Рекуперативное торможение ад: Рекуперативное торможение асинхронного электродвигателя
Рекуперативное торможение асинхронного электродвигателя
Асинхронная машина, в принципе, как и все электрические машины, является обратимой. Это значит, что она может работать как в режиме двигателя, выполняя какую-то полезную работу, так и в режиме генератора – вырабатывая электрическую энергию.
Если к валу асинхронного электродвигателя приложить момент нагрузки, то преодолевая этот момент, машина будет потреблять энергию из сети. При работе на холостом ходу будет потребляться только энергия, необходимая для покрытия механических потерь в самой машине. Если к валу асинхронной машины подсоединить еще один электродвигатель и с его помощью вращать асинхронную машину, то потери в роторе будут компенсированы за счет приводного двигателя, а в случае, если скорость вращения вала асинхронной машины превысить синхронную частоту вращения (скорость вращения магнитного поля статора), то начнется рекуперация энергии в сеть. Давайте более подробно рассмотрим процесс рекуперации энергии в сеть.
При работе машины в двигательном режиме вращающееся магнитное поле пересекает проводники роторной и статорной обмотки в одинаковом направлении, следствием чего становится совпадение ЭДС статора Е1 и ротора Е2 по фазе. При переходе асинхронника в режим рекуперативного торможения магнитное поле пересекает проводники статора в прежнем направлении, а вот роторные проводники при n>n0 – в противоположном. При этом ЭДС ротора изменит свой знак на обратный и будет равна:
Соответственно ток ротора:
Отсюда следует, что при переходе в режим рекуперации направление изменит только активная составляющая роторного тока, реактивная не поменяет свое направление. Активный ток поменяет направление из-за изменения направления момента асинхронной машины, по сравнению с двигательным режимом.
Векторная диаграмма асинхронного электродвигателя в генераторном режиме:
Векторная диаграмма показывает, что между U и I1 угол сдвига фазы φ1>(π/2), что будет соответствовать режиму, в котором первопричиной появления тока I1 будет не напряжение питающей сети, а ЭДС Е1. Таким образом, статорная обмотка работает в режиме генератора, отдавая энергию в сеть.
Таким образом, статорная обмотка работает в режиме генератора, отдавая энергию в сеть.
Такие же выражения возможно получить и с помощью эквивалентной схемы. Активная составляющая роторного тока будет равна:
Это значит, что при ω>ω0, скольжение s изменит знак, соответственно поменяет знак I2a/, что значит переход машины в режим рекуперативного торможения. Это подтверждает и выражение электромагнитной мощности:
Данное выражение показывает, что при переходе в режим рекуперативного торможения мощность электромагнитная изменяет свой знак, что означает отдачу мощности вторичным контуром.
Обратившись к выражению мощности вторичного контура:
Из этого выражения мы можем увидеть, что знак реактивной мощности будет сохранятся независимо от режима работы.
Это значит что – асинхронный электродвигатель в рекуперативном режиме тоже потребляет реактивную мощность. И чтоб осуществить рекуперацию, необходим источник реактивной мощности, который необходим для создания вращающегося магнитного поля.
Рекуперативное торможение часто используют в подъемно-транспортных механизмах, при спуске тяжелых грузов. Груз, который опускается, развивает на валу машины отрицательный момент и скорость становится n>n0. Таким образом, машина переходит в режим рекуперативного торможения и тем самым создает тормозной момент на валу. В точке пересечения характеристики со значением статического момента скорость двигателя устанавливается, и груз опускается с постоянной скоростью, как это показано ниже:
тормозной момент будет отсутствовать в том случае, если момент на валу машины будет больше, чем критический момент этой же машины.
Рекуперативное торможения при наличии на валу асинхронной машины реактивного статического момента возможно только при наличии преобразователя частоты или двигателя, с переключающимся числом пар полюсов. Рассмотрим для двигателя с переключающимся числом пар полюсов.
Если обмотки статорные двигателя, работающего на высокой скорости
То есть число пар полюсов меньше, переключить на большее число пар полюсов р1, то в таком случае скорость вращения вала асинхронной машины станет больше, чем синхронная скорость, соответствующая новому числу полюсов
Машина перейдет в режим генератора:
На рисунке, область рекуперативного торможения соответствует участку BCD на механической характеристике.
Довольно часто такой способ применяют в металлорежущих станках, в которых применяю асинхронные машины с переключающимся количеством пар полюсов.
Тормозные режимы синхронных машин
Как и в обычных электродвигателях в синхронных машинах помимо пусковых характеристик существуют и тормозные характеристики. Для осуществления нормального тормозного режима синхронного электропривода необходимо выбрать нужный режим электрического торможения машины.
Итак, торможение синхронного электродвигателя может быть осуществлено несколькими способами:
- Противовключением – реализуется как и режим противовключения асинхронной машины;
- Динамическое торможение;
- Рекуперативное торможение (с отдачей энергии в сеть) – такой вид торможения может быть реализован при наличии преобразователя частоты, позволяющего осуществить рекуперацию энергии в сеть;
Торможение противовключением
Торможение противовключением применяется довольно редко, так как оно может вызывать значительные толчки тока в сеть, иногда превышающие значение тока при пуске, довольно сильный нагрев пусковой обмотки, следствием чего является довольно низкий cosφ и сравнительно малый тормозной момент. На рисунке ниже показаны схемы:
На рисунке ниже показаны схемы:
На рисунке а) показан двигательный режим, на рисунке б) показан режим торможения синхронной машины противовключением.
Режим динамического торможения
Режим динамического торможения синхронного электродвигателя от асинхронного отличается тем, что в синхронном электродвигателе статорная обмотка отключается от сети и подключается к тормозным резисторам, на которых гасится энергия, вырабатываемая электрической машиной при торможении. Схема приведена ниже:
При работе в двигательном режиме выключатель QF замкнут. При переходе электродвигателя в режим динамического торможения выключатель QF размыкается, а QF1 замыкается, при этом напряжение с обмотки возбуждения не снимается. В итоге машина переходит в генераторный режим, а энергия, которая вырабатывается при этом, гасится на резисторах R1, R2, R3, создавая тем самым тормозной момент. При таком режиме работы расход электроэнергии значительно ниже, чем при противовключении. Интенсивность замедления зависит от величины сопротивлений R1, R2, R3. Также на интенсивность влияет и параметры источника постоянного тока возбуждения. Если возбудитель находится на валу машины (собственный возбудитель), то время замедления значительно возрастет, так при уменьшения скорости вращения синхронного электродвигателя будет падать ток возбуждения. Если возбудитель питается от другого источника тока, то момент торможения поддерживается постоянным.
Интенсивность замедления зависит от величины сопротивлений R1, R2, R3. Также на интенсивность влияет и параметры источника постоянного тока возбуждения. Если возбудитель находится на валу машины (собственный возбудитель), то время замедления значительно возрастет, так при уменьшения скорости вращения синхронного электродвигателя будет падать ток возбуждения. Если возбудитель питается от другого источника тока, то момент торможения поддерживается постоянным.
Рекуперативное торможение
Схема показана ниже:
Приведенная схема может реализовывать две схемы торможения – рекуперативное или динамическое. При использовании схемы инвертора позволяющего проводить рекуперацию энергии, оно будет произведено, но такая схема будет немного дороже чем схема с динамическим замедлением (показана пунктиром). Если электропривод имеет частые пуски и остановы, то применять схему с рекуперативным торможением более целесообразно, чем при длительных или кратковременных режимах работы. При выборе схемы питания необходимо произвести технико – экономические расчеты целесообразности применения какой – то из схем.
При выборе схемы питания необходимо произвести технико – экономические расчеты целесообразности применения какой – то из схем.
Динамическое торможение асинхронной машины
Еще одним видом торможения асинхронного электродвигателя, применимого как для машин с короткозамкнутым ротором, так и с фазным, является динамическое торможение. Динамическое торможение довольно распространено в системах электроприводов, так как не требует большой сложности схемы, имеет устойчивые характеристики в отличии от конденсаторного торможения и торможения противовключением.
Одна из возможных схем включения ниже:
Принцип работы динамического торможения довольно прост – двигатель отключается от сети с помощью контактора КМ1 и с помощью контактора КМ2 подключают к двум фазам электродвигателя постоянный ток, в нашем случае полученный с выпрямителя. Постоянный ток, который начнет протекать по двум обмоткам статора, создаст постоянное магнитное поле. При вращении ротора асинхронной машины в этом постоянном магнитном поле в обмотках роторных индуктируется ЭДС, которая в свою очередь приведет к появлении в роторе тока. При взаимодействии тока ротора с магнитным полем статора возникает тормозной момент.
При взаимодействии тока ротора с магнитным полем статора возникает тормозной момент.
В таком режиме работы асинхронный электродвигатель будет представлять собой обычный синхронный генератор с неявно выраженными полюсами и работающим с переменной частотой. Нагрузкой этого генератора будет сопротивление включенное в роторную цепь, или же при использовании асинхронной машины с короткозамкнутым ротором – его обмотка. При торможении будет снижаться скорость асинхронного электродвигателя, и соответственно начнет снижаться ЭДС ротора, его ток и тормозной момент.
