Двухполосное движение: Полосы движения: по каким ехать, поворачивать и разворачиваться
Новая схема движения 2+1 для обгона
Открыть содержаниеПосле тестирования со спорным успехом уменьшенных дорожных знаков, запуска эксперимента по объединению пешеходных переходов с лежачими полицейскими власти Москвы взялись за новую инициативу. Суть её заключается в том, что двухполосные дороги хотят сделать трёхполосными для повышения пропускной способности. Новую схему уже назвали «2+1«.
Суть эксперимента 2+1
При достаточной ширине проезжей части на двухполосных дорогах власти столицы хотят с помощью разметки сделать третью полосу – центральную. Она будет использоваться для обгона тихоходных или просто медленно движущихся транспортных средств. Причём, возможность для обгона будут иметь оба направления движения по крайним полосам.
Логика названия такой схемы расположения транспортных средств проста: 2 крайние полосы используются для движения соответственно в 2 направлениях, а центральная полоса – для возможности обгона с любой стороны.
- средняя полоса схемы 2+1 должна быть свободна на достаточном расстоянии для безопасного обгона,
- едущие сзади или впереди автомобили не начали обгонять.
Где будет применяться?
Конкретных участков дорог власти, разумеется, не называют. Единственное установленное требование к организации схемы 2+1 – ширина проезжей части 13 метров… И это на двухполосной дороге. То есть здесь нужно понимать, что это практически нигде в Москве. Таких участков, где проезжая часть шире указанного числа по пальцам сосчитать!
Несмотря на то, что по ГОСТу ширина каждой полосы должна быть не менее 3,5 метров, что в сумме получается всего 7 метров (а по требованиям для схемы 2+1 нужно в два раза больше), всё же существует ряд дорог с достаточной шириной проезжей части. Речь идёт, конечно же, об обочинах с достаточным количеством насыпи на трассах.
Изменят ли для этого ПДД?
Нет. Этого не нужно по той простой причине, что действующие на 12 Декабря 2020 года Правилам уже предусматривают вариацию движения по трёхполосным дорогам, где средняя может использоваться для обоих направлений. Речь идёт о пункте 9.3 ПДД:
Речь идёт о пункте 9.3 ПДД:
9.3. На дорогах с двусторонним движением, имеющих 3 полосы, обозначенные разметкой (за исключением разметки 1.9 (реверсивное движение)), из которых средняя используется для движения в обоих направлениях, разрешается выезжать на эту полосу только для обгона, объезда, поворота налево или разворота. Выезжать на крайнюю левую полосу, предназначенную для встречного движения, запрещается.
Таким образом, то, можно ли обгонять по центральной полосе при схеме движения 2+1 или нельзя, зависит от нижеследующих случаев применения разметки.
Когда обгонять можно?
Прерывистая одинарная разметка разрешает обгон с обоих направлений
Разметка 1.11 разрешает обгон с обоих направлений
Прерывистая разметка с длинным штрихом разрешает обгон с обоих направлений, но предупреждает о том, что скоро будет сплошная
Такое применение разметки запрещает обгон красному автомобилю и разрешает водителю жёлтого
Когда обгон запрещён?
Сплошная разметка запрещает обгонять с любого направления
Разметка 1.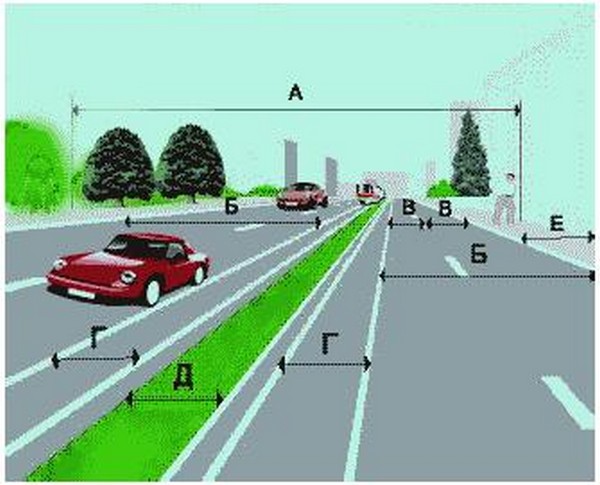 9 обозначает реверсивное движение и запрещает выезд на среднюю полосу в случае, прямо указанном в пункте 9.3 ПДД
9 обозначает реверсивное движение и запрещает выезд на среднюю полосу в случае, прямо указанном в пункте 9.3 ПДД
Нормы ширины проезжей части дороги
Если установлены знаки или нанесена разметка, то вопросы о количестве полос отпадают. Отсутствие знаков и разметки может стать поводом для незаслуженного наказания за выезд на полосу встречного движения. Обратимся к ГОСТ Р 52398-2005 «Классификация автомобильных дорог. Основные параметры и требования». Четырехполосная дорога допускает ширину полос не менее 3,5 м. Таким образом, общая ширина проезжей части на четырехполосной дороге — не менее 14 м. Согласно СНиП 2.05.02-85 «Автомобильные дороги», ширина полос определяется категорией дороги и может быть 3,75, 3,5 и 3 м. Минимальная ширина проезжей части при четырехполосном движении — 15 м, то есть ширина полос на такой дороге 3,75 м.
