Обороты асинхронного двигателя: От чего зависят обороты однофазного асинхронного двигателя. Способы регулировки оборотов вращения асинхронных двигателей
Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),

- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.

Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:

Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт | U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; | |
| Потребляемая реактивная мощность, квар | ||
| Полезная мощность на валу, кВт | Ƞ — КПД двигателя; | |
| Потребляемый двигателем ток, А | ||
| Вращающий момент двигателя, кГм | nном. – номинальная скорость вращения ротора, об/мин; | |
| Синхронная скорость вращения магнитного поля, об/мин | f1 – частота питающего тока, Гц; р – число пар полюсов машины; | |
| Скольжение двигателя | ||
| Скорость вращения ротора при нагрузке, об/мин | ||
| ЭДС обмоток статора и ротора, В | kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; | |
| Коэффициенты трансформации по напряжению и по току | w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. | |
| Параметры схемы замещения | zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; | |
| Ток холостого хода, А | Iном. – номинальный ток двигателя, А | |
| Критическое скольжение | sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; | |
| Уравнение вращающего момента | Sном. – скольжение при номинальной нагрузке | |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор | ||
| КПД двигателя при введении добавочного сопротивления в ротор | ||
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм | U1ф – фазное напряжение, В | |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателяПоделиться в социальных сетях
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
От чего зависит частота вращения электродвигателя. Регулирование скорости вращения асинхронных электродвигателей
Большинство насосов приводятся в действие с помощью асинхронных электродвигателей, это означает, что двигатели вносят вклад в общую эффективность насосной системы.
Данная статья посвящена исследованию ключевых аспектов эффективности электродвигателя, которые находятся под контролем пользователя. 2/3 всей вырабатываемой электроэнергии, потребляются электродвигателями, которые используются в различном оборудовании на промышленных площадках всего мира.
Электродвигатели развиваются на протяжении последних 150 лет. Не смотря на то, что существует большой выбор из различных конструкций двигателей (например синхронные, асинхронные или постоянного тока), наиболее используемым в промышленности на сегодняшний день является асинхронный электродвигатель переменного тока, т.к. является более надежным. Также асинхронный электродвигатель предпочтительнее при использовании частотного преобразователя. Достаточно высокая эффективность в сочетании с простотой изготовления, высокой надежностью и низкой ценой делает его самым широко-применяемым типом двигателя по всему миру.
Рисунок 1: Асинхронный электродвигатель с короткозамкнутым ротором
На рисунке 1 показана обычная компоновка асинхронного электродвигателя с тремя обмотками статора, которые расположены вокруг сердечника. Обмотка ротора состоит из медных или алюминиевых стержней, торцы которых накоротко замкнуты кольцами. Кольца изолированы от ротора. В подшипниковом узле, как правило, используются шарикоподшипники с консистентной смазкой, за исключением очень больших двигателей. Смазка масляным туманом может значительно увеличить срок службы подшипников. Во всех асинхронных электродвигателях используется трехфазный ток, за исключением самых маленьких промышленных процессов (ниже 2 л.с.). Для запуска фазных двигателей необходимы другие средства, такие как щетки или конденсаторный пуск (использование конденсатора во время пуска).
Проблема эффективности двигателя
При использовании электродвигателя в качестве привода насоса потери энергии и падение давления в результате неэффективности насоса обычно гораздо больше, чем потери энергии связанные с неэффективностью электродвигателя, но они не являются незначительными. Оптимизация эффективности электродвигателя насоса может обеспечить реальную экономию стоимости рабочего цикла на протяжении всего срока службы насоса/электродвигателя. Ключевыми факторами, которые влияют на эффективность асинхронного двигателя являются:
- относительная нагрузка двигателя (негабаритные двигатели находящиеся под нагрузкой)
- скорость вращения (число полюсов)
- размер двигателя (номинальная мощность)
- класс двигателя: обычный КПД в сравнении с энергоэффективностью в с равнении с высоким КПД
Как показано на рисунке 2, эффективность асинхронного электродвигателя изменяется вместе с
относительной нагрузкой на электродвигатель по сравнению с номинальной характеристикой. Вплоть до нагрузки в 50% эффективность большинства электродвигателей остается линейной и для некоторых электродвигателей достигает пика у отметки 75%. Электродвигатели могут работать при нагрузке меньше 50% только в течение короткого промежутка времени и не могут эксплуатироваться при нагрузках меньше 20% от номинальных. Таким образом, когда отрегулированные рабочие колеса или насосы возвращаются к своим кривым «напор-подача», необходимо оценить воздействие относительной нагрузки на электродвигатель.
