Управление частотой вращения асинхронного двигателя: Самый экономичный способ управления двигателями – преобразователь частоты
Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.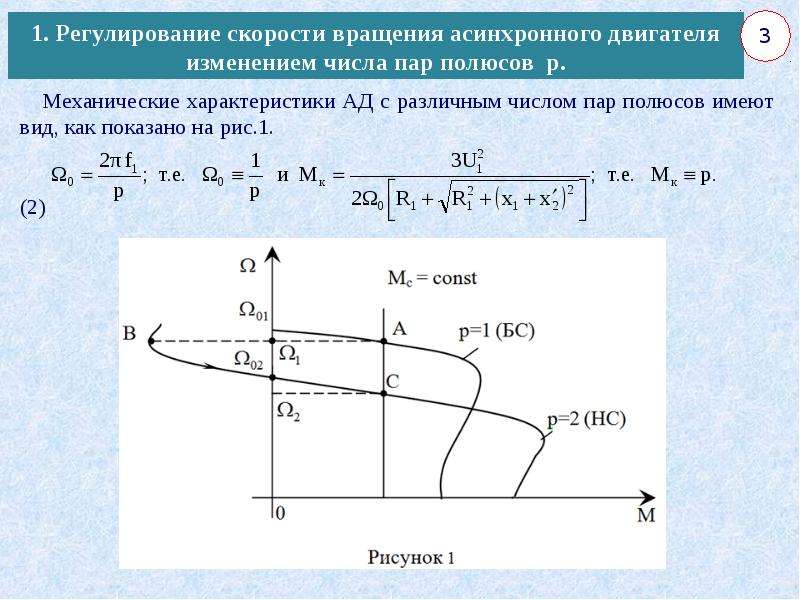
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателямиПреобразователи частоты для ваших приводов
Являясь одним из ведущих изготовителей приводной техники, к нашим механическим компонентам мы, конечно же, предлагаем и подходящую преобразовательную технику. Мы разрабатываем и производим приводные преобразователи и преобразователи частоты для управления и регулирования приводов в машинах и установках. И это не только для централизованного монтажа в электрошкафу или для настенного монтажа, но и для децентрализованного монтажа.
Что такое преобразователь частоты?
Преобразователи частоты – это электронные устройства, которые позволяют регулировать частоту вращения асинхронного двигателя. Обоснование: Если электрические машины или асинхронные двигатели работают непосредственно от сети переменного напряжения, у них есть только одна фиксированная частота вращения – в зависимости от числа полюсов и частоты местной электросети. Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Однако если приводной системе или производственному процессу требуется изменяемое переменное напряжение, т. е. регулируемая скорость, то применяются преобразователи частоты. Из фиксированного переменного напряжения они могут вырабатывать переменное напряжение с изменяемой амплитудой (величиной выходного напряжения) и частотой.
Как работает преобразователь частоты?
>Преобразователь частоты подключается перед двигателем, чтобы создавать соответствующее потребностям, изменяемое переменное напряжение. Таким образом, уже не электросеть создает частоту и величину напряжения, с которыми работает двигатель, а преобразователь частоты берет на себя эту задачу и регулирует выходную частоту и выходное напряжение.
Большое преимущество преобразователя частоты? С его помощью вы плавно изменяете частоту вращения двигателя почти от нуля до нужного номинального уровня и заметно расширяете ее диапазон. При этом вращающий момент двигателя остается неизменным. Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
Таким образом пользователи оборудования всегда могут адаптировать свою приводную технику к текущим условиям. Кроме того, преобразователь частоты позволяет быстро менять направление вращения. Чтобы изменить порядок следования фаз, достаточно простого управляющего сигнала. После этого подключенный асинхронный двигатель будет работать в противоположном направлении.
Какие типы преобразователей существуют?
Бывают преобразователи с управлением по току и с управлением по напряжению. В работе они различаются следующим образом:
- Преобразователи частоты с управлением по току поддерживают отношение тока к частоте (I/f) всегда постоянным и применяются в верхнем мегаваттном диапазоне.
- А в нижнем мегаваттном и в киловаттном диапазонах последним словом техники являются преобразователи частоты с управлением по напряжению. Они поддерживают на постоянном уровне отношение напряжения к частоте: То есть если двигатель, рассчитанный на напряжение 230 В и частоту 50 Гц, должен работать с частотой 25 Гц, то и напряжение уменьшается вдвое до 115 В.
Проще говоря, в преобразователе частоты с управлением по напряжению происходит следующее: На входе имеется выпрямитель, который преобразует переменное напряжение электросети в постоянное напряжение. Затем это постоянное напряжение сглаживается и стабилизируется звеном постоянного тока. Далее действующий со стороны двигателя инвертор генерирует переменное напряжение с выходной частотой, необходимой для приводной системы. Получаемое при этом отношение „напряжение/частота“ определяет необходимую частоту вращения двигателя. Задание или расчет необходимой частоты вращения выполняет встроенный блок управления, который соединяет друг с другом все компоненты.
Где применяются преобразователи?
Преобразователи частоты используются в самых разных отраслях и задачах промышленности. Будь то приводы насосов и вентиляторов, обрабатывающих станков, конвейеров и сборочных линий, кранов или роботизированных систем: представить себе промышленное производство без преобразователей частоты уже невозможно. Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Ведь там адаптированная или непрерывно регулируемая частота вращения обеспечивает оптимизированные технологические процессы – с тем дополнительным преимуществом, что приводы с регулированием частоты вращения способствуют экономии энергии при работе
Преобразователи для любых установок и машин
В зависимости от спроса и требований наши преобразователи частоты доступны в различных исполнениях и с множеством дополнительных функций. К тому же очень важно, где нужно разместить преобразователь частоты – на стене, в центральном и защищенном месте в электрошкафу или прямо в цеху, то есть децентрализованно. И в зависимости от того, насколько проста или сложна та или иная приводная система, применяются либо простые преобразователи частоты, либо так называемые специальные преобразователи с большим объемом функций или многоосевые сервоусилители
SEW-EURODRIVE был первой компанией, которая разработала децентрализованную технику и вывела на рынок соответствующие преобразователи частоты и мехатронные приводы. С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
С их помощью пользователи оборудования значительно сокращают затраты на монтаж и создают себе много возможностей для модульного построения своих систем, независимых от электрошкафа. Кроме того, в нашем ассортименте в области преобразовательной техники есть устройства рекуперации энергии в сеть, которые комбинируются с одним или несколькими преобразователями частоты и приводными преобразователями. Также мы предлагаем простые пускатели двигателя для встраивания в
Преобразователи частоты для монтажа в электрошкафу
От простого преобразователя до стандартного или специального преобразователя и далее до модульного сервопреобразователя – мы предлагаем вам широкий ассортимент приводной электроники для централизованного размещения в электрошкафу или распределительном щите:
Преобразователи частоты для настенного монтажа
Еще одна и при этом менее затратная возможность централизованного размещения преобразователей частоты – это настенный монтаж.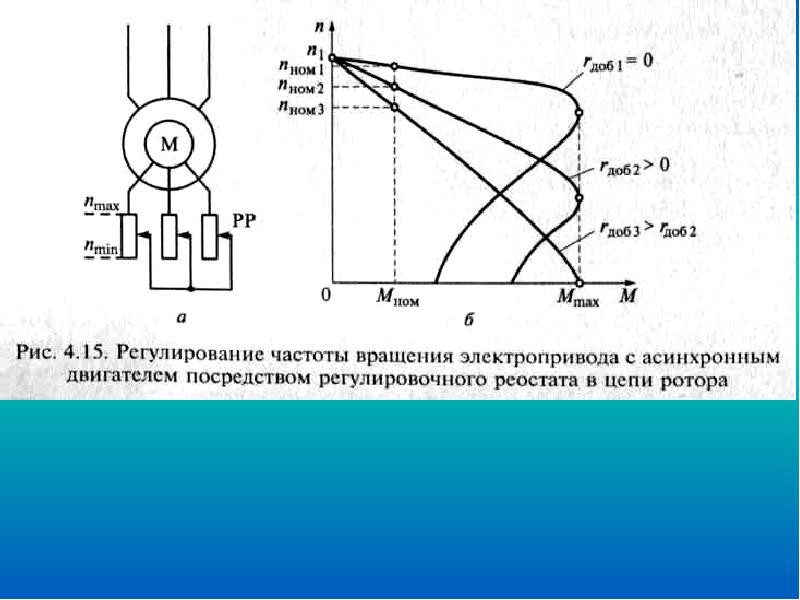 Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Он всегда используется в тех случаях, когда приобретать дорогой электрошкаф нерационально. Наши преобразователи частоты, которые подходят для такого способа монтажа, имеют соответствующую степень защиты от IP 54 до IP 66 (для пыльных и влажных условий окружающей среды).
Пускатели двигателя для децентрализованного монтажа
Достаточно ли для вашей приводной системы функции именно преобразователя? Или вам нужно простое включение/выключение двигателя или переключение направления вращения двигателя с левого на правое? Подходящие продукты в ассортименте SEW-EURODRIVE найдутся и для этого случая:
Преобразователи частоты для децентрализованного монтажа
Для размещения вашей приводной электроники рядом с двигателем или мотор-редуктором мы предлагаем широкий выбор преобразователей частоты: от простого преобразователя с настройкой темпа для надежного применения в простых системах до стандартного преобразователя с расширенными функциями регулирования и далее до свободно программируемого специального преобразователя для систем сложной архитектуры. А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
А если вам нужно децентрализованным образом реализовать многоосевые перемещения, а также системы с цепочкой рабочих модулей, то лучшим выбором будут многоосевые сервоусилители. Децентрализованные преобразователи в нашем ассортименте:
Частотные преобразователи для промышленных электродвигателей, частотные регуляторы для насосов и вентиляторов
Частотные преобразователи и устройства плавного пуска для асинхронного электродвигателя это высокотехнологичное оборудование, позволяющее не только экономить электроэнергию и снижать нагрузку на оборудование и электрические сети вашего производства, а так же значительно снизить нагрузку на всю электрическую сеть нашей страны.
Наша компания относительно недавно на рынке регулируемого электропривода, но на протяжении этого времени зарекомендовала себя как надежный и качественный поставщик, о чем свидетельствуют отзывы наших партнеров, о которых есть информация на нашем сайте. Это конечно не все кто приобрел наше оборудование, по Вашему запросу мы готовы предоставить любые имеющиеся рекомендации. В производстве нашего оборудования используются комплектующие ведущих мировых производителей электронных компонентов и модулей, проверенных временем и тяжелыми условиями эксплуатации. Мы осуществляем модульную сборку своих приборов в России.
В производстве нашего оборудования используются комплектующие ведущих мировых производителей электронных компонентов и модулей, проверенных временем и тяжелыми условиями эксплуатации. Мы осуществляем модульную сборку своих приборов в России.
В распоряжении ООО «Лидер» имеется штат квалифицированных специалистов, а так же оборудование позволяющее тестировать преобразователи частоты и устройства плавного пуска в различных режимах, что позволяет гарантировать их надежность и работоспособность перед отгрузкой конечному потребителю. В настоящее время очень много предложений на рынке аналогичной продукции, может быть и по более привлекательной цене, но как показывает практика низкая цена, не всегда гарантирует заявленное качество оборудования и сервисного обслуживания. Мы не навязываем собственный продукт! Мы рекомендуем покупать продукцию ООО «Лидер». Конечный выбор за Вами!
Ниже представлены три линейки частотных преобразователей, каждая из которых содержит в себе весь спектр мощностей от 0,75 кВт до 630 кВт.
Серия А300 — для общепромышленной нагрузки
Общепромышленная серия преобразователей частоты подходит для оборудования с тяжелым пуском и высокой нагрузкой (станки, экструдеры, куттеры, компрессоры, конвейеры, погружные насосы и мн. др.). Преобразователь частоты с высокоточным пусковым моментом при низких скоростях (пусковой вращающий момент: 0.5Hz/150% (векторное управление), 1Hz/150% (U/f)), встроенным ПИД-регулятором (см. инструкцию по настройке), функции полной защиты двигателя с возможностью изменять параметры настройки, съемным выносным пультом управления, повышенным перегрузочным моментом до 200%, автоматическим подъемом крутящего момента, функцией коррекции скольжения, автоматическим регулированием напряжения (AVR) и встроенным интерфейсом RS-485.
Преобразователь частоты серии А300 имеет съемный пульт управления и может использоваться удаленно, до 60 метров от частотного преобразователя по витой паре без переходников и дополнительных модулей, усилителей сигнала.
Серия В600 — для вентиляторной нагрузки (Снят с производства)
Специальная вентиляторная серия преобразователей частоты предназначена для управления электродвигателями насосов, вентиляторов, дымососов и прочего оборудования. Инвертор имеет высокоточный пусковой момент при низких скоростях, встроенный ПИД-регулятор, функции полной защиты двигателя с возможностью изменять параметры настройки, перегрузочный момент до 180%, автоматический подъем крутящего момента, функцию коррекции скольжения, съемный выносной пульт управления, автоматическое регулирование напряжения (AVR) и встроенный интерфейс RS-485 (протокол Modbus-RTU)
В частотных преобразователях серии В600 мощностью от 18.5 кВт установлен двухстрочный пульт управления, который позволяет отслеживать два параметра одновременно.
Серия B601 — для вентиляторной нагрузки
Улучшенная серия для управления электродвигателями насосов, вентиляторов, дымососов и прочего оборудования. Инвертор имеет высокоточный пусковой момент при низких скоростях, Векторное управление, встроенный ПИД-регулятор, функции полной защиты двигателя с возможностью изменять параметры настройки, перегрузочный момент до 160%-1с, автоматический подъем крутящего момента, функцию коррекции скольжения, несущая частота 1-16 кГц, выходная частота 0-600Гц, съемный выносной пульт управления, автоматическое регулирование напряжения (AVR) и встроенный интерфейс RS-485 (протокол Modbus-RTU)
Серия B60 mini (Снят с производства)
Серия Мини используется для регулирования приводов с асинхронным электродвигателем,
предназначена для управления приводами насосов, вентиляторов, лентопротяжных машин,
транспортёров миксеров и т. д — для использования в системах малой автоматизации.
д — для использования в системах малой автоматизации.
Что такое преобразователь частоты и для чего он нужен?
Для регулирования работы асинхронного двигателя с целью не допустить снижения его КПД применяют специальные устройства – частотные преобразователи. Их работа заключается в том, что они плавно изменяют скорость вращения двигателя, с помощью смены частоты питающего напряжения.
В данной статье мы постараемся рассмотреть ряд незаметных, на первый взгляд, особенностей в работе асинхронного электродвигателя и проанализируем, насколько важно в ходе его эксплуатации использовать частотный преобразователь.
Что может привести к неисправности?
В асинхронном двигателе напряжение для работы чаще всего поступает через последовательно включенный автоматический выключатель. То сесть данный способ запуска двигателя по другому называется — плавный пуск. Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Таким образом это провоцирует высокий рост тока пусковой обмотки, что для оборудования закончится весьма плачевно.
Частотный преобразователь имеет к этому важное отношение – он контролирует ток электродвигателя. Формируя необходимое напряжение нужной амплитуды и частоты, частотник подает их на двигатель. Поясним – в процессе его запуска преобразователь отдает не полную частоту, скажем, в 50 Герц, а где-то 0,1Гц (или чуть больше). То же самое и с напряжением – не все 220 В или 380 В, а около 20-30 (смотря, какие выставлены настройки).
Принцип работы преобразователя частоты для электродвигателя
Все это позволяет пропускать через обмотку статора ток оптимального значения, не выше номинального показателя, чтобы создать магнитное поле, которое, в свою очередь, вместе с созданным в обмотке током создаст крутящий момент. Что касается принципов изменения характеристик напряжения, то подробно об этом, а также о критериях выбора частотника, вы можете прочесть здесь, в одной из других наших статей. Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Кстати, если говорить о критериях выбора, то отметим также, что выходные токи преобразователя частоты должны быть ниже тока полного режима нагрузки.
Выше мы описывали старт двигателя. Что касается разгона, то в ходе этого процесса преобразователь плавно повышает частоту и величину поступаемого напряжения, тем самым разгоняя двигатель. Главное – настроить частотник таким образом, чтобы времени на разгон уходило как можно меньше, а ток обмотки статора не был выше её номинального значения. Кроме того, важно поддерживать достаточный крутящий момент на валу.
Почему без преобразователя не обойтись? Главные преимущества его использования
Итак, преобразователь частоты дает следующие преимущества при управлении асинхронным двигателем:
- Плавный пуск и остановка электропривода
- Управление производительностью оборудования
- Установка оптимальных режимов работы
- Взаимное согласование электроприводов в сложных системах
Самые важные – это 1 и 2 пункты. Почему именно они?
Почему именно они?
Плавный пуск позволяет наращивать скорость постепенно, что позволяет не допустить скачков тока. Неконтролируемые скачки опасны, так как при прямом пуске они превышают номинальные показатели в 5-7 раз, что может спровоцировать высокую нагрузку на электросеть, защитит оборудование от перегрузок и сэкономит деньги на затратах электроэнергии.
Что касается управления производительностью, то в этом случае преобразователь частоты контролирует скорость работы электродвигателя с учетом «реальных нужд» в системе в целом. Это также помогает напрасно не тратить энергию и гарантирует её экономию в 30-60%.
Помимо 4-х основных преимуществ описанных выше, использование преобразователя обеспечивает следующие преимущества:
- Понижение величины пусковых токов в 4-6 раз
- Регулировка частоты и напряжения с экономией до 50% электроэнергии
- Самостоятельное выключение контактора, снятие напряжения и с его плавной подачей в звено постоянного тока
- Устранение ударных нагрузок, защита двигателя от механической перегрузки, либо недогрузки
- Понижение общего числа ненужных отключений при ударных нагрузках
- Обеспечение нужной величины и частоты при запуске оборудования, поддержание обратной связи смежных приводов
- Контроль скорости вращения ротора и анализ работы двигателя
Классификация частотных преобразователей
В первую очередь, данные устройства различаются по режимам работы:
- Амплитудно-частотное регулирование (скалярное) – применяются в обычных установках с вентиляторами, насосами, тележками, транспортерами и т. д. где не требуется стабилизация оборотов двигателя
- Векторное регулирование – используются на любом оборудовании, где возможны резкие изменения крутящего момента на валу, причем в большом диапазоне и где нужна высокая стабильность оборотов на валу электродвигателя.
 д. где не требуется стабилизация оборотов двигателя
д. где не требуется стабилизация оборотов двигателяПо типу питания:
- Низковольтный 0,4 кВ
- Среднее напряжение 0,69 кВ
- Высоковольтный 6 и 10 кВ
Также данные устройства бывают с промежуточным звеном (связью) и без него. О характере работы таких устройств читайте тут, в ещё одной нашей статье.
Настройка
Настройка преобразователей выполняется строго по инструкции производителя и с учетом особенностей задачи, которая решается посредством оборудования, в котором установлен двигатель.
Например, если применяется асинхронный двигатель скалярного типа, то амплитуду сигнала и выходную частоту устанавливают по определенной формуле. Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Для других видов двигателя обычно используют датчики скорости вращения вала двигателя. Последовательность этапов алгоритма настройки мы перечислили здесь, в другом нашем материале.
Можно ли отказаться от частотных преобразователей?
Можно. Но лучше этого не делать. Безусловно, скорость вращения можно также регулировать и при помощи гидравлической муфты или механического вариатора и других. Но данные приспособления неэкономичны (а в промышленности это крайне важно!), у них узкий диапазон регулирования, что доставляет серьезные неудобства в ходе эксплуатации, а также они гораздо быстрее выйдут из строя.
Итоги: почему нужно использовать преобразователи частоты?
