Асинхронный двигатель устройство: Асинхронный электродвигатель: устройство и принцип работы
Асинхронный электродвигатель: устройство и принцип работы
Содержание
- Устройство асинхронного электродвигателя
- Принцип работы асинхронного двигателя
- Преимущества асинхронных двигателей
Самым эффективным устройством, превращающим электрическую энергию в механическую, является асинхронный двигатель, изобретенный инженером Доливо-Добровольским в конце 19 века. Учитывая возрастающий интерес современников к разработке и сборке станков, самодвижущихся аппаратов и прочих механизмов, мы постараемся объяснить, как работает асинхронный электродвигатель, чтобы вы могли понять принцип его действия и результативно его использовать.
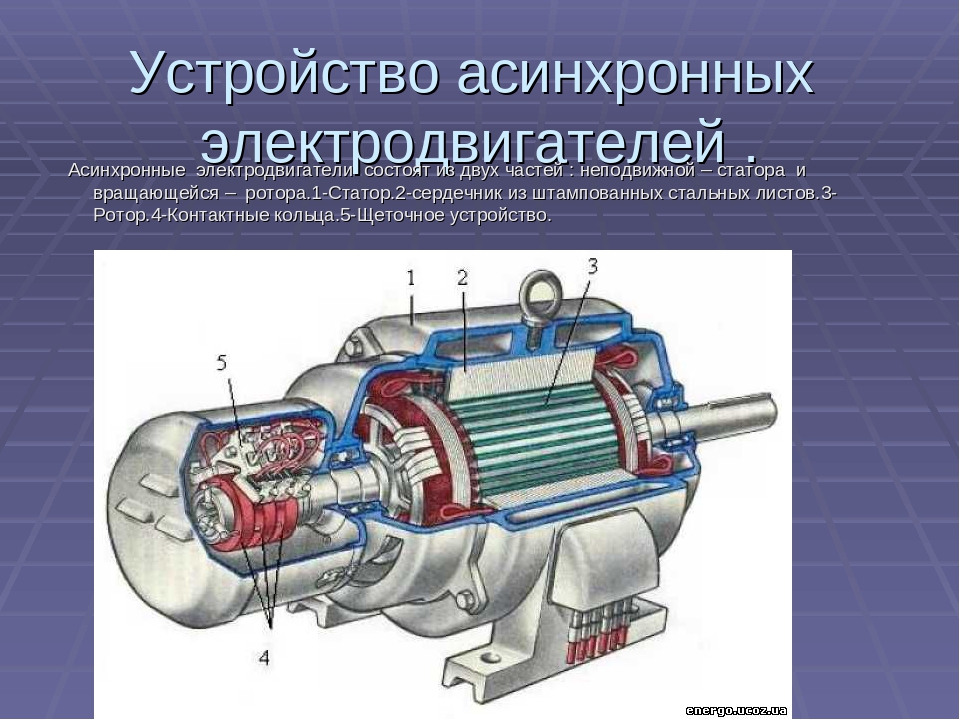
Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.

- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
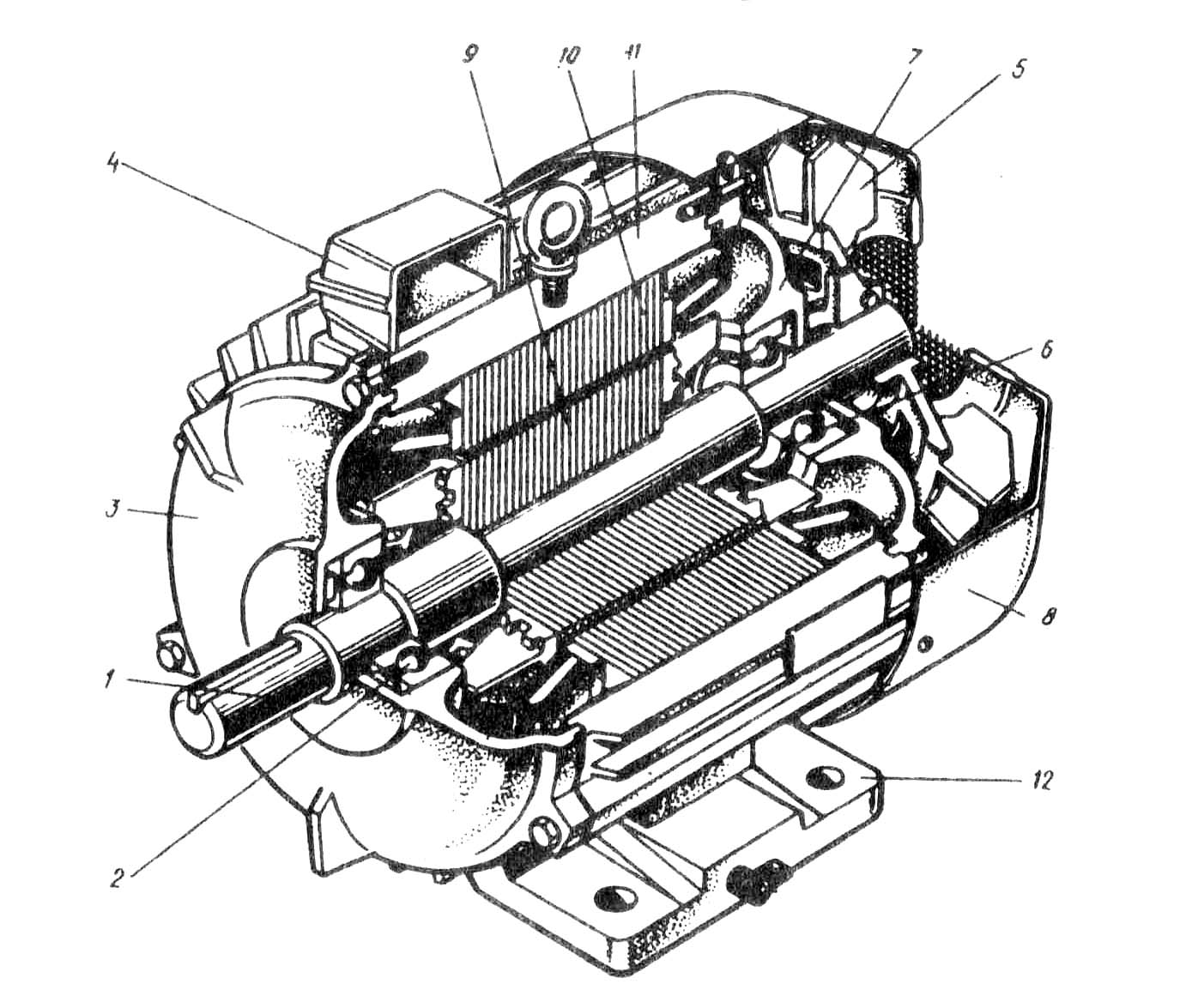
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов.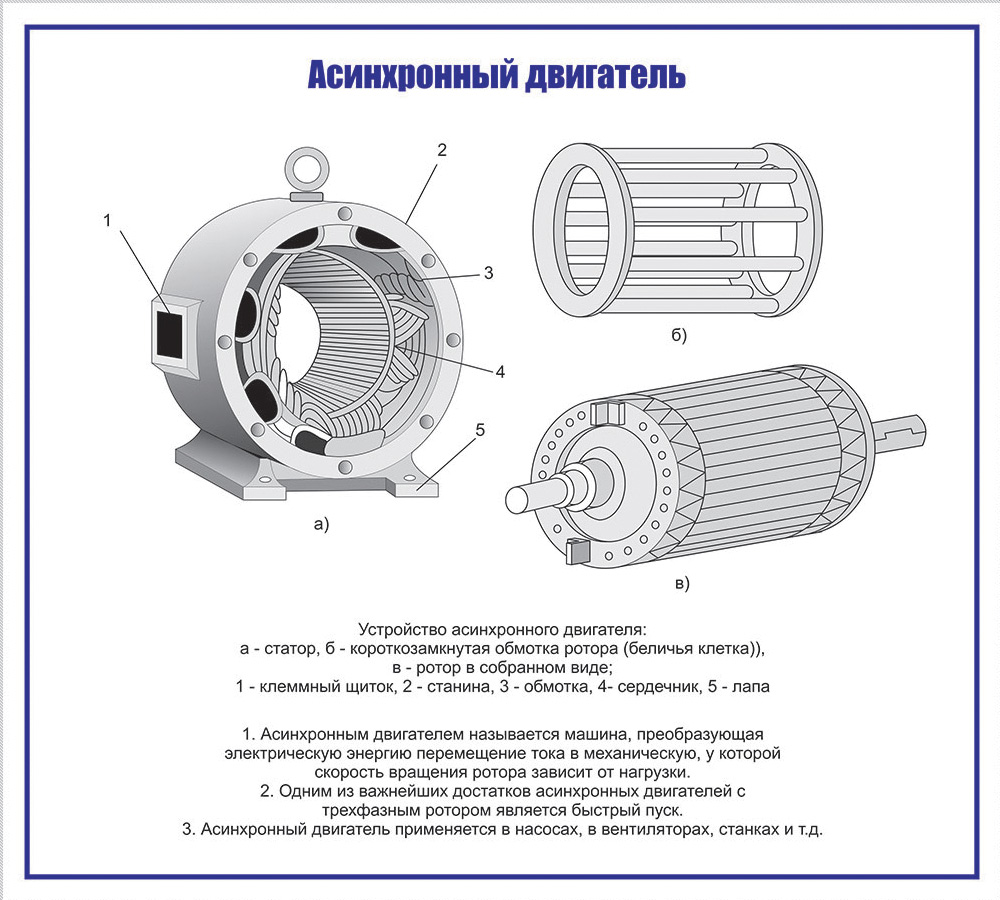 Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
С ним наша жизнь стала более комфортной.
Схема высоковольтных асинхронных двигателей, устройство и использование
Преобразование электрической энергии переменного тока в механическую энергию происходит с использованием асинхронного двигателя, который делят на два вида: с фазным или короткозамкнутым ротором.
Асинхронный высоковольтный двигатель выполнен в прочном чугунном корпусе и состоит из двух частей – неподвижного статора и подвижного ротора. Конструктивно статор и ротор представляют собой сердечник и обмотку – включается в сеть обмотка статора, поэтому она называется первичной, обмотка ротора – вторична.
Подключение в сеть 380Вт образует в обмотке статора вращающееся магнитное поле, которое «пронизывает», соединяет обмотку статора и ротора и индуцирует электродвижущую силу. Фактически, вращение магнитного поля статора вступает во взаимодействие с индуцируемым током в обмотке ротора. Совокупность взаимодействия электромагнитных сил статора и ротора создает электромагнитный момент.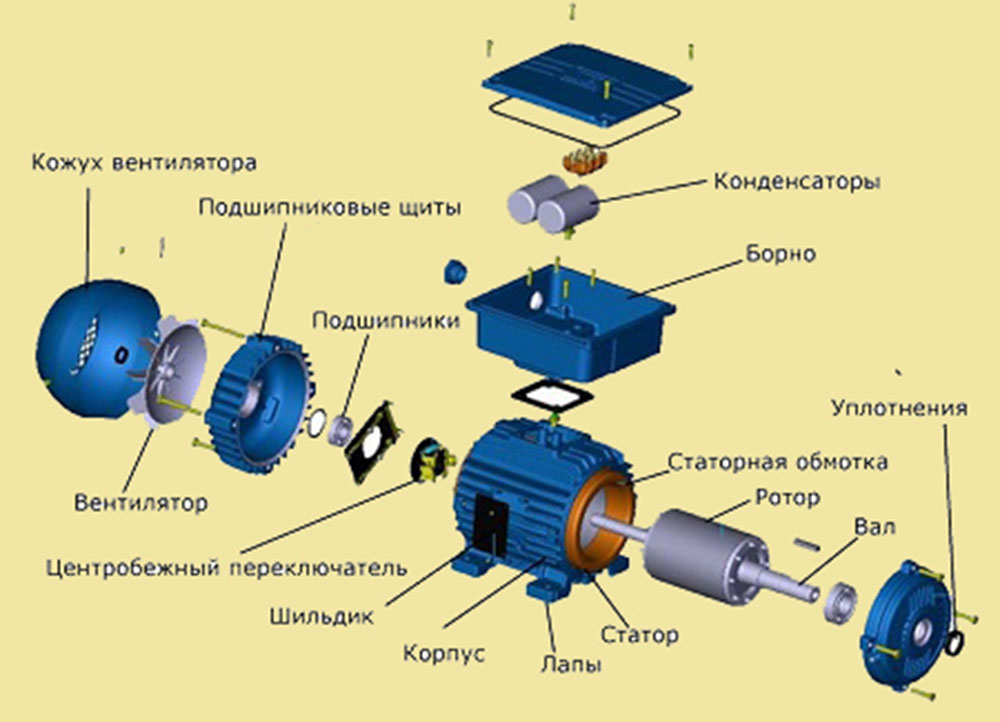 Крутящий вал электродвигателя с определенной частотой называется асинхронной.
Крутящий вал электродвигателя с определенной частотой называется асинхронной.
Охлаждение: двигатели мощностью не более 15 кВт обдуваются снаружи. Для охлаждения устанавливается центробежный вентилятор, который прикрывается защитным кожухом. Объем охлаждения увеличивается за счет поверхности из продольных ребер.
Модели с двигателями мощности выше 15 кВт помимо обдува внешней поверхности имеют внутреннюю вентиляцию – отверстия в подшипниковых щитах, через которые проходящий воздух обдувает внутреннюю полость мотора, обмотку и сердечник. Такое охлаждение значительно эффективнее. При необходимости возможно исполнение асинхронного двигателя с системой водяного охлаждения, когда требуется большое значение выходной мощности.
Преимущества высоковольтных асинхронных двигателей
В сравнении с газотурбинными двигателями аналогичной мощности асинхронный двигатель – это принципиально новое оборудование, легкое в обслуживании, оптимизированное под конкретную задачу.
В разы снижены потери мощности, тепла, возможность подключения сверхмощного оборудования напрямую в сеть без использования трансформатора и затрат, связанных с его обслуживанием – такие достоинства делают двигатели асинхронного типа востребованными для тяжелой и легкой промышленности.
Фактически это универсальный, мощный и сверхнадежный двигатель, работающий от сети переменного тока значением больше 1000 В. Среди достоинств отмечают высокую удельную мощность (выше 250 кВт), малый уровень шума, минимум эксплуатационных расходов и длительный срок эксплуатации.
На сегодняшний день это самые компактные двигатели на мировом рынке относительно своей мощности, с дополнительным покрытием корпуса из чугуна, антикоррозийной защитой.
Сферы применения асинхронного 3-хфазного двигателя
Подбор асинхронного двигателя осуществляется в зависимости от предполагаемых эксплуатационных нагрузок. Модификации – стандартное исполнение, морское и взрывозащищенный корпус. Для чего используются устройства – привести в движение транспортировочные механизмы – перекачка нефти, воды, различных жидкостей, для компрессорного оборудования, для механизмов с нагрузочной, так называемой, «вентиляторной» характеристикой.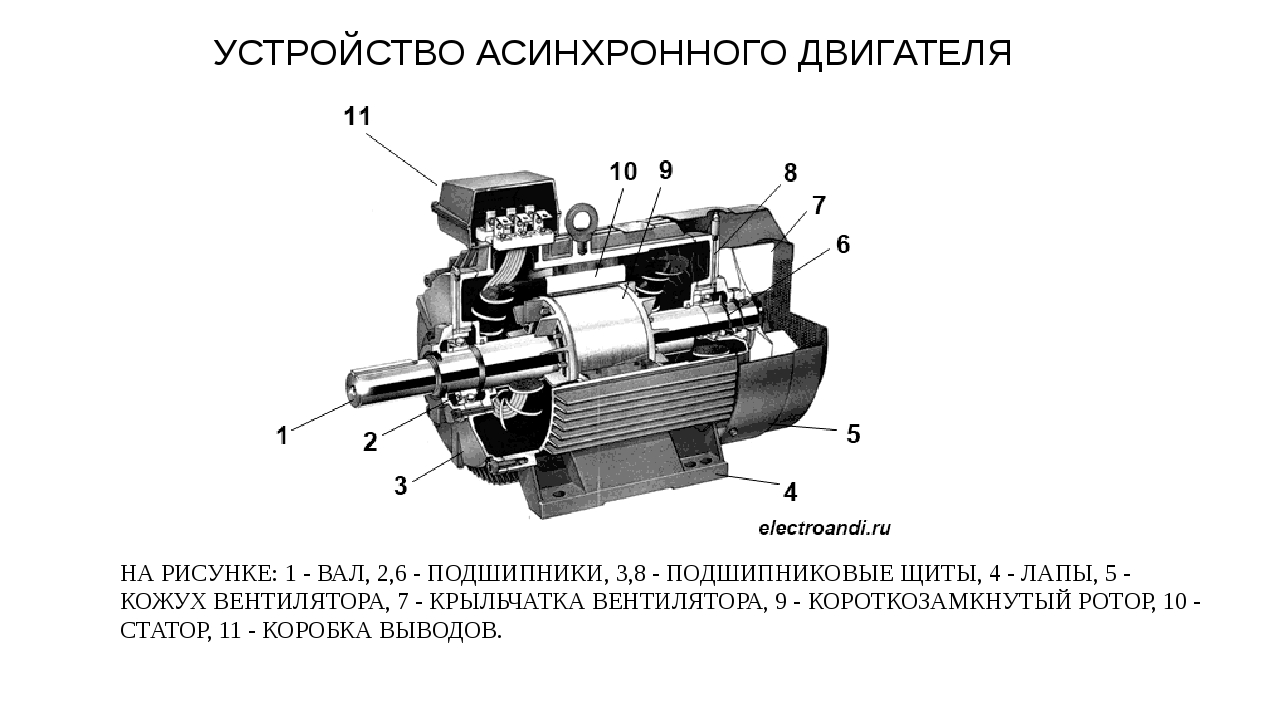
Преимущества и недостатки асинхронного двигателя
Подавляющее большинство электродвигателей, используемых в промышленности – асинхронные двигатели с короткозамкнутым ротором. В новом оборудовании их доля составляет более 95%, остальное – серводвигатели, шаговые двигатели, щеточные двигатели постоянного тока и некоторые другие специфические виды приводов.
Преимущества асинхронного двигателя
Конструкция. По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкцию. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Подключение. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования.
Эксплуатация. Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет.
Недостатки асинхронных двигателей
Скорость вращения ротора. Скорость вращения вала двигателя зависит от частоты питающей сети (стандартные значения в промышленности – 50 и 60 Гц) и от количества полюсов обмоток статора.
Это можно считать недостатком в том случае, когда необходимо в процессе работы менять скорость вращения. Для решения данной проблемы были разработаны многоскоростные асинхронные двигатели, у которых имеется возможность переключения обмоток.
Кроме того, в современном оборудовании управление скоростью реализуется за счет преобразователей частоты.
Скольжение. Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При необходимости скольжение можно скомпенсировать, а скорость вращения сделать независимой от нагрузки при помощи преобразователя частоты.
Величина напряжения питания. В сырых и влажных помещениях, где действуют повышенные требования к электробезопасности, применение асинхронного электродвигателя может быть невозможным. Дело в том, что из-за конструктивных особенностей такие двигатели практически не производятся на напряжение питания менее 220 В. В таких случаях применяют приводы постоянного тока, рассчитанные на напряжение 48 В и менее, либо используют гидравлические или пневматические приводы.