В пункте 11.5 СП 42.13330.2011 «Градостроительство» для двух- и трехполосных дорог минимальная ширина полос 3 м, а для четырехполосного движения минимальная ширина полосы 3,5 м, соответственно, ширина проезжей части — не менее 14 м.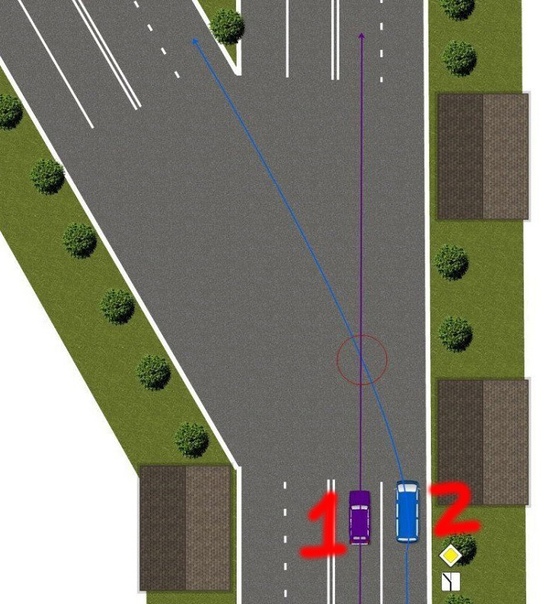 Минимальная ширина полосы 2,75 м установлена для проездов, которые в контексте пункта 11.4 СП 42.13330.2011 являются частью прилегающей территории. Например, от дороги до двора прокладывают проезд 50-60 м.
Минимальная ширина полосы 2,75 м установлена для проездов, которые в контексте пункта 11.4 СП 42.13330.2011 являются частью прилегающей территории. Например, от дороги до двора прокладывают проезд 50-60 м.
Ширина проезжей части 14 м — много это или мало? Ширина «Приоры» по зеркалам — 1890 мм, то есть четыре автомобиля займут примерно 7,5 м. Пусть между ними промежуток 0,5 м. Итого, для разъезда вплотную нужно примерно 9 м. Вот этим и пользуются нерадивые инспекторы: четыре машины разъедутся? Разъедутся! Значит, на дороге четыре полосы. Вы пересекли середину при обгоне? Пересекли! Значит, лишение права управления по части 4 статьи 12.15 КоАП.
Еще один пример. С обеих сторон проезжей части плотно стоят автомобили. Посередине имеется узкий промежуток, где встречные автомобили могут разъехаться. За обгон на такой дороге инспекторы тоже пытаются привлечь водителей к ответственности по части 4 статьи 12.15 КоАП. Не стесняйтесь, измеряйте ширину проезжей части (Постановление ВС РФ от 24.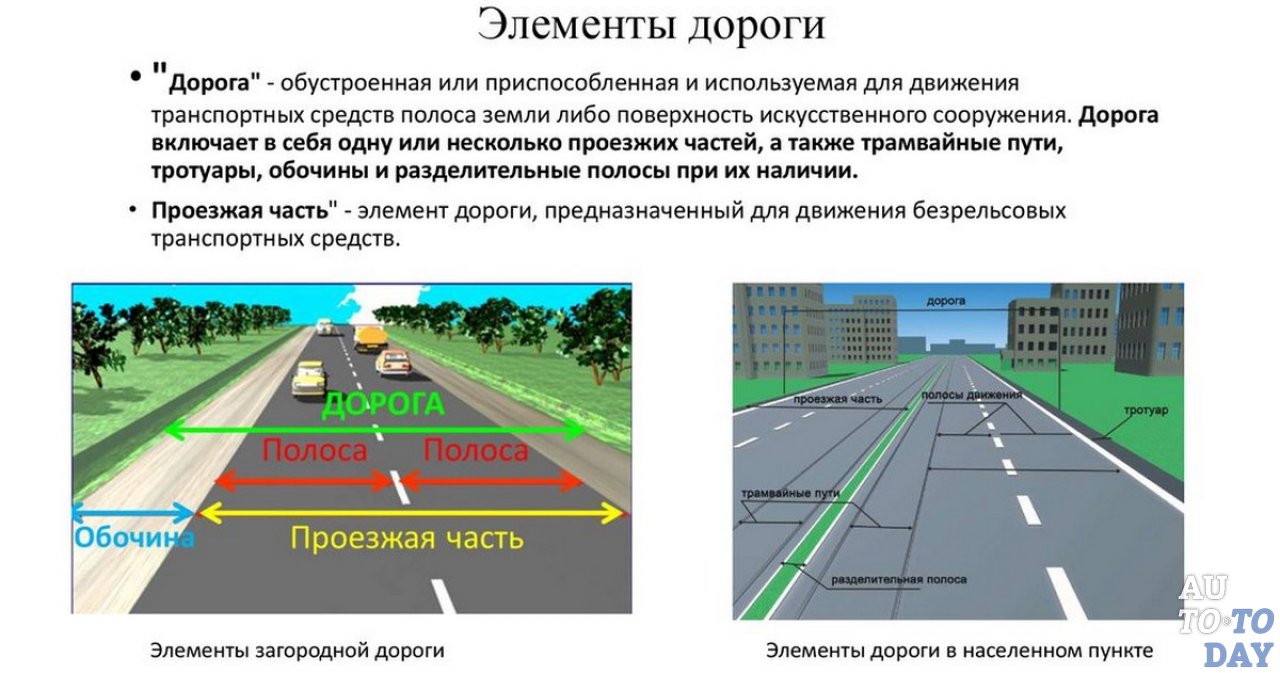
В пункте 9.1 ПДД и пункте 12.2 ПДД упоминаются «уширения проезжей части». В пункте 9.1 дана частичная расшифровка: речь идет о переходно-скоростных полосах, дополнительных полосах на подъем или заездном кармане на остановках автобусов. В ширину проезжей части они включаются, так как предназначены для движения. Местные уширения проезжей части из пункта 12.2 ПДД для движения не предназначены и в ширину проезжей части не включаются. Если вы подъезжаете по двухполосной дороге к перекрестку, где с вашей стороны появляется полоса торможения, а для встречного движения — полоса разгона, то на дороге уже не две, а четыре полосы. И в таком месте наносится двойная сплошная линия разметки 1.
