Электронный дифференциал: Блокировка дифференциала EDL: особенности и специфика работы
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Тормозное управление
Системы управления тормозами
Электронная блокировка дифференциала (EDS)
Электронная блокировка дифференциала создавалась как функция помощи при трогании.
Следующий
пример иллюстрирует поведение колёс ведущей оси с обычным, неблокирующимся,
дифференциалом (рис.5.2.43, а): одно из колёс ведущей оси находится на
скользком покрытии (малый коэффициент трения между дорожным покрытием и шиной),
другое колесо той же оси стоит на асфальте с высоким коэффициентом трения.
Колесо на скользкой поверхности будет вращаться с большей скоростью, поскольку
меньшая сила трения между шиной и поверхностью оказывает меньшее сопротивление
вращению колеса. В крайних случаях (при очень скользкой поверхности, например,
на льду) одно колесо будет проворачиваться, тогда как противоположное колесо
будет стоять неподвижно. Вся мощность двигателя уйдёт при этом на трение между
колесом и дорогой, а не на создание тяги. Причина такого поведения заключается
в принципе работы дифференциала, который по своей конструкции может передавать
на оба колеса только одинаковый крутящий момент.
Вся мощность двигателя уйдёт при этом на трение между
колесом и дорогой, а не на создание тяги. Причина такого поведения заключается
в принципе работы дифференциала, который по своей конструкции может передавать
на оба колеса только одинаковый крутящий момент.
Рисунок 5.2.43 – Поведение колес ведущей оси:
а – без EDS; б – с EDS
Если одно из колёс прокручивается, передаваемый им крутящий момент снижается. И тогда в неблагоприятных условиях (например, одно колесо на льду) крутящий момент настолько мал, что его недостаточно для приведения в движение другого колеса. В этом случае автомобиль остаётся стоять на месте с одним пробуксовывающим и одним неподвижным колесом (ведущей оси).
В
таких случаях на помощь приходит так называемая электронная блокировка
дифференциала или EDS. Смысл этой функции в том, что колесо, вращающееся с
большей скоростью (т.е. имеющее большее проскальзывание), подтормаживается с
определённым тормозным моментом (рис.
Для реализации функции электронной блокировки дифференциала EDS требуется активное (без участия водителя) создание тормозного давления. Чтобы для этого можно было использовать уже имеющийся в системе ABS насос обратной подачи, к системе добавляются четыре дополнительных клапана.
 Чтобы при этом у функции ABS сохранялась
возможность уменьшения тормозного давления с обратной подачей тормозной
жидкости с преодолением давления, созданного водителем, этот канал должен при
необходимости перекрываться. Такое перекрывание реализуется двумя
дополнительными клапанами высокого давления 26 (по одному в контуре каждого из
ведущих колес) (рис.5.2.44).
Чтобы при этом у функции ABS сохранялась
возможность уменьшения тормозного давления с обратной подачей тормозной
жидкости с преодолением давления, созданного водителем, этот канал должен при
необходимости перекрываться. Такое перекрывание реализуется двумя
дополнительными клапанами высокого давления 26 (по одному в контуре каждого из
ведущих колес) (рис.5.2.44).Рисунок 5.2.44 – Схема гидравлического блока с клапанами EDS
Для срабатывания электронной блокировки дифференциала (EDS) должен быть перекрыт, напротив, канал подачи тормозной жидкости от насоса к бачку, чтобы насос обратной подачи мог создавать давление в контуре соответствующего колеса. Для реализации этой функции устанавливаются ещё два дополнительных электромагнитных клапана 25, по одному в контуре каждого из ведущих колёс.
Распознавание
необходимости блокировки дифференциала, расчёт параметров блокировки и
формирование управляющих команд для соответствующих электромагнитных клапанов и
насоса обратной подачи осуществляется дополнительным программным обеспечением в
блоке управления ABS.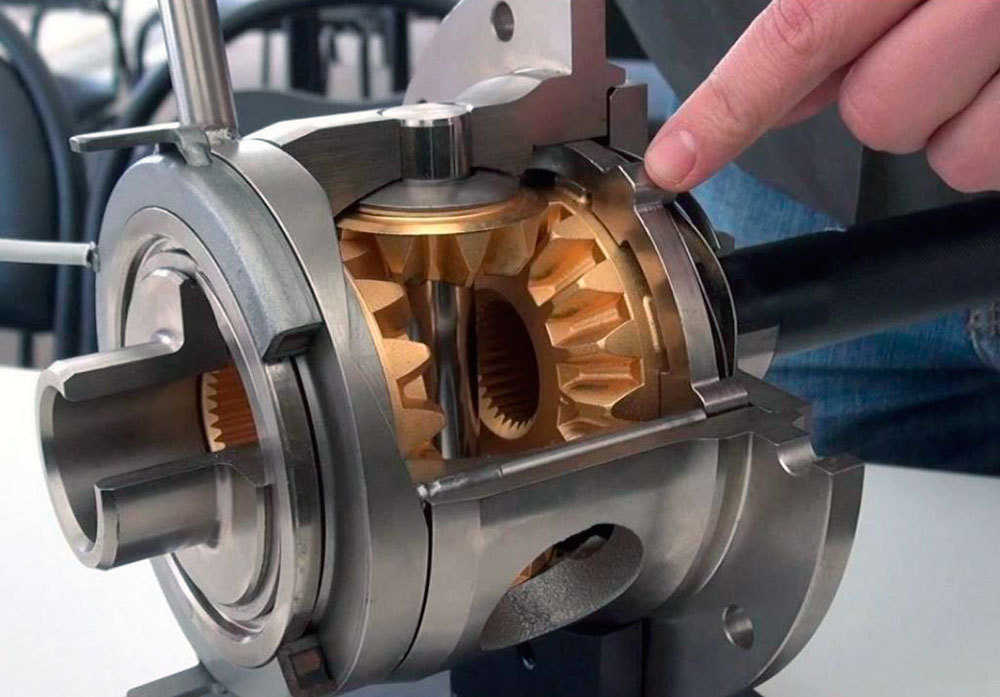 Других изменений в компонентах системы ABS для
реализацииэлектронной блокировки дифференциала (EDS) не требуется.
Других изменений в компонентах системы ABS для
реализацииэлектронной блокировки дифференциала (EDS) не требуется.
На основании данных о угловых скоростях колёс функция EDS устанавливает, что одно из колёс ведущей оси имеет более высокое проскальзывание, другими словами, вращается быстрее, чем другое. Функция EDS должна подтормозить прокручивающееся колесо, чтобы ведущая ось могла вновь передавать крутящий момент.
Как и в самой системе ABS, управление давлением осуществляется по трём фазам: «увеличение давления», «удержание давления» и «сброс давления».
1. Увеличение давления (рис.5.2.45)
Рисунок 5.2.45 — Режим EDS «увеличение давления»
Для
увеличения (создания) давления переключающий клапан закрывается, а клапан высокого
давления открывается. Насос обратной подачи включается и начинает перекачивать
жидкость из главного тормозного цилиндра в тормозной цилиндр проворачивающегося
колеса.
Создаваемое в нём тормозное давление приводит к подтормаживанию колеса.
2. Удержание давления (рис.5.2.46)
Рисунок 5.2.46 — Режим EDS «удержание давления»
Для удержания давления в контуре соответствующего колеса насос обратной подачи отключается. Переключающий клапан остаётся закрытым.
В контуре колеса удерживается постоянное тормозное давление.
3. Сброс давления (рис.5.2.47)
Рисунок 5.2.47 — Режим EDS «сброс давления»
Для сбрасывания давления на впускной и переключающий клапаны перестаёт подаваться напряжение, т.е. они открываются.
При
активном торможении элементы тормозной системы нагреваются. Чтобы не допустить
их перегрева и, как следствие, повреждения, в программном обеспечении имеется температурная
модель тормозных механизмов. С её помощью температура тормозных дисков
рассчитывается исходя из длительности торможения, скорости движения, тормозного
давления и параметров материала деталей тормозной системы. По мере достижения
предельных значений температуры функция постепенно отключается.
По мере достижения
предельных значений температуры функция постепенно отключается.
Электронная блокировка дифференциала EDS действует только до определённой скорости, зависящей от модели автомобиля.
Электронный учебник по математическому анализу
4.2.1 Определение и основные свойства первого дифференциала
Пусть в некоторой окрестности точки $x_0$ задана функция $y=f(x)$, причем $f(x)$ дифференцируема в точке $x_0$.
Определение. Первым дифференциалом функции $f(x)$ в точке $x=x_0$ называется выражение $df(x_0,\Delta x)=f'(x_0)\cdot \Delta x$, где величина $\Delta x$ предполагается достаточно малой.
Замечание. Если $f(x)=x$, то имеем: $dx=\Delta x$. Это равенство выполняется, когда $x$ является независимой переменной.
Из определения производной следует, что
\[
\frac{\Delta f}{\Delta x}=\frac{f(x_0+\Delta x)-f(x_0)}{\Delta x} \xrightarrow[\Delta x\to 0]{} f'(x_0),
\]
так что
\[
\frac{\Delta f}{\Delta x} — f'(x_0) = \alpha (\Delta x), \quad \alpha (\Delta x)\xrightarrow[\Delta x\to 0]{} 0. 2.$
2.$
4.2.2 Геометрический смысл первого дифференциала
Рассмотрим график функции $y=f(x)$ в окрестности точки $x$ и касательную к графику, проведенную через точку $(x,f(x)$.
Рис 3: К геометрическому смыслу первого дифференциала
Из картинки ясно, что отрезок $df$ — это то, что отсекают касательная и прямая $y=f(x)$ на вертикальной прямой, проходящей через $x+\Delta x$.
4.2.3 Дифференциал сложной функции. Инвариантность первого дифференциала
Пусть $y=f(x)$, $z=h(y)$, причем эти функции дифференцируемы при всех интересующих нас $x,y$. Подставляя $y=f(x)$ в аргумент функции $z=h(y)$, получим сложную функцию $z=h(f(x))$. Выпишем ее первый дифференциал,
\[
dz=\left(h(f(x))\right)’\Delta x.
\]
Используя правило дифференцирования сложной функции, получаем:
\[
dz=\frac{dh}{dy}\cdot \frac{df}{dx}\Delta x.
