Видимость дороги: Видимость дороги — Словарь терминов
Обеспечение видимости на автомобильных дорогах — Студопедия
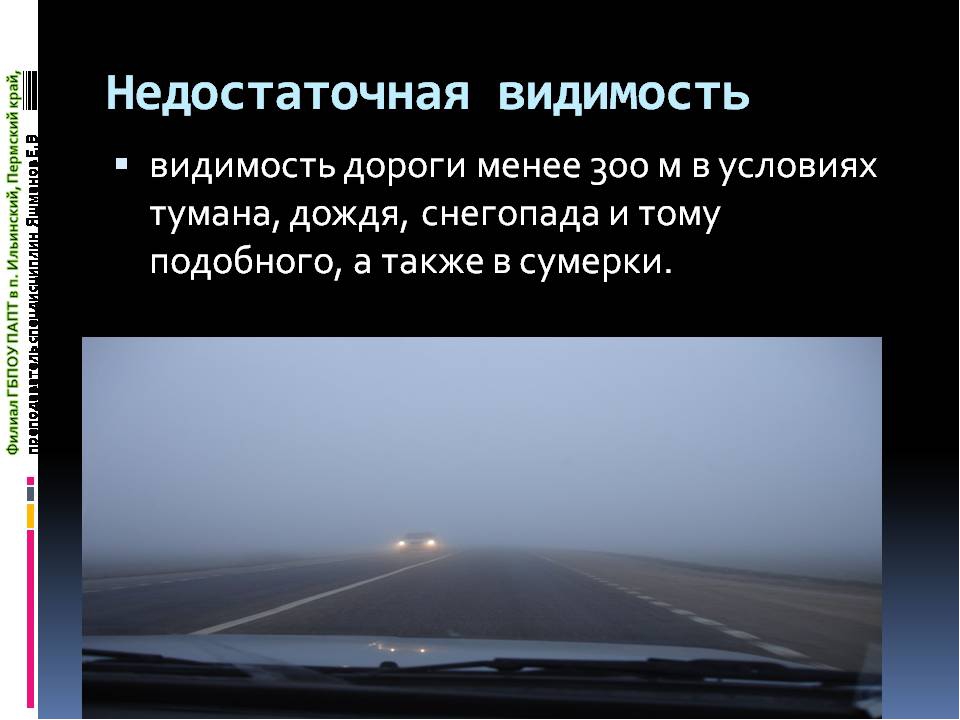
Обеспеченная видимость на дороге является важнейшим показателем ее транспортно-эксплуатационных качеств и безопасности движения. Для безопасности движения на дороге водитель должен видеть перед собой участок достаточной длины, с тем чтобы, заметив препятствие, принять меры к своевременному торможению. Необходимое расстояние видимости устанавливают из условия полной остановки автомобиля, движущегося с расчетной скоростью, перед препятствием.
На дорогах без разделительной полосы при возможности встречного движения по одной полосе расстояние видимости удваивается.
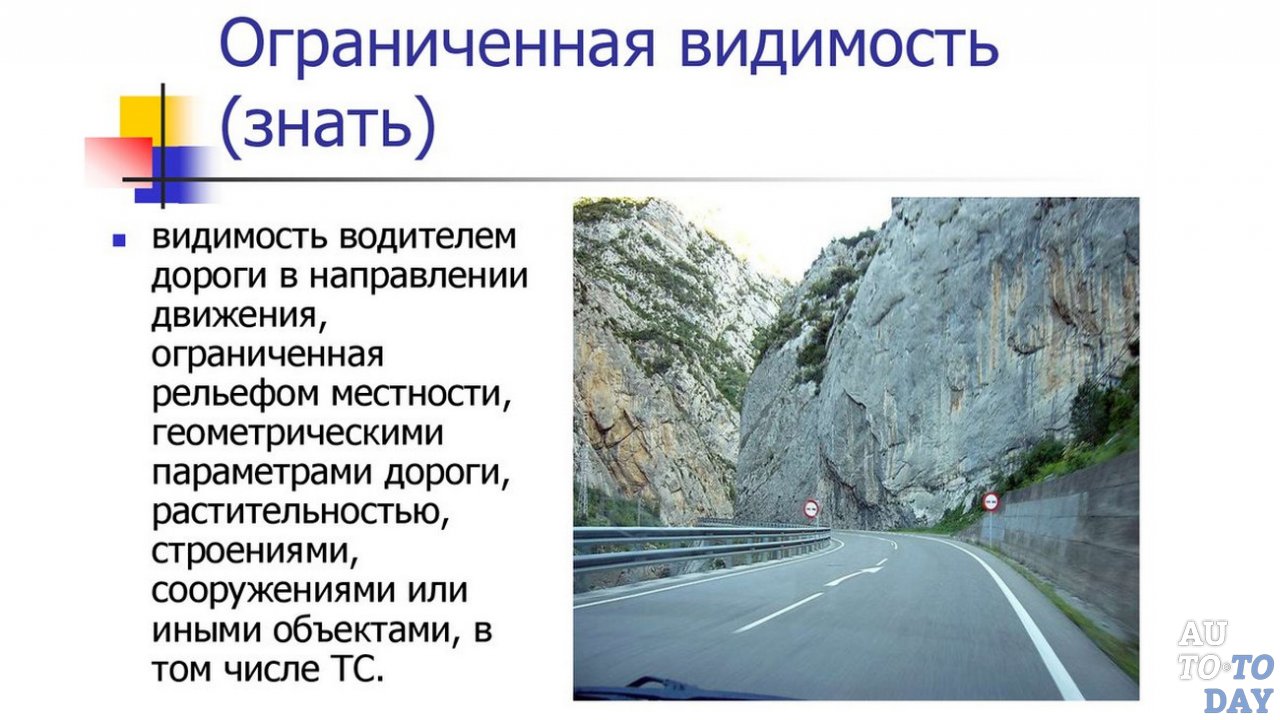
На кривых малых радиусов в плане надлежащая видимость может быть обеспечена путем срезки откосов, вырубки деревьев и кустарников, сноса заборов и строений с внутренней стороны. Для определения границы видимости внутри кривой и зоны, требующей расчистки или срезки грунта, обычно применяют графический метод .
Если траекторию движения автомобиля разбить на отрезки, кратные расстоянию видимости, а затем провести прямые, соединяющие концы участков расстояния видимости по кривой, то кривая (парабола), проведенная через точки пересечения прямых лучей с внутренней стороны кривой, будет границей видимости.
Срезка должна начинаться на расстоянии видимости от начала или конца кривой. По условиям обеспечения боковой видимости и требуемого режима движения не разрешается посадка деревьев ближе 5 м от кромки проезжей части. Телеграфные столбы, мачты освещения и линия электропередач располагают не ближе 2,5 м.
По данным наблюдений за режимами движения и статистики дорожно-транспортных происшествий количество происшествий и относительное снижение скорости движения на кривых в плане и профиле зависят от обеспечения видимости. При равной величине видимости количество происшествий на участках вертикальных кривых примерно в 2 раза выше, чем на горизонтальных кривых.
Это указывает на необходимость повышенного внимания к вопросу обеспечения видимости при проектировании продольного профиля.
В продольном профиле потеря видимости возможна на выпуклых переломах.
При заданных условиях (высота глаза водителя d\, высота препятствия d2 и расчетное расстояние видимости Si) можно определить величину перелома, при которой требуется смягчение для обеспечения видимости.
Наиболее высокая пропускная способность дорог и безопасность движения обеспечиваются при расстоянии видимости не менее 700 м.