Симметричное подключение всех трех обмоток при динамическом торможении невозможно без специальной коммутирующей аппаратуры. Поскольку подключение всех трех фаз к цепи постоянного тока не окажет существенное влияние на характеристику и существенно усложнит схему, используют подключение двух фаз к цепям постоянного тока как показано ниже для соединения звезда:
И для соединения в треугольник:
Также при выборе источника постоянного напряжения для выполнения динамического замедления асинхронной машины необходимо учитывать то, что при подаче на статорные обмотки постоянного напряжения изменится сопротивления обмоток, а именно, исчезнет индуктивное сопротивление.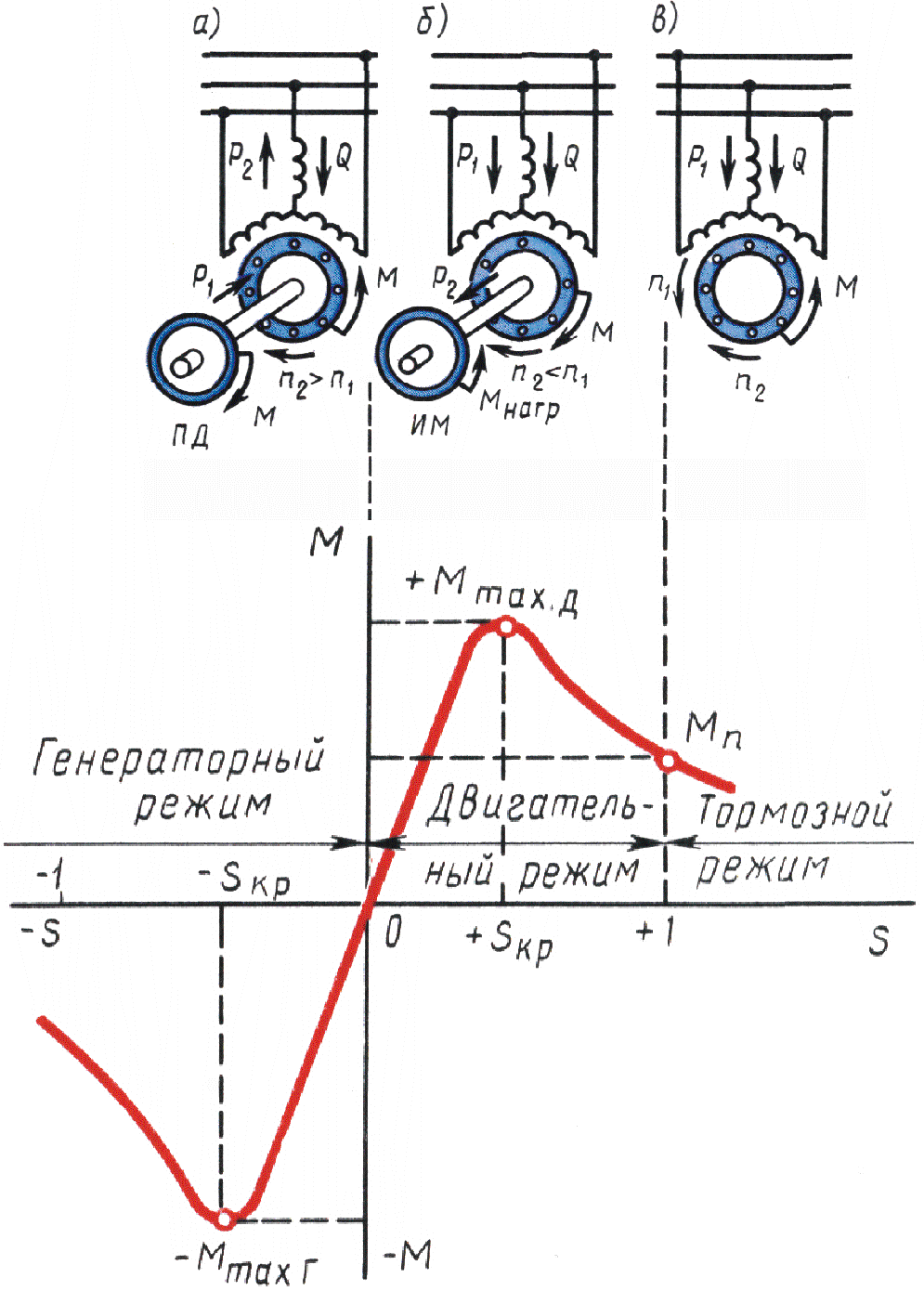
В качестве такого источника могут использовать обычные диодные выпрямители неуправляемые подключенные через трансформатор, тиристорные преобразователи или же для машин больших мощностей специальные генераторы постоянного тока с пониженным выходным напряжением.
Для анализа явлений, происходящих в асинхронном электродвигателе при динамическом торможении, более целесообразно заменить режим работы синхронного генератора переменной частоты (в этом режиме работает асинхронный двигатель при динамическом замедлении) заменить эквивалентным ему режимом, когда статор вместо постоянного тока питается переменным. В этом случае совместно обмотками ротора и статора будет создаваться результирующая магнитодвижущая сила МДС. При замене эквивалентной режима работы необходимо, что бы выполнялось равенство магнитодвижущих сил, то есть Fn=Fϟ.
Где: а) подключение обмотки статора к источнику постоянного напряжения;
б) создание обмотками статора пространственно смещенных друг относительно друга магнитодвижущих сил;
в) результирующая МДС. Векторная диаграмма.
Из рисунка в) можем определить:
Амплитуда данной МДС, создаваемая переменным I1 статорной обмотки:
Из равенства Fn=Fϟ можно вычислить эквивалентное значение переменного тока постоянному:
Из этого выражения следует то, что для создания номинального магнитного потока постоянный ток должен быть больше, чем переменный.
Где: In – постоянный, а I1 – действующий токи статора.
W1 – количество витков в одной фазе статорной обмотки.
Характерные величины для питания других схем постоянным током показаны в таблице ниже:
После определения I1, который эквивалентен постоянному, можно асинхронную машину в режиме динамического торможения представить как нормальный асинхронный электродвигатель.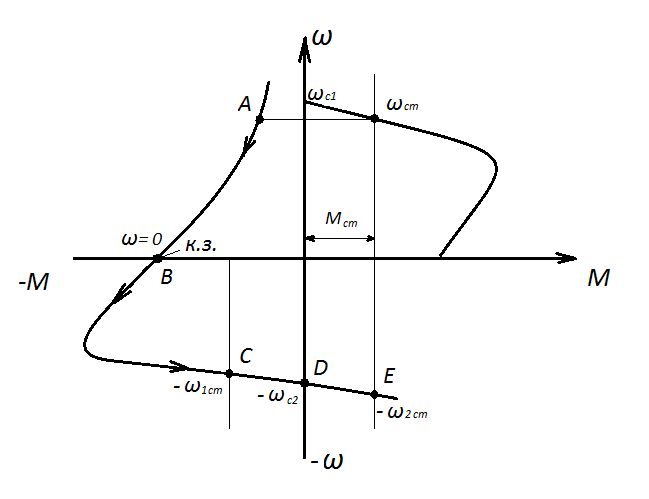 Ниже показана векторная диаграмма для токов асинхронной машины в предположении того, что к частоте сети и числу витков статора приведена обмотка ротора.
Ниже показана векторная диаграмма для токов асинхронной машины в предположении того, что к частоте сети и числу витков статора приведена обмотка ротора.
Но, работа асинхронного электродвигателя в режиме динамического торможения существенно отличается от его работы в нормальном режиме. При работе в нормальном (двигательном) режиме магнитный поток машины остается практически неизменным. А при динамическом торможении с изменением скорости вращения вала электродвигателя будет меняться и магнитный поток. Это вызвано изменением результирующей МДC, которая складывается с МДС статора (постоянный I) и изменяющейся МДС ротора (переменный I переменной частоты).
Приведенный к числу витков статора намагничивающий ток:
Из векторной диаграммы:
Возведя в квадрат получим:
При фиксированном значении частоты сети, синхронной скорости ω0, магнитном потоке в роторе машины будет индуцироваться ЭДС Е2. Если скорость изменится, то ЭДС будет равна Е2(ω/ω0).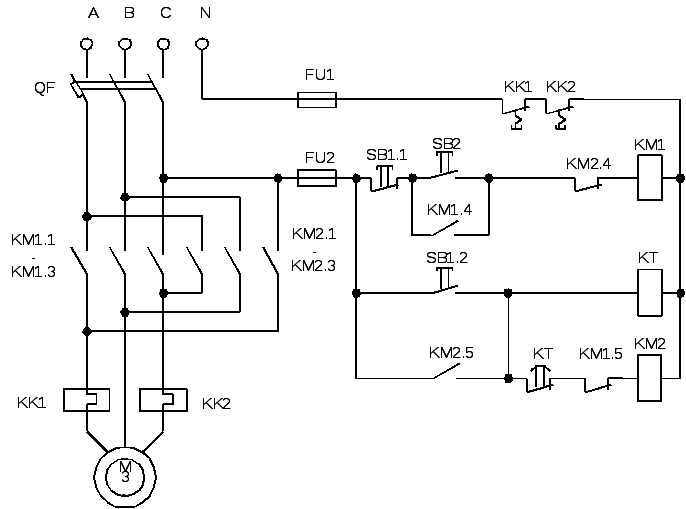 Соответственно индуктивное и активное сопротивление роторной цепи будет r2 и Х2(ω/ω0), где Х2 – сопротивление индуктивное при определенной частоте сети. Для упрощения расчетов введем коэффициент ν, равный ν=(ω/ω0). Для вторичного контура будет справедливо следующее соотношение: Е2/ν = I2/z2/. После выполнения приведения параметров вторичного контура к количеству витков первичного получим Е1 = Е2/. Намагничивающий ток:
Соответственно индуктивное и активное сопротивление роторной цепи будет r2 и Х2(ω/ω0), где Х2 – сопротивление индуктивное при определенной частоте сети. Для упрощения расчетов введем коэффициент ν, равный ν=(ω/ω0). Для вторичного контура будет справедливо следующее соотношение: Е2/ν = I2/z2/. После выполнения приведения параметров вторичного контура к количеству витков первичного получим Е1 = Е2/. Намагничивающий ток:
Очевидно:
Преобразовав предыдущие выражения:
Или:
Подставив значение в предыдущее уравнение:
Получим:
Развиваемый двигателем момент электромагнитный будет определятся потерями во вторичном контуре:
Из полученного выражения можно определить, что возникающий момент при динамическом торможении будет определятся током I1 и есть функцией скорости вращения вала электродвигателя ν.
Исследовав выражения на максимум и минимум, найдем критический момент при относительной скорости:
А критический момент:
Ниже показана характеристика динамического торможения при различных роторных сопротивлениях и разных значениях статорных токов:
На графике кривые 1 и 3 снятые при постоянном сопротивлении роторной цепи и изменении постоянного напряжения статора, а 2 и 4 – при неизменном напряжении статора и меняющемся сопротивлении ротора.
Выражения момента может принять вид:
При динамическом торможении асинхронного двигателя его можно рассматривать как генератор синхронный в режиме короткого замыкания и при переменной скорости вращения. Соответственно Iкз:
Роторное сопротивление функции скорости Е = сω, и Хd = 2πfLd = kω.