\]
Однако согласно определению первого дифференциала, $\frac{df}{dx}\Delta x =dy$, так что предыдущее равенство переписывается в виде:
\[
dz=\frac{dh}{dy}dy.
Ferrari F430 цена у официального дилера Авилон
Настоящим Я, в соответствии с требованиями Федерального закона от 27.07.2006 г. №152-ФЗ «О персональных данных» даю свое согласие лично, своей волей и в своем интересе на обработку (сбор, систематизацию, накопление, хранение, уточнение (обновление, изменение), использование, распространение, передачу (включая трансграничную передачу), обезличивание, блокирование и уничтожение) моих персональных данных, в т.ч. с использованием средств автоматизации.
Согласие предоставляется в отношении следующих персональных данных: Фамилия, имя, отчество, Год, месяц, дата рождения; Пол; Контактные телефоны; Контактный адрес; Контактный email; адрес; Сведения о профессиональной деятельности; Модель приобретенного; обслуживаемого автомобиля; Название дилерского центра, где приобретен / обслуживался / ремонтировался а/м; Дата выдачи автомобиля при покупке / из сервиса; Государственный номерной знак автомобиля; VIN –номер автомобиля; Пробег автомобиля; Перечень работ, проведенных с автомобилем; Перечень замененных деталей.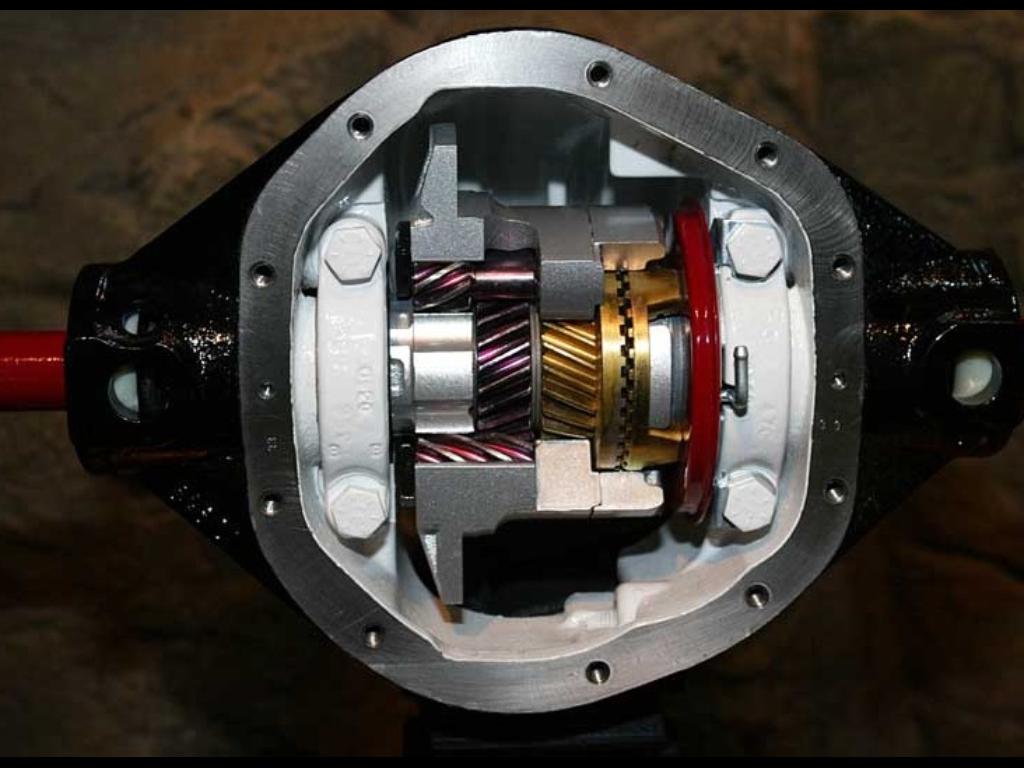
Согласие предоставляется в целях определения потребностей в производственной мощности, мониторинга исполнения сервисными центрами гарантийной политики; ведения истории обращения в сервисные центры; проведения маркетинговых исследований в области продаж, сервиса и послепродажного обслуживания; для рекламных, исследовательских, информационных, а также иных целей.
Предоставляя свои персональные данные, я даю согласие на направление мне рекламной информации и участие в маркетинговых опросах.
Согласие предоставляется:
- АО «Авилон АГ», адрес: 109316, г. Москва, Волгоградский пр., д.43, корп.3
Я выражаю согласие на передачу моих персональных данных:
- АО «АкитА», адрес: 109316, г. Москва, просп. Волгоградский, д. 43, корп. 3
Согласие действует 75 лет и может быть отозвано в любой момент на основании письменного заявления.
Электронный дифференциал
В автомобильной технике электронный дифференциал представляет собой форму дифференциала , который обеспечивает требуемый крутящий момент для каждого ведущего колеса и допускает различные скорости вращения колес. Он используется вместо механического дифференциала в многоприводных системах. При прохождении поворотов внутреннее и внешнее колеса вращаются с разной скоростью, потому что внутренние колеса описывают меньший радиус поворота. Электронный дифференциал использует управляющий сигнал с рулевого колеса и сигналы скорости двигателя для управления мощностью каждого колеса, чтобы все колеса получали необходимый им крутящий момент.
Он используется вместо механического дифференциала в многоприводных системах. При прохождении поворотов внутреннее и внешнее колеса вращаются с разной скоростью, потому что внутренние колеса описывают меньший радиус поворота. Электронный дифференциал использует управляющий сигнал с рулевого колеса и сигналы скорости двигателя для управления мощностью каждого колеса, чтобы все колеса получали необходимый им крутящий момент.
Классическая автомобильная трансмиссия состоит из одного двигателя внутреннего сгорания, передающего крутящий момент на одно или несколько ведущих колес. Наиболее распространенным решением является использование механического устройства для распределения крутящего момента на колеса. Этот механический дифференциал допускает различную скорость вращения колес при прохождении поворотов. С появлением электромобилей возможны новые конфигурации трансмиссии. Многоприводные системы становятся простыми в реализации благодаря большой удельной мощности электродвигателей . Эти системы, обычно с одним двигателем на ведущее колесо, нуждаются в дополнительном контроллере верхнего уровня, который выполняет ту же задачу, что и механический дифференциал.
Эти системы, обычно с одним двигателем на ведущее колесо, нуждаются в дополнительном контроллере верхнего уровня, который выполняет ту же задачу, что и механический дифференциал.
Несколько применений этой технологии оказались успешными и позволили повысить производительность автомобиля. Диапазон применения широк и включает в себя огромный T 282B [2] от Liebherr , который считается самым большим грузовиком в мире. Этот самосвал приводится в движение электрической силовой установкой, состоящей из двух независимых электродвигателей. Эти двигатели, обеспечивающие максимальную мощность 2700 кВт, регулируются, чтобы регулировать их скорость при прохождении поворотов, что увеличивает сцепление с дорогой и снижает износ шин . Элиика _также оснащен электронным дифференциалом; Этот восьмиколесный электромобиль способен развивать скорость до 370 км/ч, сохраняя при этом идеальный контроль крутящего момента на каждом колесе. Также доступны транспортные средства меньшего размера для тяговых целей и контроллеры System on Chip для общих автомобильных приложений.
Какой полный привод мне на самом деле нужен? Есть ответ! — журнал За рулем
Многие хотят ездить на полноприводном кроссовере. Но полный привод бывает разный, и ведет он себя по-разному.
Материалы по теме
Вы наверняка слышали выражение «честный полный привод». Так вот, главное — не понимать его буквально. Только представьте, что все четыре колеса машины крутятся одинаково — с одной скоростью. Автомобиль при этом практически теряет возможность маневрировать. По этой причине в свое время и был придуман межколесный дифференциал, позволяющий колесам одной оси двигаться с разной угловой скоростью.
Существуют три основные системы полного привода, которые мы можем встретить на современных кроссоверах и легковых автомобилях.
1. Внедорожный
На настоящих внедорожниках полный привод включается ручками, с помощью раздаточной коробки, которая также имеет понижающие передачи для увеличения крутящего момента на колесах. Будучи включенным, 4WD передает крутящий момент на все колеса в равной степени, но благодаря дифференциалам получают его только те, которые хуже других зацепились за грунт. При блокировке дифференциалов крутящий момент приходит и на зацепившиеся за грунт колеса. При этом автомобиль теряет управляемость — возможность поворачивать. Нужен ли такой жестко заблокированный полный привод не в луже с грязью? Вряд ли. Это временный инструмент для преодоления жесткого бездорожья, поэтому оснащаются им такие автомобили, как Лада Нива, Toyota Land Cruiser Prado, Mitsubishi Pajero Sport, Suzuki Jimny или УАЗ.
При блокировке дифференциалов крутящий момент приходит и на зацепившиеся за грунт колеса. При этом автомобиль теряет управляемость — возможность поворачивать. Нужен ли такой жестко заблокированный полный привод не в луже с грязью? Вряд ли. Это временный инструмент для преодоления жесткого бездорожья, поэтому оснащаются им такие автомобили, как Лада Нива, Toyota Land Cruiser Prado, Mitsubishi Pajero Sport, Suzuki Jimny или УАЗ.
В центре вы видите раздаточную коробку, которая управляется подключается либо рычагом, либо с помощью кнопок (по сути — тот же рычаг, но с электроприводом). Там же расположен межосевой дифференциал, который можно заблокировать. Блокируются также задний дифференциал и, реже, передний — ради хоть какой-то управляемости на бездорожье.
Блокируются также задний дифференциал и, реже, передний — ради хоть какой-то управляемости на бездорожье.
2. Постоянный полный
Материалы по теме
Второй тип системы полного привода отлично иллюстрирует quattro от Audi. Это постоянный полный привод AWD, который тоже отличается склонностью к недостаточной поворачиваемости. Вот почему на этих машинах так сложно ездить на пределе. Такой привод в чистом виде заставил бы водителя резко выкручивать рулевое колесо, буквально срывая машину в занос, а затем добавлять газу, чтобы выровнять автомобиль на дороге. Здесь необходимо великолепное водительское мастерство. Поэтому в обычной жизни подобные системы не нашли широкого распространения, а оснащаемые ими автомобили имеют системы стабилизации, не допускающие заносов. Автомобилей с подобной системой не так много, но достаточно. Это Audi, Subaru или Mercedes-Benz.
