Как сделать регулятор оборотов: Как сделать регулятор оборотов для болгарки своими руками: как сбавить обороты
Как сделать регулятор оборотов для болгарки своими руками: как сбавить обороты
Электроинструмент в нашей мастерской занимает одно из главных мест. Все функции каждое электрическое устройство выполняет согласно техническим данным. Что хотелось бы еще? Очень хочется, чтобы инструмент подольше не выходил из строя или не ломался вообще. Как человек привыкает к другу – собаке, так он привыкает и к инструменту.
Один из основных инструментов – угловая шлифовальная машина, которую мы называем болгаркой. Это универсальный инструмент, который способен резать, шлифовать, очищать поверхность, пилить доски и еще ко многим операциям ее можно приспособить.
Плавный пуск и регулировка оборотов вращения + (Видео)
Плавный пуск электроинструмента – главный залог его долголетия. Вспомните, когда перегорает электрическая лампочка? Чаще всего в момент включения. Потому что после подключения к электрической сети резко возрастает нагрузка. Подработанные места спирали не выдерживают и она перегорает.
Такие же процессы протекают и в болгарке. В момент включения ток резко возрастает, потому что движущим силам надо не просто сдвинуть якорь с места, но еще и быстро набрать нужные обороты. Эффект от такого жесткого пуска может быть самый плачевный – обрыв обмотки.
Чтобы снизить вероятность выхода из строя инструмента из-за жесткого пуска необходимо доработать болгарку и снабдить ее небольшим встроенным устройством плавного пуска.
Еще одна доработка – регулятор вращения. Из собственной практики каждый знает, как неудобно работать с инструментом, который не имеет регулировки вращения. Если в электродрели нет такого приспособления, то трудно подобрать скорость вращения и подачу сверла. Это приводит либо к заклиниванию сверла, либо к его поломке.
Аналогично работает токарный станок, в котором существует целый набор специальных шестерен для регулировки вращения шпинделя. От этого во многом зависит не только сохранность резца, но и качество обработки материала.
Объединить в себе два достоинства – плавный пуск и регулировку оборотов вала можно с помощью электронной схемы.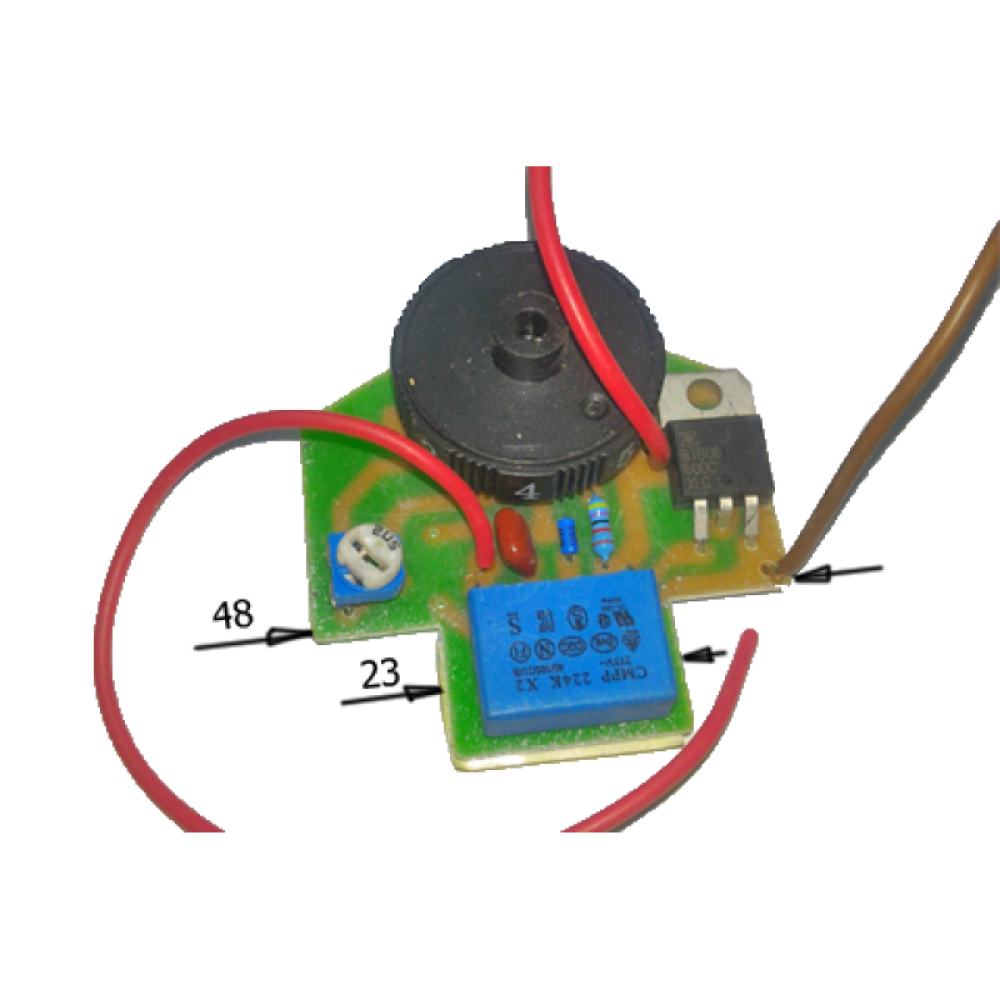 Ее вполне можно собрать своими руками и установить прямо в корпус машины. С такой схемой она будет плавно запускаться, не создавая перегрузок в обмотках и сети. И с этой же схемой появиться возможность регулировать обороты, чтобы подбирать режим работы с любым материалом.
Ее вполне можно собрать своими руками и установить прямо в корпус машины. С такой схемой она будет плавно запускаться, не создавая перегрузок в обмотках и сети. И с этой же схемой появиться возможность регулировать обороты, чтобы подбирать режим работы с любым материалом.
Если резать металл со значительной толщиной и твердостью, то необходимо поддерживать большие обороты. Но при обработке поверхностей легкоплавких материалов большая скорость больше навредит, чем поможет делу. Ее надо уменьшить. На большой скорости опасно работать с камнем или кафелем. И здесь ее необходимо сбавить.
Даже при стачивании диска скорость вращения необходимо пропорционально изменять, потому что линейная скорость кромки диска будет уменьшаться. Не обойтись без регулятора оборотов, работая диском с алмазной насечкой, потому что при высокой температуре он очень быстро разрушается.
Все говорит о том, что, если болгарка не имеет регулятора оборотов, то его обязательно надо сделать и установить в машину.
Как изготовить регулятор оборотов своими руками + (Видео)
Чтобы не осложнять восприятие принципа работы сложными терминами, принципиальную работу схемы можно объяснить просто. В ней имеется чувствительный элемент, который считывает величину нагрузки. В зависимости от считанного значения этот элемент управляет запорным устройством.
Принцип действия аналогичен работе водопроводного крана. В данном случае вы являетесь чувствительным элементом, который управляет водопроводным краном. Поток воды в зависимости от необходимости становится то больше, то меньше. Тот же процесс происходит и с током.
