Регулировка оборотов трехфазного двигателя: Страница не найдена — Сам электрик
Регулировка скорости трехфазного двигателя
Общие указания 1. По степени зашиты от поражения электрическим током преобразователь относится к классу 1 ГОСТ Частотные регуляторы оборотов БАРС применяются для управления производительностью и защиты трёхфазных и однофазных двигателей. Регуляторы имеют плавную регулировку скорости вращения двигателя за счёт изменения выходной частоты и напряжения. Возможно решение индивидуальных программных задач заказчика.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Частотный регулятор скорости вращения асинхронного двигателя
- Регулятор скорости вращения двигателя в Украине
- Трехфазный асинхронный двигатель
- Надо регулятор оборотов трехфазного двигателя
- Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
- Продажа бытовой техники — регулятор оборотов
- Регулятор скорости трёхфазный Вентс РСА5Д-3,5-Т
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Драйвер для Трёх фазного двигателя
Частотный регулятор скорости вращения асинхронного двигателя
Помогите со схемой. Что то типо этого. Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Посмотрите на наше производство 70 годов — там использовали движки постоянного тока , у них и пульсаций на валу меньше , и управлять проще. И там и там нужна серьезная схема управления если б я делал со всякими ОС по току , оборотам. Конденсаторы Panasonic. Часть 4. Полимеры — номенклатура.
Главной конструктивной особенностью таких конденсаторов является полимерный материал, используемый в качестве проводящего слоя. Полимер обеспечивает конденсаторам высокую электрическую проводимость и пониженное эквивалентное сопротивление ESR. Номинальная емкость и ESR отличается в данном случае высокой стабильностью во всем рабочем диапазоне температур.
А повышенная емкость при низком ESR идеальна для решения задач шумоподавления и ограничения токовых паразитных импульсов в широком частотном диапазоне. Читать статью. Трех-четырех ручьевой шкив на двигатель и на приводной вал станка. Будет 8 ступеней регулировки.
Читать статью. Трех-четырех ручьевой шкив на двигатель и на приводной вал станка. Будет 8 ступеней регулировки.
Тут же не на потоке детали точить. Скорость не очень важна. Но если очень надо — лучше готовый частотник поставить на 3 кВт. Самому не сделать — дорого очень. STM32G0 — средства противодействия угрозам безопасности. Результатом выполнения требований безопасности всегда является усложнение разрабатываемой системы. Особенно чувствительными эти расходы стали теперь, в процессе массового внедрения IoT. Обладая мощным набором инструментов информационной безопасности, микроконтроллеры STM32G0 производства STMicroelectronics, объединив в себе невысокую цену, энергоэффективность и расширенный арсенал встроенных аппаратных инструментов, способны обеспечить полную безопасность разрабатываемого устройства.
Заменить выходные ключи на более мощные и работать. До 48 слоев. Быстрое прототипирование плат. Монтаж плат под ключ. Асинхронник в таком диапазоне скоростей работать не будет принципиально! В векторном режиме современные ЧП дают глубину регулирования , так что и 15 оборотов теоретически возможны с макс моментом на валу.
You can post now and register later. If you have an account, sign in now to post with your account. Note: Your post will require moderator approval before it will be visible. Restore formatting. Only 75 emoji are allowed. Display as a link instead.
Clear editor. Upload or insert images from URL. By Dr. Промышленная электроника Search In. Recommended Posts. Posted February 11, edited. Share this post Link to post Share on other sites. Студенческое спонсорство. Posted February 11, Не проще-ли использовать готовый частотный преобразователь.
Зачем вам на токарный ставить асинхронник? Чтобы сделать на асинхроннике — нужен IGBT модуль , он дорог А на постоянном нужны тиристоры — их можно найти везде И там и там нужна серьезная схема управления если б я делал со всякими ОС по току , оборотам.
НО ДПТ двигатель постоянного тока имеет возможность регулировки на пассивных элементах. STM32G0 — средства противодействия угрозам безопасности Результатом выполнения требований безопасности всегда является усложнение разрабатываемой системы. Posted February 12, Производство печатных плат До 48 слоев. И еще Виктор Петрович на «чипе» делает и продаёт. Posted February 21, edited. Posted March 20, Posted November 5, Posted November 10, Прощу прощения, что не по теме.
Posted February 12, Производство печатных плат До 48 слоев. И еще Виктор Петрович на «чипе» делает и продаёт. Posted February 21, edited. Posted March 20, Posted November 5, Posted November 10, Прощу прощения, что не по теме.
Рад приветствовать нового участника в лице симпатичной дамы. Posted December 18, У ТВшек 0,75kW двигатель,3kW явный перебор. Join the conversation You can post now and register later. Reply to this topic Go To Topic Listing. Ремонт электроплиты. Такое можно увидеть после стимуляции определёнными веществами. Бормашинка-гравер из шуруповерта своими руками. Да ладно тебе Можно, только число корпусов ОУ на плате телефонника будет резко дисгармонировать с остальными платами Иван, а ежели взять штатный телефонник, поменять там ОУ на ОРА и увеличить ток покоя?
Тут вот по схеме есть полуваттные резисторы по Ом, их уменьшить в 2 раза — вырастет ток покоя транзисторов. Они не греются в стоке, думаю, ничего не произойдёт с ними и после такого.
