Число оборотов электродвигателя: Количество оборотов в минуту у электродвигателей
Количество оборотов в минуту у электродвигателей
Электродвигатель обеспечивает преобразование электрической энергии в механическую. При выборе подходящего электродвигателя требуется учитывать многое: простота конструкции, надежность, стоимость, вес, несложное управление и т.д. В настоящее время электропривод с двигателем постоянного тока стремительно вытесняется асинхронным. Учитывая количество оборотов в минуту, подбирается наиболее подходящий электродвигатель.
Некоторые характеристики электродвигателей
Выбор электродвигателя до 1000 об/мин, как правило, происходит в случае отсутствия необходимости обеспечить вращение вала ротора на высокой скорости. Такой электродвигатель подойдет для установки на лебедку, кран, вибратор, тельфер, на различный подъемный механизм, транспортер и т.д.
Асинхронный электродвигатель до 3000 об/мин следует выбирать для установки на оборудование, на котором вал ротора должен вращаться с достаточно высокой скоростью.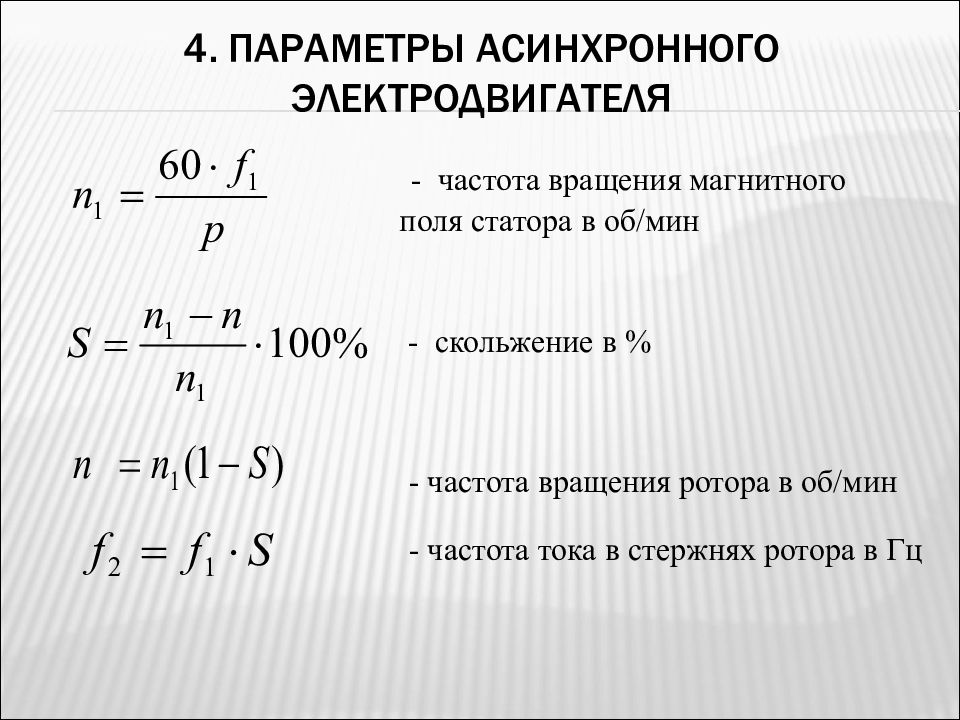
Что касается мощности электродвигателя асинхронного, то она может быть от 0,12 кВт до 200 кВт. Выбор электродвигателя той или иной мощности будет напрямую зависеть от размеров и предназначения оборудования, на которое двигатель будет установлен. Вес электродвигателя будет напрямую зависеть от его мощности.
Необходимо помнить о том, что электродвигатель с меньшим количеством оборотов будет отличаться большим весом, в сравнении с электродвигателем с большим количеством оборотов. При этом мощность такого оборудования будет одинаковой. Конструкция электродвигателя подбирается, исходя из климатических условий.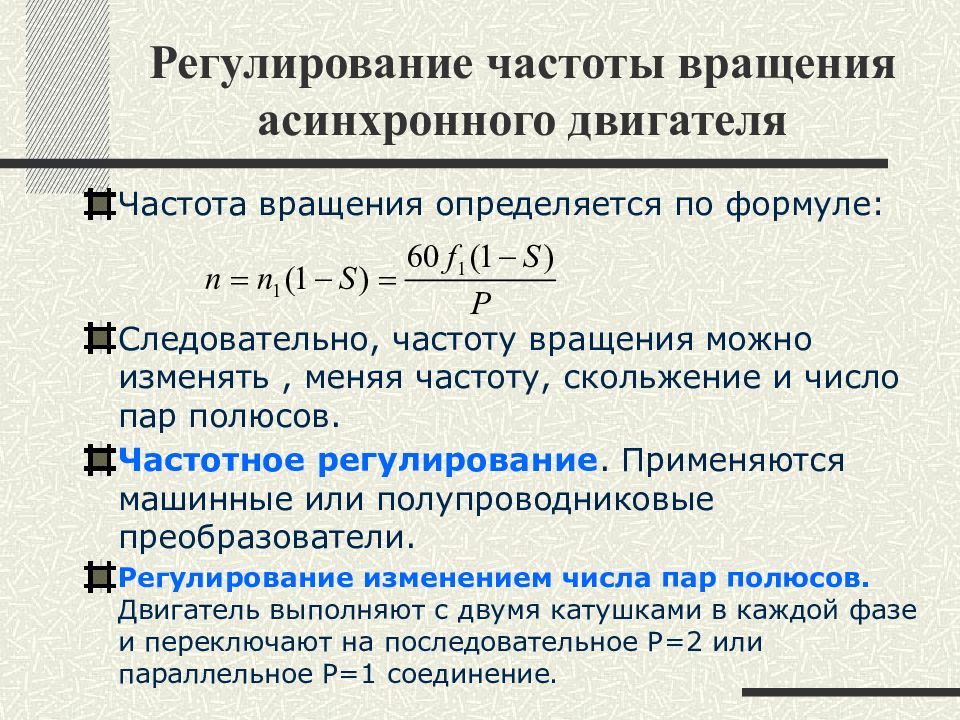
Просмотров: 4154
Дата: Воскресенье, 15 Декабрь 2013
Узнать мощность электродвигателя по диаметру вала без бирки
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Заказать новый электродвигатель по телефону
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | ||
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 | |||
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об.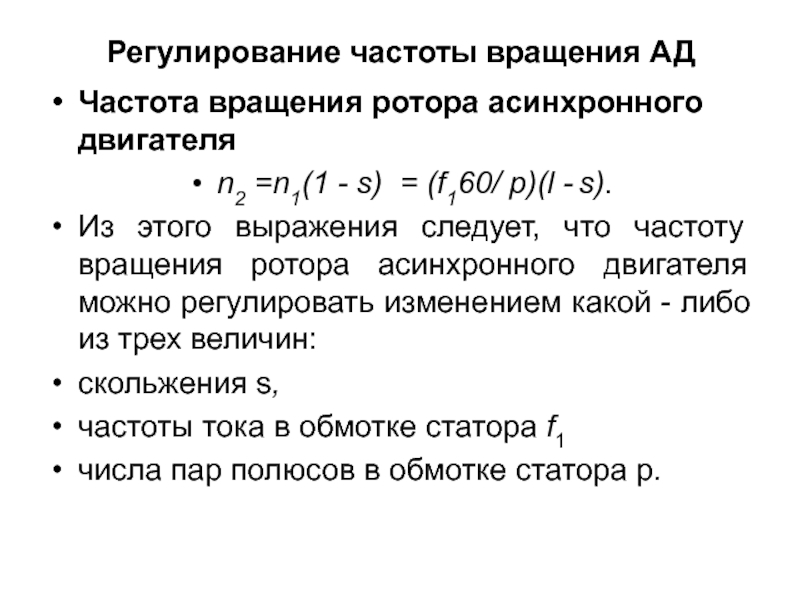 мин. Приводим пример маркировки на основании АИР 180:
мин. Приводим пример маркировки на основании АИР 180:
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.Как определить скорость вращения электродвигателя
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года.
 Шлейфы проводов используются шесть лет.
Шлейфы проводов используются шесть лет. - Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
 Шлейфы проводов используются шесть лет.
Шлейфы проводов используются шесть лет.Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.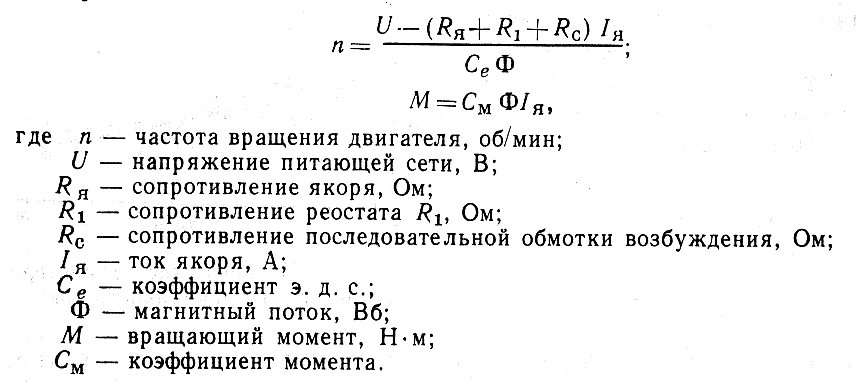
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой.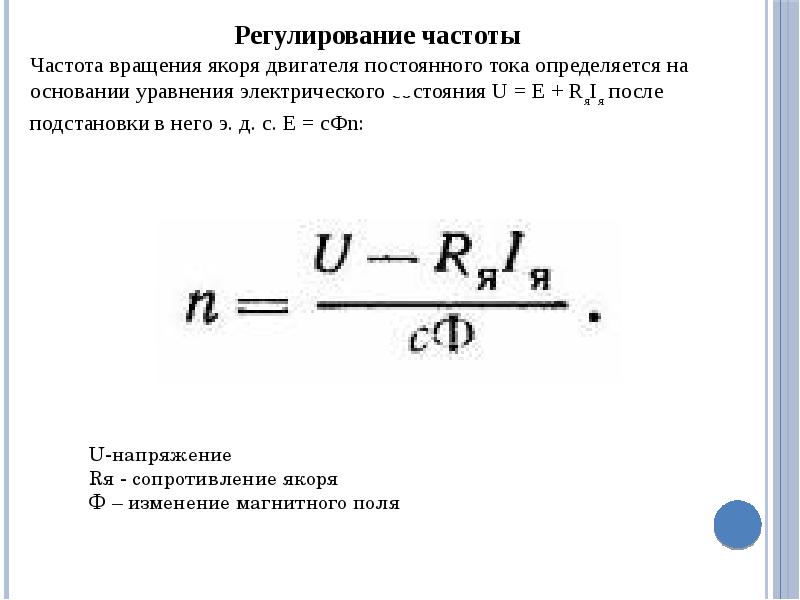 И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л.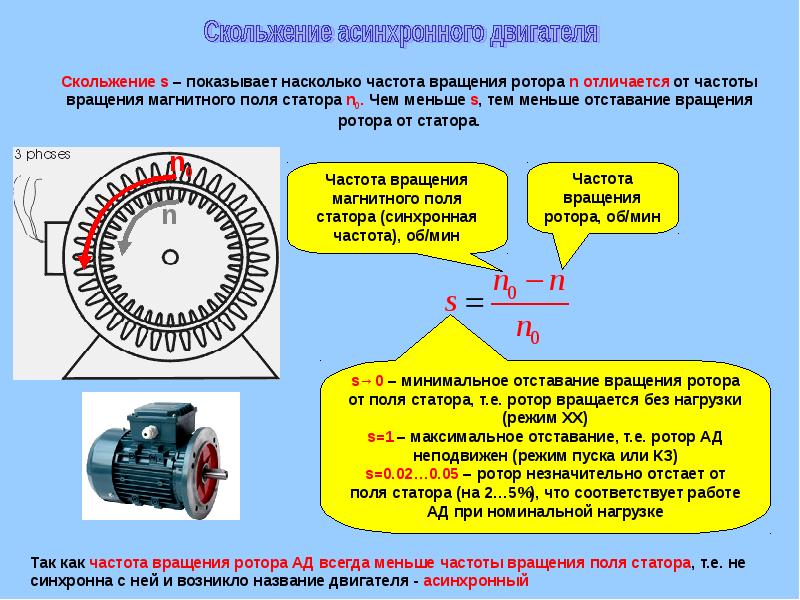 Рыженков
Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
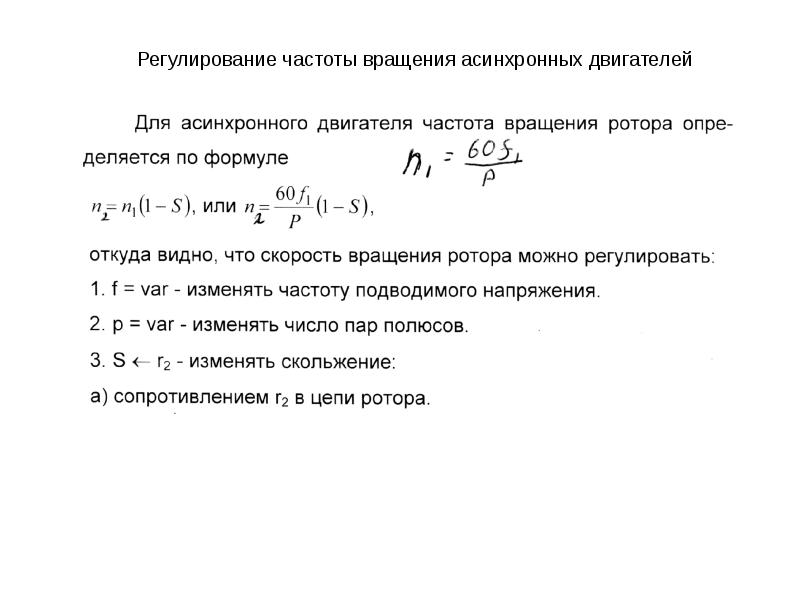
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
 При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений; Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип.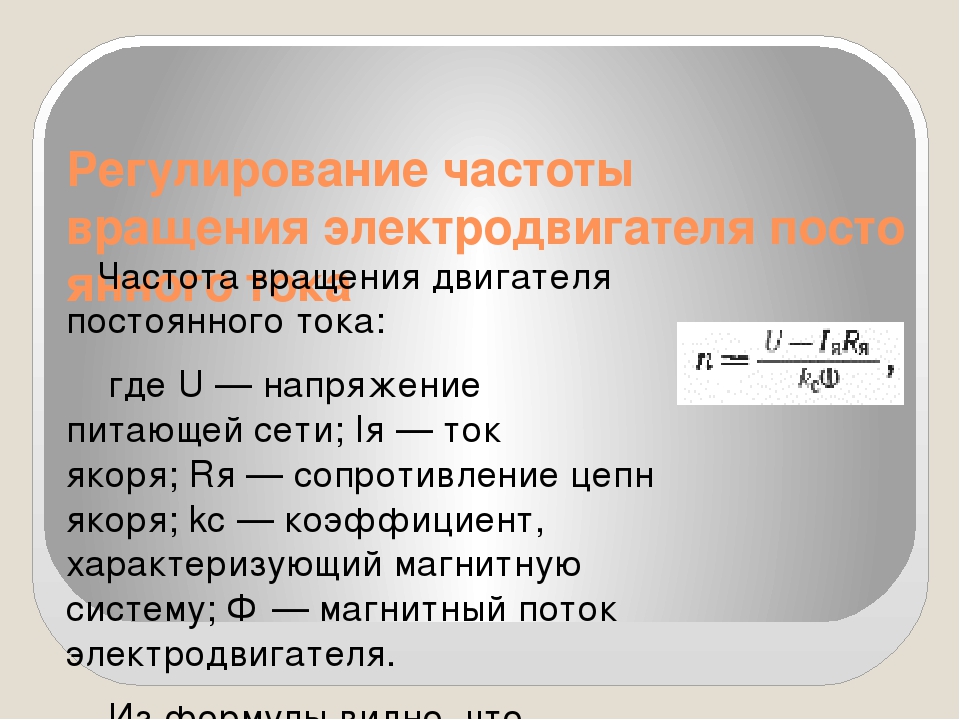 Электромотор развивает мощность в 1000 оборотов.
Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный.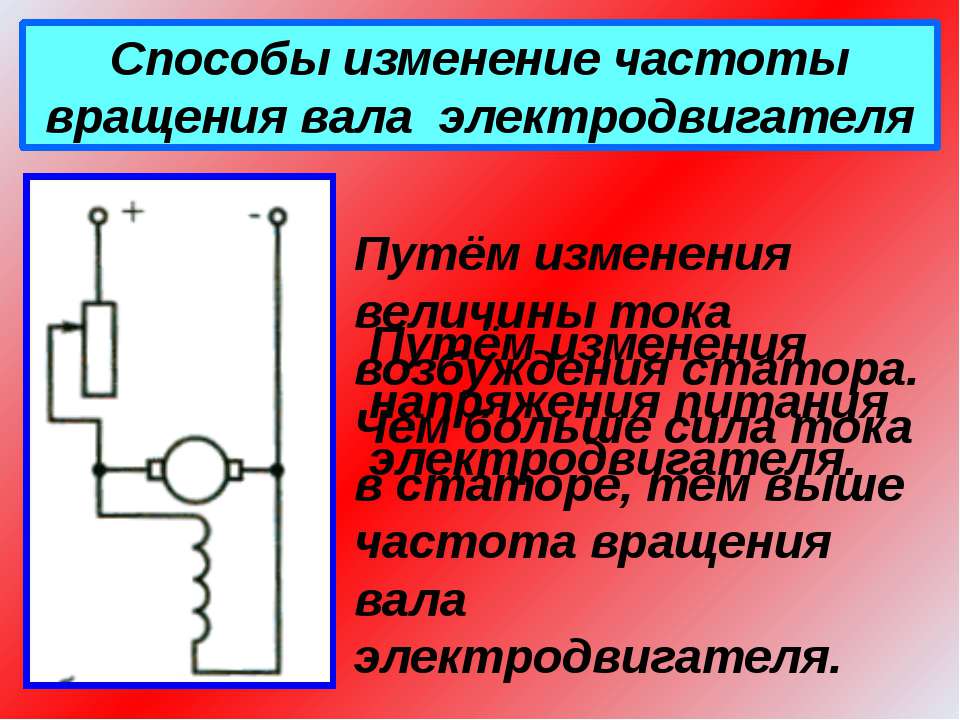 Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами.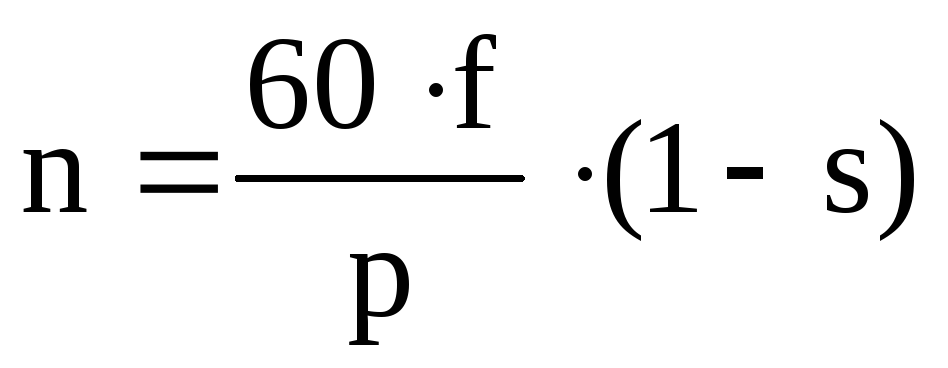 Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.

 Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.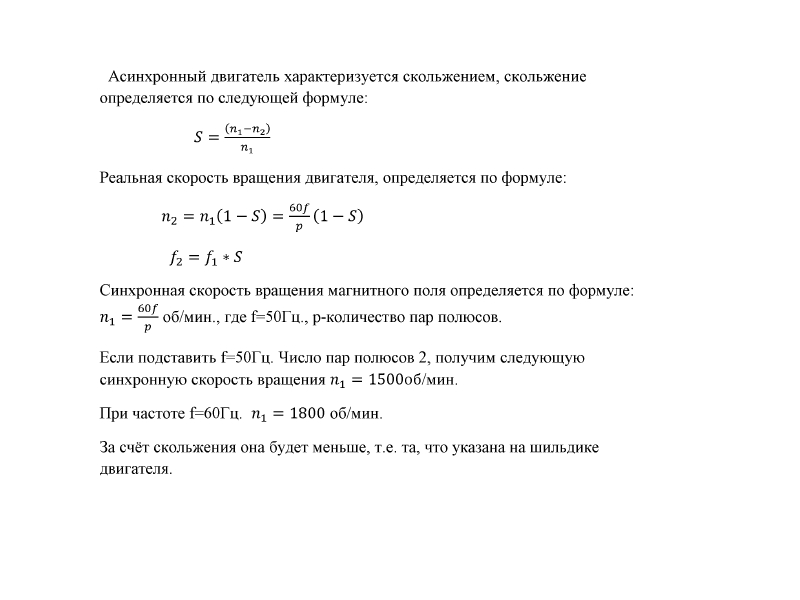
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе. Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
Формула расчета частоты вращений
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
 Такой же результат даёт уменьшение питающего напряжения;
Такой же результат даёт уменьшение питающего напряжения;Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:обзор эффективных методов определения скорости шпинделя
При покупке электродвигателя с рук рассчитывать на наличие технической документации к нему не приходится. Тогда встает вопрос о том, как узнать количество оборотов приобретаемого устройства. Можно довериться словам продавца, однако добросовестность не всегда является их отличительной чертой.
Тогда возникает проблема с определением числа оборотов. Решить ее можно, зная некоторые тонкости устройства мотора. Об этом и пойдет речь дальше.
Краткое содержимое статьи:
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Когда кольцо наполовину закрыто катушкой, число оборотов за минуту достигает 3000. Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Частотные преобразователи выступают в качестве надежных устройств, способных кардинальным образом менять частоту тока и форму сигнала. Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.
Микроконтроллер управляет всем процессом работы преобразователя. Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.
Все преобразователи оснащаются защитой, имеющей несколько степеней.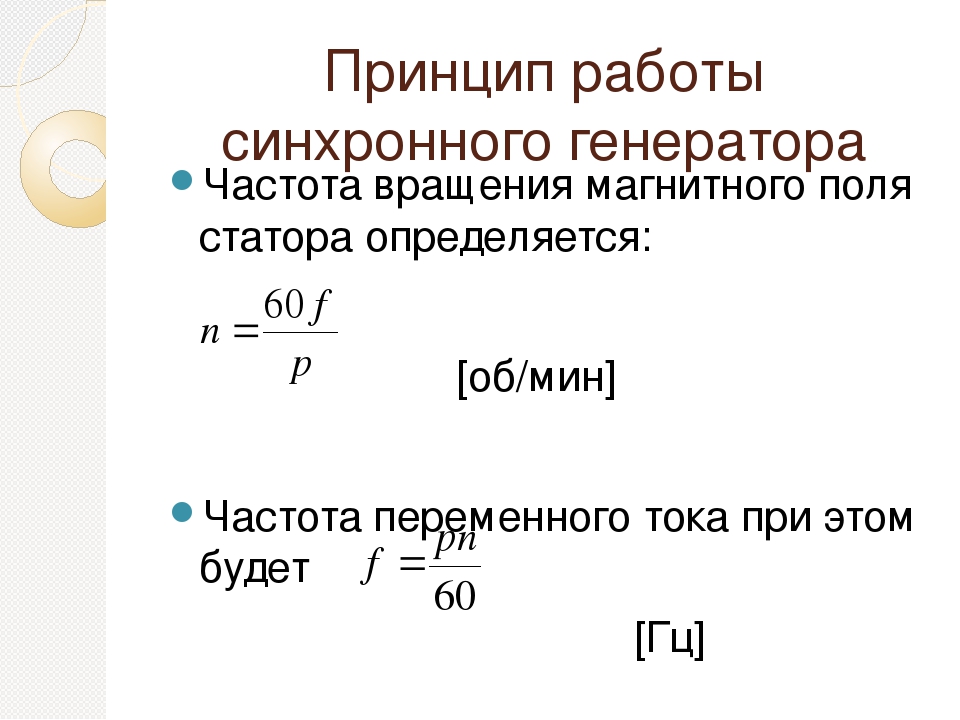 Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:
Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.
Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.
Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.
Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.
Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.
Фото оборотов электродвигателя
Определение оборотов электродвигателя по катушкам обмотки
Просмотров 944 Опубликовано Обновлено
Иногда, в моей практике приходилось сталкиваться с одной проблемой, связанной с асинхронными электродвигателями — как определить количество оборотов ротора электродвигателя, если нет бирки и технической документации на электромотор?
Вопрос, на самом деле, решается просто — обороты можно определить по катушкам обмотки статора асинхронного электродвигателя.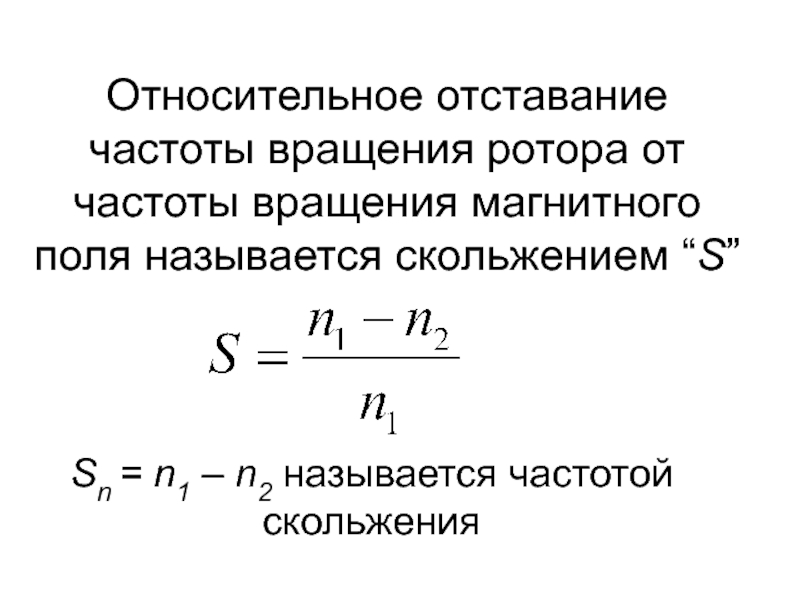
Асинхронные электродвигатели делятся по количеству оборотов ротора на: 1000 об/мин, 1500 об/мин и 3000 об/мин. При этом следует помнить, что если мы называем асинхронный электродвигатель «тысячником», то у него нет 1000 об/мин, т.к. он асинхронный (ротор отстаёт от магнитного поля). У него может быть 940 об/мин , 980 об/мин или около этого , но не 1000 об/мин. Тоже самое касается и «полуторатысячников» (1440 — 1480 об/мин), и «трёхтысячников» (2940 — 2980 об/мин).
Как определить обороты ротора по обмотке статора
Открываем одну из двух крышек электродвигателя и смотрим на катушки обмотки, вернее, на одну катушку. Она может состоять из нескольких секций (2-х , 3-х , 4-х ).
В статоре находим катушку, которая нам лучше всего видна. Теперь смотрим на её размер, относительно железа статора. Я не буду рассказывать, как катушки соединены между собой, как соединены секции в катушке, через сколько пазов в статоре они закладываются и т.д. Это нам сейчас не нужно.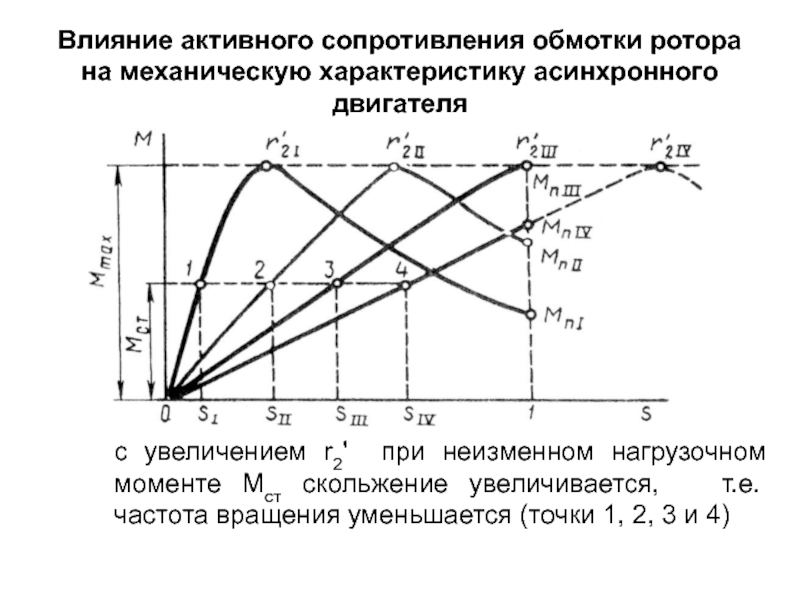 Нам сейчас нужно определить расстояние, которое занимает одна катушка по кольцу железа статора.
Нам сейчас нужно определить расстояние, которое занимает одна катушка по кольцу железа статора.
Определив это расстояние (даже на глаз), мы может с уверенностью сказать сколько оборотов имеет данный асинхронный электродвигатель.
1. Если катушка занимает половину кольца железа статора, то электродвигатель на 3000 об/мин.
2. Если катушка занимает 1/3 кольца железа, то электродвигатель на 1500 об/мин.
3. Если катушка занимает 1/4 кольца железа, то электродвигатель на 1000 об/мин.
Вот так всё легко и просто.
Измерение числа оборотов двигателя. Как определить обороты электродвигателя. Типовые характеристики по монтажным размерам
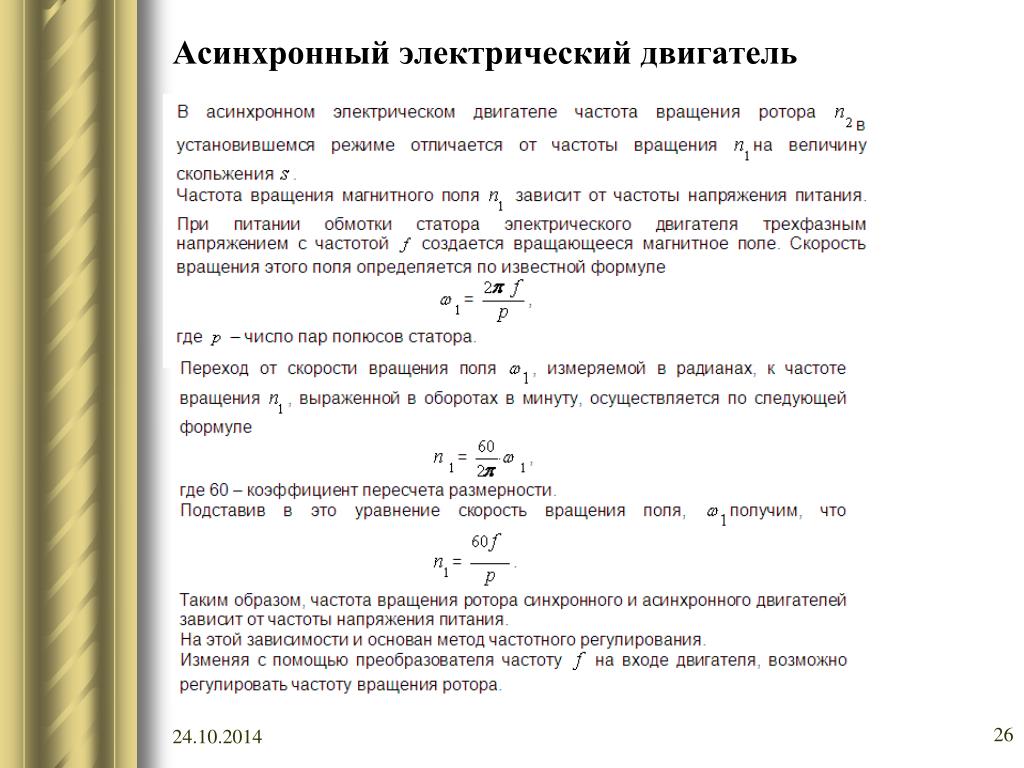
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — ) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.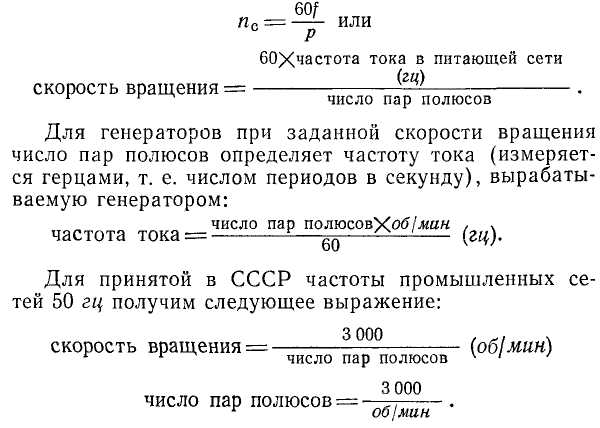
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
При покупке электродвигателя с рук рассчитывать на наличие технической документации к нему не приходится. Тогда встает вопрос о том, как узнать количество оборотов приобретаемого устройства. Можно довериться словам продавца, однако добросовестность не всегда является их отличительной чертой.
Тогда возникает проблема с определением числа оборотов. Решить ее можно, зная некоторые тонкости устройства мотора.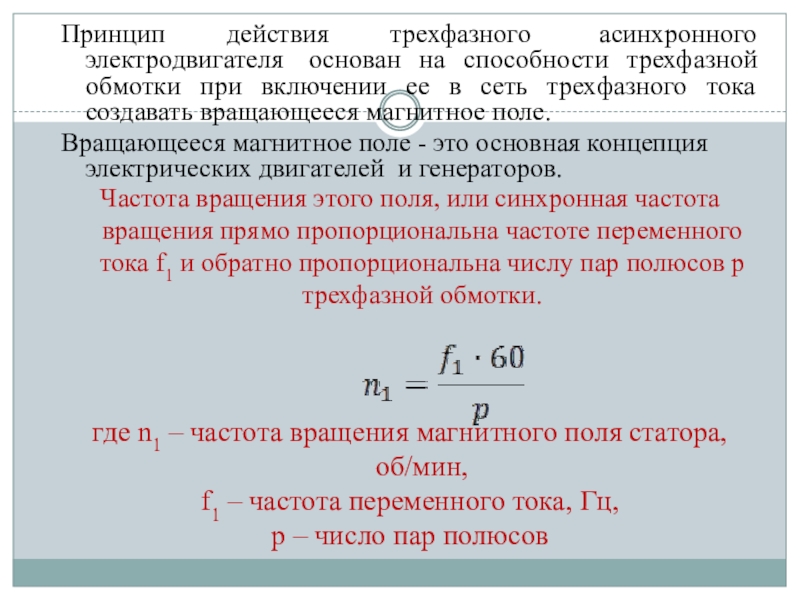 Об этом и пойдет речь дальше.
Об этом и пойдет речь дальше.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Когда кольцо наполовину закрыто катушкой, число оборотов за минуту достигает 3000.
 Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.
Если закрывается третья часть кольца – число оборотов составляет примерно 1500. При четверти – число оборотов равно 1000.Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Частотные преобразователи выступают в качестве надежных устройств, способных кардинальным образом менять частоту тока и форму сигнала. Их основу составляют полупроводниковые триоды (транзисторы) высокой мощности и модулятор импульсов.
Микроконтроллер управляет всем процессом работы преобразователя. Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.
Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования.
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Что дает преобразователь?