Вот основной перечень преимуществ для работы оборудования, которые вы получаете, используя преобразователи:
- Плавный пуск и плавную остановку оборудования
- Эффективную защиту от перегрузок и бросков напряжения
- Возможность эксплуатации оборудования с большими номинальными сетевыми напряжениями и токами
- Понижение энергопотребления
- Стабильность технологического процесса и улучшение КПД
Итак, это наиболее важная информация о частотных преобразователях, которую мы хотели до вас донести. В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
В завершение скажем о том, от чего зависит стоимость и на что стоит обращать внимание при выборе. Это такие факторы, как марка производителя, модель и тип управления преобразователем. Также стоит обращать внимание при выборе на тип и уровень мощности двигателя, его диапазон и точность, а также степень точности поддержки крутящего момента.
Скалярное управление
Дмитрий Левкин
Скалярное управление (частотное) — метод управления бесщеточным электродвигателем переменного тока, который заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (В/Гц) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.Отношение В/Гц вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения В/Гц мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.
Если отношение В/Гц увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в недовозбужденном состоянии.
Зависимость частоты питания двигателя от времени при скалярном упрравлении
Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение В/Гц на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями.
В применении к асинхронным двигателям
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.
Для поддержания постоянного магнитного поля в зазоре, отношение В/Гц должно быть постоянным на разных скоростях.
Скалярное управление без датчика скорости
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения [2].
Скалярное управление с датчиком скорости
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для приложений, где нет переменной нагрузки и не требуется хорошая динамика (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения.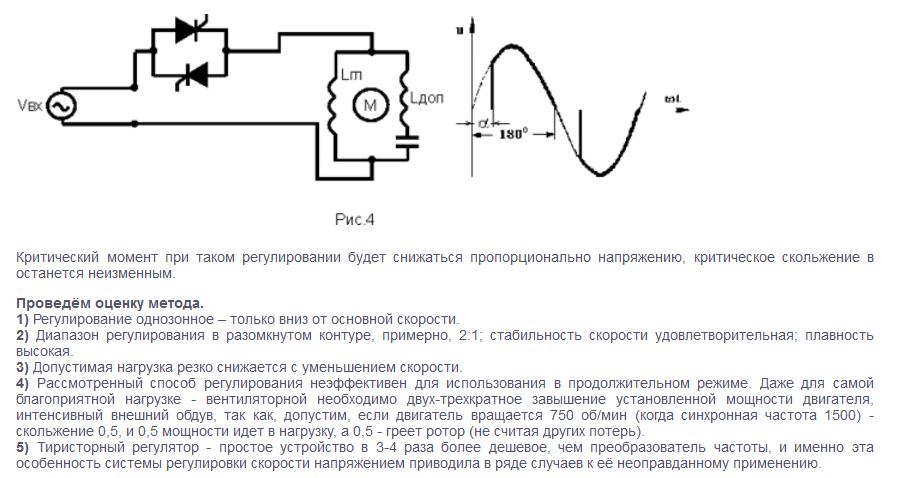 Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
СДПМ со скалярным методом управления может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для контроля СДПМ на низких оборотах для приложений, требующих высокую динамику [1].
- Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
- во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
- во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
- также нельзя управлять одновременно моментом и скоростью.
 Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
Регулятор скорости вращения асинхронного электродвигателя | Электирика
» Электирика
Регуляторы скорости, запуск и торможение двигателей
Эта статья будет посвящена двигателям — возможности регулировки скорости вращения, запускам и торможению.
Однофазные конденсаторные электродвигатели отличаются от однофазных асинхронных электродвигателей с пусковой обмоткой и конденсаторным пуском тем, что рабочая и фазосдвигающая (конденсаторная) обмотки создают вращающееся магнитное поле как в момент пуска, так и при работе электродвигателя. Обе обмотки рассчитаны на длительный режим работы.
Обе обмотки рассчитаны на длительный режим работы.
Одна из схем регулятора скорости для однофазного конденсаторного двигателя показана на рис.1.
Действие данного регулятора скорости вращения основано на зависимости скорости вращения от величины постоянного тока через фазосдвигающую (конденсаторную) обмотку. Выпрямленное диодом VD1 напряжение через резисторы R1, R2, R3 подается на фазосдвигающую обмотку.
Фазосдвигающий конденсатор служит одновременно для фильтрации выпрямленного напряжения, величину которого регулируют подстроечным резистором R1.
Минимальная скорость вращения зависит от надежного запуска двигателя и выставляется резистором R2. Для этого необходимо отключить двигатель, вывести резистор R1 в положение максимального сопротивления, а на место R2 временно установить переменный резистор на 2-3кОм. Желательно тоже вывести в максимальное положение. Включить в сеть и резистором R2 установить минимально возможные обороты. Далее выключить его на небольшое время и попытаться его запустить с выставленным таким способом сопротивлением R2.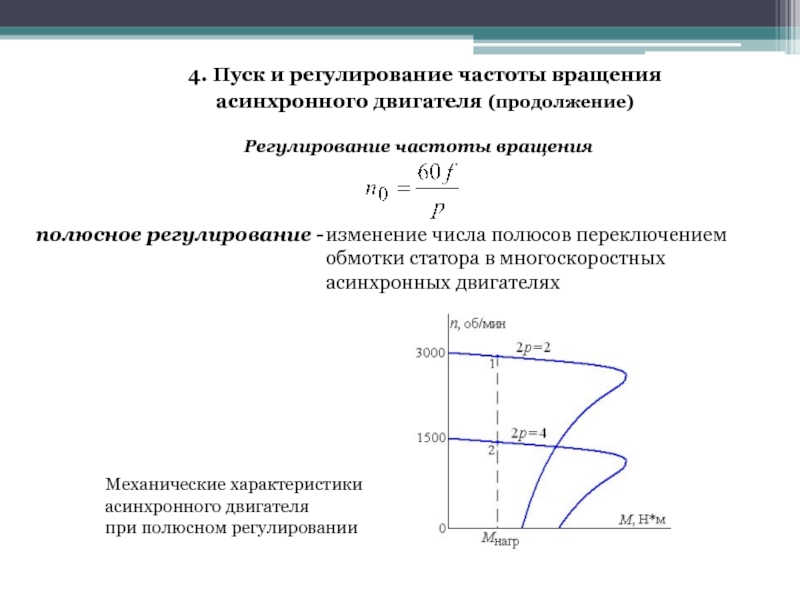 Если самостоятельного пуска не происходит — уменьшить еще немного сопротивление R2. Пробовать до тех пор, пока не произойдет самостоятельного надежного пуска. После этого можно измерть значение R2 и заменить его постоянным резистором. Если двигатель очень малой мощности, можно уменьшить значение R1.
Если самостоятельного пуска не происходит — уменьшить еще немного сопротивление R2. Пробовать до тех пор, пока не произойдет самостоятельного надежного пуска. После этого можно измерть значение R2 и заменить его постоянным резистором. Если двигатель очень малой мощности, можно уменьшить значение R1.
Рекомендуемые детали : Резистор R1 типа ППЕ-3В или ППБ-15Е R1 и R2 — ПЭВ-7,5 VD1 — КД227Ж или с похожими параметрами С1 — штатный конденсатор данного двигателя.
* по материалам статьи В.Ф. Яковлева Регулятор скорости для однофазных конденсаторных двигателей
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя. изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
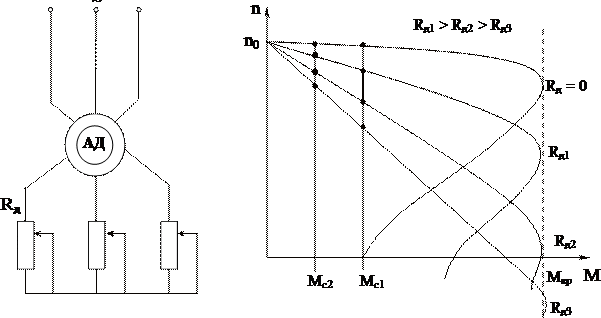
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3). 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
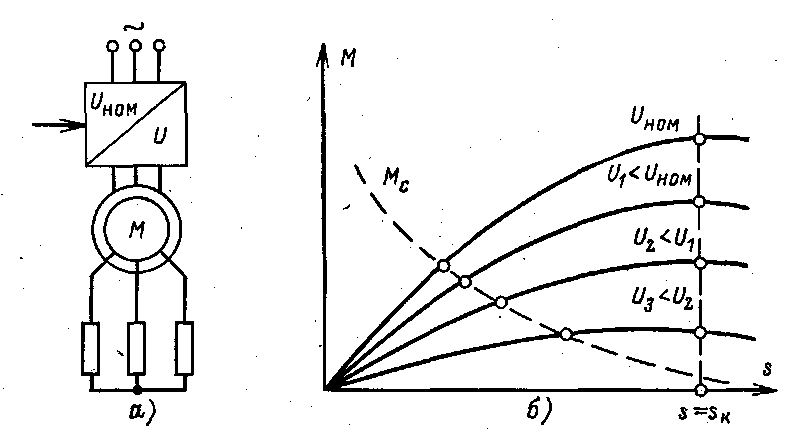
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя. позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.
3 ), а скольжение от U рег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем. выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.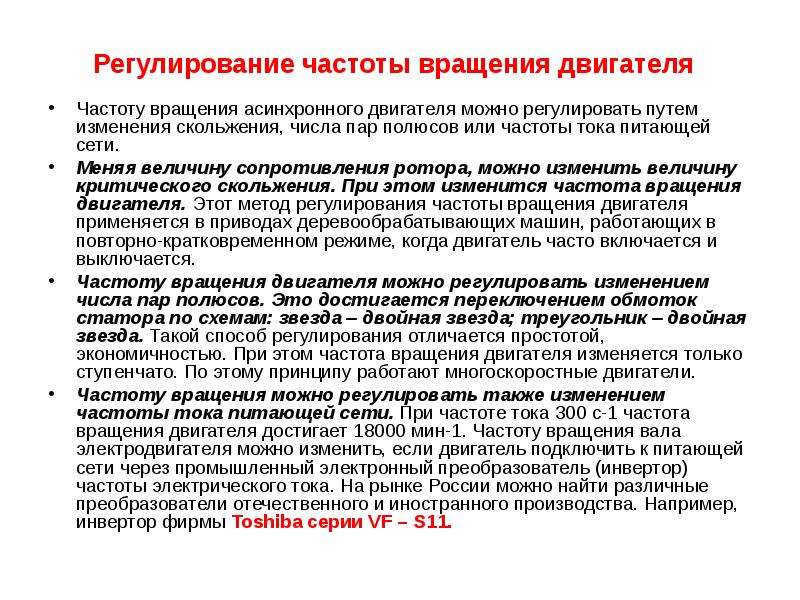
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30). 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.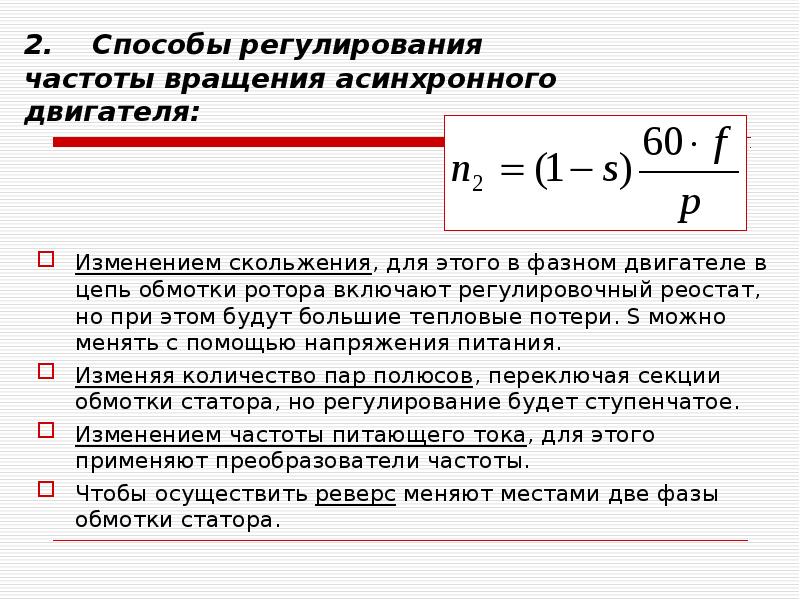
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов.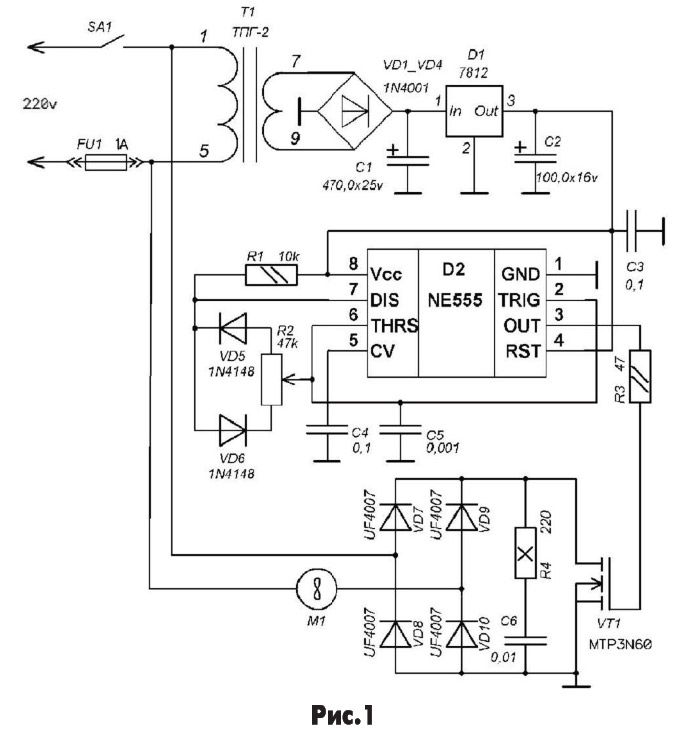 В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А. Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120 . Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120 . Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2. 1 = р2. pt. 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2. 1 = Рг. Pi. 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
pt. 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2. 1 = Рг. Pi. 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Источники: http://slavapril.narod.ru/upravlenie_dvig.html, http://electricalschool.info/spravochnik/maschiny/661-regulirovanie-skorosti-.html, http://ukrlot.com/regulirovanie_asinhronnogo_dvigatel.html
Комментариев пока нет!
Преобразователь частоты. Устройство, принцип работы, схемы управления и расчеты преобразователя частоты, инвертора
Содержание:В асинхронных электрических двигателях возникает необходимость регулировки частоты вращения ротора. С этой целью используется частотно-регулируемый привод, основным элементом которого является частотный преобразователь.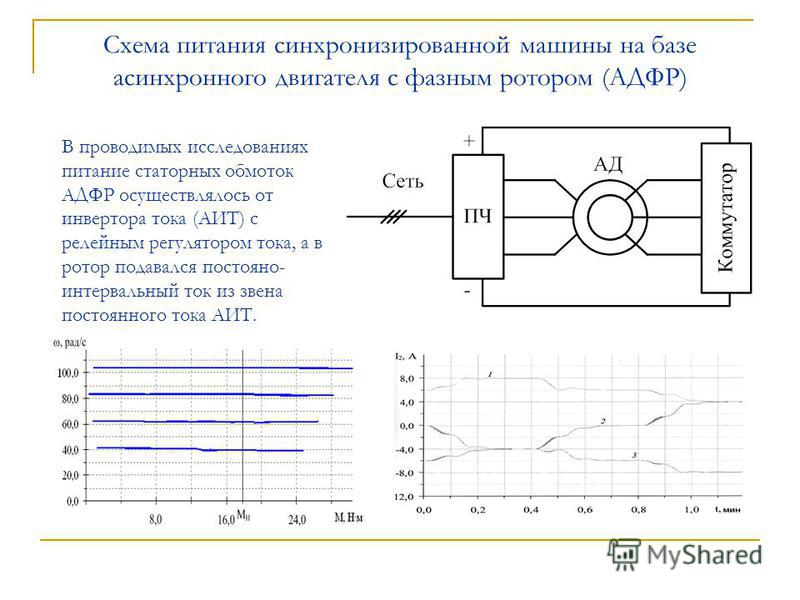 В его конструкцию входит мост постоянного тока, он же — выпрямитель, преобразующий промышленный переменный ток в постоянный. Другая важная деталь — инвертор, выполняющий обратное преобразование постоянного тока в переменный с необходимой частотой и амплитудой.
В его конструкцию входит мост постоянного тока, он же — выпрямитель, преобразующий промышленный переменный ток в постоянный. Другая важная деталь — инвертор, выполняющий обратное преобразование постоянного тока в переменный с необходимой частотой и амплитудой.
Принцип работы частотно регулируемого привода
Асинхронные двигатели широко применяются в промышленности и на транспорте, являясь основной движущей силой узлов, машин и механизмов. Они отличаются высокой надежностью и сравнительно легко поддаются ремонту.
Однако данные устройства могут вращаться только на одной частоте, которую имеет питающая сеть переменного тока. Для работы в различных диапазонах используются специальные устройства — частотные преобразователи, выполняющие регулировку частот до требуемых параметров.
Работа преобразователей тесно связана с принципом действия асинхронного двигателя. Его статор состоит из трех обмоток к каждой из которых подведен электрический ток, создающий переменное магнитное поле.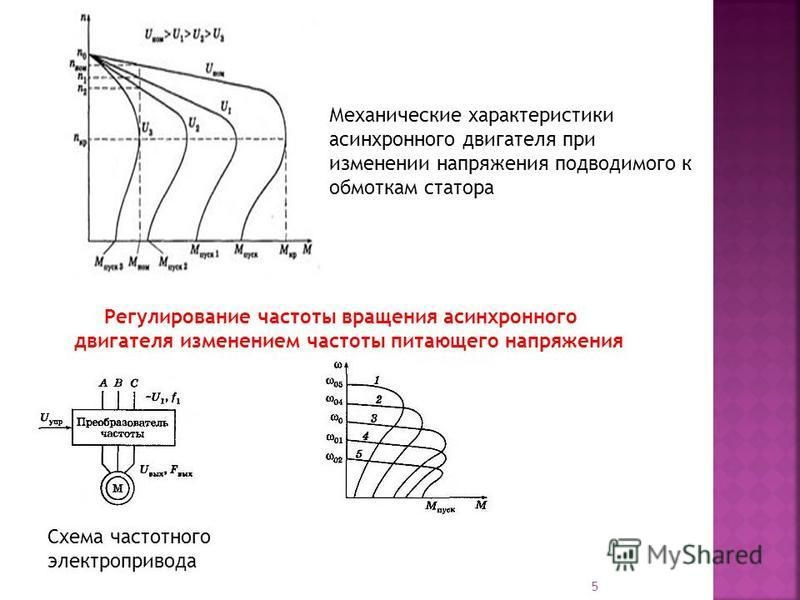 Под действием этого поля в роторе индуцируется ток, который также приводит к возникновению магнитного поля. В результате взаимодействия полей статора и ротора, начинается вращение ротора.
Под действием этого поля в роторе индуцируется ток, который также приводит к возникновению магнитного поля. В результате взаимодействия полей статора и ротора, начинается вращение ротора.
Когда асинхронный двигатель запускается, происходит значительное потребление тока от питающей сети. Из-за этого привод механизма испытывает значительную перегрузку. Наблюдается скачкообразное стремление двигателя достичь номинальных оборотов. В результате, снижается срок службы не только самого агрегата, но и тех устройств, которые он приводит в действие.
Данная проблема успешно решается путем использования частотно регулируемого привода, позволяющего изменять частоту напряжения, питающего двигатель. Применение современных электронных компонентов делает эти устройства малогабаритными и высокоэффективными.
Принцип работы частотного преобразователя достаточно простой. Вначале осуществляется подача сетевого напряжения к выпрямителю, где происходит его трансформация в постоянный ток. Затем он сглаживается конденсаторами и поступает на транзисторный преобразователь. Его транзисторы в открытом состоянии обладают крайне малым сопротивлением. Их открытие и закрытие происходит в определенное время при помощи электронного управления. Происходит формирование напряжения, аналогичного трехфазному, когда фазы смещаются относительно друг друга. Импульсы имеют прямоугольную форму, однако это совершенно не влияет на работу двигателя.