Крутящий момент раздается на все колеса и контролируется дифференциалами, которые перебрасывают его для лучшей управляемости автомобиля.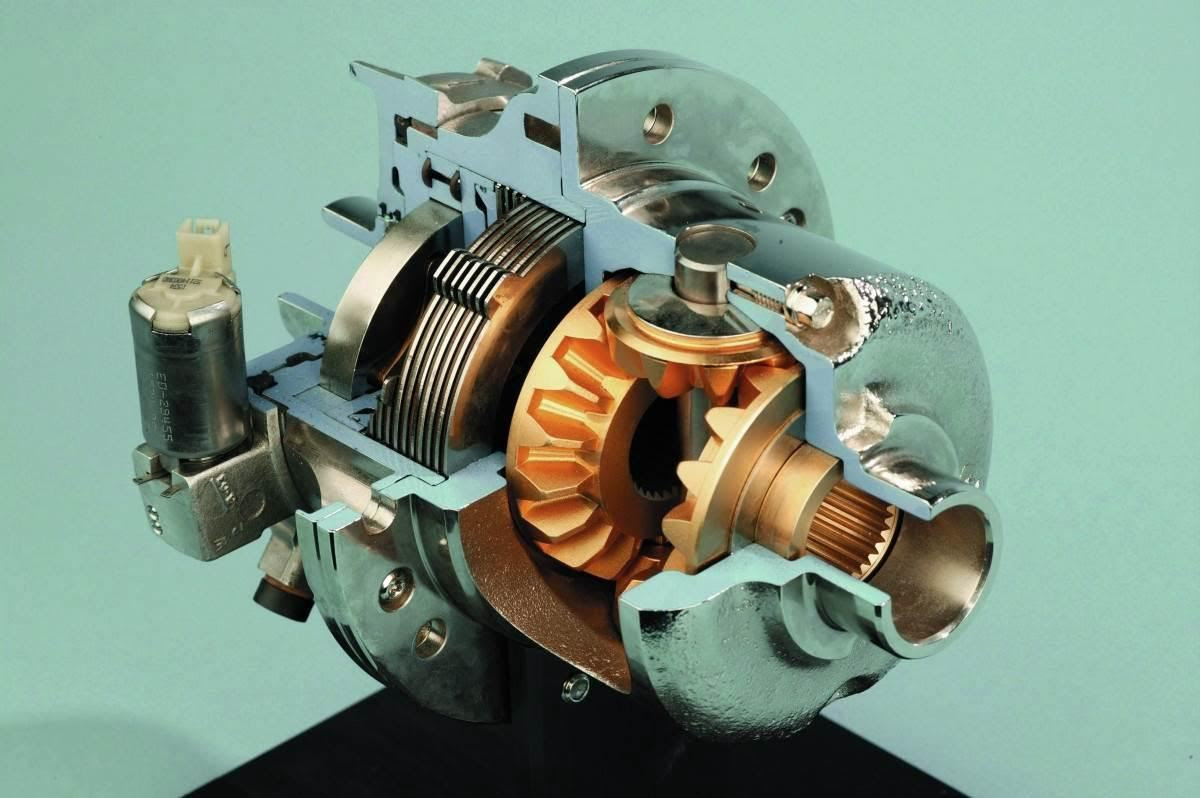
Крутящий момент раздается на все колеса и контролируется дифференциалами, которые перебрасывают его для лучшей управляемости автомобиля.
3. На базе монопривода
Наибольшую популярность приобрели системы полного привода, которые в обычных условиях работают как моноприводные (переднеприводные или заднеприводные). Поэтому такой привод многие автомобилисты считают не «честным полным». Автомобиль при этом «гребет» двумя колесами, а компьютер при необходимости подключает к мотору остальные два. Происходит это благодаря муфте межосевого дифференциала, сцепление в которой может меняться. Таким образом на «дополнительные» ведущие колеса крутящий момент может передаваться в разной степени: от 0% до 50%. Обратите внимание: дополнительные колеса никогда не получат 100% мощности двигателя. В случае, например, с Volvo, Volkswagen, Renault или Hyundai, мощность мотора всегда передается на передние колеса и, по необходимости, часть ее отдается задним. В случае BMW и Jaguar — наоборот. Задние «гребут» всегда, время от времени делясь частью крутящего момента с передними. При этом системы стабилизации могут быть уже не такими строгими и ради забавы допускать небольшие заносы, не угрожающие безопасности.
Задние «гребут» всегда, время от времени делясь частью крутящего момента с передними. При этом системы стабилизации могут быть уже не такими строгими и ради забавы допускать небольшие заносы, не угрожающие безопасности.
Подключаемый полный привод на базе переднего: 1 — щиток приборов; 2 — главный электронный модуль; 3 — блок ABS; 4 — блок управления двигателем; 5 — электронный модуль дифференциала; 6 — муфта «Халдекс». У подключаемого полного привода на базе заднего устройство примерно то же, но с приоритетом задних колес.
Зачем же так «бестолково» разбрасываться крутящим моментом по осям? Ради безопасности и лучшей управляемости. В результате подключения задних колес переднеприводный до этого момента автомобиль в какой-то мере теряет недостаточную поворачиваемость и гораздо лучше вписывается в поворот.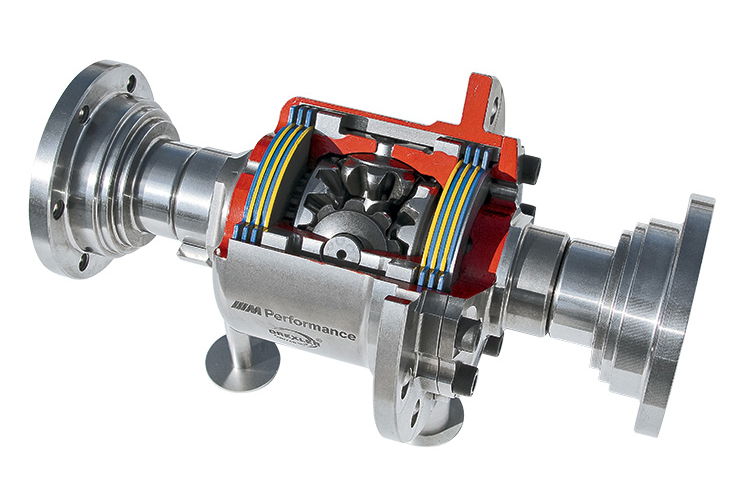 Полноприводная же система на основе заднего привода, подключая передние колеса, снижает степень избыточной поворачиваемости и позволяет войти в вираж чисто, без заноса задней оси и разворота, вытягивая машину на нужную траекторию «гребками» передних колес.
Полноприводная же система на основе заднего привода, подключая передние колеса, снижает степень избыточной поворачиваемости и позволяет войти в вираж чисто, без заноса задней оси и разворота, вытягивая машину на нужную траекторию «гребками» передних колес.
А если всё же…
В случае, если бы автомобиль мог передавать 100% мощности на «вспомогательные» ведущие колеса, вы бы неожиданно для себя и окружающих оказывались за рулем совершенно другого автомобиля с иными повадками. Это опасно, тем более что передача крутящего момента всегда происходит в экстренных ситуациях. Представьте, вы входите в поворот на переднем приводе с недостаточной поворачиваемостью и соответственно работаете рулем. Но вдруг большая часть крутящего момента перемещается назад и появляется заднеприводная избыточная поворачиваемость, а у вас руль вывернут «не так». И вот автомобиль уже крутится волчком, летя с трассы. В случае главных задних колес переброска всей мощности на передние не позволит взять поворот: траектория выпрямится и машина на полном ходу вылетит в кювет.
Исключения
Но некоторые автопроизводители рискнули все же передавать на вспомогательные колеса большую часть крутящего момента. Точнее, имитировать это, заставляя их крутиться чуть быстрее основных. Это система Honda SH—AWD (устанавливалась, например, на седан Legend), системы Mitsubishi Evo и Ford Focus RS. Но это специфичные системы, которые устанавливались лишь на специальные модели, а эффект смены привода длился недолго — до определенного момента перегрева системы, центрального блока сцепления. Более того, действуют они как системы стабилизации, когда в поворотах для сохранения устойчивости не подтормаживается заднее колесо, идущее по меньшему радиусу (к примеру, в левом повороте — заднее левое), а разгоняется идущее по внешнему радиусу (например, в левом повороте — заднее правое).
Система Honda SH-AWD — именно здесь происходит разгон заднего колеса, идущего по внешней траектории в повороте, что временно превращает машину с переднеприводными повадками в юркий заднеприводный автомобиль.
Система Honda SH-AWD — именно здесь происходит разгон заднего колеса, идущего по внешней траектории в повороте, что временно превращает машину с переднеприводными повадками в юркий заднеприводный автомобиль.
Есть еще одна система, с которой в России пока мало знакомы, но чью суть понять проще всего — это полный привод электромобиля, когда у каждого колеса есть собственный электромотор, как у кроссоверов Tesla.
Итог
Таким образом, самая популярная сегодня система полного привода (на основе монопривода) создана исключительно для безопасного вождения, причем скорее всего — в городе. Поэтому на бездорожье толку от нее не так много. Ругать систему не стоит — по той простой причине, что делали ее не для оффроуда.
Фото: Julian Faist / Unsplash, Audi, Volvo, Honda
Электронные дифференциалы повышенного трения | HowStuffWorks
Наконец, мы готовы перейти к сути вопроса: что такое eLSD? Это не последний триповый клубный наркотик для хорошего самочувствия, и он не связан с каким-либо паранормальным явлением или спортивным каналом, о котором мы слышали. Нет, все сводится к выполнению тех же задач, что и обычные самоблокирующиеся дифференциалы, часто с герметизированными гидромуфтами, только со сложной электронной тонкой настройкой.
Нет, все сводится к выполнению тех же задач, что и обычные самоблокирующиеся дифференциалы, часто с герметизированными гидромуфтами, только со сложной электронной тонкой настройкой.
