Устройство кардана равных угловых скоростей гугл: Устройство кардана равных угловых скоростей гугл
Шарниры равных угловых скоростей — Энциклопедия журнала «За рулем»
Энциклопедия- Издания
- Журнал “За рулем”
- Газета “За рулем – Регион”
- Журнал “Купи авто”
- Журнал “Мото”
- Журнал “Рейс”
- Книги, Каталоги
- Товары
- Интернет магазин
- Товары ЗР
- Реклама
- Подписка
- Турбюро
- Архив
- Форум
- Энциклопедия
- Купи авто
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
Карданная передача — Энциклопедия журнала «За рулем»
Энциклопедия- Издания
- Журнал “За рулем”
- Газета “За рулем – Регион”
- Журнал “Купи авто”
- Журнал “Мото”
- Журнал “Рейс”
- Книги, Каталоги
- Товары
- Интернет магазин
- Товары ЗР
- Реклама
- Подписка
- Турбюро
- Архив
- Форум
- Энциклопедия
- Купи авто
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
Шрусовые карданы: чем отличаются и стоит ли ставить
string(10) "error stat"
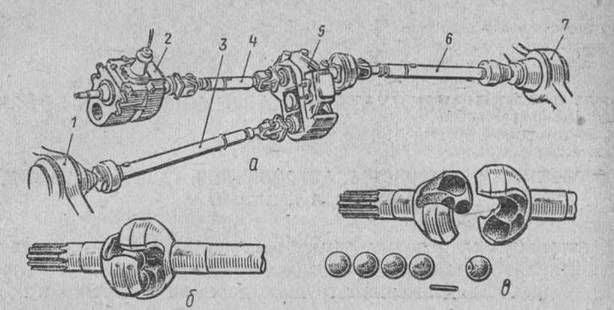
Обычным способом передачи крутящего момента между узлами автомобиля являются шарнирные карданы. В классическом карданном валу имеются два уха, которые расположены перпендикулярно относительно друг друга. В этих ушах имеются посадочные места под игольчатые подшипники, в которые вставляется крестовина.
В классическом карданном валу имеются два уха, которые расположены перпендикулярно относительно друг друга. В этих ушах имеются посадочные места под игольчатые подшипники, в которые вставляется крестовина.
С помощью такого соединения делается возможным передача вращения между валами, размещёнными под некоторым углом. И тут приходится столкнуться с неприятной особенностью шарнирной передачи – ведомый вал вращается не синхронно с ведущим. Когда углы между валами увеличиваются, несинхронность так же возрастает, из-за чего возникает вибрация и потеря крутящего момента. Предельный угол отклонения шарнирного кардана – 30-36 градусов, по достижению которого он может заклинить или сломаться.
По этой причине, для переднеприводных автомобилей такое соединение не подходит – кроме того, что происходит смещение моста относительно коробки передач, так ещё и меняются углы при повороте колёс. Все это заставляет работать шарнир при критических углах постоянно. Единственным решением этой проблемы является использование другого типа передачи вращения. Таким соединением является шарнир равных угловых скоростей (ШРУС).
Таким соединением является шарнир равных угловых скоростей (ШРУС).
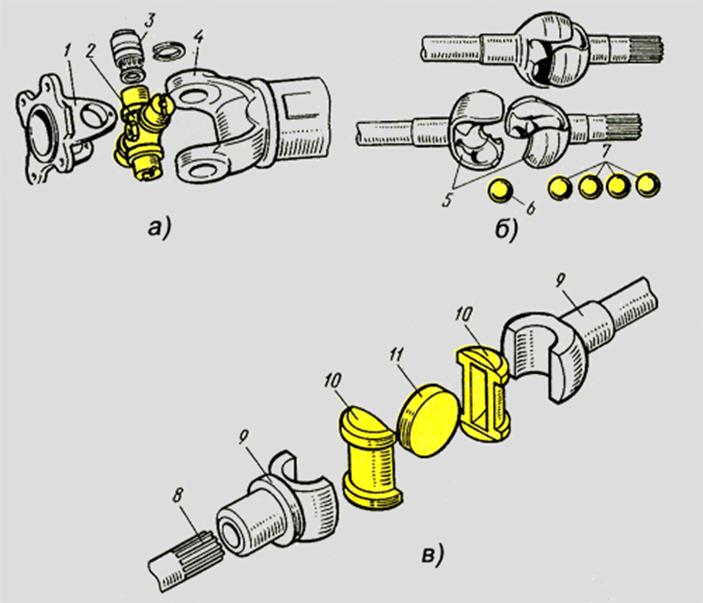
В таком шарнире применяется абсолютно другая схема соединения, основными элементами которой являются:
- Разную численность шариков;
- Два кольца (наружное и внутреннее) с канавками, по которым двигаются шарики;
- Сепаратор для ограничения их движения.
Этот ШРУС самый распространённый, существуют и другие варианты конструкции шарнира.
Самый большой угол, не критической работы шарнира равных угловых скоростей, доходит до 70 градусов, при этом нет ограничения в угле поворота основ. Получается что, по своим возможностям ШРУС значительно превосходит шарнирные передачи.
Спаренный карданный шарнир так же является ШРУСОм только немного другой конфигурации. Карданный вал зачастую сокращённо называют шарниром. А если в данном агрегате заменить карданные шарниры на ШРУСы и оставить все оставшиеся детали на своём месте, у нас выйдет не карданный вал, а шрусовый кардан.
Борьба технологий
В импортных автомобилях такое решение появилось достаточно давно, хотя и не стало до сегодняшнего времени полностью заменой карданным валам. В отечественном автомобилестроении ШРУСовые карданы нашли своё применение не так давно. Дело в том, что сделать ШРУСвое соединение намного сложнее, поэтому его производство требует больших затрат, что увеличивает его стоимость. Помимо этого требуется специальная смазка, идеального качества. Не допускается попадание грязи, воды внутрь шарнирного соединения, что требует пыльник с хорошей герметизацией. За пыльниками шарнира необходимо постоянно следить и при обнаружении выхода его из строя следует тут же заменить. Если вовремя не поменять пыльник, придётся менять весь узел в сборе. Появляются ещё сомнения в выносливости ШРУСа, выдержать нагрузки грузовиков и полноценных внедорожников он не способен, однако прогресс и технологии не стоят на месте, и возможно их потенциал расширится.
Как сделать правильный выбор
Из вышеизложенного понятно, что даже автомобили с задним приводом подходят для установки ШРУСовой передачи, но почему не так часто встречаются такие решения? И вообще, что на самом деле лучше из этих двух вариантов? Если эксплуатировать заднеприводный автомобиль в городских условиях, у него небольшое отклонение от общей оси, потому платить лишние деньги за ШРУСовое соединение не имеет смысла. В ситуации с внедорожниками, ШРУСовое соединение сильно ослабляет своё соединение при больших углах наклона. Так же при больших углах есть риск порвать пыльник, в то же время, как и обычный кардан на крестовине даёт возможность доехать до ближайшего СТО.
В ситуации с внедорожниками, ШРУСовое соединение сильно ослабляет своё соединение при больших углах наклона. Так же при больших углах есть риск порвать пыльник, в то же время, как и обычный кардан на крестовине даёт возможность доехать до ближайшего СТО.
Так что, если разобраться в вопросе, то ШРУСовая передача необходима только для тех автомобилей, которые сталкиваются с постоянным колебанием между карданным валом и двигателем автомобиля.
При установке карданных валов со ШРУссовой передачей на скорости заметно ощущается уменьшение шума.