Необходимо правильно понимать тот момент, что мы никак не сможем увеличить скорость вращения больше той, которая указана в характеристике болгарки. Обороты мы можем только понизить. Если максимальные обороты 3000, то диапазон, в котором мы сможем регулировать обороты, будет находиться ниже этого значения.
В простейшем варианте можно использовать схему регулятора на тиристоре. Он будет и чувствовать, и регулировать. Два в одном. Схема эта имеет всего пять деталей. Она очень компакта и легко разместится в корпусе. Такой регулятор не будет работать от нулевого значения оборотов, но это для болгарки и не нужно.
Если в работе нужны более низкие обороты, то необходимо применять другую схему на интегральной микросхеме, где запорным элементом будет симистор. Такая схема сможет регулировать обороты практически от нуля и до нужного значения.
И в той, и в другой схеме основная нагрузка ложится на запорный элемент. Он должен быть рассчитан на напряжение до 600 В и на ток до 12 А. Если ваша шлифовальная машина мощнее 1 кВт, то запорный элемент должен выдерживать нагрузку до 20 А.
Все детали схемы на тиристоре можно разместить на печатной плате или просто навесным монтажом. По второму варианту детали впаиваются на печатной плате. Печатная плата может изготавливаться разными методами. Ее можно вытравить из фольгированного текстолита, можно даже вырезать резаком, но получится очень грубо. В принципе ее можно попросить изготовить знакомого радиолюбителя за весьма скромное вознаграждение.
Ее можно вытравить из фольгированного текстолита, можно даже вырезать резаком, но получится очень грубо. В принципе ее можно попросить изготовить знакомого радиолюбителя за весьма скромное вознаграждение.
В изготовленную печатную плату вставляются радиоэлектронные элементы. Их можно приобрести в специализированных магазинах или на радиорынках. Номиналы каждого не должны отличаться по номиналу и по расчетной мощности. Тиристор или симистор желательно устанавливать на теплоотводе – алюминиевом или медном радиаторе.
Когда готовая плата будет готова, то необходимо выбрать удобное место в корпусе болгарки для ее установки. Установить ее желательно так, чтобы было удобно пользоваться, и чтобы она не мешала в процессе работы.
Перед тем как установить схему в машину ее надо проверить. Для этого вместо болгарки на выход надо подключить обычную лампу накаливания. Подойдет экземпляр мощностью 60 – 40 Вт на 220 В. Работоспособность будет очевидна по изменению свечения накала лампочки.
Теперь остается вмонтировать устройство на выбранное место и произвести пробный пуск болгарки. Она перестанет во время пуска вырываться из ваших рук, а обороты будут плавно регулироваться вращением регулятора.
Как сделать регулятор оборотов для болгарки своими руками
Привет всем любителям самоделок! Сегодня хочу показать, как можно самостоятельно усовершенствовать УШМ сделав для этого регулятор оборотов. В более дорогих моделях его встраивают с завода, а более дешевые можно легко доработать. Так же при помощи этой самоделки, можно регулировать подсветку лампочек накаливания.
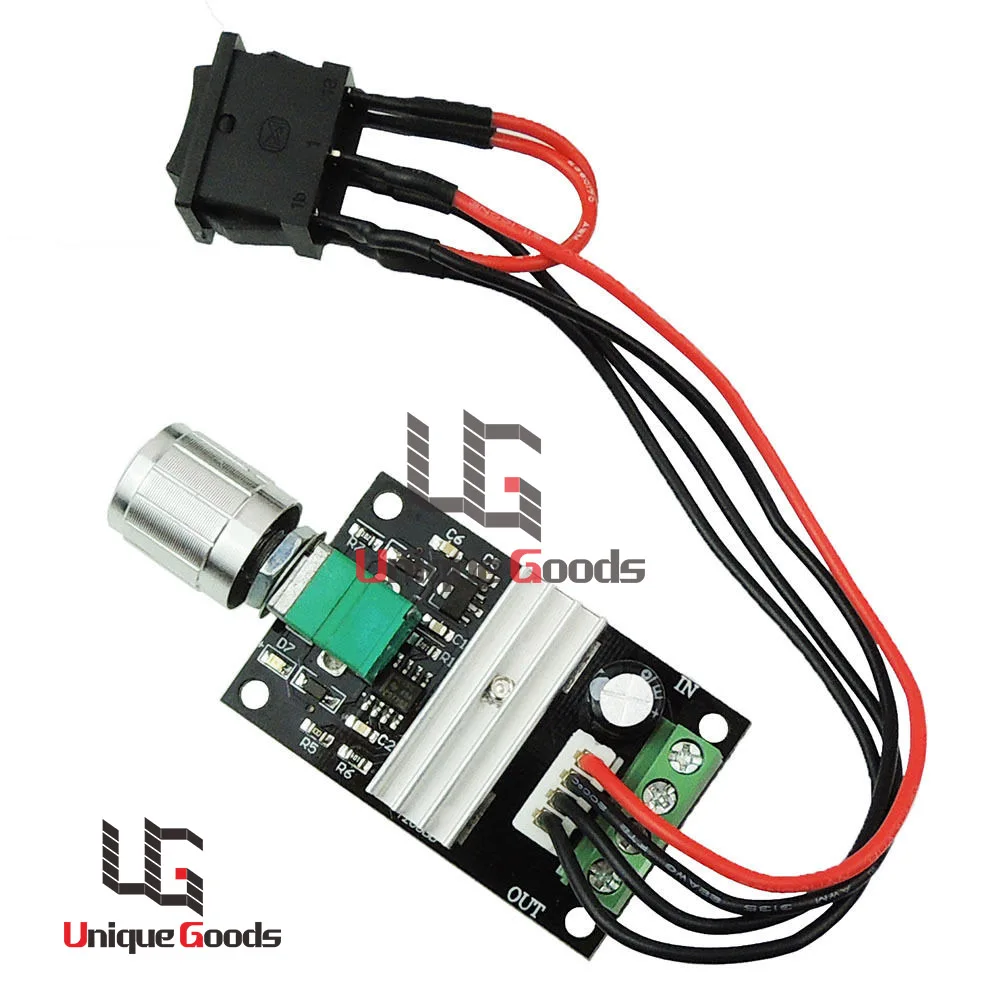
Для изготовления регулятора потребуется уже готовая плата, которую можно легко и недорого купить на китайском сайте, так же они продаются и в магазинах электроники. Выглядят данные платы вот так, как на фото ниже.
Плата регулятора оборотов
Изготовление корпуса для регулятора оборотов
Корпус для данной платы я использовал из двух самых обычных розеток.
 В одной из них вытащил все внутренности и вставил туда плату.
В одной из них вытащил все внутренности и вставил туда плату.
Сбоку пропаял отверстие для вывода регулятора.
Затем приступаем к подключению проводов.
На плате все подписано, куда нужно подводить входное напряжение и откуда будет выходить выходное. Перед подключением провода желательно залудить.
Саму плату я посадил на горячий клей.
Далее подключаем вторую розетку.
Розетки между собой я скрепил на болтиках.