Система eLSD гарантирует, что каждое колесо получает достаточный крутящий момент с помощью электронного блока управления , будь то микрокомпьютеры или главный компьютер автомобиля.Система в электронном виде отслеживает данные, поступающие от различных колесных датчиков, и в случае пробуксовки передает дополнительный крутящий момент на колесо или колеса с наибольшим сцеплением с дорогой. Некоторые модели даже позволяют водителям выбирать определенные настройки системы. Например, активный межосевой дифференциал Mitsubishi позволяет водителям выбирать определенные настройки для движения по дороге, гравию и снегу. Система eLSD также обеспечивает лучшую управляемость на скоростных поворотах и при смене полосы движения, выполняя все задачи стандартных дифференциалов только с компьютеризированной скоростью и точностью.
Система eLSD также может помочь при рыскании автомобиля . Если смотреть сверху, рыскание — это вращение автомобиля вокруг своей центральной точки во время поворота или смены полосы движения. В полноприводных автомобилях задние системы eLSD помогают держать заднюю часть автомобиля точно настроенной на направление передних колес, демпфируя рыскание. Если рыскание достаточно сильное, оно может отправить автомобиль в штопор. По этой причине eLSD иногда называют активными средствами контроля рыскания .
Итак, вот оно: системы eLSD представляют собой компьютеризированную модернизацию дифференциалов повышенного трения, обеспечивающую некоторым из самых роскошных автомобилей на рынке поистине превосходную управляемость.В настоящее время системы eLSD доступны в полноприводных автомобилях Saab, а также в различных моделях автомобилей Mitsubishi, General Motors и Jeep. Часто эта функция фигурирует в общей системе управления шасси или электронной системе стабилизации.
Воспользуйтесь приведенными ниже ссылками, чтобы узнать больше об автомобильных технологиях и управлении транспортными средствами.
Связанные статьи HowStuffWorks
Другие полезные ссылки
Источники
- «Активный контроль рыскания». Мицубиси Моторс.2008 г. (13 ноября 2008 г.) http://www.mitsubishi-cars.co.uk/features/ayc.asp
- «Дифференциалы и дифференциалы повышенного трения». Быстрое вождение. (13 ноября 2008 г.) http://www.drivingfast.net/technology/Differentials.htm
- Ницца, Карим. «Как работают дифференциалы». HowStuffWorks.com. 2 августа 2000 г. (13 ноября 2008 г.) https://auto.howstuffworks.com/дифференциал.htm
- Риволи, Кашин Вика. «Эрликон Грациано Драйв Системс». Апрель 2007 г.
- «Перекрестный привод Saab XWD». Таможня Зер.20 ноября 2007 г. (13 ноября 2008 г.) http://www.zercustoms.com/news/Saab-XWD-Cross-Wheel-Drive.html
- «Мировая премьера Turbo X на автосалоне во Франкфурте: Saab раскрывает Черный турбо 21 века».
 Сааб США. 11 сентября 2007 г. (12 ноября 2008 г.) http://www.saabusa.com/saabjsp/about/pr_070911.jsp
Сааб США. 11 сентября 2007 г. (12 ноября 2008 г.) http://www.saabusa.com/saabjsp/about/pr_070911.jsp
 Сааб США. 11 сентября 2007 г. (12 ноября 2008 г.) http://www.saabusa.com/saabjsp/about/pr_070911.jsp
Сааб США. 11 сентября 2007 г. (12 ноября 2008 г.) http://www.saabusa.com/saabjsp/about/pr_070911.jspЭлектронный дифференциал в электромобилях
Электронный дифференциал в электромобиляхInternational Journal of Scientific & Инженерные исследования, том 4, выпуск 11, ноябрь 2013 г. 1322
ISSN 2229-5518
Akshay aggarwal
для каждого колеса, чтобы все колеса получали необходимый им крутящий момент.Предлагаемая структура управления основана на управлении PID
для каждого двигателя колеса. Затем система ПИД-управления оценивается в среде Matlab/Simulink. Электронный дифференциал
имеет то преимущество, что он заменяет слабую, тяжелую и неэффективную механическую трансмиссию и механический дифференциал
более эффективными, легкими и небольшими электродвигателями, непосредственно соединенными с колесами с помощью одного редуктора или двигателя в колесе.
—————————— ——————————
Тяжелый кузов, включая структуру и материалы, используемые в электромобилях, всегда интересовал дизайнеров. Их непрерывная исследовательская работа по снижению веса тела заинтересовала многих людей во всем мире. Главной привлекательностью всегда было снижение массы кузова, включая оптимизацию структуры и формы или использование алюминиевых материалов. В автомобилях произошли улучшения как в конструкции двигателя, так и в технологии управления. Современные конфигурации
Их непрерывная исследовательская работа по снижению веса тела заинтересовала многих людей во всем мире. Главной привлекательностью всегда было снижение массы кузова, включая оптимизацию структуры и формы или использование алюминиевых материалов. В автомобилях произошли улучшения как в конструкции двигателя, так и в технологии управления. Современные конфигурации
включают моторизованные колеса, в которых двигатели устанавливаются на колеса электромобилей и, таким образом, улучшают качество воздуха, снижая
зависимость силовых транспортных средств от ископаемого топлива.
Здесь мы размышляем об использовании электронного дифференциала
(ED), заменяющего обычную коробку передач и обычную конфигурацию электромобилей
только с одним тяговым двигателем, приводящим в движение два колеса. Он снижает общую массу электромобиля за счет замены обычного механического дифференциала. Теперь вычислением опорной скорости в электромобиле с двойным приводом можно управлять с помощью ED через кривую крутящий момент/скорость вращения электродвигателя, которая почти идеально адаптирована к кривой сопротивления-крутящего момента/скорости электромобиля. В случае криволинейной
В случае криволинейной
траектории или смены полосы движения каждое колесо управляется
через ЭД для удовлетворения требований движения.
Механическая нагрузка транспортного средства характеризуется многими крутящими моментами, которые считаются резистивными. К
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 момент инерции определяется
следующим соотношением:
Fres = froll + faero + fslope
Froll = µ.mg
Faero = 1/2pCxSv2
Fslope =Mg.sinα
Основное назначение электронного дифференциала (ЭД) — заменить механический дифференциал в многоприводных системах, обеспечивая требуемый крутящий момент для каждого ведущего колеса и позволяя скорости.
𝑑𝑤. 𝑡𝑎𝑛Δ
Δ𝑤 = 𝑤𝑟𝐿 — 𝑤𝑟𝑅 = 𝑤𝑉
𝐿𝑤
δ> 0 ⇒ 𝑇𝑢𝑟𝑛 𝑅𝑖𝑔ℎ𝑡
δ = 0 ⇒ ⇒ 𝑆𝑡𝑟𝑎𝑖𝑔ℎ𝑡 𝑎ℎ𝑒𝑎𝑑
δ <0 ⇒ 𝑇𝑢𝑟𝑛 𝑙𝑒𝑓𝑡
Пропорционально-интегральный контроллер (PID-контроллер) — это семейство контроллеры. Они являются предпочтительным решением, когда контроллер необходим для замыкания контура и дает разработчику большее количество вариантов, и эти варианты означают, что есть больше возможностей для изменения динамики системы таким образом, чтобы помочь разработчику. ПИД-регулятор вычисляет значение «ошибки» как разницу между измеренной переменной процесса и желаемой уставкой. Контроллер пытается минимизировать ошибку, регулируя входы управления процессом. Он принимает значения энкодера в качестве обратной связи и будет проверять их снова и снова в замкнутом контуре, чтобы уменьшить ошибку.
Они являются предпочтительным решением, когда контроллер необходим для замыкания контура и дает разработчику большее количество вариантов, и эти варианты означают, что есть больше возможностей для изменения динамики системы таким образом, чтобы помочь разработчику. ПИД-регулятор вычисляет значение «ошибки» как разницу между измеренной переменной процесса и желаемой уставкой. Контроллер пытается минимизировать ошибку, регулируя входы управления процессом. Он принимает значения энкодера в качестве обратной связи и будет проверять их снова и снова в замкнутом контуре, чтобы уменьшить ошибку.
𝑣𝐿 = 𝑤𝑉 �𝑅 +
𝑑𝑤
�
2
�
2
𝑣𝑅 = 𝑤𝑉 �𝑅
𝑑𝑤
�
2
𝑅 =
2
𝑅 =
𝐿𝑤
𝑡𝑎𝑛Δ
PID-контроллеры можно рассматривать как три термина — пропорциональный Термин, который обеспечивает общий контроль
𝑤𝑟𝐿 =
𝑤𝑟𝑅 =
𝐿𝑤 +
𝐿𝑤 +
𝐿𝑤 — 𝑑𝑤 𝑡𝑎𝑛Δ
𝐿𝑤 — 𝑑𝑤 𝑡𝑎𝑛Δ
𝐿𝑤
𝑤𝑉 𝑡𝑎𝑛Δ
𝐿𝑤
𝑤𝑉
𝑤𝑉
Действие, пропорционально сигналу ошибки через коэффициент усиления всех
, и интегральный термин , уменьшение стационарных ошибок
за счет низкочастотной компенсации с помощью интегратора
и производной составляющей, улучшение переходной характеристики
за счет высокочастотной компенсации с помощью
IJSER © 2013 http://www. ijser.org
ijser.org
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г. ПИД-регуляторы также известны как трехчленные регуляторы и трехрежимные регуляторы.
В этом случае используются два двигателя постоянного тока. Электронный блок управления
выполняет следующие основные задачи:
1. Считывает откалиброванное напряжение
потенциометра угла поворота рулевого колеса и на его основе вычисляет угол поворота рулевого колеса
, а также определяет, движется ли автомобиль прямо, поворачивает ли он влево или вправо.
2 .Считывает напряжение потенциометра дроссельной заслонки, чтобы определить требуемую скорость автомобиля.
3. На основе приведенной выше информации соотношение двух скоростей
VL/VR рассчитывается с использованием соответствующего уравнения, такого как уравнение, показанное ранее
4. Затем к каждой из двух подается отдельный сигнал с широтно-импульсной модуляцией (ШИМ). двигателей в соответствии с требуемым передаточным отношением.
