницы. И, конечно же, коробка передач в нашей машине.
Но, пожалуй, принцип работы системы навески в коробке передач автомобиля легче всего будет понять на примере велосипеда, сравнив две их разновидности: классический советский односкоростной велосипед и современный горный хардтейл с возможностью переключения. шестерни. В односкоростном велосипеде у вас всегда будет одинаковое соотношение частоты педалирования и скорости ведущего (заднего) колеса, а это значит, что, например, вам просто не хватит сил, чтобы подняться на крутой холм, потому что вы не сможете с такой силой давить на педали.С другой стороны, на большой скорости, возможно, вы могли бы еще быстрее разогнать этот «чугунный» байк, но вы не сможете так быстро двигать ногами, хотя у вас хватило бы сил.
Но велосипед с возможностью переключения скоростей решает вышеперечисленные проблемы: он использует те же рычаги, но нам это не знакомо, как описано выше — роль рычагов играют звездочки: хозяева и подчиненные, которые на скоростном велосипеде представляют собой целый набор — обычно несколько (2-3) ведущих разного размера, а последователи (от 6 до 10) — тоже разного размера.И так, перебирая различные ведущие и ведомые звездочки, перекидывая цепь, меняем передачи и, соответственно, силу и скорость ее вращения, необходимые для раскрутки колеса.
Итак, если мы выберем самую маленькую ведущую звездочку и самую большую ведомую, мы получим самую низкую передачу и наименьшее передаточное число (подробнее об этом ниже), когда нам нужно крутить педали много раз, чтобы колеса сделали хотя бы один оборот — другими словами, активно крутя педали, мы все равно будем ехать очень медленно, но потом сможем подняться на самый крутой холм. Но если поступить наоборот — выбрать высшую передачу, то цепь будет перекинута через самую большую ведущую звезду (где педали) и наименьшую ведомую, поэтому нам нужно сделать всего 1 оборот педали, чтобы колеса несколько раз повернулись и наш байк, соответственно, очень быстро поехал.
Но если поступить наоборот — выбрать высшую передачу, то цепь будет перекинута через самую большую ведущую звезду (где педали) и наименьшую ведомую, поэтому нам нужно сделать всего 1 оборот педали, чтобы колеса несколько раз повернулись и наш байк, соответственно, очень быстро поехал.
На самом деле коробки передач в автомобиле работают точно так же, но в автомобиле нет коробки, которая работала бы как велосипед — с набором звездочек и цепью, соединяющей их.А у автомобиля, как правило, гораздо меньшее количество возможных передач — обычно от 4 до 8 — чем старше коробка передач, тем, как правило, меньше передач, и чем она новее, тем их больше; Кроме того, чем быстрее должна ехать машина, тем больше будет передач — мы говорим об автомобилях. Но в грузе может быть 10 и даже больше передач. А есть коробки вообще без четкого набора передач — точнее, их количество в машине бесконечно — речь идет о вариаторе.
Итак, какие бывают коробки передач и чем они отличаются друг от друга? Начнем с основных и (пока что) наиболее распространенных вариантов коробки в современном автомобиле.
Механическая коробка передач
Также известен как «ручка» или «механика», как указано выше. Этот тип требует от водителя максимальных движений тела при разгоне или замедлении автомобиля, нужно постоянно нажимать педаль сцепления, а затем вручную переключать передачи с помощью рычага переключения передач в центральной части салона под панелью. Большинство современных автомобилей с механической коробкой передач имеют от пяти до шести скоростей, не считая задней передачи. Это самый старый и простой вид коробки передач — в первые годы зарождения автомобилей все автомобили оснащались механической коробкой передач.
В целом устройство механической трансмиссии достаточно простое, эффективное и позволяет водителю иметь прямой контроль над автомобилем, за что механики любимы отдельной категорией водителей, которые всегда любят управлять динамикой автомобиля. С другой стороны, руководство всегда требует работы одной рукой, особенно в городе. Также требуются определенные навыки и немного практики, чтобы умело владеть механической коробкой передач и особенно плавно отпускать педаль сцепления.
С другой стороны, руководство всегда требует работы одной рукой, особенно в городе. Также требуются определенные навыки и немного практики, чтобы умело владеть механической коробкой передач и особенно плавно отпускать педаль сцепления.