Необходимость использования регулятора оборотов электродвигателя в случае асинхронных моделей состоит в следующем:
Достигается значительная экономия электрической энергии. Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Поскольку не всякое оборудование требует высоких скоростей вращения моторного вала, ее имеет смысл снизить на четверть.
Обеспечивается надежная защита всех механизмов. Преобразователь частоты позволяет контролировать не только температуру, но и давление и прочие параметры системы. Этот факт особенно важен, если при помощи двигателя приводится в действие насос.
Датчик давления устанавливается в емкости, посылает сигнал при достижении должного уровня, благодаря чему мотор останавливается.
Совершается плавный пуск. Благодаря регулятору снимается необходимость использования дополнительных электронных устройств. Частотный преобразователь легко настроить и получить желаемый эффект.
Снижаются расходы на техническое обслуживание, поскольку регулятор сводит к минимуму риски поломки привода и других механизмов.
Таким образом электродвигатели с регулятором оборотов оказываются надежными устройствами с широкой сферой применения.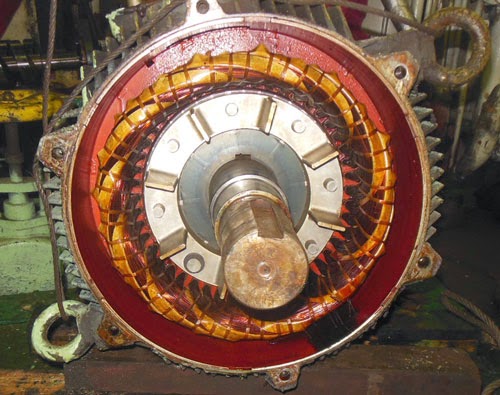
Важно помнить, что эксплуатация любого оборудования на основе электрического мотора только тогда окажется правильной и безопасной, когда параметр частоты вращения будет адекватен условиям использования.
Фото оборотов электродвигателя
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор.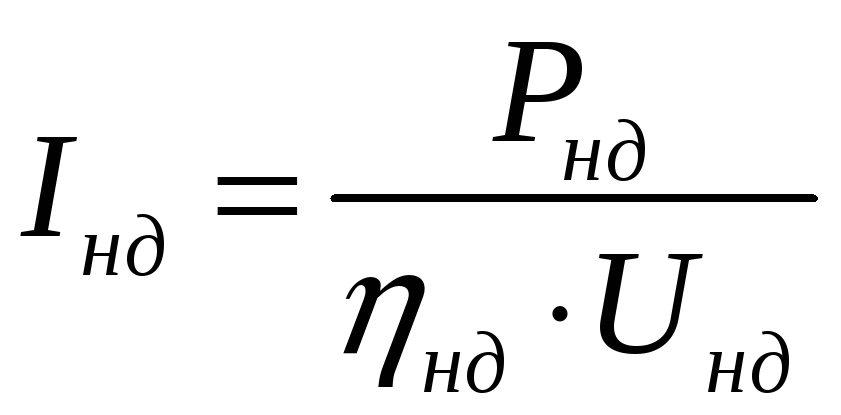 Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Рыженков
При эксплуатации любой машины не обойтись без электродвигателя. Многие покупают электродвигатель с рук без какой-либо документации. В такой ситуации возникает проблема с определением оборотов электродвигателя. Чтобы решить данную проблему, можно использовать несколько способов.
Самый простой способ определения оборотов электродвигателя – использование тахометра. Но наличие данного прибора у человека, не специализирующегося на электродвигателях, большая редкость. Поэтому существуют способы определения оборотов на глаз. Для определения оборотов электродвигателя откройте одну из крышек электродвигателя и найдите катушку обмотки. Катушек в электродвигателе может быть несколько. Выберете ту катушку, которая находится в зоне видимости и к которой проще доступ. Старайтесь не нарушить целостность электродвигателя, не доставайте детали. Не пробуйте отсоединить детали между собой. Статор – стационарная часть электродвигателя, ротор – подвижная и вращается внутри статора. Вам не потребуется ни линейка, ни точные подсчеты. Вся процедура определяется на глаз.
Статор – стационарная часть электродвигателя, ротор – подвижная и вращается внутри статора. Вам не потребуется ни линейка, ни точные подсчеты. Вся процедура определяется на глаз.Все основные характеристики электродвигателя должны быть указаны на металлической бирке, располагающейся на его корпусе. Но на практике бирка или отсутствует, или информация стерлась в течение эксплуатации./F036M_(6-90V-15A)-03.JPG)
Несколько лет назад мне срочно понадобилось замерить обороты двигателя, а тахометра нет! Как тут быть? Поскольку замерить обороты мне нужно было позарез, вариант заказывать тахометр и ждать его месяц, меня не устраивал. Пришлось думать! И мне пришла в голову идея использовать для этой цели компьютер, а точнее — звуковой редактор установленый на компе.
Звуковой редактор «Adobe Audition» у меня установлен давно для работы со звуком. Поэтому осталось придумать способ соединения двигателя с компом. Это вопрос был решён буквально в течение 1 минуты — ИК светодиодный приёмник! Полез в коробочку и достал светодиод, а также штеккер «мини джек». Нашёл кусок микрофонного кабеля и через 10 минут светодиодный датчик был готов! Сам диод я вклеил в клопачек от авторучки.
Кабель в сборе.
Для освещения ИК светодиодного датчика использовал фонарик. Тоже светодиодный.
Датчик приклеил кусочком скотча на носу модели, а фонарик просто держал рукой. Расстояние между датчиком и фонариком 5. ….7 см. Световой поток от фонарика освещает приёмный светодиод, а воздушный винт прерывает (модулирует) световой поток. В результате светодиод генерирует импульсы. Датчик подключается к микрофонному входу звуковой карты. Необходимое для работы светодиода напряжение обеспечивается конструкцией микрофонного гнезда звуковой карты. Любая звуковая карта рассчитана на работу в том числе и с электретным микрофоном, поскольку ему нужно напряжение питания + 5 Вольт. Поэтому это напряжение присутствует на центральном контакте
….7 см. Световой поток от фонарика освещает приёмный светодиод, а воздушный винт прерывает (модулирует) световой поток. В результате светодиод генерирует импульсы. Датчик подключается к микрофонному входу звуковой карты. Необходимое для работы светодиода напряжение обеспечивается конструкцией микрофонного гнезда звуковой карты. Любая звуковая карта рассчитана на работу в том числе и с электретным микрофоном, поскольку ему нужно напряжение питания + 5 Вольт. Поэтому это напряжение присутствует на центральном контакте
микрофонно гнезда и поступает на светодиод, что и обеспечивает его работу. В результате импульсы, возникающие при вращении воздушного винта, через микрофонный вход поступают на звуковую карту, а редактор «Adobe Audition» записывает всё это, как обычный звуковой файл.
Для измерения частоты вращения двигателя запись достаточно осуществить в течение нескольких секунд. Этого достаточно. Вот что мы увидим на экране в окне звукового редактора.
Прежде всего хочу отметить, что в самом низу Редактора имеется временная шкала, именно по ней и определяются обороты двигателя.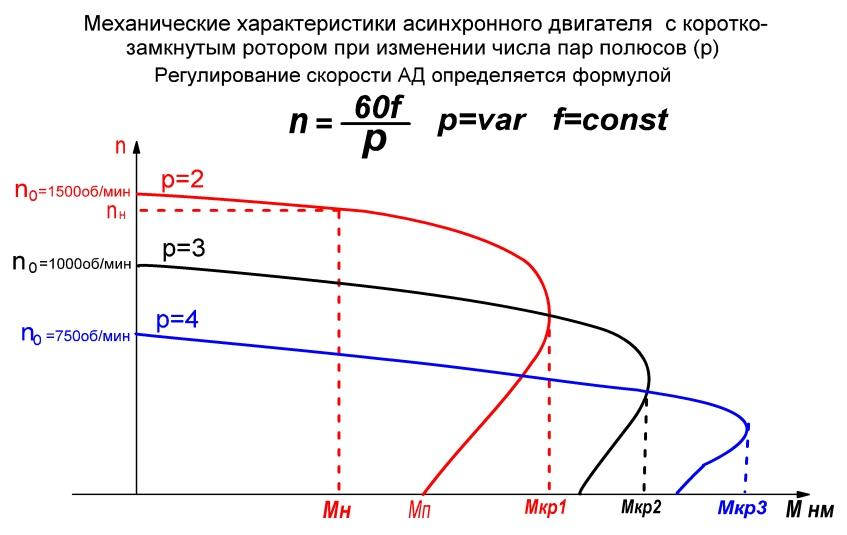 В данном случае время записи составило 9 секунд. Стрелка показывает внизу окна Редактора временную шкалу. Теперь нужно укрупнить масштаб звукового файла. Чтобы не считаль имулься за одну секунду, (их долго считать), посчитаем их за отрезок времени 0,1 секунды, а потом умножим на 10. Вначале по временной шкале выбираем участок записи чуть более 0,5 секунды и растягиваем его на весь экран.
В данном случае время записи составило 9 секунд. Стрелка показывает внизу окна Редактора временную шкалу. Теперь нужно укрупнить масштаб звукового файла. Чтобы не считаль имулься за одну секунду, (их долго считать), посчитаем их за отрезок времени 0,1 секунды, а потом умножим на 10. Вначале по временной шкале выбираем участок записи чуть более 0,5 секунды и растягиваем его на весь экран.
Выделеный участок ~ 0,5 сек растянут на весь экран. Временная шкала тоже растянулась.
Теперь на временной шкале выделяем отрезок времени ровно 0,1 сек — от 3,1 до 3,2 сек.
и тоже растягиваем его на весь экран. Теперь видно четкие импульсы, подсчитать которые не сложно.
Считаем импульсы в интервале времени 0,1 сек. — их 42 .
А теперь простая арифметика. Раз за 0,1 сек. имеем 42 импульса, значит за 1 сек. их от датчика поступило 420. А за 1 минуту 420 х 60 сек. = 25200 импульсов. Но так ка винт имеет 2 лопасти и дважды прерывает световой поток, результат нужно поделить на 2 и получим 12600 оборотов в минуту.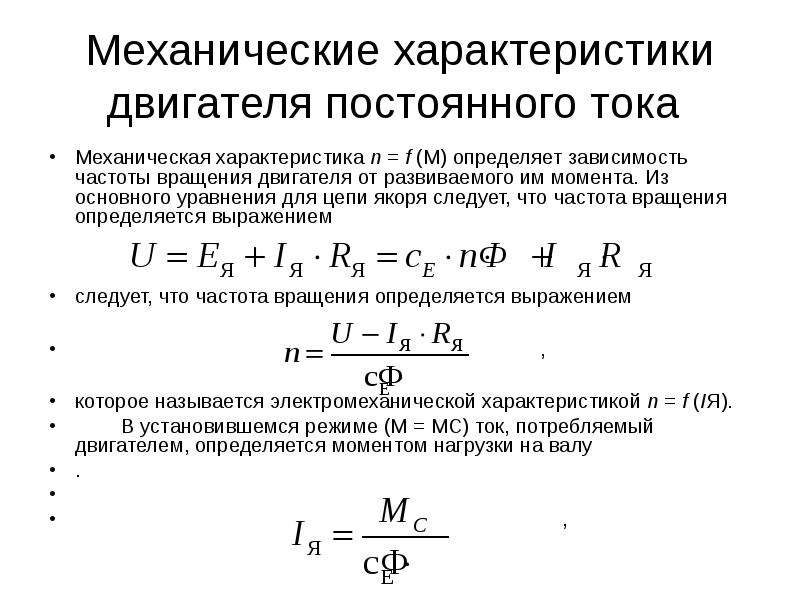 Что и требовалось определить. В случае 3х лопастного винта результат делим на 3. В случае 4х лопастного винта делим на 4. Такой необычный тахометр — синтез ИК диода, компа и звукового редактора меня вполне удовлетворил! А вопрос приобретения «железного» тахометра в магазине,
Что и требовалось определить. В случае 3х лопастного винта результат делим на 3. В случае 4х лопастного винта делим на 4. Такой необычный тахометр — синтез ИК диода, компа и звукового редактора меня вполне удовлетворил! А вопрос приобретения «железного» тахометра в магазине,
у меня отпал сам собой. И от приобретения отказался.
На полетах в поле тахометр мне не нужен, а дома комп и кабель со светодиодом всегда под рукой.
Думаю, что не у всех коллег дома уже имеется тахометр, а вот замерить обороты двигателя хочется! В таком случае мой опыт, надеюсь, товарищам пригодится. «Adobe Audition» можно бесплатно скачать отсюда http://www.fayloobmennik.net/2293677 . Можно использовать и другой звуковой редактор, кому что нравится. Мой звуковой файл этого теста двигателя, записаный Редактором лежит тут . В данной статье я хотел показать, что при необходимости, если сильно захотеть, в большинстве случаев, которые возникают у нас, моделистов, можно придумать достойную замену необходимому, но отсутствующему, прибору. Надеюсь, китайские товарищи на меня не в обиде.
Надеюсь, китайские товарищи на меня не в обиде.
Что определяет скорость вращения двигателя?
Электродвигатели отличаются разнообразием и широким диапазоном типоразмеров. Существуют двигатели с дробной мощностью (л.с.) для небольших бытовых приборов и двигатели с тысячами л.с. для тяжелого промышленного использования. Другие характеристики, указанные на паспортных табличках двигателей, включают их входное напряжение, номинальный ток, энергоэффективность и скорость в об / мин.
Скорость вращения электродвигателя зависит от двух факторов: его физической конструкции и частоты (Гц) источника питания.Инженеры-электрики выбирают скорость двигателя в зависимости от потребностей каждого приложения, подобно тому, как механическая нагрузка определяет требуемую мощность.
Убедитесь, что в вашем здании есть подходящий электродвигатель для каждого применения.
Как частота напряжения соотносится со скоростью двигателя
В зависимости от страны источник питания будет иметь частоту 60 Гц или 50 Гц. Хотя трехфазный двигатель будет вращаться с обоими входами мощности, возникнут проблемы с производительностью, если двигатель указан для одной частоты и будет использоваться с другой.
Хотя трехфазный двигатель будет вращаться с обоими входами мощности, возникнут проблемы с производительностью, если двигатель указан для одной частоты и будет использоваться с другой.
Поскольку источник напряжения 60 Гц переключает полярность на 20% быстрее, чем источник питания 50 Гц, двигатель, рассчитанный на 50 Гц, будет вращаться на 20% выше оборотов в минуту. Крутящий момент двигателя остается относительно постоянным, а более высокая скорость приводит к более высокой мощности на валу. Двигатель также выделяет больше тепла, но охлаждающий вентилятор также ускоряется вместе с валом, помогая отводить лишнее тепло. Двигатель также имеет тенденцию потреблять больше реактивного тока, что снижает его коэффициент мощности.
Подключение двигателя 60 Гц к источнику питания 50 Гц — более тонкий вопрос.Снижение скорости при том же напряжении может привести к насыщению магнитопровода двигателя, увеличению тока и перегреву агрегата. Самый простой способ предотвратить насыщение — снизить входное напряжение, и в идеале соотношение В / Гц должно оставаться постоянным:
- Двигатель 60 Гц, работающий при 50 Гц, составляет 83,3% от номинальной частоты.
- Чтобы поддерживать постоянное соотношение В / Гц, входное напряжение также следует снизить до 83,3%.
- Если электродвигатель обычно работает при 240 В и 60 Гц, входное напряжение при 50 Гц должно быть 200 В, чтобы соотношение составляло 4 В / Гц.
Электропроводка двигателя и количество полюсов
Постоянный магнит имеет два полюса, но двигатели могут быть подключены так, чтобы их магнитное поле имело большее количество полюсов. Двухполюсный двигатель совершает полный оборот с одним изменением полярности, в то время как четырехполюсный двигатель вращается только на 180 ° с одним переключателем полярности. Чем больше полюсов, тем ниже скорость двигателя: если все остальные факторы равны, 4-полюсный электродвигатель будет вращаться со скоростью, вдвое меньшей, чем 2-полюсный электродвигатель.
- Источник питания 60 Гц меняет полярность 60 раз в секунду, а двухполюсный двигатель будет вращаться со скоростью 3600 об / мин при подключении к этому источнику. Четырехполюсный двигатель будет вращаться только со скоростью 1800 об / мин.
- Для двигателей с частотой 50 Гц скорость составляет 3000 об / мин при 2 полюсах и 1500 об / мин при 4 полюсах.
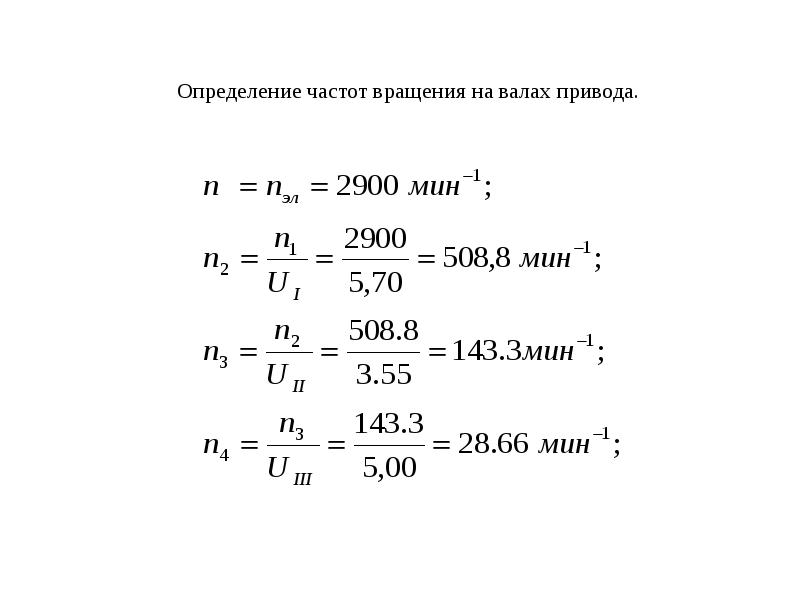 Четырехполюсный двигатель будет вращаться только со скоростью 1800 об / мин.