Чувствительность к напряжению питания. При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Пусковой ток. Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
Чаще всего для понижения пускового тока применяют схему «Звезда-Треугольник», устройства плавного пуска и преобразователи частоты. Также можно использовать асинхронные двигатели с фазным ротором.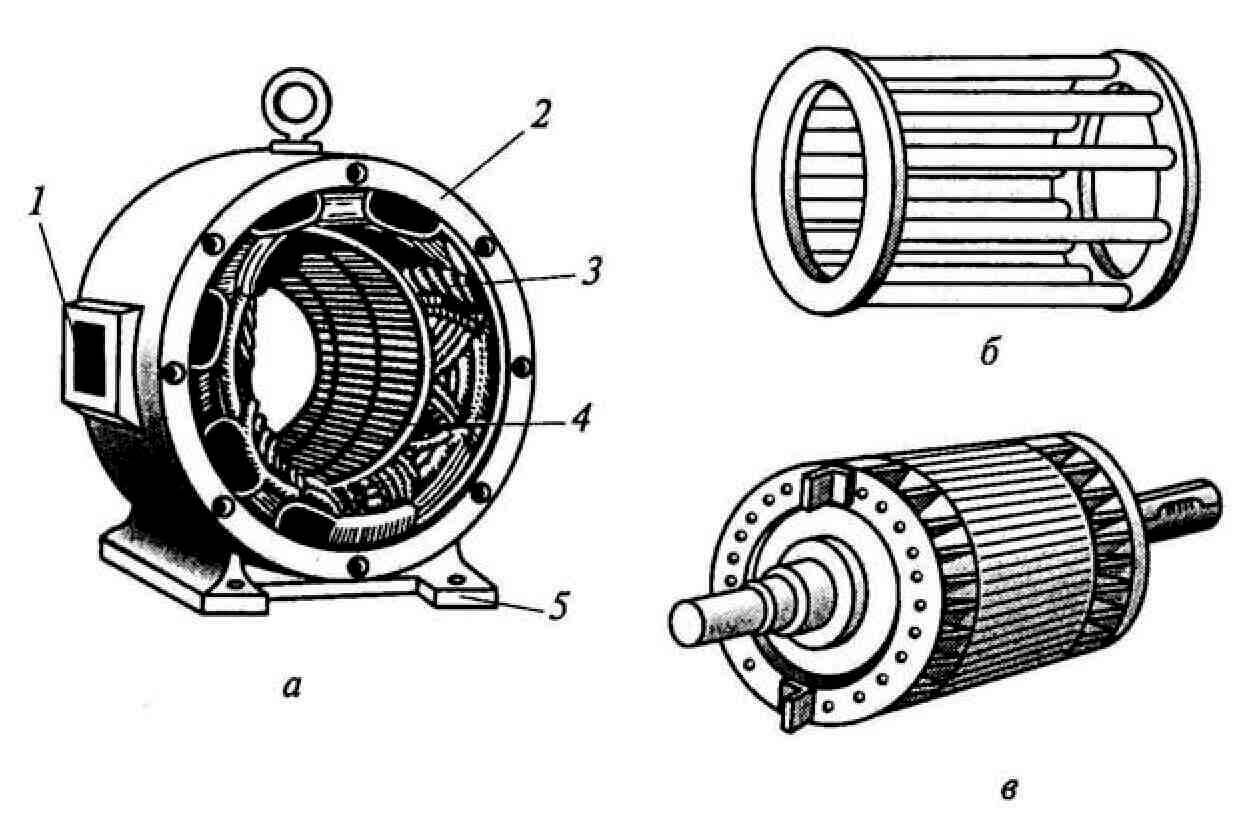
Пусковой момент. В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При использовании частотного преобразователя момент при пуске и на низких частотах может быть увеличен за счет повышения напряжения.
Вывод
Плюсы асинхронных двигателей значительно перевешивают минусы. В большинстве случаев недостатки компенсируются путем применения преобразователей частоты и других устройств пуска.
Другие полезные материалы:
Способы защиты электродвигателей
Когда не нужен плавный пуск
Когда нецелесообразно ремонтировать двигатель
Устройство однофазного асинхронного двигателя ~ Электропривод
Наибольшее применение однофазные асинхронные электродвигатели нашли в быту и малом бизнесе.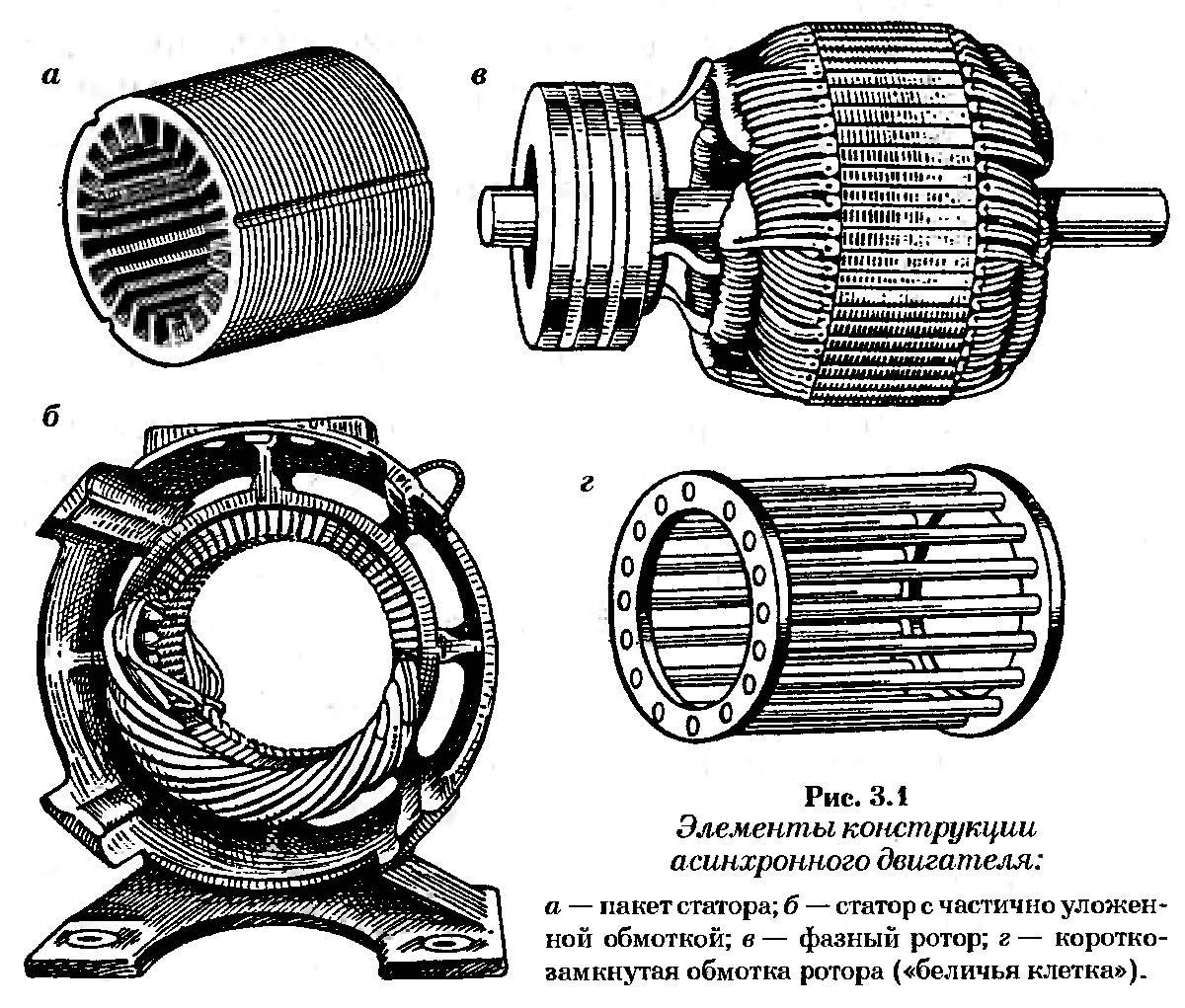 Их применение необходимо в тех областях, где нет трехфазной электрической сети. Многие компании выпускаются однофазные электродвигатели мощностью до 2 кВт и выше. Применение однофазных двигателей большей мощности ограничено мощностью бытовой сети и проблемами запуска однофазного двигателя.
Их применение необходимо в тех областях, где нет трехфазной электрической сети. Многие компании выпускаются однофазные электродвигатели мощностью до 2 кВт и выше. Применение однофазных двигателей большей мощности ограничено мощностью бытовой сети и проблемами запуска однофазного двигателя.
Приемлемое, на сегодняшний день, решение таких проблем возможно при использовании однофазного частотного преобразователя. Но применение преобразователя частоты будет оправдано в том случае, когда необходимо регулировать частоту вращения электродвигателя. Кроме того, однофазные частотные преобразователи обычно выпускаются до мощности 2,2кВт, что в свою очередь тоже является ограничением. В таком случае приходится использовать однофазный асинхронный двигатель. Внешний вид однофазных асинхронных двигателей различных фирм производителей показан на рисунках.
Устройство однофазного асинхронного двигателя показано на рисунке
Как видно из рисунка, основное отличие однофазного двигателя от трехфазного, является наличие в нем центробежного переключателя. Центробежный переключатель подключает пусковую обмотку двигателя перед пуском и отключает после окончания пуск, при достижении двигателя номинальных оборотов. Центробежный переключатель состоит из специальной стальной пружины и калиброванных грузиков, которыми настраивается момент отключения пусковой обмотки. Вся конструкция собрана в надежном корпусе. Быстрая работа переключателя уменьшает искрение и износ контактов и продлевает надежную работу устройства.
Центробежный переключатель подключает пусковую обмотку двигателя перед пуском и отключает после окончания пуск, при достижении двигателя номинальных оборотов. Центробежный переключатель состоит из специальной стальной пружины и калиброванных грузиков, которыми настраивается момент отключения пусковой обмотки. Вся конструкция собрана в надежном корпусе. Быстрая работа переключателя уменьшает искрение и износ контактов и продлевает надежную работу устройства.
Центробежный переключатель
Другой элемент, которого нет в трехфазном асинхронном двигателе, но который есть в однофазном это рабочий и пусковой конденсатор.
Пусковой конденсатор
Конденсатор может быть установлен и вне двигателя, например, вместе с пускозащитной аппаратурой.
Корпус
Корпус электродвигателей изготовлен из высококачественного из алюминиевого сплава или чугуна марки. В корпусе сделаны боковые отверстия для циркуляции воздуха. Возможна работа однофазного двигатель и в горизонтальном и в вертикальном положении.
Статор двигателя
Статор однофазного двигателя изготавливается из ламината качественной электротехнической стали с термохимической обработкой, что снижает магнитные потери и рабочую температуру двигателя. Сердечник статора, набирается из штампованных листов электротехнической стали. В пазы сердечника укладывается статорная обмотка. Изоляция пазов статора, изоляция обмоточного провода, пропиточный состав и другие изоляционные детали статора образуют систему изоляции.
Обмотки
Статорная обмотка наматывается круглым эмалированным проводом и пропитана в нагревостойком электроизоляционном лаке. Обмоточный провод как стандарт покрыт лаком класса Н. После укладки вся обмотка повторно пропитывается специальным полиэстерным составом. Такая технология обеспечивает высокую электрическую и механическую надежность обмоток и долгий срок службы. Обмотка статора мотается как две обмотки главная(рабочая) (U1 и U2) и вспомогательная (пусковая) (Z1 и Z2).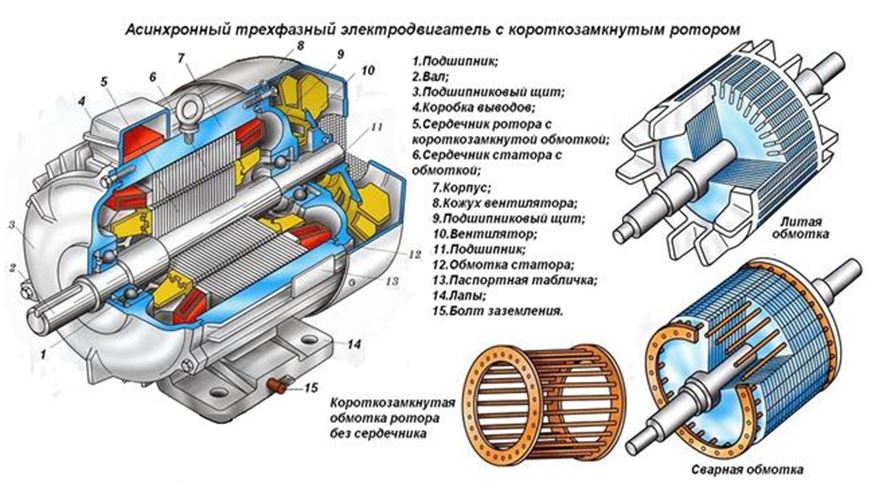 Главная обмотка подключается непосредственно к сети, вспомогательная обмотка также подключается к сети, но через рабочий конденсатор.
Главная обмотка подключается непосредственно к сети, вспомогательная обмотка также подключается к сети, но через рабочий конденсатор.
Ротор
Сердечник ротора однофазного двигателя изготовлен из ламината качественной стали с термической и химической обработкой. Его напрессовывают на вал. Обмотка ротора имеет название «Беличья клетка» или «Беличье колесо»- короткозамкнутая отливается из чистого алюминия . что обеспечивает низкий момент инерции и повышение К П Д.
Вал
Вал однофазного двигателя изготавливают из углеродистой стали. Такая сталь имеет высокую механическую прочность, и предотвращает прогиб вала под нагрузкой, что уменьшает его износ. По отдельному заказу вал однофазного двигателя можно изготовить из нержавеющей стали.
Подшипниковые щиты
Подшипниковые щиты отливаются из алюминиевого сплава или чугуна с армирующей стальной втулкой под посадку подшипника. Их площадь поверхности увеличина для лучшего охлаждения подшипников.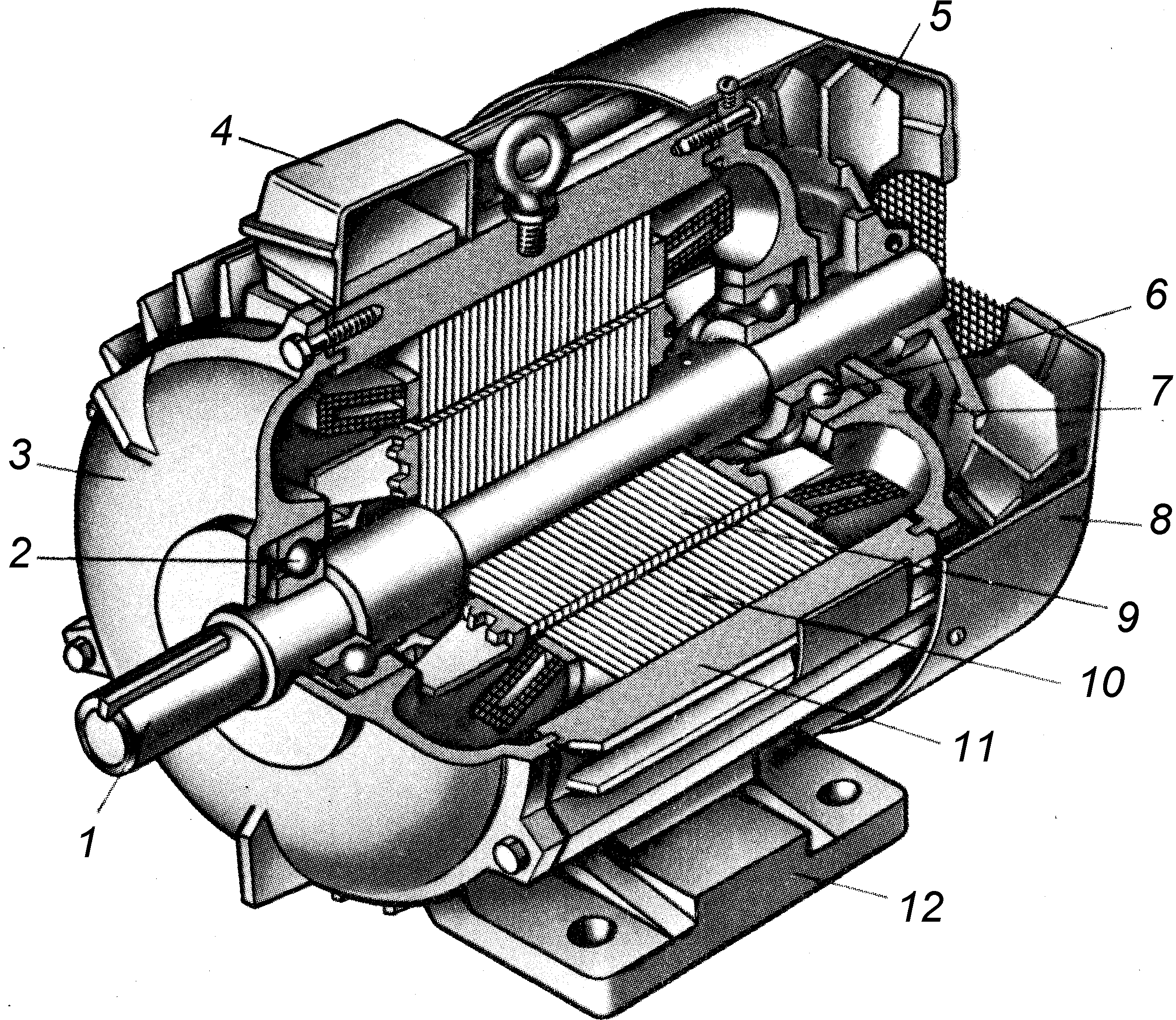 Обычно в переднем подшипниковом щите устанавливается невинтовая пружина, предназначенная для осевого поджатия подшипника.
Обычно в переднем подшипниковом щите устанавливается невинтовая пружина, предназначенная для осевого поджатия подшипника.
Подшипниковые узлы
Обычно в однофазных двигателях применяются шариковые подшипники, но в двигателях большими высотами оси вращения по отдельному заказу можно применять роликовые подшипники, которые допускают в 2 раза большие радиальные нагрузки. В однофазных двигателях с высотой оси вращения до 180 мм в подшипники закладывается смазка на весь гарантийный срок службы (не менее 20 тыс. часов). В подшипниковые узлы однофазных двигателей с осями вращения более 200 мм необходимо регулярно производить полную или частичную смену отработанной смазки. График смены смазки можно найти в инструкции по эксплуатации двигателя. Типы и размеры применяемых в двигателях подшипников указаны в каталогах. В них же можно найти величины предельно допустимых радиальных и осевых нагрузок рабочего конца вала
.
Подшипники
Импортные однофазные двигатели снабжаются подшипниками высокого качества, от лучших всемирных брендов. Это обеспечивает длительный срок службы в тяжёлых условиях работы. В качестве смазки используется высококачественная смазка Super-premium Polyrex ЕМ. Эта смазка обеспечивает надежную работу подшипников и низкий уровень шума. В двигателях отечественных производителей используются более дешевые подшипники 76-180205Ш2У (6205 2RS P63.QE6) с постоянно заложенной смазкой на весь срок службы.
Это обеспечивает длительный срок службы в тяжёлых условиях работы. В качестве смазки используется высококачественная смазка Super-premium Polyrex ЕМ. Эта смазка обеспечивает надежную работу подшипников и низкий уровень шума. В двигателях отечественных производителей используются более дешевые подшипники 76-180205Ш2У (6205 2RS P63.QE6) с постоянно заложенной смазкой на весь срок службы.
Вентилятор
Вентилятор однофазного двигателя изготавливают из пластмассы. Его устанавливают на вал ротора а сверху защищая кожухом. Вентиляторы служат для обеспечения эффективного охлаждения двигателя. Новые компьютерные программы моделирования асинхронных двигателей позволяют разрабатывать вентилятор и его крышку для работы с минимальным уровнем шума. Обдув осуществляется внешним вентилятором, закрытым направляющим кожухом. Двигатели производятся с симметричной радиальной, либо с комбинированной системой вентиляции. В двигателях с симметричной радиальной вентиляцией в станине предусмотрены отверстия для выхода воздуха. Изнутри станины отлиты выступы с каналами для протока воздуха в аксиальном направлении. Вентилятор, отлитый вместе с короткозамыкающими кольцами ротора прогоняется воздух через двигатель. Для циркуляции воздуха внутри двигателя используются диффузоры, смонтированные в двух подшипниковых щитах.
Изнутри станины отлиты выступы с каналами для протока воздуха в аксиальном направлении. Вентилятор, отлитый вместе с короткозамыкающими кольцами ротора прогоняется воздух через двигатель. Для циркуляции воздуха внутри двигателя используются диффузоры, смонтированные в двух подшипниковых щитах.
Обдув однофазного двигателя с комбинированной вентиляцией производится центробежным вентилятором, установленным на валу двигателя со стороны, противоположной приводу. Вентилятор обдувает ребристую поверхность станины и вентиляционными лопатками ротора всасывающими воздух через нижнюю часть отверстий в подшипниковых щитах. Воздух омывает лобовые части обмотки и выбрасывается через верхнюю часть отверстий в щитах.
Клемная коробка
Клемная коробка однофазного двигателя изготовливают из алюминиевого сплава или чугуна. В коробке предусмотрено одно или два резьбовых отверстия для сальников, через которые проходят присоединительные кабеля. Конструкция клемной коробки позволяет монтировать коробку с шагом 90°.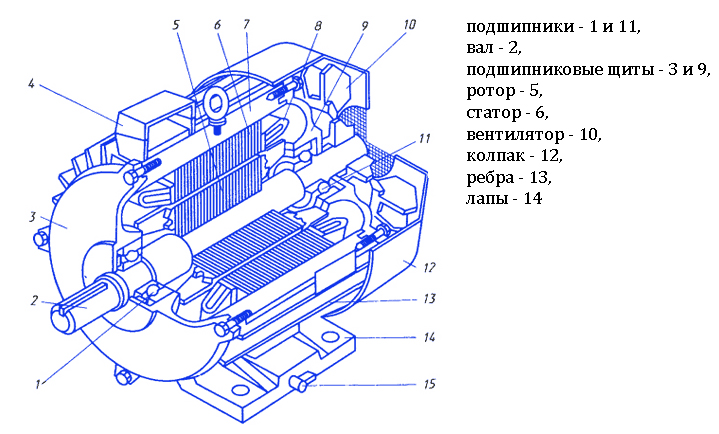 При заказе двигателя необходимо уточнять верхнее или боковое расположение клемной коробки.