Радиатор платы немного не давал закрыть крышку от розетки и поэтому пришлось выпилить небольшое отверстие и как показала практика, оно еще и будет служить для лучшего охлаждения радиатора, так как в процессе использования от долгой работы он нагревается.
Почти все готово, осталось посадить на место колесико регулятора.
Теперь можно испытать данный регулятор. Для начала подключил обычную лампочку накаливания.
А затем и «болгарку». Работает все отлично и со своей задачей регулятор справляется хорошо. Максимальная нагрузка составляет 2 киловатта, а оптимальная 1,5кв.
Максимальная нагрузка составляет 2 киловатта, а оптимальная 1,5кв.
Видео по изготовлению регулятора оборотов для УШМ
Более наглядно работу регулятора можно посмотреть в видео:
Всем большое спасибо за внимание и до новых самоделок!
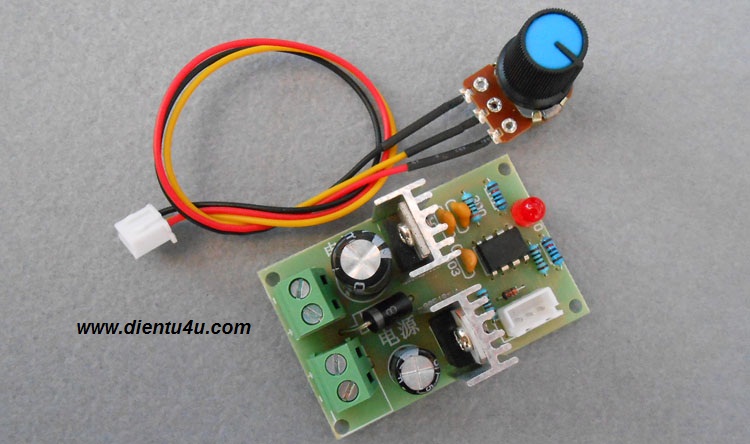
Как сделать простой регулятор оборотов, скорости вращения для компьютерного вентилятора, кулера.
Компьютерные вентиляторы могут быть полезны не только внутри компьютера. Допустим я использую такой вентилятор (размерами 120 на 120 мм, 12 В и 350 мА) для быстрой разморозки своего мини холодильника, а также его вполне хватает для проветривания небольшого помещения, после того как надымил паяльником. Хотя когда такие вентиляторы питаешь от их стандартного напряжения 12 вольт они издают относительно большой шум. Да и не всегда нужны их максимальные обороты вращения. Порой данного кулера хватает и при пониженной мощности. Но чтобы это сделать нам понадобится весьма простая схема (что приведена ниже на рисунке), которая позволит регулировать частоту вращения, его скорость, обороты.
Для бывалых электронщиков и радиотехников эта простая схема ясна и понятна, так что буду пояснять ее работы, принцип действия для новичков. Одно дело когда собрал схему, включил, и пусть себе работает. Другое же дело, когда знаешь как она функционирует, и при желании можно ввести свои какие-нибудь изменения и дополнения к имеющейся схеме.
Итак, сама схема регулятора оборотов компьютерного вентилятора состоит всего из трех деталей, а именно это биполярный транзистор типа КТ817 с любым буквенным индексом, переменного резистора на 1 ком и постоянного резистора, который желательно подобрать наиболее подходящий. Транзистор включен по схеме с общим коллектором (называемым также эмиттерным повторителем), а это значит что он усиливает только ток, при том усиления по напряжению не происходит.
Между коллектором и эмиттером стоит делитель напряжения, состоящий из двух резисторов (переменного и постоянного). Как известно, биполярный транзистор имеет три вывода, это эмиттер, коллектор и база. Переход между базой и эмиттером считается управляющим, а переход между коллектором и эмиттером считается силовым. Так вот, в изначальном состоянии (когда никакого напряжения к схеме не приложено) переход коллектор-эмиттер закрыт, он через себя ток не пропускает, его проводимость в этом состоянии имеет бесконечно большое значение (проще говоря имеет бесконечно большое сопротивление). Но вот когда мы на управляющий переход подадим напряжение более 0,6 вольт, этот силовой переход (коллектор-эмиттер) постепенно начинает открываться. И чем больше мы пропустим тока через управляющий переход, тем больше тока сможет пройти через силовой переход.
Переход между базой и эмиттером считается управляющим, а переход между коллектором и эмиттером считается силовым. Так вот, в изначальном состоянии (когда никакого напряжения к схеме не приложено) переход коллектор-эмиттер закрыт, он через себя ток не пропускает, его проводимость в этом состоянии имеет бесконечно большое значение (проще говоря имеет бесконечно большое сопротивление). Но вот когда мы на управляющий переход подадим напряжение более 0,6 вольт, этот силовой переход (коллектор-эмиттер) постепенно начинает открываться. И чем больше мы пропустим тока через управляющий переход, тем больше тока сможет пройти через силовой переход.
Именно от переменного резистора R1 зависит будет ли силовой переход закрыт (при этом вентилятор вращаться не будет) или же будет он полностью открыт (при этом кулер будет иметь максимальные обороты своего вращения). Естественно, чем больше мы выкрутим ручку переменного резистора, тем сильнее или медленнее будет вращаться наш компьютерный вентилятор (в зависимости в какую сторону мы будем вращать ручку).
И вот чтобы напряжение от 0 до 0,6 вольт убрать с переменного резистора мы и вводим в схему постоянный резистор. Именно он возьмет на себя это самое низкое напряжение «мертвой зоны». В итоге переменный резистор будет работать от максимальных оборотов вентилятора до минимальных. Постоянный резистор R2 нужно подбирать. Лучше вначале вместо него поставить подстроечный резистор с сопротивлением около 470 ом. После того как мы подберем нужное сопротивление «мертвой зоны» можно будет ставить и постоянный, до этого подобранным сопротивлением. Оно будет примерно около 100-300 ом.
Что касается самого транзистора. В этой схеме я поставил КТ817. У него максимальный ток, который может пройти через коллектор-эмиттерный переход равен до 3 ампер. Рассеиваемая мощность без радиатора до 1 ватта, а с наличием охлаждающего радиатора эта мощность уже увеличивается аж до 25 ватт. Можно поставить любой другой биполярный транзистор с n-p-n проводимостью, у которого ток коллектор-эмиттер будет больше того, что будет проходит при использовании конкретного вентилятора. Ну, и рассеиваемая мощность должна быть не меньше той, что будет выделяться при конкретном вентиляторе.
У него максимальный ток, который может пройти через коллектор-эмиттерный переход равен до 3 ампер. Рассеиваемая мощность без радиатора до 1 ватта, а с наличием охлаждающего радиатора эта мощность уже увеличивается аж до 25 ватт. Можно поставить любой другой биполярный транзистор с n-p-n проводимостью, у которого ток коллектор-эмиттер будет больше того, что будет проходит при использовании конкретного вентилятора. Ну, и рассеиваемая мощность должна быть не меньше той, что будет выделяться при конкретном вентиляторе.