Поэтому, ток короткого замыкания Ik практически не зависит от скорости при больших скоростях вращения вала машины:
Однако при сильном снижении скорости индуктивное сопротивление тоже снижается, и оно становится соизмеримым с активным. Активное сопротивление, в свою очередь, начинает существенно влиять на Ik в сторону его уменьшения. Данная зависимость приведена ниже:
Активное сопротивление, в свою очередь, начинает существенно влиять на Ik в сторону его уменьшения. Данная зависимость приведена ниже:
Вид данной механической характеристики будет определять зависимость активной составляющей Ik от скорости вращения:
Механические характеристики асинхронного электродвигателя в режиме динамического торможения по форме практически ничем не отличаются от механических характеристик в двигательном режиме. Однако в режиме динамического торможения характеризующие его кривые имеют сильные отличия от двигательного режима:
- При динамическом торможении результирующий магнитный поток неподвижен, в отличии от двигательного режиме, где он вращается с синхронной скоростью;
- В двигательном режиме статорный ток меняется в зависимости от скольжения, при динамическом замедлении он неизменен;
- Магнитный результирующий поток в двигательном режиме постоянен, при динамическом же торможении, особенно при малых скоростях, он увеличивается.
 Это вызвано малым размагничивающим действием ротора;
Это вызвано малым размагничивающим действием ротора; - Для двигательного режима все характеристики берут начало в точке синхронной скорости (n0 или ω0), а при динамическом торможении начало находится в точке, которая соответствует неподвижному ротору.
 Это вызвано малым размагничивающим действием ротора;
Это вызвано малым размагничивающим действием ротора;Расчет механической характеристики асинхронного электродвигателя в режиме динамического торможения заключается в необходимости определить основные параметры схемы, которые обеспечат получение характеристики нужного вида. Для данного случая характеристики определяют значения момента критического Мк и критической скорости νк.
По универсальной или же экспериментально снятой характеристике холостого хода определяют реактивное сопротивления контура намагничивания:
Где Uф.хх – фазное напряжение холостого хода; I0 – ток холостого хода соответственно. В случае если νк приближается к единице, то Хμ рекомендуется определять по начальной линейной части характеристики холостого хода (ХХ).
Для известных Хμ, νк и Х2/ приведенное активное сопротивление ротора будет равно:
Последнее необходимо для того, что бы определить добавочное сопротивление ротора, которое подключается, конечно же, только для асинхронных электродвигателей с фазным ротором. Зная Мк и Хμ:
После этого для выбранной схемы подключения устройства динамического торможения с помощью таблицы указанной выше или же с помощью расчетов находят необходимое значение постоянного Iн. после чего переходят к построению характеристики механической без учета насыщения.
Насыщение оказывает влияние на динамическое торможение асинхронным электродвигателем тем, что при изменении тока намагничивания индуктивное сопротивление намагничивания Хμ будет величиной переменной, что соответственно скажется на тормозном моменте (он тоже будет переменен).
Зависимость Хμ = f(Iμ) может определятся по кривой намагничивания Е1 = f(Iμ). Для этого могут использовать либо экспериментально снятую кривую, либо универсальную для данного типа асинхронного двигателя. Что бы получить характеристику Е1 = f(Iμ) к зажимам статора асинхронной машины, приводимой в движение другой машиной с синхронной скоростью, подключают изменяющееся по величине напряжение. Потребляемый из сети ток, при таких условиях, и будет Iμ, соответствующий приложенному напряжению.
Для этого могут использовать либо экспериментально снятую кривую, либо универсальную для данного типа асинхронного двигателя. Что бы получить характеристику Е1 = f(Iμ) к зажимам статора асинхронной машины, приводимой в движение другой машиной с синхронной скоростью, подключают изменяющееся по величине напряжение. Потребляемый из сети ток, при таких условиях, и будет Iμ, соответствующий приложенному напряжению.
С учетом насыщения механическая характеристика строится по точкам. Для этого задаются рядом значений Iμ в пределах от I1 до 0 и с помощью кривой намагничивания определяют соответствующие значения индуктивности намагничивания:
Если значения I1, Iμ, а также Хμ и выполнив соответствующие преобразования в уравнениях, получим две неизвестные: I2/ и ν. Исключив I2/:
Откуда:
Интересующее нас выражение примет вид:
После чего, располагая знаниями I1, Хμ, ν находят значение момента по формуле приведенной ранее, которое соответствует ν с учетом насыщения. Таким образом, находят точки механической характеристики для значений Iμ от максимального значения до нуля.
Таким образом, находят точки механической характеристики для значений Iμ от максимального значения до нуля.
Наиболее широко динамическое торможение распространено в электроприводах шахтных подъемных машин, но оно не менее активно применяется и в других отраслях промышленности.
Торможение асинхронного двигателя
При использовании асинхронного двигателя, в качестве составной части какого-либо электропривода, часто возникает потребность в искусственной остановке двигателя. В настоящее время существует множество различных способов торможения асинхронного двигателя, вот некоторые из них.
Динамическое (электродинамическое) торможение
Если отключить двигатель от сети переменного тока и подключить его к источнику постоянного тока, то произойдет динамическое торможение. Обмотка статора, при протекании постоянного тока, создаст неподвижное магнитное поле. При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
При вращении в таком поле, в роторе будет наводиться ЭДС, под действием которой будет протекать ток. Этот ток будет взаимодействовать с неподвижным полем статора и создавать тормозной момент, который будет направлен против направления вращения ротора. В итоге двигатель будет постепенно останавливаться, причем скорость его остановки будет зависеть от силы постоянного тока, протекающего по статору, ну и конечно же от запасенной кинетической энергии электропривода. Эта энергия, преобразовываясь в электрическую, рассеивается в виде тепла на роторе.
В двигателе с фазным ротором, величину тормозного момента, а следовательно, скорость торможения, можно изменять, изменяя величину добавочных сопротивлений в цепи ротора.
Рекуперативное (генераторное) торможение
Рекуперативное торможение применяется в основном в качестве подтормаживания перед основным торможением, либо при спуске груза, например в лифтах.
Чтобы наступило рекуперативное торможение, нужно чтобы частота вращения ротора превысила синхронную частоту вращения. В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
В таком случае двигатель начнет отдавать энергию в сеть, то есть станет асинхронным генератором. При этом электромагнитный момент двигателя становится отрицательным, и оказывает тормозной эффект.
Добиться генераторного торможения можно несколькими способами. Например, в двухскоростных двигателях, при переключении с большей скорости на меньшую. При этом ротор вращается по инерции с частотой, выше, чем новая синхронная частота. Возникнет тормозной момент, который уменьшит скорость до новой номинальной.
Допустим, что в начальный момент времени наш двигатель работал на характеристике 1 в точке A, после переключения скорости на более низкую, он перешел на характеристику 2 в точку B, а затем под действием тормозного момента достиг точки С, с меньшей частотой оборотов.
Генераторное торможение можно осуществить, если уменьшать частоту питания двигателя. Это возможно, если двигатель питается от тиристорного преобразователя частоты. При уменьшении частоты напряжения, уменьшается синхронная частота вращения.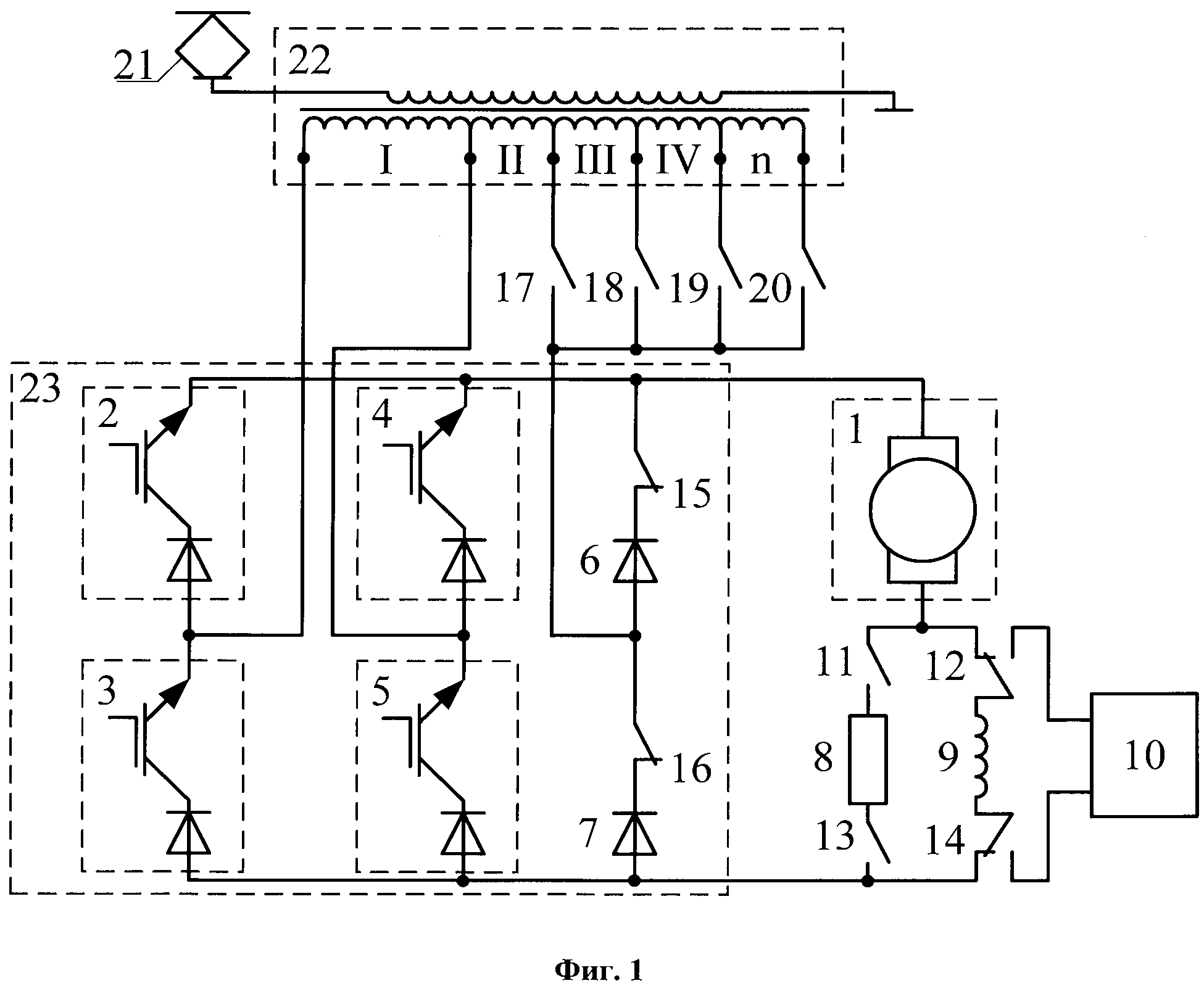 Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Частота вращения ротора, который вращается по инерции, снова окажется выше, возникнет тормозной момент, который будет снижать частоту вращения ротора. Таким образом, двигатель можно довести до полной остановки.