При заказе двигателя необходимо уточнять верхнее или боковое расположение клемной коробки.
Лапы
В зависимости от способа крепления двигатели подразделяются на фланцевые и со способом крепления на лапах. Существуют универсальные двигатели с лапами и фланцем. Существуют конструкции со съемными лапами позволяющие изменять способ монтажа.
Уплотнения
Для защиты однофазного двигателя от агрессивных условий окружающей среды в электродвигателях применяются V-образные манжеты и манжеты с пружиной. Система уплотнения состоит из трех компонентов (лабиринтное уплотнение с V-образной манжетой и О-образная манжета). Такая конструкция гарантируют защиту подшипников против агрессивных жидких и твердых веществ.
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.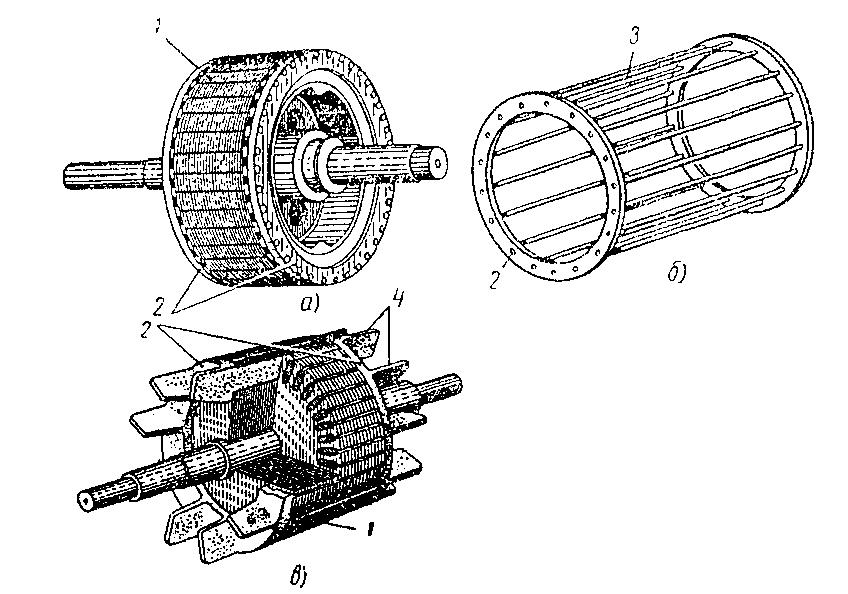
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться.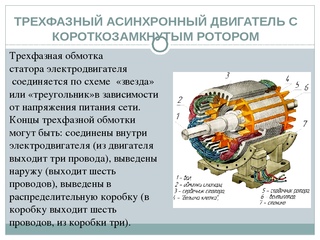 Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
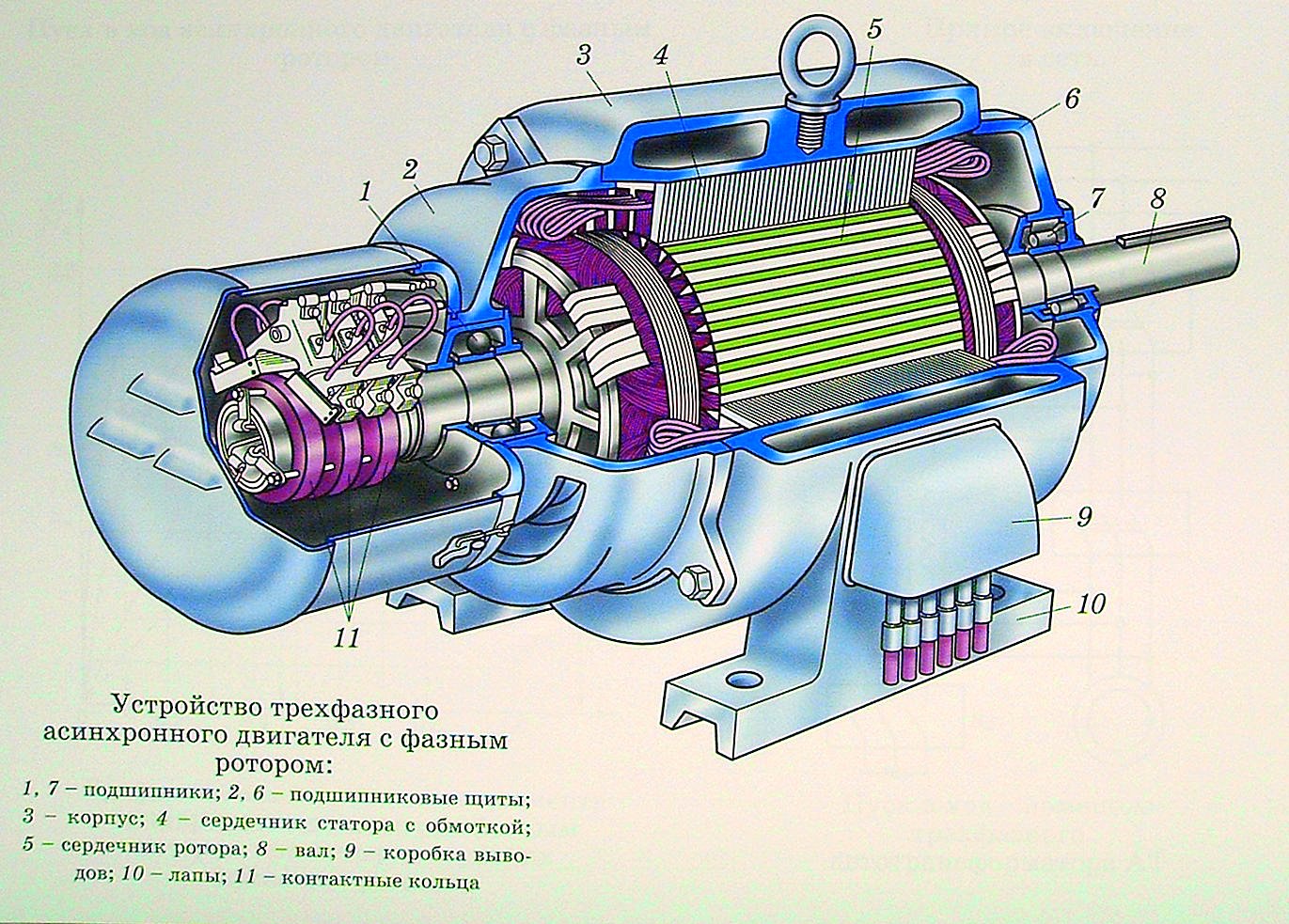
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.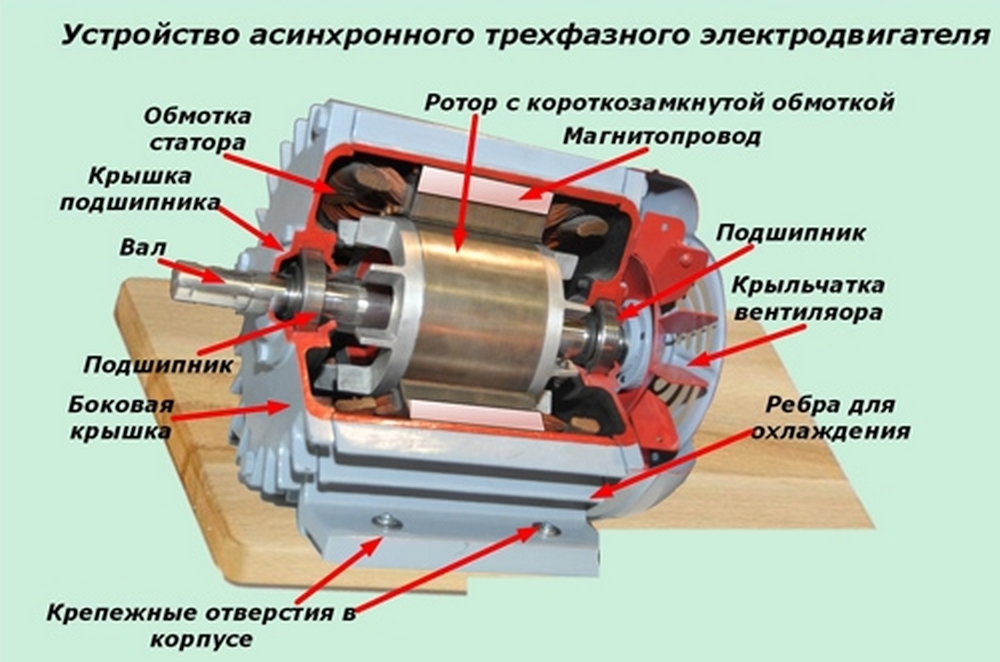
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т.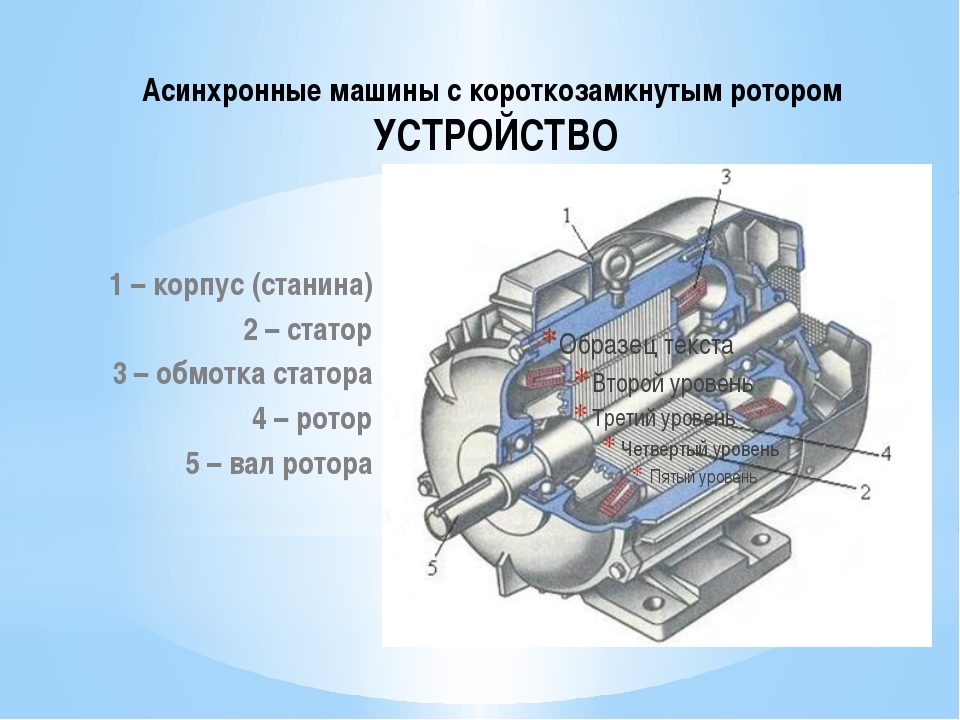 д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
д. полюсов. Катушки статора сдвинуты между собой на 120, 60, 40 и т. д. градусов. При этом на фазном роторе делается столько же полюсов, сколько и на статоре.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
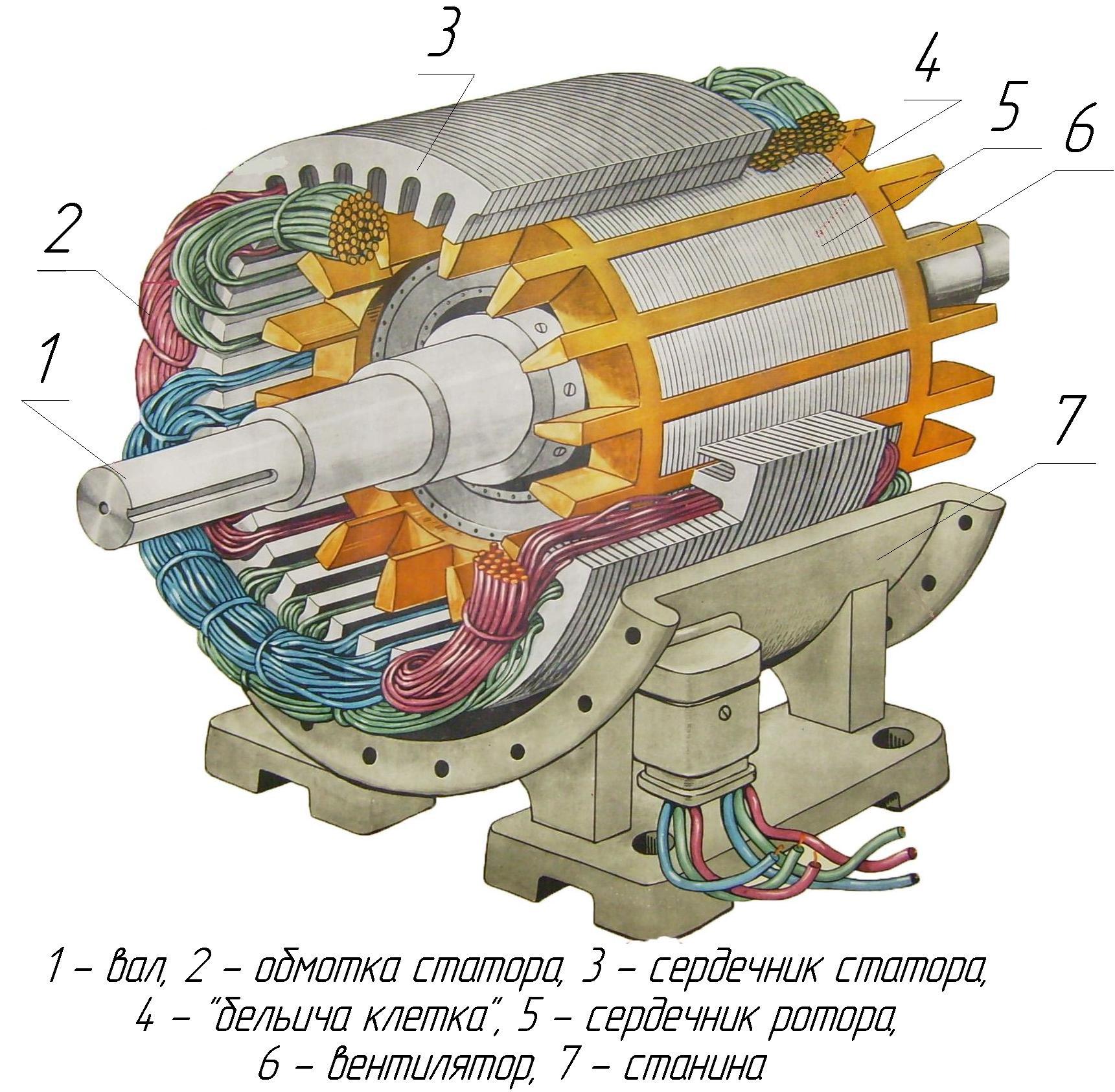
Устройство трехфазного асинхронного двигателя
Электродвигателем называется электрическая машина, функциональным назначением которой является преобразование энергии электрической в энергию механическую. Существует несколько типов электродвигателей постоянного или переменного тока.
Одним из наиболее распространенных типов электродвигателей, нашедших свое применение в производственных условиях различного назначения, является трехфазный асинхронный двигатель переменного тока с короткозамкнутым ротором.
Отличительными особенностями данного типа электродвигателей является отсутствие скользящих контактов, простота и надежность конструкции, легкость технического обслуживания.
Основной функциональный узел трехфазного асинхронного двигателя включает в себя две составные части: статор и короткозамкнутый ротор. Конструктивно статор и ротор представляют собой пакеты пластин, выполненных из специальной электротехнической стали.
Сердечник статора имеет трехфазную обмотку, уложенную и закрепленную в специальных пазах. Фазы обмотки статора соединены по типу «звезда» или «треугольник» в зависимости от напряжения и особенностей питающей сети.
Сердечник ротора и его обмотка не изолированы друг от друга. Обмотка ротора и вентиляционные лопатки представляют собой слитную конструкцию, выполненную из сплава алюминия или полностью алюминиевую. Стержневые выводы обмотки ротора накоротко замкнуты надетыми на них кольцами и образуют конструкцию, называемую «беличьей клеткой».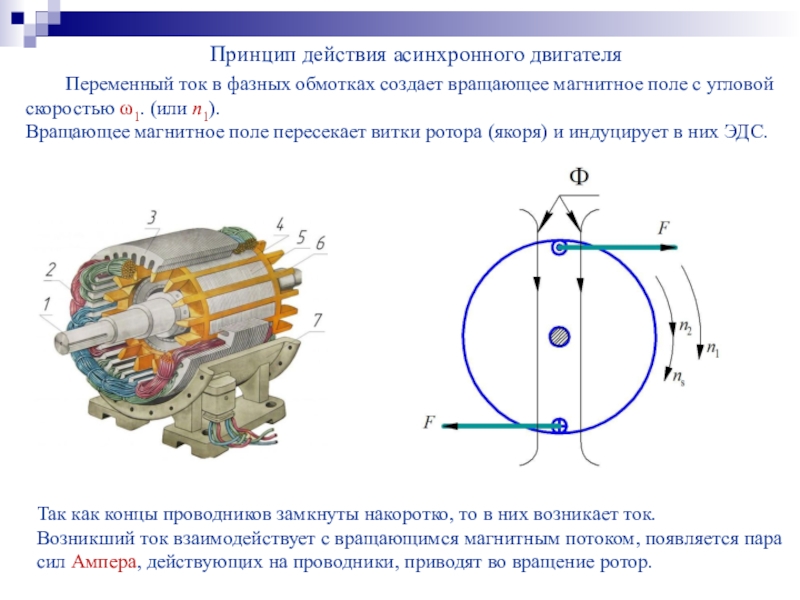
Принцип действия трехфазного асинхронного двигателя основан на использовании закона электромагнитной индукции. Сердечник статора с трехфазной обмоткой создает вращающееся магнитное поле, силовые линии которого пересекают короткозамкнутые стержневые выводы обмотки ротора. Электродвижущая сила, наведенная в роторе, способствует протеканию переменного тока в его обмотке.
Переменный ток, протекающий в обмотке ротора, создаёт вокруг него магнитное поле, силовые линии которого пересекаются с магнитным полем сердечника статора. Взаимодействующие магнитные поля приводят в движение ротор, который начинает вращаться в направлении магнитного поля статора.
Двигатель назван асинхронным из-за частоты вращения ротора, которая имеет несколько меньшую величину, чем синхронная частота вращения магнитного поля статора и считается асинхронной.
Конструкция асинхронных трехфазных двигателей достаточно проста и надежна в эксплуатации, что позволяет оборудовать ими технические устройства различного назначения. Асинхронные трехфазные двигатели приводят в движение многие виды производственного оборудования и вспомогательных механизмов.
Асинхронные трехфазные двигатели приводят в движение многие виды производственного оборудования и вспомогательных механизмов.
Трехфазными асинхронными двигателями оснащены станки металлообрабатывающей и деревообрабатывающей промышленности, насосное и конвейерное оборудование, строительная техника, многие виды вспомогательных технических устройств.
Трехфазные асинхронные двигатели надежны и не теряют работоспособности в условиях значительных кратковременных перегрузок.
Асинхронные двигатели, наиболее пригодны, для изготовления в герметическом исполнении. Такие двигатели могут эксплуатироваться даже в очень тяжелых специфических условиях.
Простая и надежная конструкция трехфазных асинхронных электродвигателей обуславливает их повсеместное использование в различных сферах производства. Данный тип двигателей нашел широкое применение в технологическом оборудовании для строительной, судостроительной, автомобилестроительной и многих других отраслей.
Асинхронный двигатель: пуск, резервирование, управление — Энергетика и промышленность России — № 01-02 (141-142) январь 2010 года — WWW.EPRUSSIA.RU
Газета «Энергетика и промышленность России» | № 01-02 (141-142) январь 2010 года
В промышленных системах существует категория потребителей, которые требуют непрерывного и качественного электроснабжения независимо от присутствия и качества напряжения в электрической сети.Построение систем гарантированного электроснабжения
Для этого применяются системы, построенные на основе электронных преобразователей напряжения и аккумуляторной батареи, обозначаемые UPS (Uninterruptible Power System). Стандартный UPS, выполненный по технологии Online, обеспечивает бесперебойное питание потребителей переменным напряжением стабильной амплитуды и частоты, не зависящим от качества напряжения в электрической сети.