Ну, а сама схема работает достаточно просто. Когда мы крутим ручку переменного резистора в сторону уменьшения оборотов вентилятора, то лишнее напряжение отводится на эту транзисторную схему. Проще говоря, лишнюю электрическую мощность на себя забирает эта схема, превращая ее в тепло, которое рассеивается на транзисторе и радиаторе. К сожалению, это является недостатком данной схемы. Ведь при этом не о какой экономии электроэнергии говорить не приходится. Если это для вас важно, то тогда нужно использовать схемы понижающих DC-DC преобразователей, у который с экономией дело обстоит гораздо лучше.
Видео по этой теме:
P.S. Несмотря на простоту этой схемы она действительно способна вполне линейно регулировать частоту вращения компьютерного вентилятора. Хотя к ней можно подключать не только кулер от компа, с маломощными электродвигателями постоянного тока, рассчитанных на напряжение 12 вольт, она также вполне способна работать. Хотя и напряжение 12 вольт не является ограничением, схема будет работать и при больших напряжениях.
Регулятор оборотов минидрели / Хабр
Сверление печатных плат — настоящая головная боль для электронщика, но наше новое устройство поможет ее немного смягчить. Это простое и компактное дополнение к минидрели позволит продлить жизнь двигателю и сверлам. Схема, плата, инструкции по настройке, видео — все в статье!
Для чего нужен регулятор оборотов
Обычно минидрели строятся на базе обычных двигателей постоянного тока. А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
А обороты таких двигателей зависят от нагрузки и приложенного напряжения. В результате на холостых оборотах двигатель раскручивается очень сильно, а в моменты сверления обороты двигателя плавают в большом диапазоне.
Если снижать напряжение на двигателе, когда не нем нет нагрузки, можно добиться увеличения ресурса как свёрл, так и самих двигателей. Кроме того, даже точность сверления повышается. Самый простой способ добиться этого — измерение тока, потребляемого двигателем.
В интернете много схем подобных регуляторов, но большинство из них используют линейные регуляторы напряжения. Они массивные и требуют охлаждения. В соавторстве с TinyElectronicFriends нам захотелось сделать компактную плату на базе импульсного стабилизатора, чтобы она могла быть просто «надета» на двигатель.
Схема
ШИМ-регулятор со встроенным ключом MC34063 регулирует напряжение на двигателе. Напряжение на шунте R7,R9,R11 усиливается операционным усилителем и через компаратор подается на вход обратной связи ШИМ-контроллера.
Если ток меньше определенного значения, то на двигатель подается напряжение, зависящее от настройки сопротивления RV1. То есть на холостых оборотах на двигатель будет подаваться только часть мощности, а подстроечный резистор RV1 позволит отрегулировать обороты при этом.
Если сигнал на выходе ОУ превысит напряжение на компараторе, то на двигатель будет подано полное напряжение питания. То есть при сверлении двигатель будет включаться на максимальную мощность. Порог включения задается резистором RV2.
Для питания ОУ используется линейный стабилизатор.
Все компоненты схемы будут рассеивать очень мало тепла и можно собрать ее полностью на SMD-компонентах. Работать она может при большом диапазоне питающих напряжений (в зависимости от сопротивления R6), не требует контроллеров и датчиков оборотов.
Печатная плата
Вся схема умещается на двухсторонней печатной плате диаметром 30мм. На ней всего несколько штук переходных отверстий и ее легко можно изготовить «в домашних условиях». Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Ниже в статье будут файлы для скачивания файла печатной платы для SprintLaout.
Перечень компонентов
Вот полный список всего, что потребуется для сборки:
- Печатная плата (ссылка на файлы для изготовления в конце статьи)
- U1 — MC34063AD, импульсный стабилизатор, SOIC-8
- U2 — LM358, операционный усилитель, SOIC-8
- U3 — L78L09, стабилизатор, SOT-89
- D1,D3 — SS14, диод Шоттки, SMA — 2шт
- D2 — LL4148, диод выпрямительный, MiniMELF
- C1 — конденсатор, 10мкФ, 50В, 1210
- C2 — конденсатор, 3.3нФ, 1206
- C3,C4 — конденсатор, 4.7мкФ, 1206 — 2шт
- C5 — конденсатор, 22мкФ, 1206
- R1-R3,R7,R9,R11 — резистор 1 Ом, 1206 — 6шт
- R4,R10 — резистор 22кОм, 1206 — 2шт
- R5 — резистор 1кОм, 1206
- R6 — резистор 10-27кОм, 1206. Сопротивление зависит от номинального напряжения используемого двигателя. 12В — 10кОм, 24В — 18кОм, 27В — 22кОм, 36В — 27кОм
- R8 — резистор 390 Ом, 1206
- RV1,RV2 — резистор подстрочный, 15кОм, типа 3224W-1-153 — 2шт
- XS1 — клемма, 2 конт, шаг 3,81мм
Также мы сделали на 3D-принтере кольцо-ограничитель, для удобной установки на двигатель. Ссылка для скачивания STL-файла для скачивания в конце статьи.
Ссылка для скачивания STL-файла для скачивания в конце статьи.
Сборка и настройка
Собирается все достаточно просто. Контактные площадки нарисованы под ручную пайку.
Стоит начинать сборку самой платы с установки всех компонентов на стороне платы без подстроечных резисторов, а затем на обратной стороне. Клемму проще устанавливать в последнюю очередь. Номинал R6 подбирается в соответствии с номинальным напряжением вашего двигателя. В этом устройстве важно контролировать положение ключа на микросхемах и полярность диодов. Все остальные компоненты не полярные.
Между платой и двигателем над установить проставку, чтобы плата не касалась двигателя. Сама плата надевается прямо на ламели двигателя. Несколько раз проверьте полярность подключения двигателя, чтобы он крутился в правую сторону, а затем припаяйте контакты.
Контакты для подачи напряжения, на вход платы подписаны «GND» и «+36V». Минус источника входного напряжения подключается к контакту «GND», а плюс к «+36V». Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Напряжение источника питания должно совпадать с номинальным напряжением двигателя.
Настройка регулятора очень проста:
- Установить резистором RV2 порог срабатывания регулятора на максимум
- Установить резистором RV1 оптимальные обороты двигателя в режиме холостого хода
- Установить резистором RV2 такой порог срабатывания, чтобы при появлении малейшей нагрузки, увеличивалось напряжение на двигателе
Видео
Эффект от использования сложно оценить по видео, но мы теперь всегда сверлим только с регулятором! Требуется лишь немного привыкнуть и следить чтобы сверла были хорошо заточены. И, конечно, его можно в любой момент просто включить на максимум на всегда.
Ссылки
Ссылки для скачивания всех необходимых файлов вы можете найти на
основной странице проекта.
Спасибо за проявленный интерес!