Четырехполюсный двигатель будет вращаться только со скоростью 1800 об / мин.Эту концепцию можно резюмировать следующим уравнением:
Используя это уравнение, 4-полюсный двигатель с частотой 60 Гц имеет скорость 1800 об / мин, а 6-полюсный двигатель с частотой 50 Гц имеет скорость 1000 об / мин. Однако на самом деле это скорость магнитного поля, называемая синхронной скоростью, которая не всегда равна скорости вала.
- В синхронном двигателе , ротор использует постоянный магнит или электромагнит для вращения с расчетной скоростью.
- С другой стороны, асинхронный двигатель будет работать немного ниже расчетной скорости вращения. Так работает электромагнитная индукция, и ее не следует рассматривать как неисправность.
Если электродвигатель имеет паспортную скорость 1800 об / мин, можно сделать вывод, что это 4-полюсный синхронный двигатель, рассчитанный на 60 Гц. С другой стороны, если скорость на паспортной табличке имеет меньшее значение, например 1760 об / мин, это асинхронный двигатель.
С другой стороны, если скорость на паспортной табличке имеет меньшее значение, например 1760 об / мин, это асинхронный двигатель.
Преобразователь частоты может управлять скоростью двигателя, регулируя входную частоту, как следует из его названия. ЧРП также может модулировать напряжение, чтобы поддерживать соотношение В / Гц ниже точки, в которой магнитный сердечник насыщается. Благодаря этой функции частотно-регулируемый привод не повреждает двигатель, даже если скорость снижается ниже значения, указанного на паспортной табличке. Основным недостатком частотно-регулируемых приводов являются гармонические искажения, поскольку они являются нелинейными нагрузками, но это можно компенсировать с помощью фильтров гармоник.
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ — прикладное промышленное электричество
После внедрения Эдисоном в США системы распределения электроэнергии постоянного тока начался постепенный переход к более экономичной системе переменного тока. Освещение работало как на переменном, так и на постоянном токе. Передача электрической энергии на более длинные расстояния с меньшими потерями на переменном токе. Однако у двигателей была проблема с переменным током. Первоначально двигатели переменного тока были сконструированы как двигатели постоянного тока, но возникли многочисленные проблемы из-за изменения магнитных полей.
Передача электрической энергии на более длинные расстояния с меньшими потерями на переменном токе. Однако у двигателей была проблема с переменным током. Первоначально двигатели переменного тока были сконструированы как двигатели постоянного тока, но возникли многочисленные проблемы из-за изменения магнитных полей.
Чарльз П. Стейнмец внес свой вклад в решение этих проблем, рассмотрев гистерезисные потери в железной арматуре. Никола Тесла представил совершенно новый тип двигателя, когда он представил вращающуюся турбину, вращающуюся не водой или паром, а вращающимся магнитным полем. Его новый тип двигателя, асинхронный двигатель переменного тока, по сей день является рабочей лошадкой в отрасли. Его прочность и простота обеспечивают долгий срок службы, высокую надежность и низкие эксплуатационные расходы.Тем не менее, небольшие щеточные электродвигатели переменного тока, аналогичные разнообразным электродвигателям постоянного тока, сохраняются в небольших приборах вместе с небольшими асинхронными электродвигателями Tesla. Выше одной лошадиной силы (750 Вт) царит мотор Tesla.
Выше одной лошадиной силы (750 Вт) царит мотор Tesla.
Современные твердотельные электронные схемы приводят в действие бесщеточные двигатели постоянного тока с помощью сигналов переменного тока, генерируемых источником постоянного тока. Бесщеточный электродвигатель постоянного тока, фактически электродвигатель переменного тока, заменяет обычный щеточный электродвигатель постоянного тока во многих приложениях. И шаговый двигатель , цифровая версия двигателя, приводится в движение прямоугольными волнами переменного тока, опять же генерируемыми твердотельной схемой.На рисунке выше показано генеалогическое древо двигателей переменного тока, описанных в этой главе.
Круизные лайнеры и другие крупные суда заменяют карданные валы с редукторами большими многомегаваттными генераторами и двигателями. Так было с тепловозами меньшего масштаба в течение многих лет.
Рисунок 5.2 Диаграмма уровней моторной системы На системном уровне (рисунок выше) двигатель потребляет электрическую энергию в виде разности потенциалов и тока, преобразуя ее в механическую работу. К сожалению, электродвигатели не на 100% эффективны. Часть электроэнергии теряется на тепло, другой вид энергии, из-за потерь I2R (также называемых потерями в меди) в обмотках двигателя. Тепло — нежелательный побочный продукт этого преобразования. Его необходимо снимать с двигателя, так как это может отрицательно сказаться на долговечности. Таким образом, одна из целей — максимизировать КПД двигателя, уменьшая тепловые потери. Двигатели переменного тока также имеют некоторые потери, с которыми не сталкиваются двигатели постоянного тока: гистерезис и вихревые токи.
К сожалению, электродвигатели не на 100% эффективны. Часть электроэнергии теряется на тепло, другой вид энергии, из-за потерь I2R (также называемых потерями в меди) в обмотках двигателя. Тепло — нежелательный побочный продукт этого преобразования. Его необходимо снимать с двигателя, так как это может отрицательно сказаться на долговечности. Таким образом, одна из целей — максимизировать КПД двигателя, уменьшая тепловые потери. Двигатели переменного тока также имеют некоторые потери, с которыми не сталкиваются двигатели постоянного тока: гистерезис и вихревые токи.
Большинство двигателей переменного тока являются асинхронными.Асинхронные двигатели пользуются популярностью из-за их прочности и простоты. Фактически, 90% промышленных двигателей — это асинхронные двигатели.
Никола Тесла разработал основные принципы многофазного асинхронного двигателя в 1883 году и к 1888 году создал модель мощностью в половину лошадиных сил (400 Вт). Тесла продал права на производство Джорджу Вестингаузу за 65 000 долларов.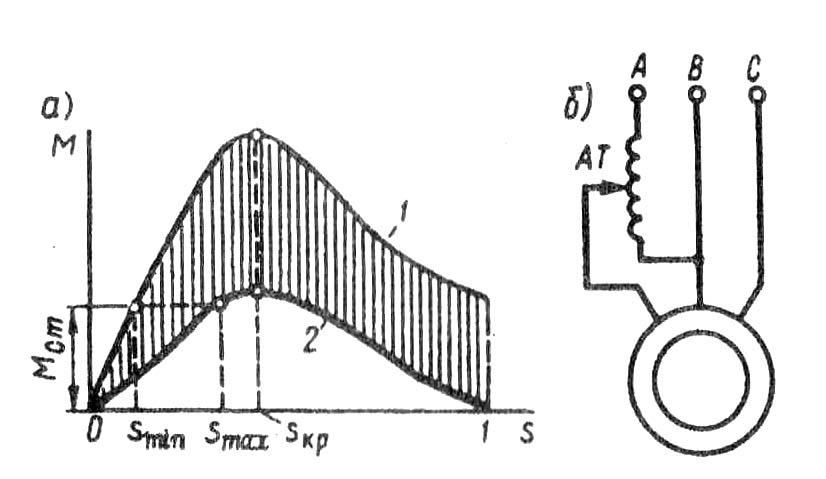 Наиболее крупные (> 1 л.с. или 1 кВт) промышленные двигатели многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени.На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока с щеткой.
Наиболее крупные (> 1 л.с. или 1 кВт) промышленные двигатели многофазные асинхронные двигатели . Под многофазностью мы подразумеваем, что статор содержит несколько различных обмоток на полюс двигателя, приводимых в действие соответствующими синусоидальными волнами со сдвигом во времени.На практике это две-три фазы. Крупные промышленные двигатели трехфазные. Хотя для простоты мы включили многочисленные иллюстрации двухфазных двигателей, мы должны подчеркнуть, что почти все многофазные двигатели являются трехфазными. Под асинхронным двигателем мы подразумеваем, что обмотки статора индуцируют ток в проводниках ротора, как трансформатор, в отличие от коллекторного двигателя постоянного тока с щеткой.
Конструкция асинхронного двигателя переменного тока
Асинхронный двигатель состоит из ротора, известного как якорь, и статора, содержащего обмотки, подключенные к многофазному источнику энергии, как показано на рисунке ниже.Простой двухфазный асинхронный двигатель, представленный ниже, похож на двигатель мощностью 1/2 лошадиные силы, который Никола Тесла представил в 1888 году.
Статор на рисунке выше намотан парами катушек, соответствующих фазам доступной электрической энергии. Статор двухфазного асинхронного двигателя выше имеет 2 пары катушек, по одной паре для каждой из двух фаз переменного тока. Отдельные катушки пары соединены последовательно и соответствуют противоположным полюсам электромагнита.То есть одна катушка соответствует N-полюсу, другая — S-полюсу, пока фаза переменного тока не изменит полярность. Другая пара катушек ориентирована в пространстве под углом 90 ° к первой паре. Эта пара катушек подключена к переменному току, сдвинутому во времени на 90 ° в случае двухфазного двигателя. Во времена Теслы источником двух фаз переменного тока был двухфазный генератор переменного тока. Статор на рисунке выше имеет выступающих полюсов, явно выступающих полюсов, которые использовались в ранних асинхронных двигателях Tesla. Эта конструкция используется и по сей день для двигателей с малой мощностью (<50 Вт).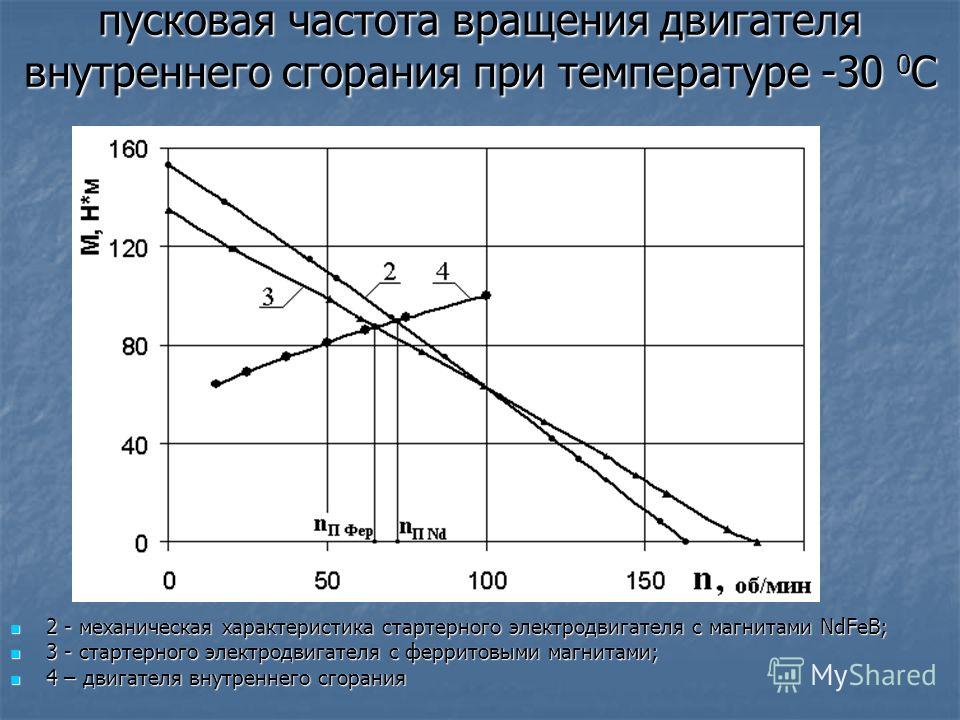 Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД будут иметь место, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Однако для более мощных двигателей меньшая пульсация крутящего момента и более высокий КПД будут иметь место, если катушки встроены в пазы, вырезанные в пластинах статора (рисунок ниже).
Пластины статора представляют собой тонкие изолированные кольца с прорезями, пробитыми из листов электротехнической стали. Набор из них закреплен концевыми винтами, которые также могут удерживать концевые кожухи.
Рисунок 5.5 Статор с обмотками 2-φ (а) и 3-φ (б)На рисунке выше обмотки двухфазного и трехфазного двигателей установлены в пазы статора.Катушки наматываются на внешнее приспособление, а затем вставляются в пазы. Изоляция, зажатая между периферией катушки и пазом, защищает от истирания. Фактические обмотки статора более сложны, чем отдельные обмотки на полюс на рисунке выше. Сравнивая двигатель 2-φ с двигателем Tesla 2-φ с явными полюсами, количество катушек такое же. В реальных больших двигателях обмотка полюса разделена на идентичные катушки, вставленные во множество пазов меньшего размера, чем указано выше. Эта группа называется фазовой лентой (см. Рисунок ниже).Распределенные катушки фазового пояса подавляют некоторые нечетные гармоники, создавая более синусоидальное распределение магнитного поля по полюсу. Это показано в разделе синхронного двигателя. В прорезях на краю стойки может быть меньше витков, чем в других прорезях. Краевые пазы могут содержать обмотки от двух фаз. То есть фазовые пояса перекрываются.
Рисунок 5.6 Перекрытие фазовых лентКлючом к популярности асинхронного двигателя переменного тока является его простота, о чем свидетельствует простой ротор (рисунок ниже).Ротор состоит из вала, стального пластинчатого ротора и встроенной короткозамкнутой клетки из меди или алюминия , показанной на (b), снятой с ротора. По сравнению с якорем двигателя постоянного тока, здесь нет коммутатора. Это устраняет щетки, искрение, искрение, графитовую пыль, регулировку и замену щеток, а также повторную обработку коллектора.
Рисунок 5.7 Многослойный ротор с (а) встроенной беличьей клеткой, (б) токопроводящей клеткой, удаленной с ротораПроводники в короткозамкнутой клетке могут быть перекошены, перекручены относительно вала.Несоосность пазов статора снижает пульсации крутящего момента. Сердечники ротора и статора состоят из пакета изолированных пластин. Пластины покрыты изолирующим оксидом или лаком для минимизации потерь на вихревые токи. Сплав, используемый в пластинах, выбран из соображений низких гистерезисных потерь.
Теория работы асинхронных двигателей
Краткое объяснение работы заключается в том, что статор создает вращающееся магнитное поле, которое волочит ротор. Теория работы асинхронных двигателей основана на вращающемся магнитном поле.Один из способов создания вращающегося магнитного поля — вращение постоянного магнита. Если движущиеся магнитные линии потока разрезают проводящий диск, он будет следовать за движением магнита. Линии магнитного потока, разрезающие проводник, будут индуцировать напряжение и, как следствие, ток в проводящем диске. Этот поток тока создает электромагнит, полярность которого противодействует движению постоянного магнита — Закон Ленца . Полярность электромагнита такова, что он притягивается к постоянному магниту.Диск следует с немного меньшей скоростью, чем постоянный магнит.
Рисунок 5.8 Вращающееся магнитное поле создает крутящий момент в проводящем диске Вращающееся магнитное поле создает крутящий момент в проводящем дискеКрутящий момент, развиваемый диском, пропорционален количеству линий магнитного потока, разрезающих диск, и скорости, с которой он разрезает диск. Если бы диск вращался с той же скоростью, что и постоянный магнит, не было бы ни потока, разрезающего диск, ни индуцированного тока, ни поля электромагнита, ни крутящего момента.Таким образом, скорость диска всегда будет ниже скорости вращающегося постоянного магнита, так что линии потока, разрезающие диск, индуцируют ток, создают электромагнитное поле в диске, которое следует за постоянным магнитом. Если к диску приложена нагрузка, замедляющая его, будет развиваться больший крутящий момент, поскольку больше линий магнитного потока разрезают диск. Крутящий момент пропорционален скольжению , степени, в которой диск отстает от вращающегося магнита. Большее скольжение соответствует большему потоку, разрезающему проводящий диск, создавая больший крутящий момент.В основе аналогового автомобильного вихретокового спидометра лежит принцип, проиллюстрированный выше. Когда диск удерживается пружиной, отклонение диска и иглы пропорционально скорости вращения магнита. Вращающееся магнитное поле создается двумя катушками, расположенными под прямым углом друг к другу, которые управляются токами, которые не совпадают по фазе на 90 °. Это не должно вызывать удивления, если вы знакомы с диаграммами Лиссажу на осциллографах.
Рисунок 5.9 В противофазе (90 °) синусоидальные волны образуют круговую диаграмму ЛиссажуСмещенные по фазе (90 °) синусоидальные волны образуют круговую диаграмму Лиссажу. На приведенном выше рисунке круговая диаграмма Лиссажу создается при подаче горизонтального и вертикального входных сигналов осциллографа с отклонением фазы синусоидальных волн на 90 °.Начиная с (a) с максимальным отклонением «X» и минимальным «Y», след перемещается вверх и влево в направлении (b). Между (a) и (b) две формы волны равны 0,707 Vpk при 45 °. Эта точка (0,707, 0,707) попадает на радиус круга между (a) и (b). Трасса перемещается в (b) с минимальным отклонением «X» и максимальным «Y». При максимальном отрицательном отклонении «X» и минимальном отклонении «Y» след переместится в (c). Затем с минимальным «X» и максимальным отрицательным «Y» он переходит в (d), а затем обратно в (a), завершая один цикл.
Рисунок 5.10 Окружность синуса по оси X и косинуса по оси YНа рисунке показаны две синусоидальные волны с фазовым сдвигом на 90 °, приложенные к отклоняющим пластинам осциллографа, расположенным под прямым углом в пространстве. Комбинация фазированных синусоидальных волн на 90 ° и отклонения под прямым углом дает двумерный узор — круг. Этот круг очерчен электронным лучом, вращающимся против часовой стрелки.