Стандартные UPS применяют для питания большинства потребителей, таких, как: компьютерные системы, аварийные источники освещения, устройства телекоммуникации, контроллеры КИПиА, контроллеры АСУ ТП и т.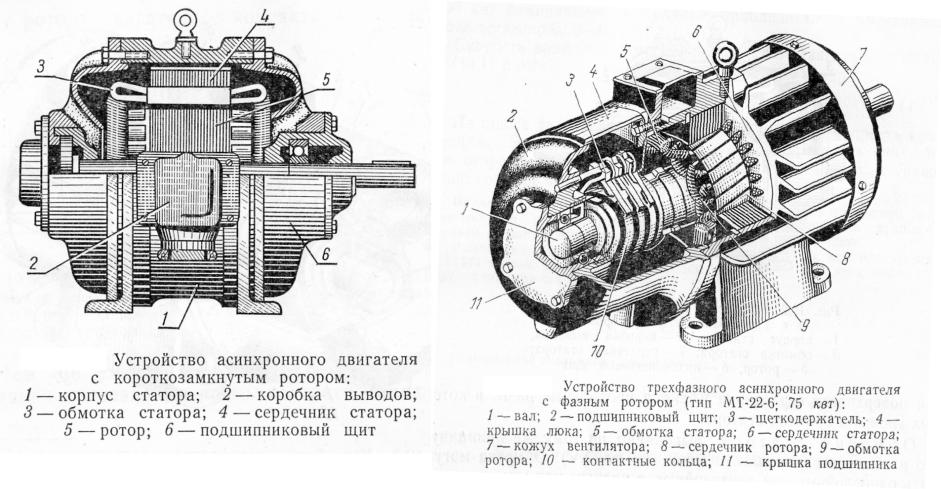 д. Однако существуют категории потребителей, требующих индивидуального подхода в решении вопроса гарантированного электроснабжения. Стандартные UPS допускают кратковременную перегрузку на выходе максимум до трех номинальных значений выходного тока. В частности, для запуска асинхронных двигателей, подключенных в качестве потребителей, такой перегрузочной способности стандартного UPS недостаточно, т. к. пусковые токи двигателей могут шестикратно превышать номинальный ток. Дополнительный фактор, что ток питания двигателя, получаемый от перегруженного UPS, не обладает синусоидальной формой, что может привести к нарушениям во время запуска, а также к полному отсутствию запуска. Проблему можно решить увеличением номинальной мощности UPS, но это приводит к удорожанию всей системы. Фирма APS Energia предлагает техническое решение для данной категории потребителей.
д. Однако существуют категории потребителей, требующих индивидуального подхода в решении вопроса гарантированного электроснабжения. Стандартные UPS допускают кратковременную перегрузку на выходе максимум до трех номинальных значений выходного тока. В частности, для запуска асинхронных двигателей, подключенных в качестве потребителей, такой перегрузочной способности стандартного UPS недостаточно, т. к. пусковые токи двигателей могут шестикратно превышать номинальный ток. Дополнительный фактор, что ток питания двигателя, получаемый от перегруженного UPS, не обладает синусоидальной формой, что может привести к нарушениям во время запуска, а также к полному отсутствию запуска. Проблему можно решить увеличением номинальной мощности UPS, но это приводит к удорожанию всей системы. Фирма APS Energia предлагает техническое решение для данной категории потребителей.
FAT – система гарантированного электроснабжения асинхронных электродвигателей
В промышленных системах различных отраслей в качестве одной из составляющих применяются приводные системы, которые должны бесперебойно вращаться электродвигателями, либо необходим старт двигателя в момент исчезновения напряжения в электрической сети.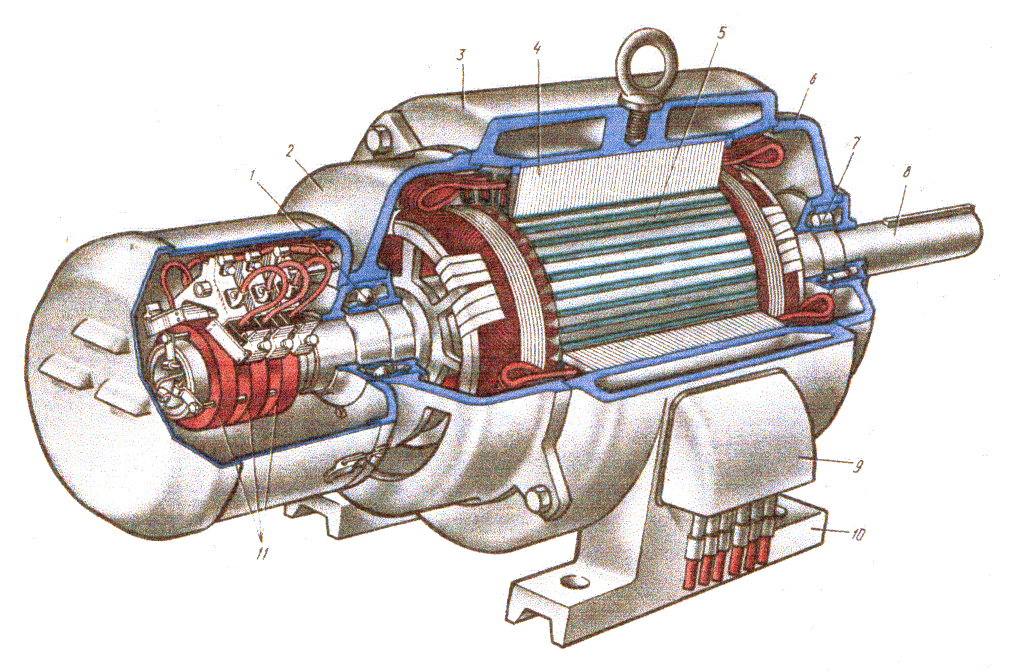 В качестве примера подобных приводных систем можно рассматривать:
В качестве примера подобных приводных систем можно рассматривать:
• маслонасосы смазки подшипников турбогенераторов;
• механизмы турбогенераторов, поддерживающие вращения ротора после прекращения подачи пара в турбину;
• вентиляторы подачи выхлопных газов к дымоходам;
• мазутные насосы;
• циркуляционные насосы, водяные насосы, пополняющие котлы и т. п.
Одним из вариантов решения проблемы гарантированного электроснабжения вышеупомянутых приводных систем является использование двигателей постоянного тока с электронными регуляторами и резервным питанием от аккумуляторных батарей. К сожалению, существующие недостатки двигателей постоянного тока исключают повсеместное применение этих систем. К этим недостаткам относятся:
• большие габариты, а также стоимость двигателя постоянного тока по отношению к асинхронному двигателю;
• ограниченный срок службы из‑за износа коллектора и потребность в обслуживании;
• искрение коллектора.
Последний недостаток особенно нужно брать во внимание, когда двигатель используется в приводе масляных насосов или работает вблизи или внутри взрывоопасных производственных зон.
Этих недостатков лишена система, построенная на основе асинхронного двигателя и системы FAT, схема которой изображена на рисунке 2a.
В нормальном состоянии двигатель запитан от электрической сети через выпрямитель и преобразователь DC/AC. При исчезновении напряжения в электрической сети двигатель через этот же преобразователь бесперебойно переходит на питание от аккумуляторной батареи. Кроме того, при включении FAT обеспечивает плавный пуск двигателя за счет автоматического регулирования частоты напряжения питания двигателя, в результате чего отсутствуют пусковые токи и перегрузка силовых цепей на выходе FAT.
Представленная на рисунке 2а схема является стандартной схемой системы FAT. По желанию заказчика APS Energia может расширить функции системы, как показано на рисунках 2б и 2в.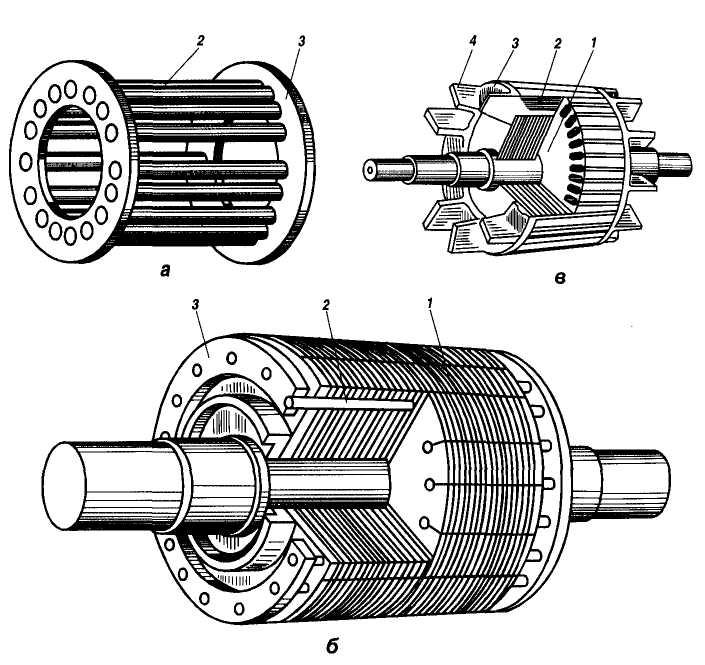
Данная система обеспечивает гарантированное питание дополнительных потребителей за счет применения второго инвертора.
В данной системе возможность регулирования частоты напряжения, питающего двигатель, позволяет регулировать производительность насоса. Это обеспечивает стабилизацию давления или расхода в системе, к которой подключен насос.
Преимущества использования
системы FAT производства APS Energia
В качестве двигателя приводной системы используется очень простой и дешевый асинхронный электродвигатель.
В сети отсутствуют броски тока, потребляемого системой FAT при пуске двигателя. Рисунок 4б представляет запуск двигателя насоса, запитанного от системы FAT. Пусковой ток двигателя равен номинальному току, но при этом двигатель сразу после пуска развивает максимальный момент на валу. Данный режим работы достигается за счет автоматического регулирования частоты и напряжения питания на выходе FAT. Это значительно облегчает запуск любого двигателя, а особенно тяжелый запуск двигателя, например запуск мазутного насоса зимой. Для сравнения, момент на валу и протекание тока в двигателе, запитанном от электрической сети или от стандартного UPS, представлены на рисунке 4а.
Это значительно облегчает запуск любого двигателя, а особенно тяжелый запуск двигателя, например запуск мазутного насоса зимой. Для сравнения, момент на валу и протекание тока в двигателе, запитанном от электрической сети или от стандартного UPS, представлены на рисунке 4а.
Путем подбора емкости аккумуляторной батареи в системе FAT обеспечивается требуемое время работы потребителей во время аварии в сети.
Путем введения в систему FAT обратной связи от приводной системы, например сигналов от датчиков давления или расхода трубопровода, можно легко регулировать параметры установок, в которых работают насосы, приводом которых являются асинхронные двигатели (регулируемая частота выходного напряжения FAT).
Путем установки дополнительных элементов в систему FAT:
• появляется возможность запитать дополнительных потребителей стабильным переменным напряжением;
• после запуска и синхронизации с напряжением сети двигатель, питающийся от FAT, может быть переключен на питание от электрической сети.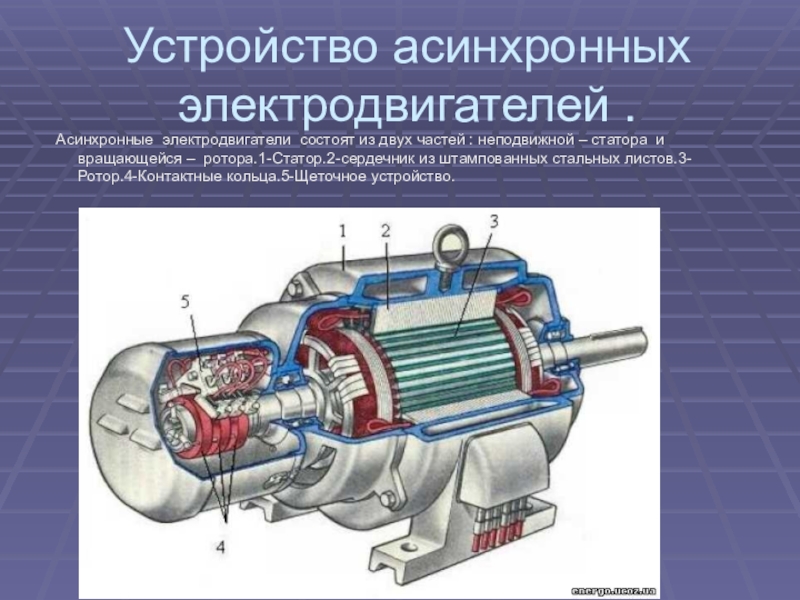 При исчезновении напряжения в сети FAT выполнит обратное переключение и обеспечит работу двигателя от аккумуляторных батарей. Данное решение аналогично функции By-pass, используемой в стандартном UPS.
При исчезновении напряжения в сети FAT выполнит обратное переключение и обеспечит работу двигателя от аккумуляторных батарей. Данное решение аналогично функции By-pass, используемой в стандартном UPS.
Путем установки дополнительного программатора система FAT может обеспечить, при больших мощностях и стартовых нагрузках, запуск двигателя в запрограммированном под его индивидуальные параметры режиме.
типов и удивительных применений асинхронного двигателя
Асинхронные машины — это наиболее часто используемый тип двигателя, используемый в жилых, коммерческих и промышленных условиях. В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора.
Принси А.Дж |
04 июня 2020 г.
Асинхронный двигатель — это обычно используемый электродвигатель переменного тока. В асинхронном двигателе электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. Ротор асинхронного двигателя может быть ротором с короткозамкнутым ротором или ротором с обмоткой.
Используемые в различных приложениях асинхронные двигатели также называются асинхронными двигателями. Это связано с тем, что асинхронный двигатель всегда работает на более низкой скорости, чем синхронная скорость. Скорость вращающегося магнитного поля в статоре называется синхронной скоростью.
Асинхронные машины являются наиболее часто используемым типом двигателя, который до сих пор использовался в жилых, коммерческих и промышленных условиях. Характерные особенности этих трехфазных двигателей переменного тока:
- Простая и грубая конструкция
- Доступная цена и низкие эксплуатационные расходы
- Высокая надежность и высокий профессионализм
- Не требует дополнительного пускового двигателя и не требует синхронизации
Два типа асинхронных двигателей
Однофазный асинхронный двигатель
Однофазный асинхронный двигатель не запускается самостоятельно. По основной обмотке протекает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый и простой в обслуживании механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины классифицируются по-разному. Это двигатели с экранированными полюсами, расщепленные фазы и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с конденсатором, работают с конденсатором и имеют двигатели с постоянным конденсатором.
По основной обмотке протекает спорадический ток, когда двигатель подключен к однофазному источнику питания. Вполне логично, что самый дешевый и простой в обслуживании механизм сортировки должен использоваться наиболее регулярно. В зависимости от способа запуска эти машины классифицируются по-разному. Это двигатели с экранированными полюсами, расщепленные фазы и конденсаторные двигатели. Кроме того, конденсаторные двигатели запускаются с конденсатором, работают с конденсатором и имеют двигатели с постоянным конденсатором.
В этих однофазных двигателях пусковая обмотка может иметь последовательный конденсатор и центробежный выключатель.Когда подается напряжение питания, ток в основной обмотке удерживает напряжение питания из-за импеданса основной обмотки. А ток в пусковой обмотке опережает/отстает, напряжение питания зависит от импеданса пускового механизма. Угол между двумя обмотками является достаточной разностью фаз, чтобы обеспечить вращающееся магнитное поле для создания пускового момента.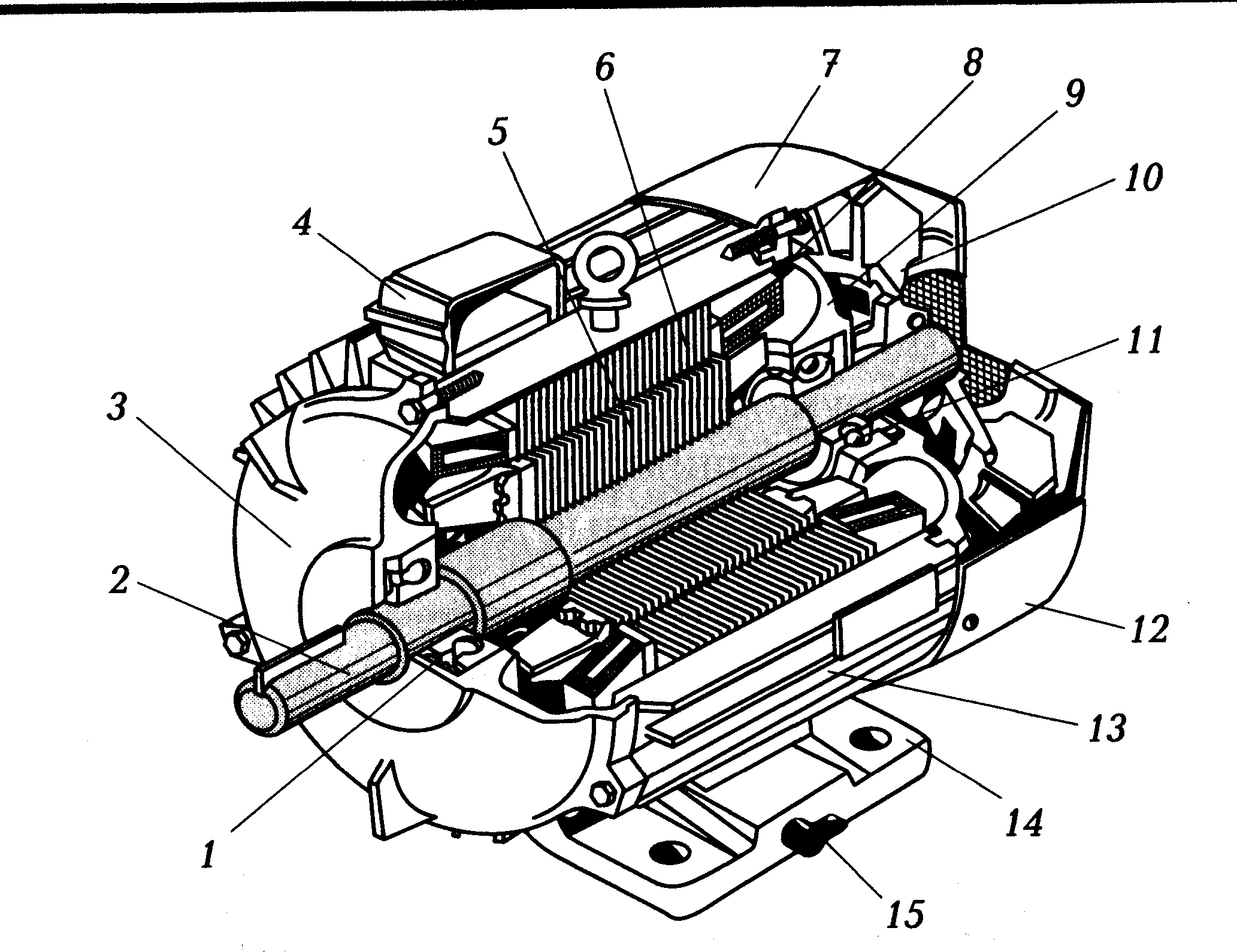 В момент, когда двигатель достигает 70-80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку.
В момент, когда двигатель достигает 70-80% синхронной скорости, центробежный переключатель на валу двигателя размыкается и отключает пусковую обмотку.
Применение однофазных асинхронных двигателей
Однофазные асинхронные двигатели используются в устройствах малой мощности. Эти двигатели широко используются в быту и промышленности. Ниже перечислены некоторые приложения:
- Насосы
- Компрессоры
- Маленькие вентиляторы
- Мешалки
- Игрушки
- Высокоскоростные пылесосы
- Электробритвы
- Сверлильные станки
Трехфазный асинхронный двигатель:
Будучи самозапускающимися, трехфазные асинхронные двигатели не используют пусковую обмотку, центробежный переключатель, конденсатор или другое пусковое устройство.Трехфазные асинхронные двигатели переменного тока имеют различное применение в коммерческих и промышленных целях. Трехфазные асинхронные двигатели бывают двух типов: с короткозамкнутым ротором и с контактным кольцом. Особенности, которые делают двигатели с короткозамкнутым ротором широко применимыми, в основном заключаются в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактными кольцами могут иметь высокий пусковой момент.
Особенности, которые делают двигатели с короткозамкнутым ротором широко применимыми, в основном заключаются в их простой конструкции и прочной конструкции. С внешними резисторами двигатели с контактными кольцами могут иметь высокий пусковой момент.
Трехфазные асинхронные двигатели широко используются в бытовых и промышленных устройствах, поскольку они имеют прочную конструкцию, практически не требуют обслуживания, сравнительно дешевле и требуют питания только статора.
Применение трехфазного асинхронного двигателя
- Лифты
- Краны
- Подъемники
- Вытяжные вентиляторы большой мощности
- Привод токарных станков
- Дробилки
- Маслоэкстракционные мельницы
- Текстиль и др.
Модель динамики трехфазной асинхронной машины, также известной как асинхронная машина, в единицах СИ или о.е.