Автоматический регулятор оборотов для мини-дрели
При работе с выводными компонентами приходится изготавливать печатные платы с отверстиями, это, пожалуй, одна из самых приятных частей работы, и, казалось бы, самая простая.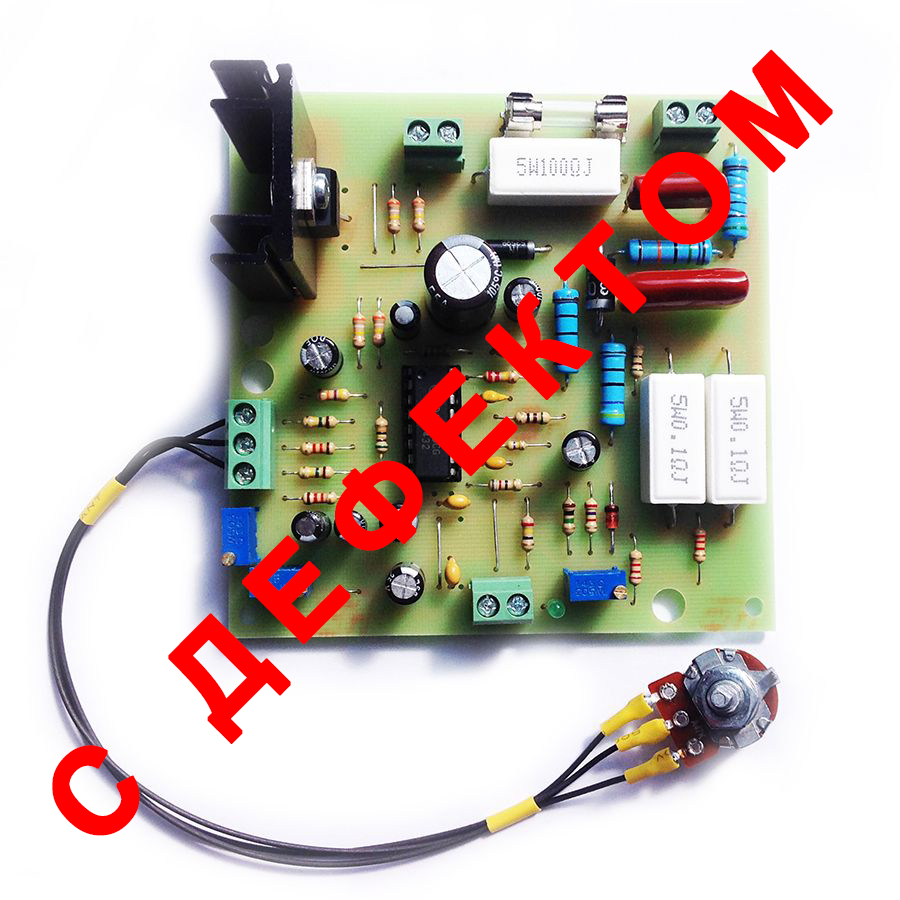 Однако, очень часто при работе микродрель приходится то отложить в сторону, то снова взять ее в руки, чтобы продолжить работу. Микродрель лежащая на столе во включенном состоянии создает довольно много шума из-за вибрации, к тому же она может слететь со стола, а зачастую и двигатели прилично нагреваются при работе на полную мощность. Опять же, из-за вибрации довольно трудно точно прицеливаться при засверливании отверстия и нередко бывает так, что сверло может соскользнуть с платы и проделать борозду на соседних дорожках.
Однако, очень часто при работе микродрель приходится то отложить в сторону, то снова взять ее в руки, чтобы продолжить работу. Микродрель лежащая на столе во включенном состоянии создает довольно много шума из-за вибрации, к тому же она может слететь со стола, а зачастую и двигатели прилично нагреваются при работе на полную мощность. Опять же, из-за вибрации довольно трудно точно прицеливаться при засверливании отверстия и нередко бывает так, что сверло может соскользнуть с платы и проделать борозду на соседних дорожках.
Решение проблемы напрашивается следующее: нужно сделать так, чтобы микродрель имела маленькие обороты на холостом режиме, а при нагрузке частота вращения сверла увеличивалась. Таким образом, нужно реализовать следующий алгоритм работы: без нагрузки – патрон крутится медленно, свело попало в кернение — обороты возросли, прошло насквозь – обороты снова упали. Самое главное, что это очень удобно, к тому же двигатель работает в облегченном режиме, с меньшим нагревом и износом щеток./F036M_(6-90V-15A)-03.JPG)
Ниже приведена схема такого автоматического регулятора оборотов, обнаруженная в интернете и немного доработанная нами для расширения функционала:
Рис.1 — Исходная схема регулятора
После сборки и тестирования выяснилось, что под каждый двигатель приходится подбирать новые номиналы элементов, что совершенно неудобно. Также добавили разрядный резистор (R4) для конденсатора, т.к. выяснилось, что после отключения питания, а особенно при отключённой нагрузке, он разряжается довольно долго. Изменённая схема пробрела следующий вид:
Рис.2 — Доработанная принципиальная схема автоматического регулятора оборотов
Автоматический регулятор оборотов работает следующим образом — на холостых оборотах сверло вращается со скоростью 15-20 оборотов/мин., как только сверло касается заготовки для сверления, обороты двигателя увеличиваются до максимальных. Когда отверстие просверлено и нагрузка на двигатель ослабевает, обороты вновь падают до 15-20 оборотов/мин.
Собранное устройство выглядит следующим образом:
Рис.3 — Собранный автоматический регулятор оборотов
Рис.4 — Вид печатной платы со стороны пайки
На вход подается напряжение от 12 до 35 вольт, к выходу подключается микродрель, после чего резистором R3 выставляется требуемая частота вращения на холостом ходу и можно приступать к работе. Здесь следует отметить, что для разных двигателей регулировка будет отличаться, т.к. в нашей версии схемы был упразднен резистор, который требовалось подбирать для установки порога увеличения оборотов.
Транзистор Т1 желательно размещать на радиаторе, т.к. при использовании двигателя большой мощности он может довольно сильно нагреваться.
Ёмкость конденсатора C1 влияет на время задержки включения и отключения высоких оборотов и требует увеличения если двигатель работает рывками.
Самым важным в схеме является номинал резистора R1, от него зависит чувствительность схемы к нагрузке и общая стабильность работы, к тому же через него протекает почти весь ток, потребляемый двигателем, поэтому он должен быть достаточно мощным. В нашем случае мы сделали его составным, из двух одноваттных резисторов.
В нашем случае мы сделали его составным, из двух одноваттных резисторов.
Печатная плата регулятора имеет размеры 40 х 30 мм и выглядит следующим образом:
Рис.5 — Разводка печатной платы автоматического регулятора оборотов
Скачать рисунок платы в формате PDF для ЛУТ (При печати указывайте масштаб 100%).
Весь процесс изготовления и сборки регулятора для минидрели занимает около часа. После травления платы и очистки дорожек от защитного покрытия (фоторезиста или тонера, в зависимости от выбранного метода изготовления платы) необходимо засверлить в плате отверстия под компоненты. При этом обратите внимание на размеры выводов различных элементов — они могут существенно отличаться.