Открываем пункт 12.4 ПДД и читаем, что остановка в местах, где расстояние между автомобилем и сплошной линией разметки менее 3 м, запрещена. Если к ширине ВАЗ-2110 прибавить 3 м, то получаем 4875 мм, то есть почти 5 м. Иначе говоря, Правила подразумевают, что ширина полосы может составлять порядка 5 м и более! В ГОСТ Р 52289-2004 есть оговорка: «На дорогах, элементы поперечного профиля которых не соответствуют требованиям действующих строительных норм и правил, ширина размечаемой полосы движения должна быть не менее 3 м. Допускается уменьшать ширину полосы, предназначенной для движения легковых автомобилей, до 2,75 м, при условии введения необходимых ограничений режима движения». Например, ширина четырехполосной дороги между опорами путепровода может быть уменьшена до 12 м, а для легковых автомобилей — до 11 м. Для обычной дороги такие требования не предъявляются.
Эти нормы можете использовать при обгоне под знаком «Обгон запрещен» на дорогах шириной менее 15 м за городом.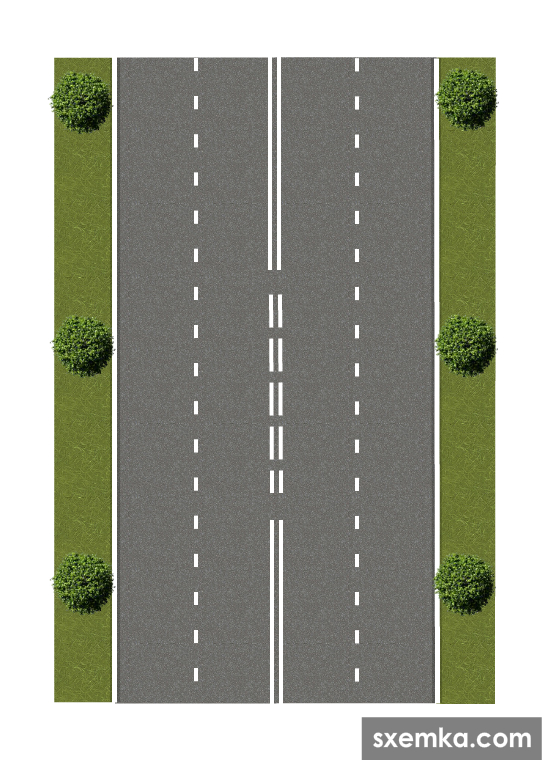 Чтобы не лишиться прав, вам надо доказать, что выезда на встречную полосу не было, следовательно, не было и обгона. Например, дорога шириной 12 м в обычных условиях четырехполосной быть не может. Однако опережение на такой дороге без выезда на встречную полосу проблем не составляет.
Чтобы не лишиться прав, вам надо доказать, что выезда на встречную полосу не было, следовательно, не было и обгона. Например, дорога шириной 12 м в обычных условиях четырехполосной быть не может. Однако опережение на такой дороге без выезда на встречную полосу проблем не составляет.
В России подготовили проект нового ГОСТа о безопасности пешеходов
РосдорНИИ по заказу Минтранса подготовил проект нового стандарта с требованиями к безопасности движения пешеходов. Этот документ был подготовлен в рамках нацпроекта «Безопасные и качественные дороги», целевые показатели которого предусматривают, что к 2024 году смертность в ДТП должна снизиться в 3,5 раза по сравнению с 2017 годом. Обзор проекта ГОСТа, который должен вступить в силу в следующем году, приводит газета «Коммерсант».