Торможение противовключением
Торможение противовключением применяется для быстрой остановки двигателя. Оно может быть осуществлено несколькими способами. В первом способе, в работающем двигателе, меняют две фазы местами, с помощью выключения контактора K1 и включения K2. При этом направление вращения магнитного поля статора меняется на противоположное. Возникает большой тормозной момент, и двигатель быстро останавливается. Но для того чтобы ограничить большие токи в момент увеличения тормозного момента, необходимо вводить в обмотку статора или ротора дополнительное сопротивление.
Во втором способе двигатель используют как тормоз для груза. То есть, если груз спускается вниз, то двигатель должен работать, наоборот, на подъем.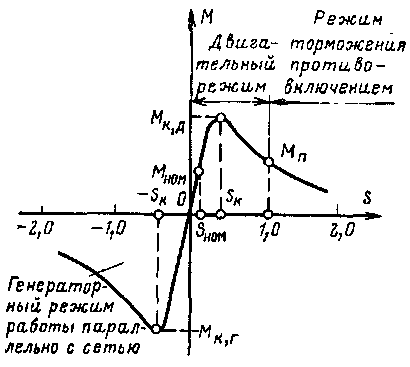 Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
Для этого в цепь ротора двигателя вводится большое добавочное сопротивление. Но его пусковой момент оказывается меньше чем момент нагрузки, и двигатель работает при некоторой небольшой скорости, тем самым обеспечивая плавный спуск.
По сути, торможение противовключением осуществляется по схеме реверса двигателя.
Торможение при самовозбуждении
Если питание двигателя отключить, то его магнитное поле затухнет только через небольшой промежуток времени. Если в этот момент подключить к статорной обмотке двигателя батарею конденсаторов, то энергия магнитного поля будет переходит сначала в заряд конденсаторов, а затем снова возвращаться в обмотку статора. При этом возникнет тормозной момент, который остановит двигатель. Такое торможение часто называют конденсаторным.
Величина тормозного момента будет зависеть от емкости конденсаторов, чем больше емкость, тем больше момент
Конденсаторы могут быть включены постоянно, а могут отключаться во время работы двигателя с помощью контактора.
Можно обойтись и без конденсаторов, просто замкнув с помощью ключей SA, обмотку статора по схеме “звезда”, предварительно отключив ее от сети с помощью контактора K. Тогда торможение произойдет значительно быстрее, за счет остаточного магнетизма двигателя. Такое торможение еще называется магнитным торможением.
Рекомендуем к прочтению — регулирование скорости асинхронного двигателя
Рекуперативное торможение. Тормозные режимы АД. Механические характеристики АД в тормозных режимах
Тормозные режимы АД. Механические характеристики АД в тормозных режимах
Лекция 14
Тормозным называется процесс изменения угловой скорости вращения электродвигателя от номинального значения до нулевого.
Различают механические способы торможения под действием фрикционных сил, приложенных к валу двигателя, а также электрические, основанные на том, что электромагнитный момент двигателя направляют противоположно скорости вращения и называют тормозным моментом.
Кроме того, существует самоторможение, при котором двигатель останавливается после выключения сети под действием статического момента сопротивления.
Электрические способы торможения подразделяют:
Рекуперативное торможение;
Торможение противовключением;
Динамическое торможение.
При рассмотрении физических процессов, характеризующих любой способ торможения, будем рассматривать простейшую модель АД, на которой его механические параметры (момент, угловая скорость вращения и синхронная скорость вращения) будут представлены в виде дугообразных стрелок. Причем направление стрелки будет соответствовать направлению того или иного параметра, а о соотношении этих величин будем судить по длине дугообразной стрелки.
В рекуперативном режиме угловая скорость вращения ротора ω по направлению совпадает с электромагнитным моментом М и угловой скоростью вращения ВМП ω0. Но при этом под действием, например, какого-либо активного источника механической энергии, ротор разгоняется на столько, что его скорость становится больше скорости вращения ВМП. При этом скольжение становиться отрицательным, т. е.
И как следствие изменяется направление пересечения обмоток ротора с силовыми линиями магнитного поля, что приводит к отрицательному моменту в соответствии с правилом левой руки и при этом по отношению к направлению вращения, момент становится тормозным (рис. 3.16).
М
ω
ω0
Рисунок 3.16 – Направление механических параметров при рекуперативном торможении
При этом механическая характеристика ω=f(M) будет являться продолжением механической характеристики в двигательном режиме, и находиться во втором квадранте (рис. 3.17).
ω рад/с
ω0 Двигательный режим
Рекуперативный режим
М, Н·м
Рисунок 3.17 – Механическая характеристика при рекуперативном торможении
При этом направление потоков энергии в электроприводе будет следующее: кинетическая энергия вращения будет направлена от механизма к двигателю, которая преобразуется в электрическую и в свою очередь будет направлена от двигателя к питающей сети. Это обеспечивает высокую экономичность процессу рекуперативного торможения. Однако в рассмотренном варианте рекуперативный режим не обеспечивает снижение скорости двигателя и тем более его остановки и может быть использован только в грузоподъемных устройствах для обеспечения плавности процесса подъема и спуска груза.
Реализация рекуперативного режима для снижения скорости вращения возможна в следующих случаях:
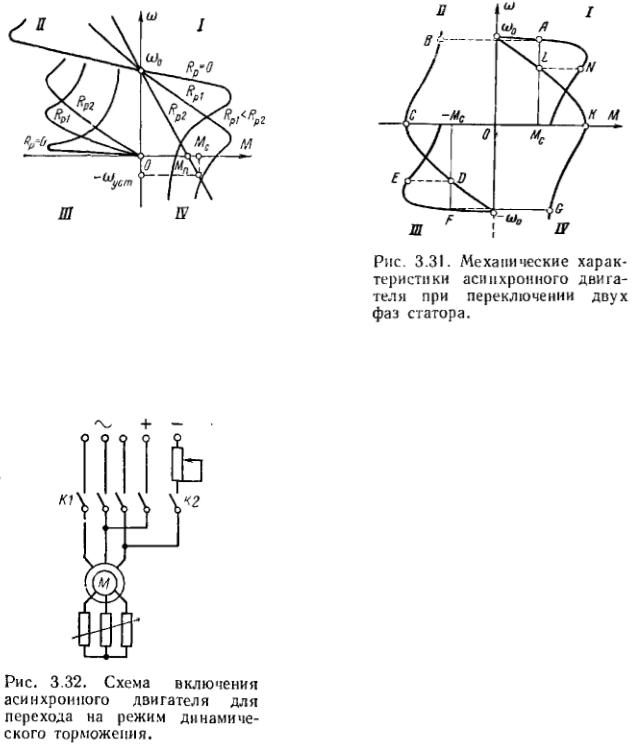
1) Переключение фаз статорной обмотки с целью увеличения числа пар полюсов двигателя (рис. 3.18). После увеличения числа пар полюсов двигателя, рабочая т. а переходит в т. b, далее скорость снижается до т. с.
p
ω рад/с
2p
ω0
-М=МТ МНОМ. М, Н·м
Рисунок 3.18 – Механические характеристики АД при снижении скорости вращения путем переключения фаз статорной обмотки
2) Уменьшение частоты питающей сети (рис. 3.19). Первый скачок частоты должен быть таким, чтобы рабочая т. а перешла во второй квадрант в т. b. После чего скорость двигателя снижается до т. с. Далее нужно снова снизить частоту и т.
ω рад/с
ω0 а f=fHOM. f ‘HOM.f »< f ‘
-М=МТ МНОМ. М, Н·м
Рисунок 3.19 — Механические характеристики АД при снижении скорости вращения путем уменьшения частоты питающей сети
Главным преимуществом рекуперативного торможения является высокая энергетическая эффективность. Недостаток – сложность реализации и как следствие ограниченная область применения.
Тормозные режимы асинхронного двигателя — Студопедия
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т.е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).
Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0 Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
Где Е20 — номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного , будет незначительным (см. рис. отрезок ).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Для вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е. FПОСТ=FПЕР. Определение МДС, создаваемой постоянным током IПОСТ для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора: . Исходя из условия . Отсюда значение переменного тока, эквивалентного постоянному: , а . Необходимые напряжения и мощность постоянного тока : .
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора . Из векторной диаграммы токов следует:
Возведя в квадрат Эти выражения и почленно складывая, получим: .Намагничивающий ток равен .
В приведенной машине , где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна: , где n — относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид: , а намагничивающий ток, выраженный через E2’: .
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора: .
Учитывая, что и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен: .
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность: , где m1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости: , а значение этого момента, также называемого критическим, равно: .
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид: .
Рекуперативное торможение: как оно работает и стоит ли оно того в небольших электромобилях?
С тех пор, как более 20 лет назад с конвейера сошла первая Toyota Prius, концепция рекуперативного торможения стала довольно известной как метод увеличения запаса хода в гибридных и электрических транспортных средствах. Но знаете ли вы, что рекуперативное торможение применяется не только к электромобилям? В наши дни вы можете найти его во всем, от электрических велосипедов и скейтбордов до электросамокатов.
Присоединяйтесь к нам, и мы глубоко погрузимся в рекуперативное торможение и его эффективность в различных электромобилях.
Что такое рекуперативное торможение?