При видимости встречного автомобиля в продольном профиле менее 300—350 м, а в плане — 250 м безопасность движения из условия торможения автомобиля перед препятствием не обеспечивается.
На существующих дорогах III—V категорий с необеспеченной видимостью в продольном профиле для создания условий разъезда встречных автомобилей при ремонте или реконструкции дороги выполняют следующие мероприятия:
при интенсивности движения менее 500 авт./сут в пределах всей вертикальной выпуклой кривой малого радиуса уширяют полосу движения в каждом направлении на 1 м, укрепляют обочины на 1,5 м и наносят осевую разметку;
при интенсивности более 500 авт. /сут устраивают разделительный островок шириной не менее 1 м в пределах вертикальной кривой;
/сут устраивают разделительный островок шириной не менее 1 м в пределах вертикальной кривой;
при достаточном технико-экономическом обосновании увеличивают радиус вертикальной кривой.
В трудных условиях, когда невозможно осуществить указанные рекомендации, для удобства выполнения обгонов через каждые 3—4 км устраивают обгонные участки.
Движение в этом случае регулируется разметкой проезжей части и установкой знаков.
| |
| |
| |
| |
| |
| |
| |
| |
| |
| |
|
 1.
1. 1 Автомагистраль из Приложения 1 к ПДД — Правилам дорожного движения обозначает главную дорогу
Дорога, обозначенная знаком 5.1 Автомагистраль и имеющая для каждого направления движения проезжие части, отделенные друг от друга разделительной полосой, а при ее отсутствии — дорожным ограждением, без пересечений в одном уровне с другими дорогами, железнодорожными или трамвайными путями, пешеходными или велосипедными дорожками. Здесь и далее приводится нумерация дорожных знаков согласно Приложению 1 к ПДД — Правилам дорожного движения.
1 Автомагистраль из Приложения 1 к ПДД — Правилам дорожного движения обозначает главную дорогу
Дорога, обозначенная знаком 5.1 Автомагистраль и имеющая для каждого направления движения проезжие части, отделенные друг от друга разделительной полосой, а при ее отсутствии — дорожным ограждением, без пересечений в одном уровне с другими дорогами, железнодорожными или трамвайными путями, пешеходными или велосипедными дорожками. Здесь и далее приводится нумерация дорожных знаков согласно Приложению 1 к ПДД — Правилам дорожного движения. 3.2 Примыкание второстепенной дороги справа из Приложения 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет, если нет светофораДорожный знак 2.3.3 Примыкание второстепенной дороги слева обозначает по ПДД не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет, если нет светофораДорожный знак 2.3.4 Примыкание второстепенной дороги справа предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет по ПДД, если нет светофораДорожный знак 2.3.5 Примыкание второстепенной дороги слева, Прил. 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет по Правилам дорожного движения, если нет светофораДорожный знак 2.3.6 Примыкание второстепенной дороги справа, Приложение 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и Правила дорожного движения наделяют вас правом приоритетного проезда данного перекрёстка, при отсутствии светофораДорожный знак 2.
3.2 Примыкание второстепенной дороги справа из Приложения 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет, если нет светофораДорожный знак 2.3.3 Примыкание второстепенной дороги слева обозначает по ПДД не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет, если нет светофораДорожный знак 2.3.4 Примыкание второстепенной дороги справа предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет по ПДД, если нет светофораДорожный знак 2.3.5 Примыкание второстепенной дороги слева, Прил. 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и имеете приоритет по Правилам дорожного движения, если нет светофораДорожный знак 2.3.6 Примыкание второстепенной дороги справа, Приложение 1 к ПДД предупреждает не только о примыкании, но и о том, что вы движетесь по главной дороге и Правила дорожного движения наделяют вас правом приоритетного проезда данного перекрёстка, при отсутствии светофораДорожный знак 2.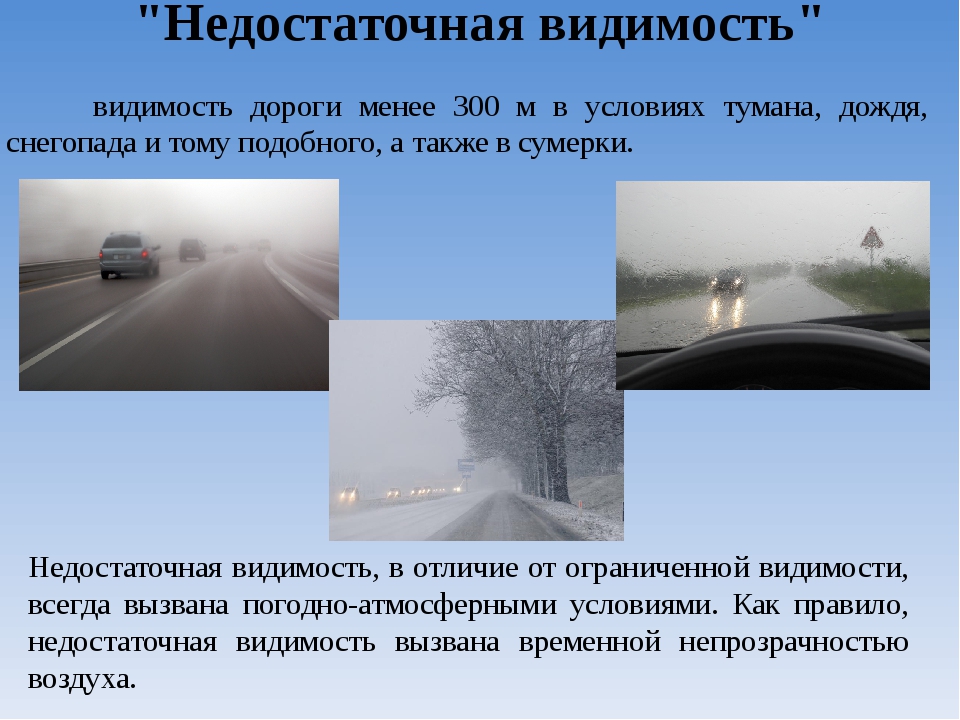


 К островку безопасности может относиться часть разделительной полосы, через которую проложен пешеходный переход.
К островку безопасности может относиться часть разделительной полосы, через которую проложен пешеходный переход. 2.1 либо 1.2.2, используемый для движения, остановки и стоянки в соответствии с Правилами дорожного движения.
2.1 либо 1.2.2, используемый для движения, остановки и стоянки в соответствии с Правилами дорожного движения. 24.2 Конец населенного пункта c перечёркнутым силуэтом зданий из Приложения 1 к ПДД — Правилам дорожного движенияДорожный знак 5.25 Начало населенного пункта с синим фоном из Приложения 1 к ПДД — Правилам дорожного движенияДорожный знак 5.26 Конец населенного пункта с перечёркиванием и синим фоном из Приложения 1 к ПДД — Правилам дорожного движения
24.2 Конец населенного пункта c перечёркнутым силуэтом зданий из Приложения 1 к ПДД — Правилам дорожного движенияДорожный знак 5.25 Начало населенного пункта с синим фоном из Приложения 1 к ПДД — Правилам дорожного движенияДорожный знак 5.26 Конец населенного пункта с перечёркиванием и синим фоном из Приложения 1 к ПДД — Правилам дорожного движения К водителю приравнивается обучающий вождению.
К водителю приравнивается обучающий вождению.
 На автомобили намекают, как на некие механические транспортные средства.
На автомобили намекают, как на некие механические транспортные средства. см, или электродвигатель номинальной максимальной мощностью в режиме длительной нагрузки более 0,25 кВт и менее 4 кВт. К мопедам приравниваются квадрициклы, имеющие аналогичные технические характеристики.