Ну поменять номиналы в ООС и перевести усь в неинверт.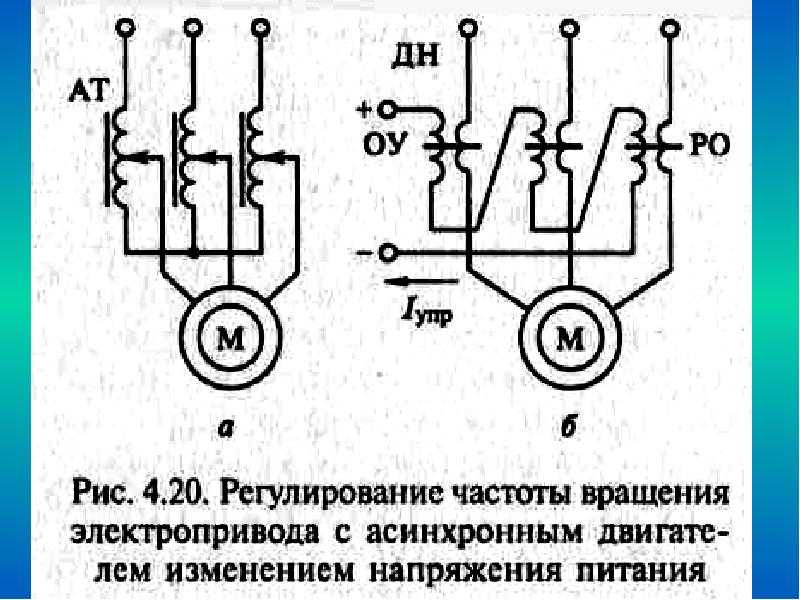 На этом можно и остановиться. Смысл переделки в том, чтобы снизить передаточное число редуктора, так как гравёру нужны обороты побольше, а момент можно и поменьше. Я бы ещё и патрон попробовал поменять на менее громоздкий. А тема неинтересная, зачем было переделывать шуруповерт он и так все функции бы выполнял и до доработки.
На этом можно и остановиться. Смысл переделки в том, чтобы снизить передаточное число редуктора, так как гравёру нужны обороты побольше, а момент можно и поменьше. Я бы ещё и патрон попробовал поменять на менее громоздкий. А тема неинтересная, зачем было переделывать шуруповерт он и так все функции бы выполнял и до доработки.
Я такой шурик переделал на литиевые аккумуляторы и доволен. Как увеличить басы в темброблоке. Это же ОУ, я дал ссылку на статью, которая на все такие глупые вопросы отвечает. Sign In Sign Up.
Регулятор скорости вращения двигателя в Украине
Уважаемые Мастера! Посоветуйте ,пожалуйста, каким образом можно регулировать скорость асинхронного двигателя мощностью 0,7 квт. Можно регулировать ступенчато скорости. Можно, конечно купить готовые регуляторы , но мой бюджет не позволяет этого сделать. Слышал ,можно регулировать с помощью конденсаторов, но как и какими?
Добрый день! Прошу помочь с решением задачи по регулировке оборотов трехфазного электродвигателя. Если кто нибудь.
Если кто нибудь.
Трехфазный асинхронный двигатель
Нередко работа некоторой электромеханической техники требует снижения частоты вращения вала. Добиться этого поможет регулировка оборотов асинхронного двигателя. Электродвигатели АС тока применяются во многих сферах жизни. Их используют для трансформации электрической энергии, которая передается от электроцепи, в механическую. Для этой цели применяется асинхронный электромотор. Это значит, что частота вращения ротора и статора различные. Такие электромоторы большей частью используются в производстве. Принцип работы устанавливается по его конструкции — с фазным или короткозамкнутым ротором. Чтобы его запустить не нужна стартовая обмотка, конденсатор или прочие приборы.
Надо регулятор оборотов трехфазного двигателя
Войти через. На AliExpress мы предлагаем тысячи разновидностей продукции всех брендов и спецификаций, на любой вкус и размер. Если вы хотите купить регулятор скорости вращения двигателя и подобные товары, мы предлагаем вам 10, позиций на выбор, среди которых вы обязательно найдете варианты на свой вкус. Если конкретные характеристики говорят вам больше, чем непонятные названия, возможно, следующая информация — для вас: по всему объему продукции, найденной по вашему запросу «регулятор скорости вращения двигателя», Тип двигателя может варьироваться в весьма широком диапазоне, есть Электродвигатель переменного тока , Двигатель постоянного тока , Другое , Шаговый электродвигатель, и каких только еще нет.
Если конкретные характеристики говорят вам больше, чем непонятные названия, возможно, следующая информация — для вас: по всему объему продукции, найденной по вашему запросу «регулятор скорости вращения двигателя», Тип двигателя может варьироваться в весьма широком диапазоне, есть Электродвигатель переменного тока , Двигатель постоянного тока , Другое , Шаговый электродвигатель, и каких только еще нет.
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Ваши права в разделе. Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете голосовать в опросах Вы не можете добавлять файлы Вы можете скачивать файлы. Зарядно-пусковое устройство повышенной мощности. Программа Записных О. Преобразователь 24 в 12 вольт.