Затем он сглаживается конденсаторами и поступает на транзисторный преобразователь. Его транзисторы в открытом состоянии обладают крайне малым сопротивлением. Их открытие и закрытие происходит в определенное время при помощи электронного управления. Происходит формирование напряжения, аналогичного трехфазному, когда фазы смещаются относительно друг друга. Импульсы имеют прямоугольную форму, однако это совершенно не влияет на работу двигателя.
Частотные преобразователи имеют большое значение при работе . При такой схеме подключения необходимо использование фазосдвигающего конденсатора для создания вращающего момента. Эффективность агрегата заметно падает, однако частотный преобразователь увеличить его производительность.
Таким образом, применение частотно регулируемого электропривода делает управление трехфазными двигателями переменного тока более эффективным. В результате, улучшаются производственные технологические процессы, а энергоресурсы используются более рационально.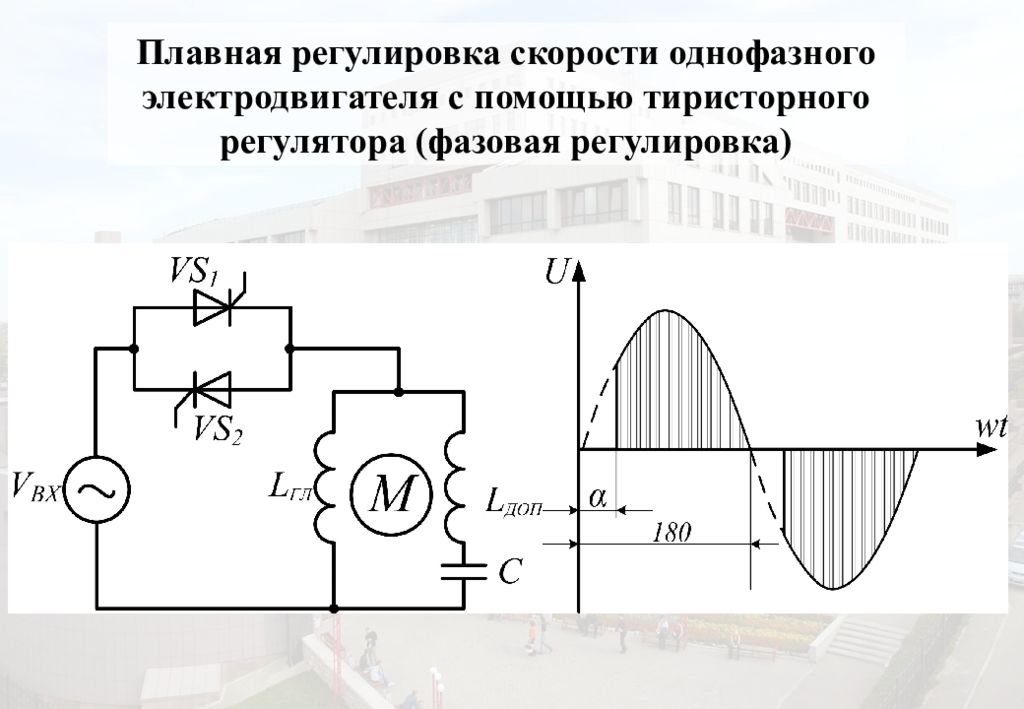
Преимущества и недостатки устройств регулировки частоты
Данные регулировочные устройства обладают несомненными достоинствами и дают высокий экономический эффект. Они отличаются высокой точностью регулировок, обеспечивают пусковой момент равный максимальному. При необходимости электродвигатель может работать с неполной нагрузкой, что позволяет существенно экономить электроэнергию. Регулировщики частоты заметно продлевают срок эксплуатации оборудования. При плавном пуске двигателя, его износ становится намного меньше.
Частотно регулируемый привод поддается удаленной диагностике по промышленной сети. Это позволяет вести учет отработанных моточасов, распознавать выпадающие фазы во входных и выходных цепях, а также выявлять другие дефекты и неисправности.
К регулировочному устройству могут подключаться различные датчики, которые дают возможность настройки каких-либо величин, например, давления. Если сетевое напряжение неожиданно пропало, включается система управляемого торможения и автоматического перезапуска. Скорость вращения стабилизируется при изменяющейся нагрузке. Частотно регулируемый привод становится альтернативной заменой автоматического выключателя.
Скорость вращения стабилизируется при изменяющейся нагрузке. Частотно регулируемый привод становится альтернативной заменой автоматического выключателя.
В качестве основного недостатка следует отметить создание помех большинством моделей таких устройств. Для обеспечения нормальной работы необходимо устанавливать фильтры высокочастотных помех. Кроме того, повышенная мощность частотно регулируемых приводов значительно поднимает их стоимость, поэтому минимальный срок окупаемости составляет 1-2 года.
Применение регулировочных устройств
Частотно регулировочные устройства применяются во многих сферах — в промышленности и в быту. Ими оборудуются прокатные станы, конвейеры, резательные автоматы, вентиляторы, компрессоры, мешалки, бытовые стиральные машины и кондиционеры. Приводы хорошо зарекомендовали себя в городском троллейбусном транспорте. Использование частотно регулируемых приводов в станках с числовым программным управлением позволяет синхронизировать движения сразу в направлении многих осей.
Максимальный экономический эффект эти системы дают при их использовании в различном насосном оборудовании. Стандартное любых типов заключается в регулировке дросселей, устанавливаемых в напорных линиях и определении числа действующих агрегатов. За счет этого удается получить определенные технические параметры, такие как давление в трубопроводе и другие.
Насосы имеют постоянную частоту вращения и не учитывают изменяющийся расход в результате переменного водопотребления. Даже в случае минимального расхода насосы будут поддерживать постоянную частоту вращения, приводя к созданию избыточного давления в сети и вызывая аварийные ситуации. Все это сопровождается значительным бесполезным расходом электроэнергии. В основном это происходит в ночное время при резком падении водопотребления.
С появлением частотно регулируемого привода появилась возможность поддержки постоянного давления непосредственно у потребителей. Данные системы хорошо зарекомендовали себя в совокупности с асинхронными двигателями общего назначения. Регулировка частоты позволяет изменять скорость вращения вала, делая ее более высокой или низкой по сравнению с номинальной. Датчик давления, установленный у потребителя, передает информацию на частотно регулируемый привод, который, в свою очередь, изменяет частоту, поступающую к двигателю.
Регулировка частоты позволяет изменять скорость вращения вала, делая ее более высокой или низкой по сравнению с номинальной. Датчик давления, установленный у потребителя, передает информацию на частотно регулируемый привод, который, в свою очередь, изменяет частоту, поступающую к двигателю.
Современные регулирующие устройства отличаются компактными размерами. Они размещаются в корпусе, защищенном от пыли и влаги. Благодаря удобному интерфейсу, приборы могут эксплуатироваться даже в наиболее сложных условиях, при широком диапазоне мощности — от 0,18 до 630 киловатт и напряжении 220/380 вольт.
Регулируемый электропривод предназначен для управления двигателем путем контроля параметров. Скорость прямо пропорциональна частоте. Поэтому, варьируя частотой, можно поддерживать скорость вращения вала мотора, заданную согласно технологии. Пошаговое описание рабочего процесса для частотно-регулируемого привода (ЧРП) выглядит примерно так.
- Шаг первый. Преобразование диодным силовым выпрямителем одно- или трехфазного входного тока в постоянный.
- Шаг второй. Контроль преобразователем частоты за крутящим моментом и скоростью вращения вала электродвигателя.
- Шаг третий. Управление выходным напряжением, поддерживание постоянного соотношения U/f.

Устройство, выполняющее на выходе системы обратную функцию генерации постоянного тока в переменный, именуется инвертором. Избавление от пульсаций на шине достигается путем добавления дросселя и конденсатора фильтра.
Как выбрать частотно-регулируемый электропривод
Преобладающее число частотных преобразователей изготавливаются со встроенным фильтром электромагнитной совместимости (ЭМС).
Различаются такие виды управления, как , бездатчиковое и датчиковое векторное, и др. Согласно заданным приоритетам в принятии управленческих решений, приводы выбираются по:
- типу нагрузки;
- напряжению и номиналу двигателя;
- режиму управления;
- регулировки;
- ЭМС и т. д.
Если ЧРП предназначен для асинхронного двигателя с большим сроком эксплуатации, то рекомендуется выбирать частотный преобразователь с завышенным током на выходе. С помощью современных преобразователей частоты возможно управление с пульта, по интерфейсу или комбинированным методом.
С помощью современных преобразователей частоты возможно управление с пульта, по интерфейсу или комбинированным методом.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
Идеальное решение для всех видов нагрузки, и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальные преимущества предоставляют возможность:
- регулировать процесс с высокой точностью;
- удалённо диагностировать привод;
- учитывать моточасы;
- следить за неисправностью и старением механизмов;
- повышать ресурс машин;
- значительно снижать акустический шум электродвигателя.
Заключение
Что такое ЧРП? Это мотор-контроллер, который управляет электродвигателем за счет регулировки частоты входной сети, и одновременно защищает агрегат от различных неисправностей (токовой перегрузки, токов КЗ).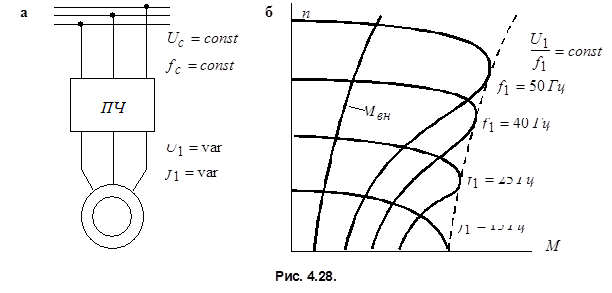
Электрические приводы (выполняющие три функции, связанные со скоростью, управлением и торможением) являются незаменимым устройством для работы электродвигателей и других вращающихся машин. Системы активно применяются во многих сферах производства: в нефтегазовой отрасли, атомной энергетике, деревообработке и др.
Регулирование частотным приводом позволяет с помощью специального преобразователя гибко изменять режимы работы электродвигателя: производить его пуск, остановку, разгон, торможение, изменение скорости вращения.
Изменение частоты напряжения питания приводит к изменению угловой скорости магнитного поля статора. Когда частота уменьшается, двигателя снижается, а скольжение увеличивается.
Принцип действия частотного преобразователя привода
Главным недостатком асинхронных двигателей является сложность регулирования скорости традиционными способами: изменением напряжения питания и введением в цепь обмоток дополнительных сопротивлений. Более совершенным является частотный привод электродвигателя. До недавнего времени преобразователи стоили дорого, но появление IGBT-транзисторов и микропроцессорных управляющих систем позволило зарубежным производителям создать доступные по стоимости устройства. Наиболее совершенными сейчас являются статические
До недавнего времени преобразователи стоили дорого, но появление IGBT-транзисторов и микропроцессорных управляющих систем позволило зарубежным производителям создать доступные по стоимости устройства. Наиболее совершенными сейчас являются статические
Угловая скорость магнитного поля статора ω 0 меняется пропорционально частоте ƒ 1 в соответствии с формулой:
ω 0 = 2π׃ 1 /p,
где p — число пар полюсов.
Способ обеспечивает плавное регулирование скорости. При этом скорость скольжения двигателя не возрастает.
Чтобы получить высокие энергетические показатели двигателя — КПД, коэффициент мощности и перегрузочную способность, вместе с частотой изменяют напряжение питания по определенным зависимостям:
- постоянный момент нагрузки — U 1 / ƒ 1 = const;
- вентиляторный характер момента нагрузки — U 1 / ƒ 1 2 = const;
- момент нагрузки, обратно пропорциональный скорости — U 1 /√ ƒ 1 = const.
Эти функции реализуются с помощью преобразователя, одновременно изменяющего частоту и напряжение на статоре двигателя.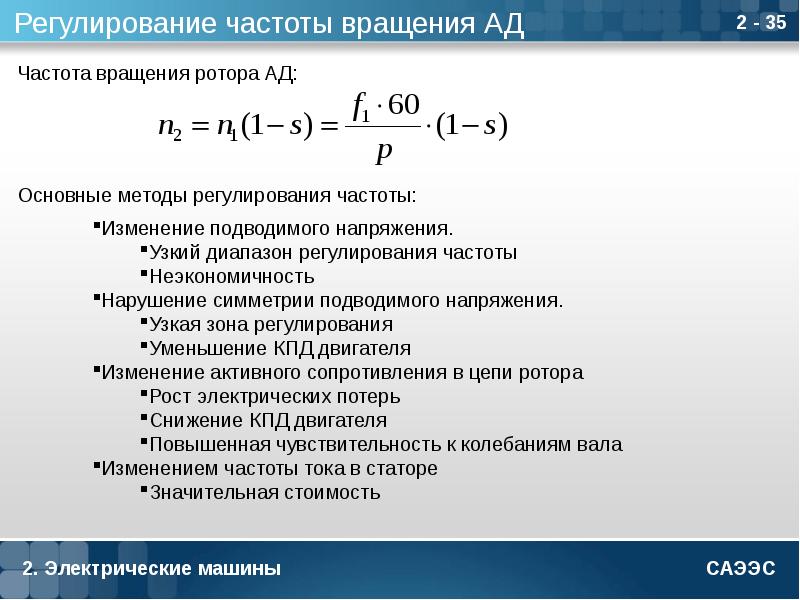 Электроэнергия экономится за счет регулирования с помощью необходимого технологического параметра: давления насоса, производительности вентилятора, скорости подачи станка и др. При этом параметры меняются плавно.
Электроэнергия экономится за счет регулирования с помощью необходимого технологического параметра: давления насоса, производительности вентилятора, скорости подачи станка и др. При этом параметры меняются плавно.
Способы частотного управления асинхронными и синхронными электродвигателями
В частотно регулируемом приводе на базе асинхронных двигателей с короткозамкнутым ротором применяются два способа управления — скалярное и векторное. В первом случае одновременно изменяются амплитуда и частота питающего напряжения.
Это необходимо для поддерживания рабочих характеристик двигателя, чаще всего — постоянное отношение его максимального момента к моменту сопротивления на валу. В результате остаются неизменными КПД и коэффициент мощности во всем диапазоне вращения.
Векторное регулирование заключается в одновременном изменении амплитуды и фазы тока на статоре.
Частотный привод типа работает только при небольших нагрузках, при росте которых выше допустимых значений синхронизм может нарушиться.
Достоинства частотного привода
Частотное регулирование обладает целым спектром преимуществ по сравнению с другими способами.
- Автоматизация работы двигателя и производственных процессов.
- Плавный пуск, устраняющий типичные ошибки, возникающие при разгоне двигателя. Повышение надежности привода частотного и оборудования за счет снижения перегрузок.
- Повышение экономичности работы и производительности привода в целом.
- Создание постоянной частоты вращения электродвигателя независимо от характера нагрузки, что важно при переходных процессах. Использование обратной связи дает возможность поддерживать постоянную скорость двигателя при различных возмущающих воздействиях, в частности при переменных нагрузках.
- Преобразователи легко встраиваются в действующие технические системы без существенной переделки и остановки технологических процессов. Диапазон мощностей велик, но с их увеличением существенно возрастают цены.
- Возможность отказаться от вариаторов, редукторов, дросселей и прочей регулирующей аппаратуры или расширить диапазон их применения. За счет этого обеспечивается значительная экономия электроэнергии.
- Устранение вредного действия переходных процессов на технологическое оборудование, типа гидравлических ударов или повышенного давления жидкости в трубопроводах при снижении ее потребления в ночное время.
 За счет этого обеспечивается значительная экономия электроэнергии.
За счет этого обеспечивается значительная экономия электроэнергии.Недостатки
Как все инверторы, частотники являются источниками помех. В них необходимо устанавливать фильтры.
Стоимость брендов высока. Она значительно возрастает при увеличении мощности аппаратов.
Частотная регулировка при транспортировке жидкостей
На объектах, где производится перекачка воды и других жидкостей, регулировка расхода производится большей частью с помощью задвижек и клапанов. В настоящее время перспективным направлением является применение частотного привода насоса или вентилятора, приводящего в движение их лопасти.
Применение частотного преобразователя как альтернативы дроссельной заслонки дает энергосберегающий эффект до 75 %. Задвижка, сдерживая поток жидкости, не выполняет полезную работу. При этом возрастают потери энергии и вещества на его транспортировку.
При этом возрастают потери энергии и вещества на его транспортировку.
Привод частотный дает возможность поддерживать у потребителя постоянное давление при изменении расхода жидкости. От датчика давления поступает сигнал на привод, который изменяет частоту вращения двигателя и тем самым регулирует его обороты, поддерживая заданный расход.
Управление насосными агрегатами производится путем изменения их производительности. Мощность потребления у насоса находится в кубической зависимости от производительности или скорости вращения колеса. Если обороты уменьшить в 2 раза, производительность насоса упадет в 8 раз. Наличие суточного графика потребления воды позволяет определить экономию электроэнергии за этот период, если производить управление частотным приводом. За счет него можно автоматизировать насосную станцию и оптимизировать тем самым давление воды в сетях.
Работа систем вентиляции и кондиционирования воздуха
Максимальный расход воздуха в вентиляционных системах не всегда нужен.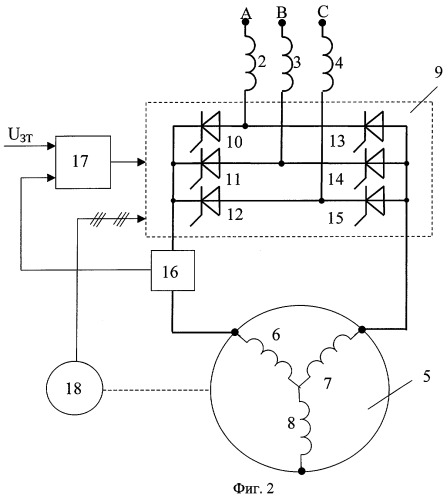 Условия функционирования могут потребовать снижения производительности. Традиционно для этого применяется дросселирование, когда частота вращения колеса остается постоянной. Удобней менять расход воздуха за счет частотно регулируемого привода, когда изменяются сезонные и климатические условия, выделение тепла, влаги, паров и вредных газов.
Условия функционирования могут потребовать снижения производительности. Традиционно для этого применяется дросселирование, когда частота вращения колеса остается постоянной. Удобней менять расход воздуха за счет частотно регулируемого привода, когда изменяются сезонные и климатические условия, выделение тепла, влаги, паров и вредных газов.
Экономия электроэнергии в системах вентиляции и кондиционирования достигается не ниже, чем у насосных станций, поскольку потребляемая мощность вращения вала находится в кубической зависимости от оборотов.
Устройство частотного преобразователя
Современный частотный привод устроен по схеме двойного преобразователя. Он состоит из выпрямителя и импульсного инвертора с системой управления.
После выпрямления напряжения сети сигнал сглаживается фильтром и поступает на инвертор с шестью транзисторными ключами, где каждый из них подключен к обмоткам статора асинхронного электродвигателя. Блок преобразует выпрямленный сигнал в трехфазный нужной частоты и амплитуды. Силовые IGBT-транзисторы на выходных каскадах обладают высокой частотой переключения и обеспечивают четкий прямоугольный сигнал без искажений. За счет фильтрующих свойств обмоток двигателя форма кривой тока на их выходе остается синусоидальной.
Силовые IGBT-транзисторы на выходных каскадах обладают высокой частотой переключения и обеспечивают четкий прямоугольный сигнал без искажений. За счет фильтрующих свойств обмоток двигателя форма кривой тока на их выходе остается синусоидальной.
Способы регулирования амплитуды сигнала
Величина выходного напряжения регулируется двумя методами:
- Амплитудный — изменение величины напряжения.
- Широтно-импульсная модуляция — способ преобразования импульсного сигнала, при котором изменяется его длительность, а частота остается неизменной. Здесь мощность зависит от ширины импульса.
Второй способ применяется чаще всего в связи с развитием техники микропроцессоров. Современные инверторы изготавливаются на основе запираемых GTO-тиристоров или IGBT-транзисторов.
Возможности и применение преобразователей
Частотный привод обладает многими возможностями.