Среди прочего в проекте ГОСТа указано, что на четырехполосных дорогах возможно устраивать нерегулируемые переходы, если интенсивность трафика не превышает 12 тыс. машин в сутки, а разрешенная скорость составляет менее 60 километров в час. При этом на переходах должно быть дополнительное освещение и приподнятая разделительная полоса. Ранее общественники выступали против включения в ГОСТ возможности организации нерегулируемых переходов на четырехполосных дорогах.
машин в сутки, а разрешенная скорость составляет менее 60 километров в час. При этом на переходах должно быть дополнительное освещение и приподнятая разделительная полоса. Ранее общественники выступали против включения в ГОСТ возможности организации нерегулируемых переходов на четырехполосных дорогах.
Что же касается нерегулируемых переходов на двух- и трехполосных дорогах, то их допустимо обустраивать на дорогах с ежесуточным трафиком более 15 тыс. машин. В зонах с нерегулируемыми переходами стандарт рекомендует вводить ограничение скорости в 20 километров в час в жилых зонах, 30 километров в час на двухполосных дорогах и 40 километров в час на четырехполосных дорогах в жилых районах и на магистральных улицах. Также документ предписывает ставить камеры возле переходов при повышенном риске ДТП.
Помимо этого, в проекте описываются условия применения так называемого «конфликтного регулирования», под которым понимается настройка светофора, позволяющая машинам поворачивать на перекрестке направо, а пешеходам переходить дорогу в одном цикле. Такую настройку проект ГОСТа рекомендует применять на дорогах III и IV категорий «с выраженной неравномерностью и низкой интенсивностью пешеходного потока». При этом авторы уточняют, что зеленый сигнал светофора для пешеходов в таком режиме должен включаться на 5-10 секунд раньше зеленого сигнала для машин.
Такую настройку проект ГОСТа рекомендует применять на дорогах III и IV категорий «с выраженной неравномерностью и низкой интенсивностью пешеходного потока». При этом авторы уточняют, что зеленый сигнал светофора для пешеходов в таком режиме должен включаться на 5-10 секунд раньше зеленого сигнала для машин.
В числе нововведений, предложенных авторами ГОСТа, следует упомянуть Z-образные переходы через проезжую часть (через островок безопасности и ограждения), аналогичные тем, что уже применяются на железных дорогах, а также меры по «успокоению движения» автомобилей, перечень которых включает принудительное сужение проезжей части зигзагообразной разметкой по краям, организацию парковочных мест и уменьшение ширины полос. Успокаивать движение также предлагается при помощи принудительного изменения траектории движения машин на «зигзагообразную» с помощью направляющих островков, которые в документе обозначены термином «шиканы» (на трассах «Формулы-1» так называется связка из поворотов, заставляющая сбросить скорость). Такие островки предлагается обустраивать на односторонних улицах или двусторонних с интенсивностью движения не более 500 машин в сутки, без примыканий и выездов со дворов.
Такие островки предлагается обустраивать на односторонних улицах или двусторонних с интенсивностью движения не более 500 машин в сутки, без примыканий и выездов со дворов.
Для предотвращения выхода пешеходов на проезжую часть вне переходов ГОСТ рекомендует применять «сплошную посадку кустарника» или устанавливать ограждения.
В столичном Центре организации дорожного движения (ЦОДД) сообщили, что пока не получили проект нового ГОСТа, но отметили, что ведомство поддерживает «все инициативы по снижению количества ДТП с пешеходами». В свою очередь глава Союза пешеходов Владимир Соколов считает, что разработчики ГОСТа не учли, что при ограничении скорости в 60 километров в час водители едут со скоростью почти 80 километров в час, поскольку превышение скорости в пределах 20 километров в час не наказывается штрафом. Соколов также завил, что документ не учитывает распространение электросамокатов, для которых нужно создавать отдельную инфраструктуру.
Наконец, глава экспертного центра Probok. net Александр Шумский назвал допустимым создание нерегулируемого перехода через четырехполосную дорогу при наличии островка безопасности. «Но бывают ситуации, когда в час пик по дороге проезжает огромное количество машин и использовать нерегулируемый пешеходный переход нельзя. Зато в остальное время суток там пусто. В итоге ежесуточные показатели не превышаются, все соответствует ГОСТу, а по факту создается опасная ситуация», — предупредил Шумский.
net Александр Шумский назвал допустимым создание нерегулируемого перехода через четырехполосную дорогу при наличии островка безопасности. «Но бывают ситуации, когда в час пик по дороге проезжает огромное количество машин и использовать нерегулируемый пешеходный переход нельзя. Зато в остальное время суток там пусто. В итоге ежесуточные показатели не превышаются, все соответствует ГОСТу, а по факту создается опасная ситуация», — предупредил Шумский.