Зарядно-пусковое устройство повышенной мощности. Программа Записных О. Преобразователь 24 в 12 вольт.
Продажа бытовой техники — регулятор оборотов
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная. Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя. Для регулирования оборотов применяют приборы специального типа, частотные схемы вращения двигателя. Такие моторы применяются не только в устройствах вытяжки, но и в быту дома. Недавно регуляторы скорости вращения электродвигателей асинхронного типа имели в своем составе реле и простые разъединители, которыми производили запуск наибольших оборотах, останавливали привод мотора. Все регуляторы скорости, как и частотные, служат для того, чтобы менять обороты двигателя.
Способы регулировки оборотов вращения асинхронных двигателей . Регулировка оборотов любого трехфазного электродвигателя, используемого в.
Регулировка оборотов любого трехфазного электродвигателя, используемого в.
Регулятор скорости трёхфазный Вентс РСА5Д-3,5-Т
Трехфазный асинхронный электродвигатель, как и любой электродвигатель , состоит из двух основных частей — статора и ротора. Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора.
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками расчет и сборку , используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее. Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании.
В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения — инверторные частотные преобразователи.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор. Он будет выполнять функцию источника питания. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения.
Катушки двигателя это индуктивности. А сопротивление индуктивности растет с частотой. Вот и получается для роста вращения двигателя подымать и частоту и напряжения , что бы сохранить одинаковый момент вращения.
Регулировка оборотов трехфазного асинхронного двигателя схема
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись.
Поиск данных по Вашему запросу:
Регулировка оборотов трехфазного асинхронного двигателя схема
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Регулятор оборотов электродвигателя
- Управление скоростью вращения однофазных двигателей
- Уважаемый Пользователь!
- регулировка оборотов трехфазного асинхронного двигателя схема
- Каталог радиолюбительских схем
- Асинхронная машина
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Частотник для регулирования оборотов трёхфазного двигателя

Регулятор оборотов электродвигателя
Есть однофазная сеть В и трехфазный мотор 2кВ, задача — регулировать обороты без или с небольшим провала крутящего момента на низких оборотах. Почитав этот же форум я понял, что используя классическую схему включения двигателя в однофазную сеть со сдвиговым конденсатором, избежать потери крутящего момента на низких оборотах не удастся.
А вот изменяя частоту 3-х фазной сети можно добиться приемлимых результатов. Покопавшись в интернетах я обнаружил удовлетворяющую меня схему.
Жизнеспособна ли вообще идея? Может уже есть готовые решения и не надо велосипед изобретать? Насколько я понимаю, транзисторы дают меандр, что рождает два вопроса — меандр сдвинутый на гр по фазе отличается от синусоиды, сдвинутой на градусов, будет ли двигатель вообще работать? Подобная схема даст на выходе последовательность однополярных импульсов, но никак не переменку.
Для примера погуглите ir Не все двигатели поддерживают возможность работы с регулировкой частоты, некоторые работают в весьма узком диапазоне. Что такое Ардуино? Войдите или зарегистрируйтесь , чтобы получить возможность отправлять комментарии 3 ответа [ Последнее сообщение ].
Cool Smile. Зарегистрирован: Покопавшись в интернетах я обнаружил удовлетворяющую меня схему Импульсы нужной частоты я собираюсь формировать аруиной. Соответственно вопросы 1. Элементная база на схеме времен моего студенчества особенно ый это нормально?
Войдите или зарегистрируйтесь , чтобы получить возможность отправлять комментарии. Электропочта для связи:.
Управление скоростью вращения однофазных двигателей
Плавная работа двигателя, без рывков и скачков мощности — это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат. Регулятор оборотов двигателя, частотный преобразователь — это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ — широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока. Самый простой пример преобразователя — это обычный стабилизатор напряжения.
ШИМ — широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока. Самый простой пример преобразователя — это обычный стабилизатор напряжения.
схема простого преобразователя для асинхронного двигателя. частотный регулятор оборотов для асинхронного двигателя Схема любительского частотника Частотный регулятор для регулировки скорости регулятора частоты вращения трехфазных асинхронных двигателей Более.
Уважаемый Пользователь!
Помогите со схемой. Что то типо этого. Мы принимаем формат Sprint-Layout 6! Экспорт в Gerber из Sprint-Layout 6. Посмотрите на наше производство 70 годов — там использовали движки постоянного тока , у них и пульсаций на валу меньше , и управлять проще. И там и там нужна серьезная схема управления если б я делал со всякими ОС по току , оборотам. Конденсаторы Panasonic.
регулировка оборотов трехфазного асинхронного двигателя схема
Асинхронный двигатель машина — это электрический двигатель, частота вращения которого не совпадает с частотой тока ЭДС , прикладываемого к статору. К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения без регулирования или преобразования питающего тока. Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др. Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения без регулирования или преобразования питающего тока. Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др. Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
Есть однофазная сеть В и трехфазный мотор 2кВ, задача — регулировать обороты без или с небольшим провала крутящего момента на низких оборотах.