Рис.6 — Вытравленная печатная плата
Сверлить отверстия рекомендуется со стороны дорожек, а для того, чтобы компоненты было легче устанавливать – со стороны деталей все отверстия необходимо немного раззенковать сверлом большего диаметра (3-4 мм).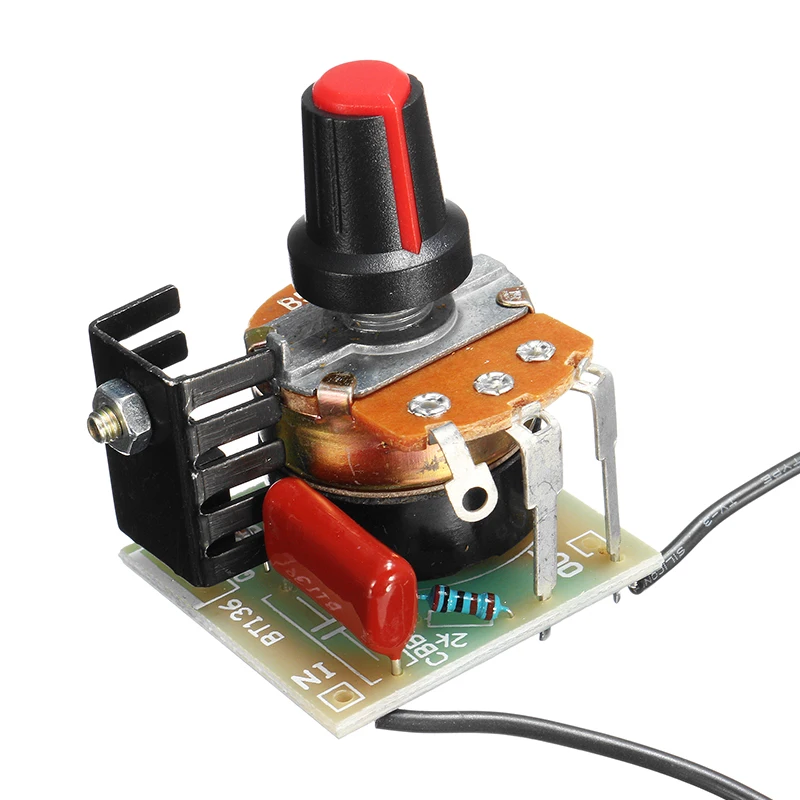
Рис.7 — Зенковка отверстий
Затем дорожки и контактные площадки покрываются флюсом, что очень удобно делать при помощи флюс-аппликатора, при этом достаточно флюса СКФ или раствора канифоли в спирте.
Рис.8 — Покрытие платы флюсом
После лужения платы расставляем и припаиваем компоненты. Автоматический регулятор оборотов для микродрели готов к эксплуатации.
Рис.9 — Автоматический регулятор оборотов для минидрели (вид сзади)
Данное устройство было проверено с несколькими видами двигателей, парой китайских различной мощности, и парой отечественных, серии ДПР и ДПМ – со всеми типами двигателей регулятор работает корректно после подстройки переменным резистором. Важным условием является чтобы коллекторный узел двигателя был в хорошем состоянии, т.к. плохой контакт щеток с коллектором двигателя может вызывать странное поведение схемы и работу двигателя рывками. На двигатель желательно установить искрогасящие конденсаторы и диод для защиты схемы от обратного тока при отключении питания.
На двигатель желательно установить искрогасящие конденсаторы и диод для защиты схемы от обратного тока при отключении питания.
регулятор оборотов с поддержанием мощности
Здравствуйте дорогие мои посетители. Хочу сегодня продолжить тему о коллекторных электродвигателях, а именно как подключить двигатель от стиральной машины с помощью платы регулирования оборотов с поддержкой мощности. Как вы, видели, я затрагивал уже эту тему. Снимал по этому поводу видео «Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат». Это видео стало очень популярным на моём канале, зрители оставили множество разных комментариев по этой теме. Также я там выложил источник, где я взял схему регулятора оборотов с поддержкой мощности коллекторных электродвигателей.
 И как мне показалось на тот момент, что человек скачает себе этот файл и
соберет себе такую же схему как у меня, и будет её использовать. Но нет,
оказалось не все так просто как мне этого хотелось, посыпалась, куча вопросов
от людей не только гуманитариев, но и совсем не плохих радиолюбителей. Были
даже предложения о покупке
плат регулирования оборотов.
И как мне показалось на тот момент, что человек скачает себе этот файл и
соберет себе такую же схему как у меня, и будет её использовать. Но нет,
оказалось не все так просто как мне этого хотелось, посыпалась, куча вопросов
от людей не только гуманитариев, но и совсем не плохих радиолюбителей. Были
даже предложения о покупке
плат регулирования оборотов.Что бы сразу ответить на многие вопросы, Вам, мои дорогие читатели, и появилась эта статья.
Занимаюсь я ремонтом электроинструмента в частности перемоткой электродвигателей. И во время ремонта качественного электроинструмента замечал там «Константную электронику», которая при снижении оборотов на электроинструменте поддерживала мощность электродвигателя. Меня это очень заинтересовало, начал пробовать различные простые регуляторы оборотов, регуляторы оборотов с обратной связью по току, в общем, кучу разных штуковин. Пока не наткнулся на сайт «chipmaker.ru» где пользователь «Bogdan» выложил «схему управления коллекторным двигателем на TDA1085». Собственно говоря, вот эта ссылка: http://www.chipmaker.ru/files/file/1490/ . После того как Вы перешли, жмем на кнопку «Загрузить»
Собственно говоря, вот эта ссылка: http://www.chipmaker.ru/files/file/1490/ . После того как Вы перешли, жмем на кнопку «Загрузить» В следующем окне обратно жмем «Загрузить»
У нас скачивается архив, разархивировав который, видим в нем несколько файлов (два варианта схем для управления двигателями постоянного и переменного тока с монтажными платами), нам для двигателя переменного тока нужны PSD файлы с пометкой «АС»
Распечатав их (принципиальная, монтажная и печатная плата), я отнес их своему очень хорошему товарищу Игорю , который мне спая регулятор оборотов с поддержкой мощности (сам я, к сожалению, не люблю работу с паяльником). Я испытал регулятор оборотов электроинструмента на TDA1085 на своей «болгарке». К счастью мой товарищ оказался хорошим радиолюбителем и нашел некоторые неточности в этих схемах и исправил их.
Я не могу вам сейчас сказать что этот регулятор оборотов коллекторных электродвигателей панацея, возможно, есть что-то и лучше я не знаю.
 Как поведет она себя на высоких или даже средних оборотах, честно сказать
я не знаю( здесь уже
можно посмотреть тест этой платы в разных режимах). Эта схема отлично ведет
себя на низких оборотах, и вот уже целый год
отлично себя показывает на Самодельном лобзиковом станке ,
приводом там служит та самая «болгарка» на которой я испытывал регулятор оборотов.