Вместо звездочек роль рычагов в МКПП выполняют шестерни разного размера, а вместо цепи эти шестерни непосредственно контактируют друг с другом зубьями по краям.С помощью рычага переключения передач мы просто переключаем передачи друг на друга, изменяя размеры совместно работающих ведущей и ведомой шестерен. На рисунке ниже вы можете увидеть примерную схему 7-ступенчатой механической коробки передач.
При этом во время переключения нам нужны две очень важные вещи, которые являются незаменимыми спутниками любой современной механической трансмиссии: сцепление, потому что во время переключения рабочий двигатель должен быть отключен от коробки, и синхронизатор, потому что шестерни движутся. на высокой скорости не всегда можно соединить так, чтобы пазы зубцов совпали.
АКПП
Типовая автоматическая коробка передач
Раньше большинство автоматических трансмиссий имели три передачи (плюс задний ход), и если у вашего автомобиля было четыре передачи, то у вас был настоящий спортивный автомобиль или роскошный седан. 4-ступенчатые АКПП сегодня тоже редкость, на современных машинах АКПП имеют до восьми передач и по расходу топлива и динамике не уступают своим более простым собратьям.
Все машины должны иметь специальные микрочипы (обычно называемые «мозгами», которые являются частью бортового компьютера автомобиля и будут управлять порядком переключения на определенных скоростях и даже в зависимости от стиля вождения человека, управляющего автомобилем.
Вот два основных типа коробок передач, которые сегодня используются в подавляющем большинстве автомобилей. Теперь посмотрим на менее распространенные виды контекстной рекламы — одни из них набирают популярность, другие — наоборот, теряют.
Роботизированная коробка передач (робот, типтроник)
По мере того, как компьютеры с каждым днем все глубже и глубже проникают в каждую систему автомобиля, автоматическая коробка передач получила новые возможности. Как мы уже упоминали ранее, современные автоматы теперь имеют до восьми передач, а время и условия включения той или иной передачи выбираются компьютером, и никто не спрашивает человека, что является огромным минусом для многих водителей, особенно, в спорте и / или.В то же время при спокойной, расслабленной езде по городу автомат предпочтительнее. Чтобы объединить лучшее из обоих этих миров, производители автомобилей предоставили водителям возможность использовать гибридную версию коробки передач в своем автомобиле, что позволяет управлять переключением передач вручную, используя либо специальный селектор с двумя фиксированными положениями переключателя передач. рычаг переключения передач: плюс и минус, каждый из которых отвечает за переключение передач на одну большую или одну меньшую соответственно; или с помощью «лепестков» на рулевом колесе: справа и слева, каждый из которых отвечает за одну и ту же функцию.Лепестки (или «весла») чаще всего встречаются в спортивных автомобилях, но в обычных они появляются чаще.
Лепестки ручного переключения передач и кнопочной системы режимов коробки передач автомобиля Lotus Evora
Следует иметь в виду, что водители всегда могли управлять автоматической коробкой передач в той или иной степени с помощью так называемых «понижающих передач», но в действительности это не было полным контролем переключения передач по двум причинам:
- Чаще всего пониженные передачи означали, что можно ограничить переключение только первой или второй (реже — третьей) передачей — т.е.е. автомобиль просто не переключится на передачу выше выбранной. Но, например, вы не сможете заставить «чистую» машину переключаться ниже пятой передачи.
- Даже если вы переведете рычаг автоматической коробки передач в режим «L» — не переключайтесь выше первой передачи, машина все равно будет переключаться, если скорость автомобиля поднимется слишком высоко (например, если автомобиль съезжает с крутого холма — для которые собственно и нужны в автомате понижающие передачи) чтобы не повредить коробку.

Классический автомат с пониженными передачами (слева) и робот с ручным переключением передач (справа)
Теперь в типтронике компьютер в значительной степени управляет механической коробкой, избавляя водителя от необходимости постоянно выжимать сцепление, но в то же время этот водитель всегда может переключиться в полностью автоматический режим переключения.