Полная скорость двигателя и скорость синхронного двигателя
Скорость вращения вращающегося магнитного поля статора связана с количеством пар полюсов на фазу статора.На приведенном ниже рисунке «полная скорость» всего шесть полюсов или три пары полюсов и три фазы. Однако на каждую фазу приходится только одна пара полюсов. Магнитное поле будет вращаться один раз за цикл синусоидальной волны. В случае мощности 60 Гц поле вращается со скоростью 60 раз в секунду или 3600 оборотов в минуту (об / мин). При мощности 50 Гц он вращается со скоростью 50 оборотов в секунду или 3000 об / мин. 3600 и 3000 об / мин — это синхронная скорость двигателя. Хотя ротор асинхронного двигателя никогда не достигает этой скорости, это определенно верхний предел.Если мы удвоим количество полюсов двигателя, синхронная скорость сократится вдвое, потому что магнитное поле вращается в пространстве на 180 ° на 360 ° электрической синусоидальной волны.
Рисунок 5.11 Удвоение полюсов статора уменьшает синхронную скорость вдвоеСинхронная скорость определяется по формуле:
[латекс] N_s = \ frac {120 \ cdot f} {P} [/ латекс]
Где:
Н с = Скорость магнитного поля (об / мин)
f = частота подаваемой мощности (Гц)
P = общее количество полюсов на фазу, кратное 2
На приведенном выше рисунке «половинная скорость» четыре полюса на фазу (3 фазы).Синхронная скорость для мощности 50 Гц составляет: S = 120 · 50/4 = 1500 об / мин
Краткое объяснение асинхронного двигателя состоит в том, что вращающееся магнитное поле, создаваемое статором, увлекает за собой ротор. Более длинное и более правильное объяснение состоит в том, что магнитное поле статора индуцирует переменный ток в проводниках короткозамкнутого ротора, которые составляют трансформатор вторичный. Этот индуцированный ток ротора, в свою очередь, создает магнитное поле. Магнитное поле вращающегося статора взаимодействует с этим полем ротора.Поле ротора пытается выровняться с полем вращающегося статора. Результат — вращение ротора с короткозамкнутым ротором. Если бы не было механической нагрузки крутящего момента двигателя, подшипников, сопротивления ветра или других потерь, ротор вращался бы с синхронной скоростью. Однако проскальзывание между ротором и полем статора синхронной скорости развивает крутящий момент. Именно магнитный поток, разрезающий проводники ротора при его проскальзывании, создает крутящий момент. Таким образом, нагруженный двигатель будет скользить пропорционально механической нагрузке.Если бы ротор работал с синхронной скоростью, не было бы потока статора, режущего ротор, не было бы тока, индуцированного в роторе, не было бы крутящего момента.
Крутящий момент в асинхронных двигателях
При первой подаче питания на двигатель ротор находится в состоянии покоя, а магнитное поле статора вращается с синхронной скоростью N s . Поле статора режет ротор с синхронной скоростью N s . Ток, индуцированный в закороченных витках ротора, является максимальным, как и частота тока, частота сети.По мере увеличения скорости ротора скорость, с которой магнитный поток статора сокращает ротор, представляет собой разницу между синхронной скоростью N s и фактической скоростью N ротора, или (N s — N). Отношение фактического потока, разрезающего ротор, к синхронной скорости определяется как скольжение :
[латекс] s = \ frac {(N_s — N)} {N_s} [/ латекс]
Где:
Н с = синхронная скорость
N = частота вращения ротора
Частота тока, наведенного в проводники ротора, равна только частоте сети при пуске двигателя и уменьшается по мере приближения ротора к синхронной скорости. Частота ротора определяется по:
[латекс] f_r = s \ cdot f [/ латекс]
Где:
с = скольжение,
f = частота сети статора
Скольжение при 100% крутящем моменте обычно составляет 5% или меньше в асинхронных двигателях. Таким образом, для частоты сети f = 50 Гц частота наведенного тока в роторе:
f r = S (f)
= 0,05 (50 Гц)
= 2,5 Гц.
Почему он такой низкий? Магнитное поле статора вращается с частотой 50 Гц.Скорость вращения ротора на 5% меньше. Вращающееся магнитное поле режет ротор только с частотой 2,5 Гц. 2,5 Гц — это разница между синхронной скоростью и фактической скоростью ротора. Если ротор вращается немного быстрее при синхронной скорости, поток вообще не будет резать ротор, f r = 0.
Рисунок 5.12 Зависимость крутящего момента и скорости от% скольжения.На приведенном выше графике показано, что пусковой крутящий момент, известный как крутящий момент заторможенного ротора (T LR ), превышает 100% крутящего момента при полной нагрузке (T FL ), безопасного продолжительного крутящего момента.Крутящий момент заблокированного ротора составляет около 175% от T FL для приведенного выше примера двигателя. Пусковой ток, известный как , ток заторможенного ротора (I LR ) составляет 500% от тока полной нагрузки (I FL ), безопасного рабочего тока. Сила тока велика, потому что это аналог закороченной вторичной обмотки трансформатора. Когда ротор начинает вращаться, крутящий момент может немного уменьшиться для определенных классов двигателей до значения, известного как тяговый момент . Это самое низкое значение крутящего момента, с которым когда-либо сталкивался пусковой двигатель.Когда ротор набирает 80% синхронной скорости, крутящий момент увеличивается со 175% до 300% крутящего момента полной нагрузки. Этот крутящий момент пробоя (T BD ) происходит из-за большего, чем обычно, 20% скольжения. Сила тока в этот момент уменьшилась лишь незначительно, но после этого будет быстро уменьшаться. Когда ротор ускоряется с точностью до нескольких процентов от синхронной скорости, как крутящий момент, так и ток значительно уменьшаются. При нормальной работе скольжение будет составлять всего несколько процентов. Для работающего двигателя любой участок кривой крутящего момента ниже 100% номинального крутящего момента является нормальным.Нагрузка двигателя определяет рабочую точку на кривой крутящего момента. В то время как крутящий момент и ток двигателя могут превышать 100% в течение нескольких секунд во время запуска, продолжительная работа выше 100% может привести к повреждению двигателя. Любая крутящая нагрузка двигателя, превышающая крутящий момент пробоя, приведет к остановке двигателя. Крутящий момент, скольжение и ток будут приближаться к нулю в условиях нагрузки «без механического крутящего момента». Это условие аналогично разомкнутому вторичному трансформатору. Существует несколько основных конструкций асинхронных двигателей, которые значительно отличаются от кривой крутящего момента, приведенной выше.Различные конструкции оптимизированы для запуска и работы с различными типами нагрузок. Крутящий момент заблокированного ротора (T LR ) для двигателей различных конструкций и размеров составляет от 60% до 350% момента полной нагрузки (T FL ). Пусковой ток или ток заторможенного ротора (I LR ) может находиться в диапазоне от 500% до 1400% от тока полной нагрузки (I FL ). Этот потребляемый ток может вызвать проблемы с запуском больших асинхронных двигателей.
Классы двигателей NEMA и IEC
Различные стандартные классы (или конструкции) двигателей, соответствующие кривым крутящего момента (рисунок ниже), были разработаны для лучшего управления нагрузками различных типов.Национальная ассоциация производителей электрооборудования (NEMA) определила классы двигателей A, B, C и D для удовлетворения этих требований к приводам. Аналогичные классы N и H Международной электротехнической комиссии (IEC) соответствуют конструкциям NEMA B и C соответственно.
Рисунок 5.13 Характеристики для проектов NEMAХарактеристики для проектов NEMA
Все двигатели, за исключением класса D, работают со скольжением 5% или менее при полной нагрузке.
- Класс B (IEC Class N) Двигатели используются по умолчанию в большинстве приложений.При пусковом моменте LRT = от 150% до 170% от FLT он может запускать большинство нагрузок без чрезмерного пускового тока (LRT). КПД и коэффициент мощности высокие. Обычно он приводит в действие насосы, вентиляторы и станки.
- Класс A пусковой момент такой же, как у класса B. Отпускаемый момент и пусковой ток (LRT) выше. Этот двигатель справляется с кратковременными перегрузками, которые встречаются в машинах для литья под давлением.
- Класс C (IEC Class H) имеет более высокий пусковой момент, чем классы A и B при LRT = 200% от FLT.Этот двигатель применяется для тяжелых пусковых нагрузок, которые необходимо приводить в действие с постоянной скоростью, таких как конвейеры, дробилки, поршневые насосы и компрессоры.
- Класс D Двигатели имеют самый высокий пусковой момент (LRT) в сочетании с низким пусковым током из-за высокого скольжения (от 5% до 13% при FLT). Высокое скольжение приводит к более низкой скорости. Регулировка скорости плохая. Тем не менее, двигатель отлично справляется с нагрузками с переменной скоростью, например с маховиком для аккумулирования энергии. Применения включают пробивные прессы, ножницы и подъемники.
- Класс E Двигатели — это более эффективная версия класса B.
- Класс F Двигатели имеют гораздо более низкие LRC, LRT и крутящий момент, чем у класса B. Они управляют постоянными, легко запускаемыми нагрузками.
Коэффициент мощности асинхронных двигателей
Асинхронные двигатели имеют отстающий (индуктивный) коэффициент мощности от линии электропередачи. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%.Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности.
Рисунок 5.14 Коэффициент мощности и КПД асинхронного двигателяКПД асинхронного двигателя
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным.Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД страдает лишь незначительно до 25% FLT.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности (PFC) в качестве энергосберегающего устройства для однофазных асинхронных двигателей в конце 1970-х годов. Он основан на предположении, что асинхронный двигатель с неполной нагрузкой менее эффективен и имеет более низкий коэффициент мощности, чем двигатель с полной нагрузкой. Таким образом, можно сэкономить энергию в частично загруженных двигателях, в частности, в двигателях 1-φ. Энергия, потребляемая для поддержания магнитного поля статора, относительно фиксирована по отношению к изменениям нагрузки.Хотя в полностью загруженном двигателе экономить нечего, напряжение на частично загруженном двигателе может быть уменьшено, чтобы уменьшить энергию, необходимую для поддержания магнитного поля. Это повысит коэффициент мощности и эффективность. Это была хорошая концепция для заведомо неэффективных однофазных двигателей, для которых она предназначалась. Эта концепция не очень применима к большим трехфазным двигателям. Из-за их высокого КПД (90% +) экономия энергии невелика. Более того, двигатель с КПД 95% по-прежнему имеет КПД 94% при 50% крутящем моменте при полной нагрузке (FLT) и 90% КПД при 25% FLT.Потенциальная экономия энергии при переходе от 100% FLT к 25% FLT составляет разницу в эффективности 95% — 90% = 5%. Это не 5% мощности при полной нагрузке, а 5% мощности при пониженной нагрузке. Корректор коэффициента мощности Nola может быть применим к 3-фазному двигателю, который большую часть времени простаивает (ниже 25% FLT), например к пробивному прессу. Срок окупаемости дорогостоящего электронного контроллера был оценен как непривлекательный для большинства приложений. Хотя он может быть экономичным в составе электронного пускателя двигателя или регулятора скорости.Асинхронный двигатель может работать как генератор переменного тока, если это привод
.Асинхронные двигатели в качестве генераторов переменного тока
Асинхронный двигатель может работать как генератор переменного тока, если он приводится в движение крутящим моментом, превышающим 100% синхронной скорости (рисунок ниже). Это соответствует нескольким% «отрицательного» скольжения, скажем, -1%. Это означает, что, поскольку мы вращаем двигатель быстрее, чем синхронная скорость, ротор продвигается на 1% быстрее, чем вращающееся магнитное поле статора. Обычно он отстает в двигателе на 1%.Поскольку ротор разрезает магнитное поле статора в противоположном направлении (впереди), ротор индуцирует напряжение в статоре, возвращая электрическую энергию обратно в линию электропередачи.
Рисунок 5.15 Отрицательный крутящий момент превращает асинхронный двигатель в генераторТакой индукционный генератор должен возбуждаться «живым» источником мощностью 50 или 60 Гц. В случае сбоя в электроснабжении энергокомпании выработка электроэнергии невозможна. Этот тип генератора не подходит в качестве резервного источника питания.Преимущество ветряного генератора вспомогательной энергии состоит в том, что он не требует автоматического выключателя отключения питания для защиты ремонтных бригад. Это безотказно.
Небольшие удаленные (от электросети) установки могут быть выполнены с самовозбуждением путем размещения конденсаторов параллельно фазам статора. Если снять нагрузку, остаточный магнетизм может вызвать небольшой ток. Этот ток может протекать через конденсаторы без рассеивания мощности. Когда генератор достигает полной скорости, ток увеличивается, чтобы подать ток намагничивания на статор.В этот момент может быть приложена нагрузка. Слабое регулирование напряжения. Асинхронный двигатель может быть преобразован в генератор с самовозбуждением путем добавления конденсаторов.
Процедура запуска заключается в доведении ветряной турбины до скорости в двигательном режиме путем подачи на статор нормального напряжения линии электропередачи. Любая вызванная ветром скорость турбины, превышающая синхронную, будет развивать отрицательный крутящий момент, возвращая мощность в линию электропередачи, изменяя нормальное направление электрического счетчика киловатт-часов.В то время как асинхронный двигатель представляет отстающий коэффициент мощности для линии электропередачи, асинхронный генератор переменного тока представляет собой ведущий коэффициент мощности. Индукционные генераторы не используются широко на обычных электростанциях. Скорость привода паровой турбины является постоянной и регулируемой в соответствии с требованиями синхронных генераторов переменного тока. Синхронные генераторы также более эффективны.
Скорость ветряной турбины трудно контролировать, и скорость ветра может изменяться порывами. Асинхронный генератор лучше справляется с этими колебаниями из-за собственного проскальзывания.Это меньше нагружает зубчатую передачу и механические компоненты, чем синхронный генератор. Однако это допустимое изменение скорости составляет всего около 1%. Таким образом, индукционный генератор, подключенный к прямой линии, считается ветряной турбиной с фиксированной скоростью (см. Асинхронный генератор с двойным питанием для истинного генератора переменного тока с регулируемой скоростью). Несколько генераторов или несколько обмоток на общем валу можно переключать для обеспечения высокой и низкой скорости, чтобы приспособиться к переменным ветровым условиям.
Асинхронные двигатели с несколькими полями
Асинхронные двигателимогут содержать несколько обмоток возбуждения, например, 4-полюсную и 8-полюсную обмотки, соответствующие синхронным скоростям вращения 1800 и 900 об / мин.Подать питание на то или иное поле менее сложно, чем на повторное подключение катушек статора.
Рисунок 5.16 Несколько полей позволяют изменять скоростьЕсли поле сегментировано с выведенными выводами, оно может быть изменено (или переключено) с 4-полюсного на 2-полюсное, как показано выше для 2-фазного двигателя. Сегменты 22,5 ° переключаются на сегменты 45 °. Для ясности выше показана только проводка для одной фазы. Таким образом, наш асинхронный двигатель может работать на нескольких скоростях. При переключении вышеуказанного двигателя 60 Гц с 4 полюсов на 2 полюса синхронная скорость увеличивается с 1800 до 3600 об / мин.
Q: Если двигатель приводится в движение частотой 50 Гц, каковы будут соответствующие 4-полюсные и 2-полюсные синхронные скорости?
А:
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {4} [/ latex] [latex] = 1500 об / мин (4-полюсный) [ / латекс]
[латекс] N_s = \ frac {120f} {P} [/ latex] [latex] N_s = \ frac {120 * 50Hz} {2} [/ latex] [latex] = 3000 об / мин (2-полюсный) [ / латекс]
Асинхронные двигатели с переменным напряжением
Скорость малых асинхронных двигателей с короткозамкнутым ротором для таких применений, как приводные вентиляторы, может быть изменена путем снижения сетевого напряжения.Это снижает крутящий момент, доступный нагрузке, что снижает скорость (см. Рисунок ниже).
Рисунок 5.17 Регулирование переменного напряжения, скорость асинхронного двигателяЭлектронное регулирование скорости в асинхронных двигателях
Современная полупроводниковая электроника расширяет возможности управления скоростью. Изменяя сетевую частоту 50 или 60 Гц на более высокие или более низкие значения, можно изменить синхронную скорость двигателя. Однако уменьшение частоты тока, подаваемого на двигатель, также снижает реактивное сопротивление X L , что увеличивает ток статора.Это может привести к насыщению магнитной цепи статора с катастрофическими последствиями. На практике напряжение на двигателе необходимо уменьшать при уменьшении частоты.
Рисунок 5.18 Электронный частотно-регулируемый приводИ наоборот, частота привода может быть увеличена для увеличения синхронной скорости двигателя. Однако необходимо увеличить напряжение, чтобы преодолеть увеличивающееся реактивное сопротивление, чтобы поддерживать ток на уровне нормального значения и поддерживать крутящий момент. Инвертор приближает синусоидальные волны к двигателю с помощью выходов с широтно-импульсной модуляцией.Это прерывистый сигнал, который может быть включен или выключен, высокий или низкий, процент времени включения соответствует мгновенному напряжению синусоидальной волны.
Когда для управления асинхронным двигателем применяется электроника, становится доступно множество методов управления, от простых до сложных:
- Скалярное управление: Описанный выше недорогой метод управления только напряжением и частотой без обратной связи.
- Векторное управление: Также известно как векторное управление фазой.Компоненты тока статора, создающие магнитный поток и крутящий момент, измеряются или оцениваются в реальном времени для улучшения кривой крутящего момента двигателя. Это требует больших вычислений.
- Прямое управление крутящим моментом: Продуманная адаптивная модель двигателя обеспечивает более прямое управление магнитным потоком и крутящим моментом без обратной связи. Этот метод быстро реагирует на изменения нагрузки.
- Многофазный асинхронный двигатель состоит из многофазной обмотки, встроенной в многослойный статор, и проводящей короткозамкнутой клетки, встроенной в многослойный ротор.
- Трехфазные токи, протекающие внутри статора, создают вращающееся магнитное поле, которое индуцирует ток и, следовательно, магнитное поле в роторе. Крутящий момент ротора развивается, когда ротор немного проскальзывает за вращающимся полем статора.
- В отличие от однофазных двигателей, многофазные асинхронные двигатели самозапускаются.
- Пускатели двигателей минимизируют нагрузку на линию питания, обеспечивая при этом больший пусковой крутящий момент, чем требуется во время работы.Снижение линейного тока Пускатели требуются только для больших двигателей.