Рисунок 2: Эффективность электродвигателя для 100-сильных моторов — Обычные кривые характеристик при нормальном диапазоне нагрузок электродвигателя
Скорость вращения
На рисунке 2 также показано влияние скорости вращения на максимально-достижимую эффективность. 4-х полюсный электродвигатель при номинальных 1800 об/мин выходит на самый высокий КДП, а 2-х полюсный при номинальных 3600 об/мин дает низкую эффективность. Таким образом, хотя насосы с номинальной частотой вращения 3600 об/мин могут быть более эффективными (и иметь низкую закупочную стоимость), чем насосы со скоростью вращения 1800 об/мин, электродвигатели последних могут быть более эффективными, плюс эти насосы, как правило, имеют более низкий NPSHR и энергию всасывания, не говоря уже о более длительном сроке службы. Также следует отметить, что номинальная мощность электродвигателя влияет на его эффективность, большие электродвигатели имеют большую эффективность, чем малые.
Скорость вращения асинхронного электродвигател я
Синхронная скорость вращения асинхронного электродвигателя рассчитывается по следующей формуле:
n = 120*f/p
где:
n = скорость вращения в об/мин
f = частота питающей сети (Гц)
p = количество полюсов (min = 2)
Для регулирования частоты вращения электродвигателя без использования внешних механических устройств необходимо регулировать напряжение и частоту подаваемого тока. Некоторые электродвигатели могут быть изготовлены с несколькими обмотками (количество полюсов) для достижения двух или более различных скоростей вращения.
Асинхронные электродвигатели вращаются со скоростью, которая меньше скорости вращения магнитного поля (на 1-3% при полной нагрузке). Разница между фактической и синхронной частотой вращения называется скольжением. Для новых более энергоэффективных электродвигателей скольжение имеет тенденцию уменьшаться в отличие от старых электродвигателей с обычным КПД. Это означает, что при заданной нагрузке энергоэффективные электродвигатели работают немного быстрее.
Рисунок 3. Эффективность при полной и частичной загрузке двигателя с низким и высоким КПД
Электродвигатели с высоким КПД
На рисунке 3 изображен пример возможного повышения эффективности, когда старый электродвигатель с обычной эффективностью заменяется новым, имеющим более высокий КПД. Как упоминалось ранее, электродвигатели с высоким КПД работают с меньшим скольжением, что дает некоторое увеличение скорости вращения, а следовательно напор насоса и производительность становятся несколько больше.
Однако, использование электродвигателей с высоким КПД в некоторых (с изменением подачи) процессах будет не оправданно, из-за большей скорости вращения (и напора насоса), до тех пор пока существующие электродвигатели по-прежнему слабо загружены (работающие с низким КПД). Т.к. входная мощность на валу насоса пропорциональна скорости в кубе, простая замена старого электродвигателя новым с высоким КПД не обязательно приведет к снижению потребления энергии.
С другой стороны, если немного большая подача и напор для насоса — это хорошо, замена старого
электродвигателя с обычным КПД на новый с высоким КПД может быть оправдана.
Коэффициент мощности электродвигателя
Другая проблема
Определение количества оборотов электродвигателя
Довольно часто во время проведения работ необходимо точно знать, сколько оборотов делает
асинхронный двигатель.
Кстати, такую задачу не все электрики могут решить. Хотя сложного в этом ничего нет.
Определяем вид двигателя по обмотке
Для того чтобы определить тип двигателя по обмотке, с него необходимо снять заднюю крышку. Полумуфта и шкив нет необходимости снимать. Убираем охладительный кожух, а также крыльчатку, для того, чтобы открыть доступ к крышке электродвигателя. После того, как крышку уберете, вы увидите обмотку все целиком. Посмотрите, как размещена одна секция по отношению к стартеру. Если катушка распределена на 180-ти градусах, то этот двигатель совершает 3000 оборотов в минуту.
Если вы видите, что вокруг стартера ляжет 3 пролета обмотки (сто двадцать градусов), то эти электродвигатели 1500 оборотов в минуту способны выполнять. В том случае, если в окружности стартера поместится 4 секции (девяносто градусов), то такой двигатель имеет скорость работы, равный тысяче оборотов в минуту.
Вот таким нехитрым методом мы легко можем обозначить скорость работы электродвигателя. Такой метод прекрасно подойдет для тех двигателей, в которых обмотка распределяется по пролетам.