вариатор (вариатор)
Если вы когда-нибудь ездили на небольшом современном скутере, то вы знакомы с вариатором или бесступенчатой трансмиссией. Это очень простое устройство, но оно хорошо работает практически в любых условиях (если только оно не несовместимо с достаточно мощными двигателями). По сути, вариатор состоит из двух шкивов, соединенных ремнем (как на велосипеде из описания в начале статьи, только вместо шестерен — шкивы). Но это специальные шкивы, так как они могут изменять свой размер и, таким образом, изменять передаточное число в коробке автомобиля.Вариатор не имеет определенного количества «передач», потому что он может выбрать точное соотношение размеров обоих шкивов между его самым низким и самым высоким передаточными числами. Таким образом, вы можете легко «ползать» на парковке или динамично ездить по трассе. Подробнее на сайте сайта.
CVT анимация
Вождение автомобиля с вариатором очень похоже на вождение с автоматической коробкой передач, за исключением того, что вы не почувствуете никаких переключений передач. Вместо этого двигатель просто плавно набирает обороты вверх и вниз.Вы нажимаете педаль акселератора, и двигатель автомобиля набирает скорость до определенного значения, а затем просто остается на этой скорости, в то время как автомобиль движется все быстрее и быстрее, поскольку два шкива в коробке передач меняют размер. Привыкание к вариатору может занять некоторое время из-за несколько странного звука и принципа работы вариатора. Некоторые автопроизводители даже предлагают вариаторы с подрулевыми переключателями, имитирующими автоматическую или механическую коробку передач.
с каждым годом набирает все большую популярность, появляясь на все большем количестве новых автомобилей.Преимущество такой коробки — простота, а также высокая эффективность работы, если вы предпочитаете спокойную размеренную езду. Но если вы любите быструю езду или хотите машину с высокими характеристиками, то этот вариант, к сожалению, вам не подойдет, так как он очень быстро изнашивается.
Казалось бы, вариатор будет идеальным и светлым будущим для большинства водителей, но, тем не менее, потребовалось много времени, чтобы довести эту технологию до совершенства — особенно прочность ремня этой трансмиссии — есть большая разница между тем, какой вид на этот ремень приходится нагрузка в скутере, и который в большой легковой машине.
К тому же у вариатора на сегодняшний день есть очень большой минус, который практически сводит на нет все его достоинства — ломается … Практически у всех ломается — считается, что такая коробка проезжает в среднем около 100 тысяч километров, а потом его нужно менять, а это часто стоит треть стоимости всей машины.
Коробка передач с двойным сцеплением (DCT)
Широко известная аббревиатурой DCT (благодаря Porsche) и некоторыми другими, и используемая в довольно дорогих спортивных и гоночных автомобилях, коробка передач с двойным сцеплением, по сути, представляет собой своего рода высокотехнологичный коллаж, сделанный из автоматической, механической коробки передач и компьютера.
Как следует из названия, в системе используются две муфты переключения передач. Коробку можно использовать в полностью автоматическом режиме, используя компьютер для определения времени и условий переключения передач, или в качестве механика, с возможностью ручного переключения передач водителем с помощью тех же лепестков на рулевом колесе или кнопок переключения передач. . Кроме того, управление компьютером в момент переключения, как правило, также может быть отрегулировано водителем таким образом, чтобы переключать трансмиссию в соответствии с вашим личным стилем вождения.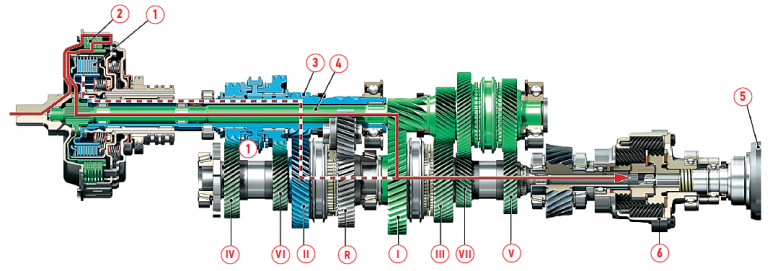
Так выглядит коробка с двойным сцеплением
Коробки передачв DCT можно переключать с молниеносной скоростью — обычно за доли секунды — и делать это очень плавно благодаря автоматическому управлению, что делает его отличным вариантом для гоночных и высокопроизводительных автомобилей. Хотя DCT обычно используется в очень дорогих спортивных автомобилях, он может быть довольно компактным — настолько, что Honda также устанавливает его в качестве опции на несколько своих мотоциклов.
Односкоростной редуктор
В отличие от своих шумных собратьев, у них немного другие требования к коробке передач, и поэтому они имеют свои собственные типы передач или используют модифицированные версии традиционных коробок передач.