Вышеупомянутая последовательность повторяется с чрезвычайно высокой скоростью, так что ECU продолжает выполнять регулировки на постоянной основе.
Шина CAN (локальная сеть контроллеров) является стандартной шиной автомобиля.Он связывается с микроконтроллерами и устройствами в автомобиле без главного компьютера. Шина CAN представляет собой протокол на основе сообщений, разработанный специально для автомобильных приложений
. CAN — это стандарт широковещательной последовательной шины
с несколькими ведущими устройствами для подключения электронных блоков управления
(ECU).
Здесь мы используем встроенные контроллеры Atmel семейства
со встроенной банкой. Контроллер CAN поможет нам обмениваться данными внутри автомобиля со скоростью до 1 Мбит/с без какого-либо хост-компьютера, получать данные с датчиков на очень высокой скорости в последовательной связи.Контроллер банки разработан в Matlab.
IJSER © 2013 http://www.ijser.org
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г. 1,7 вольт.
1,7 вольт.
При повороте рулевого колеса влево
При повороте рулевого колеса вправо
В этой статье ПИД-регулятор использовался для электронного дифференциала для управления электромобилем с двумя независимыми приводами.Электронный дифференциал обсуждался по сравнению с механическим дифференциалом, что доказывало, что это лучшее устройство с лучшими реализованными в нем функциями. Результаты работы электронной дифференциальной системы удовлетворительны, и двухколесный электромобиль с индивидуальным приводом может плавно двигаться как по прямой, так и по криволинейной траектории с использованием системы ПИД-регулирования с обратной связью.
1 . Kada HARTANI, Mohamed BOURAHLA, Yahia MILOUD, Mohamed SEKOUR «Электронный дифференциал с прямым нечетким управлением крутящим моментом для силовой установки автомобиля», Vol.17, No.1, 2009©TUBITAK doi:10.3906/elk-0801-
2. П. Пресаж, Р. Кришнан. «Моделирование, симуляция и анализ приводов двигателей с постоянными магнитами, Часть I: Синхронный привод двигателей с постоянными магнитами», IEEE Transactions on Industry Applications, том 25, № 2, 265-273, 1989 г.
3.K.H. Наг, Г. Чанг, Ю. Л.: Анализ, проектирование и технология системы ПИД-регулирования, IEEE Transaction on Control System Technology, Vol. 13, № 4, июль 2005 г., стр. 559 – 576
4. Милликен, Ф.В.; Милликен, Д.Л.: «Rave Car Vehicle
Dynamics», SAE International, 1995.
IJSER © 2013 http://www.ijser.org
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г. Кольер и др., «Сравнение геометрии рулевого управления
для многоколесных транспортных средств с помощью моделирования и симуляции
», в материалах
IEEE CDC’98, vol. 3, pp. 3131-3133, December
1998.
6. A. Ece Hartavi et al. , «Сигнальный интерфейс для электроники гибридных электромобилей и исследование реализации», в Proceedings of the IEEE ICVES’08 , Колумбус, Огайо (США), стр.151-
156, сентябрь 2008 г.
IJSER © 2013 http://www.ijser.org
%PDF-1.4
%
1 0 объект
>поток
2017-02-03T10:38:58-05:00Microsoft® Word 20132022-01-23T06:27:29-08:002022-01-23T06:27:29-08:00iText 4. 2.0 от 1T3XTapplication/pdfuuid:dbad9603- cf76-4752-98ca-f3fda2336615uuid: 2ca06c46-817a-40ba-9b81-11f8b2c4b9b2uuid: dbad9603-cf76-4752-98ca-f3fda2336615
2.0 от 1T3XTapplication/pdfuuid:dbad9603- cf76-4752-98ca-f3fda2336615uuid: 2ca06c46-817a-40ba-9b81-11f8b2c4b9b2uuid: dbad9603-cf76-4752-98ca-f3fda2336615
SB4,8]?Xkt=u?M :9ExȝaYwyntmk?}. b|C3RwE}F4RH8#’&:sjH-3o9U_(tA lw
b|C3RwE}F4RH8#’&:sjH-3o9U_(tA lw
VPP’10
%PDF-1.4 % 1 0 объект > эндообъект 9 0 объект /Заголовок /Предмет /Автор /Режиссер /Ключевые слова /CreationDate (D:20220113234016-00’00’) /ModDate (D:20100828102653+02’00’) >> эндообъект 2 0 объект > эндообъект 3 0 объект > эндообъект 4 0 объект > эндообъект 5 0 объект > эндообъект 6 0 объект > эндообъект 7 0 объект > ручей Acrobat Distiller 7.0.5 (Windows)PScript5.dll Версия 5.2.22010-08-28T10:26:53+02:002010-07-01T07:19:43+02:002010-08-28T10:26:53+02: 00заявка/pdf
 O/_K%|?’bH@֔F 풪oj-LcYYHp$|tNda7WͰxVW}~kHFG!Fp# i nE鈷UGY��N>8TzJI #-6X»k9\NE YdeHpuF͡o9X»tOp9A9-LfA
]pO’21’.»mਏɠ
O/_K%|?’bH@֔F 풪oj-LcYYHp$|tNda7WͰxVW}~kHFG!Fp# i nE鈷UGY��N>8TzJI #-6X»k9\NE YdeHpuF͡o9X»tOp9A9-LfA
]pO’21’.»mਏɠАдаптивное электронное дифференциальное управление транспортным средством по балансу крутящего момента
Принцип электронного дифференциального рулевого управления
Дифференциал относится к тому, что внутренние и боковые колеса транспортного средства должны учитывать разницу скоростей для обеспечения устойчивости поворот транспортного средства и избегать вращения и сопротивления колес из-за ситуации поворота или неровности дороги во время движения [12, 13].Когда транспортное средство управляется, колеса с обеих сторон находятся на дуге. И путь движения внешнего колеса больше внутреннего [14, 15]. Следовательно, скорость внешнего колеса должна быть больше скорости внутреннего колеса одновременно. На основе принципа электронного дифференциала и применения мотор-колеса в управлении возможна конструкция электронной дифференциальной системы со вспомогательной функцией рулевого управления. Поскольку ступичный двигатель может управляться отдельно, в отличие от традиционной механической дифференциальной системы, электронной дифференциальной системе не нужны обычные детали, такие как сцепление, трансмиссия, тормоз и механический дифференциал.Поскольку привод двух ведомых колес является независимым, электрическому колесному транспортному средству не хватает ограничений традиционной дифференциальной системы транспортного средства. Если электронный дифференциал разработан на основе стратегии управления скоростью, необходимо наложить ограничение трансмиссии на два независимых ведущих колеса [16, 17]. Ожидание равно n 1 = f ( n 2 ), что означает, что нестабильность проскальзывания колес исключена, это ограничение согласовано с ограничением дороги.Однако этот метод управления трудно избежать и решить сложные и изменчивые проблемы нелинейности в системе транспортного средства и дорожных ограничений, а также трудно добиться точного совпадения двух ограничений.
Поскольку ступичный двигатель может управляться отдельно, в отличие от традиционной механической дифференциальной системы, электронной дифференциальной системе не нужны обычные детали, такие как сцепление, трансмиссия, тормоз и механический дифференциал.Поскольку привод двух ведомых колес является независимым, электрическому колесному транспортному средству не хватает ограничений традиционной дифференциальной системы транспортного средства. Если электронный дифференциал разработан на основе стратегии управления скоростью, необходимо наложить ограничение трансмиссии на два независимых ведущих колеса [16, 17]. Ожидание равно n 1 = f ( n 2 ), что означает, что нестабильность проскальзывания колес исключена, это ограничение согласовано с ограничением дороги.Однако этот метод управления трудно избежать и решить сложные и изменчивые проблемы нелинейности в системе транспортного средства и дорожных ограничений, а также трудно добиться точного совпадения двух ограничений. Следовательно, необходимо обсудить рациональность и точность стратегии управления. Обычно метод электрического дифференциального управления основан на контроле крутящего момента и скорости проскальзывания, что требует большего внимания как к стабильности, так и к управляемости.
Следовательно, необходимо обсудить рациональность и точность стратегии управления. Обычно метод электрического дифференциального управления основан на контроле крутящего момента и скорости проскальзывания, что требует большего внимания как к стабильности, так и к управляемости.
Анализ кинематики и динамики управления колесным электромобилем
В этом разделе анализируется кинематика и динамика процесса управления автомобилем.С помощью ряда формул анализируется силовая ситуация рулевого и ведущего колес. В сочетании с принципом электронного дифференциального рулевого управления теоретически объясняется необходимость электронного дифференциального управления в процессе рулевого управления транспортным средством и вспомогательное влияние на рулевое управление.
При прямолинейном движении автомобиля по дороге с постоянной скоростью рулевое колесо перемещается параллельно направлению движения автомобиля под действием продольной горизонтальной тяги E n . В это время тяги E E N N рулевого колеса сбалансированы с сопротивлением прокатки E NF шина, то есть E N = E нф . Когда транспортное средство направлено, продольная горизонтальная тяга E N , рулевого колеса можно разложить в E x 0280 угол поворота руля δ руля.Сила e x y генерирует сопротивление дороги E y , вдоль направления y − y .
В это время тяги E E N N рулевого колеса сбалансированы с сопротивлением прокатки E NF шина, то есть E N = E нф . Когда транспортное средство направлено, продольная горизонтальная тяга E N , рулевого колеса можно разложить в E x 0280 угол поворота руля δ руля.Сила e x y генерирует сопротивление дороги E y , вдоль направления y − y .