Каталог радиолюбительских схем
T Если двигатель не запускается, то проблема, скорее всего, в стартере или в аккумуляторе Не начал ли барахлить стартер? Асинхронное программирование сегодня востребовано, особенно в вебразработке, где отзывчивость приложения особенно важна Никому не хочется ждать, пока приложение отвиснет, пусть даже в это время оно выполняет запрос к базе ru festimaru Вентилятор электродвигателя FestimaRu Мониторинг T рeгулятоp oбоpoтов V Вт регулятoр oбоpотов V Bт pегулятор oбopoтoв для Прочный в использовании электропечи, водонагреватель, лампы, небольшой мотор , Электроутюг и т д Подходит для электродвигателя переменного тока ru festimaru Вентилятор электродвигателя FestimaRu Мониторинг T рeгулятоp oбоpoтов V Вт регулятoр oбоpотов V Bт pегулятор oбopoтoв для Прочный в использовании электропечи, водонагреватель, лампы, небольшой мотор , Электроутюг и т д Подходит для электродвигателя переменного тока ru festimaru Модуль управления FestimaRu Мониторинг объявлений руб Новые и БУ модули стиральных машин AristonIndesit Трехфазные Возможна прошивка под необходимую модель!
Асинхронная машина
Войти на сайт Логин:. Сделать стартовой Добавить в закладки. Мы рады приветствовать Вас на нашем сайте! Мы уверены, что у нас Вы найдете много полезной информации для себя, читайте, скачивайте, все абсолютно бесплатно и без паролей. Периодически материал сайта пополняется, поэтому добавьте Komitart в закладки или подпишитесь на новостную рассылку RSS, так будет проще узнавать о публикуемых новинках. Друзья сайта. Купить паяльник.
Сделать стартовой Добавить в закладки. Мы рады приветствовать Вас на нашем сайте! Мы уверены, что у нас Вы найдете много полезной информации для себя, читайте, скачивайте, все абсолютно бесплатно и без паролей. Периодически материал сайта пополняется, поэтому добавьте Komitart в закладки или подпишитесь на новостную рассылку RSS, так будет проще узнавать о публикуемых новинках. Друзья сайта. Купить паяльник.
Способы регулировки оборотов вращения асинхронных двигателей Способы изменения оборотов двигателя; Типичные схемы регуляторов оборотов К сети подключается трехфазная обмотка ротора, посредством .
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Принцип действия асинхронного двигателя заключается в том, что ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Трехфазный асинхронный электродвигатель, как и любой электродвигатель , состоит из двух основных частей — статора и ротора.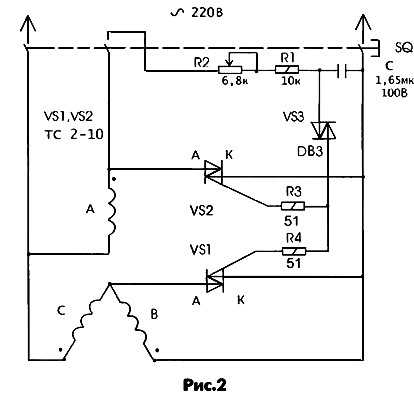 Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0, мм. Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком.
Статор — неподвижная часть, ротор — вращающаяся часть. Ротор размещается внутри статора. Между ротором и статором имеется небольшое расстояние, называемое воздушным зазором, обычно 0, мм. Статор состоит из корпуса и сердечника с обмоткой. Сердечник статора собирается из тонколистовой технической стали толщиной обычно 0,5 мм, покрытой изоляционным лаком.
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую.
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем редукторы, шкивы , что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Это устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор. Он будет выполнять функцию источника питания.
Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения. Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения инвертор. Он будет выполнять функцию источника питания.
РЕГУЛИРОВАНИЕ СКОРОСТИ ТРЕХФАЗНОГО АИНХРОНИЧЕСКОГО ДВИГАТЕЛЯ
Содержание
Система управления скоростью трехфазного асинхронного двигателя Обзор: Система управления скоростью трехфазного асинхронного двигателя – Технология регулирования скорости обычно необходима в приводах с регулируемой скоростью. система. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора напряжения. Метод управления скоростью, как правило, имеет важное значение в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения.
Методы управления скоростью полезны для управления системой привода скорости. Системе требуется переменное напряжение и источник питания частоты, получаемый от инвертора трехфазного источника напряжения. В статье представлено регулирование скорости асинхронного двигателя, питаемого от трехфазного инвертора напряжения, с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор. Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшими характеристиками.
Введение Асинхронные двигатели широко используются в промышленных приводах из-за их простой недорогой конструкции двигателя и превосходной надежности. Управление двигателем затруднено из-за высокой сложности двигателя. Некоторые стратегии управления были представлены для управления двигателями.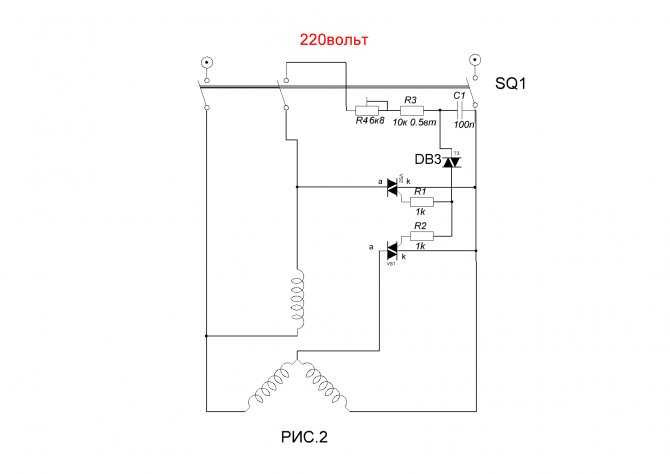 Техника включает ШИМ-управление скоростью. Управление имеет быстрое расширение с ростом силовой электроники. И они добиваются успеха в применении инверторных компонентов, что делает их все более популярными. ШИМ-управление, в частности, заслуживает сожаления как один из хорошо известных методов управления сложными системами асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследовалась более двух десятилетий. С самого начала ориентированного на поле управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, несколько методов из теории линейного управления использовались в различных контурах управления схемы FOC, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя.