Односкоростная коробка передач была установлена на заре автомобильной и мотоциклетной эпох и, по сути, представляла собой прямое или почти прямое соединение двигателя с колесами (передачи требовались только для того, чтобы скорость вращения колес была меньше, чем у скорость двигателя). Сегодня, спустя почти полтора века, односкоростная трансмиссия вернулась в автомобильную промышленность в области производства электромобилей. И дело здесь в самой природе электродвигателя — он, в отличие от бензинового и дизельного, может работать практически в любом диапазоне скоростей, в том числе, например, на одном обороте в секунду.Если у вас была возможность прокатиться на Tesla Model S, вы наверняка осознавали, что машина может молниеносно разгоняться практически на любой скорости, и ей практически не нужно больше одной передачи.
Однако ряд производителей электромобилей поставляют свои творения с коробками передач.
Полуавтоматическая коробка передач
Полуавтоматическая коробка передач — это очень продвинутая система, в которой для прямого переключения передач используется старое доброе сцепление вместо преобразователя крутящего момента в классической машине.В отличие от механической коробки передач, сцепление управляется компьютером. Это не только делает переключение передач намного быстрее, чем в механической коробке передач, но также упрощает процесс вождения и фиксирует автомобиль, предотвращая его скольжение, когда автомобиль припаркован. Как и типтроник, полуавтоматическая коробка передач может быть переключена в полностью ручной режим переключения передач по желанию водителя. Двумя типами наиболее распространенных полуавтоматических трансмиссий являются описанная выше коробка передач с двойным сцеплением и электрогидравлическая коробка передач (секвентальная коробка передач ).
Это не только делает переключение передач намного быстрее, чем в механической коробке передач, но также упрощает процесс вождения и фиксирует автомобиль, предотвращая его скольжение, когда автомобиль припаркован. Как и типтроник, полуавтоматическая коробка передач может быть переключена в полностью ручной режим переключения передач по желанию водителя. Двумя типами наиболее распространенных полуавтоматических трансмиссий являются описанная выше коробка передач с двойным сцеплением и электрогидравлическая коробка передач (секвентальная коробка передач ).
Коробка передач IVT
IVT, по сути, представляет собой конкретный тип вариатора (CVT), но отличается от последнего тем, что включает в себя не только бесконечное количество передаточных чисел, но также «бесконечно» максимальные передаточные числа. IVT относится к этому типу вариаторов, которые могут включать передаточное число с «нулевым коэффициентом», при котором входной вал может вращаться без какого-либо вращения выходного вала (когда автомобиль неподвижен и его двигатель работает), оставаясь при этом закрыт в трансмиссии. Конечно, передаточное число в этом случае не «бесконечное», а «неопределенное».
Какие бывают коробки передач и чем они отличаются? Видео
Заголовок
Сегодня на автомобильном рынке представлено огромное количество моделей, каждая из которых имеет свой неповторимый дизайн, как результат решения тех или иных технических проблем. Одним из важных критериев каждой машины является скорость и время разгона. Не последним значением в этих направлениях является коробка передач, так как именно она отвечает за передачу мощности мотора и его работу.С плохой коробкой передач вождение становится самым жутким видом. На сегодняшний день существует три основных типа редукторов:
.- Автомат
- Полуавтомат.
Наиболее популярны первые два типа. Дело в том, что они используются чаще всего, хотя в последнее время все больше машин имеют автоматическую коробку передач. Если говорить о тех или иных сторонниках и аргументах, на которые они опираются, то можно сказать следующее: у первых двух они есть, а у полуавтоматической КПП нет ярко выраженных сторонников.Какая разница? Снова в популярности. Поскольку чаще используются автомат и механика, об их устройстве, плюсах и минусах знает больше людей, тогда как принцип работы полуавтомата многим не знаком, а потому обычному человеку нет возможности выделить очевидные положительные моменты и недостатки. . Итак, как работает полуавтоматическая коробка передач?
Если говорить о тех или иных сторонниках и аргументах, на которые они опираются, то можно сказать следующее: у первых двух они есть, а у полуавтоматической КПП нет ярко выраженных сторонников.Какая разница? Снова в популярности. Поскольку чаще используются автомат и механика, об их устройстве, плюсах и минусах знает больше людей, тогда как принцип работы полуавтомата многим не знаком, а потому обычному человеку нет возможности выделить очевидные положительные моменты и недостатки. . Итак, как работает полуавтоматическая коробка передач?