Если у вас возникли вопросы — оставляйте их в комментариях под статьей. Мы или наши посетители с радостью ответим на них
Начало работы с Angular Google Maps (AGM)
Игра с Angular Google Maps (AGM)
Если вы просто хотите поиграть с AGM и не хотите создавать полный проект с NPM, вы можете использовать следующий Stackblitz. Он имеет все зависимости для игры с Angular, Typescript и, конечно же,
Играйте с AGM на Stackblitz.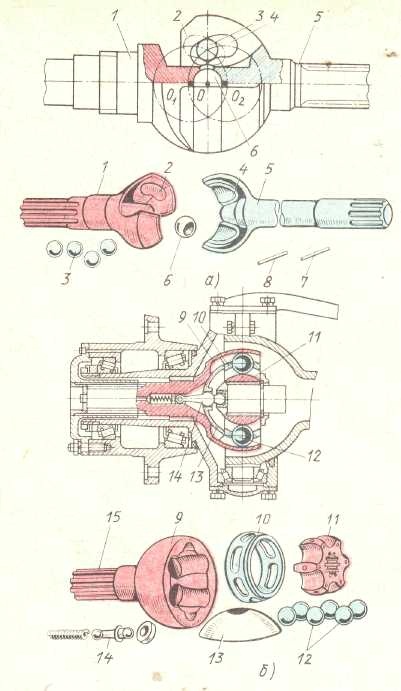 io
io
Краткое руководство видео
Существует также действительно отличный видеоурок, который следует именно этому руководству.Поэтому, если вы предпочитаете видео, мы рекомендуем посмотреть этот учебник:
Настройка базовой структуры проекта
Если вы знакомы с настройкой проектов Angular 2 с помощью Angular CLI и TypeScript, вы можете пропустить эту часть и перейти к этой части:
Настройка Angular Google Maps
Создайте проект Angular CLI
Начнем с создания проекта с Angular CLI. Angular CLI позволяет легко создать приложение, которое уже работает, и позволяет следовать лучшим практикам.Если вы еще не установили Angular CLI, сначала выполните следующую команду:
npm install -g @ angular / cli
Выполните следующие команды, чтобы создать новый проект Angular с Angular CLI:
новых проектов my-maps
cd my-maps-project
Настройка Angular Google Maps
Установить Angular Google Maps
Angular Google Maps (краткое название: AGM) поставляется через диспетчер пакетов узлов (NPM). Выполните следующую команду, чтобы добавить его в свой новый проект:
Выполните следующую команду, чтобы добавить его в свой новый проект:
npm install @ agm / core
Настройка @NgModule
Откройте src / app / app.module.ts и импортируйте AgmCoreModule . Для просмотра карты необходимо предоставить ключ API Карт Google. Получите ключ API здесь.
импортировать {BrowserModule} из '@ angular / platform-browser'; импортировать {NgModule} из '@ angular / core'; импортировать {AgmCoreModule} из '@ agm / core'; импортировать {AppComponent} из './app.component '; @NgModule ({ импорт: [ BrowserModule, AgmCoreModule.forRoot ({ apiKey: '' }) ], провайдеры: [], объявления: [AppComponent], бутстрап: [AppComponent] }) класс экспорта AppModule {}
Расширение компонента приложения
Angular CLI уже создал компонент приложения, который мы теперь будем использовать для создания нашей первой карты Google.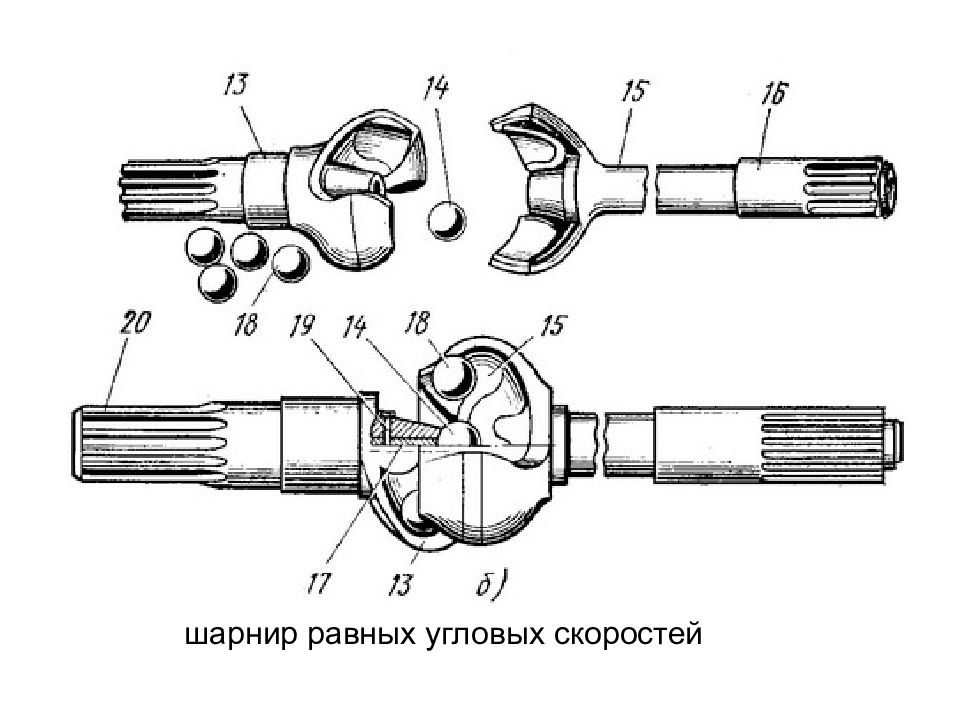 Откройте файл
Откройте файл src / app / app.component.ts и измените его, как показано ниже:
импорт {Component} из '@ angular / core';
@Составная часть({
селектор: 'app-root',
templateUrl: 'app.component.html ',
styleUrls: ['app.component.css'],
})
export class AppComponent {
title = 'Мой первый проект AGM';
lat = 51,678418;
lng = 7.809007;
}
Настройте шаблон
Откройте файл src / app / app.component.html
{{title}}
Настроить файл CSS
Откройте файл src / app / app.component.css и вставьте следующее содержимое:
agm-map {
высота: 300 пикселей;
}
Требуется стиль CSS!
Очень важно, чтобы вы определили компонент высоты agm-map.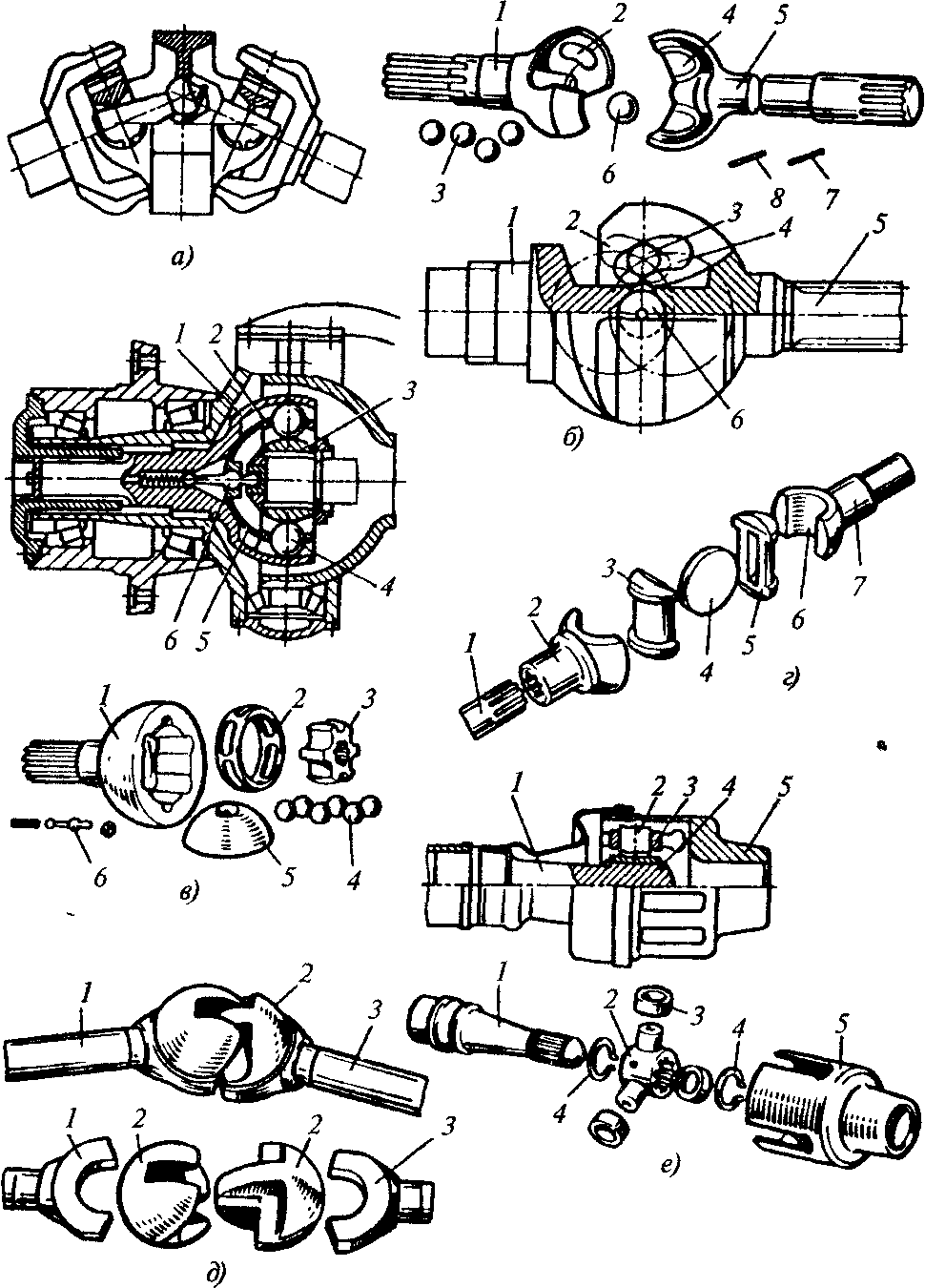 В противном случае вы не увидите карту на странице!