см, или электродвигатель номинальной максимальной мощностью в режиме длительной нагрузки более 0,25 кВт и менее 4 кВт. К мопедам приравниваются квадрициклы, имеющие аналогичные технические характеристики.
 Правила проезда регулируемых и нерегулируемых перекрёстков описаны в разделе 13, их знание проверяют на экзамене.
Правила проезда регулируемых и нерегулируемых перекрёстков описаны в разделе 13, их знание проверяют на экзамене. 19.1 Пешеходный переход из Приложения 1 к ПДД — Правилам дорожного движенияДорожная разметка 1.14.1 Пешеходный переход Зебра из Приложения 2 к ПДД — Правилам дорожного движенияДорожная разметка 1.14.2 Пешеходный переход Зебра со стрелками из Приложения 2 к ПДД — Правилам дорожного движения
19.1 Пешеходный переход из Приложения 1 к ПДД — Правилам дорожного движенияДорожная разметка 1.14.1 Пешеходный переход Зебра из Приложения 2 к ПДД — Правилам дорожного движенияДорожная разметка 1.14.2 Пешеходный переход Зебра со стрелками из Приложения 2 к ПДД — Правилам дорожного движения 2.
2.
 Иначе, остановка станет называться стоянкой.
Иначе, остановка станет называться стоянкой. Включайте противотуманные фары, дневные ходовые огни, дальний или ближний свет фар.
Включайте противотуманные фары, дневные ходовые огни, дальний или ближний свет фар. Перевозка группы детей. Транспортная колонна.
Перевозка группы детей. Транспортная колонна. Штраф ГИБДД за порчу и загрязнение дорог
Штраф ГИБДД за порчу и загрязнение дорог Лицо, создавшее помеху, обязано принять все возможные меры для ее устранения, а если это невозможно, то доступными средствами обеспечить информирование участников движения об опасности и сообщить в полицию.
Лицо, создавшее помеху, обязано принять все возможные меры для ее устранения, а если это невозможно, то доступными средствами обеспечить информирование участников движения об опасности и сообщить в полицию.7.2. Обеспечение видимости дороги
7.2.1.
Обеспеченная на дороге видимость
является важнейшим показателем ее
транспортно-эксплуатационных качеств
и безопасности движения. Фактические
расстояния видимости на кривых в плане
и в продольном профиле определяют
скорости движения, которые при
недостаточной видимости существенно
снижаются по сравнению со скоростями,
обеспечиваемыми радиусами кривых и
коэффициентами сцепления дорожных
покрытий. При равных значениях видимости
количество ДТП на участках вертикальных
кривых примерно в 2 раза выше, чем на
кривых в плане, что указывает на
необходимость повышенного внимания к
обеспечению видимости при проектировании
продольного профиля.
При равных значениях видимости
количество ДТП на участках вертикальных
кривых примерно в 2 раза выше, чем на
кривых в плане, что указывает на
необходимость повышенного внимания к
обеспечению видимости при проектировании
продольного профиля.
7.2.2. Рекомендуется, учитывая условия местности, принимать расстояния видимости поверхности дороги не менее 450 м. Отход от этого требования возможен лишь при наличии экономического обоснования. Минимальное расстояние видимости не должно быть меньше расстояний, установленных действующими стандартами и нормами.
7.2.3.
Минимальное расстояние видимости
поверхности дороги рассчитано на время
реакции водителя 1,0 с. Повсеместно
применение этого норматива приводит к
созданию сложных дорожных условий:
затрудняется или становится невозможным
обгон, увеличивается напряженность
работы водителя, возрастает вероятность
ДТП. При реконструкции, капитальном
ремонте, и особенно при проектировании
новых дорог, рекомендуется везде, где
это возможно, обеспечивать расстояние
видимости поверхности дороги из условия
времени реакции водителя: для дорог I
категории 2,5 с, для дорог II и III категорий
2,0 с и для дорог IV и V категорий 1,5 с. Рекомендуемые расстояния видимости
при расчете вертикальных кривых и срезок
видимости на кривых в плане приведены
в табл.7.1.
Рекомендуемые расстояния видимости
при расчете вертикальных кривых и срезок
видимости на кривых в плане приведены
в табл.7.1.
Таблица 7.1
Условия применения | Расстояние видимости, м, при скорости движения, км/ч | |||
80 | 100 | 120 | 140 | |
В исключительных условиях (минимальное расстояние видимости) | 100 | 140 | 175 | 225 |
В сложных условиях рельефа | 110 | 170 | 200 | 300 |
Допустимое ограничение видимости (не чаще 1 раза на 2 км) из условия обеспечения зрительной ясности дороги | 250 | 280 | 340 | 430 |
7. 2.4.
Расстояние видимости в продольном
профиле обеспечивается благодаря
вписыванию вертикальных выпуклых
кривых. Рекомендуемые радиусы их
приведены в табл.7.2.
2.4.
Расстояние видимости в продольном
профиле обеспечивается благодаря
вписыванию вертикальных выпуклых
кривых. Рекомендуемые радиусы их
приведены в табл.7.2.
Таблица 7.2
Условия применения | Минимальные радиусы выпуклых вертикальных кривых, м, при расчетной скорости движения, км/ч | |||
80 | 100 | 120 | 140 | |
Минимально допустимые в сложных условиях (расчетное время реакции водителя 1,0 с) | 5000 | 10000 | 15000 | 27000 |
Рекомендуемые (расчетное время реакции водителя 2,0 с) | 10000 | 20000 | 30000 | 45000* |
________________
*
Из условия расчетного времени реакции
водителя 2,5 с.
7.2.5. Построение линейного графика видимости является обязательным при разработке мероприятий по повышению безопасности движения и пропускной способности дороги. Участки с недостаточной видимостью необходимо перестраивать в первую очередь.
7.2.6. В трудных условиях холмистого рельефа, когда невозможно выполнить рекомендации пп.7.2.3 и 7.2.4 на всем протяжении дороги, для осуществления обгонов необходимо не реже чем через 3-4 км устраивать на прямых и кривых больших радиусов специальные обгонные участки с обеспеченной видимостью. Минимальную длину обгонного участка принимают в зависимости от расчетной скорости движения на подходах к этому участку, обеспечиваемой геометрическими элементами.
Расчетная скорость, км/ч | 120 | 100 | 80 | 60 | 50 | 40 | 30 |
Длина обгонного участка, км | 2,0-2,5 | 1,5-1,7 | 1,0-1,1 | 0,75 | 0,60 | 0,50 | 0,40 |
3. 4. Видимость дороги «ВЕДОМСТВЕННЫЕ СТРОИТЕЛЬНЫЕ НОРМЫ. УКАЗАНИЯ ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ. ВСН 25-86» (утв. Минавтодором РСФСР от 29.01.86)
4. Видимость дороги «ВЕДОМСТВЕННЫЕ СТРОИТЕЛЬНЫЕ НОРМЫ. УКАЗАНИЯ ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ. ВСН 25-86» (утв. Минавтодором РСФСР от 29.01.86)
действует
Редакция от 01.01.1970 Подробная информация 4. Видимость дороги «ВЕДОМСТВЕННЫЕ СТРОИТЕЛЬНЫЕ НОРМЫ. УКАЗАНИЯ ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ. ВСН 25-86» (утв. Минавтодором РСФСР от 29.01.86)
4. Видимость дороги «ВЕДОМСТВЕННЫЕ СТРОИТЕЛЬНЫЕ НОРМЫ. УКАЗАНИЯ ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ. ВСН 25-86» (утв. Минавтодором РСФСР от 29.01.86)| Наименование документ | «ВЕДОМСТВЕННЫЕ СТРОИТЕЛЬНЫЕ НОРМЫ. УКАЗАНИЯ ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ДВИЖЕНИЯ НА АВТОМОБИЛЬНЫХ ДОРОГАХ. ВСН 25-86» (утв. Минавтодором РСФСР от 29.01.86) |
| Вид документа | приказ, правила |
| Принявший орган | минавтодор рсфср |
| Номер документа | ВСН 25-86 |
| Дата принятия | 01.01.1970 |
| Дата редакции | 01.01.1970 |
| Дата регистрации в Минюсте | 01.01.1970 |
| Статус | действует |
| Публикация |
|
| Навигатор | Примечания |
3.4. Видимость дороги
3. 4.1. Обеспеченная на дороге видимость является важнейшим показателем ее транспортно-эксплуатационных качеств и безопасности движения. Фактическое расстояние видимости на кривых в плане и в продольном профиле определяет скорости движения, которые при недостаточной видимости существенно снижаются по сравнению со скоростями, обеспечиваемыми радиусами кривых и коэффициентами сцепления дорожных покрытий. При равных значениях видимости количество ДТП на участках вертикальных кривых примерно в 2 раза выше, чем на кривых в плане, что указывает на необходимость повышенного внимания к обеспечению видимости при проектировании продольного профиля.