Принцип действия
Стоит сразу отметить, что рассматриваемая система имеет более сложную структуру, чем вышеупомянутые типы ящиков.Так, при работе полуавтоматической коробки передач функционируют сразу два механизма переключения. Вот в этом принципиальное отличие. Суть принципа работы в том, что каждому механизму закреплен определенный набор шестерен, за переключение которых он отвечает. Например, наиболее популярна следующая система распределения: первый механизм переключает на первую, третью и пятую передачи, а второй — на вторую, четвертую и шестую. Стоит сказать, что по этому принципу используется коробка передач, имеющая шесть ступеней.Чего хотели добиться дизайнеры, создав этот механизм? Во-первых, такая конструкция обеспечивает более быстрое переключение, повышенную плавность хода процесса, а также, что немаловажно, это значительное увеличение отдачи двигателя, что позволяет даже очень маломощным двигателям достигать достаточно высоких результатов, которых раньше не было. достигнуто.
АКПП
Если продолжить тему конструктивных моментов, то очевидной особенностью станет отсутствие педали сцепления.Это стало возможным благодаря тому, что больше нет необходимости отделять двигатель напрямую от деталей трансмиссии, и, следовательно, отпадает необходимость в дополнительной педали. Таким образом, автомобиль рассматриваемого типа также имеет две педали, как и с автоматической коробкой передач.
Возникает новый вопрос: как осуществляется процесс переключения передач ?. Дело в том, что переключение происходит, прежде всего, за счет работы электронных систем, которые проводят общий анализ всех систем автомобиля и переключаются в зависимости от их состояния, но также стоит отметить, что, в отличие от автоматической коробки передач, можно использовать ручную регулировку, которая позволяет самостоятельно регулировать, на какой передаче работает ваша машина.Это может быть полезно в ряде случаев, например, для оптимального проезда любого перекрестка необходимо использовать определенную передачу и так далее.
В чем отличия полуавтомата?
Поскольку полуавтомат имеет принципиально новую конструкцию, можно говорить о его достоинствах и недостатках по сравнению с другими типами. Ниже приведены основные положительные моменты:
- Плавный разгон. Это достигается за счет плавного переключения передач, что позволяет добиться минимального времени в 8 миллисекунд;
- Только при использовании рассматриваемой коробчатой модели можно полностью использовать все возможности двигателя, начиная с самых низких оборотов и заканчивая максимальными.Это, без сомнения, положительно отражается на общей динамике автомобиля;
- Прибыльность. Благодаря более полному использованию режима работы двигателя коробка экономит топливо. Если говорить о числовом значении, то экономия достигает 10, а иногда и 20 процентов;
- Комфорт водителя. Все вышеперечисленные факторы позволяют добиться более комфортного вождения.
К сожалению, как и у любого другого типа ящиков, у полуавтомата есть свои недостатки, которые опять же связаны с особенностями конструкции.
- Сложность конструкции. Этот факт влечет за собой довольно большое количество последствий. Во-первых, сложность ремонта, возникающая из-за большого количества нюансов. Во-вторых, дороговизна;
- Отсутствие способности быстро реагировать. Благодаря конструктивным особенностям, разработанным инженерами, эта коробчатая модель очень плохо реагирует на резко меняющиеся условия. Таким образом, когда возникает необходимость в каком-либо резком маневре, он может не сработать, что приведет к плохим последствиям.Пожалуй, это самый серьезный недостаток этого механизма.
Заключение
Несмотря на наличие недостатков, некоторые из которых особенно серьезные, этот бокс продолжает производиться и имеет свою специфическую площадь автомобилей, на которых он устанавливается. Сегодня у многих автомобилей уже есть бесступенчатые варианты, и коробка с полуавтоматом способна им составить конкуренцию, а это лучший показатель ее функциональности. Его рыночная доля не самая большая, по оценкам различных экспертов, сегодня он составляет около четверти всего автомобильного рынка.Возможен небольшой рост в будущем.
Наконец-то сбылась моя мечта! Я купил машину. Если честно, сначала очень сомневался. Он даже ругал себя за то, что поддался на уговоры менеджера автосалона. Дело в том, что в моей новой машине установлена роботизированная коробка передач. Раньше я о ней почти ничего не слышал.