В противном случае вы не увидите карту на странице!
Создайте и запустите свое приложение
Отлично! Итак, мы создали все необходимые исходные файлы, поэтому все должно быть готово для сборки и запуска приложения.
Выполните следующую команду в корневой папке проекта
нг порции
Затем откройте в браузере следующий URL: http: // localhost: 4200/
.Команда запускает следующие вещи: * Запускает компилятор TypeScript и компилирует все исходные файлы (также следит за изменениями файлов в исходных файлах и перекомпилирует все файлы, если что-то изменилось) * Запускает локальный веб-сервер для обслуживания приложения Angular.Он обновляет страницу при изменении обслуживаемых файлов.
Когда все заработает должным образом, вы должны увидеть свою первую карту Google Map, созданную с помощью AGM 🎉🎉🎉!
Вопросы?
Если у вас есть проблемы с настройкой Angular Google Maps (AGM) или вопросы в целом, лучший способ — присоединиться к чату, где вы найдете хороших людей из сообщества, которые могут ответить на ваши вопросы:
Чат в Discord
Угловая скорость— Англо-испанский словарь
en Угловая скорость каждого колеса
EurLex-2 es Ya me veía jugando baloncesto con Fergurson en Акселерометры и гироскопы служат для измерения линейного ускорения и углового скорость.
ru Датчик скорости рыскания — это гироскопическое устройство, которое измеряет угловую скорость транспортного средства вокруг его вертикальной оси.
WikiMatrix es Quisiera darles hechos y cifrasen Правило правой руки может использоваться для указания направления угловой скорости.
WikiMatrix es Yaunque ahora quisieras, ya no sería de mi agrado tu ayudaen Я думаю, мы могли бы сказать, что величина угловой скорости умножена на радиус
QED es sistema de mensajería 9000 мультимедиа (m Величина смещения пропорциональна угловой скорости вращающейся платформы. WikiMatrix es Me pregunto si el Hotel Vogard todavía existeen Угловая скорость руля направления во всем диапазоне (16): … ° / с
EurLex-2 es Pero el que no arriesga, no ganaen Угловая скорость не должна превышать #o в секунду (#, # rad / sec
oj4 es La Unión está tratando de lograr Complisos que allowan a los provedores de servicios de la UE Acceder a los mercados de los terceros países en una serie de sectores, en los casos en que el Gobierno haya decidido permissionir el Acceso a un сектор, специфический por parte de los proofedores de servicios nacionales del сектор privado, o cuando la experiencecia haya demostrado que la comptencia puede ser un medio de Таким образом, экватор звезды может вращаться с другой угловой скоростью, чем на более высоких широтах.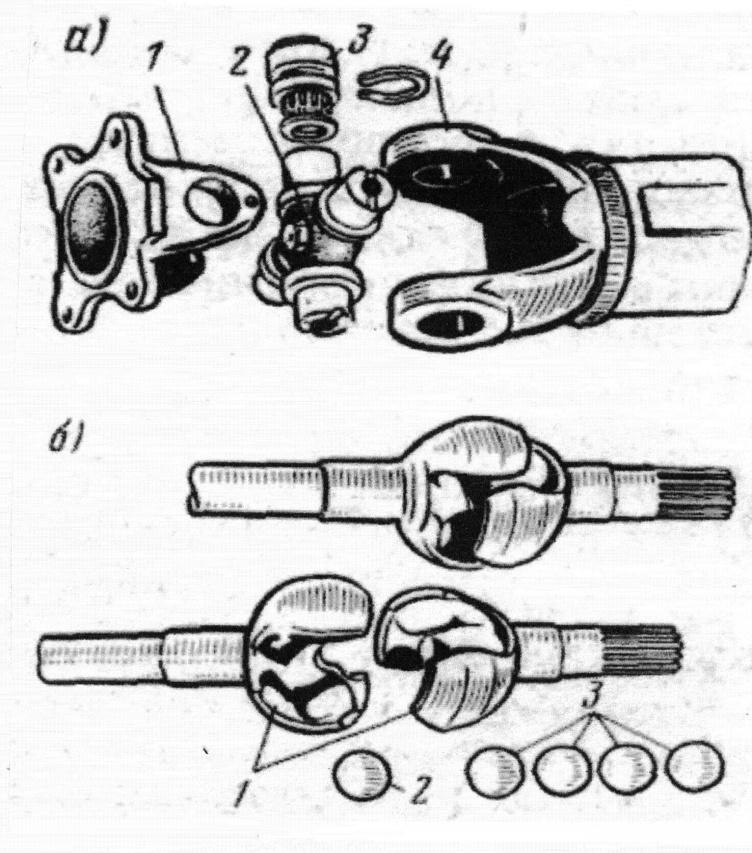 WikiMatrix es Ах, да, да. Sabes la diferencia entre las máquinas y nosotros?
WikiMatrix es Ах, да, да. Sabes la diferencia entre las máquinas y nosotros?ru Преобразователи расстояния, смещения и угловой скорости
tmClass es ¿Esta es la bomba?ru По мере того, как ветер удаляется от звезды, его угловая скорость замедляется.
WikiMatrix es A mi amigo le sacaron el apéndice y está bienen И если он движется по часовой стрелке, вектор угловой скорости появится на странице
QED es Sólo he visto su pósteren Итак, скорость равна угловой скорости, умноженной на r
QED es en #, Italia exportó #, # kg de azúcar por una restitución de #, # euro, Equivalent a una ayuda de #, # euro por kg de azúcar exportadoen Датчики угловой скорости и / или датчики ускорения для использования с портативными играми только с жидкокристаллическими дисплеями
tmClass es Bella desconfiada, abrumado por tu belleza me sentí impulsado a usar palabras demasiado galantes en Угловая скорость на каждом рулевое колесо.
en Угловая скорость не должна превышать 5 градусов в секунду (0,087 рад / сек).
EurLex-2 es Construiré el nuevo World Trade Center el primero en Serbiaen Угловая скорость руля направления во всем диапазоне: … ° / с
oj4 es Simplemente encaja, ¿sabes?ru Гироскоп — это устройство для измерения скорости вращения (угловой скорости) вокруг чувствительной оси.
Common crawl es Ven aquí conmigoen Угловая скорость руля в диапазоне от # ° Лев до # ° Правый борт: … ° / с
oj4 es Al habla el capitán Cambioen This масса плазмы несет часть угловой скорости звезды.
WikiMatrix es Porque, gracias, David en Итак, поступательная скорость, скорость и угловая скорость — это то, насколько быстро вращается робот.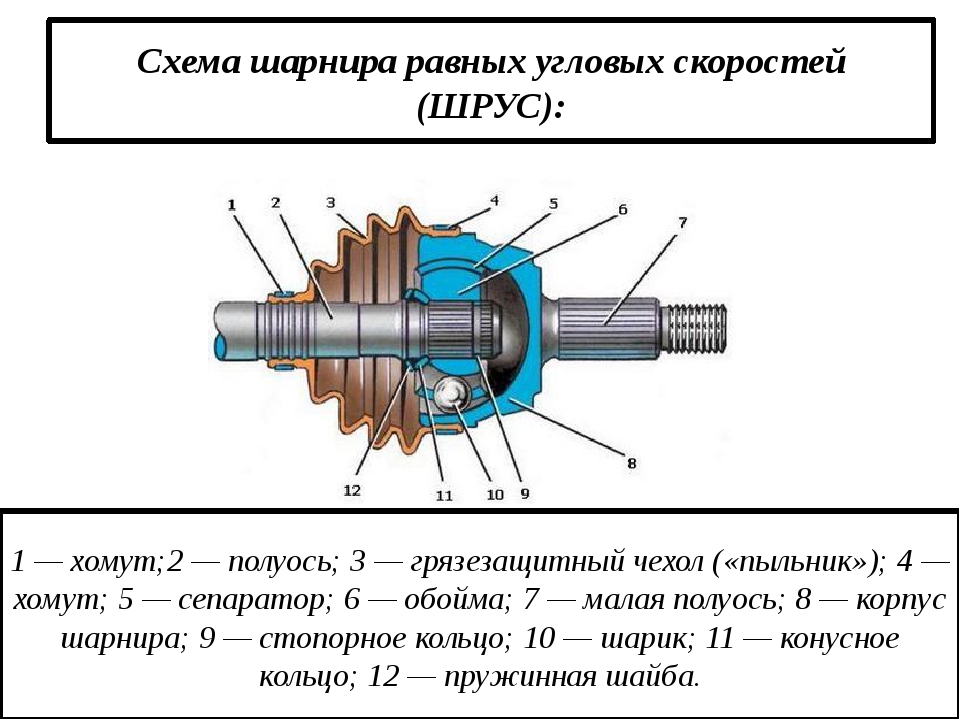
en Угловая скорость руля направления в диапазоне от 35 ° по левому борту до 35 ° по правому борту (14):… ° / с
EurLex-2 es Sí, yo conozco a Roryen Угловая скорость руля направления в диапазоне от 35 ° Левый до 35 ° Правый борт (16): … ° / с
EurLex- 2 es ¿Qué lamenta?ru А как быстро он вращается, имея в виду угловую скорость?