Движущиеся транспортные средства обладают большой кинетической энергией, и когда для замедления транспортного средства применяются тормоза, вся эта кинетическая энергия должна куда-то уходить. Еще во времена неандертальцев, когда автомобили с двигателем внутреннего сгорания основывались исключительно на трении, тормоза преобразовывали кинетическую энергию транспортного средства в потраченное впустую тепло для замедления автомобиля. Вся эта энергия была просто потеряна для окружающей среды.
К счастью, мы эволюционировали как вид и развились лучше.При рекуперативном торможении двигатель электромобиля используется в качестве генератора для преобразования большей части кинетической энергии, потерянной при замедлении, обратно в энергию, накопленную в аккумуляторной батарее транспортного средства. Затем, в следующий раз, когда автомобиль ускоряется, он использует большую часть энергии, ранее накопленной от рекуперативного торможения, вместо того, чтобы использовать свои собственные запасы энергии.
Важно понимать, что рекуперативное торможение само по себе не является волшебным усилителем дальности действия электромобилей. Само по себе это не делает электромобили более эффективными, а просто делает их менее неэффективными .По сути, самый эффективный способ управлять любым транспортным средством — это разогнаться до постоянной скорости, а затем никогда не касаться педали тормоза. Поскольку при торможении будет отниматься энергия и потребуется дополнительная энергия, чтобы вернуться к скорости, вы получите лучший диапазон, просто никогда не замедляясь.
Но это явно непрактично. Поскольку нам нужно часто тормозить, рекуперативное торможение — следующая лучшая вещь. Это снижает эффективность торможения и просто делает процесс менее расточительным.
Насколько хорошо работает рекуперативное торможение?
Чтобы оценить рекуперативное торможение, нам действительно нужно посмотреть на два разных параметра: эффективность и эффективность . Несмотря на то, что они кажутся похожими, они совершенно разные. Эффективность означает, насколько хорошо рекуперативное торможение улавливает «потерянную» энергию при торможении. Тратит ли он много энергии на тепло или превращает всю кинетическую энергию обратно в накопленную? С другой стороны, эффективность относится к тому, насколько велико воздействие рекуперативного торможения.Заметно ли это увеличивает ваш диапазон, или вы не заметите большой разницы?
КПД
Ни одна машина не может быть эффективна на 100% (без нарушения законов физики), так как любая передача энергии неизбежно приведет к некоторым потерям в виде тепла, света, шума и т. Д. Эффективность процесса рекуперативного торможения зависит от многих транспортных средств, двигателей, аккумуляторов. и контроллеры, но часто бывает где-то около 60-70%. По словам Теслы, регенерация обычно теряет около 10-20% захваченной энергии, а затем автомобиль теряет еще 10-20% или около того при преобразовании этой энергии обратно в ускорение.Это стандартно для большинства электромобилей, включая автомобили, грузовики, электрические велосипеды, электросамокаты и т. Д.
Имейте в виду, что эти 70% не означают, что рекуперативное торможение увеличивает дальность действия на 70%. Это не увеличит ваш диапазон со 100 миль до 170 миль. Это просто означает, что 70% кинетической энергии, потерянной во время акта торможения , можно позже превратить обратно в ускорение.
Вот почему только сообщение об эффективности системы на самом деле мало что значит.Кто-то может быть очень эффективным, когда он работает, но если он работает только час в день, он, вероятно, не добьется многого. Что должно нас больше интересовать, так это эффективность рекуперативного торможения.
Эффективность
Здесь все становится по-настоящему интересным. Эффективность рекуперативного торможения — это мера того, насколько оно может увеличить вашу дистанцию. Увеличивает ли это ваш теоретический диапазон на 5%? 50% дальше? Даже больше?
Как вы, наверное, уже догадались, эффективность рекуперативного торможения значительно зависит от таких факторов, как условия движения, рельеф местности и размер автомобиля.
Условия вождения имеют большое значение. Вы увидите гораздо лучшую эффективность рекуперативного торможения в городском потоке с частыми остановками, чем при движении по шоссе. Это должно иметь смысл, как если бы вы неоднократно тормозили, вы возвращаете гораздо больше энергии, чем если бы вы просто ехали часами, не касаясь педали тормоза. Рельеф также играет здесь большую роль, так как движение в гору не дает большого шанса для торможения, но движение под уклон регенерирует гораздо большее количество энергии из-за длительных периодов торможения.На длинных спусках рекуперативное торможение можно использовать почти постоянно для регулирования скорости при постоянной зарядке аккумулятора.
Размер транспортного средства может быть самым большим фактором эффективности рекуперативного торможения по той простой причине, что более тяжелые транспортные средства имеют гораздо больший импульс и кинетическую энергию. Так же, как большой маховик более эффективен, чем маленький маховик, четырехколесный электромобиль в движении имеет намного больше кинетической энергии, чем электрический велосипед или скутер.
Иногда бывает трудно найти данные для сравнения.Автомобили Tesla показывают мощность рекуперативного торможения, например 60 кВт при резком торможении, но это не отвечает на более интересный вопрос. Мы хотим знать, сколько энергии мы восстанавливаем за поездку, а не насколько сильны наши тормоза каждый раз, когда мы нажимаем на педаль.
К счастью, ряд водителей Tesla отправили данные о вкладе в энергию, используя различные приложения для отслеживания данных. Водители Model S сообщили о возвращении до 32% общего потребления энергии при движении вверх, а затем обратно под гору.Это может эффективно увеличить запас хода автомобиля с 100 миль до 132 миль, например. Владелец модели S P85D сообщил о возмещении примерно 28% энергии (форум на датском языке), а другие сообщили о возвращении от 15 до 20% общего потребления энергии в среднем во время обычных поездок.
Данные приложения LinkMyTesla от водителя Tesla показывают, что примерно 30% энергии аккумулятора восстанавливается с помощью рекуперативного торможения.
Для небольших электромобилей, таких как личные электромобили, цифры не столь оптимистичны.На нескольких электровелосипедах с опциями рекуперативного торможения я обычно составлял в среднем около 4-5% регенерации, а в холмистой местности — максимум около 8%. Другие личные электромобили, в том числе электросамокаты и скейтборды, дают аналогичные результаты, обычно с меньшими однозначными числами. Опять же, имейте в виду, что это не чистая эффективность системы (например, сколько энергии торможения теряется при передаче энергии), а эффективность (например, насколько дальше увеличивается ваш диапазон за счет использования рекуперативного торможения). .
Как я уже упоминал выше, во многом это связано с меньшим весом личных электромобилей. Они просто не обладают большим импульсом и, следовательно, имеют меньше кинетической энергии для преобразования обратно в батарею.
Имеет значение, насколько хорошо работает рекуперативное торможение?
В индустрии электровелосипедов рекуперативное торможение иногда может использоваться скорее как маркетинговый инструмент, чем как функция. Поскольку рекуперативное торможение обычно возможно только в электрических велосипедах с более крупными безредукторными двигателями, такие производители электронных велосипедов будут рекламировать эффективность своих моделей.В то же время производители электровелосипедов со средним приводом и другими мотор-редукторами, неспособными к рекуперативному торможению, сочтут его неэффективным и просто не стоящим.
Большинство электрических велосипедов со средним приводом не способны к рекуперации торможения
Дело в том, что для небольших и личных электромобилей рекуперативное торможение не так эффективно, как в электромобилях, но все же имеет множество преимуществ.
Одно из самых больших преимуществ рекуперативного торможения для небольших личных электромобилей — это дополнительное тормозное усилие.Некоторые PEV, такие как электрический скутер Xiaomi M365, используют только рекуперативное торможение для переднего моторного колеса, полагаясь на традиционный дисковый тормоз для заднего колеса. Это означает, что у скутера есть два независимых тормоза и только один тормозной рычаг для их активации, что снижает стоимость, вес и сложность.
Регенеративное торможение также позволяет использовать тормоза на электрических скейтбордах — подвиг, который ранее был достигнут с использованием функции переменного торможения подошвы вашей обуви на асфальте.С популярными электрическими скейтбордами, такими как Boosted Board, которые развивают скорость более 20 миль в час, электрическое торможение с помощью регенерации является очень желанной функцией безопасности.
Еще одно преимущество рекуперативного торможения — продление срока службы обычных тормозных деталей, таких как тросы и тормозные колодки. Их может раздражать обслуживание и замена, тем более что электрические велосипеды и самокаты путешествуют намного дальше и быстрее, чем их неэлектрические собратья, и в противном случае тормозные колодки изнашиваются намного быстрее.Один из моих электровелосипедов не имеет регенерации из-за того, что у него есть мотор-редукторы, которые вращаются на свободном ходу, и мне кажется, что я всегда настраиваю и регулирую тормоза. Однако на электровелосипедах с функцией рекуперации я обнаружил, что часто могу почти полностью полагаться на рекуперативное торможение, а это означает, что мои тормозные колодки практически не используются.
В конце концов, регенеративное торможение никогда не будет таким эффективным для небольших транспортных средств, как для больших, просто из-за физических свойств. Из-за этого отсутствие регенерации в электронных велосипедах и других PEV не является препятствием для сделки.Однако нельзя игнорировать преимущества рекуперативного торможения, помимо простого возврата энергии. Эй, я возьму бесплатное увеличение диапазона на 5% в любой день!
FTC: Мы используем автоматические партнерские ссылки для получения дохода. Подробнее.
Подпишитесь на Electrek на YouTube, чтобы получить эксклюзивные видео и подписаться на подкаст.
Регенеративное торможение — Energy Education
Рисунок 1. Рекуперативный тормоз. [1]Системы рекуперативного торможения (RBS) представляют собой тип системы рекуперации кинетической энергии, которая переводит кинетическую энергию движущегося объекта в потенциальную или накопленную энергию для замедления транспортного средства и, как следствие, увеличивает топливную эффективность. [2] Эти системы также называют системами рекуперации кинетической энергии. Существует несколько методов преобразования энергии в RBS, включая пружину, маховик, электромагнитный и гидравлический. Совсем недавно появилась гибридная RBS с электромагнитным маховиком. Каждый тип RBS использует свой метод преобразования или хранения энергии, что дает различную эффективность и различные применения для каждого типа.