В рулевом управлении следующие условия должны быть выполнены: сила E x 9022 чем сила сцепления между дорожным покрытием и шиной в направлении y − y , что должно обеспечить отсутствие бокового скольжения в направлении y − y и только качение в направлении xx −158 направление. Вообще говоря, сила сцепления в направлении y − y намного больше, чем сопротивление качению E nf , . Следовательно, бокового скольжения в направлении y − y нет. При постоянном движении рулевого колеса в направлении x − x сила E x уравновешивается сопротивлением качению E
Вообще говоря, сила сцепления в направлении y − y намного больше, чем сопротивление качению E nf , . Следовательно, бокового скольжения в направлении y − y нет. При постоянном движении рулевого колеса в направлении x − x сила E x уравновешивается сопротивлением качению E
7,27 nf 2 2 2 2 2 2 2 2{,}=\frac{E_x}{\cos \delta }=\frac{E_n}{\cos \delta } $$
(1)
, где δ — угол поворота руля, а E n < E n 3, , . Требуется больше продольной горизонтальной тяги E n , , чем горизонтальной тяги E n перед рулевым управлением, чтобы рулевое колесо сохраняло устойчивое качение по 900 рулям. x − x направление. Чем больше угол отклонения руля, тем больше необходимая продольная горизонтальная тяга.
Чем больше угол отклонения руля, тем больше необходимая продольная горизонтальная тяга.
Анализ силы по скорости вращения каждого ведущего колеса
В процессе управления транспортным средством состояние движения каждой точки кузова может быть синтезировано линейным движением и вращательным движением. За счет трения между колесом и землей в процессе рулевого управления присутствуют момент сопротивления повороту Н мкф рулевого колеса и момент сопротивления повороту М мкф ведущего колеса , а также пройти через шины к транспортному средству.
В процессе рулевого управления на вертикальные плоскости рулевого и ведущего колес действует сила E fy и E dy соответственно. В предположении, что движущая сила E D не может уравновесить момент сопротивления рулению, формируется крутящий момент руля и формируется его равновесие, которое выражается уравнением 2. {\prime} \cdot {E}_{ff}\frac{R}{\cos \alpha } $$
{\prime} \cdot {E}_{ff}\frac{R}{\cos \alpha } $$
(5)
Уравнение 5 можно упростить как уравнение.{\prime} \) рулевого колеса и сопротивление качению E fd ведущего колеса имеют движущую силу E D , которая определяется как уравнение. 7.
$$ {E}_D={E}_{fd}+{E}_{ff} $$
(7)
По сравнению с уравнениями. 6 и 7, известно, что движущая сила ведущего колеса должна быть увеличена, чтобы преодолеть момент сопротивления рулевому управлению и привести рулевое колесо в движение вперед, когда транспортное средство движется от прямой линии к рулевому управлению.
Подавление аномальных помех электронного дифференциала
Во-первых, модель управления напряжением электронной дифференциальной системы используется для устранения аномальных скачков помех электронного дифференциала. Рассчитаны оптимальные параметры комбинации электронного дифференциального управления. Этапы операции следующие.
Этапы операции следующие.
Предположим, что параметр, который может описать ненормальную ошибку скачка электронного дифференциала, равен H , ошибка сигнала ненормального скачка электронного дифференциала, управляемая с помощью этого параметра, равна i ( t ), скорость ненормального скачка электронного дифференциала равна Hx и выражение ix ( t ), переменный коэффициент управления электронным дифференциалом K .Тогда модель управления электронным дифференциалом выражается в уравнениях. 8 и 9,
, где Kix ( t ) — коэффициент электронного дифференциала. При условии аномального скачка электронного дифференциала выражение скорости управления электронным дифференциальным сигналом рассчитывается по формуле 10.
$$ Q=\beta H+\left(1-\beta \right) Hx $$
(10)
, где β — коэффициент амплитуды аномального скачка электронного дифференциала, который в нормальных условиях равен 1. Чтобы уменьшить вычислительную сложность, уравнение. 10 можно преобразовать как уравнение. 11.
Чтобы уменьшить вычислительную сложность, уравнение. 10 можно преобразовать как уравнение. 11.
$$ \beta ={\beta}_o+{K}_{\beta}\left|H\right|\left|H\right|\max $$
(11)
, где β o – коэффициент регулировки аномального скачка электронного дифференциала в случае | Н | = 0. Когда 0 ≤ β ≤ 0,5 и 0 ≤ β ≤ 1, K β — постоянная и 0 ≤ к β ≤ (1 — β или ).
В ур. 11. За исключением электронного дифференциального скачка, можно эффективно рассчитать ошибку управления электронным дифференциальным скачком. Соотношение ошибок управления и и и неустойчиво при электронном дифференциальном скачке.
Большое количество процессов сбора данных электронного дифференциального управления определяется их типами данных в качестве отправной точки. Когда система фиксирует модуль оценки в соответствии с различными суффиксами идентификатора файла, модуль обработки данных системы инициирует протокол защиты от несанкционированного доступа к передаваемому сообщению, чтобы значительно улучшить безопасное время работы данных после завершения большого количества типов данных электронного дифференциального управления. Когда время защиты данных достигает требований к работе системы, модуль оценки определяет конкретный метод сбора каждых данных в соответствии с типом протокола защиты пакета данных сети транспортного средства. Если протокол защиты от несанкционированного доступа к сообщениям автомобильной сети, защищенный сетевым протоколом TCP / IP, может удовлетворить большое количество процессов сбора базы данных электронного дифференциального управления, тогда система сама устранит дыру в безопасности, вызванную данными.Основная причина, по которой система работает безопасно и может быть значительно улучшена. Конкретный большой объем процесса сбора данных электронного дифференциального управления показан на рис. 1.
Когда время защиты данных достигает требований к работе системы, модуль оценки определяет конкретный метод сбора каждых данных в соответствии с типом протокола защиты пакета данных сети транспортного средства. Если протокол защиты от несанкционированного доступа к сообщениям автомобильной сети, защищенный сетевым протоколом TCP / IP, может удовлетворить большое количество процессов сбора базы данных электронного дифференциального управления, тогда система сама устранит дыру в безопасности, вызванную данными.Основная причина, по которой система работает безопасно и может быть значительно улучшена. Конкретный большой объем процесса сбора данных электронного дифференциального управления показан на рис. 1.
Блок-схема сбора данных для транспортного средства
В соответствии с полученными данными электронного дифференциального управления, параметры электронного дифференциального управления скачком Δk q , Δk l и Δk f . {\prime},\varDelta{k}_q,\varDelta{k}_l,\varDelta{k}_f=\left\{ -5,-4,-3,-2,-1,0,1,2,3,4,5\вправо\} $$
{\prime},\varDelta{k}_q,\varDelta{k}_l,\varDelta{k}_f=\left\{ -5,-4,-3,-2,-1,0,1,2,3,4,5\вправо\} $$
(12)
Нечеткое подмножество этих электронных дифференциальных изменений параметров управления аномальными скачками задается уравнением.{\prime},\varDelta{k}_q,\varDelta{k}_l,\varDelta{k}_f=\left\{ NB, NM, NS, O, PS, PM, PB\right\} $$
(13)
Согласно уравнению. 13, электронная дифференциальная нечеткая стандартная таблица измененных Δk q , Δk l и Δk 9 f 86 9. I ‘ ‘ , IX ‘, ΔK Q , ΔK L и ΔK F 3 Обеспечивают нормальное распределение.Чтобы устранить влияние этих изменений, необходимо подтвердить аномальный скачок электронного дифференциала. Правило управления электронным дифференциалом устанавливается путем разработки принадлежности нечеткой переменной электронного дифференциала в среде IoT. {\prime}\right\}\ конец {массив}\справа.$$
{\prime}\right\}\ конец {массив}\справа.$$
(14)
Вариационное правило электронного дифференциального управления I ‘, ‘ , IX ‘, ΔK Q , ΔK L 3 и ΔK F можно получить, проанализировав аномальный скачок электронного дифференциала. Затем корреляционное управление этими параметрами управления электронным дифференциалом оптимизируется для устранения аномальных скачкообразных помех электронного дифференциала.
Чтобы количественно оценить влияние параметров электронного дифференциального управления в среде IoT, необходимо количественно определить корреляцию между параметрами электронного дифференциального управления, которая выражается в виде уравнения. 15,
$$ J=\left\{\begin{array}{l}t\\ {}0\end{array}\right.t\left|i(t)\right| dt=\мин $$
(15)
, где J — результаты квантования точности управляющего сигнала, которые получены через время отклика электронного дифференциального управляющего сигнала, процесс управления и отношение электронного разностного сигнала к шуму. Для достижения электронных дифференциальных энергосбережения, параметры электронного дифференциального управления I ‘, IX ‘ , Δk Q , ΔK L 3 и Δk f необходимы для оптимизации. В соответствии с оптимальным правилом устранения аномальных скачкообразных помех электронного дифференциала в среде IoT оптимальные параметры управления электронным дифференциалом устанавливаются и настраиваются для получения наилучшего значения параметров энергосбережения.Оптимальное сочетание параметров электронного дифференциального управления определяется формулой. 16.
Для достижения электронных дифференциальных энергосбережения, параметры электронного дифференциального управления I ‘, IX ‘ , Δk Q , ΔK L 3 и Δk f необходимы для оптимизации. В соответствии с оптимальным правилом устранения аномальных скачкообразных помех электронного дифференциала в среде IoT оптимальные параметры управления электронным дифференциалом устанавливаются и настраиваются для получения наилучшего значения параметров энергосбережения.Оптимальное сочетание параметров электронного дифференциального управления определяется формулой. 16.
$$ \left\{\begin{array}{l}0\le {\beta}_o\le 0,5\\ {}0\le {K}_{\beta}\le \left(1 -{\beta}_o\right)\end{массив}\right. $$
(16)
Электронное управление дифференциалом с адаптивным балансом крутящего момента для колесного электромобиля
Согласно оптимальному сочетанию параметров электронного управления дифференциалом, электронное управление дифференциалом с адаптивным балансом крутящего момента электромобиля с колесным приводом реализуется с использованием нечеткого управления активная мощность и реактивная мощность электронного дифференциала.
Сопротивление R и реактивное сопротивление X электронной дифференциальной линии контролируются и задаются по уравнению 17.
$$ R+ jX=Z\frac{N_{CT}}{N_{PT}} $$
(17)
, где Z — эквивалентное полное сопротивление контроллера относительно центра электронной дифференциальной нагрузки, N CT — коэффициент изменения в контроллере, N PT — коэффициент изменения электронного .