- Регулирование частоты трехфазного питающего напряжения от нуля до 400 Гц.
- Разгон или торможение электродвигателя от 0,01 сек. до 50 мин. по заданному закону от времени (обычно — линейному). При разгоне возможно не только снижение, но и увеличение до 150 % динамических и пусковых моментов.
- Реверс двигателя с заданными режимами торможения и разгона до нужной скорости в другом направлении.
- В преобразователях применяется настраиваемая электронная защита от коротких замыканий, перегрузок, утечек на землю и обрывов линий питания двигателя.
- На цифровых дисплеях преобразователей изображаются данные об их параметрах: частоте, напряжении питания, скорости, токе и др.
- В преобразователях настраиваются вольт-частотные характеристики в зависимости от того, какие требуются нагрузки на двигатели. Функции систем управления на их основе обеспечиваются за счет встроенных контроллеров.
- Для низких частот важно применять векторное управление, позволяющее работать с полным моментом двигателя, поддерживать постоянную скорость при изменении нагрузок, контролировать момент на валу. Частотно регулирующий привод хорошо работает при правильном введении паспортных данных двигателя и после успешного проведения его тестирования. Известны изделия компаний HYUNDAI, Sanyu и др.
 до 50 мин. по заданному закону от времени (обычно — линейному). При разгоне возможно не только снижение, но и увеличение до 150 % динамических и пусковых моментов.
до 50 мин. по заданному закону от времени (обычно — линейному). При разгоне возможно не только снижение, но и увеличение до 150 % динамических и пусковых моментов. Известны изделия компаний HYUNDAI, Sanyu и др.
Известны изделия компаний HYUNDAI, Sanyu и др.Области применения преобразователей следующие:
- насосы в системах горячего и холодного водо- и теплоснабжения;
- шламовые, песковые и пульповые насосы обогатительных фабрик;
- системы транспортирования: конвейеры, рольганги и др. средства;
- мешалки, мельницы, дробилки, экструдеры, дозаторы, питатели;
- центрифуги;
- лифты;
- металлургическое оборудование;
- буровое оборудование;
- электроприводы станков;
- экскаваторное и крановое оборудование, механизмы манипуляторов.
Производители преобразователей частоты, отзывы
Отечественный производитель уже начал изготавливать изделия, подходящие для пользователей по качеству и цене. Преимуществом является возможность быстро получить нужный аппарат, а также подробную консультацию по настройке.
Компания «Эффективные системы» производит серийную продукцию и опытные партии оборудования. Изделия применяются для бытового использования, в малом бизнесе и в промышленности.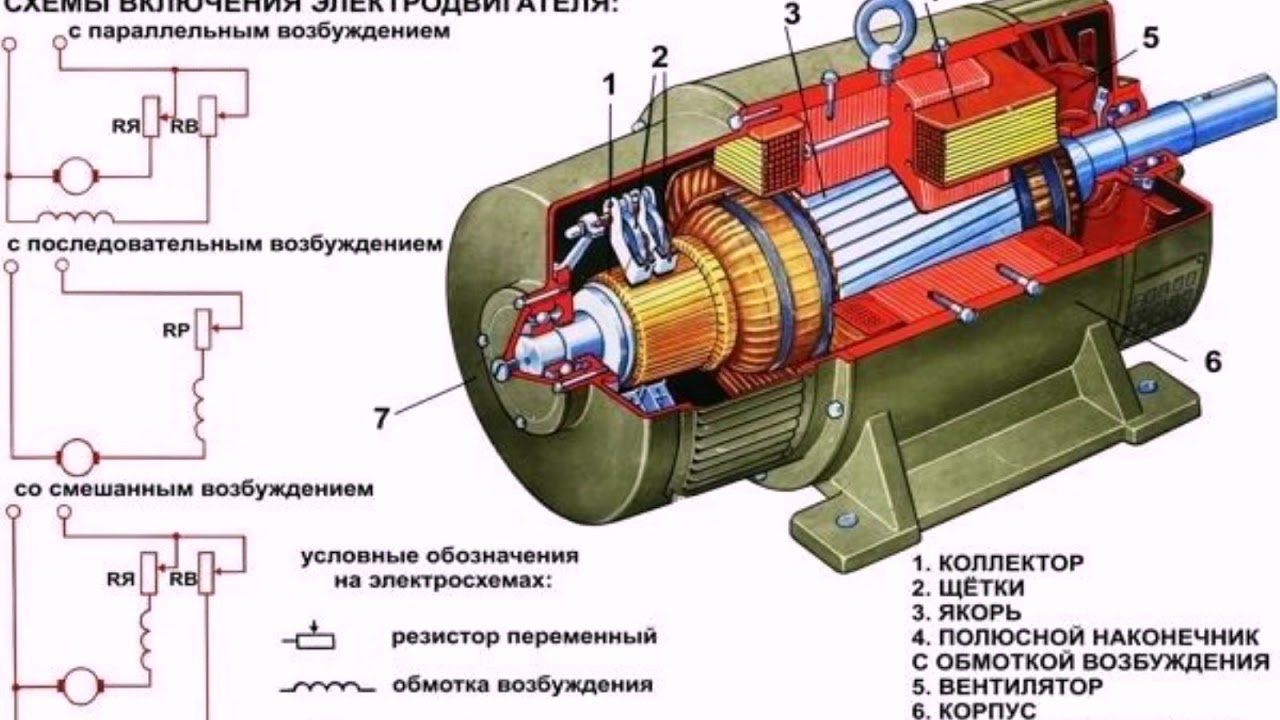 Производитель «Веспер» выпускает семь серий преобразователей, среди которых есть многофункциональные, подходящие для большинства промышленных механизмов.
Производитель «Веспер» выпускает семь серий преобразователей, среди которых есть многофункциональные, подходящие для большинства промышленных механизмов.
Лидером по производству частотников является датская компания Danfoss. Ее изделия используются в системах вентиляции, кондционирования, водоснабжения и отопления. Финская компания Vacon, входящая в состав датской, производит модульные конструкции, из которых можно скомпоновать необходимые устройства без лишних деталей, что позволяет сэкономить на компонентах. Известны также преобразователи международного концерна ABB, применяемые в промышленности и в быту.
Если судить по отзывам, для решения простых типовых задач можно применять дешевые отечественные преобразователи, а для сложных нужен бренд, где значительно больше настроек.
Заключение
Привод частотный управляет электродвигателем путем изменения частоты и амплитуды питающего напряжения, при этом защищая его от неисправностей: перегрузок, короткого замыкания, обрывов в питающей сети. Подобные выполняют три основные функции, связанные с разгоном, торможением и скоростью двигателей. Это позволяет повысить эффективность оборудования во многих областях техники.
Подобные выполняют три основные функции, связанные с разгоном, торможением и скоростью двигателей. Это позволяет повысить эффективность оборудования во многих областях техники.
Описание:
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор.Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели
превосходят двигатели постоянного тока по многим параметрам: они просты по
устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по
сравнению с двигателями постоянного тока размеры, массу и стоимость при той же
мощности. Асинхронные двигатели просты в изготовлении и
эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты
вращения исполнительных механизмов можно осуществлять при помощи различных
устройств: механических вариаторов, гидравлических
муфт, дополнительно вводимыми в статор или ротор резисторами,
электромеханическими преобразователями частоты, статическими преобразователями
частоты.
Применение первых
четырех устройств не обеспечивает высокого качества регулирования
скорости, неэкономично, требует больших затрат при монтаже и
эксплуатации.
Статические
преобразователи частоты являются наиболее совершенными устройствами управления
асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.
Для получения высоких
энергетических показателей асинхронного двигателя – коэффициентов мощности,
полезного действия, перегрузочной способности – необходимо одновременно с
частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте :
Для вентиляторного характера момента нагрузки это состояние имеет вид:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого
электропривода обеспечивает энергосбережение и позволяет получать новые качества
систем и объектов. Значительная экономия электроэнергии обеспечивается за счет
регулирования какого-либо технологического параметра. Если это транспортер или
конвейер, то можно регулировать скорость его движения.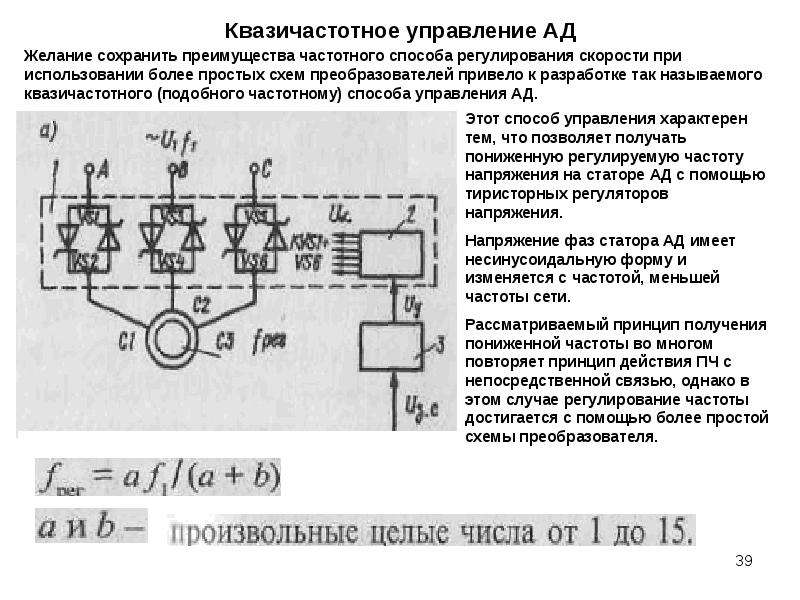 Если это насос или
вентилятор – можно поддерживать давление или регулировать производительность.
Если это станок, то можно плавно регулировать скорость подачи или главного
движения.
Если это насос или
вентилятор – можно поддерживать давление или регулировать производительность.
Если это станок, то можно плавно регулировать скорость подачи или главного
движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность
частотного регулирования наглядно видна из
рисунка 1
Таким образом, при
дросселировании поток вещества, сдерживаемый задвижкой или клапаном,
не совершает полезной работы. Применение регулируемого электропривода насоса или
вентилятора позволяет задать необходимое давление или расход, что обеспечит не
только экономию электроэнергии, но и снизит потери транспортируемого
вещества.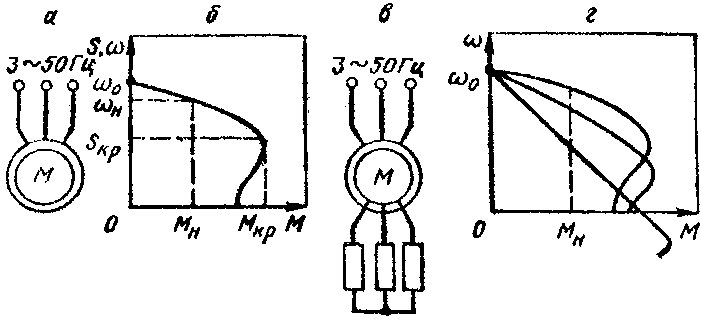
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах
инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению
с тиристорами они имеют более высокую частоту переключения, что позволяет
вырабатывать выходной сигнал синусоидальной формы с минимальными
искажениями.
Принцип работы преобразователя частоты
Преобразователь частоты
состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора, системы управления ШИМ, системы автоматического регулирования, дросселя
Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых.
и напряжения Uвых осуществляется в инверторе за счет высокочастотного
широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики.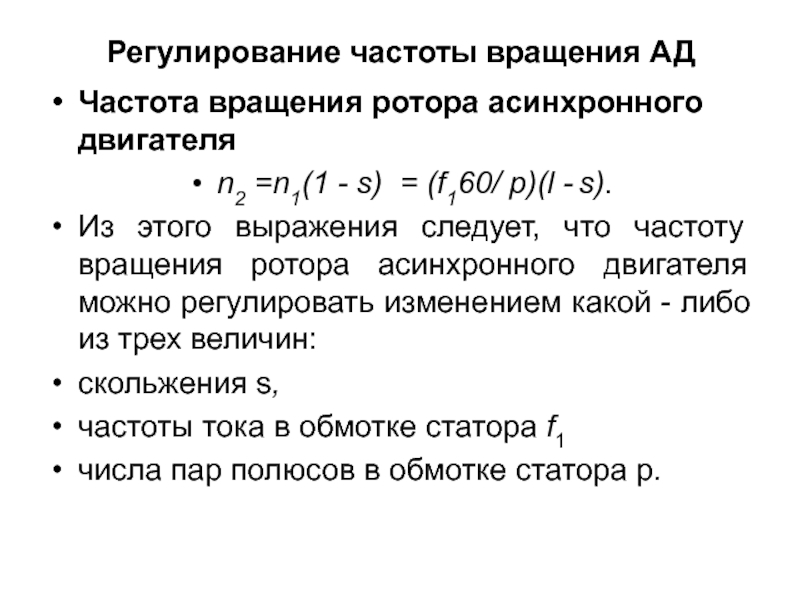 Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Структура частотного преобразователя
Большинство современных преобразователей частоты
построено по схеме двойного преобразования. Входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в звене постоянного тока B, сглаживается фильтром состоящим из дросселя Lв и конденсатора фильтра Cв, а затем вновь преобразуется инвертором АИН в переменное напряжение изменяемой частоты и амплитуды. Регулирование выходной частоты fвых . и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления. Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления СУИ обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряженияопределяются параметрами модулирующей синусоидальной функции. Таким образом, на выходе преобразователя частоты формируется трехфазное переменное напряжение изменяемой частоты и амплитуды.
Мы всегда рады видеть у себя наших старых партнеров и ждем новых.
Доставка во все регионы России!
Частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем в настоящее время широко применяется, так как позволяет в широком интервале плавно изменять обороты вращения ротора как выше, так и ниже номинальных значении.
Частотные преобразователи являются современными, высокотехнологичными устройствами, обладающими большим диапазоном регулирования, имеющими обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.
Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.
Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В изменение частоты питающего тока достигается за счет применения не имеющих движения электрических элементов.
Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе — три фазы с тем же значением напряжения, что позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.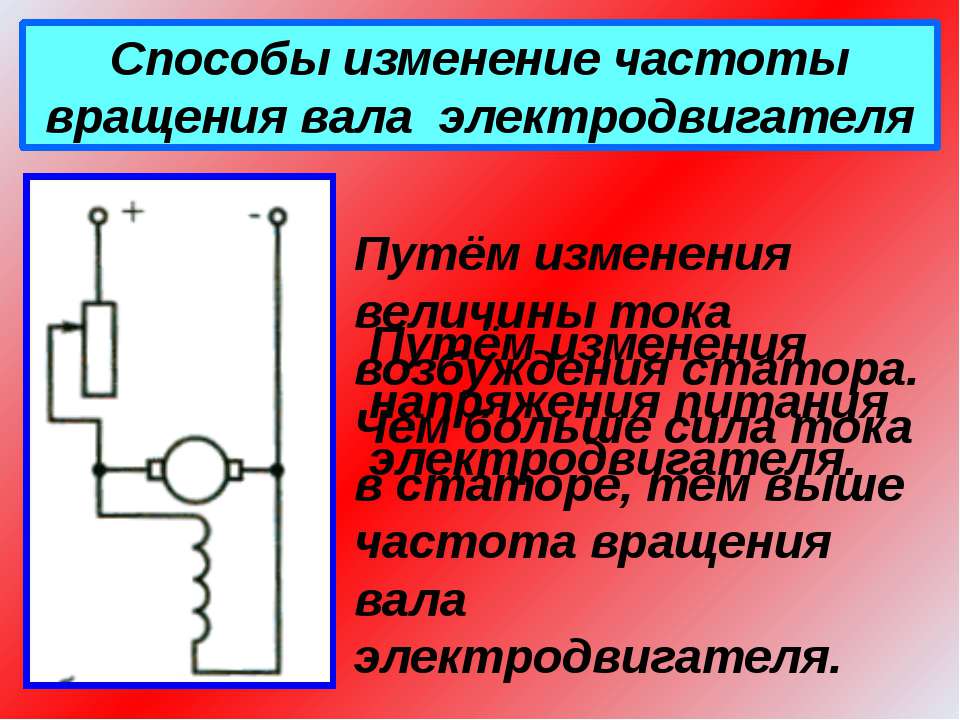
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах.
Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
для насосного и вентиляторного привода;
для общепромышленного электропривода;
эксплуатируется в составе электродвигателей, работающих с перегрузкой.
Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Поддерживать функции автоматического восстановления режима работы при кратковременном прерывании питания. Выполнять управление переходными процессами с удаленного пульта и осуществлять защиту электродвигателей от перегрузок.
Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения
ω о = 2πf 1 /p
При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения зависли от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f 2 1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/√ f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.
Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне — 20…30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах.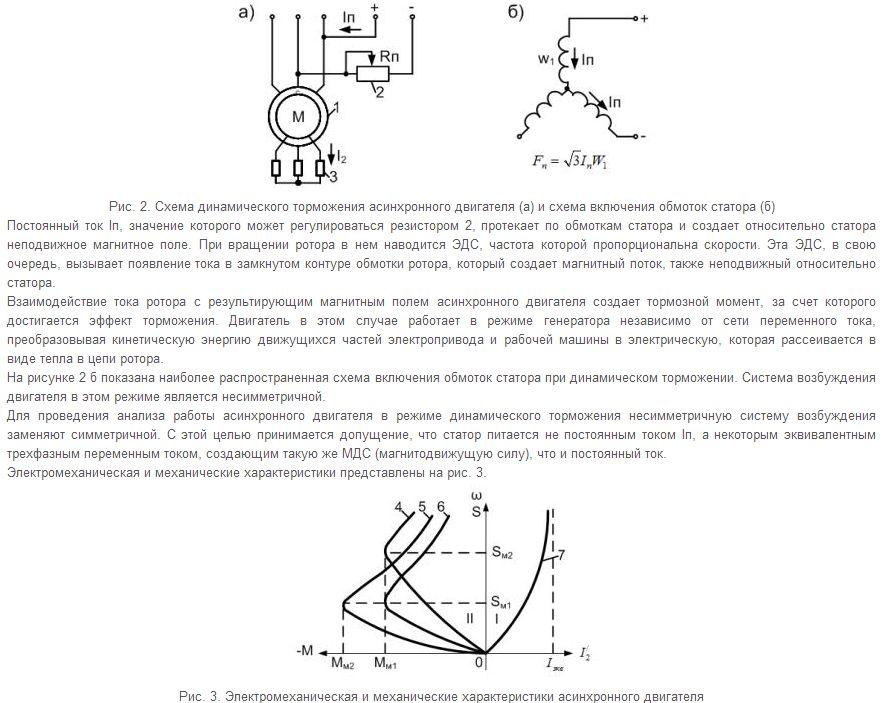 Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
При увеличении оборотов вращения двигателя выше указанного значения в ею паспорте частота источника питания не должна превышать номинальную не более чем 1,5 — 2 раза.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности мри гаком регулировании невелики, поскольку не сопровождаются увеличением . Получаемые при этом механические характеристики обладают высокой жесткостью.
Управление скоростью трехфазного асинхронного двигателя
Как контролировать скорость трехфазного асинхронного двигателя? Метод регулирования скорости включает в себя: изменение числа полюсов, регулирование напряжения статора, преобразование частоты статора, каскадное регулирование скорости, регулировку скорости двойной подачи, гидравлическую муфту, электромагнитную фрикционную муфту и т. д.
д.
Дана фактическая скорость трехфазного асинхронного двигателя. по n=n с (1 — с) = 120f /p (1-с). Из формулы видно, что скорость трехфазного асинхронного двигателя можно изменить путем изменения числа полюсов асинхронного двигателя «p», скольжения «s» и частоты питания «f».