4.1. Обеспеченная на дороге видимость является важнейшим показателем ее транспортно-эксплуатационных качеств и безопасности движения. Фактическое расстояние видимости на кривых в плане и в продольном профиле определяет скорости движения, которые при недостаточной видимости существенно снижаются по сравнению со скоростями, обеспечиваемыми радиусами кривых и коэффициентами сцепления дорожных покрытий. При равных значениях видимости количество ДТП на участках вертикальных кривых примерно в 2 раза выше, чем на кривых в плане, что указывает на необходимость повышенного внимания к обеспечению видимости при проектировании продольного профиля.
3.4.2. СНиП 2.02.05-85 рекомендует, учитывая условия местности, принимать расстояния видимости поверхности дороги не менее 450 м. Отход от этого требования возможен лишь при наличии экономического обоснования.
3.4.3. Минимальное расстояние видимости поверхности дороги в исключительных случаях (сложный рельеф, препятствия для трассирования дороги в плане, близость жилой застройки) нормируется СНиП 2. 05.02-85. Это расстояние видимости рассчитано на время реакции водителя 1,0 с. Повсеместно применение этого норматива приводит к образованию сложных дорожных условий: затрудняется или становится невозможным обгон, увеличивается напряженность работы водителя, возрастает вероятность ДТП.
05.02-85. Это расстояние видимости рассчитано на время реакции водителя 1,0 с. Повсеместно применение этого норматива приводит к образованию сложных дорожных условий: затрудняется или становится невозможным обгон, увеличивается напряженность работы водителя, возрастает вероятность ДТП.
При реконструкции, капитальном ремонте и особенно при проектировании новых дорог рекомендуется везде, где это возможно, не нарушая требований СНиП, обеспечивать расстояние видимости поверхности дороги из условия времени реакции водителя для дорог I категории 2,5 с, для дорог II и III категории 2,0 с и для дорог IV и V категории 1,5 с. Рекомендуемые расстояния видимости при расчете вертикальных кривых и срезок видимости на кривых в плане приведены в табл. 3.4.
Таблица 3.4
| Условия применения | Расстояние видимости, м, при скорости движения, км/ч | |||
| 80 | 100 | 120 | 150 | |
| О исключительных условиях (минимальное расстояние видимости) | 100 | 140 | 175 | 225 |
| В сложных условиях рельефа | 110 | 170 | 200 | 300 |
| Допустимое ограничение видимости (не чаще 1 раза на 2 км) из условия обеспечения зрительной ясности дороги | 250 | 280 | 340 | 430 |
Расстояние видимости в продольном профиле обеспечивается благодаря вписыванию вертикальных выпуклых кривых. Рекомендуемые радиусы их приведены в табл. 3.5.
Рекомендуемые радиусы их приведены в табл. 3.5.
Таблица 3.5
| Условия применения | Минимальные радиусы выпуклых вертикальных кривых, м, при расчетной скорости движения, км/ч | |||
| 80 | 100 | 120 | 150 | |
| В сложных условиях (расчетное время реакции водителя 1,0 с) | 5000 | 10000 | 15000 | 27000 |
| В нормальных условиях (расчетное время реакции водителя 2,0 с) | 10000 | 20000 | 30000 | 45000 <*> |
<*> Из условия расчетного времени реакции водителя 2,5 с.![]()
3.4.4. Построение линейного графика видимости на дороге является обязательным при разработке мероприятий по повышению безопасности движения и пропускной способности дороги. Участки с недостаточной видимостью дороги необходимо перестраивать в первую очередь. До перестройки на них предусматривают мероприятия по четкой организации движения и обеспечению его безопасности.
3.4.5. На участках дорог III-V категорий с недостаточной видимостью в продольном профиле для улучшения условий разъезда и предотвращения столкновений встречных автомобилей могут применяться следующие мероприятия:
а) при интенсивности движения менее 500 авт./сут в пределах всей вертикальной выпуклой кривой малого радиуса уширение полосы движения в каждом направлении на 1 м за счет обочин, укрепление остающейся части обочин, нанесение разметки проезжей части;
б) при интенсивности более 500 авт./сут в пределах вертикальной кривой устройство разделительного островка шириной не менее 1 м;
в) увеличение радиуса вертикальной кривой.
Указанные мероприятия можно выполнять поэтапно, по мере возрастания интенсивности движения.
3.4.6. В трудных условиях холмистого рельефа, когда невозможно осуществить рекомендации пп. 3.4.3 и 3.4.4 на всем протяжении дороги, для осуществления обгонов необходимо не реже чем через 3-4 км устраивать на прямых и кривых больших радиусов специальные обгонные участки с обеспеченной видимостью. Минимальную длину обгонного участка принимают в зависимости от расчетной скорости движения на подходах к этому участку, обеспечиваемой геометрическими элементами:
| Расчетная скорость, км/ч | 120 | 100 | 80 | 60 | 50 | 40 | 30 |
| Длина обгонного участка | 2,0-2,5 | 1,5-1,7 | 1,0-1,1 | 0,75 | 0,60 | 0,50 | 0,40 |
Исследование классификации видимости дорожного движения на основе характеристик поведения вождения — эксперимент на симуляторе вождения
Издательство
:Emerald Publishing Limited
Авторские права © 2020, Кун Ван, Вэйхуа Чжан, Чжунсян Фэн и Ченг Ван.
Лицензия
Опубликовано в журнале Journal of Intelligent and Connected Vehicles . Издано Emerald Publishing Limited. Эта статья опубликована под лицензией Creative Commons Attribution (CC BY 4.0) лицензия. Кто угодно может воспроизводить, распространять, переводить и создавать производные работы из этой статьи (как для коммерческих, так и для некоммерческих целей) при условии полной ссылки на оригинальную публикацию и авторов. Полные условия этой лицензии можно увидеть на http://creativecommons.org/licences/by/4.0/legalcode
.1. Введение
Неблагоприятные погодные условия наносят серьезный ущерб безопасности дорожного движения, особенно в условиях плохой видимости из-за тумана. Предыдущие исследования показали, что дорожно-транспортные происшествия с большей вероятностью происходят в условиях плохой видимости, и большинство из них являются вторичными авариями или столкновениями нескольких транспортных средств в условиях плохой видимости, что приводит к более серьезным последствиям (Abdel-Aty et al. , 2011 г .; Wang et al. , 2017). Условия плохой видимости серьезно влияют на линию обзора водителей, что приводит к отсутствию точной оценки информации о геометрии дороги и состоянии транспортного потока в реальном времени (Clark et al. , 2004; Li et al. , 2015). Статистика показывает, что ежегодно в авариях, связанных с туманом, происходит около 600 смертей и 16 300 травм (Министерство транспорта США, 2009). И ситуация с безопасностью движения в условиях плохой видимости в Китае тоже очень серьезная.Согласно Ежегодному отчету статистики дорожно-транспортных происшествий Китая, в 2015 году в Китае произошло 106047 дорожно-транспортных происшествий при видимости ниже 200 м, в результате чего погибло 34 006 человек, что составляет 58,61% всех смертей в ДТП (CRTASR, 2011). В условиях серьезной ситуации с безопасностью точная классификация видимости дорожного движения имеет жизненно важное значение для установления более точных мер контроля и обеспечения безопасности дорожного движения в условиях плохой видимости.