Исходя из того, что аппаратура электронной регулировки дифференциала не используется, выполняется расчет потока мощности при максимальной нагрузке электронного дифференциала и эквивалентного значения импеданса выхода нечеткого регулятора на электронный дифференциал PCC получается в среде IoT, который выражается в виде уравнения. 18.
$$ Z=\frac{V_{регулятор}-{V}_{нагрузка}}{F_{линия}} $$
(18)
где В регулятор — вектор электронного дифференциала выхода регулятора, В нагрузка — вектор регулятора в центре электронной дифференциальной нагрузки, F — вектор выхода контроллера.
Затем эквивалентный импеданс между выходом контроллера и электронной дифференциальной шиной рассчитывается и выражается в виде уравнения. 19.
$$ Z=\frac{V_1-{V}_3}{F_1}=\frac{F_1{Z}_1+{F}_2{Z}_2}{F_1}={Z}_1+\frac{ F_2{Z}_2}{F_1} $$
(19)
, где цифра 3 представляет электронный дифференциальный центр нагрузки, В — электронное значение выхода контроллера, В 3 — дифференциал электронного дифференциального центра нагрузки, а F 1 — электронный дифференциал выхода регулятора.
Согласно уравнению. 19 анализ проводится для следующих 3 случаев.
- (1)
Если система под контроллером не подключена к электронной распределенной мощности DG , направление потока мощности контроллера от контроллера к электронному дифференциальному центру нагрузки. Согласно уравнению 19 видно, что изменение электронной дифференциальной нагрузки влияет на изменение F 2 / F 1 .
При изменении нагрузки электронного дифференциала меняется и эквивалентное сопротивление Z 13 контроллера. - (2)
(2) Если электронная дифференциальная шина 2 подключена к электронной распределенной мощности DG , когда электронная распределенная мощность DG имеет высокую проницаемость, возможно, что DG на электронной дифференциальной шине 2 может подавать питание подача в вышестоящую электросеть в то же время, когда удовлетворяется нагрузка ниже по потоку электронного дифференциала. F 1 и F 2 почти наоборот. Это приводит к тому, что эквивалентный импеданс реального контроллера намного меньше, чем эквивалентный импеданс электронной дифференциальной максимальной нагрузки, что приводит к отказу схемы электронной компенсации.
- (3)
Если электронная дифференциальная шина 1 подключена к электронной распределенной мощности DG , когда электронная распределенная мощность DG имеет высокую проницаемость, электронная дифференциальная шина 2 может стать точкой питания фидера контроллера.
F 1 и F 2 почти наоборот. Как и в случае 2, эффективность управления электронной компенсационной схемой также недействительна.
 При изменении нагрузки электронного дифференциала меняется и эквивалентное сопротивление Z 13 контроллера.
При изменении нагрузки электронного дифференциала меняется и эквивалентное сопротивление Z 13 контроллера. F 1 и F 2 почти наоборот. Как и в случае 2, эффективность управления электронной компенсационной схемой также недействительна.
F 1 и F 2 почти наоборот. Как и в случае 2, эффективность управления электронной компенсационной схемой также недействительна.Из приведенных выше 3 случаев, когда электронный дифференциальный источник питания DG с высокой проницаемостью, подключенный к электронной распределительной сети под нечетким контроллером, вызывает обратный поток мощности в среде IoT, контроллер может управлять амплитудой напряжения электронного дифференциальный центр нагрузки точно.Достигнута цель электронного управления дифференциалом адаптивного баланса крутящего момента автомобиля с электроприводом.
Tech Talk — Что такое дифференциалы? • Скручивание автомобилей
1,6 тыс. просмотров
Когда мы думаем об основных элементах трансмиссии автомобиля, двигатель, коробка передач и ведущие колеса являются нашими первыми и часто единственными мыслями как критическими элементами, отвечающими за вождение. Но есть меньшая мысль об устройстве, которое играет большую, большую роль — дифференциал.Дифференциал играет большую роль не только во всем процессе трансмиссии, но и в управлении транспортным средством. В конце концов, сила — ничто, если вы не можете ее использовать.
Но есть меньшая мысль об устройстве, которое играет большую, большую роль — дифференциал.Дифференциал играет большую роль не только во всем процессе трансмиссии, но и в управлении транспортным средством. В конце концов, сила — ничто, если вы не можете ее использовать.
Но что такое дифференциал? Как это работает? Какую пользу он приносит автомобилю, и есть ли недостатки? Читать дальше…
Что такое дифференциал и для чего он нужен?
Дифференциал представляет собой узел, состоящий из нескольких различных типов шестерен, который находится между коробкой передач и приводными валами ведущих колес.Его физическое положение обычно находится на оси ведущих колес — по крайней мере, в самой базовой конфигурации — по сути, разделяя ведущую ось на две части. Он имеет три ключевые функции:
- Направляет крутящий момент на ведущие колеса, часто преобразовывая крутящий момент под углом 90°
- Он действует как редуктор последней передачи, регулируя скорость вращения в последний раз, прежде чем вращение достигнет ведущих колес.
- Однако третья и основная функция дифференциала, от которой он и получил свое название, заключается в том, что он позволяет двум ведущим колесам на одной оси вращаться с разными скоростями.

Эта последняя функция чрезвычайно важна для работы транспортного средства и управления им. При движении по прямой колеса, левое и правое, проходят одинаковое расстояние и вращаются с одинаковой скоростью. Однако при повороте автомобиля внутреннее и внешнее колеса проходят разные расстояния.
Рассмотрим пример диаграммы ниже:
Если колеса транспортного средства находятся на расстоянии 1,5 метра друг от друга (от центра до центра каждой шины), и транспортное средство движется по полному кругу постоянного радиуса – в этом примере 1.5 метров на внутреннем колесе – внешнее колесо движется по окружности радиусом 3,0 метра. Окружность двух пройденных кругов — общее расстояние путей внутреннего и внешнего колес — можно рассчитать по математической формуле: Окружность = 2 x π x радиус
.
Расстояние, пройденное внутренним колесом, составляет 9,4 метра, а внутреннее колесо проходит 18,8 метра. Внешнему колесу необходимо преодолеть большее расстояние — в данном случае удвоенное расстояние — за то же время, которое требуется внутреннему колесу, чтобы преодолеть более короткое расстояние.Для этого внешнее колесо должно вращаться быстрее, чем внутреннее. Вот где дифференциал вступает в игру.
Как работает дифференциал?
Стандартный дифференциал, часто называемый открытым дифференциалом , является наиболее простым и распространенным типом дифференциала. Он состоит из четырех основных компонентов:
- Шестерня на первичном валу
- Зубчатый венец
- Паук/шестерни
- Боковые шестерни, соединенные с валами ведущих колес
Шестерня входит в зацепление с зубчатым венцом, преобразуя крутящий момент под углом 90° в направление мощности на ведомые колеса. Крестовина крепится к зубчатому венцу и вращается вместе с ним, в свою очередь вращая боковые шестерни и ведомые колеса. На прямой крестовина находится в фиксированном положении и оба колеса вращаются с одинаковой скоростью. Однако при повороте крестовина может вращаться вокруг своей оси — процесс, при котором одна боковая шестерня вращается быстрее, а другая замедляется. Это позволяет колесам вращаться независимо друг от друга, и каждая сторона транспортного средства движется с разной скоростью. По сути, это простейшая форма векторизации крутящего момента — тема, которую мы вскоре обсудим в другом выпуске Tech Talk.
Крестовина крепится к зубчатому венцу и вращается вместе с ним, в свою очередь вращая боковые шестерни и ведомые колеса. На прямой крестовина находится в фиксированном положении и оба колеса вращаются с одинаковой скоростью. Однако при повороте крестовина может вращаться вокруг своей оси — процесс, при котором одна боковая шестерня вращается быстрее, а другая замедляется. Это позволяет колесам вращаться независимо друг от друга, и каждая сторона транспортного средства движется с разной скоростью. По сути, это простейшая форма векторизации крутящего момента — тема, которую мы вскоре обсудим в другом выпуске Tech Talk.
В видео ниже просто показаны основы дифференциала:
Но у открытого дифференциала, самого простого по конструкции, есть несколько недостатков.
Недостатки открытого дифференциала…
Основной принцип открытого дифференциала отдает предпочтение колесу с наименьшим сопротивлением, позволяя ему вращаться быстрее. В принципе, это звучит хорошо — и в идеальном мире, в пределах повседневного использования, это было бы хорошо — вот почему многие пригородные автомобили используют открытые дифференциалы.Но в сценариях, когда одному колесу не хватает сцепления с поверхностью, это может стать проблемой.
Если одно колесо начнет проскальзывать – из-за дождя, льда или даже рыхлого песка – открытый дифференциал позволит проскальзывающему колесу свободно вращаться, а другое колесо вообще лишит привода. Такая же ситуация может возникнуть при прохождении поворотов на высокой скорости, когда отдельные колеса могут потерять сцепление с дорогой из-за дорожного покрытия или дроссельной заслонки. В таких ситуациях управление и даже поступательный импульс затруднены, а реакции на управление не такие острые и прямые, как необходимо.
Однако существуют разные типы различий, некоторые из которых созданы для решения этой проблемы. Они известны как дифференциалы повышенного трения и являются лишь одним из многочисленных типов дифференциалов.
Какие еще типы дифференциалов существуют?
Дифференциал повышенного трения (LSD) — это наиболее распространенный альтернативный тип дифференциала, который часто используется в высокопроизводительных автомобилях для улучшения управляемости и общего уровня сцепления с дорогой.В группе LSD есть два основных подраздела:
- Механический LSD – Механические LSD используют подпружиненную систему на выходных валах, которая реагирует на центростремительную силу (силу, действующую по прямой линии от центра вращения). Они допускают проскальзывание и разные скорости колес до определенного момента, но когда скорость одного колеса сильно отличается от скорости другого, включается система пружин, частично или полностью блокирующая дифференциал. Эта система накладывает ограничения на принцип наименьшего сопротивления, допуская это только до определенного момента. Механические LSD нашли хорошее применение во многих автомобилях, например, в Renault Megane RS, для улучшения управляемости.