Следует ли представлять крутящий момент, приложенный к валу или ротору
скорость в качестве ввода Simulink ® блока или для представления вала машины с помощью
Вращающийся механический порт Simscape™.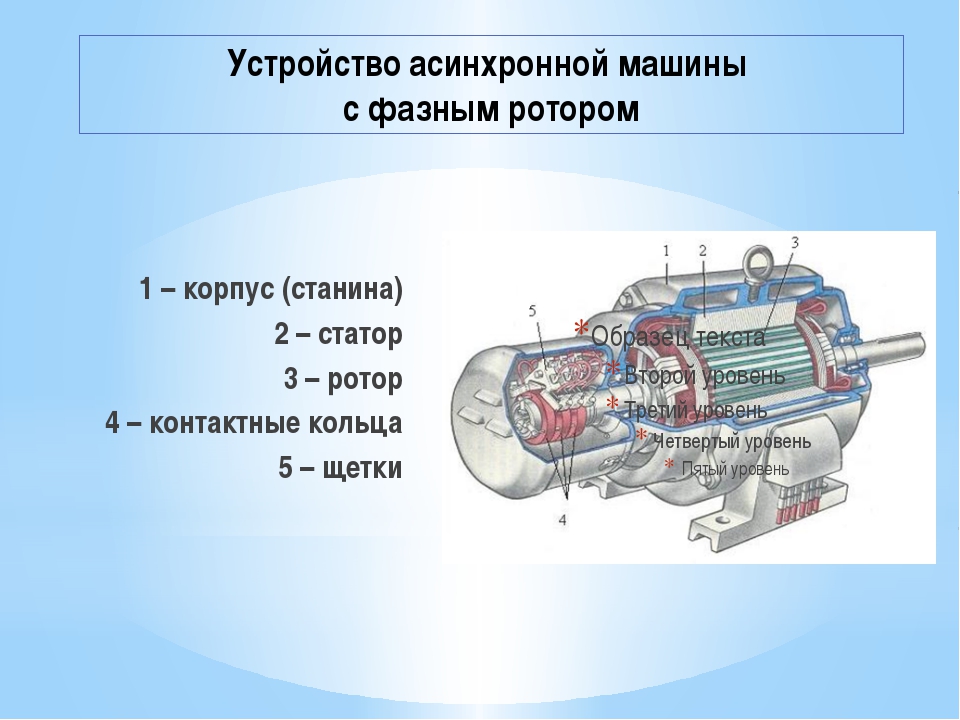
Выберите Torque Tm , чтобы указать входной крутящий момент в Нм или в о.е.
и открыть порт Tm . Скорость машины
определяется инерцией машины Дж (для СИ
машина) или постоянная инерции H (для машины pu)
и разницей между приложенным механическим крутящим моментом Tm и внутренний электромагнитный крутящий момент, Те . Когда скорость положительна, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Speed w , чтобы указать вход скорости в
рад/с или в pu, и открыть порт w . Машина
задана скорость и механическая часть модели (машина
инерция Дж ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать соединение жесткого вала в мотор-генераторной установке.
когда в машине 2 пренебрегают моментом трения. Выходная скорость
машина 1 (двигатель) подключена к входу скорости машины 2 (двигатель).
генератор), в то время как выход электромагнитного крутящего момента машины 2 Te применяется к механическому вводу крутящего момента Tm машины 1. Фактор кВт учитывает
единицы скорости обеих машин (рад/с или о.е.) и передаточное отношение коробки передач w2/w1.
Коэффициент КТ учитывает единицы крутящего момента обеих машин (Н.м
или pu) и рейтинги машины. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости
машина 1 и должна быть добавлена к машине 1 инерции Дж1 .
Выходная скорость
машина 1 (двигатель) подключена к входу скорости машины 2 (двигатель).
генератор), в то время как выход электромагнитного крутящего момента машины 2 Te применяется к механическому вводу крутящего момента Tm машины 1. Фактор кВт учитывает
единицы скорости обеих машин (рад/с или о.е.) и передаточное отношение коробки передач w2/w1.
Коэффициент КТ учитывает единицы крутящего момента обеих машин (Н.м
или pu) и рейтинги машины. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости
машина 1 и должна быть добавлена к машине 1 инерции Дж1 .
Выберите Механический вращательный порт , чтобы открыть механический вращательный порт Simscape, S , который
позволяет вам соединить вал машины с другими блоками Simscape, у которых есть механические порты вращения.
На рисунке показано, как подключить Ideal Torque
Исходный блок из библиотеки Simscape для вала машины, чтобы представить машину в
в режиме двигателя или в режиме генератора, когда скорость вращения ротора
положительный.
Трехфазный асинхронный двигатель
1. Чугунный корпус, прочный, корпус изготовлен из высокопрочной стальной инструментальной отливки, а производственный процесс превосходен. Установочные размеры и уклон дороги соответствуют стандартам IEC.
2. Двигатель эффективен, энергосберегающий, с низким уровнем шума, небольшой вибрацией, долгим сроком службы, простым обслуживанием, большим крутящим моментом двигателя, стабильной и надежной работой, хорошими пусковыми характеристиками.
3. Двигатель используется в широком диапазоне, широко используется в станках, вентиляторах, насосах, компрессорах и транспорте, сельском хозяйстве, промышленности и другом механическом вращающемся оборудовании.Трехфазный асинхронный двигатель серии
Y разработан с использованием новой технологии. Полностью закрытый двигатель, режим охлаждения с внешним вентилятором и конструкция с короткозамкнутым ротором. Полезная модель имеет преимущества нового дизайна, красивого внешнего вида, низкого уровня шума, высокой эффективности, высокого крутящего момента, хороших пусковых характеристик, компактной конструкции, удобного использования и обслуживания и т. п. В двигателе используется изоляция класса F, а его режущая конструкция оценивается в соответствии с международной структурой изоляции, что значительно повышает надежность и общую безопасность двигателя.
п. В двигателе используется изоляция класса F, а его режущая конструкция оценивается в соответствии с международной структурой изоляции, что значительно повышает надежность и общую безопасность двигателя.
Параметры продукта
Номер рамы: 80-355
Диапазон мощности: 0,75-315 кВт
Номинальная частота: 50/60 Гц
Напряжение: 380 В, 40 В 415 В, 660 В, 1140 В и т. д.)
Степень защиты двигателя: IP54, IP55
Способ охлаждения: IC411,
Система непрерывной работы: S1:,
Способ подключения двигателя: мощность не более 3 кВт для соединения Y метод, а 4KW или более высокая спецификация — это метод подключения △.
Может эксплуатироваться непрерывно при температуре окружающей среды не выше 40 °C. Он может быть изготовлен в виде специального двигателя для редуктора, специального двигателя для водяного насоса, двухвального удлинительного двигателя и специального установочного двигателя в соответствии с требованиями пользователя. Продукт используется в различных областях народного хозяйства, таких как станки, насосы, вентиляторы, компрессоры, а также может использоваться в транспорте, смешивании, полиграфии, сельскохозяйственной технике, пищевых продуктах и других местах, не содержащих легковоспламеняющихся, взрывоопасных или агрессивные газы.
Продукт используется в различных областях народного хозяйства, таких как станки, насосы, вентиляторы, компрессоры, а также может использоваться в транспорте, смешивании, полиграфии, сельскохозяйственной технике, пищевых продуктах и других местах, не содержащих легковоспламеняющихся, взрывоопасных или агрессивные газы.
Характеристика продукта
(1) Внешний контур рамы трехфазного асинхронного двигателя серии Y имеет квадратную и круглую форму, радиатор расположен вертикально и параллельно горизонтально, все они выполнены из чугуна. Кроме того, H63~112 также имеет литой корпус из алюминиевого сплава.
(2) Трехфазный асинхронный двигатель серии Y имеет неглубокую конструкцию торцевой крышки, что увеличивает количество и размер внутренних ребер жесткости, все они имеют конструкцию из чугуна, а H63~112 также имеет конструкцию из литого под давлением алюминиевого сплава.Для удобства пользователей в использовании и капитальном ремонте, h280 и выше добавлено устройство непрерывной смазки.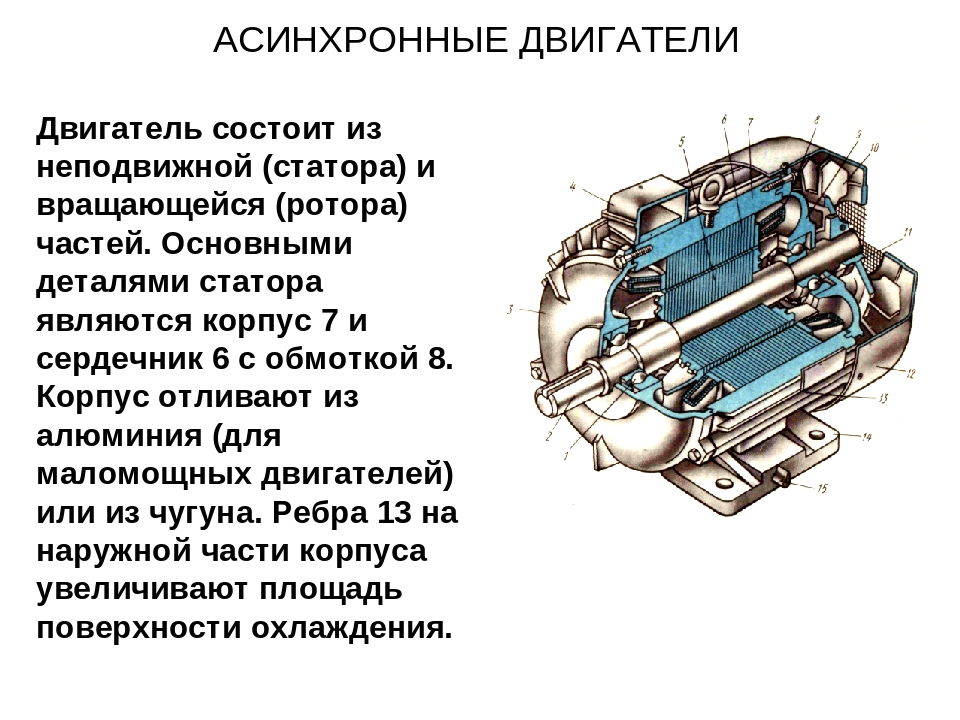
(3). Класс защиты распределительной коробки IP55. Для уменьшения веса двигателя распределительная коробка H63~280 отлита под давлением из алюминиевого сплава (также доступны чугунные отливки), а для H415~355 используются чугунные отливки. В коробке есть специальное заземляющее устройство. Монтажное положение устройства тепловой защиты считается для h260 и выше. Входное отверстие питания имеет двойное входное отверстие и имеет две уплотнительные конструкции: одна — уплотнительная крышка, а другая — уплотнительная крышка.Тип уплотнения замка. Распределительная коробка обычно расположена в верхней части основания и может быть проложена со всех сторон. Кроме того, соединительная коробка основания из чугуна H80~355 также может располагаться сбоку от основания.
Использование продукта
Моторная продукция, производимая и продаваемая нашей компанией, используется во многих отраслях, таких как электроэнергетика, горнодобывающая промышленность, металлургия, нефтехимия, водное хозяйство, транспорт, строительные материалы и многие другие отрасли.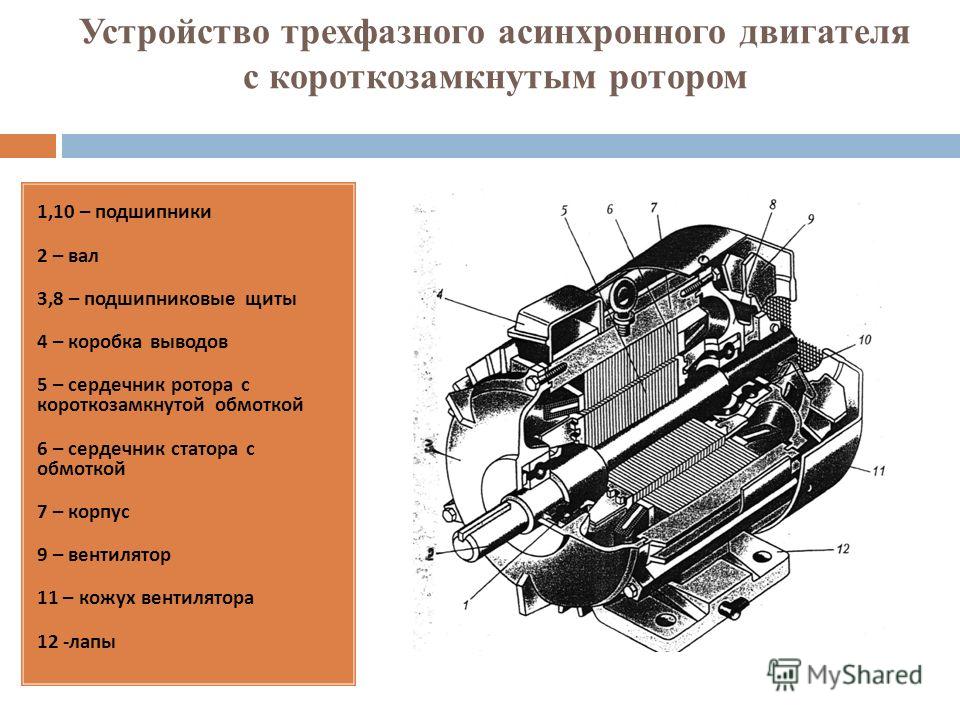 .Оборудование для двигателя насос, станок, вентилятор, мельница, дробилка, прокатный стан, компрессор и многое другое промышленное оборудование.
.Оборудование для двигателя насос, станок, вентилятор, мельница, дробилка, прокатный стан, компрессор и многое другое промышленное оборудование.
Основной технологический процесс двигателя
Статор двигателя: обработка корпуса → штамповочный пресс → посадка железного сердечника → изготовление катушки → плетение → сушка краски погружением → литой алюминий с железным сердечником → вал струны ротора → плетение → сушка краски погружением → динамическая балансировка
Сборка двигателя: сборка ротора статора → машинное испытание → окраска внешнего вида двигателя → хранение упаковки
Почему выбирают нас (наше преимущество в обслуживании)
1.Профессиональный поставщик услуг по производству двигателей;
2. Надежная система управления качеством продукции и сертификации;
3. Иметь профессиональную команду по продажам и техническому обслуживанию;
4. Двигатель имеет совершенный технологический процесс и высокую механическую способность обработки;
5. Система технического обслуживания продукта высокого стандарта;
Система технического обслуживания продукта высокого стандарта;
6, добросовестность и взаимная выгода, хорошая гарантия кредита.
Асинхронные двигатели переменного тока | Как работают двигатели переменного тока
Асинхронные двигатели переменного тока | Как работают двигатели переменного тока — объясните это РекламаКриса Вудфорда.Последнее обновление: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, вероятно, да и нет! Хотя многие из нас узнали, как
основные моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из
двигатели, которые мы используем каждый день — во всем, от заводских машин до
электрички — вообще так не работают. Что за книги
расскажите нам о простых двигателях постоянного тока (DC), которые имеют
петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни,
большинство мощных двигателей используют переменный ток (AC) и
работают совершенно по-другому: это то, что мы называем индукционными
двигатели, и они весьма изобретательно используют вращающееся магнитное поле. Давайте посмотрим поближе!
Давайте посмотрим поближе!
Фото: Обычный асинхронный двигатель переменного тока со снятым корпусом и ротором, видны медные обмотки катушек, составляющих статор (статическая неподвижная часть двигателя). Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса предоставлено Министерством энергетики США/NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, описанные в научных книгах, основаны на
кусок проволоки, согнутый в прямоугольную петлю, которая подвешивается между
полюса магнита.(Физики назвали бы это
проводник с током, находящийся в магнитном поле.) Когда
вы подключаете такой провод к батарее, через него протекает постоянный ток, создавая вокруг него временное магнитное поле. Это временное поле
отталкивает исходное поле от постоянного магнита, в результате чего проволока
перевернуть. Обычно провод останавливается в этой точке, а затем снова переворачивается,
но если мы используем остроумное вращающееся соединение
называется коммутатором, мы можем менять направление тока каждый раз, когда
проволока переворачивается, и это означает, что проволока будет продолжать вращаться в
в том же направлении, пока течет ток.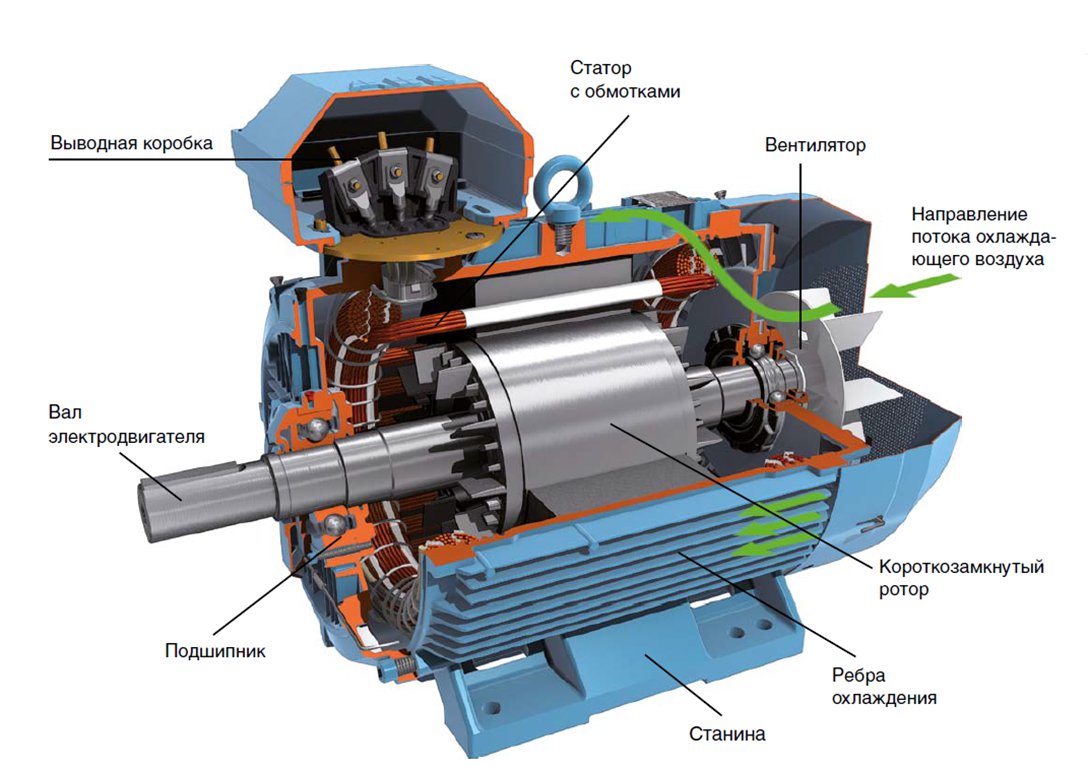 Это
Суть простого электродвигателя постоянного тока, который был задуман в
1820-е годы Майкла Фарадея и
превратилось в практическое изобретение о
десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Это
Суть простого электродвигателя постоянного тока, который был задуман в
1820-е годы Майкла Фарадея и
превратилось в практическое изобретение о
десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Работа: Электродвигатель постоянного тока основан на петле из проволоки, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты коммутатора) меняют направление электрического тока каждый раз, когда провод переворачивается, благодаря чему он вращается в том же направлении.
Прежде чем мы перейдем к двигателям переменного тока, давайте быстро
обобщить, что здесь происходит. В двигателе постоянного тока магнит (и его
магнитное поле) фиксируется на месте и образует внешнюю, статическую часть
двигатель (статор), а катушка провода, несущая электрический
ток формирует вращающуюся часть двигателя
(ротор). Магнитное поле исходит от статора, который представляет собой
постоянным магнитом, пока вы подаете электроэнергию на катушку, которая
составляет ротор.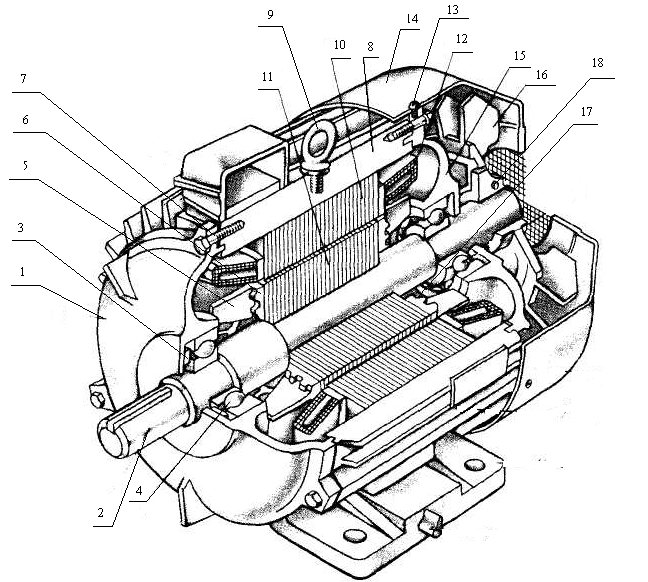 Взаимодействие между постоянными магнитными
поле статора и временное магнитное поле, создаваемое ротором
что заставляет двигатель крутиться.
Взаимодействие между постоянными магнитными
поле статора и временное магнитное поле, создаваемое ротором
что заставляет двигатель крутиться.
Как работает двигатель переменного тока?