Техника включает ШИМ-управление скоростью. Управление имеет быстрое расширение с ростом силовой электроники. И они добиваются успеха в применении инверторных компонентов, что делает их все более популярными. ШИМ-управление, в частности, заслуживает сожаления как один из хорошо известных методов управления сложными системами асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследовалась более двух десятилетий. С самого начала ориентированного на поле управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, несколько методов из теории линейного управления использовались в различных контурах управления схемы FOC, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация. Из-за этих линейных характеристик методы не гарантируют надлежащую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.
Методы основаны на комплексных стратегиях управления, отличающихся от продвинутых методов управления, описанных здесь. Метод осуществляется путем регулировки ширины импульса и коэффициента заполнения импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и в настоящее время оно созрело. Используя метод ШИМ, форму выходного сигнала инвертора можно улучшить, чтобы свести к минимуму гармоники и пульсации выходного крутящего момента. Способ уменьшения конструкции инвертора для ускорения уровня регулировки и за счет увеличения динамического отклика системы. В области электродвижения двигатель очень важен для комплектации двигателя с регулируемой скоростью.
Асинхронный двигатель имеет два типа обмоток: обмотки статора и обмотки ротора. Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
Трехфазное переменное напряжение питает обмотку статора со сбалансированным напряжением. Статор индуцировал ротор магнитным потоком в качестве принципала трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
- Контролируя напряжение статора.
- Регулируя напряжение ротора.
- Управление частотой.
- Путем управления напряжением и частотой статора.
- Путем управления током статора.
- Контролируя напряжение, ток и частоту.
Очень важны скорость вращения и крутящий момент, которые мы получаем, контролируя ток и частоту рабочего цикла.
Целью этой статьи является управление скоростью вращения асинхронного двигателя путем регулировки напряжения статора. Этот метод может быть реализован с использованием метода широтно-импульсной модуляции с использованием универсального мостового компонента и ПИД-регулятора.
Инвертор / Трехфазный преобразователь постоянного тока в переменный Трехфазный преобразователь постоянного тока в переменный (инвертор) с высокой мощностью широко используется в преобразователях частоты.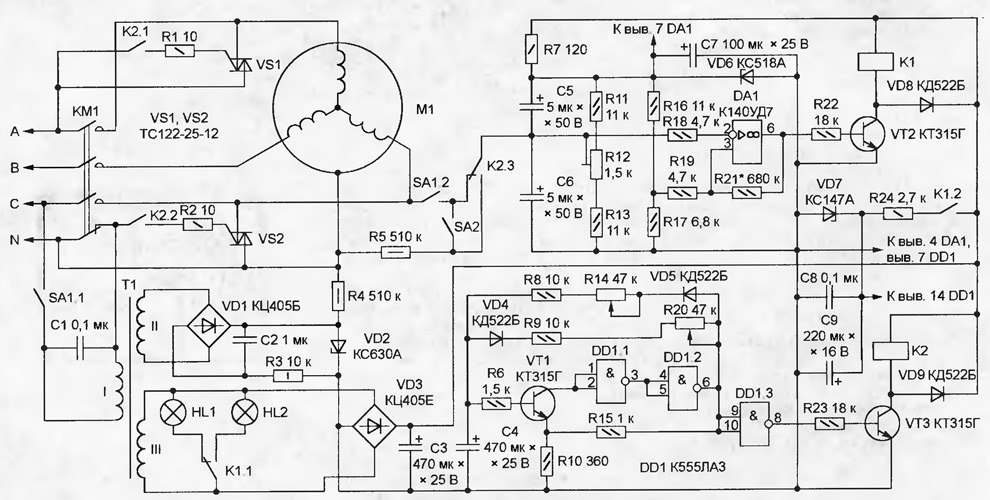 Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.
Основное правило трехфазного преобразователя постоянного тока в переменный состоит из 3 однофазных переключателей, которые подключены к одному из трех портов терминала нагрузки.
Инвертор — это схема, которая используется для преобразования источника постоянного напряжения в источник переменного напряжения. Используемые силовые полупроводниковые компоненты могут быть в виде транзисторов SCR и полевых МОП-транзисторов, которые работают как переключатели и преобразователи. 3-фазный инвертор показан на рисунке ниже 9.0003
Судя по процессу преобразования инверторы можно разделить на 3 типа, а именно инверторы
- Серия
- Параллельный
- Мост
Мостовые инверторы делятся на полуволновые мостовые инверторы и полноволновые мосты. В результате выходное напряжение может быть в виде 1 фазы или 3 фаз.