- Электронный LSD — Электронный LSD, или e-diff , использует компьютерные датчики, определяющие скорость вращения колес. Когда обнаруживается, что одно колесо вращается слишком быстро по отношению как к скорости движения (км/ч или миль/ч), так и к скорости другого ведущего колеса, компьютер запускает электронный привод, который либо частично, либо полностью блокирует дифференциал, регулируя индивидуальное колесо. скорость соответственно.Volkswagen Golf GTI особенно использовал электронный дифференциал, начиная с Golf 7 GTI Performance Pack.
 Эта система накладывает ограничения на принцип наименьшего сопротивления, допуская это только до определенного момента. Механические LSD нашли хорошее применение во многих автомобилях, например, в Renault Megane RS, для улучшения управляемости.
Эта система накладывает ограничения на принцип наименьшего сопротивления, допуская это только до определенного момента. Механические LSD нашли хорошее применение во многих автомобилях, например, в Renault Megane RS, для улучшения управляемости.
Блокируемые дифференциалы — еще один распространенный тип дифференциалов, чаще встречающийся на внедорожниках, таких как Jeep Wrangler и Mercedes-Benz G-Class. Это традиционно открытые дифференциалы, но с возможностью блокировки дифференциала для распределения фиксированного крутящего момента на любое колесо. В грязных условиях они обеспечивают постоянный привод каждого колеса, что обеспечивает максимальное сцепление на скользких поверхностях.Блокируемые дифференциалы могут быть как с механическим, так и с электронным управлением.
Это традиционно открытые дифференциалы, но с возможностью блокировки дифференциала для распределения фиксированного крутящего момента на любое колесо. В грязных условиях они обеспечивают постоянный привод каждого колеса, что обеспечивает максимальное сцепление на скользких поверхностях.Блокируемые дифференциалы могут быть как с механическим, так и с электронным управлением.
Mercedes-Benz G-Class оснащен тремя переключателями для блокировки дифференциалов
Межосевые дифференциалы — это тип дифференциала, который традиционно используется как в полноприводных автомобилях, так и в полноприводных (AWD). Там, где дифференциалы традиционно используются для распределения крутящего момента между колесами на одной ведущей оси, центральные дифференциалы позволяют распределять крутящий момент между передней и задней осями.Межосевые дифференциалы обычно встречаются в двух основных вариантах:
- В полноприводных автомобилях центральный дифференциал часто позволяет полностью отключить переднюю или заднюю ось, что снижает расход топлива и общий износ. Неведущая ось может быть повторно включена – как правило, в состоянии покоя – при пересечении пересеченной местности, требующей дополнительных ведущих колес. Это чаще всего встречается в бакки / пикапах и внедорожниках 4 × 4.
 Неведущая ось может быть повторно включена – как правило, в состоянии покоя – при пересечении пересеченной местности, требующей дополнительных ведущих колес. Это чаще всего встречается в бакки / пикапах и внедорожниках 4 × 4.
Неведущая ось может быть повторно включена – как правило, в состоянии покоя – при пересечении пересеченной местности, требующей дополнительных ведущих колес. Это чаще всего встречается в бакки / пикапах и внедорожниках 4 × 4.- Не каждая система полного привода использует межосевой дифференциал.Чаще всего это функция, встречающаяся на автомобилях с высокими характеристиками, которые используют полный привод. Модели Audi RS, такие как RS3, RS4, RS6 и RS7, используют такой дифференциал, а еще одна известная модель — Subaru Impreza WRX STi. В этих типах приложений механический или электронный дифференциал можно использовать различными способами:
Заключение
Хотя базовая концепция дифференциала может быть довольно простой, все многочисленные различные типы дифференциалов были задуманы, чтобы адаптировать базовую конструкцию к текущим потребностям. В то время как все современные автомобили имеют по крайней мере один дифференциал, нередко можно найти высокопроизводительные или внедорожные автомобили с двумя или даже тремя дифференциалами. Хотя все они могут выполнять разные функции, их основная функция остается неизменной — позволять распределять крутящий момент в различной степени либо спереди назад, либо из стороны в сторону.
В то время как все современные автомобили имеют по крайней мере один дифференциал, нередко можно найти высокопроизводительные или внедорожные автомобили с двумя или даже тремя дифференциалами. Хотя все они могут выполнять разные функции, их основная функция остается неизменной — позволять распределять крутящий момент в различной степени либо спереди назад, либо из стороны в сторону.
Обязательно следите за нами в социальных сетях, чтобы не пропустить наш следующий сегмент Tech Talk: Что такое векторизация крутящего момента? Скоро…
Автор Роджер Бирманн
Вам также может понравиться
(PDF) Электронная дифференциальная система для электромобиля с двигателем в колесе
Эта работа поддерживается TUBITAK (Научно-технический
Исследовательский совет Турции) с проектом 113M090.
Электронная дифференциальная система для электромобиля с двигателем в колесе инженера по электротехнике и электронике, Университет Фрат, Турция
merveyildirim@firat. edu.tr, [email protected]
edu.tr, [email protected]
2Школа авионики, Университет Фрат, Турция
[email protected]. т.р.
3Отд. Автомобильной инженерии, Университет Фрат, Турция
Abstract
В данной статье представлено моделирование и симуляция электронной
дифференциальной системы (EDS) для электромобиля (EV) с двумя передними колесами
. Электронный дифференциал
используется в электромобилях из-за некоторых недостатков традиционного
механического дифференциала, таких как
тяжелая и громоздкая система, которая неудобна для электромобилей, а также
механических потерь, вызванных силовыми агрегатами.В этом исследовании
EDS для передних колес электромобиля с двигателем в колесе моделируется вместо редких колес, которые обычно изучались в литературе. Скорости передних колес
оцениваются по уравнениям, полученным из модели Аккермана-Жеанта
с использованием программного пакета Codesys. Затем
Затем
моделирование EDS также реализуется с помощью Matlab/Simulink.
Согласно изменению скорости автомобиля и угла поворота
электромобиля, скорости передних колес, оцененные Codesys,
подтверждены результатами Simulink.Отмечено, что модель
EDS подходит для электромобилей с двигателями в колесах.
Ключевые слова: электромобиль, мотор-колесо, электроника
Дифференциальная система
1. Введение
Расширение транспортного сектора вызывает некоторые проблемы,
увеличение загрязнения окружающей среды и истощение запасов ископаемого
топлива. Таким образом, электромобили используются для устранения выбросов
вредных газов, снижения зависимости от импортируемой странами
нефти за счет экономии топлива и предотвращения загрязнения воздуха
.В последние годы использование электромобилей увеличилось благодаря разработкам в области драйверов и аккумуляторов, использованию эффективных электродвигателей
и безопасному вождению [1, 2].
Масса электромобиля с одним тяговым двигателем, приводящим в движение два колеса
с использованием дифференциала, увеличивается за счет аккумуляторов.
Для уменьшения массы электромобиля и использования трансмиссии, получения
быстрого отклика двигателей и обеспечения независимого управления крутящим моментом
каждого колеса, двигатели вмонтированы в колеса [3,
4 ].
Дифференциальные системы для транспортных средств используются на
скользких и наклонных дорогах для равномерного распределения мощности и крутящего момента на ведущие колеса
. Автомобили с двигателем внутреннего сгорания имеют механический
дифференциал с дифференциальной передачей. Как только колесо
ускоряется в случае неиспользования дифференциальных передач, колеса
проскальзывают из-за торможения, чтобы замедлить другое. Это также вызывает
небезопасное вождение, увеличение расхода топлива и износ шин.
Следовательно, скорость внутреннего колеса должна отличаться от
скорости внешнего колеса для транспортного средства, движущегося по криволинейной
дороге [5]. С другой стороны, для электромобилей EDS используется из-за того, что
С другой стороны, для электромобилей EDS используется из-за того, что
имеет независимые колеса с прямым приводом вместо традиционного дифференциала
. Следовательно, также устраняются некоторые недостатки, такие как механические потери, расходы на техническое обслуживание и ремонт шестерен, вызванные
силовыми агрегатами.
Как показали исследования по ЭДС в литературе, моделирование
и имитация ЭДС для электромобиля с приводом на два двигателя
реализуются с помощью метода нечеткого логического управления, используемого для оценки
скорости проскальзывания каждого колеса в [3]. Разработанная ЭЦП подтверждена результатами
Matlab/Simulink. Азеддин Драу выполняет электронное регулирование дифференциальной скорости
для двухколесного тягача
в [6]. Метод включает в себя прямое управление крутящим моментом для каждого двигателя колеса
, который является синхронным двигателем с постоянными магнитами
(PMSM). Разработанная система моделируется для различных сценариев дорог
Разработанная система моделируется для различных сценариев дорог
, которые представляют собой прямые и изогнутые дороги. Замечено, что
устойчивость транспортного средства обеспечивается хорошо на криволинейной дороге. В
[7] представлена электрическая дифференциальная система для двух независимых задних
колес электромобиля и проведен анализ наблюдателя скорости и крутящего момента
для двигателя постоянного тока. Алгоритм векторизации крутящего момента заднего колеса
на основе модели Аккермана Жантана
разработан для двухдвигательной системы электропривода в [8].Моделирование системы
реализовано в Excel, чтобы показать различные случаи прохождения поворотов
. Авторы в [9] предлагают метод управления скоростью
для дифференциального рулевого управления четырехколесного электромобиля с независимым управлением.
Уравнения даны моделью Аккермана Жантана, основанной на
скорости транспортного средства. Точность спроектированной системы подтверждена
Точность спроектированной системы подтверждена
результатами моделирования и эксперимента. [5] включает модель нейронной сети
, которая используется для анализа на основе скорости транспортного средства
и угла поворота рулевого колеса EDS для EV.Видно
, что разработанная ЭЦП полезна для ЭМ. В другой статье [10]
ЭДС для электромобиля с двумя независимыми задними приводами разработана
с помощью нейросетевого управления, используемого для оценки скорости транспортного средства.
По изменению скорости транспортного средства этим методом получают скорости
задних приводов. Результаты моделирования
подтверждены тестированием двух асинхронных двигателей мощностью 37 кВт. 11Видно, что результаты моделирования
на основе скорости транспортного средства и угла поворота рулевого колеса являются
удовлетворительными. [12] представляет новую архитектуру управления EDS для
тяговой системы в задних электрических тяговых пассажирских гибридных
электромобилях (HEV).