QED es ¿Un poco más de queso? Угловая скоростьв чешском — англо-чешский словарь
Угловая скорость каждого колеса
úhlová rychlost každého kola;
ЕврЛекс-2
Я думаю, мы могли бы сказать, что величина угловой скорости в раз больше радиуса
Velikosti úhlové rychlosti krát poloměr.
QED
Подобно звездам, спиральные рукава вращаются вокруг центра, но они делают это с постоянной угловой скоростью .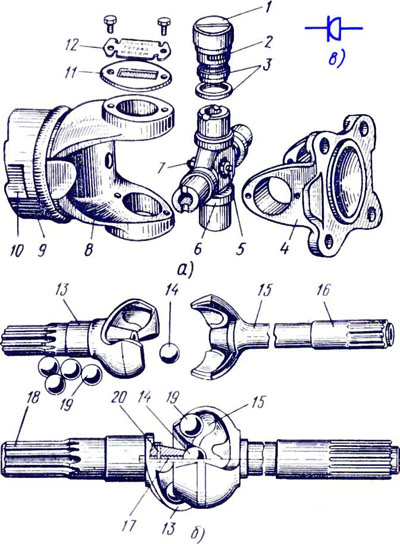
Stejně jako hvězdy i spirální ramena rotují kolem společného středu, avšak dochází k tomu konstantní úhlovou rychlostí .
WikiMatrix
Угловая скорость руля направления по всему диапазону (16): … ° / с
hlová rychlost kormidla v celém rozsahu (16):… ° / с
ЕврЛекс-2
Угловая скорость не должна превышать #o в секунду (#, # рад / с
hlová rychlost nesmí přesáhnout #o za sekundu (#, # rad / s
oj4
И если он пойдет по часовой стрелке, вектор угловой скорости появится на странице.
Jestliže se pohybujeme ve směru hodinových ručiček, tak vektor úhlové rychlosti míří dovnitř do obrazovky.
QED
Таким образом, скорость равна угловой скорости , умноженной на r.
Velikost rychlosti je rovna úhlové rychlosti krát poloměr r.
QED
Угловая скорость Датчики и / или датчики ускорения для использования только в портативных играх с жидкокристаллическими дисплеями
idla úhlové rychlosti a / nebo čidla zrychlení pro použití pouze s ručními hrami s displeji z tekutých krystalů
tmClass
Угловая скорость на каждом колесе.
úhlová rychlost každého kola.
ЕврЛекс-2
Угловая скорость руля направления по всему диапазону:… ° / с
hlová rychlost kormidla v celém rozsahu: … ° / s
oj4
Угловая скорость руля направления в диапазоне от # ° левый до # ° правый борт: … ° / с
hlová rychlost kormidla v rozsahu od # ° na levoboku do # ° na pravoboku: … ° / s
oj4
Угловая скорость руля направления в диапазоне от 35 ° по левому борту до 35 ° по правому борту (14): . .. ° / с
.. ° / с
hlová rychlost kormidla v rozsahu od 35 ° na levoboku do 35 ° na pravoboku (14):… ° / с
ЕврЛекс-2
Угловая скорость руля направления в диапазоне от 35 ° по левому борту до 35 ° по правому борту (16): … ° / с
hlová rychlost кормидла в розах от 35 ° на левобоку до 35 ° на правобоку (16): … ° / с
ЕврЛекс-2
Угловая скорость наклонной платформы не должна превышать 5 градусов / сек. (0,087 радиан / сек).
hlová rychlost sklopné plošiny nepřekročí 5 stupňů / s (0,087 radián / s).
ЕврЛекс-2
Угловая скорость каждого колеса
úhlová rychlost každého kola
oj4
Угловая скорость руля направления на всем диапазоне (4): … ° / с
hlová rychlost kormidla v celém rozsahu (4): . .. ° / с
.. ° / с
ЕврЛекс-2
Угловая скорость руля направления на всем диапазоне (14): … ° / с
hlová rychlost kormidla v celém rozsahu (14):… ° / с
ЕврЛекс-2
Можно сказать, что угловая скорость равна изменению угла с течением времени.
Můžeme říci, že úhlová rychlost je rovna změně úhlu za jednotku času.
QED
Допустим, угловая скорость равна омега радианам в секунду.
Úhlová rychlost je rovna omega radiánů za sekundu.
QED
Угловая скорость руля направления во всем диапазоне [52]:… ° / с
hlová rychlost kormidla v celém rozsahu [52]: … ° / с
ЕврЛекс-2
Угловая скорость на каждом колесе
úhlová rychlost každého kola
oj4
Датчики угловой скорости и / или датчики ускорения, разработанные для компьютеров
Čidla úhlové rychlosti a / nebo čidla zrychlení pro použití s počítači
tmClass
Использование SITL — Документация разработчика
В этой статье описывается, как SITL
и MAVProxy можно использовать для изменения среды,
имитировать режимы отказа и настроить автомобиль с дополнительными компонентами.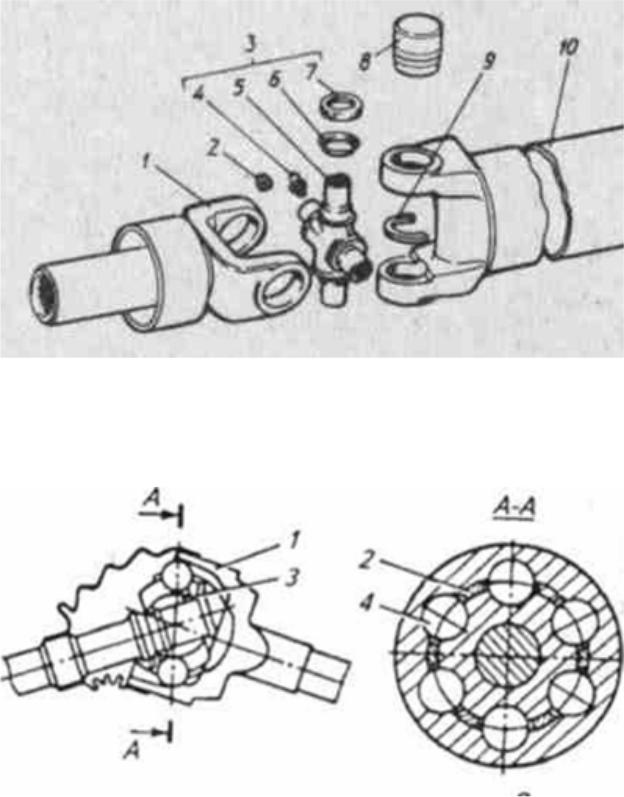 Также объясняется, как подключаться к разным GCS.
Также объясняется, как подключаться к разным GCS.
Подсказка
Если вы только начинаете работать с MAVProxy и SITL, вы можете чтобы начать с чтения учебника Copter SITL / MAVProxy (или аналогичные учебные пособия для других транспортных средств).
Примечание
В этих инструкциях обычно используется MAVProxy к описывать операции (например, установка параметров), потому что он представляет простой и последовательный интерфейс командной строки (устраняет необходимость описывают макет пользовательского интерфейса, специфичный для GCS).Многие из этих операций также могут быть выполнено в Mission Planner (через полный список параметров ) или любом другом GCS.