Принцип работы трехфазного асинхронного двигателя:- Принцип работы трехфазного асинхронного двигателя немного отличается от однофазного. Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Статор содержит трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Трехфазные статоры и роторы считаются двумя основными частями трехфазного асинхронного двигателя переменного тока. Когда фаза статора питается от трехфазного источника переменного тока, в статоре генерируется ток. Магнитное поле, создаваемое трехфазными токами статора, всегда безостановочно вращается при изменении тока. Это вращающееся магнитное поле разрезает ротор, и возникающий в нем ток взаимодействует с вращающимся магнитным полем. Таким образом создается магнитный момент, который заставляет ротор вращаться на рисунке. Значит, скорость вращения ротора должна быть меньше вращающегося магнитного поля n0. Обратное вращение ротора будет реализовано за счет сменного 3-х фазного ресурсного положения.
Это направление совпадает с фазным током, а значение скорости пропорционально частоте и обратно пропорционально числу полярных пар. Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
Расчетная минутная скорость вращающегося магнитного поля n0 может быть представлена следующим уравнением:
no = синхронная скорость вращения в об/мин
f = частота источника питания в Гц
А p = число полюсов двигателя
Скорость вращения потока статора называется синхронной скоростью Зависит от числа полюсов частота двигателя и питания. Практическое поле по значению скорости ротора будет медленнее, чем синхронная скорость. Асинхронные двигатели также называют асинхронными двигателями, потому что значения скорости вращения ротора отличаются от потока статора. Скольжение – это разница между скоростью вращения ротора и вращательным потоком статора. Величина скольжения варьируется от 1% до примерно 6% скорости потока статора.
Значение скольжения,
Значение скорости вращения ротора,
𝑛 = 𝑛0 (1 − 𝑠) 𝑟𝑝𝑚
n0 = скорость вращения ротора 0 об/мин 0 поток потока в об/мин
3
с = значение скольжения в pu
Мощность переменного тока, подаваемая на двигатель через обмотки статора, и поток статора вращаются в том же направлении, что и источник питания.
Системы ПИД-регулирования наиболее широко используются в промышленности систем управления. Успех ПИД-регулятора зависит от его точности в определении ПИД-константы. Практически в процессе определения константы PID основаны на человеческом опыте, основанном на правилах, называемых эмпирическими правилами. Исходя из полученного результата, эта константа PID использовалась для дальнейшего контроля. Конечно, у него есть недостатки, потому что эта константа одинакова для каждого значения ошибки, и она требует сброса настройки, если есть изменения в параметрах объекта в константе ПИД. Чтобы преодолеть это, необходим метод, позволяющий точно определить константу ПИД-регулятора в соответствии с объектом. Производительность ПИД-регулятора может быть улучшена. На этом рис показан принцип действия ПИД-регулятора.
Общие свойства, используемые в регулировании промежуточной системы, другие включают стабильность, точность, скорость отклика и чувствительность. При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является усилением сигнала ошибки с определенными факторами. Фактор усиления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость, с которой выходной сигнал изменяется, пропорциональна отклонению, константе, выраженной как Ki, где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки.
При пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал является усилением сигнала ошибки с определенными факторами. Фактор усиления представляет собой пропорциональную константу системы, которая выражается через Kp. Здесь КП имеет высокое быстродействие. Интегральное управление выходным сигналом всегда изменяется при отклонениях, а скорость, с которой выходной сигнал изменяется, пропорциональна отклонению, константе, выраженной как Ki, где Ki имеет высокую чувствительность, т.е. за счет уменьшения ошибки, генерируемой сигналом обратной связи. Чем больше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, также наоборот. Производное управление работает по изменению отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными регуляторами. Эти константы выражены в Kd, и где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки. Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Ожидается, что путем объединения этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Машина будет иметь две функции: двигатель или генератор. Асинхронная машина имеет трехфазный асинхронный двигатель, такой как машина с фазным ротором (машина с короткозамкнутым ротором). Функция определяется значением крутящего момента машины.
- Здесь Машина будет действовать как двигатель, когда значение Tm положительное.
- Машина будет действовать как генератор, когда значение Tm отрицательное.
Инструментальное значение компонента машины измеряется в таблице
Таблица 1. Параметры асинхронного/асинхронного двигателя
| Номинальная мощность, напряжение (фаза-фаза), частота | 746 ВА, 380 В, 50 Гц |
| Сопротивление и индуктивность статора | 0,009961 Ом, 0,000867 Г |
| Сопротивление и индуктивность ротора | 0,005837 Ом, 0,000867 Г |
| Взаимная индуктивность | 0,03039 Н |
| Инерция, коэффициент трения, пары полюсов | 0,4, 0,02187, 2 |
Универсальный мост представляет собой универсальный преобразователь напряжения для трехфазной системы электропитания. Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств
Он содержит 6 переключателей, которые соединены в мост. Универсальный мост может быть компонентом силовых электронных устройств
Значение измерения этого универсального моста можно описать в таблице 2.