с помощью Cellular Automaton
Микромоделирование дорожного движения, основанное на индивидуальном движении всех задействованных транспортных средств, теперь признано важным инструментом для описания, понимания и управления дорожным движением. Клеточные автоматы (CA) — очень эффективный способ реализовать движение транспортного средства. CA — это методология, которая использует дискретное пространство для представления состояния каждого элемента домена, и это состояние может быть изменено в соответствии с правилом перехода. Хорошо известная модель клеточного автомата Нэша с измененным размером ячейки и переменной скоростью ускорения расширена до двухполосной модели клеточного автомата для транспортного потока.Для обеспечения маневров при смене полосы движения применяется набор государственных правил. Правило S-t-s, данное в модели BJH, которое описывает поведение транспортного средства, попавшего в затор, реализовано в настоящей модели, и изучено влияние изменчивости транспортного потока на поведение при смене полосы движения. Скорость потока между однополосной дорогой и двухполосной дорогой, где транспортные средства меняют полосу движения, чтобы избежать столкновения, также сравнивается под влиянием правила с-с-с и правила торможения. Используя результаты численного моделирования, мы проанализировали фундаментальную диаграмму транспортного потока и показали, что вероятность s-t-s имеет большее влияние, чем вероятность торможения, на маневр при смене полосы движения.
Хорошо известная модель клеточного автомата Нэша с измененным размером ячейки и переменной скоростью ускорения расширена до двухполосной модели клеточного автомата для транспортного потока.Для обеспечения маневров при смене полосы движения применяется набор государственных правил. Правило S-t-s, данное в модели BJH, которое описывает поведение транспортного средства, попавшего в затор, реализовано в настоящей модели, и изучено влияние изменчивости транспортного потока на поведение при смене полосы движения. Скорость потока между однополосной дорогой и двухполосной дорогой, где транспортные средства меняют полосу движения, чтобы избежать столкновения, также сравнивается под влиянием правила с-с-с и правила торможения. Используя результаты численного моделирования, мы проанализировали фундаментальную диаграмму транспортного потока и показали, что вероятность s-t-s имеет большее влияние, чем вероятность торможения, на маневр при смене полосы движения.
1. Введение
Клеточные автоматы (CA) — это математическая машина, которая возникает на основе очень простых математических принципов. Хотя вначале они очень просты, у CA есть множество приложений. Он широко используется для моделирования однополосного движения. Некоторые модификации необходимы, чтобы распространить эти модели на двухполосное движение, поскольку они обычно не объясняют поведение при смене полосы движения. Первая модель транспортного потока, использующая концепцию одномерного СА, была предложена Нагелем-Шрекенбергом, широко известная как модель Наша [1].Подход простой теории среднего поля предполагает, что два соседних узла полностью некоррелированы. Также была исследована простая модель для двухполосного трафика, но правила обновления не были определены таким же образом, как в модели Nasch. Было обнаружено, что основная диаграмма для каждой полосы движения асимметрична, но максимум смещен в сторону больших значений плотности движения транспорта (). Модель двухполосного клеточного автомата, основанная на однополосном СА, введенная Rickert et al. был рассмотрен [2]. Был сделан вывод, что как для симметричной, так и для асимметричной версии максимальный расход более чем в два раза превышает максимальный расход однополосной модели.
Хотя вначале они очень просты, у CA есть множество приложений. Он широко используется для моделирования однополосного движения. Некоторые модификации необходимы, чтобы распространить эти модели на двухполосное движение, поскольку они обычно не объясняют поведение при смене полосы движения. Первая модель транспортного потока, использующая концепцию одномерного СА, была предложена Нагелем-Шрекенбергом, широко известная как модель Наша [1].Подход простой теории среднего поля предполагает, что два соседних узла полностью некоррелированы. Также была исследована простая модель для двухполосного трафика, но правила обновления не были определены таким же образом, как в модели Nasch. Было обнаружено, что основная диаграмма для каждой полосы движения асимметрична, но максимум смещен в сторону больших значений плотности движения транспорта (). Модель двухполосного клеточного автомата, основанная на однополосном СА, введенная Rickert et al. был рассмотрен [2]. Был сделан вывод, что как для симметричной, так и для асимметричной версии максимальный расход более чем в два раза превышает максимальный расход однополосной модели. Введение небольшого количества медленных транспортных средств может инициировать образование кластеров с меньшей плотностью [3]. При асимметричных правилах смены полосы движения медленные автомобили меньше влияют на производительность системы, чем в симметричном случае. В модели двухполосного транспортного потока, если плотность автомобилей задана в пределах диапазона, наблюдалась самоорганизация медленных и быстрых полос, несмотря на симметрию между двумя полосами [4]. На графике поток-плотность наблюдается несколько ветвей и гистерезис. Были представлены результаты относительно простой модели CA без периодических граничных условий для автомагистрали с переменным количеством съездов [5].Двухмерная расширенная версия одномерной модели Фукуи-Исибаши, разработанная Ван и др. [6], был представлен для однополосного движения, чтобы учесть обмен транспортными средствами между первой и второй полосой [6]. В целом правило смены полосы движения может быть симметричным или асимметричным по отношению к полосам движения или транспортным средствам.