Определение числа оборотов при помощи миллиамперметра
Существует еще несколько способов определения числа оборотов. Ротор электрического двигателя обладает магнитным полем. Это магнитное поле наводит ЭДС в стартерной обмотке во время вращения ротора. С помощью миллиамперметра ЭДС можно легко «словить».
Мы должны произвести следующие действия:
- Находим одну фазу (вернее ее обмотку). Нет разницы, каким образом будут соединяться обмотки: в виде треугольника или звезды.
- Кончики обмотки подключаем к миллиамперметру.
- Вращаем вал электродвигателя.
- Следим за количеством отклонений стрелки прибора во время одного оборота ротора:
2 раза – двигатель делает 2300 оборотов в минуту;
4 раза – 1500 оборотов;
6 раз – 1000 оборотов;
8 раз – 750 оборотов.
Категория: Статьи | Просмотров: 1526
Теги: двигатель, электродвигатель, обмотка двигателя
Обороты асинхронного двигателя формула. Способы регулирования скорости асинхронного двигателя
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2: 1 = р2: pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2: 1 = Рг: Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Существенным недостатком асинхронных электродвигателей является относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения асинхронных электродвигателей можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: n 2 = 60f 1 (1 ‑s )/p . Анализ формулы показывает, что частоту вращения асинхронного двигателя можно изменить, меняя скольжение ротораs , число пар полюсовр двигателя или частотуf 1 питающего напряжения.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или изменением активного сопротивления в цепи ротора.
Регулирование частоты вращения изменением активного сопротивления возможно только для асинхронных двигателей с фазным ротором, в обмотку которого (посредством контактных колец) включается добавочное регулировочное сопротивление по такой же схеме, как и при пуске двигателя. Однако пусковое сопротивление не годится для регулирования скорости, так как оно не рассчитано на длительну
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
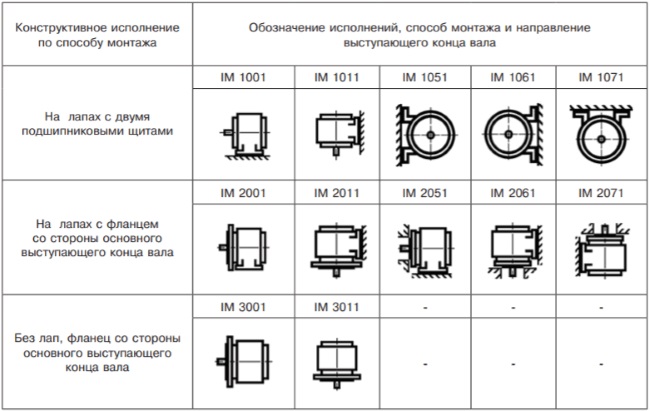
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
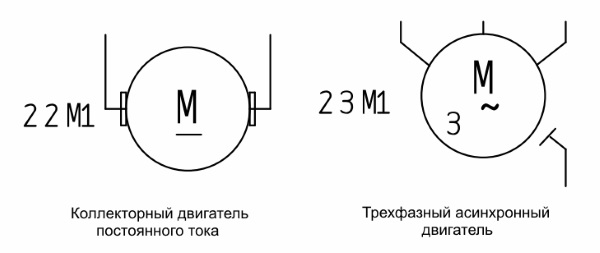
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Формула расчета частоты вращений
При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Тахометр
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Формула расчёта числа оборотов двигателя постоянного тока
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Видео
Оцените статью:Электрические асинхронные двигатели— синхронная скорость
Синхронная скорость для электрического асинхронного двигателя определяется
- частотой источника питания , а
- числом полюсов в обмотке двигателя.
Синхронная скорость может быть рассчитана как:
n = f (2 / p) 60 (1)
где
n = скорость вращения вала (об / мин, об / мин)
f = частота электропитания (Гц, циклы / с, 1 / с)
p = количество полюсов
Примечание — асинхронный двигатель никогда не будет достичь его синхронной скорости.Если бы это было так, ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — синхронная скорость двухполюсного электродвигателя
На двухполюсный двигатель подается мощность с частотой 50 Гц (1 / с) .Скорость вращения может быть рассчитана как
n = (50 1 / с) (2/2) (60 с / мин)
= 3000 об / мин (1 / мин)
Синхронный скорость вращения при разных частотах и количестве полюсов
| Скорость вращения вала — n — (об / мин, об / мин) | ||||||
|---|---|---|---|---|---|---|
| Частота — f — (Гц) | Количество полюса — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 200 | 150 | 120 100 | |
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 60 0 | 450 | 360 | 300 |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 50 1 | 1000750 | 600 | 500 | |||
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 | 1050 | 840 | 700 |
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 5410 | ||||||
| 9010 | 1080 | 900 | ||||
| 100 | 901 10 60003000 | 2000 | 1500 | 1200 | 1000 | |
- Двигатели, рассчитанные на 50 Гц, чаще всего встречаются за пределами U.S
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.