Синхронизирует рабочий процесс элементов коробки передач. В свою очередь, электронная система может распознавать, предсказывать стиль и действия водителя.Зачем тебе такая коробка? Насколько мне известно, его разработали ведущие европейские автомобильные компании. Цель — улучшение динамических и ходовых характеристик машин, а также их управляемости.
Это подтверждают многочисленные видеоролики о роботизированной коробке передач, которые я смог найти в Интернете. Я разместил их равномерно на протяжении всего обзора этой коробки. Со своей стороны могу только добавить, что удобство, комфорт, легкость управления и динамичность моей машины действительно отличаются в лучшую сторону.И, поверьте, было с чем сравнивать.
На мой взгляд, я был не один. Преодолевшие сомнения в правильности моего решения о покупке именно этой машины развеялись, как только я прочитал отзывы о роботизированной коробке передач.
Преодолевшие сомнения в правильности моего решения о покупке именно этой машины развеялись, как только я прочитал отзывы о роботизированной коробке передач.
Что думают об этой КПП водители
Большинство водителей сходятся во мнении, что эта трансмиссия отлично помогает. В сложных городских условиях, с загруженным движением на дорогах, с постоянными пробками, пробками, роботизированная коробка передач помогает машине работать безупречно.Очень вероятно, что при создании робота разработчики ориентировались на такие условия движения.
Остановки, торможение и трогание на светофоре проявляются в перерасходе топлива, что не способствует его экономии. Однако с роботизированной трансмиссией все иначе. Отличная экономия топлива, отличная динамика и отличные ходовые качества — вот небольшой перечень достоинств коробки передач.
Хвалил, конечно, я систему сильно.Естественно, у нее есть свои недостатки. Я постараюсь их перечислить.
- Все запрограммировано так, что изменить динамику хода не получается. Мы попадаем во власть предсказуемости.
- Периодически робот тормозит при переключении передач. Иногда нужно резко переключиться. Это можно сделать на механике, но не получится.Все это затраты на робота.
- На роботе будет сложно подняться в гору. Рискуйте перегреть сцепление. В этой ситуации рекомендую перейти в ручной режим.
- City mode grip fire, если не крути. Плюс ощущаются рывки при переключении передач.
Конечно, если вы компьютерный гений, то можете попробовать взломать систему, хотя сложности явно возникнут.