Сценарий запуска `sim_vehicle.py предоставляется для автоматического создания версии прошивки SITL для текущей ветви кода, загрузки имитационных моделей, запуска симулятора, настройки среды и параметров транспортного средства, а также запуска MAVProxy GCS. Можно указать многие параметры запуска скрипта, введите полный список:
Можно указать многие параметры запуска скрипта, введите полный список:
Выбор типа автомобиля / рамы
Моделирование по умолчанию будет соответствовать типу транспортного средства в каталоге, в котором оно запущено.Вы можете выбрать тип транспортного средства, если начнете с каталога ardupilot, запустив симулятор, вызвав sim_vehicle.py с параметром -v .
sim_vehicle.py -v ArduPlane --console --map
Тип кадра также можно изменить с помощью параметра -f .
sim_vehicle.py -v ArduPlane -f quadplane --console --map
Типы кадров:
Частичный список типов фреймов показан ниже. Чтобы увидеть текущий список, просто введите:
| Автомобиль | Тип рамы |
| Самолет | плоскость (по умолчанию, если -f не используется) |
| квадроцикл светлячки самолет-спойлеры самолет-элевон самолет-реактивный самолет-хвостовик vtail quadplane-cl84 квадроцикл-тильтвек квадроцикл-тилтри квадроцикл квадроцикл-три | |
| Коптер | quad (по умолчанию, если -f не используется) |
| коаксиальный коптер додека-гекса вертолетная база heli-dual hexa hexa-cwx гекса-джи окта окта-cwx окта-джи окта-квад octaquad-cwx tri cwx одиночный коптер y6 djix | |
| Ровер | ровер (по умолчанию, если -f не используется) |
| балансировочный робот-вездеход парусная лодка парусная лодка с мотором | |
Примечание
Важно выбрать правильный тип кадра. Это не только загружает правильный набор параметров, но и выбирает правильную физическую модель. В реальной жизни, например, вы можете настроить и настроить прошивку ArduPlane для любой Quadplane, но вы не можете сделать это в SITL, не выбрав точный тип кадра QuadPlane для симуляции, чтобы получить правильную физическую модель.
Это не только загружает правильный набор параметров, но и выбирает правильную физическую модель. В реальной жизни, например, вы можете настроить и настроить прошивку ArduPlane для любой Quadplane, но вы не можете сделать это в SITL, не выбрав точный тип кадра QuadPlane для симуляции, чтобы получить правильную физическую модель.
Установка начального местоположения автомобиля
Вы можете запустить симулятор с автомобилем в определенном месте,
вызов sim_vehicle.py с параметром -L и именованным
расположение в
ardupilot / Инструменты / автотест / местоположения.текст
файл.
Например, чтобы запустить Copter в Ballarat (названное место в locations.txt ) звоните:
cd ArduCopter sim_vehicle.py -L Балларат --console --map
Примечание
Вы можете добавить в файл свои собственные местоположения. Порядок: Lat, Lng, Alt, Heading, где alt — это MSL в метрах, а направление — в градусах. Если место полета хорошо используется, рассмотрите возможность добавления его в проект с помощью запроса на вытягивание.
Если место полета хорошо используется, рассмотрите возможность добавления его в проект с помощью запроса на вытягивание.
Примечание
Вы можете добавить свои личные местоположения в локальные местоположения.текст
файл в том же формате, что и основной файл. В linux файл
расположен в $ HOME / .config / ardupilot / locations.txt — вы
нужно создать этот файл с помощью вашего любимого текстового редактора.
Моделирование бортового OSD
При запуске SITL вы можете настроить отображение встроенного OSD, если автопилот его включает. Добавьте параметр --osd при запуске SITL:
sim_vehicle.py -v ArduPlane --console --map --osd
Примечание
эмуляция OSD отображает элементы и расположение панелей OSD, но не позволяет использовать несколько экранов и единицы измерения, кроме метрики
Загрузка набора параметров
При первом запуске SITL устройство может быть настроено с
«Неумолимые» параметры.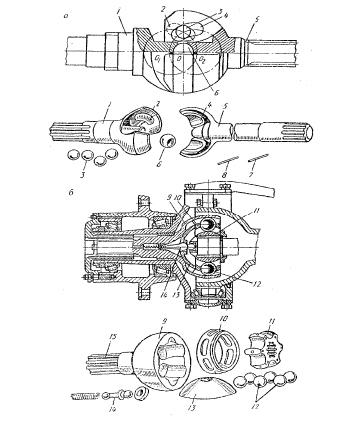 Обычно вам нужно заменить их на
значения, имитирующие более реалистичные условия транспортного средства и окружающей среды.
Полезные наборы параметров представлены в источнике автотестов для
Вертолет,
Самолет,
и
Ровер.
Обычно вам нужно заменить их на
значения, имитирующие более реалистичные условия транспортного средства и окружающей среды.
Полезные наборы параметров представлены в источнике автотестов для
Вертолет,
Самолет,
и
Ровер.
Подсказка
Это нужно сделать только один раз, после загрузки параметры хранится в смоделированной EEPROM.
Команды MAVProxy для загрузки параметров для коптера, ровера и самолета (при условии, что текущий рабочий каталог — это каталог транспортного средства, например / ardupilot / ArduCopter / ) показаны ниже:
параметр нагрузки.. \ Инструменты \ autotest \ default_params \ copter.parm
загрузка параметров .. \ Tools \ autotest \ default_params \ plane.parm
загрузка параметров .. \ Tools \ autotest \ default_params \ rover.parm
Вы можете повторно загрузить параметры позже, если захотите, или вернуться к
параметры по умолчанию, запустив SITL ( sim_vehicle.py ) с -w флаг.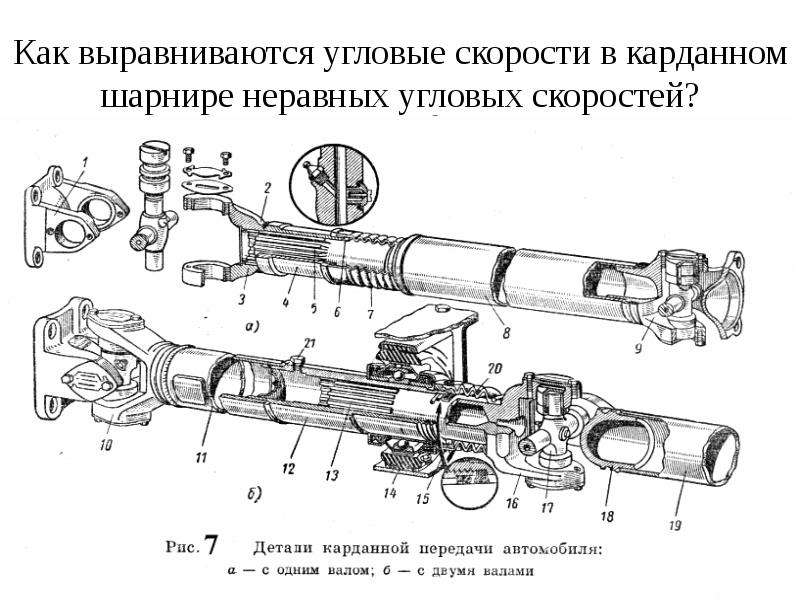
Параметры также можно сохранять. Например, чтобы сохранить параметры в текущий рабочий каталог вы можете сделать:
сохранение параметров./myparams.parm
Настройка параметров
Многие из следующих задач включают установку значений параметров сверх
MAVLink, который вы делаете с помощью команды param set , как показано:
param set PARAMETERNAME VALUE
Все доступные параметры могут быть перечислены с помощью param show . В
Параметры, относящиеся к SITL, начинаются с SIM_ и могут быть получены с помощью:
Подсказка
Таблицу настраиваемых пользователем параметров SITL можно найти в SITL.cpp При изменении параметра значение остается в виртуальной EEPROM. после перезапуска SITL. Не забудьте вернуть его обратно, если он вам не нужен больше (или перезагрузите / сбросьте параметры).
Тестирование отказоустойчивого RC
Чтобы проверить поведение ArduPilot при потере пульта дистанционного управления (RC),
установите параметр SIM_RC_FAIL = 1 , как показано:
Имитирует полную потерю RC-входного сигнала. Если ты просто хочешь
имитировать низкий газ (ниже уровня отказоустойчивости дроссельной заслонки), тогда вы можете сделать
что с командой RC:
Если ты просто хочешь
имитировать низкий газ (ниже уровня отказоустойчивости дроссельной заслонки), тогда вы можете сделать
что с командой RC:
Тестирование сбоя GPS
Чтобы проверить потерю блокировки GPS, используйте SIM_GPS_DISABLE :
набор параметров SIM_GPS_DISABLE 1
Вы также можете включить / отключить второй GPS с помощью SIM_GPS2_DISABLE .
Проверка воздействия вибрации
Чтобы проверить реакцию автомобиля на вибрацию, используйте SIM_ACC_RND . В
пример ниже добавляет шум ускорения 3 м / с / с:
Проверка воздействия ветра
Направление, скорость и турбулентность ветра можно изменить, чтобы проверить их влияние на поведение в полете. Следующие настройки изменяют ветер так что он летит на юг со скоростью 10 м / с.