В отличие от игрушек и фонариков, в большинстве домов, офисов, заводы и другие здания не питаются от маленьких батареек: они питаются не от постоянного тока, а от переменного (AC), который меняет свое направление примерно 50 раз в секунду (с частотой 50 Гц). Если вы хотите, чтобы двигатель работал от бытовой сети переменного тока, вместо батареи постоянного тока нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов.
расположены снаружи (составляя статор),
которые предназначены для создания вращающегося магнитного поля.Внутри статора есть сплошная металлическая ось, проволочная петля,
катушка, беличья клетка из металлических стержней и межсоединений
(например, вращающиеся клетки, которые люди иногда развлекают домашними мышами),
или какая-либо другая свободно вращающаяся металлическая деталь, которая может проводить
электричество.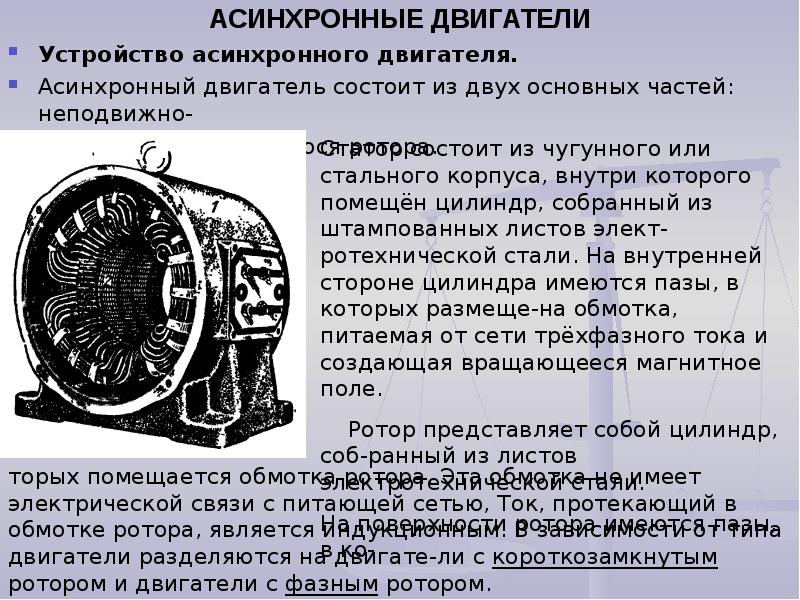 В отличие от двигателя постоянного тока, где вы отправляете энергию на внутреннюю
ротор, в двигателе переменного тока вы отправляете мощность на внешние катушки, которые составляют
статор. Катушки запитываются попарно, последовательно,
создавая магнитное поле, которое вращается вокруг двигателя снаружи.
В отличие от двигателя постоянного тока, где вы отправляете энергию на внутреннюю
ротор, в двигателе переменного тока вы отправляете мощность на внешние катушки, которые составляют
статор. Катушки запитываются попарно, последовательно,
создавая магнитное поле, которое вращается вокруг двигателя снаружи.
Фото: Статор создает магнитное поле с помощью плотно намотанных катушек из медной проволоки, которые называются обмотками. Когда электродвигатель изнашивается или перегорает, один из вариантов — заменить его другим двигателем. Иногда проще заменить обмотки двигателя новым проводом — квалифицированная работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри
магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому
согласно законам электромагнетизма (закону Фарадея, если быть точным), магнитное поле производит (или индуцирует, используя термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи. В любом случае индуцированный ток производит свое
собственного магнитного поля и, согласно другому закону электромагнетизма
(закон Ленца) пытается остановить то, что его вызывает —
вращающееся магнитное поле — также вращением.(Вы можете думать о роторе
отчаянно пытаясь «догнать» вращающееся магнитное поле, чтобы устранить
разница в движении между ними.) Электромагнитная индукция является ключом к тому, почему такой двигатель вращается, и поэтому он называется асинхронным двигателем.
Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи. В любом случае индуцированный ток производит свое
собственного магнитного поля и, согласно другому закону электромагнетизма
(закон Ленца) пытается остановить то, что его вызывает —
вращающееся магнитное поле — также вращением.(Вы можете думать о роторе
отчаянно пытаясь «догнать» вращающееся магнитное поле, чтобы устранить
разница в движении между ними.) Электромагнитная индукция является ключом к тому, почему такой двигатель вращается, и поэтому он называется асинхронным двигателем.
Фото: Эффективный асинхронный двигатель переменного тока. Фото Аль Пуэнте любезно предоставлено НРЕЛ.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, все прояснить:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно питаются от источника переменного тока (не показан, но подключен к выводам справа). Две красные катушки соединены последовательно и запитываются вместе, а две синие
катушки подключены одинаково. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается резко (как показано на этой анимации), а плавно возрастает и падает в форме синусоиды: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (на 90° не совпадают по фазе).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитному полю внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Поскольку магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в том же направлении и (теоретически) почти с той же скоростью.
 Две красные катушки соединены последовательно и запитываются вместе, а две синие
катушки подключены одинаково. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается резко (как показано на этой анимации), а плавно возрастает и падает в форме синусоиды: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (на 90° не совпадают по фазе).
Две красные катушки соединены последовательно и запитываются вместе, а две синие
катушки подключены одинаково. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается резко (как показано на этой анимации), а плавно возрастает и падает в форме синусоиды: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (на 90° не совпадают по фазе).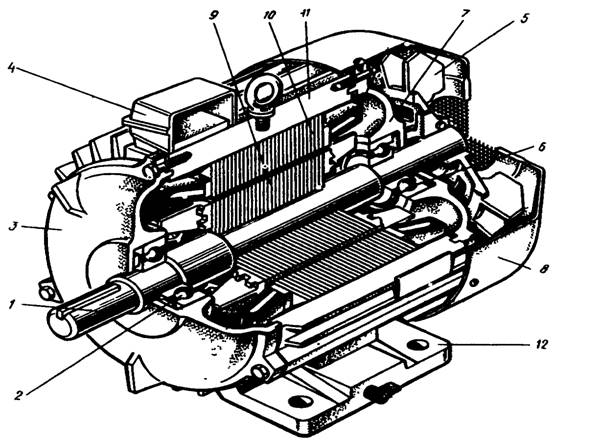
Асинхронные двигатели на практике
Что управляет скоростью двигателя переменного тока?
Фото: Частотно-регулируемый двигатель.Фото Уоррена Гретца предоставлено НРЕЛ.
В синхронных двигателях переменного тока ротор вращается точно с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора асинхронного двигателя зависит от частоты сети переменного тока и количества витков, составляющих статор, и при отсутствии нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (что бы он ни приводил) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «скольжение» между скоростью вращающегося магнитного поля и фактической скоростью вращения ротора. Чтобы контролировать скорость двигателя переменного тока (заставить его работать быстрее или медленнее), вы должны увеличить или уменьшить частоту источника переменного тока, используя так называемый
частотно-регулируемый привод. Таким образом, когда вы регулируете скорость чего-то вроде фабричной машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая повышает или понижает частоту тока, приводящего в движение двигатель.
Таким образом, когда вы регулируете скорость чего-то вроде фабричной машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете цепью, которая повышает или понижает частоту тока, приводящего в движение двигатель.
Что такое «фаза» двигателя переменного тока?
Мы не обязательно должны управлять ротором с четырьмя катушками (две противоположные пары), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать двигатель. Количество отдельных электрических токов, питающих катушки независимо, не синхронно, известно как фаза двигателя, поэтому показанная выше конструкция представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не синхронно в двух парах). ).В трехфазном двигателе у нас может быть три катушки, расположенные вокруг статора треугольником, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: трехфазный двигатель, работающий от трех токов (обозначен красным, зеленым и синие пары катушек), сдвинутые по фазе на 120°.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются выходят из строя и время от времени нуждаются в замене. Трение между щетками и коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Художественное произведение: Электродвигатели чрезвычайно эффективны, обычно преобразуя около 85 процентов поступающей электроэнергии в полезную, исходящую механическую работу. Несмотря на это, внутри обмоток по-прежнему теряется довольно много энергии в виде тепла, поэтому двигатели могут сильно нагреваться. Большинство промышленных двигателей переменного тока имеют встроенную систему охлаждения. Внутри корпуса есть вентилятор, прикрепленный к валу ротора (на противоположном конце оси, приводящей в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в мотор, обдувая его снаружи корпуса мимо ребер радиатора. Если вы когда-нибудь задумывались, почему у электродвигателей такие выступы снаружи (как вы можете видеть на верхнем фото на этой странице), то причина в том, что они охлаждают двигатель.
Несмотря на это, внутри обмоток по-прежнему теряется довольно много энергии в виде тепла, поэтому двигатели могут сильно нагреваться. Большинство промышленных двигателей переменного тока имеют встроенную систему охлаждения. Внутри корпуса есть вентилятор, прикрепленный к валу ротора (на противоположном конце оси, приводящей в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в мотор, обдувая его снаружи корпуса мимо ребер радиатора. Если вы когда-нибудь задумывались, почему у электродвигателей такие выступы снаружи (как вы можете видеть на верхнем фото на этой странице), то причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в движение, он вращается с
постоянная скорость, если вы не используете частотно-регулируемый привод; скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушек. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое превращает постоянный ток в переменный).Это потому, что им нужно переменное магнитное поле, чтобы вращать ротор.
Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушек. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое превращает постоянный ток в переменный).Это потому, что им нужно переменное магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Работа: Оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Это работает точно так же, как анимация выше, с двумя синими и двумя красными катушками, попеременно питаемыми генератором справа. Это произведение искусства взято из оригинального патента Теслы, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться самостоятельно в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком.
и плодовитый изобретатель, чей удивительный вклад в науку и технику
никогда не были полностью признаны.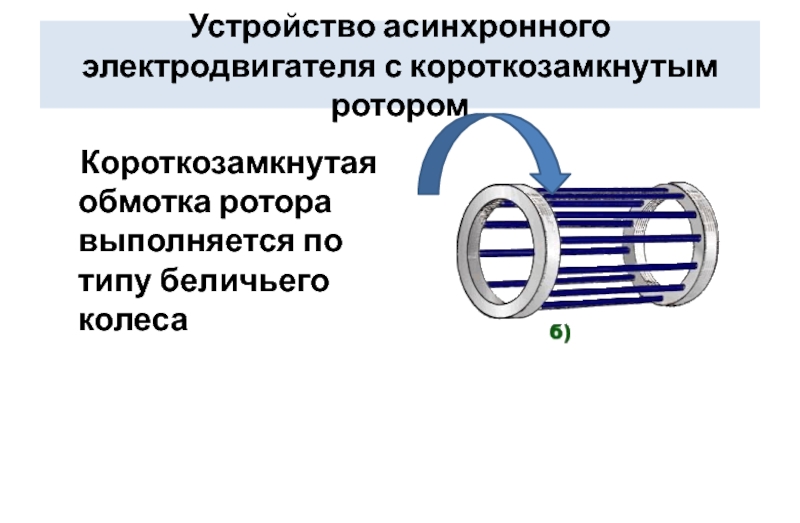 После того, как он прибыл в Соединенные Штаты в возрасте 28 лет, он начал
работал на знаменитого пионера электротехники Томаса Эдисона. Но двое мужчин выпали
катастрофически и вскоре стали заклятыми соперниками. Тесла твердо верил
что переменный ток (AC) намного превосходит постоянный ток (DC),
в то время как Эдисон думал об обратном. Со своим партнером Джорджем
Вестингауз, Тесла защищали переменный ток, а Эдисон
полны решимости управлять миром в округе Колумбия и придумывали всевозможные
рекламные трюки, чтобы доказать, что переменный ток слишком опасен для широкого использования
(изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и
даже убить слона Топси электрическим током, чтобы показать, насколько это смертельно и жестоко).Битва между этими двумя
очень разные взгляды на электроэнергию иногда называют Войной токов.
После того, как он прибыл в Соединенные Штаты в возрасте 28 лет, он начал
работал на знаменитого пионера электротехники Томаса Эдисона. Но двое мужчин выпали
катастрофически и вскоре стали заклятыми соперниками. Тесла твердо верил
что переменный ток (AC) намного превосходит постоянный ток (DC),
в то время как Эдисон думал об обратном. Со своим партнером Джорджем
Вестингауз, Тесла защищали переменный ток, а Эдисон
полны решимости управлять миром в округе Колумбия и придумывали всевозможные
рекламные трюки, чтобы доказать, что переменный ток слишком опасен для широкого использования
(изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и
даже убить слона Топси электрическим током, чтобы показать, насколько это смертельно и жестоко).Битва между этими двумя
очень разные взгляды на электроэнергию иногда называют Войной токов.
Несмотря на все (или худшие) усилия Эдисона, Тесла победил, и теперь электричество переменного тока обеспечивает большую часть энергии.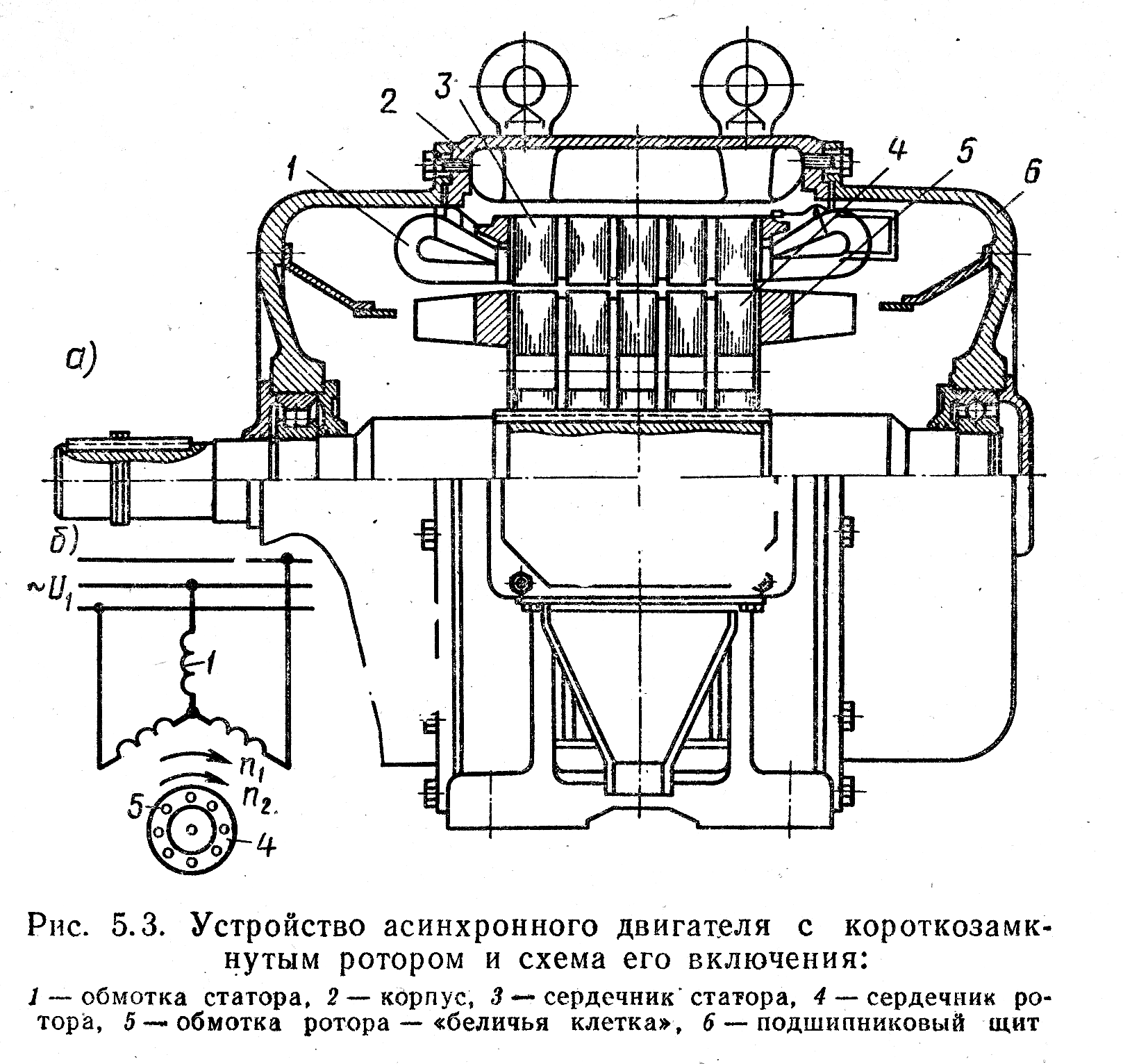 мира. Во многом поэтому многие электродвигатели,
электроприборы в наших домах, фабриках и офисах работают на переменном токе.
асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола
Тесла разработал в 1880-х годах (его патент, показанный здесь, был выдан в мае 1888 года).итальянский физик по имени
Галилео Феррарис самостоятельно пришел к той же идее примерно в то же время, но история обошлась с ним еще более жестоко, чем
Тесла и его имя теперь почти забыты.
мира. Во многом поэтому многие электродвигатели,
электроприборы в наших домах, фабриках и офисах работают на переменном токе.
асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола
Тесла разработал в 1880-х годах (его патент, показанный здесь, был выдан в мае 1888 года).итальянский физик по имени
Галилео Феррарис самостоятельно пришел к той же идее примерно в то же время, но история обошлась с ним еще более жестоко, чем
Тесла и его имя теперь почти забыты.
Узнать больше
На этом сайте
На других сайтах
Книги
Для читателей старшего возраста
Для юных читателей
- Электричество для молодых мастеров: веселые и простые проекты «Сделай сам», Марк де Винк.Maker Media/O’Reilly, 2017. Отличное практическое введение в электричество, включая пару заданий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем, Эд Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого контекста науки и техники. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателем постоянного тока и лучше всего подходит для детей в возрасте 11–14 лет.
- Сила и энергия Криса Вудфорда.Facts on File, 2004. Одна из моих книг, посвященная истории человеческих усилий по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: разработчик электроэнергии Криса Вудфорда, в книге «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008 г. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это, кажется, было доступно в Интернете по этой ссылке на Google Книги. Возраст 9–12 лет.
 Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого контекста науки и техники. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателем постоянного тока и лучше всего подходит для детей в возрасте 11–14 лет.
Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого контекста науки и техники. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателем постоянного тока и лучше всего подходит для детей в возрасте 11–14 лет.Патенты
Патенты предлагают более подробные технические детали и собственное понимание изобретателем своей работы.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381 968: Электромагнитный двигатель Николы Теслы, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2 959 721: Многофазные асинхронные двигатели Томас Х. Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным регулированием скорости.
- Патент США 4 311 932: Жидкостное охлаждение для асинхронных двигателей Раймонда Н. Олсона, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом, автор Umesh C. Gupta, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие веб-сайты
Статьи с этого веб-сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных произведений без разрешения, удаление этого или других уведомлений об авторских правах и/или нарушение смежных прав может повлечь за собой серьезные гражданские или уголовные санкции.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условия использования.
Подписывайтесь на нас
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее или рассказать о ней своим друзьям:
Цитировать эту страницу
Вудфорд, Крис. (2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html.[Доступ (вставьте дату здесь)]
Больше информации на нашем веб-сайте…
Новая упрощенная модель асинхронной машины с учетом частотной характеристики
При цифровом моделировании энергосистем следует учитывать частотную характеристику электрооборудования. Традиционная модель переходного процесса третьего порядка асинхронной машины исключает не только переходный процесс статора, но и частотные характеристики, что уменьшает область применения модели и приводит к большой ошибке при некоторых особых условиях. На основе физической эквивалентной схемы и модели Парка для асинхронных машин в этом исследовании предлагается новая модель асинхронной переходной машины третьего порядка с учетом частотной характеристики. В новых определениях переменных напряжения за реактивным сопротивлением переопределяются как линейное уравнение потокосцепления. Таким образом, уравнение напряжения ротора не связано с производными от частоты. Однако производные от частоты не всегда следует игнорировать при применении традиционной переходной модели третьего порядка.По сравнению с традиционной моделью переходного процесса третьего порядка новая упрощенная модель переходного процесса третьего порядка с учетом частотной характеристики является более точной без увеличения порядка и сложности. Результаты моделирования показывают, что новая модель переходного процесса третьего порядка для асинхронной машины подходит, эффективна и является более точной, чем широко используемая традиционная упрощенная модель переходного процесса третьего порядка в некоторых особых условиях с резкими колебаниями частоты.
На основе физической эквивалентной схемы и модели Парка для асинхронных машин в этом исследовании предлагается новая модель асинхронной переходной машины третьего порядка с учетом частотной характеристики. В новых определениях переменных напряжения за реактивным сопротивлением переопределяются как линейное уравнение потокосцепления. Таким образом, уравнение напряжения ротора не связано с производными от частоты. Однако производные от частоты не всегда следует игнорировать при применении традиционной переходной модели третьего порядка.По сравнению с традиционной моделью переходного процесса третьего порядка новая упрощенная модель переходного процесса третьего порядка с учетом частотной характеристики является более точной без увеличения порядка и сложности. Результаты моделирования показывают, что новая модель переходного процесса третьего порядка для асинхронной машины подходит, эффективна и является более точной, чем широко используемая традиционная упрощенная модель переходного процесса третьего порядка в некоторых особых условиях с резкими колебаниями частоты.