, 2011 г .; Wang et al. , 2017). Условия плохой видимости серьезно влияют на линию обзора водителей, что приводит к отсутствию точной оценки информации о геометрии дороги и состоянии транспортного потока в реальном времени (Clark et al. , 2004; Li et al. , 2015). Статистика показывает, что ежегодно в авариях, связанных с туманом, происходит около 600 смертей и 16 300 травм (Министерство транспорта США, 2009). И ситуация с безопасностью движения в условиях плохой видимости в Китае тоже очень серьезная.Согласно Ежегодному отчету статистики дорожно-транспортных происшествий Китая, в 2015 году в Китае произошло 106047 дорожно-транспортных происшествий при видимости ниже 200 м, в результате чего погибло 34 006 человек, что составляет 58,61% всех смертей в ДТП (CRTASR, 2011). В условиях серьезной ситуации с безопасностью точная классификация видимости дорожного движения имеет жизненно важное значение для установления более точных мер контроля и обеспечения безопасности дорожного движения в условиях плохой видимости.
Наиболее очевидным фактором, влияющим на поведение водителей при плохой видимости, является скорость.Водители будут активно снижать скорость движения, чтобы снизить риск при движении в тумане (Ян и др. , 2014 г .; Хамдар и др. , 2016 г.). Wu et al. (2018) обнаружил существенные различия в скорости в разных условиях видимости. Чен и др. (2013) предложил нелинейную зависимость между скоростью транспортного средства и видимостью. Уменьшение видимости приводит к тенденции сначала к увеличению, а затем к снижению скорости, а максимальная скорость достигается при видимости 80 м. Brooks et al. (2011) обнаружил, что водители начали снижать скорость, когда расстояние видимости было ниже 70 м, но их скорость оставалась высокой. Zhu et al. (2010) также обнаружил, что в определенном диапазоне скорость транспортного средства снижалась примерно на 15% на каждые 50 м уменьшения видимости.
Кроме того, характеристики положения полосы движения также используются для изучения поведения водителей при боковом движении. Zhao et al. (2015) использовал контроль скорости водителей и положение полосы движения в качестве переменных наблюдения, чтобы изучить влияние наличия шевронного знака совмещения на поведение водителей при вождении на участке кривой.Чен и др. (2013) и Brooks et al. (2011) исследовала способность водителей удерживать полосу движения в различных условиях видимости. Результаты показали, что способность водителей удерживать полосу движения будет значительно снижена при видимости дороги менее 30 м.
Zhao et al. (2015) использовал контроль скорости водителей и положение полосы движения в качестве переменных наблюдения, чтобы изучить влияние наличия шевронного знака совмещения на поведение водителей при вождении на участке кривой.Чен и др. (2013) и Brooks et al. (2011) исследовала способность водителей удерживать полосу движения в различных условиях видимости. Результаты показали, что способность водителей удерживать полосу движения будет значительно снижена при видимости дороги менее 30 м.
Хотя поведение при вождении и меры контроля в различных условиях видимости были тщательно изучены, классификация условий видимости в основном основана на соответствующих стандартах и существующих исследованиях.А отсутствие специальных исследований по классификации видимости делает эффект реализации мер контроля неспособным достичь оптимального, что приводит к нерациональной трате ресурсов дороги. Таким образом, мы провели эксперимент на симуляторе вождения, чтобы изучить разницу в управлении скоростью и удержании полосы движения в разных условиях видимости на прямом и изогнутом участках. Условия видимости дорожного движения будут оцениваться точно. Результаты этого подхода имеют важное научное значение и практическую ценность для обеспечения безопасности дорожного движения и повышения эффективности эксплуатации дорог.
Условия видимости дорожного движения будут оцениваться точно. Результаты этого подхода имеют важное научное значение и практическую ценность для обеспечения безопасности дорожного движения и повышения эффективности эксплуатации дорог.
2. Метод
2.1 Субъекты
В этой статье использовалось 17 (условия видимости) × 2 (участки дороги) экспериментального плана повторных измерений. Для этого исследования было привлечено 25 аспирантов Технологического университета Хэфэй. Каждый участник имел действующие китайские водительские права и стаж вождения не менее двух лет. Из 25 участников 6 были исключены из-за болезни симулятора вождения и были отобраны 19 экспериментальных участников, в том числе 4 женщины-водителя.Возраст участников был от 21 до 28 лет (среднее значение = 24,2, стандартное отклонение = 1,9).
2.2 Аппарат
Эксперимент по моделированию вождения может эффективно избежать риска для безопасности водителя при вождении в действительно туманной среде. Симулятор вождения использовался для загрузки сцен с различными условиями видимости, и можно было получить данные о поведении водителей при вождении в этих условиях. Симулятор вождения Технологического университета Хэфэй использовался для проведения эксперимента и сбора данных, как показано на Рисунке 1.Пульт управления был сконфигурирован для небольшого автомобиля, включая полную приборную панель (спидометр, тахометр, индикатор), комбинированный переключатель, переключатель рулевого управления, механизм переключения передач и кнопку пользовательского интерфейса, в соответствии с реальной конструкцией автомобиля в масштабе 1: 1. Система отображения состояла из трех 43-дюймовых экранов с разрешением 1920 × 1080 пикселей, которые обеспечивали поле обзора 150 градусов по горизонтали и 28 градусов по вертикали. Тормоз, акселератор и направление движения транспортного средства были разработаны с учетом реальной ситуации, а приборная панель и зеркало заднего вида отображали информацию о скорости транспортного средства в реальном времени и окружающих визуальных условиях движения.
Симулятор вождения использовался для загрузки сцен с различными условиями видимости, и можно было получить данные о поведении водителей при вождении в этих условиях. Симулятор вождения Технологического университета Хэфэй использовался для проведения эксперимента и сбора данных, как показано на Рисунке 1.Пульт управления был сконфигурирован для небольшого автомобиля, включая полную приборную панель (спидометр, тахометр, индикатор), комбинированный переключатель, переключатель рулевого управления, механизм переключения передач и кнопку пользовательского интерфейса, в соответствии с реальной конструкцией автомобиля в масштабе 1: 1. Система отображения состояла из трех 43-дюймовых экранов с разрешением 1920 × 1080 пикселей, которые обеспечивали поле обзора 150 градусов по горизонтали и 28 градусов по вертикали. Тормоз, акселератор и направление движения транспортного средства были разработаны с учетом реальной ситуации, а приборная панель и зеркало заднего вида отображали информацию о скорости транспортного средства в реальном времени и окружающих визуальных условиях движения. Симулятор также предоставляет программное обеспечение (Scanner Studio 1.6) для разработки сценария вождения, моделирования виртуальной транспортной среды и виртуального моделирования дороги. Симулятор собирал данные о скорости транспортного средства с частотой 100 Гц на протяжении всех экспериментов.