Введение небольшого количества медленных транспортных средств может инициировать образование кластеров с меньшей плотностью [3]. При асимметричных правилах смены полосы движения медленные автомобили меньше влияют на производительность системы, чем в симметричном случае. В модели двухполосного транспортного потока, если плотность автомобилей задана в пределах диапазона, наблюдалась самоорганизация медленных и быстрых полос, несмотря на симметрию между двумя полосами [4]. На графике поток-плотность наблюдается несколько ветвей и гистерезис. Были представлены результаты относительно простой модели CA без периодических граничных условий для автомагистрали с переменным количеством съездов [5].Двухмерная расширенная версия одномерной модели Фукуи-Исибаши, разработанная Ван и др. [6], был представлен для однополосного движения, чтобы учесть обмен транспортными средствами между первой и второй полосой [6]. В целом правило смены полосы движения может быть симметричным или асимметричным по отношению к полосам движения или транспортным средствам. В то время как симметричные правила относятся к обеим полосам движения одинаково, асимметричные наборы правил особенно должны применяться для моделирования немецких автомагистралей, где при смене полосы движения преобладают предпочтения правой полосы и запрет обгона правой полосы [7].Новая модель КА путем введения эффекта Хонка в основную симметричную двухполосную модель КА была предложена в [8]. Набор правил смены полосы движения (STCA), предложенный Chowdhury et al. [9] был изменен с учетом эффекта гудка (H-STCA). Сравнивалась частота смены полосы движения для быстрых и медленных транспортных средств для обеих моделей, STCA и H-STCA, и было обнаружено, что введение гудка улучшает характеристики смешанного движения транспортных средств в диапазоне средней плотности. Была представлена простая модель исключения на основе решетки, которую можно рассматривать как грубое представление движения на двухполосной автомагистрали [10].Модель представляет собой двухполосное обобщение асимметричного простого процесса исключения, который, как известно, воспроизводит некоторые особенности однополосного движения, такие как удары и заторы.
В то время как симметричные правила относятся к обеим полосам движения одинаково, асимметричные наборы правил особенно должны применяться для моделирования немецких автомагистралей, где при смене полосы движения преобладают предпочтения правой полосы и запрет обгона правой полосы [7].Новая модель КА путем введения эффекта Хонка в основную симметричную двухполосную модель КА была предложена в [8]. Набор правил смены полосы движения (STCA), предложенный Chowdhury et al. [9] был изменен с учетом эффекта гудка (H-STCA). Сравнивалась частота смены полосы движения для быстрых и медленных транспортных средств для обеих моделей, STCA и H-STCA, и было обнаружено, что введение гудка улучшает характеристики смешанного движения транспортных средств в диапазоне средней плотности. Была представлена простая модель исключения на основе решетки, которую можно рассматривать как грубое представление движения на двухполосной автомагистрали [10].Модель представляет собой двухполосное обобщение асимметричного простого процесса исключения, который, как известно, воспроизводит некоторые особенности однополосного движения, такие как удары и заторы. Влияние агрессивного поведения при смене полосы движения на двухполосной дороге в присутствии медленных и быстрых транспортных средств было дополнительно изучено [11]. Результаты моделирования показывают, что агрессивное поведение быстрых транспортных средств при смене полосы движения может ослабить пробку, образованную медленными транспортными средствами, и улучшить транспортный поток в смешанном потоке в зоне средней плотности.Была представлена модель потока движения на автомагистрали с завалом, вызванным ДТП, в которой были приняты как симметричные, так и асимметричные правила смены полосы движения [12]. Путем численного моделирования сделан вывод о том, что аварийное транспортное средство не только вызывает локальную пробку позади него, но и заставляет транспортные средства группироваться на объездной полосе. Кроме того, обнаружено, что транспортные средства будут чаще менять полосу движения, когда движение транспорта неоднородно с автомобилем, попавшим в аварию. При наличии сигнального перекрестка исследуется наличие определенной комбинации плотности и времени цикла, которая оптимизирует эффективность движения в двухполосной модели из-за обгона [13].
Влияние агрессивного поведения при смене полосы движения на двухполосной дороге в присутствии медленных и быстрых транспортных средств было дополнительно изучено [11]. Результаты моделирования показывают, что агрессивное поведение быстрых транспортных средств при смене полосы движения может ослабить пробку, образованную медленными транспортными средствами, и улучшить транспортный поток в смешанном потоке в зоне средней плотности.Была представлена модель потока движения на автомагистрали с завалом, вызванным ДТП, в которой были приняты как симметричные, так и асимметричные правила смены полосы движения [12]. Путем численного моделирования сделан вывод о том, что аварийное транспортное средство не только вызывает локальную пробку позади него, но и заставляет транспортные средства группироваться на объездной полосе. Кроме того, обнаружено, что транспортные средства будут чаще менять полосу движения, когда движение транспорта неоднородно с автомобилем, попавшим в аварию. При наличии сигнального перекрестка исследуется наличие определенной комбинации плотности и времени цикла, которая оптимизирует эффективность движения в двухполосной модели из-за обгона [13].