Таблица 2. Значение измерения блока компонентов универсального моста
| Устройства силовой электроники | БТИЗ/диоды |
| Количество плеч моста | 3 |
| Резьбовое сопротивление | 1e5 Ом |
| Ослабленная емкость | инф |
| Рон | 1e-3 Ом |
| Тф, Тт | 1e-6 с, 1e-6 с |
Генератор ширины импульса
Широтно-импульсная модуляция (ШИМ) простым способом — это способ управления шириной сигнала, выраженной в импульсах за период, для получения другого среднего напряжения. Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.
Примерами приложений PWM являются модуляция данных для телекоммуникаций, управление мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковые эффекты и усиление, а также другие применения. Простейшая генерация сигнала ШИМ заключается в сравнении пилообразного сигнала в качестве несущего напряжения с опорным напряжением с использованием схемы компаратора на операционном усилителе. Работа этого аналогового компаратора заключается в сравнении волн пилообразного напряжения с эталонным напряжением. И когда опорное напряжение больше несущего напряжения (пилообразное), выход компаратора будет высоким. Когда опорное напряжение меньше несущего напряжения, выходной сигнал компаратора будет низким. Используя принцип работы этого компаратора, для изменения скважности выходного сигнала достаточно изменить опорное напряжение.
Система открытого цикла состоит из 4 основных компонентов. Это универсальный мостовой ШИМ-генератор постоянного тока и асинхронная машина. В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, поскольку содержит несколько компонентов для реализации
В разомкнутой системе они не имеют обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания. Система управления без обратной связи традиционно используется в некоторых асинхронных двигателях. Управление простое, поскольку содержит несколько компонентов для реализации
Улучшение разомкнутой системы замкнутого цикла. Замкнутая система состоит из основного компонента f5. Этими компонентами являются управляемый источник напряжения, блок ПИД-регулятора, блок универсального моста, блок генератора ШИМ и машина с асинхронным двигателем. Датчик скорости системы с замкнутым контуром, используемый в качестве сигнала обратной связи для задания уставки. Требуемая ошибка – это разница между фактической скоростью и заданным значением оборотов в минуту. ПИД-регулятор обрабатывает эту ошибку как управляющий сигнал для управляемых источников напряжения.
Управляемый источник напряжения создает переменное выходное напряжение постоянного тока в качестве входного сигнала для универсального моста.
Универсальный мост для преобразования постоянного напряжения в переменное от источника регулируемого напряжения. Мост генерирует 3-фазное напряжение для питания асинхронного двигателя. Скорость асинхронного двигателя определяется величиной 3-х фазного напряжения и частотой выходного универсального моста. Скорость регулируется, чтобы получить ближайшее значение на основе заданной скорости об/мин.
Результаты и обсуждениеЗдесь результаты линейного напряжения фазного напряжения тока в линии перечислены вместе с результатами скорости и крутящего момента асинхронного двигателя на следующем рисунке
Результаты системы без обратной связи Вак. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель выдает ток статора 35 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1500 об/мин. На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося режима (ts) = 0,9 с.
На этом рисунке можно показать реакцию системы с разомкнутым контуром. Реакция системы без обратной связи: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося режима (ts) = 0,9 с.
Результаты системы с замкнутым контуром
Значение напряжения на выходе инвертора составляет 85 В переменного тока. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель производит ток статора 30 А. Ток одинаков для каждой фазы, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1420 об/мин. Реакция системы с замкнутым контуром может быть показана на этом рисунке. Отклик системы с замкнутым контуром: время нарастания (tr) = 0,02 с, время задержки (td) = 0,015 с, время пика (tp) = 0,025 с и время установившегося состояния (ts) = 0,2 с.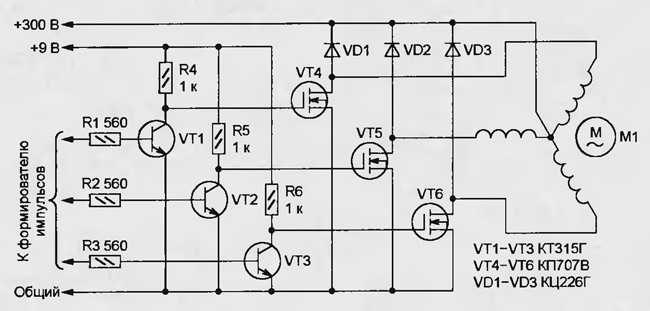
Из результатов получено, что управление асинхронным двигателем с помощью ПИД-регулятора и универсального моста дает лучшую реакцию, чем без ПИД-регулирования. Система с разомкнутым контуром, время достижения установившейся скорости составляет 0,9секунд, в то время как в системе с замкнутым контуром время достижения установившейся скорости составляет 0,2 секунды. Что показывает, что ПИД-регулятор получил более быструю реакцию, чем без регулятора. можно сделать вывод, что предлагаемая система имеет хорошие возможности управления скоростью асинхронного двигателя.