Частотно-регулируемый привод
Частотно-регулируемый привод модулирует скорость электродвигателя путем изменения частоты источника питания.
.Разница между синхронным и асинхронным двигателем
Разница между синхронным двигателем и асинхронным двигателем объясняется с учетом таких факторов, как его тип, скольжение, потребность в дополнительном источнике питания, требования к контактным кольцам и щеткам, их стоимость, эффективность, коэффициент мощности, источник тока, скорость, самозапуск , влияние на крутящий момент из-за изменения напряжения, их рабочей скорости и различных применений как синхронного, так и асинхронного двигателя.
Различия между синхронным и асинхронным двигателем объясняются ниже в табличной форме.
| BASIS | СИНХРОННЫЙ ДВИГАТЕЛЬ | АСИНХРОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Определение | Синхронный двигатель — это машина, у которой скорость ротора и скорость магнитного поля статора равны. N = NS = 120f / P | Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость. N |
| Тип | Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом — это синхронные двигатели. | Асинхронный двигатель переменного тока известен как асинхронный двигатель. |
| Накладка | Не имеет скольжения. Значение скольжения равно нулю. | Есть пробуксовка, поэтому величина пробуксовки не равна нулю. |
| Дополнительный источник питания | Требуется дополнительный источник питания постоянного тока для первоначального вращения ротора почти до синхронной скорости. | Не требует дополнительных пусковых источников. |
| Контактное кольцо и щетки | Требуется контактное кольцо и щетки | Контактное кольцо и щетки не требуются. |
| Стоимость | Синхронный двигатель дороже по сравнению с асинхронным двигателем | Дешевле |
| КПД | КПД выше, чем у асинхронного двигателя. | Менее эффективный |
| Коэффициент мощности | Путем изменения возбуждения коэффициент мощности можно отрегулировать соответственно как запаздывающий, опережающий или единичный. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. |
| Электропитание | Ток подается на ротор синхронного двигателя | Ротор асинхронного двигателя не требует тока. |
| Скорость | Скорость двигателя не зависит от изменения нагрузки. Это постоянно. | Скорость асинхронного двигателя уменьшается с увеличением нагрузки. |
| Самозапуск | Синхронный двигатель не самозапускается | Самозапускается |
| Влияние на крутящий момент | Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя | Изменение приложенного напряжения влияет на крутящий момент асинхронного двигателя |
| Рабочая скорость | Они работают плавно и относительно хорошо на низкой скорости ниже 300 об / мин. | Двигатель работает со скоростью выше 600 об / мин безупречно. |
| Приложения | Синхронные двигатели используются на электростанциях, в обрабатывающей промышленности и т. Д., Они также используются в качестве регулятора напряжения. | Используется в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и подъемниках. и т. д. |
Синхронный двигатель — это двигатель, который работает с синхронной скоростью, т.е. скорость ротора равна скорости статора двигателя.Отсюда следует соотношение N = N S = 120f / P, где N — скорость ротора, а Ns — синхронная скорость.
Асинхронный двигатель — это асинхронный двигатель переменного тока. Ротор асинхронного двигателя вращается со скоростью меньше синхронной, т.е. N
Подробное объяснение разницы между синхронным и асинхронным двигателем приведено ниже.
- Синхронный двигатель — это машина, у которой скорость ротора и скорость магнитного поля статора равны.Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной.
- Бесщеточный двигатель, двигатель с регулируемым сопротивлением, двигатель с регулируемым сопротивлением и двигатель с гистерезисом являются синхронными двигателями. Асинхронный двигатель переменного тока известен как асинхронный двигатель.
- Синхронный двигатель не имеет скольжения. Значение скольжения равно нулю. Асинхронный двигатель имеет скольжение, поэтому значение скольжения не равно нулю.
- Синхронному двигателю требуется дополнительный источник постоянного тока для первоначального вращения ротора, близкого к синхронной скорости.Асинхронный двигатель не требует дополнительного источника пуска.
- Контактное кольцо и щетки требуются в синхронном двигателе, тогда как асинхронный двигатель не требует контактного кольца и щеток. Только асинхронный двигатель с обмоткой требует и контактного кольца, и щеток.
- Синхронный двигатель дороже асинхронного двигателя.