В настоящем исследовании размер ячейки уменьшен и учитывается переменная скорость ускорения (а не 1) [14]. Здесь мы рассматриваем двухполосное движение и принимаем правила симметричной смены полосы движения, в которых учитываются стимулы и критерии безопасности. Правило замедления старта (s-t-s), используемое в широко известной модели CA Бенджамина-Джонсона-Хи (BJH) для моделирования однополосного движения [15], реализовано для моделирования двухполосного движения. Также обсуждается модель BJH и учитывается слегка измененное правило замедления для более точного моделирования поведения при торможении транспортных средств [2 ] .Правило замедленного старта в модели BJH применимо только к неподвижным транспортным средствам, то есть к транспортным средствам, которые полностью заблокированы ведущим транспортным средством на предыдущем временном шаге. Это правило не применяется к тем транспортным средствам, которые остановлены из-за рандомизации на предыдущем временном шаге. Мы выбрали модель BJH в настоящем исследовании по той причине, что она имеет чрезвычайно простые правила перехода, которые легко реализовать на двухполосной дороге.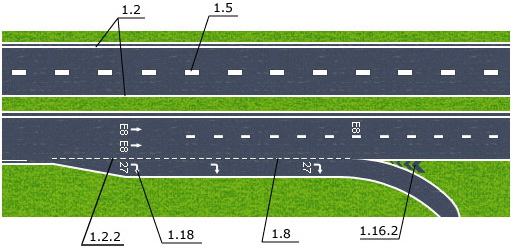 Мы исследуем влияние с-т-с и правил торможения на маневр при смене полосы движения среди транспортных средств на двухполосной дороге, и с помощью моделирования проводится подробное сравнение влияния вероятности торможения и вероятности с-т-с в потоке двухполосного движения.Результаты моделирования показывают, что изменчивость транспортного потока оказывает значительное влияние на поведение транспортного средства при смене полосы движения.
Мы исследуем влияние с-т-с и правил торможения на маневр при смене полосы движения среди транспортных средств на двухполосной дороге, и с помощью моделирования проводится подробное сравнение влияния вероятности торможения и вероятности с-т-с в потоке двухполосного движения.Результаты моделирования показывают, что изменчивость транспортного потока оказывает значительное влияние на поведение транспортного средства при смене полосы движения.
2. Модель сотового автомата
Модель Нагеля-Шрекенберга — это вероятностная модель CA для описания движения на однополосных шоссе. Математически это выражается четырьмя следующими правилами.
Правило 1. Ускорение:.
Правило 2. Замедление:.
Правило 3. Рандомизация:
Схема двустороннего движения для «Скоростной автомагистрали Шуто C1»
В этом редком сценарии город Токио сильно пострадал от землетрясения, и электричество отключилось почти повсюду.Половина C1 приведена в негодность, и встревоженные автомобилисты вынуждены ездить с двусторонним движением по внешней кольцевой дороге. Тем не менее крутые мальчишки с их дорогими игрушками готовы поиграть в бирки …
Тем не менее крутые мальчишки с их дорогими игрушками готовы поиграть в бирки … Установить:
Сначала у вас должна быть трасса
«Shuto Expressway C1». Затем извлеките все из «Схема двустороннего движения для Shuto Expressway C1.7z» в свою игру «.. \ AssettoCorsa \ content \ track \ c1 \» и подтвердите запрос.Оригинальные макеты остались без изменений:
Используйте двухсторонний режим в «Trackday» или «Weekend», чтобы начать с пит-стопов.
«AI Flood» хорошо работает, чтобы окружить вас безумным движением, даже если в ямах содержится только 11 AI. Если вы хотите сделать их 23 — отредактируйте это
Дайте больше места для AI:
Чтобы небо было не за коричневой стеной на дальнем фоне, отключите «Weather FX» перед загрузкой трека «C1» и выберите некоторые стандартные погодные условия, отличные от солнечной.ПП-фильтр можно оставить без изменений (Sol).

Или взгляните на это исправление для полного решения .
Этот двусторонний курс также может работать на версии трека «c1-midnight_v13». Для этого после распаковки с моего 7z вам нужно сделать копию «models_c1_out.ini»
и переименуйте его в «models_2way.ini», заменив тот, что был от 7z.
Игроки, у которых есть не полуночная версия, могут иметь уличное освещение ночью после размещения этого «c1».ini «в папке с игрой» .. \ AssettoCorsa \ extension \ config \ routes \ loaded \ «.
Чтобы исправить ошибку часового пояса (загрузка всегда ночью) см. этот пост.
Персональный вкус машины для такого рода уличная драка >> легкая, быстрая и чрезвычайно маневренная Praga Turbo.