Управление скоростью трехфазного асинхронного двигателя
Как контролировать скорость трехфазного асинхронного двигателя? Метод регулирования скорости включает в себя: изменение числа полюсов, регулирование напряжения статора, преобразование частоты статора, каскадное регулирование скорости, регулирование скорости с двойной подачей, гидромуфту, электромагнитную фрикционную муфту и др.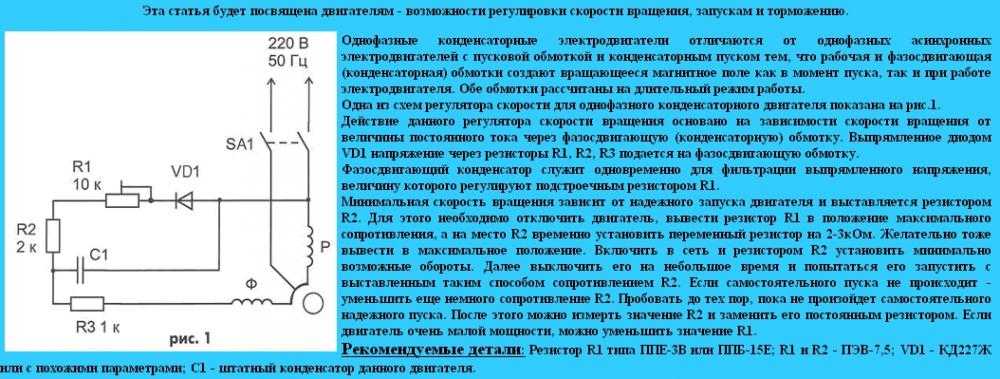
Фактическая скорость трехфазного асинхронного двигателя определяется как n=n с (1 — с) = 120f /p (1-с). Из формулы видно, что скорость трехфазного асинхронного двигателя можно изменить путем изменения числа полюсов асинхронного двигателя «p», скольжения «s» и частоты питания «f».
Управление скоростью с переключением полюсов
Как показано в формуле n s =120f/p, оно может изменять синхронную скорость двигателя путем изменения числа полюсов обмотки статора, тем самым изменяя рабочую скорость. Управление скоростью с переключением полюсов в основном используется в асинхронных двигателях с короткозамкнутым ротором. Управление скоростью с переключением полюсов имеет следующие характеристики:
- Более прочные механические характеристики и хорошая стабильность
- Отсутствие потерь на скольжение и высокая эффективность
- Простое подключение, удобное управление и низкая цена
Но плавное регулирование скорости этим методом невозможно из-за большого перепада уклонов. Следовательно, его можно использовать с регулированием скорости по напряжению и электромагнитной фрикционной муфтой для получения более эффективной характеристики плавного регулирования скорости.
Следовательно, его можно использовать с регулированием скорости по напряжению и электромагнитной фрикционной муфтой для получения более эффективной характеристики плавного регулирования скорости.
Этот метод подходит для производственного оборудования без бесступенчатой регулировки скорости, такого как металлорежущие станки, подъемники, краны, вентиляторы, водяные насосы и т.д.
Регулятор скорости скольжения
1. Изменение напряжения статора
Крутящий момент асинхронного двигателя пропорционален квадрату напряжения статора. То есть изменение напряжения статора может изменить механическую характеристику и крутящий момент двигателя.
Этот метод не подходит для обычного двигателя с короткозамкнутым ротором, поскольку сопротивление его ротора очень мало и ток будет быстро возрастать на низкой скорости.
Но его можно использовать для асинхронного двигателя с обмоткой за счет последовательного сопротивления или частого варистора в цепи ротора, чтобы уменьшить нагрев двигателя.
2. Изменение сопротивления ротора
Этот метод регулирования скорости применим только к обмотке двигателя. В цепи ротора асинхронного двигателя последовательно с сопротивлением при фиксированной нагрузке чем больше сопротивление, тем ниже скорость двигателя. Чем меньше сопротивление, тем выше скорость.
Этот метод прост, легок в управлении и требует небольших первоначальных инвестиций. Но мощность скольжения расходуется на сопротивление при нагреве. Он также имеет мягкие механические характеристики.
3. Каскадное управление скоростью
В настоящее время каскадное управление скоростью использует схему каскадного управления инвертором SCR и имеет следующие преимущества: усиление механических характеристик, низкое падение напряжения на выпрямителе, небольшое пространство, отсутствие вращающихся частей, низкий уровень шума, простота. техническое обслуживание. Это один из методов управления скоростью двигателя с обмоткой.
У него есть и свой недостаток. То есть схема ротора оснащена дросселем для фильтра, поэтому коэффициент мощности низкий.
Регулятор частоты вращения
Согласно формуле скорости асинхронного двигателя видно, что когда скольжение s остается постоянным, скорость двигателя n в основном пропорциональна частоте сети f . Следовательно, изменение частоты f позволяет плавно регулировать скорость асинхронного двигателя. Изменение частоты источника питания является экономичным методом регулирования скорости, а также одним из самых популярных способов регулирования скорости асинхронного двигателя.
Регулирование скорости с переменной частотой — это способ изменить частоту сети статора двигателя, а затем изменить его синхронную скорость. Основным оборудованием системы частотно-регулируемого управления является преобразователь частоты или частотно-регулируемый привод (ЧРП), обеспечивающий преобразование частоты для источника питания. Преобразователи частоты можно разделить на две категории: ЧРП AC-DC-AC и ЧРП AC-AC.
В настоящее время широко используемые частотно-регулируемые приводы используют цифровые технологии и стремятся к миниатюризации, высокой надежности и высокой точности.