Симулятор также предоставляет программное обеспечение (Scanner Studio 1.6) для разработки сценария вождения, моделирования виртуальной транспортной среды и виртуального моделирования дороги. Симулятор собирал данные о скорости транспортного средства с частотой 100 Гц на протяжении всех экспериментов.
2.3 Сценарии
Сценарий моделировался в дневное время, а экспериментальная сцена включала три смоделированные дороги с одинаковой формой линии. У каждой моделируемой дороги была четырехполосная второстепенная дорога с двумя полосами движения в каждом направлении, отмеченными одиночными белыми краевыми линиями и двойными желтыми осевыми линиями.Длина каждой моделируемой дороги составляла около 8,4 км. Ширина каждой полосы составляла 3,75 м, и водители должны были двигаться со скоростью ниже проектной скорости 80 км / ч. Под видимостью в этом документе понимается среднее расстояние, на котором водитель может увидеть большую черную метку E впереди. Недавние исследования видимости и поведения при вождении были сосредоточены на видимости ниже 200 м. Когда видимость ниже 20 м, водители не могут выполнять обычные операции по вождению, и это может прерывать управление автомобилем (Hawkins, 1988; Brooks et al., 2011). Поэтому диапазон видимости 20-200 м взят в качестве области исследования данной статьи. Первоначальную видимость сцены можно разделить на 17 уровней, которые можно разделить на три группы:
Когда видимость ниже 20 м, водители не могут выполнять обычные операции по вождению, и это может прерывать управление автомобилем (Hawkins, 1988; Brooks et al., 2011). Поэтому диапазон видимости 20-200 м взят в качестве области исследования данной статьи. Первоначальную видимость сцены можно разделить на 17 уровней, которые можно разделить на три группы:
Когда условия видимости находятся между 20 и 50 м, визуальный эффект загружается из зоны видимости 20 м с интервалом 5 м, то есть визуальные эффекты загружаются с видимостью 20, 25, 30, 35 , 40, 45 и 50 м.
Когда условия видимости составляют от 50 до 100 м, визуальный эффект загружается с интервалом 10 м, то есть видимость составляет 60, 70, 80, 90 и 100 м.
Когда условия видимости находятся в диапазоне от 100 до 200 м, визуальный эффект загружается с интервалом в 20 м, то есть видимость составляет 120, 140, 160, 180 и 200 м.
Чтобы получить представление о поведении водителя при вождении в разных условиях видимости, каждая смоделированная дорога разделена на семь сегментов с разными условиями видимости. Каждый основной экспериментальный сегмент имеет длину 1 км и состоит из прямой линии длиной 500 м и извилистой дороги длиной 500 м с радиусом 400 м (рис. 2).Принимая во внимание адаптивный процесс вождения участников, каждый сценарий был разработан таким образом, чтобы начинаться с прямого участка длиной 1000 м. Каждые два экспериментальных участка были разделены прямым переходным участком длиной 200 м. В сцене задано соответствующее количество встречного транспортного потока, но на экспериментальной полосе нет других транспортных средств. При этом, чтобы не мешать экспериментальным данным другие факторы, все дороги горизонтальные.
Каждый основной экспериментальный сегмент имеет длину 1 км и состоит из прямой линии длиной 500 м и извилистой дороги длиной 500 м с радиусом 400 м (рис. 2).Принимая во внимание адаптивный процесс вождения участников, каждый сценарий был разработан таким образом, чтобы начинаться с прямого участка длиной 1000 м. Каждые два экспериментальных участка были разделены прямым переходным участком длиной 200 м. В сцене задано соответствующее количество встречного транспортного потока, но на экспериментальной полосе нет других транспортных средств. При этом, чтобы не мешать экспериментальным данным другие факторы, все дороги горизонтальные.
Чтобы избежать эффекта порядка испытаний, условия видимости были выбраны случайным образом из начальных условий видимости для моделируемых дорог, как показано в таблице I.В то же время, чтобы избежать того факта, что реальные данные не могут быть получены из-за небольшой разницы в видимости между соседними дорогами, видимость соседних экспериментальных участков требуется выбирать случайным образом в разных группах начальной видимости.
2.4 Схема эксперимента и методика
Перед началом эксперимента участникам сначала сказали, что эксперимент будет использоваться только для научных исследований и не причинит вреда обществу или участникам.Если они испытывают дискомфорт во время эксперимента, они могут немедленно прекратить эксперимент, а за эксперимент выплачивается вознаграждение в соответствии с пропорцией времени. Водителю была представлена соответствующая информация симулятора вождения, включая акселератор, тормоз и передачу. Затем водитель провел 5-10 минут адаптивного обучения вождению, требуя от водителя ускорения, замедления, поворота и других действий при вождении. После тренировки водитель вышел из машины и немного отдохнуть.Исследователи спросили, были ли симптомы тошноты или головокружения в процессе вождения; они спрашивали и записывали, есть ли у испытуемых заболевания, влияющие на их нормальное вождение, употребляли ли они наркотики, стимулирующую пищу или алкогольные напитки в последние два дня, и они получили всю основную информацию.
2.4.1 Эксперимент по коррекции видимости
Чтобы избежать отклонения между видимостью симулятора и фактической видимостью дороги, тестировщик должен скорректировать видимость симулятора перед проведением эксперимента по оценке видимости.На основании Спецификаций для приземных метеорологических наблюдений (GB / T 35237-2017) и метода измерения статического зрения в этом документе в качестве целевого объекта была выбрана визирная метка «E» (Национальные стандарты Китайской Народной Республики, 2017 г.) . Прицельная марка «С» имеет большую полость, которая не соответствовала характеристикам целевого объекта в предварительном эксперименте. В соответствии с диапазоном исследования видимости в этой статье, соответствующим пороговому значению размера целевого объекта, чтобы целевой объект адаптировался к различным размерам видимости, 1.В качестве конечной длины стороны целевого объекта выбрано 746 м.
В эксперименте по калибровке видимости начальное разделение видимости было установлено как фактическое расстояние x между точкой наблюдения и целевым объектом «E» в сцене. Затем видимость на симуляторе вождения начнется с 0 и будет увеличиваться один за другим на 1 м. Когда субъекты могут точно различать направление раскрытия целевого объекта «E», соответствующая видимость y в сцене симулятора будет записана.Описанный выше эксперимент повторяли до тех пор, пока x не стали равными 200 м.
Затем видимость на симуляторе вождения начнется с 0 и будет увеличиваться один за другим на 1 м. Когда субъекты могут точно различать направление раскрытия целевого объекта «E», соответствующая видимость y в сцене симулятора будет записана.Описанный выше эксперимент повторяли до тех пор, пока x не стали равными 200 м.
2.4.2 Эксперимент по классификации видимости
Что касается основного движения, исследователи сказали участникам свободно водить машину в соответствии с его / ее обычными привычками вождения в реальных ситуациях, оставаться в первоначальной полосе и соблюдать законы и правила дорожного движения. После завершения эксперимента каждому участнику была выплачена компенсация по 200 йен. Каждого участника попросили подписать «экспериментальное информированное письмо». Испытуемых проинформировали, что им нужно проехать всего три смоделированных сценария, каждый из которых длится около 12 минут, а время отдыха между каждым заданием по вождению составляет 3 минуты.
2,5 Статистический анализ
Описательная статистика была получена для изучения размера выборки и частоты определенных переменных. Для исследования различий в поведении при вождении в разных условиях видимости использовались ANOVA и тест множественного сравнения с наименьшей значимой разницей (LSD). Анализы проводились с использованием статистической программы SPSS (версия 19.0).