1. Введение
Падение напряжения является обычным явлением при отказе энергосистемы, тогда как системная частота остается постоянной в крупных энергосистемах. Следовательно, традиционное моделирование и симуляция энергосистем сосредоточены на характеристиках напряжения силового оборудования с меньшим вниманием к частотной характеристике. Однако при высоком уровне распространения распределенной генерации [1, 2] частота системы будет колебаться, когда существует случайный дисбаланс между выработкой электроэнергии и спросом.Например, сбой или внезапное изменение нагрузки в микросети [3–5] вызовет относительно большое колебание частоты, поскольку инерция системы мала. Кроме того, в некоторых изолированных сетях (например, в электросетях Синьцзяна и Хайнаня в Китае) системные сбои также вызывают проблемы с частотой [6–9]. Таким образом, частотная характеристика оборудования должна учитываться при моделировании и моделировании энергосистемы.
Асинхронные машины, которые содержат асинхронные асинхронные двигатели и асинхронные генераторы, являются важным оборудованием в энергосистемах. Динамическая нагрузка включает в себя асинхронные двигатели [6–15] и большое количество ветрогенераторов, таких как асинхронные генераторы или асинхронные генераторы с двойным питанием (DFIG) [16–22]. Модель электромеханического переходного процесса третьего порядка для асинхронных машин широко используется при моделировании энергосистем. Традиционная форма этой модели не может представить частотную характеристику асинхронных машин, потому что эта упрощенная модель только предполагает, что частота постоянна, и игнорирует первую производную частоты при выводе.Результаты моделирования приемлемы при использовании традиционной переходной модели третьего порядка в условиях незначительных флуктуаций частоты или без учета флуктуации частоты. Однако при изучении энергосистемы с высоким проникновением распределенной генерации использование традиционной переходной модели третьего порядка приведет к значительной ошибке в результате моделирования в отличие от полевых измерений. Моделирование нагрузки с учетом частоты и напряжения обсуждается в [8].
Динамическая нагрузка включает в себя асинхронные двигатели [6–15] и большое количество ветрогенераторов, таких как асинхронные генераторы или асинхронные генераторы с двойным питанием (DFIG) [16–22]. Модель электромеханического переходного процесса третьего порядка для асинхронных машин широко используется при моделировании энергосистем. Традиционная форма этой модели не может представить частотную характеристику асинхронных машин, потому что эта упрощенная модель только предполагает, что частота постоянна, и игнорирует первую производную частоты при выводе.Результаты моделирования приемлемы при использовании традиционной переходной модели третьего порядка в условиях незначительных флуктуаций частоты или без учета флуктуации частоты. Однако при изучении энергосистемы с высоким проникновением распределенной генерации использование традиционной переходной модели третьего порядка приведет к значительной ошибке в результате моделирования в отличие от полевых измерений. Моделирование нагрузки с учетом частоты и напряжения обсуждается в [8]. Усовершенствованное моделирование нагрузки на основе измерений может хорошо отражать динамические характеристики реальной нагрузки. Новое регулирование частоты ветряными турбинами (ВТ) на основе DFIG, используемое для координации инерционного управления, управления скоростью вращения ротора и управления углом тангажа, изучается в [23]. Скоординированное управление расширяет возможности регулирования частоты и гасит колебания частоты. Способность WT участвовать в первичном управлении частотой и предлагать первичный резерв обсуждается в [24], в которой также исследовались переходная поддержка частоты и постоянная частотная характеристика.
Усовершенствованное моделирование нагрузки на основе измерений может хорошо отражать динамические характеристики реальной нагрузки. Новое регулирование частоты ветряными турбинами (ВТ) на основе DFIG, используемое для координации инерционного управления, управления скоростью вращения ротора и управления углом тангажа, изучается в [23]. Скоординированное управление расширяет возможности регулирования частоты и гасит колебания частоты. Способность WT участвовать в первичном управлении частотой и предлагать первичный резерв обсуждается в [24], в которой также исследовались переходная поддержка частоты и постоянная частотная характеристика.
Для представления характеристик напряжения и частоты асинхронной машины во время моделирования в этой статье предлагается новая упрощенная переходная модель третьего порядка путем переопределения переменных и параметров традиционной модели. В этой новой упрощенной модели третьего порядка определение переходной переменной дает четкую физическую интерпретацию. Новая упрощенная модель третьего порядка может точно представить частотную характеристику асинхронных машин. Между тем эта переменная не повысит порядок и сложность модели.Наконец, результаты моделирования подтверждают эффективность и точность новой упрощенной переходной модели третьего порядка при моделировании энергосистемы.
Новая упрощенная модель третьего порядка может точно представить частотную характеристику асинхронных машин. Между тем эта переменная не повысит порядок и сложность модели.Наконец, результаты моделирования подтверждают эффективность и точность новой упрощенной переходной модели третьего порядка при моделировании энергосистемы.
2. Парковая модель асинхронной машины
На рис. 1 показаны схемы, применимые для анализа асинхронной машины. Цепи статора состоят из трехфазных обмоток , , и распределены в пространстве на 120° друг от друга. Цепи ротора содержат три распределенные обмотки , , и .
Пренебрегая насыщением, гистерезисом и вихревыми токами и предполагая чисто синусоидальное распределение волн потока, машинные уравнения можно записать следующим образом [25].
Уравнения напряжения статора и ротора задаются формулой
где представляет собой напряжение, представляет ток, представляет собой поток, связывающий обмотку, обозначенную нижним индексом, — сопротивление фазы статора, — сопротивление фазы ротора, а нижние индексы и — обмотки статора и ротора соответственно.
определяется как угол, на который ось фазной обмотки ротора опережает ось фазной обмотки статора в направлении вращения при постоянной угловой скорости ротора: и с постоянным проскальзыванием:
На рис. 2 видно, что электрическая угловая скорость системы отсчета и вращающейся системы отсчета составляет , ось обмотки ведет к оси обмотки в направлении вращения, а ось совпадает с осью фазной обмотки статора в начальный момент .
Применяя уравнение преобразования, получаем следующие выражения относительно преобразованных составляющих напряжения, потокосцепления и тока [25].
Уравнения напряжения статора:
уравнения напряжения ротора: Условия и напряжения трансформатора, аналогичные и .
Уравнения потокосцепления статора следующие:
Уравнения рассеяния потока ротора следующие: где и , где , и – утечки статора, ротора и взаимные индуктивности соответственно.
Исключив фазное напряжение и ток в пересчете на составляющие, получим
Крутящий момент воздушного зазора получается путем деления мощности, передаваемой через воздушный зазор, на скорость вращения ротора в механических радианах в секунду: где нижние индексы и обозначают ротор и статор соответственно.
3. Традиционная упрощенная модель асинхронной машины
За исключением переходных процессов статора, Следующие переменные и параметры [25] определяются как Переписав (7), получим
. Напряжение ротора составляющей (5) можно записать как
Из приведенного выше уравнения можно записать как Таким образом, (13) можно записать в виде
Аналогичным образом составляющая напряжения ротора определяется выражением
Этот термин обычно исключается при моделировании системы в предыдущих исследованиях, и уравнения модели переходного процесса асинхронной машины могут быть переписаны следующим образом:
По сравнению с (15) и (16) и исключены из (17), что указывает на то, что частота рассматривается как константа в переходной модели третьего порядка асинхронной машины.Однако это предположение приведет к ошибкам, поскольку частота значительно изменится.
4. Новая упрощенная модель асинхронной машины
4.1. Переопределение переменных и параметров
Чтобы представить эффект колебания частоты и сохранить простоту переходной модели асинхронной машины третьего порядка, переменные и параметры должны быть переопределены следующим образом:
По сравнению с (11) и имеют линейную зависимость с потокосцеплением, посредством чего исключаются угловые частоты , и .
4.2. Уравнения напряжения ротора
Из (12) и (18) напряжение ротора компонента можно записать как где Таким образом, (19) можно записать в виде
Исходя из аналогичного принципа, мы можем получить уравнение напряжения ротора компонента. Уравнения переходной модели асинхронной машины могут быть переписаны следующим образом: не появляется в процессе вывода, что указывает на то, что частота не исключается в новой упрощенной переходной модели третьего порядка.С новым определением не учитываются угловая частота, индуктивность и параметры переходной модели, которые могут лучше отражать физические характеристики асинхронной машины в модели.
4.3. Уравнения напряжения статора
Чтобы сократить уравнения и сделать модель подходящей для программы устойчивости, мы исключаем токи ротора и выражаем взаимосвязь между током статора и напряжением относительно напряжения после переходного реактивного сопротивления.Таким образом, из (12) и (6) получаем
Подставив приведенное выше уравнение вместо (4), уравнение напряжения статора компонента можно переписать как
Аналогичным образом можно получить составляющую уравнения напряжения статора, при этом уравнения напряжения статора можно записать в виде
Из (13) и (9) уравнение электромагнитного момента можно выразить как
4.
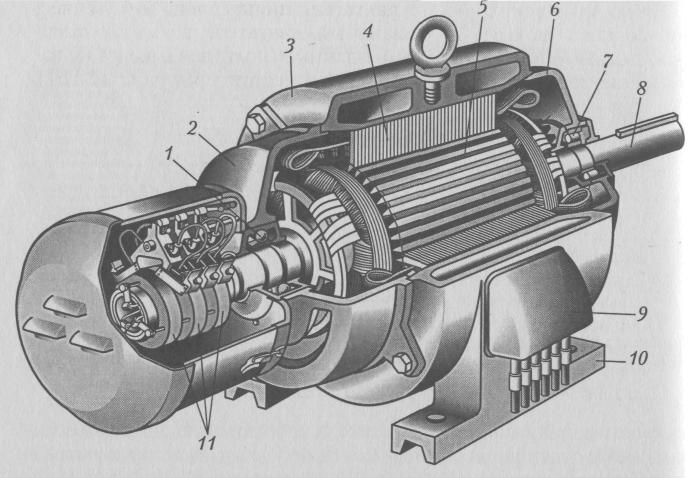 4. Уравнения модели в системной системе отсчета
4. Уравнения модели в системной системе отсчетаУравнения переходной модели должны быть преобразованы в общедоступную систему отсчета при моделировании системы.На рис. 2 показано соотношение между системой отсчета и системой отсчета с аналогичной угловой скоростью в . угол, на который ось а ведет ось а в направлении вращения. Уравнение преобразования В результате переходная модель получается следующим образом.
Уравнения переходного процесса:
уравнения напряжения статора:
уравнение электромагнитного момента:
уравнение ускорения ротора: где на единицу и – начальное скольжение асинхронной машины.Если асинхронная машина потребляет мощность, то ; в противном случае, если асинхронная машина производит энергию.
5. Анализ моделей
Известно, что асинхронные машины содержат асинхронные асинхронные двигатели и асинхронные генераторы; разница между ними заключается в уравнениях ускорения и напряжения ротора.
5.1. Асинхронный асинхронный двигатель Модель
Асинхронный двигатель — это обычная асинхронная машина, которая преобразует электрическую энергию в механическую на основе принципа электромагнитной индукции. Напряжение ротора асинхронного двигателя равно нулю, поэтому новая упрощенная переходная модель третьего порядка для асинхронного двигателя с учетом частотных характеристик показана следующим образом.
Напряжение ротора асинхронного двигателя равно нулю, поэтому новая упрощенная переходная модель третьего порядка для асинхронного двигателя с учетом частотных характеристик показана следующим образом.
Уравнения переходного процесса:
уравнение ускорения:
уравнения напряжения статора:
5.2. Асинхронный генератор Модель
Асинхронные генераторы широко используются в ветроэнергетике. Большинство ранних ветряных генераторов представляют собой генераторы WT с фиксированной скоростью, а индукционный генератор работает с постоянной скоростью.Использование генераторов WT с переменной скоростью и постоянной частотой, таких как DFIG, является основным направлением в недавно построенных ветряных электростанциях. Однако модели различных индукционных генераторов схожи, что можно записать следующим образом.
Уравнения переходного процесса:
уравнение ускорения:
уравнения напряжения статора: где и – эквивалентное напряжение ротора при следующих условиях: для генераторов ВТ с фиксированной скоростью – напряжение ротора, а для генераторов ВТ с переменной скоростью – постоянной частоты, которые могут подавать напряжение ротора через преобразователь на стороне ротора, – напряжение ротора .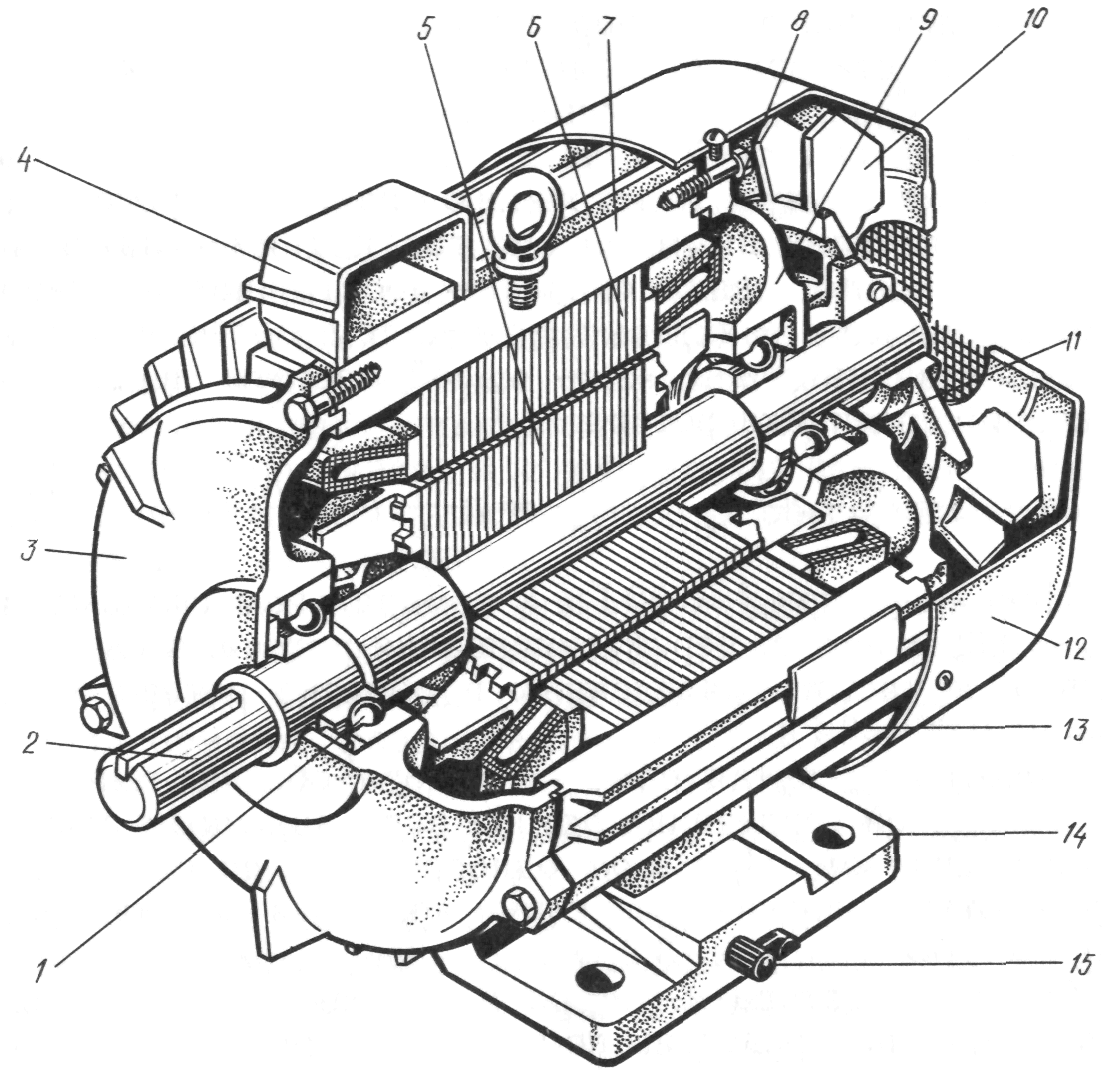
6. Анализ моделирования
Упрощенная энергосистема, содержащая составную нагрузку и ветрогенератор, как показано на рис. 3, построена в Matlab/Simulink для проверки производительности новой упрощенной модели асинхронной машины с учетом частотных характеристик. Таблицы 1 и 2 перечисляют параметры этой системы моделирования. Электросеть представляет собой изолированную энергосистему мощностью 300 кВт. Нагрузкой этой энергосистемы являются статическая нагрузка (ЗИП) и асинхронный асинхронный двигатель, потребляющие всю мощность, выдаваемую ветрогенератором при нормальной работе.Синхронный генератор используется в качестве преобразователя фазы для поддержания напряжения в системе. Для подачи реактивной мощности используются конденсаторы общей емкостью 75 кВАр.
| ||||||||||||||||||||||||||||||||||||||||||||||||
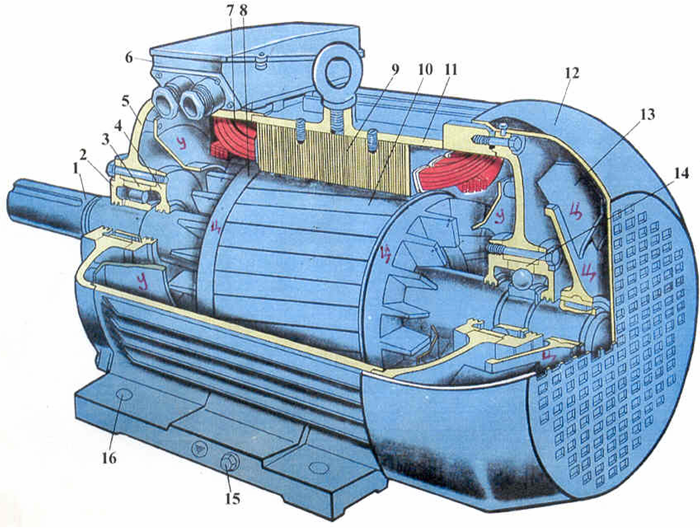 0717
0717
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
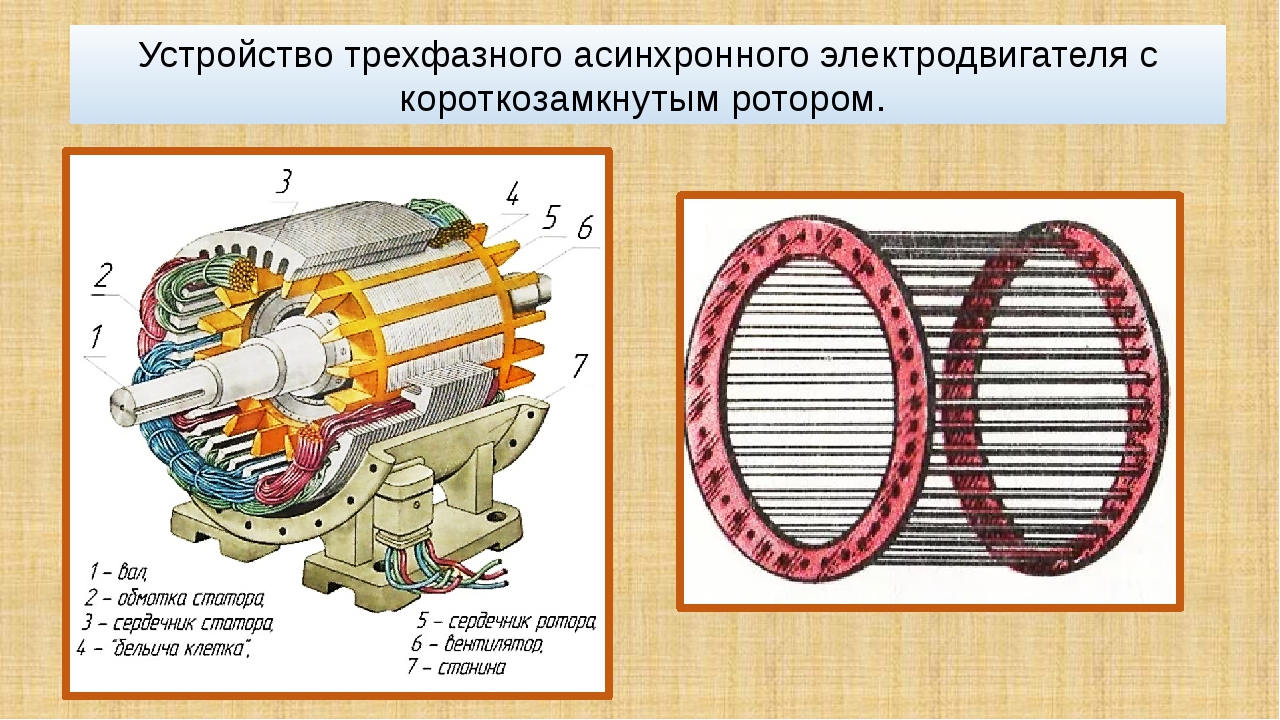 016
016 Отзывы новой упрощенной переходной модели третьего порядка асинхронной машины (асинхронного двигателя и ветрогенератора) при уменьшении скорости ветра и отказе электрической нагрузки. Во время возмущения выходная мощность ветрогенератора колеблется, как и потребляемая мощность двигателя машины. Энергосистема восстановит стабильность, когда помехи будут устранены. Он не может прийти к противоположным выводам с двумя моделями.