Как поведет она себя на высоких или даже средних оборотах, честно сказать
я не знаю( здесь уже
можно посмотреть тест этой платы в разных режимах). Эта схема отлично ведет
себя на низких оборотах, и вот уже целый год
отлично себя показывает на Самодельном лобзиковом станке ,
приводом там служит та самая «болгарка» на которой я испытывал регулятор оборотов.Если Вы уже собрались делать себе регулятор оборотов, давайте немного разберем его:
К клеммам «Фаза и Ноль» подключаем напряжение 220 Вольт (фазировка не влияет на работу схемы), светодиод «HL» служит нам индикатором питания платы регулятора оборотов, к клеммам « М1» подключаем наш электродвигатель, «таходатчик» который выдает постоянный ток подключаем к «Х3» а если же у вас он выдает переменный ток или импульсы, то к «Х2» (Как сделать таходатчик). К контактам «Х4» можно подключить тумблер (выключатель) который будет отключать наш двигатель, его ставить не обязательно, можно также отключать двигатель с помощью регулятора оборотов «R1» который подключается к контактам «Х1».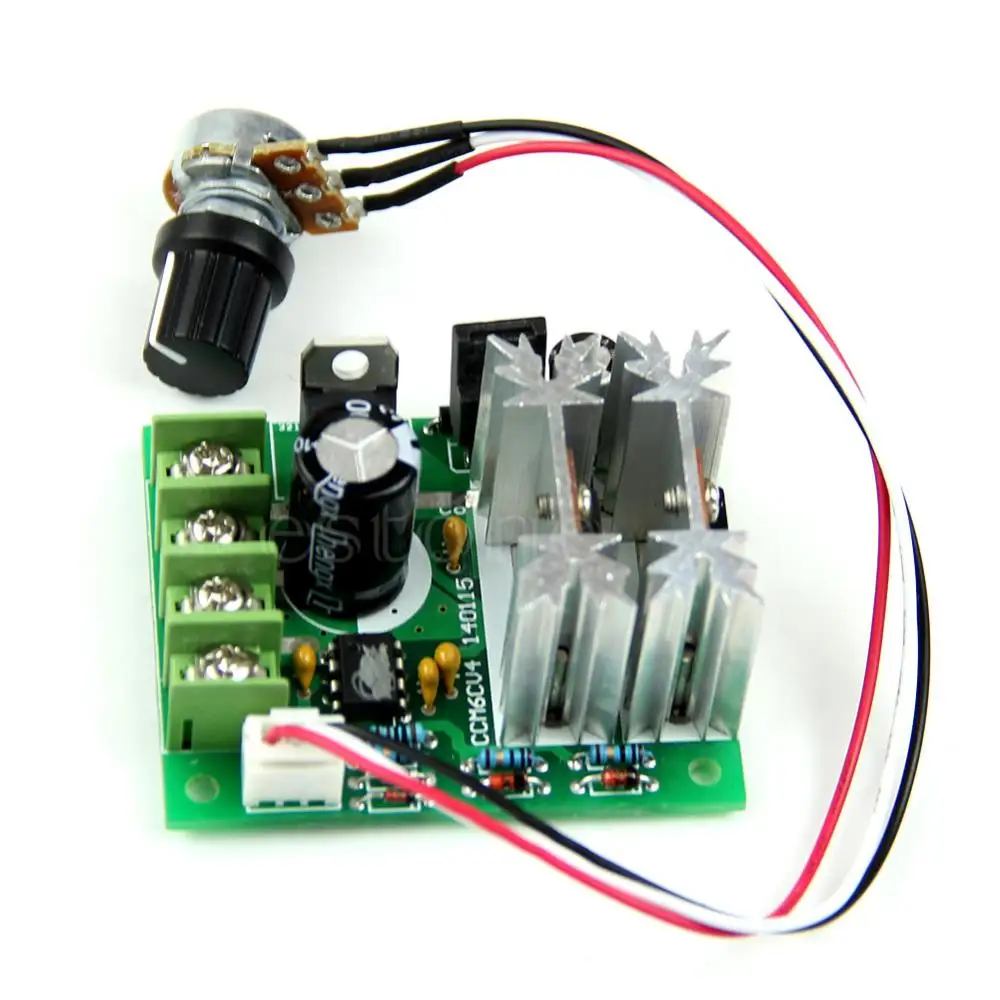 У Bogdana на этой схеме не был указан конденсатор «С
100µF х25V»
хотя он присутствует на монтажной плате (забыл указать). Также у него в схеме
находится очень мощный симистор «ВТА41 800V» который подходит для управления
мощными коллекторными электродвигателями, а для нас подойдет совсем другой на
10…16 Ампер (по цене будет на много дешевле). Симистор должен обязательно
быть с радиатором (вся эта схема построена для управления этим симистором, который в
свою очередь управляет непосредственно нашим электродвигателем). Ниже симистора
на схеме указаны два мощных сопротивления «R31» и «R33»
рассчитанные на 0,1 Ом и мощностью 5 Ватт каждый. Под каждые электродвигатель
нужно индивидуально настраивать плату регулятора оборотов (как это сделать). Регулируется
схема с помощью подстрочных сопротивлений «R3» и «R21».
Построечный резистор «R3»
регулирует плавность пуска двигателя, а «R21» служит для быстроты реагирования на нагрузку электродвигателя
(в зависимости отнего схема будет реагировать плавно или резко на нагрузку).
У Bogdana на этой схеме не был указан конденсатор «С
100µF х25V»
хотя он присутствует на монтажной плате (забыл указать). Также у него в схеме
находится очень мощный симистор «ВТА41 800V» который подходит для управления
мощными коллекторными электродвигателями, а для нас подойдет совсем другой на
10…16 Ампер (по цене будет на много дешевле). Симистор должен обязательно
быть с радиатором (вся эта схема построена для управления этим симистором, который в
свою очередь управляет непосредственно нашим электродвигателем). Ниже симистора
на схеме указаны два мощных сопротивления «R31» и «R33»
рассчитанные на 0,1 Ом и мощностью 5 Ватт каждый. Под каждые электродвигатель
нужно индивидуально настраивать плату регулятора оборотов (как это сделать). Регулируется
схема с помощью подстрочных сопротивлений «R3» и «R21».
Построечный резистор «R3»
регулирует плавность пуска двигателя, а «R21» служит для быстроты реагирования на нагрузку электродвигателя
(в зависимости отнего схема будет реагировать плавно или резко на нагрузку).
Для лучшего удобства я подготовил Вам список всех деталей, которые применяются в этом регуляторе оборотов с поддержкой мощности («+» обозначены полярные конденсаторы):
20кОм | Пременное 1шт | |
20кОм | Подстроечное 1шт | R3 |
| 1,2кОм 0,25-0,125W | 3шт | R4;5;9 |
| 160кОм 0,25-0,125W | 2шт | R6;8 |
| 24 Ом 0,25-0,125W | 1шт | R7 |
| 1м 0,25-0,125W | 1шт | R10 |
| 120кОм 0,25-0,125W | 1шт | R11 |
| 47кОм 0,25-0,125W | 1шт | R12 |
| 470кОм 0,25-0,125W | 1шт | R13 |
| 220кОм 0,25-0,125W | 1шт | R14 |
| 51 Ом 0,25-0,125W | 4шт | R15;19;25;30 |
| 2,2кОм 0,25-0,125W | 2шт | R16;22 |
| 68кОм 0,25-0,125W | 1шт | R17 |
| 820 Ом 0,25-0,125W | 1шт | R18 |
| 2,7кОм 0,25-0,125W | 1шт | R20 |
10кОм | Подстроечное 1шт | R21 |
| 390кОм 0,25-0,125W | 4шт | R23;24;28;29 |
1шт | R26 | |
1шт | R27 | |
1шт | 32 | |
2шт | R31;33 | |
1шт | R34 | |
1шт | 35 | |
3шт | С1;5;неуказанный | |
3шт | C2;8;9 | |
3шт | С3;4;7 | |
820р | 1шт | С6 |
1шт | С10 | |
1шт | С11 | |
1шт | С12 | |
1шт | С13 | |
1шт | С14 | |
1шт | С15 | |
| 1шт Микросхема | МС1 | |
ВТА41 800V (не обязат) | 1шт Семистор | Т1 |
1шт стабилитрон | ||
1шт стабилитрон | ||
1шт диод | ||
1шт предохранитель | FU1 | |
На 3В | 1шт светодиод |
Изначально автор Bogdan на монтажной плате регулятора оборотов не указал буквенные обозначения всех деталей, но благодаря моему товарищу (огромное ему спасибо) он расставил все обозначения и исправил все неточности которые были у Bogdanа
ВНИМАНИЕ!!! В расположении деталей ОШИБКА! Сопротивление R21 обозначено как R27.