RBS устанавливаются вдоль трансмиссии или устанавливаются на ведущие колеса транспортного средства, где они препятствуют движению колес с помощью магнитных полей или механического крутящего момента.Эти методы торможения движения позволяют генерировать энергию при торможении, в отличие от фрикционных тормозов, которые просто тратят энергию на замедление транспортного средства, превращая кинетическую энергию в тепловую. Из-за максимальной скорости зарядки механизмов накопления энергии тормозное усилие RBS ограничено. Следовательно, для обеспечения безопасной эксплуатации транспортного средства, когда необходимо резкое торможение, требуется традиционная фрикционная тормозная система. RBS может снизить расход топлива и снизить общую тормозную нагрузку на фрикционные тормоза транспортных средств, уменьшая износ тормозных колодок. [3]
RBS используются почти во всех электромобилях и гибридных электромобилях. Кроме того, в общественном транспорте, таком как автобусы и сверхскоростные экспрессы, используются RBS, чтобы уменьшить воздействие транспортного парка на окружающую среду и сэкономить деньги. [4]
История
Идея тормоза, который мог бы брать кинетическую энергию, которую он поглощает, и превращать ее в потенциальную энергию для дальнейшего использования, возникла с конца 1800-х годов. Некоторые из ранних попыток этой технологии заключались в установке RBS пружинного типа на переднеприводные велосипеды или гужевые кабины. [5] [6]
Железная дорога Баку-Тбилиси-Батуми начала применять RBS в начале 1930-х годов. Это один из примеров раннего использования этой технологии в железнодорожной системе. [6]
В 1950-х годах швейцарская компания Oerlikon разработала автожир, в котором в качестве накопителя энергии использовался маховик. Эффекты гироскопического движения на автобусе вскоре привели к его прекращению. [7]
В 1967 году Американская автомобильная компания (AMC) создала тормоз с рекуперацией электроэнергии для своего концептуального электромобиля AMC Amitron.Toyota была первым производителем автомобилей, внедрившим технологию RBS в серийные гибридные автомобили Prius. [6]
С тех пор RBS эволюционировали для использования почти во всех электрических и гибридных автомобилях, а также в некоторых транспортных средствах, работающих на газе.
Методы преобразования и хранения энергии
Существует несколько методов преобразования энергии в RBS, включая пружину, маховик, электромагнитный и гидравлический. Совсем недавно появилась гибридная RBS с электромагнитным маховиком.Каждый тип RBS использует свой метод преобразования или хранения энергии, что дает различную эффективность и различные применения для каждого типа. В настоящее время наиболее распространенным типом является электромагнитная система. [8]
Электромагнитный
В электромагнитной системе приводной вал транспортных средств соединен с электрическим генератором, который использует магнитные поля для ограничения вращения приводного вала, замедляя транспортное средство и генерируя электричество. В случае электромобилей и гибридных автомобилей вырабатываемая электроэнергия направляется в аккумуляторы, обеспечивая их подзарядку.В транспортных средствах, работающих на газе, электричество можно использовать для питания электроники автомобиля или направить в аккумулятор, где позже оно может быть использовано для придания автомобилю дополнительной мощности. Эта техника в настоящее время используется в некоторых гоночных автомобилях Le Mans Prototype. [9]
Маховик
В RBS с маховиком система собирает кинетическую энергию транспортного средства для вращения маховика, который соединен с приводным валом через трансмиссию и коробку передач. Вращающийся маховик затем может передавать крутящий момент на приводной вал, обеспечивая прирост мощности автомобиля.
Маховик электромагнитный
Электро рекуперативный тормоз маховика представляет собой гибридную модель электромагнитного тормоза и тормозов маховика. Он разделяет основные методы производства электроэнергии с электромагнитной системой; однако энергия накапливается в маховике, а не в батареях. В этом смысле маховик служит механической батареей, в которой можно накапливать и восстанавливать электрическую энергию. [10] Из-за долговечности батарей с маховиком по сравнению с литий-ионными батареями, RBS с электрическим маховиком является более экономичным методом хранения электроэнергии. [11]
Пружина
Подпружиненная система рекуперативного торможения обычно используется на транспортных средствах, приводимых в движение человеком, таких как велосипеды или инвалидные коляски. В пружине RBS спираль или пружина наматываются на конус во время торможения для хранения энергии в виде упругого потенциала. Затем можно вернуть потенциал, чтобы помочь водителю при движении в гору или по пересеченной местности. [12]
Гидравлический
Гидравлический RBS замедляет транспортное средство, вырабатывая электричество, которое затем используется для сжатия жидкости.В качестве рабочего тела часто выбирают газообразный азот. Гидравлические RBS обладают самой продолжительной способностью аккумулировать энергию среди всех систем, поскольку сжатая жидкость не рассеивает энергию с течением времени. Однако сжатие газа с помощью насоса — медленный процесс и сильно ограничивает мощность гидравлического RBS.
Приложения
Гибридные и электрические автомобили
В современных гибридных и электромобилях используется электрический двигатель для приведения в действие автомобиля, что делает применение рекуперативного торможения очень простым и эффективным.В подавляющем большинстве этих автомобилей трансмиссия автомобиля настроена так, что, когда водитель нажимает на тормоза, электродвигатель меняет направление и прикладывает сопротивление к колесам, а не мощность. Затем сопротивление, прикладываемое к колесам, передается через электродвигатель, где оно используется для зарядки аккумуляторов.
В высокопроизводительных электромобилях улучшение ощущения от автомобиля очень важно для производителей автомобилей. Многие клиенты поддерживают электрические суперкары, но против их покупки из-за отсутствия ощущения высокой производительности.Одним из важных аспектов этого ощущения является торможение двигателем. В стандартном двигателе внутреннего сгорания, когда мощность не подается на двигатель, естественное трение внутри двигателя работает, чтобы замедлить транспортное средство. В электромобилях эта сила трения не действует; тем не менее, автомобильные компании, такие как Mercedes и Porsche, начали использовать системы рекуперативного торможения, чтобы дать водителю ощущение автомобиля с бензиновым двигателем, одновременно восстанавливая энергию для аккумуляторов. [13]
Автогонки
В 2009 году Формула 1 (распространенный тип гоночных автомобилей) представила систему рекуперативного торможения, называемую системой рекуперации кинетической энергии (KERS).Поначалу внедрение системы происходило медленно, и в сезоне 2010 года ни одна из команд не использовала ее; тем не менее, улучшения в системе в сезоне 2011 года сделали ее чрезвычайно полезной для автомобилей, и почти все команды приняли ту или иную форму системы. В автомобилях Формулы 1 для хранения энергии при торможении используется система с четырьмя маховиками или электрогенератор. Эта накопленная энергия может быть использована водителем, нажав кнопку на рулевом колесе. FIA ограничивает использование до 6,67 секунды на круг, в течение которых система дает машине дополнительные 81 л.с. [14]
Ограничения
Из-за максимальной скорости перезарядки цепи и емкости аккумулятора тормозное усилие от RBS электромагнитного типа всегда ограничено. Следовательно, для преобразования избыточной энергии транспортного средства требуется традиционная фрикционная тормозная система. Фрикционный тормоз также может предотвратить потерю тормозной способности в случае отказа RBS.
RBS можно устанавливать только на ведущие колеса, поскольку для рекуперации энергии требуется трансмиссия.Отработанное тепло не уменьшается значительно, если автомобиль не является полноприводной.
Добавление RBS к транспортному средству означает увеличение его снаряженной массы. Хотя RBS может улучшить экономию топлива в условиях движения с остановками, оно может отрицательно сказаться на расходе топлива во время движения по шоссе.
Конструкция RBS включает в себя различные датчики и блоки логического управления для настройки работы RBS.
Не следует пренебрегать вопросами надежности этих электрических частей. [15]
Для дальнейшего чтения
Для получения дополнительной информации см. Соответствующие страницы ниже:
Номер ссылки
- ↑ Wikimedia Commons. (3 октября 2015 г.). Flybird Systems KERS [Интернет]. Доступно: https://upload.wikimedia.org/wikipedia/commons/8/8e/Flybrid_Systems_Kinetic_Energy_Recovery_System.jpg
- ↑ М. Боди и К. Маджид, «Метод рекуперативного торможения», 5,707,1151998.
- ↑ Роберт Бош ГмбХ, «Регенеративное торможение Активная безопасность — Регенеративные тормозные системы», Bosch Automotive Technology.[В сети]. Доступно: http://www.bosch-automotivetechnology.com/en/de/component/SF_PC_AS_Regenerative-Braking-Systems_SF_PC_Active-Safety_2575.html. [Доступ: 27 октября 2013 г.].
- ↑ R. Chicurel, «Компромиссное решение для рекуперации энергии при торможении транспортного средства», Energy, vol. 24, вып. 12. С. 1029–1034, январь 1999 г.
- ↑ Б. РИДЕР, «Регенеративная тормозная система для велосипедов», 2340641880.
- ↑ 6,0 6,1 6,2 В. Кларк II и Г. Кук, Глобальные энергетические инновации: почему Америка должна лидировать.Praeger, 2011.
- ↑ Дж. Хэмпл, «Концепция автобуса с механическим приводом», Пер. Трансп. Sci., Т. 6, вып. 1. С. 27–38, январь 2013 г.
- ↑ P. Clarke, T. Muneer и K. Cullinane, «Сокращение выбросов транспортных средств с помощью рекуперативного торможения», Transp. Res. Часть D Пр. Environ., Т. 15, нет. 3. С. 160–167, май 2010 г.
- ↑ «Обзор полной дорожной тестовой машины с приводом от Mercedes-Benz SLS Electric Drive — BBC Top Gear — BBC Top Gear». [В сети]. Доступно: http://www.topgear.com/uk/mercedes-benz/sls/road-test/electric-drive-driven.[Доступ: 2 декабря 2013 г.].
- ↑ Б. Болунд, Х. Бернхофф и М. Лейон, «Энергия с маховиком и системы аккумулирования энергии», Renew. Выдержать. Energy Rev., т. 11, вып. 2. С. 235–258, февраль 2007 г.
- ↑ Дж. Ли, Э. Мерфи, Дж. Винник и П. Коль, «Исследования продолжительности цикла коммерческих литий-ионных батарей при быстром цикле заряда-разряда», J. Power Sources, vol. 102, нет. 1–2, стр. 294–301, декабрь 2001 г.