- Трехфазные двигатели при запуске будут работать от однофазных.
- Статический преобразователь фазы — это трехфазный двигатель, работающий на одной фазе без нагрузки на вал, генерирующий трехфазный выходной сигнал.
- Несколько обмоток возбуждения можно перемонтировать для работы с несколькими дискретными скоростями двигателя, изменив количество полюсов.
Трехфазный двигатель может работать от однофазного источника питания.Однако он не запускается самостоятельно. Его можно запустить вручную в любом направлении, набрав скорость за несколько секунд. Он будет развивать только 2/3 номинальной мощности 3-φ, потому что одна обмотка не используется.
Рисунок 5.19 Двигатель 3-фазн. Питается от 1-фазного тока, но не запускается.Одинарная катушка однофазного двигателя
Одиночная катушка однофазного асинхронного двигателя создает не вращающееся магнитное поле, а пульсирующее поле, достигающее максимальной напряженности при электрическом напряжении 0 ° и 180 °.
Рисунок 5.20 Однофазный статор создает невращающееся пульсирующее магнитное полеДругая точка зрения состоит в том, что одиночная катушка, возбуждаемая однофазным током, создает два вектора магнитного поля, вращающихся в противоположных направлениях, совпадающих дважды за оборот при 0 ° (рисунок выше-a) и 180 ° (рисунок e). Когда векторы поворачиваются на 90 ° и -90 °, они отменяются на рисунке c. При 45 ° и -45 ° (рисунок b) они частично складываются по оси + x и сокращаются по оси y. Аналогичная ситуация существует на рисунке d.Сумма этих двух векторов — это вектор, стационарный в пространстве, но чередующийся во времени. Таким образом, пусковой крутящий момент не создается.
Однако, если ротор вращается вперед со скоростью немного меньшей, чем синхронная скорость, он будет развивать максимальный крутящий момент при 10% скольжении относительно вектора прямого вращения. Меньший крутящий момент будет развиваться выше или ниже 10% скольжения. Ротор будет испытывать скольжение на 200-10% относительно вектора магнитного поля, вращающегося в противоположных направлениях. Небольшой крутящий момент (см. Кривую зависимости крутящего момента от скольжения), за исключением двукратной пульсации частоты, создается вектором, вращающимся в противоположных направлениях.Таким образом, однофазная катушка будет развивать крутящий момент после запуска ротора. Если ротор запускается в обратном направлении, он будет развивать такой же большой крутящий момент, поскольку он приближается к скорости вращающегося в обратном направлении вектора.
Однофазные асинхронные двигатели имеют медную или алюминиевую короткозамкнутую клетку, встроенную в цилиндр из стальных пластин, типичных для многофазных асинхронных двигателей.
Двигатель с постоянным разделением конденсаторов
Одним из способов решения проблемы с однофазным двигателем является создание двухфазного двигателя, получающего двухфазное питание от однофазного.Для этого требуется двигатель с двумя обмотками, разнесенными друг от друга на 90 ° , электрический, питаемый двумя фазами тока, смещенными во времени на 90 ° . Это называется конденсаторным двигателем с постоянным разделением.
Рисунок 5.21 Асинхронный двигатель с постоянным разделением конденсаторов Асинхронный двигатель с постоянным разделением конденсаторовЭтот тип двигателя подвержен увеличению величины тока и сдвигу во времени назад, когда двигатель набирает скорость, с пульсациями крутящего момента на полной скорости. Решение состоит в том, чтобы конденсатор (импеданс) оставался небольшим, чтобы минимизировать потери.Потери меньше, чем у двигателя с экранированными полюсами. Эта конфигурация двигателя хорошо работает до 1/4 лошадиных сил (200 Вт), хотя обычно применяется к двигателям меньшего размера. Направление двигателя легко изменить, включив конденсатор последовательно с другой обмоткой. Этот тип двигателя может быть адаптирован для использования в качестве серводвигателя, описанного в другом месте этой главы.
Рисунок 5.22 Однофазный асинхронный двигатель со встроенными катушками статораОднофазные асинхронные двигатели могут иметь катушки, встроенные в статор для двигателей большего размера.Тем не менее, меньшие размеры требуют менее сложных для создания концентрированных обмоток с выступающими полюсами.
Асинхронный двигатель с конденсаторным пуском
На рисунке ниже конденсатор большего размера может использоваться для запуска однофазного асинхронного двигателя через вспомогательную обмотку, если он отключается центробежным переключателем, когда двигатель набирает обороты. Кроме того, во вспомогательной обмотке может быть намного больше витков из более тяжелого провода, чем в двигателе с разделенной фазой сопротивления, чтобы уменьшить чрезмерное повышение температуры.В результате для таких тяжелых нагрузок, как компрессоры кондиционеров, доступен больший пусковой крутящий момент. Эта конфигурация двигателя работает настолько хорошо, что доступна в многомощных (несколько киловаттных) размерах.
Рисунок 5.23 Асинхронный двигатель с конденсаторным пускомАсинхронный двигатель с конденсаторным двигателем
Вариант двигателя с конденсаторным пуском (рисунок ниже) заключается в запуске двигателя с относительно большим конденсатором для высокого пускового момента, но после запуска оставляют конденсатор меньшей емкости на месте, чтобы улучшить рабочие характеристики, не потребляя при этом чрезмерного тока.Дополнительная сложность конденсаторного двигателя оправдана для двигателей большего размера.
Рисунок 5.24 Асинхронный двигатель с конденсаторным двигателемПусковой конденсатор двигателя может быть неполярным электролитическим конденсатором с двойным анодом, который может представлять собой два последовательно соединенных поляризованных электролитических конденсатора + к + (или — к -). Такие электролитические конденсаторы переменного тока имеют такие высокие потери, что их можно использовать только в прерывистом режиме (1 секунда во включенном состоянии, 60 секунд в выключенном состоянии), например, при запуске двигателя. Конденсатор для работы двигателя должен иметь не электролитическую конструкцию, а полимерный конденсатор с более низкими потерями.
Асинхронный двигатель с двухфазным электродвигателем с сопротивлением
Если во вспомогательной обмотке намного меньше витков, меньший провод размещен под углом 90 ° к главной обмотке, он может запустить однофазный асинхронный двигатель. При более низкой индуктивности и более высоком сопротивлении ток будет испытывать меньший фазовый сдвиг, чем основная обмотка. Может быть получено около 30 ° разности фаз. Эта катушка создает умеренный пусковой крутящий момент, который отключается центробежным переключателем на 3/4 синхронной скорости.Эта простая (без конденсатора) конструкция хорошо подходит для двигателей мощностью до 1/3 лошадиных сил (250 Вт), управляющих легко запускаемыми нагрузками.
Рисунок 5.25 Сопротивление асинхронного двигателя с расщепленной фазойЭтот двигатель имеет больший пусковой крутящий момент, чем двигатель с экранированными полюсами (следующий раздел), но не такой большой, как двухфазный двигатель, построенный из тех же частей. Плотность тока во вспомогательной обмотке настолько высока во время пуска, что последующий быстрый рост температуры исключает частый перезапуск или медленные пусковые нагрузки.
Корректор коэффициента мощности Nola
Фрэнк Нола из НАСА предложил корректор коэффициента мощности для повышения эффективности асинхронных двигателей переменного тока в середине 1970-х годов. Он основан на предположении, что асинхронные двигатели неэффективны при нагрузке ниже полной. Эта неэффективность коррелирует с низким коэффициентом мощности. Коэффициент мощности меньше единицы возникает из-за тока намагничивания, необходимого для статора. Этот фиксированный ток составляет большую долю от общего тока двигателя при уменьшении нагрузки двигателя.При небольшой нагрузке полный ток намагничивания не требуется. Его можно уменьшить, уменьшив подаваемое напряжение, улучшив коэффициент мощности и КПД. Корректор коэффициента мощности определяет коэффициент мощности и снижает напряжение двигателя, тем самым восстанавливая более высокий коэффициент мощности и уменьшая потери.
Поскольку однофазные двигатели примерно в 2–4 раза менее эффективны, чем трехфазные двигатели, существует потенциальная экономия энергии для двигателей 1-φ. Для полностью нагруженного двигателя нет экономии, поскольку требуется весь ток намагничивания статора.Напряжение не может быть уменьшено. Но есть потенциальная экономия от менее чем полностью загруженного двигателя. Двигатель с номинальным напряжением 117 В переменного тока рассчитан на работу при напряжении от 127 В переменного тока до 104 В переменного тока. Это означает, что он не полностью загружен при работе при напряжении более 104 В переменного тока, например, при работе холодильника на 117 В переменного тока. Контроллер коэффициента мощности может безопасно снизить сетевое напряжение до 104–110 В переменного тока. Чем выше начальное напряжение в сети, тем больше потенциальная экономия. Конечно, если энергокомпания подаст напряжение ближе к 110 В переменного тока, двигатель будет работать более эффективно без каких-либо дополнительных устройств.
Любой практически неработающий однофазный асинхронный двигатель с 25% FLC или менее является кандидатом на использование PFC. Однако он должен работать большое количество часов в год. И чем больше времени он простаивает, как на пилораме, штамповочном прессе или конвейере, тем выше вероятность оплаты контроллера через несколько лет эксплуатации. За него должно быть втрое легче платить по сравнению с более эффективным 3-φ-двигателем. Стоимость PFC не может быть возмещена для двигателя, работающего всего несколько часов в день.
Резюме: Однофазные асинхронные двигатели
- Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 ° . После запуска вспомогательная обмотка необязательна.
- Вспомогательная обмотка конденсаторного двигателя с постоянным разделением каналов имеет конденсатор, включенный последовательно с ней во время пуска и работы.
- Асинхронный двигатель с конденсаторным запуском имеет только конденсатор, включенный последовательно со вспомогательной обмоткой во время запуска.
- Конденсаторный двигатель обычно имеет большой неполяризованный электролитический конденсатор, включенный последовательно со вспомогательной обмоткой для запуска, а затем меньший неэлектролитический конденсатор во время работы.
- Вспомогательная обмотка двигателя с сопротивлением с разделенной фазой развивает разность фаз по сравнению с основной обмоткой во время пуска из-за разницы в сопротивлении.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки.В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения. положительный.В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора за мгновение t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, передаваемый от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Электрическая революция | Производство. По некоторым оценкам, электродвигатели и связанные с ними компоненты потребляют почти 50 процентов от общего потребления энергии в США. Это ошеломляющее число, и это частично неизбежно из-за неотъемлемой функции электродвигателя, но многие из систем, используемых сегодня, являются ужасно неэффективно.К счастью, сочетание регулирующего контроля и конкурентных инноваций, производители электродвигателей, частотно-регулируемых приводов и коробок передач — вместе со всеми другими компонентами для создания моторизованной «системы» — подняли эффективность выше того, что ранее считалось возможным.
Дин Нейнхейс, директор по маркетингу компании Marathon Electric, объясняет основы нормативно-правовой среды, касающейся систем с электрическим приводом, в новейшей истории: «В США в 1997 году вступил в силу закон, который назывался EPACT.В 2007 году они приняли следующую версию, которая была известна как EISA 2007. Этот закон требовал единственного постепенного скачка эффективности для двигателей от 0 до 200 лошадиных сил ». EISA 2007 предписало так называемые электродвигатели NEMA Premium, которые вынудили производителей электродвигателей вводить новшества и находить новые способы выжать из своей продукции последнюю каплю эффективности.
Но больше медного провода можно только пока. Простое добавление материала внутрь двигателя может повысить его эффективность, но производители быстро столкнулись с принципом уменьшения отдачи в сочетании с резким ростом цен.К счастью, эти компании внедрили инновации, выходящие за рамки традиционного строительства на основе меди. «Если бы вы … удалили всю медь из ротора и вместо этого поместили в этот ротор высокоэнергетические редкоземельные неодимовые магниты, то теперь ротор имеет неподвижный магнетизм», — говорит Нейнхейс. «Все, что вам нужно сделать, это заставить его двигаться в правильном направлении, и ротор помогает сам по себе. Это дает вам скачок эффективности. Это называется PMAC — постоянный магнит переменного тока. Их также иногда называют «бесщеточными двигателями».’” Эти двигатели изготовлены в соответствии со стандартами EISA 2007.
В любом случае, Джон Малиновски, старший менеджер по продукции Baldor Electric, говорит, что важно искать в правильных местах: «Пользователь должен искать логотип NEMA Premium® для трехфазных двигателей мощностью от 1 до 500 л.с. уровни эффективности. По возможности следует избегать однофазных двигателей, поскольку они не так [эффективны], как трехфазные ».
Джон Литл, инженер-технолог Grove Gear, отмечает, что двигатели — не единственный компонент системы с электрическим приводом, эффективность которого значительно повышается.Коробка передач является критически важной частью любой системы и часто является причиной серьезных потерь в эффективности. Литл объясняет: «В сегодняшних промышленных условиях наиболее распространенной формой прямоугольных редукторов скорости являются неэффективные червячные редукторы. Этот единственный компонент, эффективность которого может составлять менее 50 процентов, играет решающую роль в общей эффективности системы передачи электроэнергии. Из-за своего вклада в общее энергопотребление системы высокоэффективные зубчатые передачи, такие как Grove Gear E Series, становятся необходимостью.Благодаря использованию конической зубчатой передачи эти новые системы могут стабильно передавать мощность на 90% во всех передаточных числах. В сочетании с тем фактом, что они заменяют червячные редукторы с несколькими межосевыми расстояниями, они представляют собой эффективное решение, которое может принести огромные преимущества без каких-либо проблем ».
Согласно Neinhuis, в «идеальном мире» все компоненты в примерной системе — от линии до частотно-регулируемого привода, двигателя, коробки передач и т. Д. — будут иметь КПД 99%. После соединения всех компонентов эффективность снижается до 94.2 процента, что является наилучшим результатом с учетом минутной неэффективности каждого компонента. Если хотя бы одному компоненту не хватает эффективности — например, коробке передач — 75 процентов, — общий КПД системы упадет до ничтожных 71,3 процента. Из-за накапливающегося падения эффективности для производителей очень важно обеспечить максимальную эффективность всех компонентов их систем с электрическим приводом.
Имея это в виду, как производитель может повысить эффективность своих систем с электрическим приводом? Во-первых, они могут модернизировать низкоэффективные компоненты на современные, высокоэффективные или полностью исключить компоненты.
Литл утверждает, что во многих случаях лучше заменить коробку передач системы, прежде чем даже рассматривать двигатель. Он говорит: «Заменив неэффективную коробку передач, вы потенциально можете сэкономить сотни долларов в год. Благодаря более эффективной передаче энергии это действие может также предоставить возможность уменьшить размер необходимого двигателя, что способствует экономии энергии ».
Замена может быть такой же простой, как установка новой коробки передач, если вы проведете исследование и купите с умом. Несколько производителей редукторов разрабатывают новые системы, такие как Grove Gear E-Series, которые можно заказать для беспрепятственной замены старой, неэффективной системы червячных редукторов.
Marathon Electric, с другой стороны, усердно работает над созданием новых систем, направленных на полное устранение неэффективных компонентов. Благодаря возможности более непосредственной привязки двигателей к последнему компоненту — например, конвейеру — значительно более высокий процент входной мощности фактически используется для движения, а не тратится впустую. Конечно, эти нововведения, вероятно, потребуют более полного капитального ремонта по сравнению, например, с заменой коробки передач, поэтому каждый производитель должен соответственно взвесить стоимость и необходимые цифры времени простоя.
Компания Baldor Electric также занимается разработкой новых систем, направленных на повышение эффективности систем градирен с электрическим приводом за счет отказа от традиционных механических зубчатых передач или понижения скорости ременного привода и включения регулятора скорости. Благодаря уже эффективному двигателю с постоянными магнитами VS1CTD может помочь производителям значительно сэкономить на количестве энергии, необходимой для поддержания работы их систем.
Посредством замены компонентов или капитального ремонта системы обновление старых, неэффективных систем позволяет любому процессу работать более эффективно, что напрямую означает снижение энергопотребления.Капитальные закупки могут обеспечить окупаемость инвестиций за месяцы, а не за годы, а инженеры могут упростить свои системы, чтобы сэкономить время на профилактическое и текущее обслуживание в будущем. Если вы оплакиваете счет за электроэнергию на своем заводе, пора честно взглянуть на ваши электрические системы — они, вероятно, далеко не так эффективны, как вы думаете или надеетесь.
Институт — История — Изобретение электродвигателя 1800-1854
Унив. Проф. Доктор-Ing. Мартин Доппельбауэр
СводкаС изобретением батареи (Алессандро Вольта, 1800 г.), генерации магнитного поля из электрического тока (Ганс Кристиан Эрстед, 1820 г.) и электромагнита (Уильям Стерджен, 1825 г.) был заложен фундамент для создания электродвигателей. В то время еще оставалось открытым вопрос, должны ли электродвигатели быть вращающимися или возвратно-поступательными машинами, то есть имитировать шток плунжера паровой машины.
Во всем мире многие изобретатели работали параллельно над этой задачей — это была проблема «моды». Новые явления открывались почти ежедневно. Изобретения в области электротехники и ее приложений витали в воздухе.
Часто изобретатели ничего не знали друг о друге и самостоятельно разрабатывали подобные решения. Соответствующим образом формируются национальные истории до наших дней. Ниже приводится попытка дать исчерпывающую и нейтральную картину.
Первое вращающееся устройство, приводимое в движение электромагнетизмом, было построено англичанином Питером Барлоу в 1822 году (Колесо Барлоу).
После многих других более или менее успешных попыток с относительно слабым вращающимся и возвратно-поступательным устройством немецкоязычный прусский Мориц Якоби в мае 1834 года создал первый настоящий вращающийся электродвигатель , который действительно развил замечательную механическую выходную мощность. Его мотор установил мировой рекорд, который был улучшен только четыре года спустя, в сентябре 1838 года, самим Якоби. Его второй мотор был достаточно мощным, чтобы переправить лодку с 14 людьми через широкую реку.Лишь в 1839/40 году другим разработчикам во всем мире удалось создать двигатели с аналогичными, а затем и более высокими характеристиками.