- КПД синхронного двигателя больше, чем у асинхронного двигателя.
- Путем изменения возбуждения коэффициент мощности синхронного двигателя может быть отрегулирован соответственно как отстающий, опережающий или единичный, тогда как асинхронный двигатель работает только с отстающим коэффициентом мощности.
- Ток передается на ротор синхронного двигателя. Ротор асинхронного двигателя не требует тока.
- Скорость синхронного двигателя не зависит от изменения нагрузки. Это постоянно. Скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель запускается автоматически.
- Изменение приложенного напряжения не влияет на крутящий момент синхронного двигателя, но влияет на крутящий момент асинхронного двигателя.
- Синхронный двигатель работает плавно и относительно хорошо на низкой скорости, которая ниже 300 об / мин, тогда как скорость выше 600 об / мин работа асинхронного двигателя превосходна. Асинхронные двигатели используются в центробежных насосах и вентиляторах, воздуходувках, бумажных и текстильных фабриках, компрессорах и лифтах. и т. д.
- Синхронный двигатель используется в различных сферах применения на электростанциях, обрабатывающей промышленности и т. Д. Он также используется в качестве регулятора напряжения.
Разница между асинхронным двигателем и синхронным двигателем
Разница между асинхронным двигателем и Синхронный двигатель объясняется с помощью различных факторов, например типа возбуждения, используемого в машине. Скорость двигателя, запуск и работа, эффективность обоих двигателей, его стоимость, использование и области применения. частота.
| ОСНОВА РАЗЛИЧИЯ | СИНХРОННЫЙ ДВИГАТЕЛЬ | ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ |
|---|---|---|
| Тип возбуждения | Синхронный двигатель — это машина с двойным возбуждением. | Асинхронный двигатель — это машина с одним возбуждением. |
| Система питания | Обмотка якоря запитывается от источника переменного тока, а обмотка возбуждения — от источника постоянного тока. | Его обмотка статора запитана от источника переменного тока. |
| Скорость | Он всегда работает с синхронной скоростью. Скорость не зависит от нагрузки. | При увеличении нагрузки скорость асинхронного двигателя уменьшается. Она всегда меньше синхронной скорости. |
| Запуск | Это не самозапуск. Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости. | Асинхронный двигатель имеет самозапускаемый момент. |
| Эксплуатация | Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение. | Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности становится очень низким. |
| Использование | Может использоваться для коррекции коэффициента мощности в дополнение к передаче крутящего момента для привода механических нагрузок. | Асинхронный двигатель используется только для привода механических нагрузок. |
| КПД | Он более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения. | Его КПД ниже, чем у синхронного двигателя той же мощности и номинального напряжения. |
| Стоимость | Синхронный двигатель дороже, чем асинхронный двигатель той же мощности и номинального напряжения. | Асинхронный двигатель дешевле синхронного двигателя той же мощности и номинального напряжения. |
Асинхронный двигатель также известен как асинхронный двигатель . Он называется так потому, что никогда не работает с синхронной скоростью. то есть N s = 120f / P. Асинхронный двигатель является наиболее широко используемым двигателем во всех отечественных и коммерческих двигателях. Синхронный двигатель всегда следует синхронной скорости. Скорость вращения ротора поддерживается или синхронизируется с током питания
.Разница между трехфазным асинхронным двигателем и синхронным двигателем
- Трехфазный синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.
- Обмотка якоря синхронного двигателя питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока. Обмотка статора асинхронного двигателя питается от источника переменного тока. Синхронный двигатель
- всегда работает с синхронной скоростью, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает со скоростью меньше синхронной. Если нагрузка увеличилась, скорость асинхронного двигателя уменьшается.
- Асинхронный двигатель имеет самозапускающийся крутящий момент, тогда как синхронный двигатель не самозапускается.Перед синхронизацией с источником переменного тока его необходимо каким-либо образом разогнать до синхронной скорости.
- Синхронный двигатель может работать с запаздывающей и опережающей мощностью, изменяя его возбуждение. Асинхронный двигатель работает только с отстающим коэффициентом мощности. При высоких нагрузках коэффициент мощности асинхронного двигателя становится очень низким.
- Синхронный двигатель может использоваться для коррекции коэффициента мощности в дополнение к подаче крутящего момента для привода механических нагрузок, тогда как асинхронный двигатель используется только для привода механических нагрузок.
- Синхронный двигатель более эффективен, чем асинхронный двигатель той же мощности и номинального напряжения.
- Синхронный двигатель дороже асинхронного двигателя той же мощности и номинального напряжения.