- ↑ С. Дж. Клегг, «Обзор систем рекуперативного торможения», Лидс, Англия.econ.kuleuven.be, 1996.
- ↑ Обзор полной дорожной тестовой машины с приводом от Mercedes-Benz SLS Electric Drive — BBC Top Gear — BBC Top Gear. (нет данных). Получено с http://www.topgear.com/uk/mercedes-benz/sls/road-test/electric-drive-driven.
- ↑ Formula 1® — Официальный веб-сайт F1®. (нет данных). Получено с http://www.formula1.com/inside_f1/understanding_the_sport/8763.html
- ↑ Дж. Ан, К. Юнг, Д. Ким и Х. Джин, «Анализ системы рекуперативного торможения для гибридных электромобилей с использованием электромеханического тормоза», Int.J.…, т. 10, вып. 2. С. 229–235, 2009.
Что такое рекуперативное торможение? (с иллюстрациями)
Рекуперативное торможение используется на автомобилях для возмещения части энергии, которая теряется при остановке транспортного средства. Эта технология используется в гибридных транспортных средствах, которые используют как газ, так и электричество в качестве источников энергии. Энергия, которая возвращается во время торможения, сохраняется в аккумуляторной батарее и позже используется для питания двигателя всякий раз, когда транспортное средство использует свой источник электроэнергии.
Обычные тормоза.Обычные тормозные системы
В тормозных системах обычных транспортных средств трение используется для противодействия инерции движущегося транспортного средства.Поскольку тормозные колодки трутся о колеса или диск, соединенный с осями, создается чрезмерная тепловая энергия. Эта тепловая энергия рассеивается в воздухе, расходуя до 30 процентов энергии, вырабатываемой автомобилем. Со временем этот цикл трения и потери тепловой энергии снижает топливную эффективность автомобиля. От двигателя требуется больше энергии для восполнения энергии, потерянной при торможении.
Подключаемый гибридный автомобиль с системой рекуперативного торможения.Системы рекуперативного торможения
В гибридных газовых / электрических автомобилях используется совершенно другой метод торможения на более низких скоростях. Гибридные автомобили по-прежнему используют обычные тормозные колодки на скоростях шоссе, но электродвигатели помогают автомобилю тормозить во время движения с остановками и на более низких скоростях.Когда водитель нажимает на обычную педаль тормоза, электродвигатели меняют направление вращения. Крутящий момент, создаваемый этим разворотом, противодействует движению вперед и в конечном итоге останавливает автомобиль.
Вырабатывает электроэнергию
Однако рекуперативное торможение не просто останавливает автомобиль.Электродвигатели и электрические генераторы, такие как автомобильный генератор переменного тока, по сути, являются двумя сторонами одной и той же технологии; оба используют магнитные поля и спиральные провода, но в разных конфигурациях. Системы рекуперативного торможения используют эту двойственность. Когда электродвигатель гибридного автомобиля начинает менять направление движения, он становится электрическим генератором. Вырабатываемая электроэнергия поступает в химическую аккумуляторную батарею и позже используется для приведения в действие транспортного средства на городских скоростях.
Некоторая потеря энергии
Технология, применяемая во время рекуперативного торможения, использует энергию, которая обычно теряется во время торможения, и превращает ее в полезную энергию.Однако гибридный автомобиль — это не вечный двигатель. Энергия по-прежнему теряется из-за трения о поверхность дороги и других стоков в системе. Энергия, собранная во время торможения, не восстанавливает всю энергию, потерянную во время движения. Однако он повышает энергоэффективность и помогает главному генератору переменного тока.
Когда водитель тормозит, система рекуперативного торможения заставляет электродвигатели двигаться в обратном направлении, противодействуя движению вперед.Как работает рекуперативное торможение> ENGINEERING.com
Вращающаяся волна магнитного потока.
Другой способ визуализировать это — представить колесо с четырьмя магнитами, равномерно расположенными вокруг него, и противоположными магнитами, имеющими один и тот же полюс, направленный к центру. Изменив скорость вращения колеса, изменится скорость вращения магнитов. Волна магнитного потока на двигателе работает аналогичным образом, но вместо вращения статора скорость волны магнитного потока изменяется путем изменения частоты подачи электричества.
Как работает рекуперативное торможение в асинхронных двигателях переменного тока
Когда асинхронный двигатель переменного тока работает как двигатель, бегущая магнитная волна на статоре движется быстрее, чем ротор. Следовательно, электрическая энергия теряется в двигателе, поэтому энергия берется из источника питания.
Регенеративное торможение работает с точностью до наоборот. Когда транспортное средство, движущееся вперед, хочет замедлиться, волна магнитного потока должна вращаться медленнее, чем ротор. Для этого частота питания статора уменьшается, поэтому магнитная волна вращается медленнее, чем ротор.Когда магнитная волна движется медленнее, чем ротор, двигатель работает с отрицательным скольжением. Поскольку во время регенерации ротор движется быстрее магнитной волны, относительные силы на роторе и статоре меняются местами. Если крутящие моменты меняются, силы меняются. Мотор начинает генерировать. Но как это может быть?
Электродвижущая сила (ЭДС) в цепи — это толкающая сила, действующая на электроны, интегрированные по всей цепи. При нормальной работе эта движущая сила исходит от источника питания.Электроэнергия используется двигателем, и на нем присутствует напряжение. Во время генерации двигатель подталкивает электроны и увеличивает ЭДС цепи. Эта дополнительная энергия должна быть потеряна, и она теряется в батарее. Аккумулятор набирает энергию и заряжается. В качестве альтернативы, если нет батареи, она будет потеряна в других частях цепи.
Важно понимать, что асинхронный двигатель переменного тока требует источника энергии для регенерации, потому что магнитное поле должно быть наведено на проводники ротора для создания силы.
Рекуперативное торможение в электромобилях
Tesla Model S может вернуть около 60 кВт электроэнергии в аккумуляторную батарею при торможении. Это электронный предел, вероятно, чтобы предотвратить деградацию батареи, поскольку двигатели теоретически могут возвращать больше.
Основы физики говорят нам, что кинетическая энергия транспортного средства увеличивается пропорционально квадрату скорости — удвоение скорости увеличивает кинетическую энергию в четыре раза. Следовательно, если максимальная регенеративная работа, которую может выполнить Tesla, составляет 60 кВт, максимальное замедление транспортного средства будет уменьшаться с увеличением скорости.
График ниже показывает, как скорость замедления Tesla от рекуперативного тормоза может изменяться в зависимости от скорости. Чтобы понять, что означают цифры, в среднем 1 г (9,81 м / с²) замедления замедлит автомобиль с 60 миль в час за 2,73 секунды. Эти числа являются теоретическими замедлениями при постоянной работе 60 кВт. Реальный мир отличается, потому что Tesla, как и другие производители, электронным способом ограничивает скорость замедления своих автомобилей, чтобы предотвратить повреждение аккумулятора.
Пиковое замедление экспоненциально уменьшается со скоростью.Интересно отметить, что когда автомобиль обладает наибольшей кинетической энергией, когда он движется быстро, максимальное замедление от рекуперативных тормозов минимально. Таким образом, вероятно, что значительное количество энергии будет потеряно во фрикционных тормозах, когда транспортное средство тормозит с высокой скорости. Если большую часть времени кто-то водил в условиях медленно движущегося транспорта или в городах, эта проблема решается.
Регенеративное торможение — не волшебная пуля. Ограничения рекуперативного торможения являются следствием неэффективности трансмиссии.Самый эффективный способ вождения — минимизировать использование двигателя и тормозов. Это достигается за счет прогнозирования трафика, а не реакции на него. Audi недавно добавила уведомление на приборную панель для своих более модных автомобилей, которое сообщает вам, когда светофор собирается сменить, если вы находитесь в городе, который делится этой информацией. Эта система может быть адаптирована для повышения эффективности транспортного средства. При приближении к светофору скорость автомобиля можно регулировать, чтобы избежать торможения. Это может помешать вам ускориться к смене света.В качестве альтернативы это может замедлить транспортное средство, поэтому к тому времени, когда вы подъедете к фарам, они будут заменены, сохраняя импульс и снижая потребление энергии.
Где используется рекуперативное торможение ’ т Б / у
Поезда могут многое получить от восстановления кинетической энергии, но обычно этого не происходит, даже несмотря на то, что у них есть магнитные тормоза. Вместо этого тормозная цепь рассеивает энергию в группе резисторов над каретками. Эта энергия теряется в виде тепла в атмосферу при прохождении тока через резисторы.Для хранения энергии поездам потребуются конденсаторы или батареи. В большинстве случаев было решено, что их добавление будет слишком дорогостоящим и сложным. Когда поезда напрямую подключаются к сети через воздушные кабели или третий рельс, они часто возвращают восстановленную мощность в сеть.
Зачем использовать магнитные тормоза, если энергия не восстанавливается? Ответ прост: магнитные тормоза практически не изнашиваются. Для обычных тормозов требуются тормозные колодки, а для электромагнитных — нет.Энергия тратится впустую, но затраты сокращаются за счет того, что материал не стирается, а тормозные колодки заменяются.
Есть еще один тип магнитного тормоза, используемый поездами, работающими на вихревых токах. В них электромагниты расположены чуть выше рельса. Когда поезд хочет замедлить ход, их заводят. Это создает магнитное поле, которое течет в рельс. Поскольку магнитное поле движется, оно индуцирует ЭДС в рельсе, а ЭДС возбуждает вихревые токи, которые представляют собой небольшие циркуляции тока внутри рельса.Они создают магнитные поля, которые взаимодействуют с полем электромагнита. Поле магнита и рельса не стремится разделиться, вызывая своего рода вязкую силу сопротивления. Это нагревает рельс и рассеивает кинетическую энергию поезда. Опять же, это небольшая хитрость для уменьшения механического износа, но на этот раз нет способа восстановить энергию.
Если вы хотите узнать больше о двигателях, мы предлагаем «Основные принципы, типы и применения электрических двигателей и приводов» Остина Хьюга и Билла Друри.
Рекуперативное торможение | Журнал MOTOR
Предыдущие партии «Тормозной цех» касались эксплуатации, технического обслуживания и ремонта «обычных» гидравлических тормозных систем. На этот раз мы сделаем небольшое отступление и рассмотрим работу рекуперативных тормозных систем, их взаимосвязь и взаимодействие с обычными тормозными системами. Начнем с определения терминов.