Управление скоростью с переключением полюсов
Как показано в формуле n s =120f/p, оно может изменять синхронную скорость двигателя путем изменения количества полюсов обмотки статора, тем самым изменяя рабочую скорость. Управление скоростью с переключением полюсов в основном используется в асинхронных двигателях с короткозамкнутым ротором. Регулятор скорости с переключением полюсов имеет следующие характеристики:
- Более прочные механические характеристики и хорошая стабильность
- Отсутствие потерь на скольжение и высокая эффективность
- Простое подключение, удобное управление и низкая цена
Но плавное регулирование скорости этим методом невозможно из-за большого перепада уклонов. Следовательно, его можно использовать с регулированием скорости по напряжению и электромагнитной фрикционной муфтой для получения более эффективной характеристики плавного регулирования скорости.
Следовательно, его можно использовать с регулированием скорости по напряжению и электромагнитной фрикционной муфтой для получения более эффективной характеристики плавного регулирования скорости.
Этот метод подходит для производственного оборудования без плавного регулирования скорости, такого как металлорежущие станки, подъемники, краны, вентиляторы, водяные насосы и т.д.
Регулятор скорости скольжения
1. Изменение напряжения статора
Крутящий момент асинхронного двигателя пропорционален квадрату напряжения статора.То есть изменение напряжения статора может изменить механическую характеристику и крутящий момент двигателя.
Этот метод не подходит для обычного двигателя с короткозамкнутым ротором, так как сопротивление его ротора очень мало и ток будет быстро возрастать на низкой скорости.
Но его можно использовать для асинхронного двигателя с обмоткой за счет последовательного сопротивления или частого варистора в цепи ротора, чтобы уменьшить нагрев двигателя.
2. Изменение сопротивления ротора
Этот метод регулирования скорости применим только к мотору с обмоткой.В цепи ротора асинхронного двигателя последовательно с сопротивлением при фиксированной нагрузке чем больше сопротивление, тем ниже скорость двигателя. Чем меньше сопротивление, тем выше скорость.
Этот метод прост, легок в управлении и требует небольших первоначальных инвестиций. Но мощность скольжения расходуется на сопротивление при нагреве. Он также имеет мягкие механические характеристики.
3. Каскадное управление скоростью
В настоящее время каскадное управление скоростью использует схему каскадного управления инвертором SCR и имеет следующие преимущества: усиление механических характеристик, низкое падение напряжения на выпрямителе, небольшое пространство, отсутствие вращающихся частей, низкий уровень шума, простота. поддержание.Это один из методов управления скоростью двигателя с обмоткой.
У него есть и свой недостаток. То есть схема ротора оснащена дросселем для фильтра, поэтому коэффициент мощности низкий.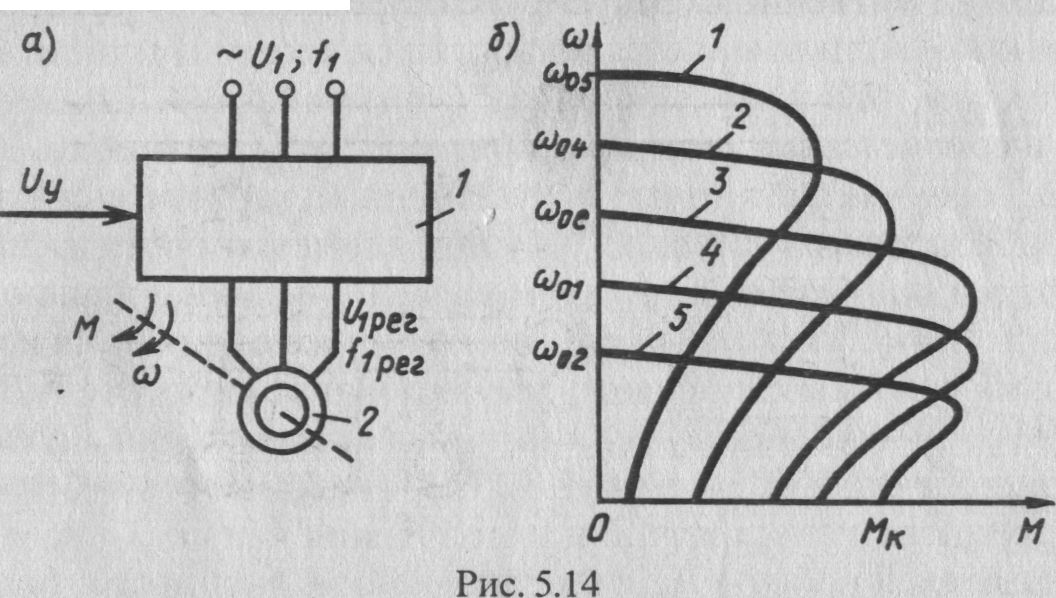
Регулирование скорости с переменной частотой
Согласно формуле скорости асинхронного двигателя видно, что когда скольжение s остается постоянным, скорость двигателя n в основном пропорциональна частоте сети f . Следовательно, изменение частоты f позволяет плавно регулировать скорость асинхронного двигателя.Изменение частоты питания является экономичным методом регулирования скорости, а также одним из самых популярных способов регулирования скорости асинхронного двигателя.
Регулирование скорости с переменной частотой — это способ изменить частоту сети статора двигателя, а затем изменить его синхронную скорость. Основным оборудованием системы частотно-регулируемого управления является преобразователь частоты или частотно-регулируемый привод (ЧРП), обеспечивающий преобразование частоты для источника питания. Преобразователи частоты можно разделить на две категории: ЧРП AC-DC-AC и ЧРП AC-AC.
В настоящее время широко используемые частотно-регулируемые приводы используют цифровые технологии и стремятся к миниатюризации, высокой надежности и высокой точности. В приложениях он не только обладает значительной энергосберегающей производительностью, но и имеет следующую производительность:
В приложениях он не только обладает значительной энергосберегающей производительностью, но и имеет следующую производительность:
- Высокоточная плавная регулировка скорости.
- Полная функция защиты, способная отображать неисправность путем самодиагностики и простого обслуживания.
- Пуск непосредственно от сети, с большим пусковым моментом и малым пусковым током, которые снижают воздействие на электросеть и оборудование, а также имеют функцию подъемного крутящего момента, тем самым сохраняя устройство плавного пуска.
- Высокий коэффициент мощности и сохранение устройства компенсации конденсатора.
Регулятор скорости асинхронного двигателя
Скорость трехфазного асинхронного двигателя определяется выражением
N = N с (1 – с)
и N с = 120f/P
Это показывает, что скорость трехфазного асинхронного двигателя зависит от синхронная скорость (N s ) и скольжение(я). Синхронная скорость асинхронного двигателя зависит от частоты питания и количества полюсов статора.
Синхронная скорость асинхронного двигателя зависит от частоты питания и количества полюсов статора.
Таким образом, изменяя частоту питания, количество полюсов статора и скольжение, мы можем изменить скорость трехфазного асинхронного двигателя. Следовательно, управление скоростью трехфазного асинхронного двигателя может быть достигнуто следующими способами:
Синхронную скорость можно изменить, изменив частоту питания статора (f). Но только изменение частоты питания при постоянном напряжении питания отрицательно влияет на поток в воздушном зазоре. Поскольку поток в воздушном зазоре пропорционален соотношению напряжения питания и частоты питания.
Следовательно, соотношение напряжения питания и частоты питания поддерживается постоянным за счет одновременного изменения напряжения и частоты статора. Это необходимо для поддержания постоянного потока в воздушном зазоре. Таким образом, этот метод также известен как постоянный (V/f) контроль.
В этом трехфазном методе управления скоростью двигателя вход переменного тока постоянного напряжения и постоянной частоты подается на выпрямитель, который преобразует переменный ток в постоянный. Выход выпрямителя фильтруется батареей конденсаторов и подается на схему инвертора.Инвертор преобразует постоянное напряжение в трехфазное переменное напряжение и переменную частоту.
Это питание подается на обмотку статора двигателя. Таким образом, мы получаем постоянное управление скоростью V/f асинхронного двигателя.
В этом методе поток в воздушном зазоре остается постоянным. Таким образом, можно получить плавное регулирование скорости. Таким методом можно получить максимальный крутящий момент на всех скоростях.
Из-за больших капитальных вложений эта система оправдана только для приводов, для которых важны прочные, необслуживаемые характеристики асинхронного двигателя.В противном случае двигатель постоянного тока с преобразователем частоты является логичной и дешевой альтернативой.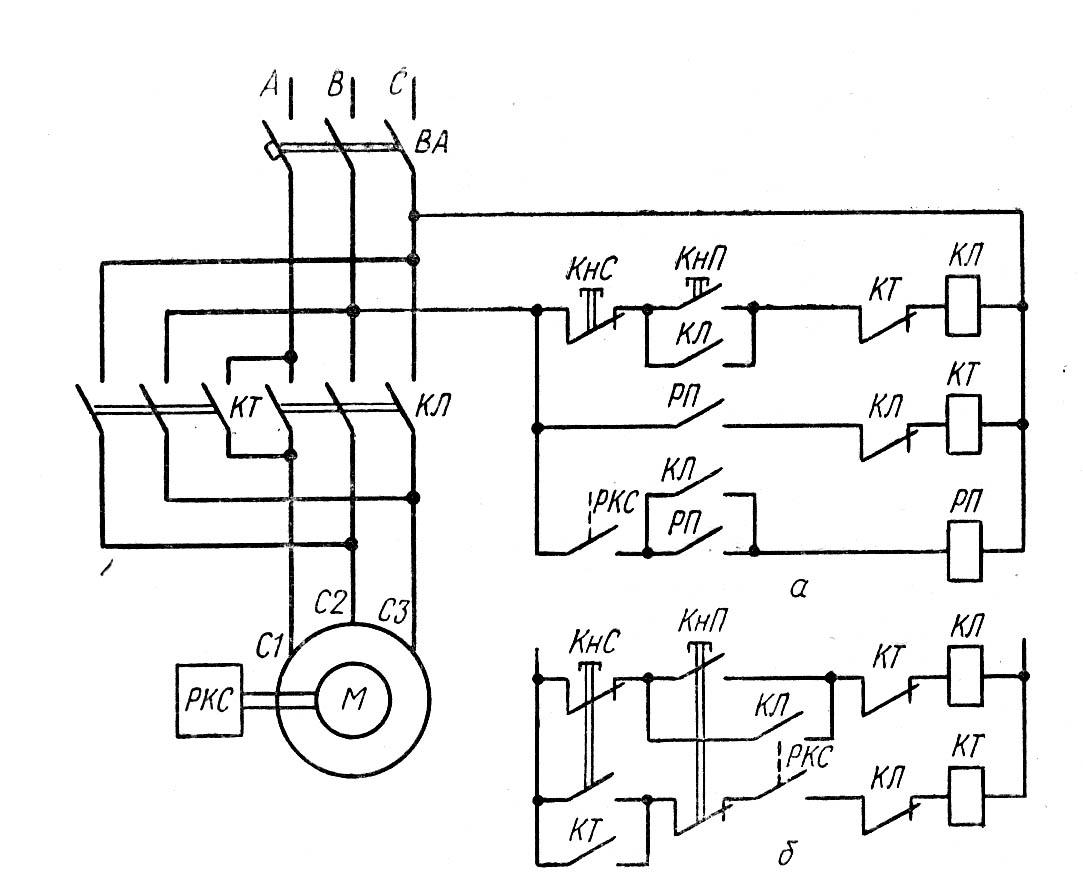
Управление скоростью асинхронного двигателя напряжением статора
В этом методе управления скоростью асинхронного двигателя для изменения скорости двигателя изменяется только напряжение статора, частота статора поддерживается постоянной. Мы можем изменять скорость двигателя, изменяя напряжение статора. С увеличением напряжения статора скорость двигателя будет увеличиваться.
В этом методе управления скоростью асинхронного двигателя , когда напряжение статора уменьшается, поток воздушного зазора и крутящий момент двигателя уменьшаются.Управление скоростью достигается за счет снижения крутящего момента двигателя.
В этом методе создается очень низкий пусковой момент. Следовательно, этот тип управления не подходит для нагрузок с постоянным крутящим моментом. Этот тип управления предпочтителен в таких приложениях, как вентиляторы, центробежные насосы и воздуходувки, где требуется низкий пусковой момент.
Этот метод применим только для небольших двигателей и нагрузок вентиляторного типа, когда крутящий момент нагрузки увеличивается с увеличением скорости. Двигатель имеет тенденцию перегреваться при других нагрузках.Это широко используемый метод для потолочных вентиляторов, приводимых в действие однофазными асинхронными двигателями, которые имеют большое сопротивление покоя, ограничивающее ток, потребляемый двигателем.
Двигатель имеет тенденцию перегреваться при других нагрузках.Это широко используемый метод для потолочных вентиляторов, приводимых в действие однофазными асинхронными двигателями, которые имеют большое сопротивление покоя, ограничивающее ток, потребляемый двигателем.
Регулирование скорости асинхронного двигателя с помощью полюсов статора
С помощью подходящего переключателя соединение статора можно изменить таким образом, чтобы изменить число полюсов статора. Это изменяет фактическую скорость двигателя, поскольку фактическая скорость двигателя примерно обратно пропорциональна количеству полюсов.
При подходящих соединениях одна обмотка может давать две разные скорости. Если требуется более двух скоростей, в один и тот же паз помещаются две отдельные обмотки. Теперь каждая обмотка может дать две скорости, а две обмотки могут дать четыре разные скорости. В пружинном двигателе необходимо соответствующим образом изменить полюса ротора. Поэтому трудно применить этот метод к двигателю с контактными кольцами.
Управление скоростью асинхронного двигателя сопротивлением ротора
Как следует из названия, этот метод управления скоростью трехфазного двигателя применим только к асинхронному двигателю с контактными кольцами.
Как известно, при подсинхронной скорости (скорости ниже синхронной) управление индукционным токосъемным кольцом возможно путем введения переменного сопротивления в цепь ротора двигателя. Этот метод основан на общем принципе, согласно которому скольжение асинхронного двигателя увеличивается (т. е. скорость уменьшается) по мере увеличения потерь мощности в цепи ротора.
Этот метод обеспечивает широкий диапазон скоростей и хороший пусковой момент. Максимальный крутящий момент при этом остается постоянным. Хорошая регулировка скорости может быть достигнута как для нагрузок с постоянным крутящим моментом, так и для нагрузок вентиляторного типа.
Традиционный метод управления сопротивлением ротора требует одновременного и точного изменения всех трех уравновешенных резисторов в каждой фазе.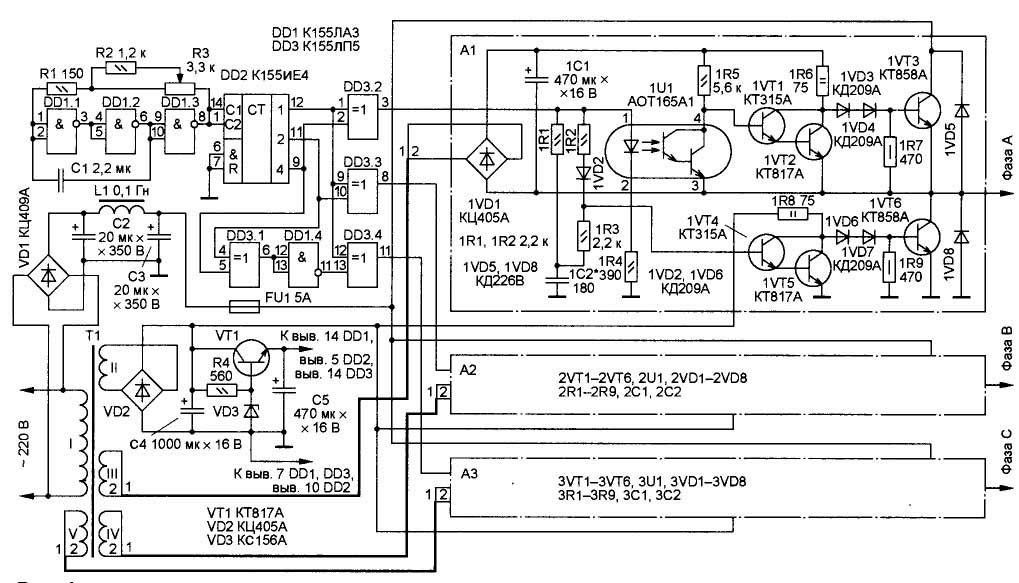 Часто этого трудно добиться.
Часто этого трудно добиться.
Чтобы решить эту проблему, используется высокочастотный тиристорный прерыватель, который позволяет изменять внешнее сопротивление одновременно и беспрерывно.
На рисунке показана схема, в которой мощность скольжения ротора выпрямляется в трехфазном мостовом выпрямителе и подается через фильтрующий дроссель на внешнее сопротивление.
Тиристор (показан значком переключателя на рисунке) в прерывателе, подключенном через резистор, включается и выключается с высокой частотой. Отношение времени включения к времени выключения определяет действующее значение сопротивления цепи ротора и, таким образом, управляет скоростью двигателя, изменяя его скоростно-моментную характеристику.
Самым большим недостатком этого метода является его низкая эффективность из-за потери мощности на внешнем сопротивлении ротора. Поэтому этот метод применяется для узкого диапазона скоростей и, как правило, на короткое время.
Вместо того, чтобы тратить энергию скольжения на внешнее сопротивление ротора, можно использовать обратную связь для повышения эффективности этой схемы управления скоростью.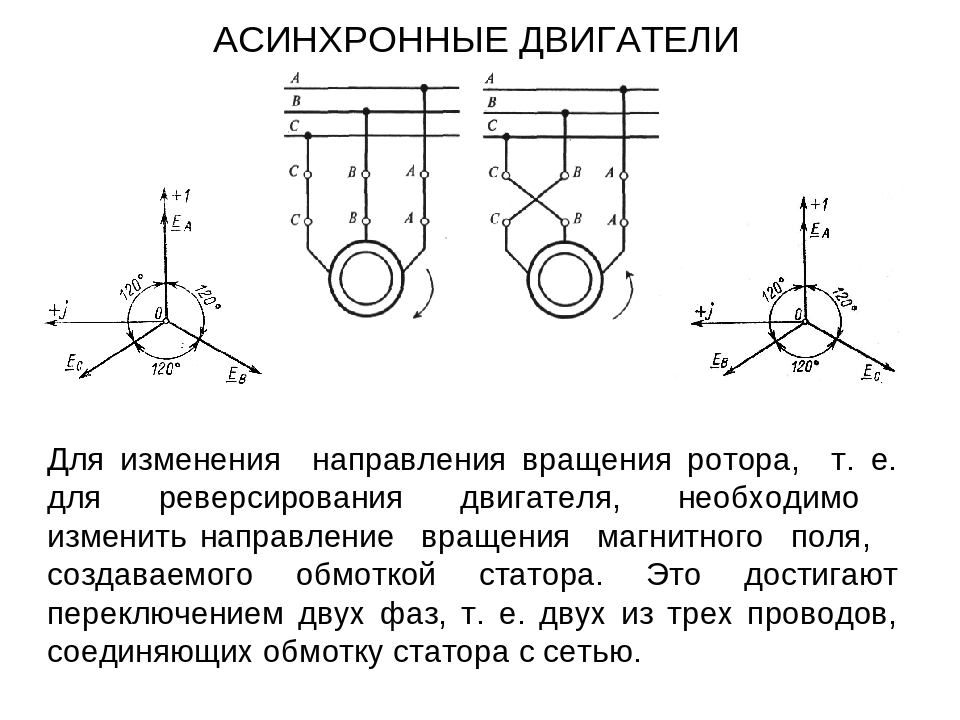 Это достигается использованием преобразователя и инвертора в цепи ротора, как показано на рисунке.
Это достигается использованием преобразователя и инвертора в цепи ротора, как показано на рисунке.
При подаче электроэнергии в цепь ротора (отрицательные потери мощности ротора) становится возможной работа на сверхсинхронной скорости (т. е. на скорости выше синхронной).
Регулирование скорости асинхронного двигателя каскадным методом
В этом методе две машины механически соединяются.В основном оба двигателя относятся к типу токосъемников. В этом случае питание подключается к статору одного из асинхронных двигателей, а ЭДС индукции ротора подается к статору другого двигателя.
Если P 1 и P 2 — количество полюсов двух машин, а f — частота сети, то набор может давать следующие разные скорости:
Спасибо, что прочитали о «регулировании скорости асинхронного двигателя».