Уже в 1833 году немец Генрих Фридрих Эмиль Ленц опубликовал статью о законе взаимности магнитоэлектрических и электромагнитных явлений, то есть о обратимости электрогенератора и двигателя . В 1838 году он дал подробное описание своих экспериментов с генератором Pixii, который он использовал в качестве двигателя.
В 1835 году двое голландцев Сибрандус Стратинг и Кристофер Беккер построили электродвигатель, который приводил в движение небольшую модель автомобиля.Это первое известное практическое применение электродвигателя. В феврале 1837 г. первый патент на электродвигатель был выдан американцу Томасу Дэвенпорту.
Однако все ранние разработки Якоби, Стратинга, Давенпорта и других в конечном итоге не привели к электродвигателям, которые мы знаем сегодня.
Двигатель постоянного тока не был создан на основе этих двигателей, а был создан в результате разработки генераторов энергии (динамометров). Основы были заложены Уильямом Ричи и Ипполитом Пикси в 1832 году с изобретением коммутатора и, что наиболее важно, Вернером Сименсом в 1856 году с двойным Т-образным якорем и его главным инженером Фридрихом Хефнер-Альтенеком в 1872 году с барабанная арматура.Двигатели постоянного тока по-прежнему занимают доминирующее положение на рынке в диапазоне малой мощности (ниже 1 кВт) и низкого напряжения (ниже 60 В).
В период с 1885 по 1889 год была изобретена трехфазная электрическая система , которая является основой для современной передачи электроэнергии и современных электродвигателей. Единого изобретателя трехфазной системы питания назвать нельзя. Есть несколько более или менее известных имен, которые принимали активное участие в изобретениях (Брэдли, Доливо-Добровольский, Феррарис, Хазельвандер, Тесла и Венстрём).Сегодня трехфазный синхронный двигатель используется в основном в высокодинамичных приложениях (например, в роботах) и в электромобилях. Впервые он был разработан Фридрихом Августом Хазельвандером в 1887 году.Очень успешный трехфазный асинхронный двигатель был построен Михаилом Доливо-Добровольским в 1889 году. Сегодня это наиболее часто производимая машина в диапазоне мощностей от 1 кВт и выше.
Расписание 1800 — 1834: Первые эксперименты с электромагнитными устройствами| 1800 | Впервые Allessandro Volta (итальянский) производит непрерывную электрическую энергию (в отличие от искры или статического электричества) из набора серебряных и цинковых пластин. |
| 1820 | Ганс Христиан Эрстед (Дениш) обнаруживает генерацию магнитного поля электрическими токами, наблюдая за отклонением стрелки компаса. Это был первый случай, когда механическое движение было вызвано электрическим током. |
| 1820 | Андре-Мари Ампер (французский язык) изобретает цилиндрическую катушку (соленоид). |
| 1821 | Майкл Фарадей (британец) создает два эксперимента для демонстрации электромагнитного вращения. Вертикально подвешенный провод движется по круговой орбите вокруг магнита. | Вращающийся провод Фарадея, 1821 Фотография любезно предоставлена Отделом труда и промышленности, Национальный музей американской истории, Смитсоновский институт |
| 1822 | Питер Барлоу (Великобритания) изобретает прялку (колесо Барлоу = униполярная машина). | Колесо Барлоу, 1822 Philosophical Magazine, 1822, vol. 59 |
| 1825-1826 | William Sturgeon (Великобритания) изобретает электромагнит , катушку проводов с железным сердечником для усиления магнитного поля. | Первый электромагнит Стерджена, 1825 г. Труды Общества поощрения художеств, мануфактур и торговли, 1824 г., т.43, пл. 3 |
| 1827-1828 | Istvan (Ányos) Jedlik (венгерский) изобретает первую роторную машину с электромагнитами и коммутатором. Однако Джедлик публично сообщил о своем изобретении только десятилетия спустя, и фактическая дата изобретения неизвестна. До сих пор многие венгры считают, что Едлик изобрел электродвигатели. Функциональная модель его аппарата выставлена в художественном музее в Будапеште. Хотя на самом деле это может быть первый электродвигатель, следует понимать, что это устройство не оказало влияния на дальнейшее развитие электрических машин. Изобретение Джедлика долгое время оставалось скрытым, и изобретатель не преследовал его. Электротехника ничем не обязана Джедлику. | Поворотное устройство Jedlik, 1827/28 Фото: Wikipedia Электромобиль Jedlik, 1827/28 Фото: Wikipedia |
| перед 1830 | Иоганн Михаэль Эклинг, механик из Вены, конструирует двигатель по планам и идеям проф.Андреас фон Баумгартнер (австрийский физик; с 1823 г. профессор физики и прикладной математики в Вене). Этот аппарат был приобретен в 1830 году Инсбрукским университетом по цене 50 жидких кубометров. Год постройки неизвестен, но должно быть до 1830 года, поскольку дата покупки подтверждена. | Двигатель Баумгартнера, построенный Эклингом до 1830 года Фотография любезно предоставлена Университетом Инсбрука, Музей экспериментальной физики, Ao.Univ. Проф. Маг. Доктор Армин Денот. |
| 1831 | Майкл Фарадей (Великобритания) обнаруживает и исследует электромагнитную индукцию, то есть генерацию электрического тока из-за переменного магнитного поля (инверсия открытия Эрстеда). Фарадей закладывает основу для развития электрогенератора. |
| 1831 | Джозеф Генри (американец) находит, что закон индукции не зависит от Фарадея, и строит небольшой магнитный рокер.Он описывает это как «философскую игрушку». В статье для английского журнала Philosophical Magazine, в 1838 году англичанин Ф. Уоткинс подробно описывает устройство Генри и называет его первым электродвигателем, когда-либо известным. Эта точка зрения распространяется и по сей день в основном на британскую литературу. | Магнитный рокер Генри, 1831 Американский журнал науки, 1831, т. 20, стр. 342 |
| Апрель 1832 | Savatore dal Negro (итальянский) создает устройство, которое может поднять 60 граммов за одну секунду на 5 сантиметров и, следовательно, развивает механическую мощность почти 30 мВт. Вероятно, он был вдохновлен магнитным рокером Генри и создал аналогичную возвратно-поступательную машину. Однако устройство Даль Негро может производить движение с помощью специальной передачи. Даль Негро описывает свои эксперименты в письме от апреля 1832 года, а затем в научной статье « Nuova Macchina élettro-Magnetica » в марте 1834 года. | Электромагнитный маятник Даль Негро, 1832 Annali delle Scienze de Regno Lombardo-Veneto, März 1834, pl. 4 |
| июль 1832 | Первое публичное описание вращающейся электрической машины . Автор — анонимный писатель с инициалами П.М. Теперь его с большой вероятностью опознали как ирландца Фредерика Мак-Клинтока из Дублина. Майкл Фарадей, получатель письма от 26 июля 1832 г., немедленно его публикует. Впервые публично описана вращающаяся электрическая машина. | Первое описание вращающейся электрической машины П.М., 1832 г. Philosophical Magazine, 1832, стр. 161–162 |
| июль 1832 | Hippolyte Pixii (французский язык) создает первый аппарат для генерации переменного тока из вращения. Устройство было публично представлено в сентябре 1832 года на заседании Académie des Sciences . Его описание напечатано уже в июльском выпуске Annales de Chimie . Pixii улучшил свое устройство в том же году, добавив переключающее устройство. Теперь он может производить пульсирующий постоянный ток. | Первый генератор постоянного тока Pixii, 1832/33 F.Niethammer, Ein- und Mehrphasen-Wechsel-strom-Erzeuger, Verlag S. Hirzel, Leipzig 1906 |
| 1832 | William Ritchie (британский) сообщил в марте 1833 года об устройстве, которое, как он утверждал, было построено девятью месяцами ранее летом 1832 года. Это вращающийся электромагнитный генератор с четырьмя катушками ротора, коммутатором и щетками. Ричи считается изобретателем коммутатора. В конце своей статьи Ричи описывает, как он смог вращать электрический магнит, используя магнитное поле Земли. Он мог поднять вес на несколько унций (50-100 грамм). Коммутация производилась двумя концами провода, которые входили в два полукруглых желоба с ртутью. | Первый генератор постоянного тока с коммутатором, 1832/33 Вращающаяся катушка Ричи, 1833 Philosophical Trans.Лондонского королевского общества, 1833, Vol. 132, стр.316, пл.7 |
| Янв 1833 | A Доктор Шультесс читает лекцию в Обществе инженеров в Цюрихе в 1832 году, в которой описывает свои идеи электродвигателя. В январе 1833 года он успешно продемонстрировал машину перед тем же цюрихским обществом. Более подробная информация отсутствует. | |
| Март 1833 | Осенью 1832 года William Sturgeon строит вращающееся электрическое устройство, которое он публично демонстрирует в марте 1833 года в Лондоне. Как и в случае с Джедликом, нет никаких определенных доказательств даты и деталей его строительства. Осетр сообщил об этом изобретении в 1836 году в первом выпуске своего собственного журнала. | Вращающее устройство Осетровых, 1832 Осетровые Летопись Электричества, 1836/37, т. 1 |
| Декабрь 1833 | В первые годы развития электротехники проводилось строгое различие между магнитно-электрическими машинами, т.е.е. электрические генераторы и электромагнитные машины, то есть электродвигатели. Генрих Фридрих Эмиль Ленц (немецкий) обнаружил « закон взаимности магнитоэлектрических и электромагнитных явлений », то есть обратимость электрического генератора и двигателя. Его научный текст читается в конце 1833 года в Санкт-Петербургской Академии наук и опубликован в 1834 году в «Annalen der Physik und Chemie » Поггендорфа.Его идеи постепенно становятся обычным явлением, особенно в 1838 году после нескольких сообщений об успешных экспериментах по обращению. Иногда утверждают, что принцип обращения был открыт в 1861 году итальянцем Пачинотти или даже только в 1873 году случайно на Всемирной выставке в Вене. Оба утверждения ложны. Эмиль Ленц широко сообщил еще в 1838 году в Annalen der Physik und Chemie Поггендорфа , как он использовал генератор Pixii в качестве двигателя. |
| Июль 1834 | Джузеппе Доменико Ботто (итальянец), профессор физики из Турина, в июле 1834 года публикует в женевском журнале Bibliotheque Universelle описание электродвигателя, на котором он работает. Его устройство соответствует метроному (похожему на конструкции Генри и Даль Негро), действующему на маятник с помощью двух электромагнитов.Вращательное движение создается штоком поршня. Реплика устройства сейчас выставлена в Museo Galileo во Флоренции. | Роторная машина Ботто, июль 1834 г. (реконструкция) Фотография любезно предоставлена Museo Galileo, Флоренция |
| Май 1834 | Moritz Hermann Jacobi (немецкоязычный прусский, натурализованный русский) начинается с экспериментов с подковообразным электромагнитом в начале 1833 года в Кенигсберге (тогда Пруссия, ныне Россия).В январе 1834 года он пишет в письме Поггендорфу, редактору журнала Annalen der Physik und Chemie , о своих успехах. Он переходит к созданию электродвигателя, которое он завершает в мае 1834 года. Его двигатель поднимает вес от 10 до 12 фунтов со скоростью один фут в секунду, что эквивалентно примерно 15 ваттам механической мощности. Якоби прямо заявил в меморандуме 1835 года, что он не единственный изобретатель электромагнитного двигателя. Он указывает на приоритет изобретений Ботто и Даль Негро. Однако Якоби, несомненно, был первым, кто создал пригодный для использования вращающийся электродвигатель. Полнофункциональная копия его двигателя выставлена в Институте электротехники (ETI) Технологического института Карлсруэ (KIT) по адресу Engelbert-Arnold-Strasse 5 (Building 11.10) в Карлсруэ, Германия. | Первый настоящий электродвигатель Мориц Якоби, Кенигсберг, май 1834 года |
| Октябрь 1834 | Американско-американская T. Edmundson создает электромагнитное вращающееся устройство, напоминающее водяное колесо. | Электромагнитное колесо Эдмундсона Американский журнал науки, 1834, т. 26, стр. 205 |
| 1834-1835 | В декабре 1833 года кузнец Томас Давенпорт (американец) покупает соленоид непосредственно у Джозефа Генри и начинает эксперименты вместе с Orange Smalley (американец) в мастерской в Форестдейле, штат Вермонт. В июле 1834 года двое мужчин создают свою первую роторную машину. Они улучшают устройство в несколько этапов, прежде чем впервые публично продемонстрировать его в декабре 1834 года. В следующем году Давенпорт отделяется от Смолли. Летом 1835 года Давенпорт едет в Вашингтон, округ Колумбия, чтобы продемонстрировать свою машину в патентном бюро и зарегистрировать ее. Однако из-за отсутствия денег ему пришлось безуспешно вернуться домой. | Первый двигатель Давенпорта из его первой заявки на патент в июне 1835 года |
| Август 1835 | Фрэнсис Уоткинс (британский) создает электрическую «игрушку», с помощью которой он может приводить во вращение несколько магнитных игл. Он описывает устройство в статье для Philosophical Magazine . Он признается, что его вдохновила электромагнитная машина (генератор) Джозефа Сакстона, которая выставлена в публичной галерее в Лондоне с августа 1833 года. Watkins можно считать одним из первых, кто понял принцип реверсирования двигателя и генератора. | Игрушка Уоткина, 1835 Philosophical Magazine , 1835, vol. 7, стр. 112 |
| 1835 | Sibrandus Stratingh и Christopher Becker (голландский) создают небольшой (30 x 25 см) трехколесный автомобиль с электрическим приводом и весом около 3 кг.Он может проехать по столу от 15 до 20 минут, пока батарея не разрядится. Stratingh и Becker публикуют отчет о своем успехе в том же году. Стратинг знал работы Якоби и в 1840 году хотел построить настоящий электромобиль, но ему это так и не удалось. | Электромодель Стрейтинга и Беккера, 1835 год |
| Май 1836 | Johann Philipp Wagner (немецкий) представляет электродвигатель на Stiftungsfest из Sencken-bergischen naturforschenden Gesellschaft .Его аппарат похож на устройство, созданное Стратингом и Беккером. Он может работать около 10 минут, пока батарея не разрядится. Вагнер хранит свою конструкцию в секрете, поэтому есть отчеты о демонстрации, но нет чертежей машины. В последующие годы Вагнер продолжает развивать свой двигатель и публично демонстрирует улучшенные версии. |
| 1836 1837 | Давенпорт продолжает совершенствовать свои устройства.В 1836 году он находит нового партнера в лице Ransom Cook и переезжает в Саратога-Спрингс, штат Нью-Йорк, для дальнейшего развития своих двигателей. С помощью Кука он строит модель патентного бюро. 24 января 1837 года Давенпорт подает в Вашингтон свое предостережение, а 5 февраля 1837 года он получает первый в США патент на электродвигатель: « Улучшение силового механизма с помощью магнетизма и электромагнетизма ». Его модель двигателя сейчас выставлена в Смитсоновском институте в Вашингтоне, округ Колумбия. В запатентованной конструкцииDavenport используются четыре вращающихся электромагнита, которые переключаются с помощью коммутатора, и фиксированные постоянные магниты в форме кольца, сделанные из мягкого железа. Усовершенствованный двигатель, который он представляет в августе 1837 года, имеет диаметр 6 дюймов, вращается со скоростью около 1000 оборотов в минуту и может поднять 200-фунтовый груз на один фут за одну минуту. Это соответствует мощности 4,5 Вт. Давенпорт в последующие годы постоянно совершенствовал свои конструкции. Вместе с Эдвином Вильямсом из Нью-Йорка и его партнером Рэнсомом Куком , Давенпорт 3 марта 1837 года формирует объединенную акционерную ассоциацию. Однако Уильямс не может продать достаточно акций, и все предприятие рушится всего через год . | Запатентованный двигатель Давенпорта, февраль 1837 г. |
Томас Дэвенпорт — Изобретатель электродвигателя?
Есть несколько текстов пафоса в американо-американской литературе, в которых Томас Дэвенпорт прославляется как изобретатель электродвигателя.Это утверждение основано на бесспорном факте, что Давенпорт был первым американцем, который создал пригодный для использования электродвигатель, а также первым, кто получил патент на такое устройство в начале 1837 года.
ОднакоDavenport был далеко не первым, кто построил электродвигатель. В Европе (особенно в Англии, Италии и Пруссии) технологии были уже значительно продвинуты. Уже летом 1834 года, за три года до патента, Мориц Якоби представил двигатель, который был в три раза мощнее усовершенствованной машины, которую Давенпорт разработал через несколько месяцев после подачи заявки на патент.Вдобавок мотор Давенпорта работал быстрее, чем у Якоби. Таким образом, выходной крутящий момент двигателя Давенпорта, решающий фактор при сравнении электрических машин, составлял лишь около одной десятой от конструкции Якоби, разработанной тремя годами ранее.
В 1835 году, вскоре после появления двигателя Якоби, двое голландцев Стрейтинг и Беккер уже представили первое практическое применение, управляя небольшой электромобилем.
За годы, прошедшие после патента Давенпорта, продвижение Якоби практически не уменьшилось.В то же время, когда Якоби продемонстрировал свою следующую машину осенью 1838 года, двигатель, который имел выходную мощность 300 Вт и мог вести лодку с 14 людьми через широкую реку, Давенпорт показал крошечную модель поезда.
МоторДавенпорта не примечателен в историческом контексте. Его конструкция не является существенным улучшением других современных конструкций.
За прошедшие годы компания Davenport произвела большое количество машин.Но в отличие от Вернера Сименса, Джорджа Вестингауза и Томаса Эдисона он не был основателем важной компании. И в отличие от Николы Теслы, например, Томас Давенпорт никогда не мог продать или лицензировать свой патент.