Что такое рекуперативное торможение? В обычном транспортном средстве с двигателем внутреннего сгорания, когда водитель хочет замедлить или остановиться, он использует педаль тормоза для включения гидравлических тормозов.Тормозные колодки и колодки затем прикладывают трение к тормозным дискам и барабанам. Трение между этими поверхностями замедляет транспортное средство, преобразуя поступательное движение транспортного средства (кинетическую энергию) в тепло и тормозную пыль, которая не используется в окружающей среде. Гибридные и электрические транспортные средства, оборудованные системами рекуперативного торможения, восстанавливают часть этой кинетической энергии во время торможения через электродвигатель / генератор, а затем сохраняют ее в виде электроэнергии в высоковольтной батарее.
Двигатель / генератор создает сопротивление, поскольку он преобразует кинетическую энергию автомобиля в электричество.Это сопротивление (лобовое сопротивление) используется для замедления транспортного средства, так же как гидравлическая тормозная система достигает того же результата за счет трения. Когда в гибридном или электрическом транспортном средстве применяются тормоза, электродвигатель / генератор переключается в режим генератора. Колеса передают кинетическую энергию транспортного средства через трансмиссию к мотору / генератору, который похож на велосипедный генератор, который вращается, опираясь на вращающуюся велосипедную шину. Генератор преобразует часть кинетической энергии велосипеда в электрическую, чтобы питать свет велосипеда.В случае двигателя / генератора кинетическая энергия, преобразованная в электричество, затем сохраняется в высоковольтной батарее.
В то же время сопротивление двигателя / генератора, возникающее при выработке электричества, замедляет движение автомобиля. Когда требуется больший тормозной момент, чем может обеспечить только двигатель / генератор, дополнительное торможение достигается за счет применения обычной гидравлической тормозной системы. Этот процесс известен как рекуперативное торможение. Электродвигатель / генератор транспортного средства может затем использовать эту накопленную энергию (которая в противном случае была бы потеряна) для подачи электроэнергии на электродвигатель для движения и ускорения.
Рекуперативное торможение — один из ключевых факторов повышения энергоэффективности и расширения диапазона движения в параллельных гибридных, последовательных гибридных и чисто электрических транспортных средствах. Регенеративное торможение делает электромобили более подходящими для повседневного использования и снижает расход топлива и выбросы CO 2 и других загрязняющих веществ, особенно в городских дорожных ситуациях, связанных с частым торможением и ускорением гибридных транспортных средств. Кроме того, использование двигателя / генератора для торможения снижает износ тормозов и накопление тормозной пыли.
Во многих ситуациях тормозной мощности двигателя / генератора достаточно, чтобы замедлить движение автомобиля. В результате обычная тормозная система используется меньше. Однако во время очень быстрого замедления, на очень низких скоростях или когда транспортное средство неподвижно, двигатель / генератор не может создать необходимое тормозное усилие для замедления или остановки транспортного средства.
Тормозной потенциал двигателя / генератора зависит от скорости автомобиля. На низких скоростях доступен максимальный тормозной момент. На высоких или очень низких скоростях (непосредственно перед остановкой) невозможно обеспечить достаточный тормозной момент, а это означает, что необходимо активировать обычную тормозную систему.Тормозной момент двигателя / генератора пропорционален выходной мощности двигателя / генератора, а также зависит от состояния заряда высоковольтной батареи. Тормозной момент от двигателя / генератора доступен только тогда, когда высоковольтная аккумуляторная батарея не полностью заряжена.
Системы рекуперативного торможения контролируют взаимодействие между обычными гидравлическими тормозами и двигателем / генератором, чтобы гарантировать эффективную регенерацию энергии. Они также гарантируют, что поведение при замедлении и ощущение педали идентичны обычным тормозным системам.Тормозной момент распределяется между гидравлическими тормозами и двигателем / генератором с учетом безопасности, комфорта и эффективности. Если транспортное средство становится нестабильным, оно обычно замедляется исключительно с помощью гидравлических тормозов, поскольку требуется вмешательство антиблокировочной тормозной системы (ABS) или электронной программы стабилизации (ESP) для конкретных колес.
Это тонкий баланс, который нужно поддерживать. Возможно, вы помните жалобы владельцев на гибриды Prius предыдущего поколения. В некоторых ситуациях (в основном на более низких скоростях) переход от рекуперативного торможения к комбинации рекуперативного и обычного торможения был не совсем гладким, оставляя водителей с неприятным ощущением, что их тормоза не работают должным образом.Эта проблема была устранена путем изменения программного обеспечения.
Логическим развитием этих систем будет полная электрификация тормозной системы. Вместо того, чтобы комбинировать электрическое и гидравлическое торможение в попытке совместить их эффективным и незаметным образом, электрическая тормозная система заменила бы суппорты с электрическим приводом на обычные гидравлические суппорты. Если вы устали заменять ржавые тормозные магистрали и иметь дело с тормозной жидкостью, которая хочет повредить все, с чем соприкасается, это одно из технологических достижений, которое вы, вероятно, приветствуете.Вы можете ожидать более широкого использования тормозных систем этого типа, как только будет продемонстрировано, что они столь же безопасны и эффективны, как и обычные гидравлические системы.
Если двигатель / генератор выполняет частичное или полное торможение транспортного средства на гибридном или электрическом транспортном средстве, какое влияние это окажет на обычную гидравлическую тормозную систему? Если транспортное средство этого типа эксплуатируется в основном в городских условиях, где скорость невысока, а требуемое тормозное усилие также относительно низкое, сверхдлительный срок службы тормозных колодок обязательно будет одним из измеримых, а не нежелательным эффектом.А как насчет других, менее заметных эффектов? Что будет означать сокращение использования гидравлической тормозной системы для работы самих гидравлических тормозов? Будут ли автомобили с системой рекуперативного торможения проявлять больший уровень ржавчины и коррозии и снижать эффективность?
Лучший способ убедиться, что обычная гидравлическая тормозная система на автомобиле, который также оснащен системой рекуперативного торможения, находится в отличном состоянии, — это регулярный осмотр и техническое обслуживание.Как и на обычном автомобиле, стоит регулярно снимать колеса, чтобы убедиться, что все работает должным образом. Что вам следует искать?
Начните с короткого дорожного теста. Нажимая педаль тормоза, проверяйте, нет ли чрезмерного хода и мягкости. Прислушивайтесь к звукам — не только к явному скрежету колодок или обуви, но также к механическим лязгам, лязгам и погремушкам. Пульсирующая педаль обычно указывает на то, что ротор деформирован или барабан имеет неправильную форму.
Затем поднимите капот и проверьте уровень главного цилиндра.Низкий уровень жидкости в резервуаре? Это замкнутая система, поэтому если резервуар низкий, жидкость должна куда-то уходить. Определение того, куда он пошел, будет направлять ваши усилия по обслуживанию.
Если в системе нет утечки, единственное правдоподобное объяснение — износ тормозных накладок. По мере износа тормозных накладок в дисковых тормозных системах поршни суппорта тормозного механизма должны выдвигаться дальше, чтобы компенсировать разницу и удерживать колодки близко к роторам. При выдвижении поршней требуется дополнительная тормозная жидкость, которая отражается на уровне жидкости в главном цилиндре.По мере износа колодок уровень жидкости падает.
В каком состоянии тормозная жидкость в главном цилиндре? Если автомобилю больше нескольких лет, на нем могут скапливаться влага, грязь и шлам. Полигликолевые жидкости (как и обычные тормозные жидкости) гигроскопичны, что означает, что они легко поглощают водяной пар из воздуха. В среднем вода накапливается в тормозной системе со скоростью 1% в год. Даже этого небольшого количества достаточно для понижения точки кипения жидкости, что может привести к блеклости тормозов и снижению производительности.
Снимите колеса и осмотрите тормоза. Убедитесь в отсутствии утечек жидкости, затем измерьте оставшуюся толщину тормозных колодок. Обычно вы можете проверить толщину накладок колодок дискового тормоза через отверстия в суппортах, но вам придется потянуть за барабаны, чтобы проверить накладки на барабанных тормозах.
Тщательный визуальный осмотр роторов часто выявляет глянцевые или обесцвеченные пятна на лицевой стороне ротора, что обычно указывает на коробление. Световые баллы обычно безвредны. Однако то, что вы не видите, но можете измерить, например, чрезмерное биение ротора (часто из-за неравномерного затягивания гаек ударным ключом) и неравномерная толщина, действительно влияет на торможение.
Некоторые производители рекомендуют смазывать ползунки суппортов, которые позволяют «плавающим» тормозным суппортам перемещаться из стороны в сторону. Когда тормоза включены, суппорт немного перемещается в одном направлении. Когда тормоза отпущены, он движется в противоположном направлении. Ползунки также позволяют суппортам постепенно перемещаться в одном направлении, компенсируя износ тормозных колодок.
Теоретически ползуны тормозного суппорта не должны обслуживаться. Их смазывают на заводе, а резиновые сапоги должны удерживать смазку внутри, а воду — снаружи.Если пренебрегать ими достаточно долго, ползунки могут вызвать необычные симптомы торможения. Это одна из областей, где недостаточное использование или использование не по назначению может вызвать проблемы с гибридным или электрическим транспортным средством.
В большинстве плавающих тормозных суппортов используется резиновый или пластиковый изолятор или прокладка вокруг крепежных болтов суппорта. Высокотемпературная среда тормоза может привести к тому, что эта втулка потеряет упругость или станет плоской, придав ей овальную форму, что приведет к чрезмерному перемещению суппорта. Это может вызвать дребезжание и удары, когда тормоза не задействованы.Затронутый тормоз может также работать неравномерно, что приведет к натяжению. Ослабленные болты или изношенные крепежные детали могут вызвать взведение суппорта при установке.
Пока вы проверяете плавность работы ползунов суппорта, проверьте другие компоненты тормоза. Циклы нагрева и охлаждения тормозов могут ослабить пружины и зажимы, предотвращающие грохот. Слабое оборудование может привести к чрезмерному перемещению или заеданию суппорта / колодки, вызывая шум и другие проблемы.