набор параметров SIM_WIND_DIR 180 набор параметров SIM_WIND_SPD 10
Для просмотра других параметров ветра выполните:
Добавление стабилизатора
SITL может имитировать виртуальный стабилизатор.
Примечание
Симуляция подвеса заставляет SITL начать отправку MOUNT_STATUS Сообщения. Эти сообщения содержат ориентацию в соответствии с последним команды, отправленные на стабилизатор, а не фактические измеренные значения. В результате это возможно, что истинное положение кардана не будет совпадать — т.е. команда может быть проигнорирована или подвес может быть перемещен вручную. Изменения не отображаются в Планировщике миссий.
Сначала запустите симулятор и используйте следующие команды для настройки подвес:
# Укажите крепление на сервоприводе: набор параметров MNT_TYPE 1 # Установите выход RC 6 как сервопривод панорамирования: набор параметров RC6_FUNCTION 6 # Установите выход RC 8 как сервопривод рулона: набор параметров RC7_FUNCTION 8
Затем остановитесь и повторно запустите SITL с флагом -M :
Добавление дальномера
SITL может имитировать аналоговый дальномер, что очень полезно для
разработка режимов полета, позволяющих использовать дальномер. Для настройки используйте
следующие команды:
Для настройки используйте
следующие команды:
набор параметров SIM_SONAR_SCALE 10 набор параметров RNGFND1_TYPE 1 набор параметров RNGFND1_SCALING 10 набор параметров RNGFND1_PIN 0 набор параметров RNGFND1_MAX_CM 5000 набор параметров RNGFND1_MIN_CM 0 # Включить дальномер для посадки (только самолет!) набор параметров RNGFND_LANDING 1
Приведенные выше команды настраивают аналоговый дальномер с максимальным диапазоном 50 метров (50 м поступает от аналогового диапазона напряжения от 0 до 5 В, и масштабирование 10). После внесения вышеуказанных изменений вам необходимо перезапустить SITL.
Затем, чтобы проверить это, попробуйте следующее:
График загрузки модуляГрафик RANGEFINDER.distance
Тогда попробуйте полет и посмотрите, показывает ли вам график дальномер расстояние.
Подсказка
Вы также можете использовать следующие команды для построения графика дальномера информация (определенная как псевдонимы MAVProxy ):
-
grangealt— график дальномерного расстояния и относительной высоты.
-
grangev— дальномер -
grange— график rangefinder_roll

Добавление оптического датчика потока
Можно добавить виртуальный оптический датчик потока, чтобы включить дальномер (см. «Добавление дальномера» выше), а затем установить следующие параметры:
набор параметров SIM_FLOW_ENABLE 1 набор параметров FLOW_TYPE 10
Затем перезапустите SITL.После настройки попробуйте следующее:
График загрузки модуляграфик OPTICAL_FLOW.flow_comp_m_x OPTICAL_FLOW.flow_comp_m_y
Отправляйтесь в полет и посмотрите, получите ли вы достоверные данные.
Добавление датчика оборотов
Вы можете добавить датчик оборотов следующим образом:
Это позволяет отображать и регистрировать скорость вращения вашего виртуального двигателя.
Добавление кодировщиков колес
Вы можете протестировать два виртуальных кодировщика колеса следующим образом:
набор параметров AHRS_EKF_TYPE 3 набор параметров EK2_ENABLE 0 набор параметров EK3_ENABLE 1 выборка параметров набор параметров EK3_SRC1_POSXY 0 набор параметров EK3_SRC1_VELXY 7 набор параметров EK3_SRC1_VELZ 0 набор параметров GPS_TYPE 0 набор параметров WENC_TYPE 10 выборка параметров набор параметров WENC_POS_Y 0.
 075
набор параметров WENC2_TYPE 10
набор параметров WENC2_POS_Y -0.075
набор параметров ARMING_CHECK 60918 (для отключения проверки GPS)
075
набор параметров WENC2_TYPE 10
набор параметров WENC2_POS_Y -0.075
набор параметров ARMING_CHECK 60918 (для отключения проверки GPS)
Перезапустите SITL и щелкните правой кнопкой мыши по карте и выберите «Установить исходную точку (с высотой)», и транспортное средство должно появиться на карте. Также может быть полезно ввести «набор карт showimpos 1», чтобы было видно фактическое положение автомобиля.
Добавление радиомаяков
Вы можете протестировать маяки виртуальной дальности, установив следующие параметры
набор параметров AHRS_EKF_TYPE 3 набор параметров EK2_ENABLE 0 набор параметров EK3_ENABLE 1 выборка параметров набор параметров EK3_GPS_TYPE 3 набор параметров GPS_TYPE 0 набор параметров BCN_TYPE 10 выборка параметров набор параметров BCN_LATITUDE -35.363261 набор параметров BCN_LONGITUDE 149.165230 набор параметров BCN_ALT 584
Перезапустите SITL, и автомобиль должен появиться на карте. Примерно через 30 секунд он должен вернуться в нормальное начальное положение.
Проверка точности посадки
Примечание
Эти инструкции написаны для ArduCopter
.Включите Precision Landing и установите тип серверной части Precision Landing на SITL:
набор параметров PLND_ENABLED 1 выборка параметров набор параметров PLND_TYPE 4
В настоящее время для точной посадки требуется дальномер.Включить имитацию дальномера:
набор параметров RNGFND_TYPE 1 набор параметров RNGFND_MIN_CM 0 набор параметров RNGFND_MAX_CM 4000 набор параметров RNGFND_PIN 0 набор параметров RNGFND_SCALING 12.12
Перезапустите моделирование.
Взлет и немного полететь, затем переключиться на землю:
рычаг дроссельной заслонки RC 3 1800 режим земли RC 3 1500
Проверьте журналы на наличие сообщений о точной посадке:
Выбери самого младшего, затем:
mavlogdump --type PL logs /
Тестирование Vicon (также известное как Vision Positioning)
Запуск SITL, параметры очистки:
.
 /Tools/autotest/sim_vehicle.py -v ArduCopter --gdb --debug -w
/Tools/autotest/sim_vehicle.py -v ArduCopter --gdb --debug -w
Включите EKF3, отключите GPS и установите протокол Serial5 на mavlink, чтобы принимать сообщения с оценкой положения и скорости обзора:
набор параметров AHRS_EKF_TYPE 3 набор параметров EK2_ENABLE 0 набор параметров EK3_ENABLE 1 выборка параметров набор параметров EK3_GPS_TYPE 3 набор параметров GPS_TYPE 0 набор параметров VISO_TYPE 1 набор параметров SERIAL5_PROTOCOL 2 выборка параметров
Перезапустите моделирование, подключив смоделированную систему Vicon к uartF (что соответствует SERIAL5 ):
../Tools/autotest/sim_vehicle.py --map --console -A "--uartF = sim: vicon:"
Консоль должна показать отсутствие GPS:
Оценка положения Vision теперь должна быть загружена в ArduCopter:
STABILIZE> статус VICON_POSITION_ESTIMATE
СТАБИЛИЗАЦИЯ> 43371: VICON_POSITION_ESTIMATE {usec: 38380000, x: 0,0, y: 0,0, z: -0,0999755859375, крен: 0,0, шаг: 0,0, рыскание: -0,122173137963}
Вы также должны получить стартовое сообщение от EKF:
APM: EKF3 IMU0 использует внешние данные навигации APM: начальное положение EKF3 IMU0 NED = 0.
 0,0.0, -0.1 (м)
APM: EKF3 IMU1 использует внешние навигационные данные
APM: EKF3 IMU1 начальное положение NED = 0,0,0,0, -0,1 (м)
0,0.0, -0.1 (м)
APM: EKF3 IMU1 использует внешние навигационные данные
APM: EKF3 IMU1 начальное положение NED = 0,0,0,0, -0,1 (м)
Используйте пункт контекстного меню MAVProxy, щелкнув правой кнопкой мыши на Set Origin (with alt)
Плечо в стабилизацию, переключение в режим ожидания:
режим стабилизации рычаг дроссельной заслонки режим бездельничанья
Взлететь, потом куда-то лететь:
Подождите немного, обратите внимание на движущийся автомобиль на карте.
Сейчас RTL:
RC 3 1500 RC 2 1500 режим RTL
Отметить автомобиль, возвращающийся домой
Доступ к файлам журнала
SITL поддерживает как блоги, так и журналы DF (как и другие типы ArduPilot). порты).Журналы DF хранятся в подкаталоге «logs» в каталоге где вы начинаете SITL. Вы также можете получить доступ к журналам DF через MAVLink, используя GCS, но прямой доступ к ним в каталоге logs / обычно более удобно.