Трехфазный асинхронный двигатель | Все сообщения
© https://yourelectricalguide. com/ регулирование скорости асинхронного двигателя.
com/ регулирование скорости асинхронного двигателя.
Регулятор скорости двигателя переменного тока — Inst Tools
Асинхронные двигатели переменного токаоснованы на принципе вращающегося магнитного поля, создаваемого набором стационарных обмоток (называемых обмотками статора), на которые подается питание переменного тока разных фаз.
Эффект мало чем отличается от серии мигающих лампочек-«преследователей», которые, кажется, «двигаются» в одном направлении из-за последовательности мигания. Если наборы проволочных катушек (обмоток) запитываются одинаковым образом — каждая катушка достигает максимальной напряженности поля в разное время, чем ее соседняя соседняя — эффектом будет магнитное поле, которое «кажется» движущимся в одном направлении.
Если эти обмотки ориентированы по окружности круга, движущееся магнитное поле вращается вокруг центра круга, как показано на этой последовательности изображений (читайте слева направо, сверху вниз, как если бы вы были чтение слов в предложении):
Любой намагниченный объект, помещенный в центр этого круга, будет пытаться вращаться с той же скоростью вращения, что и вращающееся магнитное поле.
используют этот принцип, в котором намагниченный ротор точно следует скорости магнитного поля.
Любой электропроводящий объект, помещенный в центр круга, будет подвергаться индукции при изменении направления магнитного поля вокруг проводника.
Это индуцирует электрические токи внутри проводящего объекта, которые, в свою очередь, будут реагировать на вращающееся магнитное поле таким образом, что объект будет «волочиться» полем, всегда немного отставая в скорости.
Этот принцип используется в асинхронных двигателях переменного тока, когда ненамагниченный (но электропроводящий) ротор вращается со скоростью, немного меньшей (Примечание), чем синхронная скорость вращающегося магнитного поля.
Примечание: Разница между синхронной скоростью и фактической скоростью ротора называется скоростью скольжения двигателя.
Скорость вращения этого магнитного поля прямо пропорциональна частоте переменного тока и обратно пропорциональна количеству полюсов в статоре:
Где,
S = синхронная скорость вращающегося магнитного поля, оборотов в минуту (об/мин)
f = частота, циклов в секунду (Гц)
n = общее количество полюсов статора на фазу (самая простая конструкция асинхронного двигателя переменного тока будет иметь два полюса)
Связь между синхронной скоростью, частотой и числом полюсов можно понять по аналогии: скорость, с которой кажутся движущимися огни в массиве «преследователя», является функцией частоты мигания и количества лампочек на единицу длины.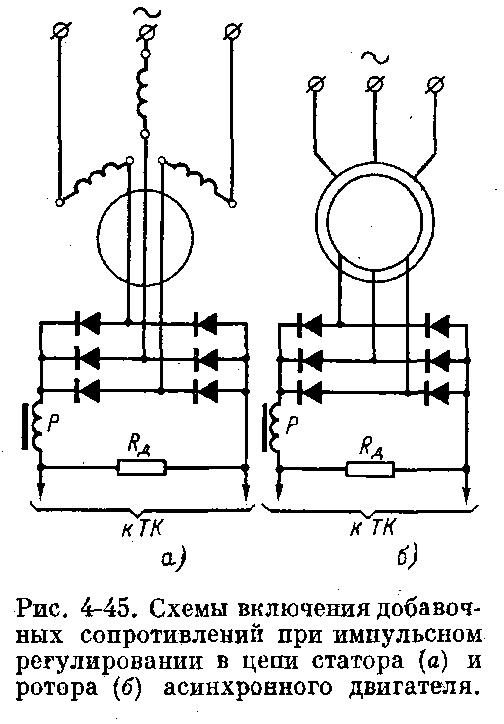 .
.
Если количество лампочек в такой решетке удвоить, поместив дополнительные лампочки между существующими лампочками (чтобы сохранить ту же длину решетки), кажущаяся скорость уменьшится вдвое: с меньшим расстоянием между каждой парой лампочек, требуется больше циклов (больше «миганий»), чтобы последовательность прошла всю длину массива.
Аналогичным образом, статору переменного тока с большим количеством полюсов по окружности потребуется больше циклов мощности переменного тока, чтобы вращающееся магнитное поле совершило один оборот..
Синхронный двигатель переменного тока будет вращаться с той же скоростью, что и вращающееся магнитное поле: практический пример — 4-полюсный синхронный двигатель, вращающийся со скоростью 1800 об/мин при частоте подаваемой мощности 60 Гц.
Асинхронный двигатель переменного тока будет вращаться со скоростью немного меньшей, чем скорость магнитного поля: практический пример — 4-полюсный асинхронный двигатель, вращающийся со скоростью 1720 об/мин при частоте подаваемой мощности 60 Гц (т. е. скорость «скольжения» 80 об/мин).
е. скорость «скольжения» 80 об/мин).
проще как по конструкции, так и в эксплуатации, что делает их наиболее популярными в промышленности из двух типов электродвигателей переменного тока.
В то время как количество полюсов в статоре двигателя является величиной, фиксированной6 во время изготовления двигателя, частота подаваемой мощности может быть отрегулирована с помощью надлежащей электронной схемы.
Цепь высокой мощности, предназначенная для создания различных частот для работы двигателя переменного тока, называется частотно-регулируемым приводом или ЧРП.
Приводы с частотно-регулируемым двигателем — невероятно полезные устройства, поскольку они позволяют тому, что обычно является электродвигателем с фиксированной скоростью, обеспечивать полезную мощность в широком диапазоне скоростей.
К преимуществам работы с переменной скоростью относятся снижение энергопотребления (двигатель вращается только с той скоростью, которая необходима для его движения, но не быстрее), снижение вибрации (меньше скорость = уменьшение вибрационных сил) и возможность линейного увеличения скорости двигателя.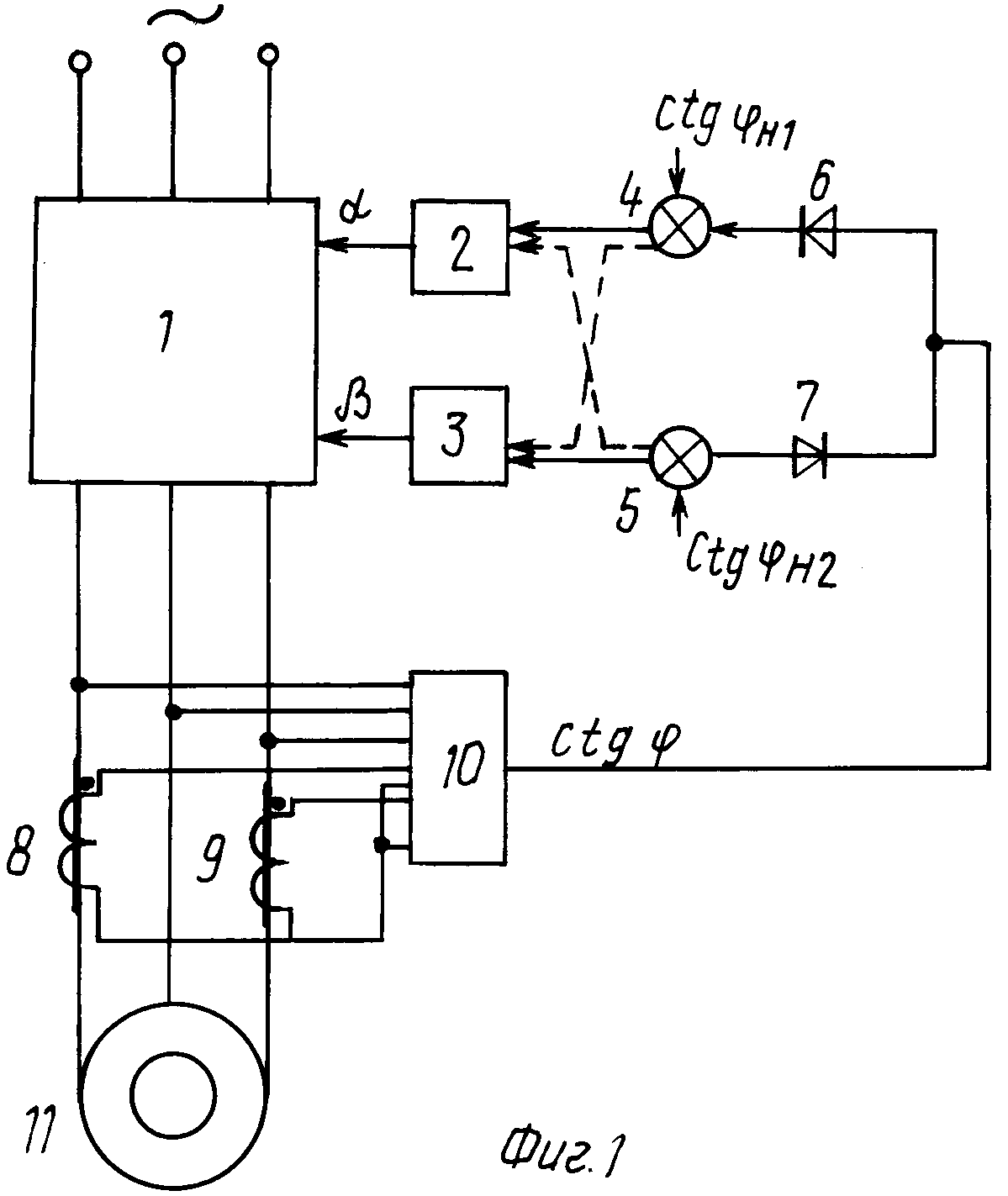 и вниз для уменьшения износа механических компонентов в результате ускорения.
и вниз для уменьшения износа механических компонентов в результате ускорения.
Еще одна особенность, характерная для большинства частотно-регулируемых приводов, — способность активно тормозить нагрузку. Это когда привод заставляет двигатель активно прикладывать отрицательный крутящий момент к нагрузке, чтобы замедлить ее.
Некоторые частотно-регулируемые приводы даже обеспечивают рекуперацию кинетической энергии нагрузки во время процесса торможения, что приводит к дополнительной экономии энергии.
Приводы двигателей переменного тока с переменной частотой состоят из электронных компонентов для преобразования входной мощности переменного тока постоянной частоты в выходную мощность переменного тока переменной частоты (и переменного напряжения) для работы двигателя. Обычно это происходит в трех отдельных разделах.
В секции выпрямителя используются диоды для преобразования мощности переменного тока в постоянный.Фильтр «сглаживает» выпрямленную мощность постоянного тока, поэтому пульсации напряжения минимальны. Наконец, секция инвертора повторно преобразует отфильтрованную мощность постоянного тока обратно в переменный ток, только на этот раз с любыми уровнями частоты и напряжения, которые необходимы для работы двигателя на разных скоростях.
Наконец, секция инвертора повторно преобразует отфильтрованную мощность постоянного тока обратно в переменный ток, только на этот раз с любыми уровнями частоты и напряжения, которые необходимы для работы двигателя на разных скоростях.
Здесь показана упрощенная принципиальная схема частотно-регулируемого привода с секцией выпрямителя слева (для преобразования входной мощности переменного тока в постоянный), конденсатором фильтра для «сглаживания» выпрямленной мощности постоянного тока и транзисторным «мостом» для переключения постоянного тока. в переменный ток любой частоты, необходимой для питания двигателя.
Обратите внимание на диоды, подключенные в обратном порядке на клеммах истока и стока каждого силового транзистора. Эти диоды служат для защиты транзисторов от повреждения при обратном падении напряжения, но они также позволяют двигателю «обратно подавать» питание на шину постоянного тока (действуя как генератор), когда скорость двигателя превышает скорость вращающегося магнитного поля, что может происходит, когда привод дает команду двигателю снизить скорость.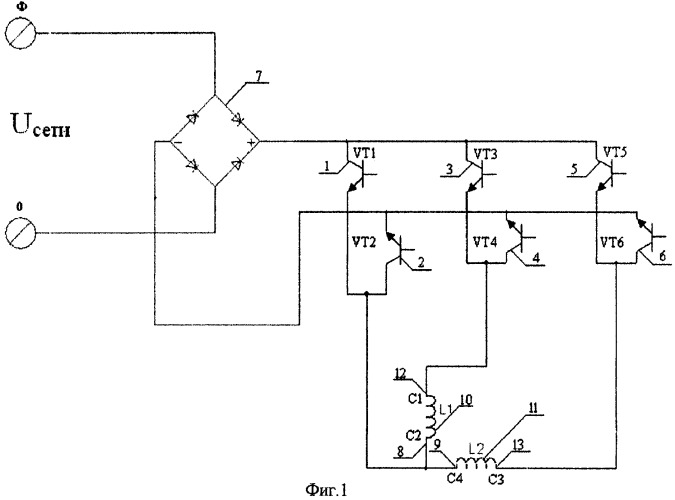 Это приводит к интересным возможностям, таким как рекуперативное торможение с добавлением дополнительных компонентов.
Это приводит к интересным возможностям, таким как рекуперативное торможение с добавлением дополнительных компонентов.
Схема управления транзистором не показана на этой схеме для простоты:
Как и в приводах с двигателями постоянного тока (VSD), силовые транзисторы в приводах переменного тока (VFD) включаются и выключаются очень быстро с переменным рабочим циклом. Однако, в отличие от приводов постоянного тока, рабочий цикл силовых транзисторов привода переменного тока должен быстро изменяться, чтобы синтезировать форму волны переменного тока из напряжения «шины» постоянного тока, следующего за выпрямителем.
Рабочий цикл ШИМ цепи привода постоянного тока управляет мощностью двигателя, поэтому она останется на постоянном уровне, когда желаемая мощность двигателя постоянна.
Не так для схемы привода двигателя переменного тока: ее рабочий цикл должен неоднократно изменяться от нуля до максимума и обратно до нуля, чтобы создать форму волны переменного тока для работы двигателя.
На следующем рисунке показана эквивалентность между быстро изменяющимся сигналом широтно-импульсной модуляции (ШИМ) и синусоидальным сигналом:
Эта концепция быстрого переключения транзисторов ШИМ позволяет приводу «вырезать» любой сигнал произвольной формы из отфильтрованного постоянного напряжения, которое он получает от выпрямителя.
Может быть синтезирована практически любая частота (вплоть до максимальной, ограниченной частотой импульсов ШИМ) и любое напряжение (вплоть до максимального пика, установленного напряжением на шине постоянного тока), что дает частотно-регулируемому приводу возможность питать асинхронный двигатель от широкий диапазон скоростей.
Хотя управление частотой является ключом к управлению скоростью синхронных и асинхронных двигателей переменного тока, его самого по себе, как правило, недостаточно.
В то время как скорость двигателя переменного тока является прямой функцией частоты (контролируя, насколько быстро вращающееся магнитное поле вращается по окружности статора), крутящий момент является функцией тока статора.
Поскольку обмотки статора по своей природе являются катушками индуктивности, их реактивное сопротивление зависит от частоты по формуле XL = 2πfL. Таким образом, с увеличением частоты реактивное сопротивление обмотки увеличивается вместе с ней. Это увеличение реактивного сопротивления привело бы к уменьшению тока статора, если бы выходное напряжение частотно-регулируемого привода оставалось постоянным.
Этот нежелательный сценарий может привести к потере крутящего момента на высоких скоростях и чрезмерному крутящему моменту (а также чрезмерному нагреву статора!) на низких скоростях. По этой причине выходное напряжение переменного тока частотно-регулируемого привода изменяется (примечание) пропорционально приложенной частоте, так что ток статора остается в хороших рабочих пределах во всем диапазоне скоростей частотно-регулируемого привода.
Это соответствие называется отношением напряжения к частоте, сокращенно «V/F» или «V/Hz».
Примечание. ЧРП обеспечивает переменное выходное напряжение с помощью той же техники, что и для создания переменной выходной частоты: быстрой широтно-импульсной модуляции напряжения на шине постоянного тока через выходные транзисторы.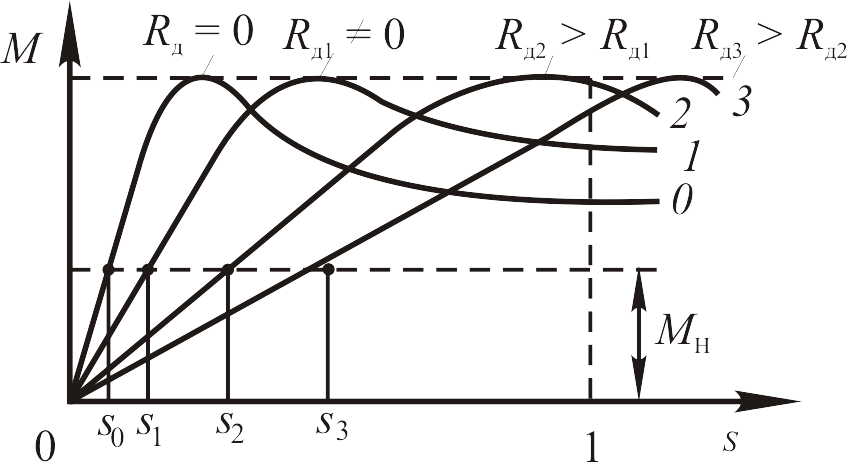 Когда необходимо более низкое выходное напряжение, коэффициент заполнения импульсов уменьшается на протяжении всего цикла (т. е. транзисторы включаются на более короткие периоды времени), чтобы генерировать более низкое среднее напряжение синтезированной синусоиды.
Когда необходимо более низкое выходное напряжение, коэффициент заполнения импульсов уменьшается на протяжении всего цикла (т. е. транзисторы включаются на более короткие периоды времени), чтобы генерировать более низкое среднее напряжение синтезированной синусоиды.
Чтобы привести пример частотно-регулируемого привода, запрограммированного с постоянным соотношением V/F, если выходное линейное напряжение двигателя составляет 480 вольт (среднеквадратичное значение) при полной скорости (60 Гц), то выходное линейное напряжение должно быть 240 вольт (среднеквадратичное значение) при половинной скорости. скорости (30 Гц) и 120 вольт RMS на четверти скорости (15 Гц).
Частотно-регулируемые приводы двигателей производятся для управления промышленными двигателями в широком диапазоне размеров и мощностей.
Некоторые частотно-регулируемые приводы достаточно малы, чтобы их можно было держать в руке, в то время как другие настолько велики, что для их перевозки требуется грузовой поезд.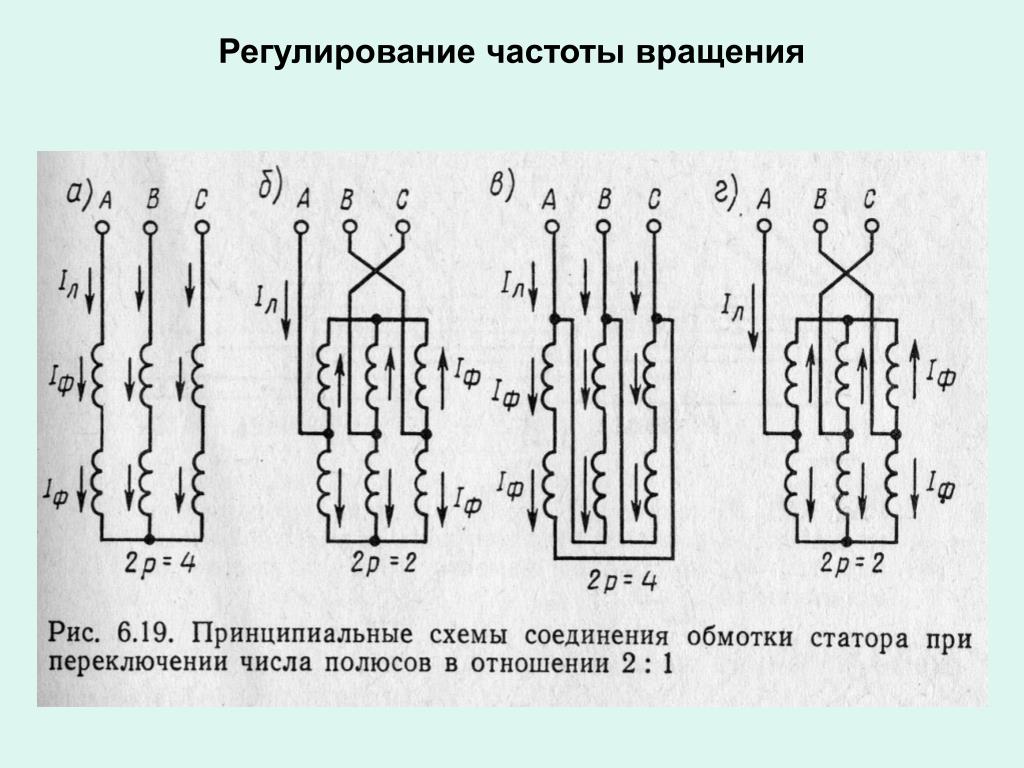 На следующей фотографии показана пара частотно-регулируемых приводов Allen-Bradley среднего размера (около 100 лошадиных сил каждый, высота около 4 футов), используемых для управления насосами на очистных сооружениях:
На следующей фотографии показана пара частотно-регулируемых приводов Allen-Bradley среднего размера (около 100 лошадиных сил каждый, высота около 4 футов), используемых для управления насосами на очистных сооружениях:
Приводы с двигателем переменного тока с переменной частотой не требуют обратной связи по скорости двигателя, как это требуется для приводов с двигателем постоянного тока с переменной скоростью. Причина этого довольно проста: регулируемой переменной в приводе переменного тока является частота мощности, подаваемой на двигатель, а двигатели переменного тока с вращающимся магнитным полем по своей природе являются машинами с частотным регулированием.