Вот такой вот небольшой список. Я описал это на основе личного опыта, и делаю это уже 6 месяцев. Возможно, позже появятся еще какие-то минусы, о которых я обязательно сообщу.
Строительное устройство
Устройство роботизированной коробки передач не так сложно, как может показаться. Основа его конструкции — механическая трансмиссия.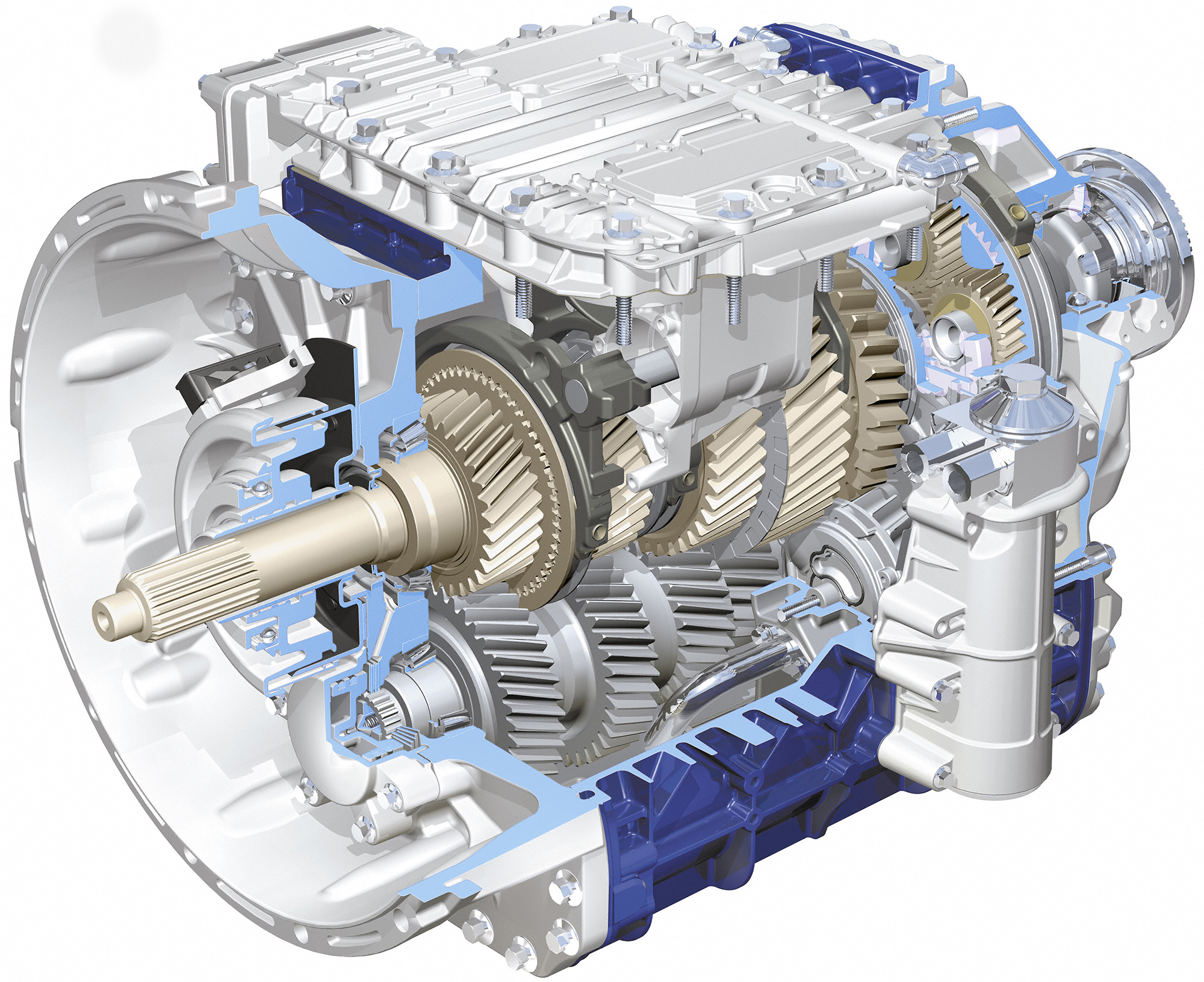 Может иметь гидравлический или электрический привод сцепления. Гидравлическое сцепление происходит с помощью гидроцилиндров. Они управляются соленоидными клапанами. Электрическое сцепление обеспечивается сервомеханизмами и имеет малую скорость. Для переключения передач требуется примерно 0,3–0,5 с.
Может иметь гидравлический или электрический привод сцепления. Гидравлическое сцепление происходит с помощью гидроцилиндров. Они управляются соленоидными клапанами. Электрическое сцепление обеспечивается сервомеханизмами и имеет малую скорость. Для переключения передач требуется примерно 0,3–0,5 с.
Гидравлический привод демонстрирует четкую и быструю работу.Он использует гидроцилиндры. Они управляются соленоидными клапанами. Теперь посмотрим, как работает роботизированная коробка передач. Может работать в двух режимах:
- автомат;
- полуавтомат.
Автоматический режим предполагает переключение передач с помощью коробки передач, использующей информацию от датчиков. Полуавтоматический режим предполагает ручное переключение передач. При переключении рычага переключения передач и нажатии на педаль газа с датчиков на блок обработки передается информация о текущей скорости и новом скоростном режиме.
Блок синхронизирует всю информацию, определяет оптимальную скорость, время переключения скоростей. Также он обеспечивает бесперебойную работу механизмов коробки передач. Хочу отметить, что в нем учтено:
- скорость вращения двигателя;
- работа кондиционера;
- индикаторов приборной панели.
Гидромеханический блок, отвечающий за замыкание и размыкание сцепления, управляет центральным процессором. Все действия выполняются одновременно с переключением передач водителем.Сам гидромеханический агрегат состоит из севромотора, связанного с линейной батареей. Гидравлический цилиндр запускается с помощью тормозной жидкости. Обеспечивает время автономной работы.
Такая система имеет большое и, на мой взгляд, главное преимущество. Электроника реагирует намного быстрее и точнее людей. В результате тяга может выполняться без вашего прямого участия. Такой вариант идеально подойдет девушкам, решившим купить машину. У самки часто возникают проблемы с переключением передач на механике.