Давенпорт не получил патент на электродвигатель как таковой, а только на его особые конструктивные особенности. В период с 1837 по 1866 год только в Англии другим изобретателям было выдано около 100 патентов на электродвигатели. После того, как Давенпорт модернизировал свой двигатель уже в 1837 году, его патент стал практически бесполезным.
Davenport — это честь быть первым из тысяч инженеров, получивших патент на электродвигатель. Но он не является их изобретателем, и его разработки не оказали сколько-нибудь значительного влияния на дальнейшее развитие электродвигателей.
Расписание 1838 — 1854 гг .: более мощные двигатели, новые применения
| февр. 1838 | Уоткинс публикует обширную статью в Philosophical Magazine , где он представляет свой двигатель. | Двигатель Уоткина, февраль 1838 г. Philosophical Magazine, 1838 г., т. 12, пл. 4 |
| Август 1838 г. | В августе 1838 года в Лондоне выставлена крошечная модель поезда с одним из двигателей Davenport . Он движется со скоростью 3 мили в час. | Модель поезда Давенпорта, 1838 Фото любезно предоставлено Отделом труда и промышленности Национального музея американской истории Смитсоновского института. |
| сен. 1838 | Якоби переезжает в Санкт-Петербург в августе 1838 года по просьбе русского царя. Он был принят в Петербургскую Академию наук и щедро поддержан царем в его дальнейшей работе над электродвигателями. 13 сентября 1838 года Якоби впервые демонстрирует на Неве лодку с электрическим приводом и гребными колесами длиной около 8 м. Цинковые батареи имеют 320 пар пластин и весят 200 кг.Они размещены вдоль двух боковых стенок сосуда. Мотор развивает мощность от 1/5 до 1/4 л.с. (300 Вт), лодка движется со скоростью 2,5 км / ч по маршруту длиной 7,5 км. Он может перевозить более десятка пассажиров. Якоби целыми днями разъезжает по Неве. В современных газетных статьях говорится, что после двух-трех месяцев работы потребление цинка составило 24 фунта. | Улучшенный мотор Якоби, 1838 |
| 1838 | Чарльз Г. Page (американец) начинает всю жизнь заниматься электромоторами. В течение следующих 20 лет Пейдж будет искать лучшие и более мощные машины. Его двигатели продавались по каталогам в США и достигли высокого уровня осведомленности общественности. Раньше многие изобретатели электродвигателей имитировали паровые двигатели с качающимся (возвратно-поступательным) поршнем. Пейдж тоже строит такую машину (см. Справа), но затем обращается к вращающимся устройствам. | Первый двигатель Пейджа, 1838 Американский журнал науки , 1838, т. 35, стр. 264 |
| Август 1839 | 8 августа г. Якоби испытывает усовершенствованный электродвигатель, механические характеристики которого в три-четыре раза превосходят его вторую машину 1838 года (около 1 кВт).Его лодка сейчас развивает скорость 4 км / ч. По словам Уильяма Роберта Гроува, ключевым фактором его успеха является улучшенная цинк-платиновая батарея, которую он сделал сам. В октябре 1841 года Якоби снова демонстрирует усовершенствованный двигатель, который, однако, лишь немного превосходит модель 1839 года. Это последний электродвигатель, построенный Якоби. Теперь он обращается к теории электродвигателей, а затем переходит к другим электрическим явлениям. |
| 1837- 1842 | Роберт Дэвидсон (Шотландия) также занимается разработкой электродвигателей с 1837 года.Сделал несколько приводов для токарного станка и модельных машин. В 1839 году Дэвидсон руководит постройкой первого автомобиля с электрическим приводом. В сентябре 1842 года он совершает пробные пробеги с 5-тонным локомотивом длиной 4,8 м на железнодорожной линии Эдинбург — Глазго. Его двигатель развивает около 1 л.с. (0,74 кВт) и развивает скорость 4 мили в час (6,4 км / ч). | Первый электровоз Дэвидсона, 1839 год От Т.du Moncel, Электричество как движущая сила , Лондон, 1883 г., рис. 32 |
В последующие годы начинается поток патентов на электромагнитные машины — около 100 только в Англии в период с 1837 по 1866 год.
Среди изобретателей, имеющих дело с электродвигателями: Джеймс Джоул (англ., 1838 г.), Уильям Тейлор (англ., 1838 г.), Урайа Кларк (1840 г.), Томас Райт (1840 г.), Уитстон (англ., 1841 г.) , де Гарлем (ab 1841), П.Элиас (американец, ab 1842), Дж. Фромент (французский, ab 1844), Моисей Г. Фармер (американец, ab 1846), GQ Colton (американец, ab 1847), Hjorth (ab 1849), Томас Холл (американец в США, около 1850 г.), Т.К. Эйвери (около 1851 г.), Серен Хьорт (датчанин, около 1851 г.), Дю Монсель (француз, около 1851 г.), Мари Дэви (франц. 1861)
и другие.
Изначально идет соревнование между колебательными (возвратно-поступательными) и вращательными машинами. Позже колебательные машины полностью исчезают из поля зрения.
Основная проблема первых электродвигателей заключалась в том, что электрический ток от гальванических элементов (цинковых батарей) был слишком дорогим, чтобы конкурировать с паровыми двигателями. Р. Хант сообщил в 1850 году в журнале British Philosophical Magazine , что электроэнергия даже в самых лучших условиях в 25 раз дороже, чем паровая машина. Только с продолжающейся разработкой электрогенератора (динамо-машины) ситуация начинает меняться.
| 1840 | 18 января 1840 года выходит первое издание новой газеты Давенпорта, Electro Magnet and Mechanics Intelligencer . Печатный станок приводится в движение двумя собственными моторами. Моторы выдают якобы около 2 л.с., что составляет около 1,5 кВт. |
| 1841- 1844 | По инициативе Вагнера, Германская Конфедерация под руководством Пруссии, Баварии и Австрии устанавливает в 1841 году приз в размере 100000 гульденов за создание электрической машины, мощность которой дешевле, чем мощность лошади, пара или человека. мощность. Конечно, эта цена привлекает других изобретателей, которые параллельно с Вагнером начинают работать над электродвигателем. Среди них господин Карл Людвиг Althans из Бюкебурга недалеко от Миндена, Emil Stöhrer из Лейпцига, Emil Groos из Карлсруэ и Peter Bauer из Нюрнберга. В частности, в 1843 году Штёрер конструирует замечательную машину. При исследовании последней машины Вагнера в мае и июне 1844 г. во Франкфурте-на-Майне федеральная комиссия определила мощность всего в 50 Вт.Потребление цинка настолько велико, что лошадь, пар и рабочая сила значительно дешевле. Из-за этой неудачи Вагнеру отказывают в цене, и он впадает в немилость. Без мощного электрогенератора это соревнование невозможно было бы выиграть, и человечеству пришлось ждать еще 25 лет. |
| 1851 | Page увеличивает мощность двигателей с 8 до 20 л.с. С двумя двигателями он ведет 10-тонный локомотив с максимальной скоростью 30 км / ч. Он путешествует по маршруту из Вашингтона в Бладенбург за 19 минут. |
| 1854 | Другой, 12-тонный локомотив Пейджа едет по маршруту Балтимор — Огайо. |
Революция в управлении моторными приводами | designnews.com
За последнее десятилетие моторные приводы с электронным управлением стали жизненно важными для автоматизированного оборудования от тяги и движения до сервосистем, робототехники и автоматизированных станков. Развитие цифровой и силовой электроники обеспечило высокую степень контроля по доступным ценам.
Благодаря низкой инерции и широкой доступности асинхронный двигатель переменного тока является рабочей лошадкой в индустрии промышленных приводов. Но даже при простом управлении возможно дальнейшее улучшение характеристик и эффективности асинхронного двигателя с использованием сложных алгоритмов цифрового управления для обработки изменений таких параметров, как крутящий момент и нагрузка.
Динамические требования современных систем управления движением предъявляют значительные вычислительные требования к центральному процессору, который является сердцем приводов двигателей с электронным управлением. Хотя многие 16- и 32-разрядные микроконтроллеры (MCU) и 16-разрядные процессоры цифровых сигналов (DSP) успешно используются в приложениях управления движением, они имеют определенные ограничения.
К этим препятствиям относятся: неспособность обеспечить широкий динамический рабочий диапазон по различным параметрам двигателя; работа с переменными типами данных; обеспечение быстрого поиска в таблице и функций интерполяции; и одновременно обслуживая быструю многоуровневую структуру прерываний. Однако объединение функций контроллера и процессора в одно ядро обработки, такое как архитектура Siemens TriCore TM , позволяет преодолеть эти ограничения для более эффективного и экономичного управления.
Недостатки управления движением. Во многих приложениях управления движением асинхронных двигателей переменного тока обычно используется комбинация микросхем MCU и DSP или гибридная микросхема с обоими ядрами для выполнения требований к системе инициализации, коммутации и обратной связи. Например, MCU обычно использует первичные входные данные скорости двигателя и положения ротора для обращения к справочной таблице синусоидальных сигналов.Пройдя по этой таблице, MCU определяет время коммутации для сигналов широтно-импульсной модуляции (ШИМ), а затем синусоидально модулирует их для управления фазными обмотками двигателя. Затем MCU адаптирует желаемые формы волны тока, чтобы уменьшить пульсации крутящего момента, возникающие из-за гармоник в противо-ЭДС обмотки двигателя. DSP выполняет автокорреляцию, фильтрацию сигналов и другие ресурсоемкие функции, такие как алгоритмы пропорционально-интегрального дифференциала (ПИД) с обратной связью.
Хотя современные встраиваемые решения удовлетворяют системные требования DSP привода, они не единственные требования к высокопроизводительной системе привода. Быстрое и эффективное переключение между задачами DSP и задачами управления — это одна из областей производительности, в которой гибридные архитектуры MCU-Plus-DSP испытывают узкие места в памяти, медленное время переключения задач и низкую задержку прерывания.Новейшие микроконтроллеры MCU / DSP с объединенной архитектурой устраняют эти недостатки и предоставляют контроллер, оптимизированный для задач встроенного DSP, а также точно настроенный на потребности переключения встроенных задач в реальном времени.
Удовлетворяет требованиям векторного контроля. Например, в некоторых приложениях управление вектором поля, когда асинхронный двигатель работает как серводвигатель, заменяет традиционный метод ШИМ для управления различными фазами асинхронных двигателей переменного тока.Векторное управление переменным током требует сочетания быстрого переключения задач с обработкой DSP критических по времени контуров. Эта операция не может контролироваться только процессом ШИМ, поэтому появились инверторы с векторным управлением. Инвертор с пространственно-векторным управлением создает напряжение, ток и частоту, необходимые для ориентации поля внутри асинхронного двигателя переменного тока.
Умная объединенная архитектура хорошо подходит для этого приложения. Чтобы выполнить процесс ориентации поля, привод вектора магнитного потока должен знать пространственное угловое положение магнитного потока ротора внутри двигателя. Функции, необходимые для систем управления индукционным приводом, включают:
Передаточные функции ПИД-регулятора
Функции DSP обычно используют арифметику конечной точности и позволяют аппаратному модулю умножения-накопления (MAC) обрабатывать такие коэффициенты контроллера и рабочие параметры системы, как скорость, положение и ускорение.MAC реализует все традиционные функции DSP, такие как фильтрация сигналов, выравнивание и модуляция. Чтобы обеспечить общую стабильность и надежность двигателя, команды MAC должны выполняться в кратчайшие сроки выполнения, предпочтительно в пределах одного цикла команд контроллера.
Кроме того, более сложные алгоритмы управления обеспечивают улучшенную динамику и точность системы, что требует большей вычислительной мощности и разрешения.Общей характеристикой всех используемых алгоритмов является базовая структура, основанная на быстром внутреннем контуре управления током (крутящим моментом) и внешних контурах управления скоростью и положением.
Завтрашний диктат. В связи с стремлением технологии приводов с асинхронными двигателями переменного тока к увеличению производительности обработки, снижению стоимости и повышению надежности системы будущие системы привода с программируемыми двигателями потребуют более мощных 32-разрядных производных от MCU / DSP.Это сократит объем кода, необходимого для выполнения задачи, и обеспечит более гибкую систему в реальном времени, чем традиционные контуры управления. Для повышения гибкости системы также потребуются будущие предложения MCU / DSP для обеспечения энергонезависимой встроенной флэш-памяти, которую можно дистанционно программировать для соответствия широкому спектру различных системных требований привода.
Однокристальные решения являются абсолютным императивом для всех будущих встраиваемых систем управления движением, чтобы снизить стоимость компонентов, энергопотребление, время разработки и размер системы.
Что для вас может означать объединенная однокристальная архитектура управления / обработки:
Снижение затрат на комплектующие
Меньше энергопотребления
Меньший размер системы
Ускорение проектирования
Более точный контроль
Выходная мощность двигателя электромобиля
Что означает выходная мощность двигателя автомобиля?В физике выходная мощность относится к количеству энергии, доставленной в течение заданного периода времени.Применительно к автомобильной промышленности это означает количество механической энергии, производимой двигателем, опять же в течение заданного периода времени. Это влияет на ускорение, тяговое усилие автомобиля (вес, который он может перемещать) и его способность подниматься в гору.
Будь то двигатель внутреннего сгорания или электродвигатель, выходная мощность механической энергии определяется произведением скорости вращения (измеряется в оборотах в минуту) и крутящего момента. Выраженный в Ньютон-метрах (Нм), крутящий момент описывает тяговую мощность двигателя.
Это объясняет тот факт, что два двигателя с одинаковой выходной мощностью могут вести себя по-разному и чувствовать себя водителем по-разному. Спортивный автомобиль демонстрирует характеристики, которые не могут сравниться с характеристиками большого грузовика, даже если они оба одинаково мощны с точки зрения мощности двигателя!
Как рассчитывается выходная мощность двигателя электромобиля ?Производители не могут просто заявить мощность двигателя: она измеряется в процессе тестирования, что иллюстрируется изменениями крутящего момента в зависимости от скорости вращения.Значение, используемое производителями автомобилей, обычно относится к максимальной измеренной выходной мощности. Выражается в ваттах (Вт) и, в более общем смысле, в киловаттах (кВт).
Как найти выходную мощность двигателя электромобиляКогда говорят об электрической системе, такой как в электромобиле, механическая мощность, выраженная в ваттах (Вт), киловаттах (кВт) или лошадиных силах (PS), вычисляется путем умножения скорости (об / мин) на крутящий момент, вращательное эквивалент линейной силы, измеряемой в фунт-футах (фунт-фут) или ньютон-метрах (Нм).Но прежде чем приступить к каким-либо долгим вычислениям, быстрый поиск в Интернете приведет к появлению ряда веб-сайтов, на которых вы просто вводите скорость и крутящий момент вашего электромобиля, чтобы рассчитать его выходную мощность в киловаттах. Или вы можете посмотреть руководство по эксплуатации вашего автомобиля.
Как киловатты (кВт) соотносятся с мощностью (л.с.)?«Лошадиная сила» исторически относится к выходной мощности автомобильного двигателя и восходит к концу девятнадцатого века. Это способ выразить выходную мощность более буквально, приравняв ее к рабочей нагрузке, которую люди могут понять.Таким образом, мощность в лошадиных силах, иногда обозначаемая аббревиатурой PS (немецкое «Pferdestärke»), означает мощность, создаваемую лошадью, чтобы поднять 75-килограммовый груз на один метр на высоту за одну секунду. По метрической системе это примерно 736 Вт.
.Таким образом, мощность двигателя электромобиля может быть взаимозаменяемо выражена в кВт или л.с. Например, двигатель R135 в ZOE выдает мощность двигателя 100 кВт или 135 л.с. — отсюда и название! Его крутящий момент теперь улучшен до 245 Нм по сравнению с 225 Нм у двигателя ZOE R110, выпущенного в 2018 году, чтобы сделать электромобиль более динамичным в ситуациях, когда требуется ускорение, например, при проезде или выезде на шоссе.
Какие факторы определяют выходную мощность электромобиля?Роль двигателя — создавать механическую энергию из другой формы энергии. Таким образом, его выходная мощность определяется максимальной способностью преобразования энергии. В случае электромобиля его выходная мощность зависит от размера двигателя (его объема) и мощности входящего тока.
Что такое «полезная» энергия, выделяемая электродвигателем?Выходная мощность также является результатом урожайности, т.е.е. соотношение количества поступающей поставляемой электроэнергии к исходящей доставленной механической энергии.
Не вся энергия, вырабатываемая электросетью или зарядной станцией, в конечном итоге используется для питания двигателя. Его можно потерять из-за тепла или трения по пути. Другими словами, механическая энергия, фактически используемая двигателем, является «полезной» энергией. Разделив фактическую выходную мощность электродвигателя на идеальную выходную мощность (равную начальной потребляемой мощности), вы получите механический КПД двигателя.
Итак, для электромобиля расчет «полезной» энергии можно найти, разделив выходную мощность (скорость x крутящий момент) на входную и выразив результат в процентах. Это иначе известно как формула эффективности r = P / C, где P — количество полезной продукции («продукта»), произведенной на количество C («стоимость») потребленных ресурсов.
Цель состоит в том, чтобы уменьшить эти потери выходной мощности для достижения максимальной энергоэффективности. Таким образом, большая часть энергии, хранящейся в аккумуляторе, используется для увеличения запаса хода электромобиля.В этом отношении ZOE работает особенно хорошо. Имея запас хода по WLTP * в 395 км благодаря аккумулятору емкостью 52 кВтч, он предлагает одно из лучших соотношений на рынке электромобилей во всех сегментах вместе взятых.
Мощность, потребление и диапазонПри этом максимальная выходная мощность не влияет напрямую на запас хода электромобиля, так как стиль вождения оказывает наибольшее влияние на потребление энергии двигателем. Следовательно, речь идет не о самом эффективном двигателе электромобиля, а о самом эффективном поведении при вождении.Например, резкое ускорение будет означать скачок потребления электроэнергии.