Например, 4-полюсный асинхронный двигатель переменного тока с частотой 60 Гц имеет базовую скорость 1728 об/мин (при условии скольжения 4%). Если частотно-регулируемый привод подает на этот двигатель мощность переменного тока частотой 30 Гц, его скорость будет примерно вдвое ниже базовой, или 864 об/мин.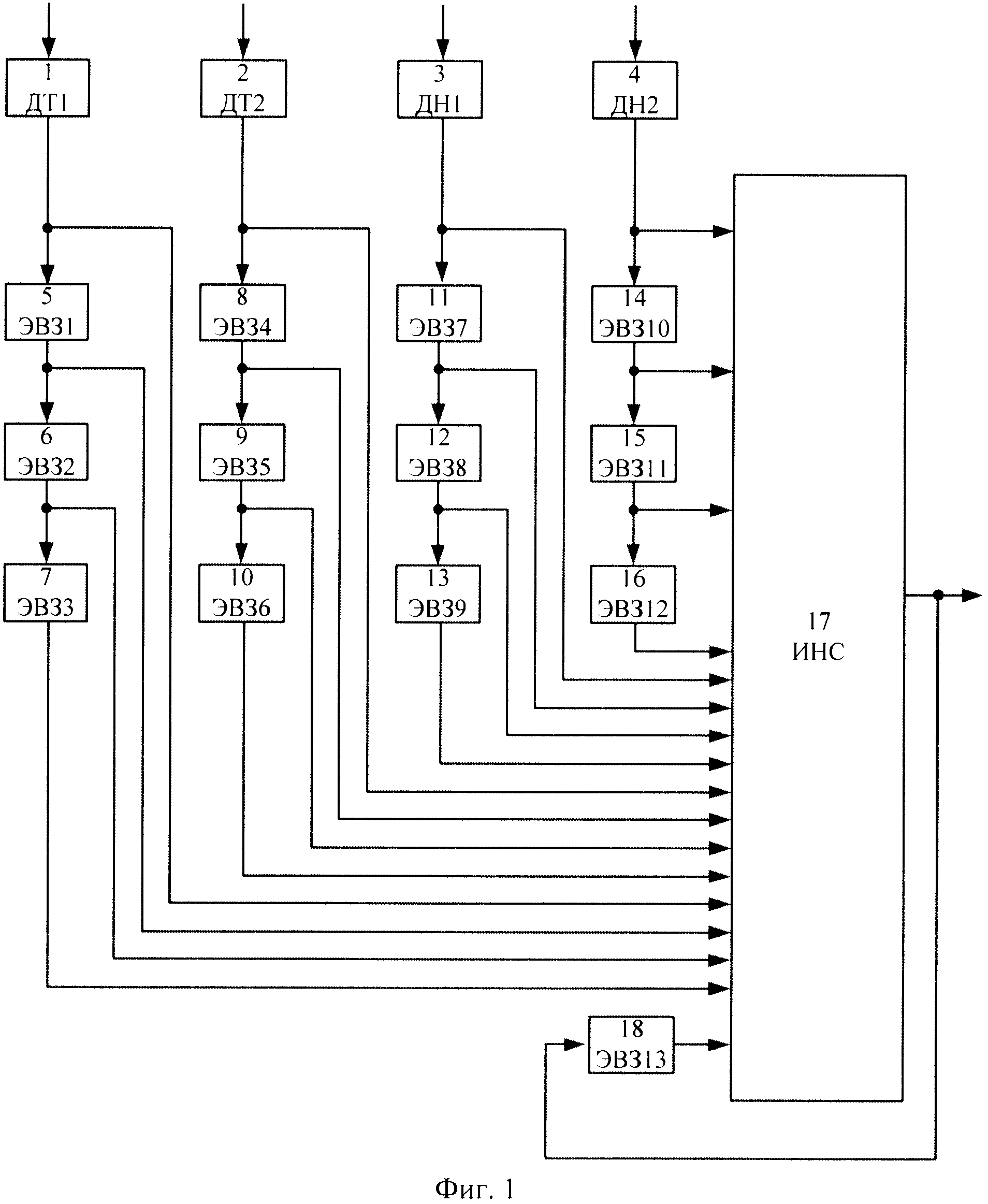
На самом деле нет необходимости в обратной связи по скорости в приводе переменного тока, потому что реальная скорость двигателя всегда будет ограничена выходной частотой привода.
Управление частотой означает управление скоростью двигателя для синхронных и асинхронных двигателей переменного тока, поэтому для привода переменного тока не требуется обратная связь от тахогенератора, чтобы «знать» приблизительно9 скорость вращения двигателя.
Отсутствие необходимости в обратной связи по скорости для приводов переменного тока устраняет потенциальную угрозу безопасности, характерную для приводов постоянного тока: возможность «разгона», когда привод теряет сигнал обратной связи по скорости и передает полную мощность двигателю.
Как и в случае приводов с двигателем постоянного тока, цепи ЧРП создают много электрических «шума». Импульсные сигналы с прямоугольным фронтом, создаваемые быстрым включением и выключением силовых транзисторов, эквивалентны бесконечным сериям высокочастотных синусоидальных волн, некоторые из которых могут иметь достаточно высокую частоту, чтобы самораспространяться в пространстве как электромагнитные волны.
Эти радиочастотные помехи или РЧ-помехи могут быть довольно серьезными, учитывая высокие уровни мощности цепей привода промышленных двигателей. По этой причине крайне важно, чтобы ни проводники питания двигателя, ни проводники, подающие питание переменного тока на схему привода, не прокладывались рядом с проводкой слабого сигнала или проводкой управления, потому что наведенный шум нанесет ущерб любым системам, использующим эти сигналы низкого уровня. .
Помехи радиочастотных помех в проводниках питания переменного тока можно уменьшить, направив питание переменного тока через фильтрующие цепи, расположенные рядом с приводом.Схемы фильтров блокируют обратное распространение высокочастотного шума на остальную часть проводки распределения питания переменного тока, где он может повлиять на другое электронное оборудование. Тем не менее, мало что можно сделать с шумом РЧ-помех между приводом и двигателем, кроме как экранировать проводники в хорошо заземленном металлическом кабелепроводе.
(PDF) ОБЗОР МЕТОДОВ УПРАВЛЕНИЯ СКОРОСТЬЮ АИНХРОННОГО ДВИГАТЕЛЯ
ISSN: 2348 9510
International Journal Of Core Engineering & Management (IJCEM)
Volume 3, Issue 5, August 2016
123 90 кульминация нечеткого вывода в фактические входные данные для системы
называется дефаззификацией.По сути, дефаззификация дает значительный результат в виде четкой логики, основанной на соответствующих функциях принадлежности и нечетких множествах.
IV. ЗАКЛЮЧЕНИЕ
В этом документе рассмотрено происхождение и развитие методов управления скоростью, а также анализ их эффективности на
асинхронном двигателе. Сначала был внимательно рассмотрен основной принцип управления скоростью и произведено сравнение
. Позже демонстрируются различные современные методики и методично анализируются разработки.Наконец, был сделан вывод, что применение современного интеллектуального метода, такого как нечеткая логика
, улучшает динамические характеристики двигателя, уменьшает пульсации крутящего момента и поток статора.
БЛАГОДАРНОСТЬ
Авторы выражают признательность за поддержку, предоставленную Universiti Tenaga National и всем лицам
, которые прямо или косвенно участвуют в этой работе.
ССЫЛКИ
[1] Buja, G., Casadei, D. и Serra, G. 1997. Прямое управление крутящим моментом асинхронных двигателей.IEEE транс. Инд.
Заяв. Каталожный номер 97TH8280, стр. 130-137.
[2] Депенброк, М. 1987. Прямое самоуправление (DSC) асинхронной машины с инверторным питанием. IEEE транс. Мощность
Электр. 3: 420-429.
[3] Guohanin and Xu, Z. 2010. Прямое управление крутящим моментом асинхронного двигателя на основе нечеткой логики. проц.
Междунар. конф. на компьютере инж. Технол. Том. 4, стр. 651-654.
[4] В.И.Ибрагим, М.Т.Раджа, Исмаил, М.Р.Газ Али, «Разработка частотно-регулируемого привода для однофазного асинхронного двигателя
на основе управления частотой»,
[5]Аунг Зо Латт, доктор Ни Ни Вин, «Привод с регулируемой скоростью однофазного асинхронного двигателя с использованием метода управления частотой
», Международная конференция по образовательным технологиям и компьютерам, 2009 г.
[6] Д. С. Хендерсон, «Электроприводы с регулируемой скоростью — Характеристики и применение Регулируемая частота
Рассмотрение основных принципов управления (инверторов), бюллетень C870A.
[7] Теодор Вилиди. 1997. Приводы электрических машин и энергосистемы Prentice Hall, Inc.
[8] Фарзан Рашиди, «Бессенсорное управление скоростью асинхронных двигателей с использованием надежного и адаптивного интеллектуального контроллера на основе нейро-нечеткой технологии
», Международная конференция IEEE по промышленным технологиям (ICIT),
2004
Что такое управление скоростью Метод асинхронных двигателей
Здравствуйте, ребята, надеюсь, вам всем весело в жизни. В сегодняшнем уроке мы рассмотрим метод управления скоростью асинхронных двигателей. Есть много двигателей, работающих в нашей среде, некоторые из них работают в наших домах, а некоторые в промышленности, чтобы упростить нашу работу. Электродвигатель в настоящее время стал важнейшим источником энергии в наших различных инженерных работах. Назначение и производительность, необходимые для этих двигателей, имеют множество диапазонов. Когда мы обсуждаем часть управления скоростью различных двигателей, мы знаем, что шаговый двигатель и серводвигатели регулируют свою скорость с помощью последовательности импульсов или импульсной волны (импульсная волна или последовательность импульсов — это тип несинусоидальной формы волны, которая включает в себя прямоугольные волны и аналогичные периодические, но асимметричные волны).Но асинхронные двигатели и бесщеточные двигатели постоянного тока регулируют (контролируют) свою скорость с помощью внешнего сопротивления или постоянного напряжения.
Асинхронные двигатели имеют постоянную скорость, что означает, что при всех изменениях нагрузки они имеют почти одинаковую скорость. Регулирование скорости шунтового двигателя постоянного тока может быть изменено без потери его эффективности, но в случае асинхронного двигателя изменение скорости приводит к снижению его эффективности и потери коэффициента мощности. Как мы знаем, почти в каждой отрасли промышленности и в наших домах работает асинхронный двигатель, поэтому его коэффициент регулирования скорости требуется во многих приложениях.В этом посте мы обсудим различные методы управления скоростью асинхронных двигателей и другими их параметрами. Итак, давайте начнем с Что такое метод управления скоростью асинхронных двигателей.
Каковы методы управления скоростью асинхронных двигателей
- До изобретения современных твердотельных приводов асинхронные двигатели не считались подходящими для таких приложений, где требуется изменение скорости.
- Для нормальной работы асинхронный двигатель ограничен работой при скольжении менее пяти процентов, и изменение скорости в этом диапазоне почти прямо пропорционально нагрузке двигателя.
- Хотя, если мы увеличим скольжение двигателя, КПД уменьшится, так как мы обсуждали, что потери в меди на роторе (P RCL ) прямо пропорциональны скольжению (S) двигателя. Вспомните эту формулу.
P RCL = SP AG
- Существует два метода контроля (управления) скорости асинхронного двигателя.
- Первый – изменить синхронную скорость (n sync ), которая представляет собой скорость вращения магнитного поля статора и ротора.
- Второй способ заключается в изменении скольжения (скольжения) двигателя в соответствии с нагрузкой на вал двигателя.
- Синхронная скорость (n sync ) асинхронного двигателя определяется по этой формуле
(n синхронизация ) =120 (f e /p)
- Из этого уравнения видно, что первый метод изменения синхронной скорости заключается в изменении электрической частоты, а второй — в изменении количества полюсов двигателя.
- Контроль скольжения можно выполнить, изменив сопротивление ротора или напряжение на клеммах (V T ) двигателя.
Методы управления скоростью асинхронных двигателей
- Существует множество способов управления скоростью асинхронного двигателя. Эти методы описаны ниже.
- Регулирование скорости асинхронного двигателя путем переключения полюсов.
- Управление скоростью асинхронного двигателя путем изменения частоты сети.
- Управление скоростью асинхронного двигателя путем изменения сетевого напряжения.
- Управление скоростью асинхронного двигателя путем изменения сопротивления ротора.
Давайте обсудим эти методы один за другим с подробным описанием.
Регулирование скорости асинхронного двигателя путем переключения полюсов
- Существует 2 способа изменения количества полюсов в асинхронных двигателях для регулирования скорости двигателя. Эти два описаны ниже.
- Несколько крыльев статора.
- Метод последовательных полюсов.
- Техника вариации полюсов более старая, впервые она была использована в 1897 году.
- Этот метод работает на том факте, что полюса в установленных витках можно варьировать с коэффициентом (2:1), просто изменяя соединения витков витков.
- На приведенной схеме вы можете видеть, что статор 2-полюсного асинхронного двигателя, к которому мы должны применить технику смены полюсов.
- Из диаграммы видно, что каждая катушка имеет очень маленькое значение шага, примерно от шестидесяти до девяноста градусов.
- Ребята на приведенной ниже схеме видно, что фазная обмотка нарисована отдельно для наглядности.
- Мы можем видеть в цепи, которая обозначена на схеме как (a) , она описывает направление тока, протекающего в фазе a крыльев статора во время нормальной работы.
- Вы можете видеть, что поле оставило статор в верхней группе фаз (полюс N) и перешло в статор в группе нижних фаз (полюс S).
- Эти крылья теперь образуют 2 полюса на статоре.
- Теперь давайте предположим, что направление тока (I), движущегося в нижней группе фаз на статоре, инвертировано, тогда левое поле, определяющее часть двигателя как в нижней, так и в верхней фазной группе, будет вести себя как север (N ) столб. Это явление показано на диаграмме, а его цепь обозначена буквой b на диаграмме.
- Поток в этом двигателе должен возвращаться к статору между двумя группами фаз, что создает пару результирующих южных (S) магнитных полюсов.
- Обратите внимание, что теперь на статоре 4 полюса, в два раза больше, чем у предыдущего двигателя.
- Ротор в этом двигателе имеет конструкцию клетки, как ротор клетки, потому что у этого ротора всегда такое же количество полюсов, как и у статора, и он может изменить свой полюс, так как ни один из полюсов не меняется на статоре.
- При переключении двигателя с 2-х полюсного на 4-х полюсный результирующий экстремальный крутящий момент асинхронного двигателя может быть таким же, как раньше (присоединение с постоянным крутящим моментом), или половиной его предыдущего значения (квадратичная зависимость в сборе, который используется для вентиляторов), или в два раза больше предыдущего значения (сборка с постоянной выходной мощностью), в зависимости от того, как переставлены лопасти статора.
- На данной диаграмме показаны вероятные контакты статора и их влияние на кривую момент-скорость.
Недостаток последовательно-полюсного метода изменения скорости
- Основным недостатком последовательно-полюсного метода изменения скорости должна быть скорость в соотношении (2:1).
- Старый метод преодоления этого ограничения заключался в использовании нескольких крыльев статора с измененным числом полюсов и подаче питания на один набор крыльев за раз.
- Например, двигатель мог быть намотан с 4-полюсным и 6-полюсным набором статорных крыльев, а его синхронная (n syn ) скорость по шестидесятигерцовой схеме могла переключаться от (1800 до 1200 об/мин). мин) только путем подачи питания на другой набор крыльев.
- Бестактно многочисленные статорные обмотки увеличивают расход двигателя и поэтому используются только в случае крайней необходимости.
- Объединив технологию результирующих полюсов с многочисленными статорными обмотками, можно создать 4-скоростной асинхронный двигатель.
- Например, с изолированными 4-х и 6-ти полюсными лопастями можно сделать двигатель частотой 60 Гц, способным работать при (600, 900, 1200 и 1800 об/мин).
- Если мы изменим частоту, подаваемую на статор, то изменение вращательного магнитного поля будет прямо пропорционально изменению частоты и кривой крутящий момент-скорость, положение точки холостого хода также будет меняться, вы можете наблюдать это изменение на заданной схеме.
- Синхронная скорость (n sync ) двигателя при номинальных условиях называется базовой скоростью .
- Изменяя частоту, можно установить скорость двигателя меньше или больше базовой скорости.
- Точно спроектированный частотно-регулируемый асинхронный двигатель может быть очень гибким.
- Он может изменить скорость двигателя от пяти процентов до двухкратной базовой скорости.
- Чтобы обеспечить продолжительную и безопасную работу двигателя, при изменении частоты должен быть крутящий момент, а напряжение должно быть на определенном уровне.
- Когда двигатель работает на скорости ниже базовой скорости, необходимо уменьшить приложенное напряжение на статоре для правильной работы двигателя.
- Снижение приложенного напряжения статора должно быть линейным с уменьшением частоты статора. Эта процедура известна как «Если мы этого не сделаем, уровень насыщения материала сердечника, которым является сталь, увеличится, и через двигатель будет проходить большой ток намагничивания».
- Чтобы узнать требования по снижению номинальных характеристик, вспомните, что асинхронный двигатель в основном представляет собой револьверный (вращающийся) трансформатор.
- Как мы знаем, в трансформаторе значение потока в сердечнике трансформатора можно измерить по закону электромагнитной индукции Фарадея.
В(t) = -N (dø/dt)
- Если на сердечник подается напряжение (V(t) = V M Sinwt), то результирующий поток будет равен.
Ø(t)=1/N р
=1/N р
Ø(t)=Vm/wN P (coswt)
- Из уравнения видно, что частота выходит из знаменателя.
- Таким образом, если частота, подаваемая на статор, уменьшится на десять процентов, в то время как величина напряжения, подаваемого на статор, останется постоянной, поток в сердечнике двигателя возрастет почти на десять процентов, а ток намагничивания (Im) мотор поднимется.
- На ненасыщенном участке кривой намагничивания двигателя скачок тока намагничивания (Im) также составит почти десять процентов.
- Однако в области насыщения кривой намагничивания двигателя увеличение магнитного потока на десять процентов требует более высокого увеличения тока намагничивания (Im).
- Асинхронные двигатели обычно сконструированы так, чтобы работать вблизи точки насыщения на их кривых намагничивания, поэтому скачок потока из-за снижения частоты вызовет экстремальные токи намагничивания в двигателе.