Во время возмущения выходная мощность ветрогенератора колеблется, как и потребляемая мощность двигателя машины. Энергосистема восстановит стабильность, когда помехи будут устранены. Он не может прийти к противоположным выводам с двумя моделями.
6.1. Случай A
В первом случае предполагается, что начальная нагрузка составляет 200 кВт, которая резко увеличивается до 300 кВт примерно за 0,2 с, а затем возвращается к 200 кВт. На рис. 4 показано, что частота системы снижается в ответ на резкое увеличение нагрузки, а производная частоты показана на рис. 5.Впоследствии система достигает новой стабильной рабочей точки, и частота медленно восстанавливается после явного колебания.
На рисунках 6, 7, 8 и 9 показано сравнение выходной активной и реактивной мощности традиционной упрощенной переходной модели третьего порядка, новой упрощенной переходной модели третьего порядка и подробной модели Парка асинхронного двигателя и ветрогенератора.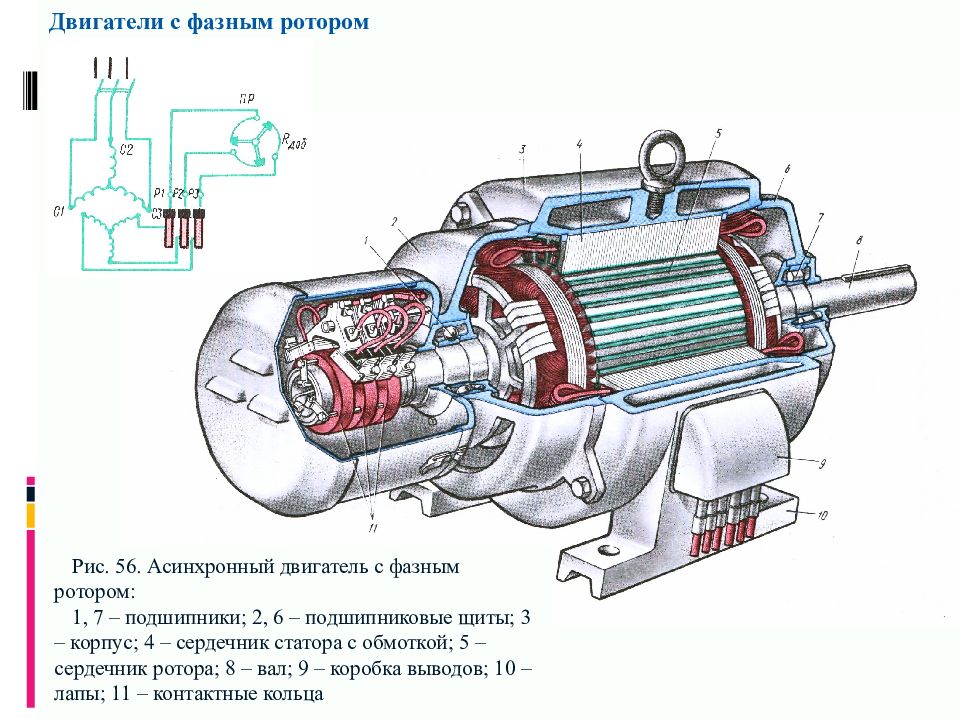 По мере увеличения нагрузки ветрогенератор производит больше активной мощности и поглощает больше реактивной мощности.Показано, что выходная мощность новой упрощенной переходной модели третьего порядка с учетом частоты является более точной, чем у традиционной упрощенной переходной модели третьего порядка, и почти совпадает с выходной мощностью модели Парка.
По мере увеличения нагрузки ветрогенератор производит больше активной мощности и поглощает больше реактивной мощности.Показано, что выходная мощность новой упрощенной переходной модели третьего порядка с учетом частоты является более точной, чем у традиционной упрощенной переходной модели третьего порядка, и почти совпадает с выходной мощностью модели Парка.
В таблице 3 показаны накопленные ошибки между традиционной упрощенной моделью переходных процессов третьего порядка и новой упрощенной моделью переходных процессов третьего порядка по сравнению с подробной моделью (моделью Парка).Показано, что ошибка между новой упрощенной моделью переходного процесса с учетом частоты и детальной моделью меньше, чем между традиционной упрощенной моделью переходного процесса и детальной моделью.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
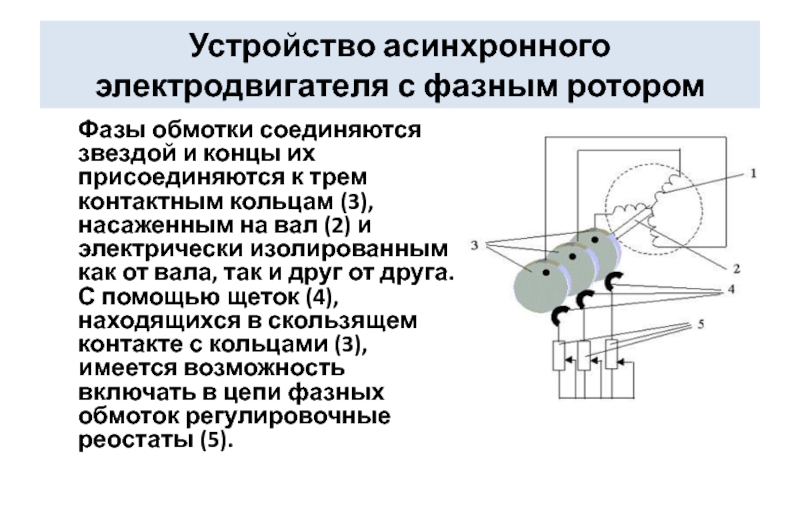 00962
00962 На рисунке 11 показано, что системная частота быстро снижается из-за несбалансированного генерирования активной мощности и нагрузки и медленно восстанавливается, когда скорость ветра возвращается к 10 м/с.
На рисунке 11 показано, что системная частота быстро снижается из-за несбалансированного генерирования активной мощности и нагрузки и медленно восстанавливается, когда скорость ветра возвращается к 10 м/с.
 Выводы
Выводы ), Открытый фонд ключевой лаборатории Чанчжоу по интеграции фотоэлектрических систем и технологии производственного оборудования и Научно-технический фонд Чанчжоу (CE20130043).
), Открытый фонд ключевой лаборатории Чанчжоу по интеграции фотоэлектрических систем и технологии производственного оборудования и Научно-технический фонд Чанчжоу (CE20130043).
 Когда ток переключается, напряжение ротора практически вдвое больше, чем при остановленном роторе, что иногда требует принятия специальных мер по изоляции.
Когда ток переключается, напряжение ротора практически вдвое больше, чем при остановленном роторе, что иногда требует принятия специальных мер по изоляции. При использовании электронных регуляторов скорости и стартеров этот вариант торможения не увеличивает стоимость.
При использовании электронных регуляторов скорости и стартеров этот вариант торможения не увеличивает стоимость.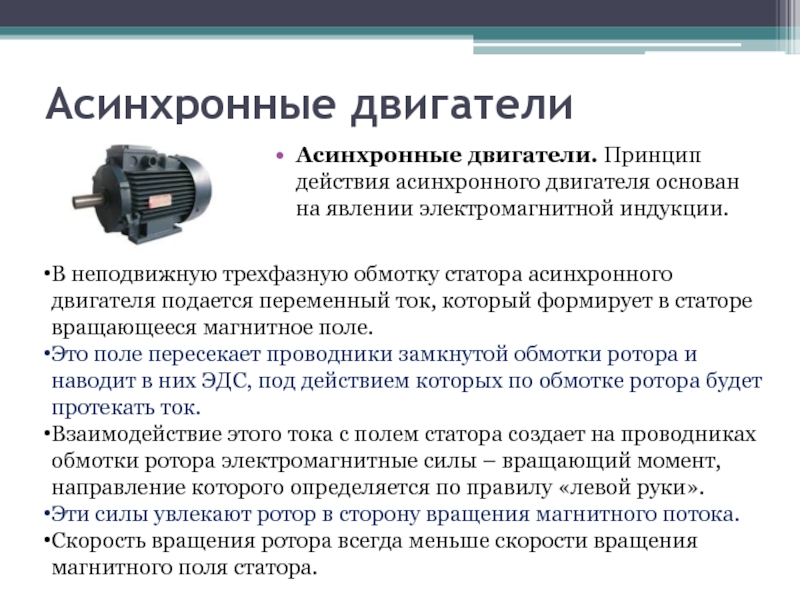
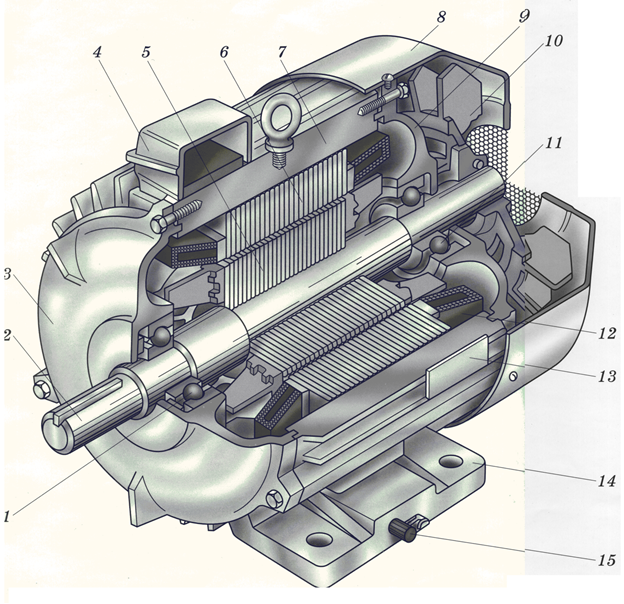
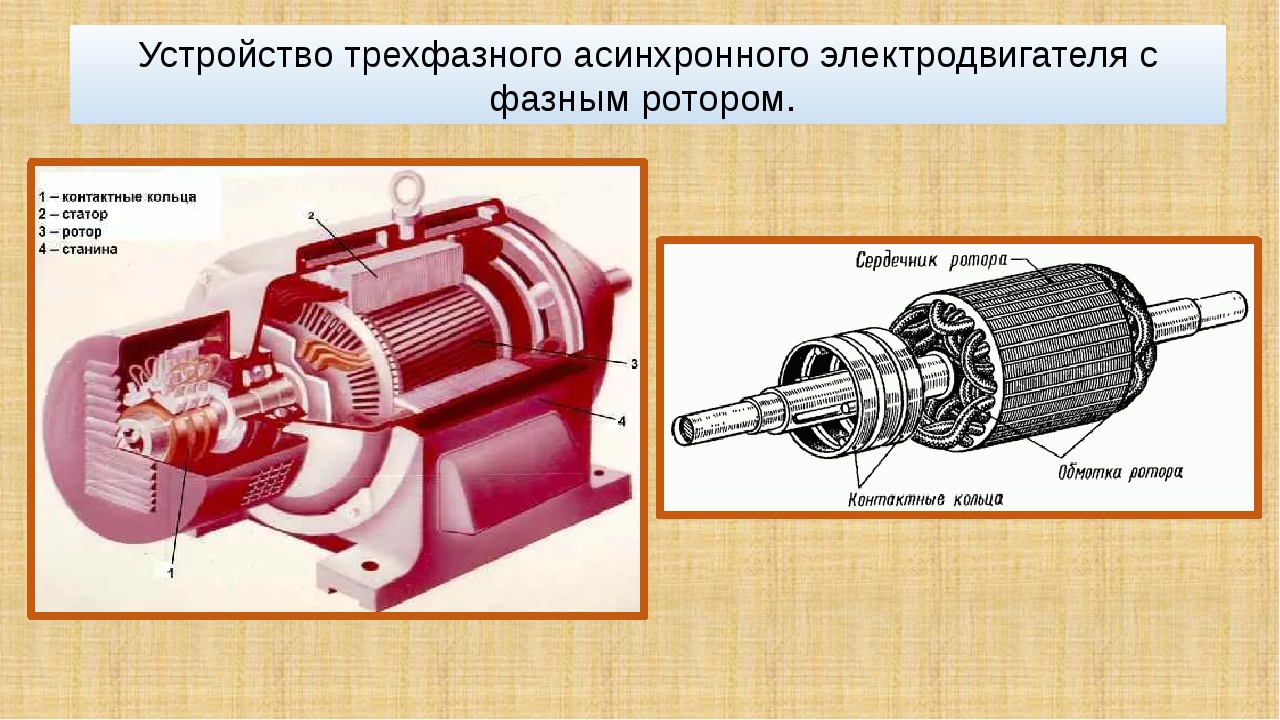
 За исключением нескольких потерь, энергия восстанавливается из сети. Для подъемного двигателя этот тип работы соответствует спуску груза с номинальной скоростью. Тормозной момент точно уравновешивает крутящий момент от нагрузки и вместо снижения скорости запускает двигатель с постоянной скоростью.
За исключением нескольких потерь, энергия восстанавливается из сети. Для подъемного двигателя этот тип работы соответствует спуску груза с номинальной скоростью. Тормозной момент точно уравновешивает крутящий момент от нагрузки и вместо снижения скорости запускает двигатель с постоянной скоростью.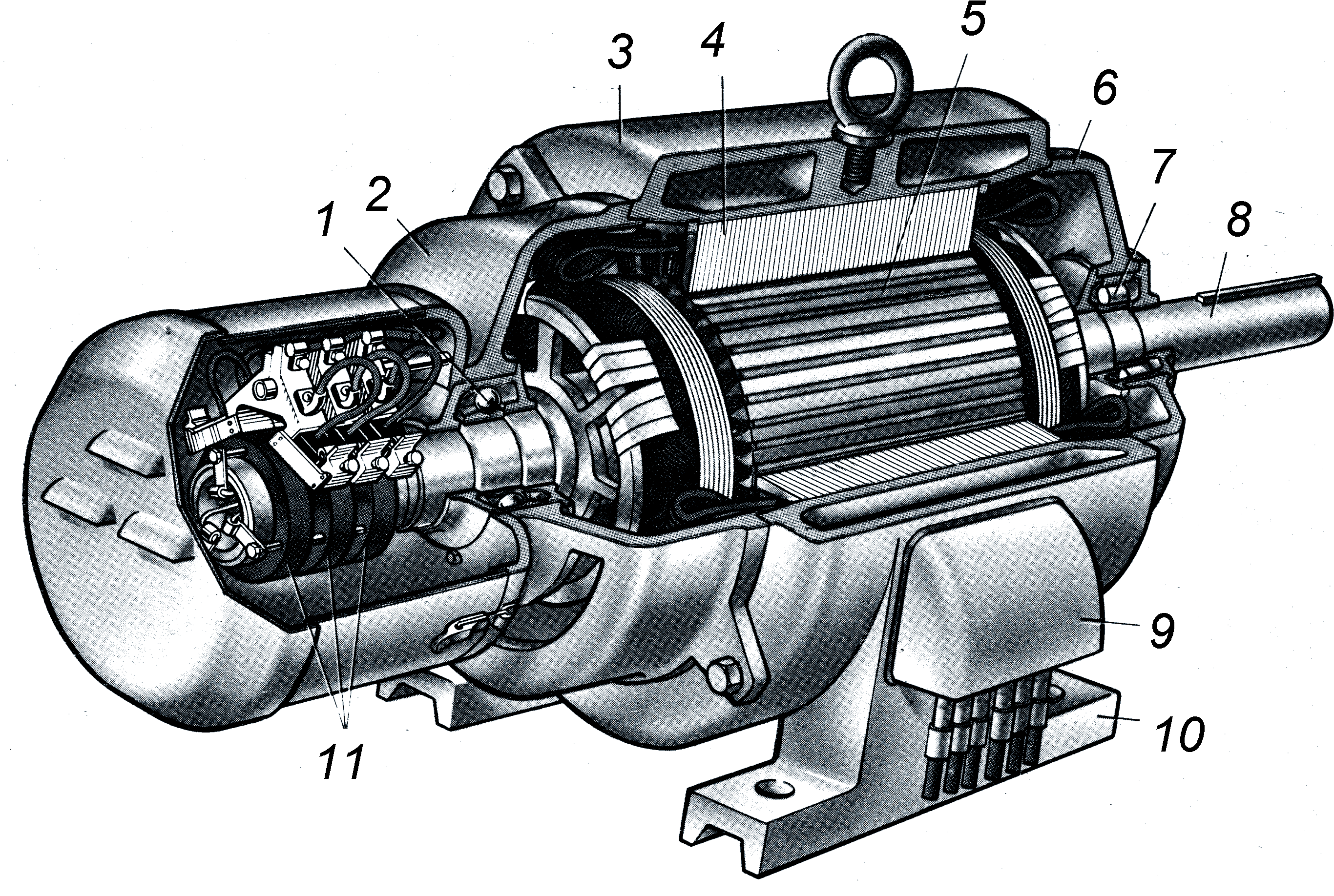 Сверхсинхронное торможение легко достигается с помощью электронного регулятора скорости, который автоматически запускает систему при снижении уставки частоты.
Сверхсинхронное торможение легко достигается с помощью электронного регулятора скорости, который автоматически запускает систему при снижении уставки частоты. Торможение управляется просто обмоткой возбуждения. Однако недостатком является то, что инерция сильно увеличивается .
Торможение управляется просто обмоткой возбуждения. Однако недостатком является то, что инерция сильно увеличивается . 10. Однолинейная схема.
10. Однолинейная схема.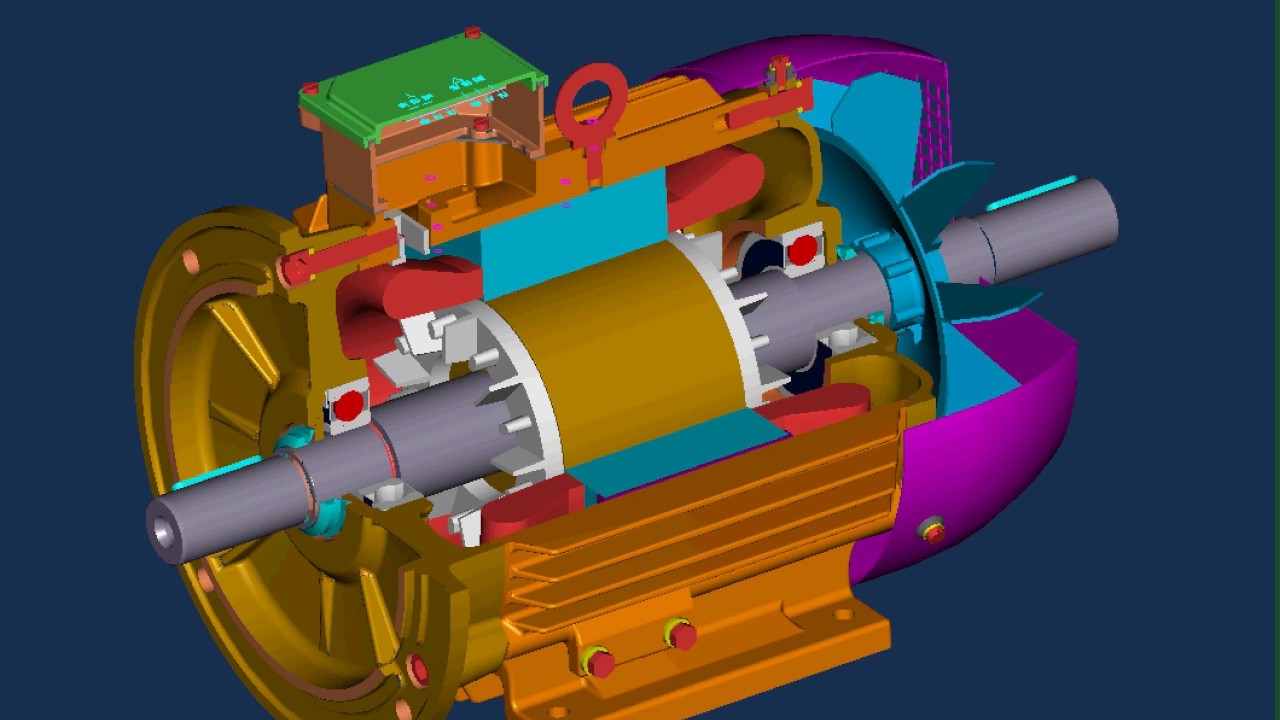
 Ахметшин, П.Ломбарди,
Ахметшин, П.Ломбарди, DOI 10.1109/EPE.2019.8778181
DOI 10.1109/EPE.2019.8778181