Для систематизации блогов рекомендуется запускать SITL с помощью
Опция «–НАЗВАНИЕ ВС». Это создаст подкаталог с именем NAME
Журналы полетов будут организованы по дате. Каждый рейс получит свой
собственный каталог и будет включать параметры полета плюс любые
загруженные путевые точки и точки сбора.
Это создаст подкаталог с именем NAME
Журналы полетов будут организованы по дате. Каждый рейс получит свой
собственный каталог и будет включать параметры полета плюс любые
загруженные путевые точки и точки сбора.
Отображение состояния транспортного средства
MAVProxy позволяет создавать графики входов, выходов, внутренних переменных и т. Д. Путем загрузки модуля graph . Затем вы можете создавать графики состояния автомобиля с помощью команды graph. Например, чтобы построить график входного сигнала RC-канала 3 во время моделирования:
график RC_CHANNELS.channel3_raw
Как и большинство команд, вы можете ввести graph и затем двойную вкладку, чтобы увидеть доступные завершения. В приведенном выше примере группа RC_CHANNELS содержит 16 каналов RC, поэтому, набрав graph RC_CHANNELS , они отобразятся на двойной вкладке.
Так как они довольно длинные для ввода, MAVProxy позволяет создавать более короткие псевдонимы. Было создано множество псевдонимов в файле, находящемся в дереве исходных текстов ArduPilot в подкаталоге Tools / vagrant под названием mavinit.scr . Если этот файл скопировать и поместить в ваш домашний каталог и переименовать в .mavinit.scr , он будет использован при инициализации MAVProxy . Распространенными являются: g для графика, grc для построения графиков входов RC, gservo8 для построения графика первых 8 выходных каналов вместо восьмикратного ввода длинных имен элементов и т. Д.Использование этого файла инициализации псевдонима также имеет то преимущество, что модуль графика автоматически загружается при запуске, поэтому вам не придется его загружать.
Было создано множество псевдонимов в файле, находящемся в дереве исходных текстов ArduPilot в подкаталоге Tools / vagrant под названием mavinit.scr . Если этот файл скопировать и поместить в ваш домашний каталог и переименовать в .mavinit.scr , он будет использован при инициализации MAVProxy . Распространенными являются: g для графика, grc для построения графиков входов RC, gservo8 для построения графика первых 8 выходных каналов вместо восьмикратного ввода длинных имен элементов и т. Д.Использование этого файла инициализации псевдонима также имеет то преимущество, что модуль графика автоматически загружается при запуске, поэтому вам не придется его загружать.
Использование джойстика
Может быть полезно использовать джойстик для ввода в SITL. Джойстик может
быть настоящим RC-передатчиком с USB-ключом для порта тренера, или
что-то вроде контроллера связи RealFlight или широкий спектр
другие устройства-джойстики.
Перед использованием поддержки джойстика может потребоваться удалить отладку операторы из драйвера джойстика python-pygame в Linux.Если вы этого не сделаете тогда вы можете увидеть много отладочных данных, например:
Значение SDL_JoystickGetAxis: -32768:
Чтобы удалить эту строку отладки, выполните следующую команду:
sudo sed -i 's / SDL_JoystickGetAxis value / \ x00DL_JoystickGetAxis value / g' /usr/lib/python2.7/dist-packages/pygame/joystick.so
, обратите внимание, что это должна быть одна длинная командная строка. Игнорируйте строку упаковка в вики. Если вы установили поддержку джойстика, следуя инструкциям по настройке среды построения кода ArduPilot, то это, вероятно, НЕ потребуется.
Затем для использования джойстика запустите:
Если вы хотите добавить поддержку нового типа джойстика, вам необходимо добавить для него файл, следуя этим инструкциям. Обратите внимание, что вы также можете использовать эту информацию для настройки работы джойстика, если он уже поддерживается. Просто измените его соответствующим образом.
Просто измените его соответствующим образом.
Использование реальных последовательных устройств
Иногда полезно использовать в SITL реальное последовательное устройство. Это делает можно подключить SITL к настоящему GPS для драйвера устройства GPS разработки или подключите его к реальному устройству OSD для тестирования OSD.
Чтобы использовать реальное последовательное устройство, вы можете использовать такую команду:
sim_vehicle.py -A "--uartB = uart: / dev / ttyUSB0" --console --map
что это значит, он передает аргумент –uartB коду ardupilot, сообщая ему использовать / dev / ttyUSB0 вместо обычного внутреннего симулированного GPS для 2-го UART. Вы можете найти сопоставление последовательных портов SITL здесь
Любой из 5 UART может быть сконфигурирован таким образом, используя uartA для uartE. Стандартные последовательные порты SERIAL1 и SERIAL2 — это uartC и uartD соответственно.
Обычно последовательные устройства могут быть подключены к USB-порту компьютера через
адаптер FTDI, но обратите внимание, что они обычно не поддерживают полудуплекс. Чтобы общаться с устройствами таким образом, вы должны убедиться, что ваш
пользователь имеет соответствующий доступ в системах типа linux к группе dialout. На
WSL также обычно необходимо настроить порт после подключения устройства.
прежде чем пытаться взаимодействовать с ним через SITL. Например для COM22:
Чтобы общаться с устройствами таким образом, вы должны убедиться, что ваш
пользователь имеет соответствующий доступ в системах типа linux к группе dialout. На
WSL также обычно необходимо настроить порт после подключения устройства.
прежде чем пытаться взаимодействовать с ним через SITL. Например для COM22:
stty -F / dev / ttyS22 необработанный 115200
Вы можете установить дополнительные параметры для uart в строке подключения, например, чтобы использовать устройство на SERIAL1 только на скорости 115 кбод, укажите:
sim_vehicle.py -v ArduCopter -A "--uartC = uart: / dev / ttyUSB0: 115200" --console --map
Аналогично этому, если вы управляли транспортным средством в SITL через Cygwin на Microsoft Windows, и вы хотели отправить вывод MAVLink через подключив радио на COM16 к AntennaTracker, вы можете использовать такую команду, как это — обратите внимание, что под Cygwin порты связи — это ttyS, и они начинаются с 0, поэтому 15 эквивалентно COM16:
sim_vehicle.
 py -A "--uartC = uart: / dev / ttyS15" --console --map
py -A "--uartC = uart: / dev / ttyS15" --console --map
Изменение скорости моделирования
Большинство серверных программ симулятора поддерживают изменение скорости при Бег.Просто установите параметр SIM_SPEEDUP по мере необходимости. Значение 1 означает нормальное время настенных часов. Значение 5 означает 5-кратное увеличение в реальном времени. Ценность 0,1 означает 1/10 реального времени.
Проверка калибровки компаса
Быстрый способ проверить калибровку компаса в SITL — воспользоваться «Калибровочная» модель автомобиля. Чтобы использовать это с самолетом, сделайте следующее:
sim_vehicle.py -D -f plane --model Calibration --console --map
, затем сделайте:
Это заставит автомобиль двигаться в «танце компаса».Вы можете начать калибровку компаса, чтобы проверить изменения в калибраторе код. Может быть полезно использовать это в сочетании с параметром SIM_SPEEDUP.
Модуль калибровочной машины также имеет множество других функций. Видеть
http://guludo.me/posts/2016/05/27/compass-calibration-progress-with-geodesic-sections-in-ardupilot/
для подробностей.
Видеть
http://guludo.me/posts/2016/05/27/compass-calibration-progress-with-geodesic-sections-in-ardupilot/
для подробностей.
Подключение других / дополнительных наземных станций
SITL может подключаться к нескольким наземным станциям с помощью MAVProxy для пересылать пакеты UDP на сетевой адрес GCS.В качестве альтернативы SITL может подключиться к GCS через TCP / IP без использования MAVProxy .
Чтобы запустить SITL без запуска MAVProxy, используйте параметр --no-mavproxy . SITL будет
ожидание подключения станции GGS через UDP-порт 14550 или TCP-порт 5760.
SITL с MAVProxy (UDP)
SITL может подключаться к нескольким наземным станциям с помощью MAVProxy для
пересылать UDP-пакеты на сетевой адрес GCS (например, пересылка
на другой компьютер с Windows или планшет Android в вашей локальной сети).В
смоделированным транспортным средством можно управлять и просматривать через любое прикрепленное
GCS.
Сначала найдите IP-адрес машины, на которой запущен GCS. Как ты получаешь адрес зависит от платформы (в Windows вы можете использовать «ipconfig» команда, чтобы найти адрес компьютера).
Предполагая, что IP-адрес GCS — 192.168.14.82, вы должны добавить это адрес / порт как выход MAVProxy , используя:
Выходдобавить 192.168.14.82:14550
Затем GCS будет подключаться к SITL, прослушивая этот порт UDP.В метод подключения будет зависеть от GCS (ниже мы покажем, как подключиться для Mission Planner).