Примечание: прежде чем вы спросите «Почему это, а не Shuto Revival?», я отвечаю: «Revival» — это бета 0.9 на момент написания этой статьи, но до сих пор нет. У меня есть барьеры. Когда выйдет v1.0, я обязательно посмотрю. А пока вы можете попробовать другие линии для двухполосной петли на части «SRP». Хорошо протестировано на v0.8 и v0.8.1, не работает на v0.9. Парень, который их сделал, проделал половину работы на двухполосных шлицах. Вы должны закончить это, переделав «pit_lane.ai», чтобы боковые линии «fast_lane.ai» обновились должным образом. Имейте в виду, что процесс не быстрый, и вам нужно терпение. Тогда не забудьте переименовать новые файлы (удалив расширения «.candidate»), чтобы заменить старые в папке «.. \ AssettoCorsa \ content \ track \ shuto_revival_project_beta \ shuto_revival_traffic \ ai \». Конечный результат должен быть
Хорошо протестировано на v0.8 и v0.8.1, не работает на v0.9. Парень, который их сделал, проделал половину работы на двухполосных шлицах. Вы должны закончить это, переделав «pit_lane.ai», чтобы боковые линии «fast_lane.ai» обновились должным образом. Имейте в виду, что процесс не быстрый, и вам нужно терпение. Тогда не забудьте переименовать новые файлы (удалив расширения «.candidate»), чтобы заменить старые в папке «.. \ AssettoCorsa \ content \ track \ shuto_revival_project_beta \ shuto_revival_traffic \ ai \». Конечный результат должен быть
Приятного вождения!
Tesla Autopilot предлагает смену полосы движения на встречное движение
Функция «Навигация на автопилоте»Tesla, которая позволяет автономно менять полосу движения на шоссе, предложила водителю Model 3 перестроиться на встречное движение.
Предполагалось, что Navigate on Autopilot будет в первом выпуске обновления программного обеспечения Tesla v9, но они решили вытащить его для дальнейшей проверки.
Предполагалось, что эта функция позволит управлять движением с рампы на съезд по шоссе, при этом система будет самостоятельно менять полосу движения в зависимости от скорости и пункта назначения, введенного в систему навигации.
Как мы сообщали в прошлом году, Tesla начала выпускать эту функцию в своем обновлении программного обеспечения 2018.42, но оно не выполняет автоматическую смену полосы движения.Функция «Навигация на автопилоте» предлагает смену полосы движения, и водителям необходимо инициировать ее с помощью мигалки.
В марте Tesla начала выпускать новое обновление, которое позволяет системе Navigate on Autopilot самостоятельно инициировать смену полосы движения без предварительного запроса водителя.
Автопроизводитель уже осуществил более 9 миллионов смен полосы движения — в основном без проблем, но для водителей по-прежнему важно оставаться внимательными и быть готовыми взять на себя управление.
Tesla hacker green показала хороший пример того, почему это важно. Он поделился фотографией владельца Model 3, использующего навигацию на автопилоте и получающего предложение о смене полосы движения в приближающемся потоке:
Он поделился фотографией владельца Model 3, использующего навигацию на автопилоте и получающего предложение о смене полосы движения в приближающемся потоке:
Я понятия не имел, что в Квебеке разрешено движение NoA на двухполосных неразделенных дорогах!
Записка на французском гласит: «Эй, я такой мрачный сегодня, давай закончим жизни и попробуем снова с точки сохранения, ударив по полу». (к / к)
(изображение друзей из Канады)
Кому-нибудь нужно быстро поправить карты! pic.twitter.com/rgQaeyWs6W— зеленый (@greentheonly) 21 мая 2019 г.
Как показано на изображении, Model 3 движется по двухполосной нераздельной дороге с двусторонним движением, и тем не менее, Tesla Navigate на автопилоте предлагает перейти на левую полосу, даже если нет транспортного средства для проезда и есть встречный транспорт на дороге. левый ряд:
Мы связались с Tesla по поводу проблемы и сообщим, если получим ответ о ситуации.
Electrek’s Take
У меня есть большой опыт вождения с использованием системы навигации на автопилоте в Квебеке. Я заметил, что он будет работать не только на шоссе, но и на неразделенных дорогах, но я не помню, чтобы он когда-либо предлагал смену полосы движения на этих дорогах.
Причина этого предложения неясна. Вполне возможно, что следующий маршрут требовал поворота налево, и автопилот считал, что автомобиль должен быть на левой полосе, чтобы повернуть налево.
В этом случае это будет проблема с картами автопилота, но это не на 100% ясно.
Это, безусловно, тревожно и служит отличным напоминанием о необходимости всегда оставаться бдительным и быть готовым взять на себя управление при использовании автопилота или навигации на автопилоте.
FTC: Мы используем автоматические партнерские ссылки для получения дохода. Подробнее.
Подпишитесь на Electrek на YouTube, чтобы смотреть эксклюзивные видео, и подписывайтесь на подкаст.