3. Результаты
3.1 Результат коррекции видимости
Была установлена связь между фактической видимостью и видимостью симулятора (рисунок 3), а коэффициент корреляции модели был равен 0.9995. Согласно результатам подгонки, видимость симулятора, соответствующая начальной видимости, может быть получена (таблица II), которую можно использовать для корректировки смоделированной видимости в последующих экспериментах.
3.2 Описательная статистика
Характеристики вождения, изученные в эксперименте по классификации видимости, включали скорость и положение полосы движения. Переменная положения полосы движения относится к расстоянию между автомобилем и осевой линией дороги. После того, как неверные данные о превышении скорости и значениях вне дороги были удалены, данные 19 испытуемых были использованы в следующем анализе.В таблице III представлены сводные данные о средней скорости (SP_AVG), стандартном отклонении скорости (SP_SD), среднем положении полосы движения (LP_AVG) и стандартном отклонении положения полосы движения (LP_SD) для каждого участка дороги. Таблица III показывает, что средняя скорость (SP_AVG), очевидно, увеличивалась с улучшением условий видимости, но не было явных тенденций изменения для других переменных.
Переменная положения полосы движения относится к расстоянию между автомобилем и осевой линией дороги. После того, как неверные данные о превышении скорости и значениях вне дороги были удалены, данные 19 испытуемых были использованы в следующем анализе.В таблице III представлены сводные данные о средней скорости (SP_AVG), стандартном отклонении скорости (SP_SD), среднем положении полосы движения (LP_AVG) и стандартном отклонении положения полосы движения (LP_SD) для каждого участка дороги. Таблица III показывает, что средняя скорость (SP_AVG), очевидно, увеличивалась с улучшением условий видимости, но не было явных тенденций изменения для других переменных.
3.3 Анализ ANOVA
Однородность дисперсии должна быть проверена перед ANOVA, и результаты показали, что все SP_AVG, SP_SD, LP_AVG и LP_SD для прямого и изогнутого сегментов прошли тест на однородность дисперсии ( p > 0.05). Результаты ANOVA показали, что только средняя скорость прямой и извилистой дороги имеет существенное различие в разных условиях видимости.
Поскольку видимость (20 м) была установлена в качестве эталонной категории, мы по порядку выяснили, есть ли существенные различия в средней скорости между эталонными условиями видимости и другими условиями видимости (более 20 м). Таблица IV показывает, что нет значительных различий в средней скорости между исходным условием видимости (20 м) и двумя следующими условиями видимости (25 м и 30 м).Но разница в средней скорости существовала между исходным условием видимости (20 м) и условием видимости (более 35 м). Средняя скорость в условиях видимости (более 35 м) была значительно выше, чем в условиях эталонной видимости (20 м). В это время условие видимости (35 м) определяется как критическая точка видимости, а видимость (35 м) использовалась в качестве ориентира. Вышеуказанные анализы были повторены, и другие критические точки видимости на прямом участке составляли 60 м и 140 м.Наконец, условия видимости на прямом участке разделены на пять уровней: менее 20, 20-30, 35-60, 60-140 и более 140 м.
Множественные сравнения влияния условий видимости на среднюю скорость на криволинейном участке были проанализированы аналогичным образом. В таблице V показано, что условия видимости на криволинейном участке разделены на четыре уровня: менее 20, 20–30, 35–60 и более 60 м. Из-за ограниченного объема статьи в таблицах IV и V показаны только частичные результаты анализа.
Рисунок 4 показывает, что чем выше видимость у strai
Обзор: Седельная сумка Ortlieb High Visibility
Если вам нравится большая сумка-седло для длительных поездок, то определенно стоит подумать о сумке-седле Ortlieb High Visibility объемом 2,7 л. , особенно если вы будете кататься ночью.
Сумка изготовлена из водонепроницаемой ткани Cordura с полиуретановым покрытием и покрыта световозвращающей пряжей. Это придает ему пятнистый вид при дневном свете, но после наступления темноты он действительно светится в автомобильных фарах, и вы можете видеть его как сбоку, так и сзади.
Найдите ближайшего к вам дилера
Купить онлайн здесь
Внутри нет никакой организации, это просто большое пространство: достаточно большое для пары запасных трубок, некоторых инструментов, дождевика и некоторых закусок. Если вы не наполняете его так, как это, то закрывающаяся крышка позволяет вам упаковать его немного меньше. Это закрытие также сохраняет все сухим; Ортлиб оценил его как IP64 (пыленепроницаемый и брызгозащищенный), но при использовании я никогда не обнаруживал внутри воды.
В подседельной сумке используется быстросъемная пластина для крепления к седлу, а ремешок на липучке обходит подседельный штырь, чтобы удерживать его в устойчивом положении.Если вы проделаете седло далеко вперед на подседельном штыре, вам может быть сложно установить крепление на рельсах, так что имейте это в виду, если это ваша установка. После того, как крепление установлено на место, потребуется пять секунд, чтобы снять или заменить сумку, и она остается на месте, очень мало перемещаясь даже по неровной дороге. Если крепление вам не подходит, есть также набор ремней, которые можно приобрести отдельно, так что вы можете зафиксировать сумку на месте в более традиционном стиле.
Если крепление вам не подходит, есть также набор ремней, которые можно приобрести отдельно, так что вы можете зафиксировать сумку на месте в более традиционном стиле.
При использовании у меня не было никаких проблем с сумкой — я не бился о нее ногами, что всегда вызывает беспокойство с большими рюкзаками.Его легко устанавливать и снимать, и он способен проглотить достаточно материала для эпопеи на весь день. Это был бы неплохой вариант и для вашего горного велосипеда; там много места для большой камеры, и она также действует как элементарный предохранитель, убирая с ваших шорт и майки самые сильные брызги от брызг на заднюю шину.
На внешней стороне Ortlieb есть две сплошные петли: одна сверху и одна снизу. Я не нашел ни того, ни другого особенно полезным для установки света, так как они в конечном итоге указывали прямо вверх или вниз, но вы можете сделать прямоугольный кронштейн или использовать их, чтобы прикрепить к сумке немного лишних вещей, если 2.Емкости 7л мало.
Сумка определенно не дешевая — 62 фунта стерлингов, особенно если учесть, что 20-литровую корзину Back Roller City от Ortlieb можно купить примерно на 13 фунтов больше. Но он хорошо справляется со своей задачей, рассчитан на длительный срок и дает дополнительную ночную видимость.
Вердикт
Очень качественная седельная сумка с хорошей видимостью в ночное время; не дешево, но хорошее вложение
Если вы думаете о покупке этого товара по кэшбэку, почему бы не воспользоваться дорогой.cc Top Cashback page и получайте верхний кэшбэк, поддерживая ваш любимый независимый велосипедный сайт
road.cc отчет об испытаниях
Марка и модель: Седельная сумка Ortlieb High Visibility
Протестированный размер: Черный — 2,7 л
Расскажите, для чего предназначен этот продукт и для кого он предназначен. Что об этом говорят производители? Как это соотносится с вашими собственными чувствами по этому поводу?
Ortlieb говорят: «Хорошая видимость так важна для нас в ORTLIEB, потому что это вопрос безопасности. Черная водонепроницаемая ткань Cordura с полиуретановым покрытием этой сумки плотно переплетена с световозвращающей пряжей. Эта композиция превращает всю сумку в хорошо заметный отражатель, когда она попадает в свет фар проезжающих машин.