Подсказка
Если вы запускаете GCS на той же машине , что и SITL, тогда
соответствующий вывод может уже существовать. Проверьте это, позвонив по номеру , выход в командной строке MAVProxy :
GUIDED> вывод НАПРАВЛЯЕМЫЕ> 2 выхода 0: 127.0.0.1:14550 1: 127.0.0.1:14551
В этом случае мы можем подключить GCS, работающий на той же машине, к UDP.
порт 14550 или 14551. Мы можем подключить еще один GCS к
оставшийся порт и при необходимости добавьте другие порты.
Мы можем подключить еще один GCS к
оставшийся порт и при необходимости добавьте другие порты.
SITL без MAVProxy (TCP)
Также можно взаимодействовать с SITL через TCP / IP, запустив его используя vehicle_name . elf (например, /ArduCopter/ArduCopter.elf ). MAVProxy не требуется при использовании этого метода.
Запустите файл в Cygwin Terminal , указав исходную позицию и модель автомобиля, как показано ниже:
$./ArduCopter.elf --home -35,149,584,270 --модель квадроцикла Стартовала модель квадроцикла на -35 149 584 270 при скорости 1.0. Стартовый скетч 'ArduCopter' Запуск ввода SITL привязать порт 5760 для 0 Последовательный порт 0 на TCP-порту 5760 Жду подключения ....
Выходные данные команды показывают, что вы можете подключиться к SITL с помощью TCP / IP на сетевой адрес машины . SITL работает на на порту 5760.
Подсказка
ArduCopter.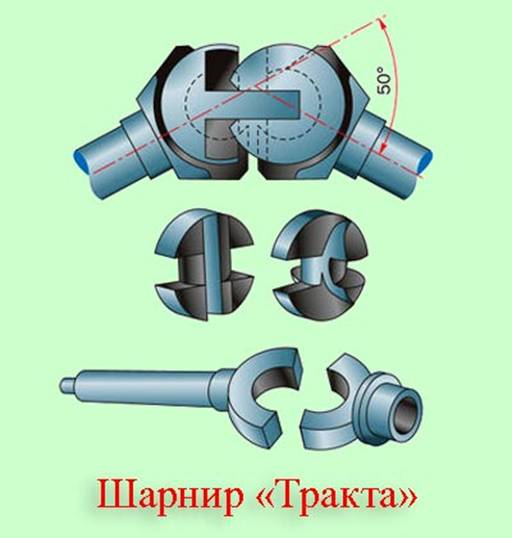 elf имеет другие параметры запуска, которые вы можете использовать
используя параметр командной строки -h:
elf имеет другие параметры запуска, которые вы можете использовать
используя параметр командной строки -h:
Подключение к Планировщику миссий (TCP)
Сначала настройте SITL для использования с TCP.
В Mission Planner подключитесь к SITL, выбрав TCP , а затем Подключить кнопку . Введите удаленный хост и удаленный порт машина работает под управлением SITL. Планировщик миссий подключится и может быть используется так же, как и раньше.
Подсказка
Если SITL работает на том же компьютере, что и Mission Planner , вы можете щелкните по подсказкам удаленного хоста и удаленного порта как эти по умолчанию правильные значения.
Mission Planner: подключение к SITL с помощью TCP
PPT — Найдите угловую скорость шестерни F с учетом угловой скорости в A PowerPoint Presentation
Как решить эту проблему? Найдите угловую скорость шестерни F с учетом угловой скорости в точке A Виртуальные и физические манипуляторы в динамике
Влияние виртуальных и физических манипуляций на способности студентов изучать динамику в программе бакалавриата по машиностроению 02. 10.2012 Эдвард Пэн Университет Вирджинии
10.2012 Эдвард Пэн Университет Вирджинии
Повестка дня • Введение • Проблема • Вопросы исследования • Значимость • Теоретическая основа • Визуализации и манипуляции • Обучение динамике • Контекст и участники • Дизайн исследования • Инструменты и данные • Анализ • Ожидаемые результаты • Бюджет, оборудование, временные рамки Виртуальные и физические манипуляторы в динамике
Введение • STEM-образование в национальном масштабе • Инженерное образование должно адаптироваться • Технологии для аутентичной практики • 3D-печать • CAD • Необходимость помогать нетрадиционным студентам • Визуализация ключевых навыков Виртуальный и Физи cal Манипуляторы в динамике
Проблема • Динамика • Базовый курс машиностроения • Изучение ускоренного движения • Кинематика частиц • Кинетика частиц • Кинематика твердого тела • Лекции и решение задач с помощью статических диаграмм • Студенты испытывают трудности с решением задач • Сложность визуализации проблемы может быть причиной Виртуальных и физических манипуляций в динамике
Вопросы для исследования • Как можно сравнить успеваемость учащихся с обучением, дополненным виртуальными манипуляциями, инструктажем, дополненным физическими манипуляциями, и традиционными методами обучения? • Как учащиеся используют статические диаграммы, физические манипуляторы и виртуальные манипуляторы при изучении кинематики твердого тела? • Какие ментальные модели механических систем разрабатывают учащиеся с помощью статических диаграмм, физических манипуляторов и виртуальных манипуляторов? • Что студенты думают о статических диаграммах, физических манипуляторах и виртуальных манипуляторах в качестве учебных пособий? Виртуальные и физические манипуляторы в Dynamics
Значение • Знание того, как студенты учатся с помощью физических и виртуальных манипуляторов • Как студенты изучают динамику • Инженерное образование • Обучающие технологии • Высшее образование • Образование в целом Виртуальные и физические манипуляции в Dynamics
Теоретическая основа • Как люди учатся • Воплощенное познание • Теория когнитивной нагрузки • Ментальные модели • Феноменологические примитивы • Сопоставления • Аналоговое мышление • Механистические ментальные модели Виртуальные и физические манипуляторы в динамике
Визуализации и визуализации • Как правило, поддерживают учащихся с более низкой успеваемостью и более низкими пространственными способностями • Обманчивая ясность и иллюзия глубины объяснения • Физические манипуляторы • Виртуальные манипуляторы • Смешанные результаты Виртуальные и физические манипуляторы в динамике
Dynamics Educati на • Дополнительные компьютерные инструкции • Компьютерное проектирование • Виртуальные среды • Практические занятия • Реструктуризация педагогических подходов Виртуальные и физические манипуляторы в динамике
Контекст и участники • MAE 2320 (динамика), семестр весны 2013 года в UVA • 150-170 студентов • Лекция: 2x 1:15 • Лабораторная работа: 1x 2:00 Виртуальные и физические манипуляторы в динамике
Дизайн исследования • Квазиэкспериментальная со стратифицированной выборкой • Группы лечения: • Традиционные: лекция + статические диаграммы • Физический: лекция + статические диаграммы + физические манипуляции • Виртуальный: лекция + статические диаграммы + виртуальные манипуляторы Виртуальные и физические манипуляторы в динамике
Дизайн исследования: Процедура • Предварительное тестирование • Лечение: 4 секционных сеанса по 20 м для решения 1 составная задача ea. • Абсолютная • Относительная скорость • Мгновенные центры и относительное ускорение • Вращающиеся оси • Посттест и анкета Виртуальные и физические манипуляторы в динамике
• Абсолютная • Относительная скорость • Мгновенные центры и относительное ускорение • Вращающиеся оси • Посттест и анкета Виртуальные и физические манипуляторы в динамике
Инструменты и данные • Пре / посттест • DCI • PSVT • Анкета • Видеозаписи Виртуальные и физические манипуляторы in Dynamics
Анализ Виртуальные и физические манипуляторы в динамике
Ожидаемые результаты • Нет разницы • Виртуальные и физические выгоды низкоэффективные, не влияют на высокопроизводительные • Виртуальные и физические травмы низкоэффективных, не влияют на высокопроизводительные виртуальные и физические манипуляторы в динамике
Бюджет Виртуальные и физические манипуляторы в динамике
Другое оборудование Виртуальные и физические манипуляторы в динамике
Временная шкала Виртуальные и физические манипуляции в динамике 900 07
Выводы • Динамика затруднена, возможно, именно поэтому визуализация • Физические и виртуальные манипуляторы могут помочь учащимся визуализировать механические системы • Скорее всего, принесут пользу учащимся с низкими пространственными способностями или низкой успеваемостью, если вообще • Может вообще не иметь влияют или даже вредят способности учащихся к визуализации • Это исследование заслуживает изучения Виртуальные и физические манипуляторы в динамике
Вопросы? Виртуальные и физические манипуляторы в динамике