- Чтобы остановить чрезмерные токи намагничивания (Im), обычно уменьшают напряжение, приложенное к статору, прямо пропорционально уменьшению частоты, когда частота становится ниже номинальной частоты двигателя.
- Из приведенного уравнения видно, что напряжение, приложенное к статору, находится в числителе уравнения, а частота находится в знаменателе этого уравнения, поэтому мы можем сделать вывод, что эти 2 противодействуют друг другу, а ток намагничивания не изменяется.
Ø(t)=(Vm/wN P ) (coswt)
- Когда напряжение, подаваемое на двигатель, изменяется линейно с частотой меньше базовой скорости, значение потока в роторе остается почти постоянным.
- Таким образом, предельный крутящий момент, который может обеспечить двигатель, также остается выше. Но номинальная мощность двигателя должна уменьшаться с уменьшением частоты, чтобы избежать перегрева схемы статора.
- Мощность, подаваемая на трехфазный асинхронный двигатель, может быть определена по формуле .
P=√3V L I L cosø
- Из этого уравнения видно, что по мере уменьшения V L мощность также будет уменьшаться, и в результате увеличивается ток, что вызывает перегрев двигателя.
- Учитывая, что на диаграмме показана группа кривых характеристики крутящего момента асинхронного двигателя и скорости для скоростей ниже базовой скорости, предположим, что величина напряжения статора колеблется линейно с частотой.
- Когда частота, подаваемая на двигатель, превышает значение номинальной частоты двигателя, напряжение статора остается постоянным на номинальных значениях.
- Хотя меры по насыщению позволяют поднять напряжение выше номинального значения в таких условиях, оно ограничено номинальным напряжением, чтобы обеспечить защиту изоляции обмоток двигателя.
- Чем больше частота выше базовой скорости, тем выше будет знаменатель уравнения.
Ø(t)=(Vm/wN P ) (coswt)
- При этом параметры числителя остаются постоянными выше номинальной частоты, результирующий магнитный поток в двигателе снижается, а вместе с ним снижается и предельный крутящий момент.
- На данной диаграмме показана группа кривых асинхронного двигателя от скорости вращения для скоростей выше базовой скорости, при условии, что напряжение статора остается постоянным.
- Если напряжение на статоре изменяется линейно с частотой ниже базовой скорости и остается постоянным при номинальном значении выше базовой скорости, то результирующая группа моментно-скоростных характеристик изображается на данном графике. номинальная скорость двигателя 1800 об/мин.
Недостаточное управление скоростью двигателя путем изменения частоты сети
- Несколько лет назад основным недостатком была необходимость в специальном генераторе или механическом преобразователе частоты для изменения частоты питания.
- Эта проблема исчезла с развитием современных полупроводниковых частотно-регулируемых электроприводов.
- Фактически, изменение частоты в полупроводниковых электроприводах стало необходимым методом управления скоростью путем изменения частоты.
- Главное, что вы должны иметь в виду, что этот метод может применяться к любому асинхронному двигателю для управления скоростью, но метод смены полюсов не применим ни к одному двигателю без специальных крыльев статора.
Управление скоростью асинхронного двигателя путем изменения сетевого напряжения
- Крутящий момент асинхронного двигателя прямо пропорционален квадрату приложенного напряжения.
- Если нагрузка на валу асинхронного двигателя имеет моментно-скоростную характеристику, как показано на данной схеме, то скорость асинхронного двигателя можно регулировать (контролировать) в определенных пределах путем изменения напряжения сети.
- Управление скоростью методом изменения сетевого напряжения используется для небольших двигателей, таких как двигатель вентилятора.
Управление скоростью асинхронного двигателя путем изменения сопротивления ротора
- В случае асинхронного двигателя с фазным ротором можно изменить фигуру кривой крутящий момент-скорость, добавив дополнительные резисторы в схему ротора асинхронного двигателя.
- После добавления резистора в цепи ротора на данной диаграмме показана новая кривая характеристики момент-скорость.
- Если у нас есть кривая крутящий момент-скорость нагрузки двигателя, как показано на данной диаграмме, то изменение сопротивления ротора будет изменять скорость двигателя.
- Но добавление дополнительных резисторов в цепь ротора снизит КПД двигателя.
- Этот метод изменения скорости обычно используется в течение короткого промежутка времени из-за потери эффективности двигателя.
Вы также можете прочитать статьи об асинхронном двигателе. Это описано здесь.
Это подробный и хорошо объясненный учебник по методу управления скоростью асинхронных двигателей, я упомянул все и все, что связано с методом управления скоростью асинхронных двигателей. Если у вас есть какие-либо вопросы, можете задать их в комментариях. Увидимся в следующем руководстве, Твердотельные асинхронные двигатели.
Автор: Генри
http://www.theengineeringknowledge.comЯ профессиональный инженер, выпускник известного инженерного университета, также имею опыт работы инженером в различных известных отраслях.Я также являюсь автором технического контента, мое хобби — исследовать новые вещи и делиться ими с миром. Через эту платформу я также делюсь своими профессиональными и техническими знаниями со студентами инженерных специальностей.
Управление скоростью асинхронного двигателя с использованием модели уменьшенного порядка
1. Введение
Асинхронные двигатели (АД) широко используются как в промышленности, так и в быту. Они обладают рядом привлекательных характеристик, таких как низкая стоимость, надежность, безыскровая работа, низкие требования к техническому обслуживанию и способность создавать высокий крутящий момент.Несмотря на эти особенности, проектирование управления для АД остается сложной задачей, прежде всего, по двум основным причинам: (1) нелинейная модель и (2) недоступность полной информации о состоянии. Поэтому они по-прежнему находятся в центре внимания современных исследовательских работ, посвященных новым, эффективным и действенным методам проектирования управления для АД.
Поле-ориентированное управление (FOC), также называемое векторным управлением, введенное Блашке [1], представляет собой метод управления АД, посредством которого компоненты токов статора, создающие крутящий момент, и намагничивающие компоненты разъединяются посредством математических преобразований, ведущих к упрощению задачи управления, подобно двигателю постоянного тока.FOC также дает хорошую переходную характеристику, что делает его подходящим методом для высокоэффективного управления АД [2,3].
Ключевыми этапами проектирования управления АД являются его синтез и оценка стабильности. Контроль IM с помощью FOC часто рассматривался в прошлых исследованиях. Сообщаемые работы включают нелинейные методы управления, такие как линеаризация обратной связи по входу-выходу [4, 5], управление скользящим режимом и наблюдатели скользящего режима [6, 7], адаптивное управление [8], адаптивное управление скользящим режимом [9], обратное управление [9]. 10], а также охватывают такие методы, как стохастическое итеративное управление обучением [11], адаптивное подавление возмущений [12] и автоматическое подавление возмущений [13].Классический пропорционально-плюс-интегральный (PI) также продолжает использоваться в недавних работах с некоторыми вариациями, такими как гибридный нечеткий PID [14] и PI-управление с интегральным антизаключением [15].
В большинстве этих работ для проектирования управления используется полная модель пятого порядка, поскольку она охватывает большинство переходных эффектов и очень близко соответствует реальной машине. Доказательство устойчивости замкнутого контура для этой модели полного порядка при наличии неизвестной информации, такой как поток и момент нагрузки, остается проблемой.С этой точки зрения предыдущие работы имеют некоторые ограничения: они либо требуют тщательного выбора параметров для сходимости [13], являются аналитически сложными [11], либо не подтверждают устойчивость системы управления с обратной связью [13,14,16]. Существуют некоторые работы [17], в которых предложены упрощенные модели для удобного захвата переходных эффектов (таких как эффект глубокой полосы и насыщения) для приложений с высокой мощностью. Однако основное внимание в этой работе уделяется управлению скоростью в установившемся режиме. Имея это в виду, эта работа направлена на упрощение задачи синтеза контроллера и анализа устойчивости за счет использования модели пониженного порядка при достижении высокой производительности для установившегося управления скоростью.Мы показываем, что, пренебрегая некоторой динамикой, модель полного порядка близко аппроксимируется моделью пониженного порядка, а переходные эффекты усредняются. Представленный подход имеет тройное преимущество: (1) скорость и поток напрямую связаны со своими индивидуальными управляющими переменными, а не через промежуточные величины, и, следовательно, могут управляться напрямую, (2) более простая структура управления реализуется в результате снижение порядка и (3) анализ стабильности облегчаются более простой структурой управления, несмотря на наличие неизвестных переменных, таких как поток и момент нагрузки.Кроме того, стабильная производительность остается практически неизменной. Установление устойчивости с обратной связью осуществляется путем развития обобщенной версии результатов, представленных в [18], и теперь может быть применено к системам более высокого порядка; еще один вклад в эту работу. Схема, представленная в данном документе, измеряет ток и скорость, а также оценивает неизвестный поток и крутящий момент нагрузки через наблюдателей, что приводит к топологии управления на основе наблюдателя.
2. Моделирование
Нелинейная модель ИМ пятого порядка в системе отсчета dq может быть записана в виде [19]: (1) где состояние x , вход u и выход y равны (2) и (3)
Здесь нижние индексы обозначают величины статора и ротора соответственно, нижние индексы обозначают и количества, φ представляет поток, i представляет ток, обозначает электрическую угловую частоту статора, Ω обозначает механический угловой скорость, p обозначает пары полюсов, v обозначает входное напряжение, обозначает входной момент нагрузки и J обозначает момент инерции ротора.Вспомогательные величины определяются как , , , , , , где R обозначает сопротивление, L обозначает циклическую индуктивность, M обозначает взаимную циклическую индуктивность и обозначает коэффициент вязкого трения.
3. Линеаризующее управление с обратной связью по полю
3.1. Конструкция контроллера
В ВОК синхронная система отсчета выбирается таким образом, чтобы весь поток проходил вдоль оси с . Из (1) можно показать, что этого можно достичь, выбрав в качестве (10) и достигнув «ориентации поля» с помощью .Следовательно, модель третьего порядка (7) редуцируется еще на один порядок и может быть записана в виде (11) где (12) следует из подстановки (5). Подстановка (12) в (11) приводит к окончательной модели второго порядка, используемой для разработки системы управления: (13)
Замечание 3.1Обратите внимание, что динамика потока в (13) полностью независима от динамики скорости, а текущие измерения легко доступны. , потоком можно напрямую управлять с входа напряжения . Точно так же теперь можно управлять скоростью Ω с входа напряжения .Другими словами, модель связывает контролируемые переменные, т. е. и Ω, непосредственно с управляющими переменными и , соответственно. Напротив, при использовании модели полного порядка (1) часто требуется, чтобы поток и скорость сначала регулировались с помощью промежуточных переменных, а именно токов, которые затем должны регулироваться до определенных эталонов, как того требует управление потоком и скоростью, через напряжения (например, обратное управление, см. [10,19]). Этот многошаговый подход приводит к сложному закону управления, анализ устойчивости которого еще более усложняется неизвестными величинами, такими как поток и крутящий момент нагрузки.Таким образом, упрощение, достигнутое с помощью модели (13), упрощает задачу проектирования контроллера, а также облегчает анализ устойчивости.
Определим новые величины ошибок как (14) где – эталонный поток для , – его оценка (оба в ), – эталонная скорость в , – оценка момента нагрузки в . Динамика ошибки потока и ошибки скорости может быть записана с использованием (13) и (14) как (15) Выбирая и в (15) как (16) с положительными константами и, которые необходимо выбрать, и оценить как (17) получаем (18) Из первых трех уравнений в (14) можно записать (19) Из (10), (17) и (14) получаем (20) Подстановка (19) и (20) в ( 18) ведет к (21)
3.3. Анализ устойчивости
Для оценки устойчивости замкнутого управления на основе наблюдателя мы разрабатываем обобщенную версию леммы A.1 из [18] и применяем ее к динамике ошибок.
Лемма 3.1Учитывая систему (33) с , .
Допущение 1: для подсистем в (33), определяемых динамикой, пусть существуют такие функции, что (34) при и (35) при и .
Предположение 2: точка равновесия подсистемы глобально экспоненциально устойчива.
Тогда точка равновесия x =0 всей системы (33) глобально экспоненциально устойчива.
Доказательство.По предположению 2 о подсистеме для любого начального условия выполняется неравенство (36) для некоторых констант и . Пусть – решение (37) Так как , можно записать (38) Определим функцию как (39) В силу (34) имеем для каждого (40), которое можно записать более компактно как (41) Дифференцируя (39 ) получить дает (42) В силу (35) имеем для каждого (43) или, точнее, как (44) В силу (38) получаем (45)
Результаты леммы 3.1 можно применить к динамике ошибок, чтобы показать их экспоненциальную сходимость к нулю.Переписывая динамику ошибок из (21), (23) и (31) и заменяя на согласно (32), получаем (46) Пусть (47) и (48) Мы можем записать систему (46) в виде (49) Ясно, что глобально экспоненциально устойчивым, удовлетворяющим предположению 2 леммы 3.1. Определим функции (50) и (51) Ясно, что (52) Таким образом, выполняется первое условие предположения 1 леммы 3.1. Дифференцирование (51) дает (53) Последние четыре члена в (53) могут быть ограничены с помощью неравенства Коши с ϵ , которое утверждает, что (54) Отсюда следует, что выполняется (55) , где (56) Следовательно, мы можем написать (57) Собирая слагаемые, получаем (58) или (59) или (60) где (61) Ясно, что .Так как все параметры и сигналы в конечны и ограничены, коэффициенты усиления и могут быть удобно выбраны с соответствующими положительными скалярами, чтобы гарантировать. Следовательно, второе условие в предположении 1 леммы 3.1 выполняется, и ошибки слежения (49) будут экспоненциально стремиться к нулю.
4. Результаты моделирования и обсуждение
Контроллер был испытан на управлении скоростью АД, управляемого трехфазным инвертором, с учетом детального переключения инвертора.Параметры двигателя приведены в таблице 1. Два имитационных тестовых примера были запущены в течение 1 с каждый: первый с заданием постоянной скорости с номинальной нагрузкой, приложенной при , а второй с заданием изменяющейся скорости, повышающимся от 120 до при , затем обратно вниз до при , и номинальная нагрузка применяется при . Опорный поток для обоих тестовых случаев был установлен на . Результаты показаны на рисунках 5–8.
Рис. 5. Регулирование скорости и реакция отслеживания, номинальная нагрузка при .
Рисунок 6.Реакция электромагнитного момента до и после приложения нагрузки.
Рис. 7. Опорный поток и отклик его оценки.
Рис. 8. Фактический крутящий момент нагрузки и его расчетная характеристика.
Из рисунка 5 видно, что контроллер демонстрирует быструю переходную реакцию как для тестовых случаев регулирования скорости, так и для отслеживания. Фактическая скорость достигает эталонного значения в течение 0,2 с для обоих тестов. Когда применяется возмущение крутящего момента нагрузки, скорость не сильно зависит от скорости, поскольку управляющее усилие вызывает мгновенное увеличение электромагнитного крутящего момента для противодействия эффектам возмущения нагрузки, как показано на рисунке 6.Соответствующие графики оценки потока и крутящего момента на рисунках 7 и 8 также показывают экспоненциальное отслеживание эталонного потока и фактического момента нагрузки соответствующими наблюдателями, при этом расчетные величины сходятся к их соответствующим эталонам менее чем за 0,2 с. Таким образом, контроллер на основе наблюдателя демонстрирует хорошие переходные и установившиеся характеристики как для сценариев регулирования скорости, так и для сценариев отслеживания.
4.1. Сравнение с ПИ-регулятором
Результаты предложенной схемы редуцированного регулирования сравнивались с обычным ПИ-регулятором, чтобы проверить его эффективность.Использовались два ПИ-регулятора; один для регулирования потока, а другой для регулирования скорости. Моделирование выполнялось с использованием первого тестового примера, описанного ранее, для сравнения характеристик регулирования скорости. Реакции скорости и потока представлены на рисунке 9. Результаты показывают, что, хотя характеристики регулирования скорости были сопоставимы для двух схем, ПИ-регулятор продемонстрировал худшие характеристики регулирования потока. Производительность наблюдателя потока ухудшилась под управлением ПИ-регулятора из-за его более слабой реакции регулирования.Предложенная схема, основанная на модели, хорошо работала в переходных и стационарных режимах, несмотря на игнорирование некоторой динамики. С другой стороны, ПИ-регулятор не полагался на модель, и, следовательно, наблюдалось большое превышение переходной траектории потока. Реакция потока также показывает, что при ПИ-регулировании потоку потребовалось больше времени, чтобы сходиться к заданному значению после применения возмущения нагрузки.
Рис. 9. Сравнение с ПИ-регулированием.
5. Заключение
В этой статье мы разработали простой метод управления скоростью АД с использованием модели пониженного порядка.Впервые показано, что модель низшего порядка с достаточной точностью аппроксимирует исходную. Когда к этой модели применяется ориентация поля, помимо присущей FOC развязки, она также дает прямую связь между контролируемыми переменными и входными величинами. Это не только приводит к значительному снижению сложности конструкции, но также позволяет проводить анализ стабильности, несмотря на наличие неизвестных величин, которые в противном случае усложняют его. Результаты моделирования на эталонной системе показывают, что предложенный контроллер хорошо работает как в переходных, так и в установившихся режимах, используя только оценки неизвестных величин.Кроме того, упрощение проектирования и анализа достигается без ущерба для общих динамических характеристик. Наконец, стоит подчеркнуть, что упрощение, достигнутое за счет использования модели пониженного порядка, может быть использовано при анализе более сложных проблем управления скоростью АД, таких как параметрические неопределенности, работа без датчиков, проблемы с временными задержками, отказоустойчивое управление или эффекты насыщения. , назвать несколько. Эти проблемы наряду с экспериментальной проверкой результатов представляют собой интересные будущие направления для этой работы.
Методы управления скоростью асинхронного двигателя
Методы управления скоростью асинхронного двигателя:Единственным способом управления скоростью синхронного двигателя является управление входной частотой и напряжением, чтобы поддерживать постоянное значение V/f. С другой стороны, регулятором скорости асинхронного двигателя можно управлять с помощью следующих средств:
- Контроль напряжения статора
- Регулятор частоты
- Противобуксовочная система
Это применимо к небольшим двигателям и к нагрузке вентиляторного типа, когда крутящий момент нагрузки увеличивается с увеличением скорости. Как уже упоминалось ранее, существует два способа управления действующим значением напряжения статора — фазовое управление и интегральное управление циклом.
Моментно-скоростная характеристика асинхронного двигателя с регулированием напряжения статора представлена на рис. 11.37. Максимальный крутящий момент уменьшается пропорционально квадрату напряжения.
На рисунке также показано, что регулирование скорости возможно только для нагрузки, крутящий момент которой уменьшается со скоростью.Даже тогда регулирование скорости не достигается для малых скоростей — здесь скорость резко падает.
2. Регулятор частоты:Здесь входная частота изменяется с помощью инвертора; для субнормальной частоты напряжение статора также изменяется, чтобы поддерживать постоянное значение V / f, что поддерживает результирующий поток / полюс в воздушном зазоре. Типичная система управления, использующая частотное управление, схематически показана на рис. 11.38. Из-за больших капиталовложений эта система оправдана только для приводов, в которых существенны прочные, не требующие обслуживания характеристики асинхронного двигателя.В противном случае двигатель постоянного тока с преобразователем частоты является логичной и дешевой альтернативой. Сердцем схемы частотного регулирования является трехфазный тиристорный инвертор.
Характеристики крутящий момент-скорость при управлении с переменной частотой и постоянной V/f показаны на рис. 11.39. Можно видеть, что максимальный крутящий момент не меняется, потому что поток/полюс поддерживается на фиксированном уровне.
3. Противобуксовочная система:Уже известно, что подсинхронное управление скоростью асинхронного двигателя возможно путем введения переменного сопротивления в цепь ротора асинхронного двигателя с фазным ротором.Этот метод обеспечивает широкий диапазон скоростей и хороший пусковой момент, как показано на рис.