Черная водонепроницаемая ткань Cordura с полиуретановым покрытием этой сумки плотно переплетена с световозвращающей пряжей. Эта композиция превращает всю сумку в хорошо заметный отражатель, когда она попадает в свет фар проезжающих машин.
Популярная сумка Saddle-Bag L сияет, как звезда, под вашим седлом. Вся поверхность сумки является отражающей, что дает вам решающую степень дополнительной безопасности за счет увеличения вашей заметности в свете фар проезжающих автомобилей. С его 2.Полезная нагрузка 7 литров, самая большая из седельных сумок ORTLIEB, предлагает вам достаточно места для запасной трубки, набора инструментов, дождевика и легких закусок ».
Расскажите подробнее о технических аспектах продукта?
* Седельная сумка с закрывающимся рулоном из светоотражающей ткани
* Водонепроницаемая сумка-седло для горных, шоссейных или туристических велосипедов
* Светоотражающая ткань без ПВХ
* Улучшенная видимость при попадании света фар за счет хорошо видимой светоотражающей ткани черного цвета
* Размер L обеспечивает достаточно места для куртки и необходимых мелких предметов (альтернатива рюкзаку)
* Защелкивающийся замок для быстрой установки и снятия
* Надежная водонепроницаемая рулонная застежка с D-образными кольцами для дополнительной фиксации и фиксации
* Высокоэффективный отражатель Scotchlite обеспечивает безопасность в темноте
* На велосипедах без брызговиков сумка защищает водителя от брызг — до определенной степени
* Защелкивающийся замок регулируется и легко устанавливается на различные седла
* Седельная сумка соответствует всем требованиям теста VELOTECH, обзорная доска для велосипедной техники
* Система крепления также доступна как аксессуар (напр. г. за второй байк)
г. за второй байк)
* Лента-липучка для подседельных штырей до 34,9 мм (например, складной велосипед Birdy)
* Крепежные ремни для подпружиненных седел, где нельзя использовать защелкивающийся замок (дополнительная принадлежность)
В комплекте: Седельная сумка с монтажным комплектом
Оцените товар за качество строительства:
9/10
Оцените товар за производительность:
8/10
Оцените долговечность продукта:
9/10
Оцените вес продукта, если применимо:
7/10
Оцените ценность продукта:
6/10
Расскажите, как в целом продукт работал по назначению
Очень хороший вариант для дневной езды.
Расскажите, что вам особенно понравилось в товаре
Хорошо сделанные, водонепроницаемые, светоотражатели работают хорошо.
Расскажите, что вам особенно не понравилось в данном товаре
Дорогое, крепление подходит не для всех положений седла.
Понравилось ли вам пользоваться продуктом? Есть
Вы бы подумали о покупке этого продукта? Есть
Вы бы порекомендовали этот продукт другу? Есть
Возраст: 42 Рост: 189 см Вес: 91 кг
Я обычно катаюсь: все, что тестирую… Мой лучший велосипед: Kinesis Tripster ATR
Я катаюсь: Более 20 лет Я катаюсь: Каждый день Я бы классифицировал себя как: Опытный
Я регулярно занимаюсь следующими видами катания: шоссейные гонки, поездки на работу, поездки в клубе, спортивные состязания, спортивная езда, фиксированная / одиночная скорость, катание на горных велосипедах, сноркелинг на горных велосипедах, трасса
Велосипедные фары | Советы и ресурсы
Зажги и будь увиденным
Все велосипедисты должны иметь легальное ношение и использовать передние и задние фонари в ночное время или в условиях низкой освещенности. Эффективные велосипедные фонари необходимы, чтобы другие участники дорожного движения могли видеть вас, когда вы едете в темноте. Это также закон — австралийские правила дорожного движения требуют, чтобы передний белый и задний красный свет были видны как минимум с 200 метров.
Эффективные велосипедные фонари необходимы, чтобы другие участники дорожного движения могли видеть вас, когда вы едете в темноте. Это также закон — австралийские правила дорожного движения требуют, чтобы передний белый и задний красный свет были видны как минимум с 200 метров.
Наша рекомендация…
Исследования показывают, что мигающий свет, установленный на руле и на высоте подседельного штыря, наиболее заметен для других участников дорожного движения, чтобы обеспечить максимальную видимость во время езды.
Важно прикрепить передние и задние фонари к велосипеду — те, которые прикреплены к одежде и сумкам, часто оказываются обращенными в неправильном направлении.Огни на шлемах менее заметны для водителей, а также могут представлять угрозу для других велосипедистов.
Что делает хороший свет?
Что касается велосипедных фонарей, мы оцениваем их по семи различным категориям:
Высокая видимая мощность (лобовая и угловая)
Отличная водонепроницаемость
Прочность
Простота использования
Легко устанавливается на велосипед
Легко заряжать или заменять батареи
Безопасное присоединение / отсоединение
Сэкономьте 30 долларов на годовом членстве. Не пропустите, это специальное предложение заканчивается в воскресенье, 31 января 2021 года!
Не пропустите, это специальное предложение заканчивается в воскресенье, 31 января 2021 года!
Получите скидку 20% при подписке на годовое членство до 9 сентября!
Присоединяйся сейчасСтаньте участником Bicycle Network и защитите себя во время езды всего за 11,49 долларов в месяц
Присоединяйся сейчасКакие огни лучше?
Мы составили рейтинг, оценили и протестировали лучшие велосипедные фонари по соотношению цена / качество, долговечность, простота использования и, конечно же, видимость.
В то время как гонщики должны быть видны только на 200 м, чтобы соблюдать правила дорожного движения, некоторые выбирают свет, который может освещать путь впереди. Итак, мы разделили наш тест на свет, который нужно «видеть», и свет, который «чтобы увидеть».
Итак, мы разделили наш тест на свет, который нужно «видеть», и свет, который «чтобы увидеть».
Все фонари из этого списка были рекомендованы и протестированы персоналом Bicycle Network с различным использованием от долгих дней на велосипеде до поездок на работу.
Чтобы увидеть
Фонарь передний Moon Meteor Vortex Pro 900L
Лучший свет
Cygolite Dash Pro 600L Передний фонарь
Лучшая цена
Будьте замечены
BBB Передняя фара Ultrabeam Deluxe Light
Лучший свет
Knog Plus
Лучшая цена
Задние фонари
Knog Kobber светлый
Лучший свет
Knog Plus (задний)
Лучшая цена
Помните, что при использовании света, чтобы видеть, слишком яркий свет является проблемой для других участников пути или дорожного движения. Будьте внимательны и держите фары направленными вниз, когда к вам подходят другие гонщики или участники дорожного движения.
Будьте внимательны и держите фары направленными вниз, когда к вам подходят другие гонщики или участники дорожного движения.
Тест освещения
Какие огни лучше?
Мы составили рейтинг, оценили и протестировали лучшие велосипедные фонари по соотношению цена / качество, долговечность, простота использования и, конечно же, видимость.
В то время как гонщики должны быть видны только на 200 м, чтобы соблюдать правила дорожного движения, некоторые выбирают свет, который может освещать путь впереди. Итак, мы разделили наш тест на свет, который нужно «видеть», и свет, который «чтобы увидеть».
40 лучших велосипедных фонарейБудьте замечены
Лунная маска
Лучший свет
Кног поп 1
Лучшая цена
Чтобы увидеть
Луна LX360
Лучший свет
Гигантский Numen Plus HL1
Лучшая цена
Задние фонари
Блиндер Knog MOB V Kid Grid
Лучший свет
Отбойник 1 задний
Лучшая цена
Помните, что при использовании света, чтобы видеть, слишком яркий свет является проблемой для других участников пути или дорожного движения.