 Будьте внимательны!
Будьте внимательны!Ссылки для скачивания:
ОЧЕНЬ интересные видео по теме!!!
Агрессивные тесты.
Добавлено Анатолием:
Я думаю Александр не обидится если я в его теме выскажу несколько своих соображений.Собрал уже не одну плату и могу сказать со сто процентной уверенностью. Если у кого то что то не работает, то проверяйте качество изготовления платы, качество и правильность монтажа, исправность элементов и двигателя. Все причины не работы (некорректной работы) кроются только в этом. Печатки и схемы выложенные в нете рабочие. Сам недавно столкнулся с подобным, две разные платы, а проявление неисправности одно и тоже.
 При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.
При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.Попутно убедился, что если уменьшить С11 идущий на 14 ногу микросхемы до 22Н, то двигатель стартует, набирает максимальные обороты и обороты не регулируются. Поэтому с ним тоже нельзя ошибаться 47Н и точка.
Теперь по поводу замеров напряжения.
Я собираю платы с отдельным блоком питания, поэтому промеры даю для этого случая.
Исходные условия, к плате подключен двигатель с таходатчиком, регулятор оборотов в нулевом положении (минимум до конца), блок питания в розетку включён, 220В на плату не подаётся.
1-0,17В
2-0,17В
3-2,63В
4-0
5-0
6-2,4В
7-0,05В
8-0
9-14,65В
10-13,7В
11-12,83В
12-0,55В
13-0
14-11,34В
15-0,03В
16-0,03В
Условия те-же, но подключено 220В и регулятор стоит на небольших оборотах. Двигатель медленно вращается.
Двигатель медленно вращается.
1-0,25В
2-0,3В
3-2,62В
4-0,55В
5-0,55В
6-2,4В
7-1,14В
8-0
9-14,2В
10-14,2В
11- не измеряется.
12-0,74В
13-0,69В
14-4,8В при касании щупом двигатель ускоряется.
15-0,73В
16-0,58В
Отличия могут быть но не очень большие. Напряжение на ноге 3 устанавливается регулятором R21.
Кроме этого советовал бы увеличить резистор R9 вместо 1,2 кОм ставить 20кОм. Этим уменьшается напряжение с таходатчика. И R17 вместо 68кОм ставить 27кОм. Ну и диод для защиты микросхемы само собой.
Пару слов по немецкой схеме. При правильной сборке, правильно выполненной печатке и исправных деталях всё работает без вопросов. Рекомендовал бы такую последовательность действий. Собрали плату, проверили сборку, микросхему не ставим. В панельку микросхемы подключаем на ноги 8-9 резистор 1,6кОм 1Вт, подключаем питание 220В, двигатель и таходатчик не подключен (это не принципиально), и меряем напряжение на подключённом резисторе. Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
устройство и изготовление своими руками. Как сделать самодельный регулятор оборотов двигателя
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.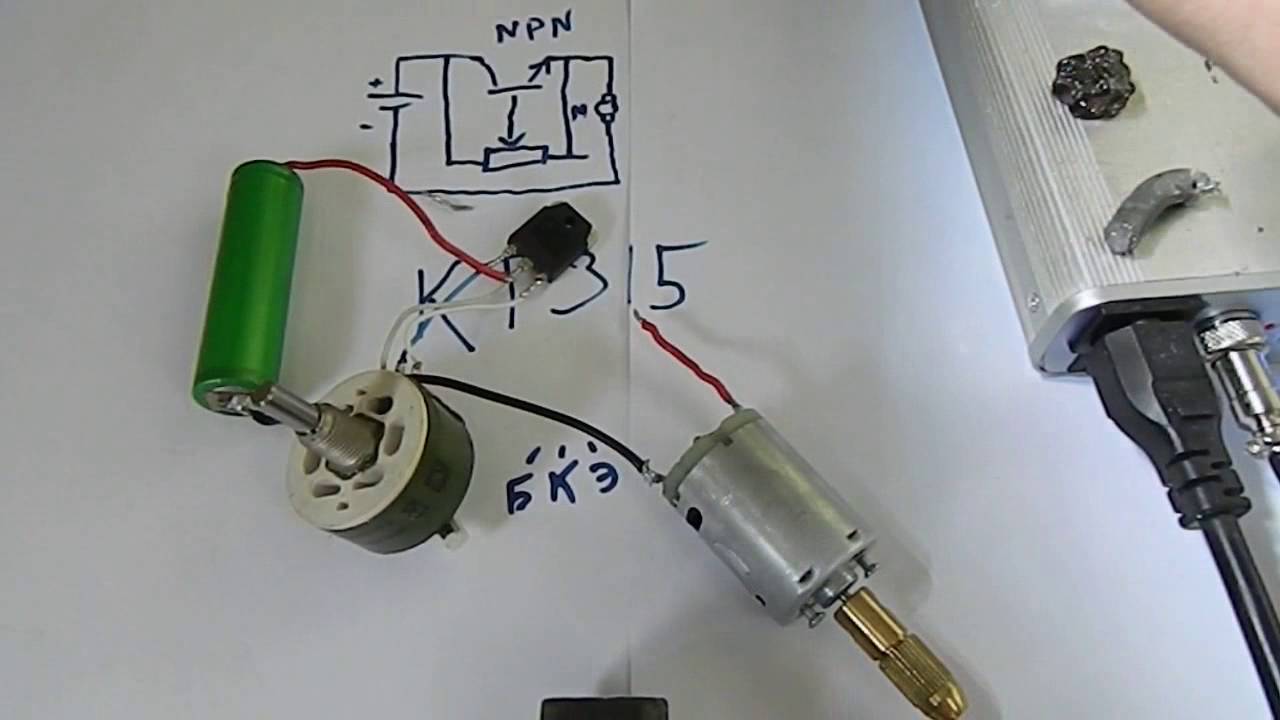
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров , которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Схема регулятора основанного на широтно-импульсной модуляции или просто , может быть использована для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала при помощи ШИМ дает большую производительность, чем при использовании простого изменения постоянного напряжения подаваемого на двигатель.
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555.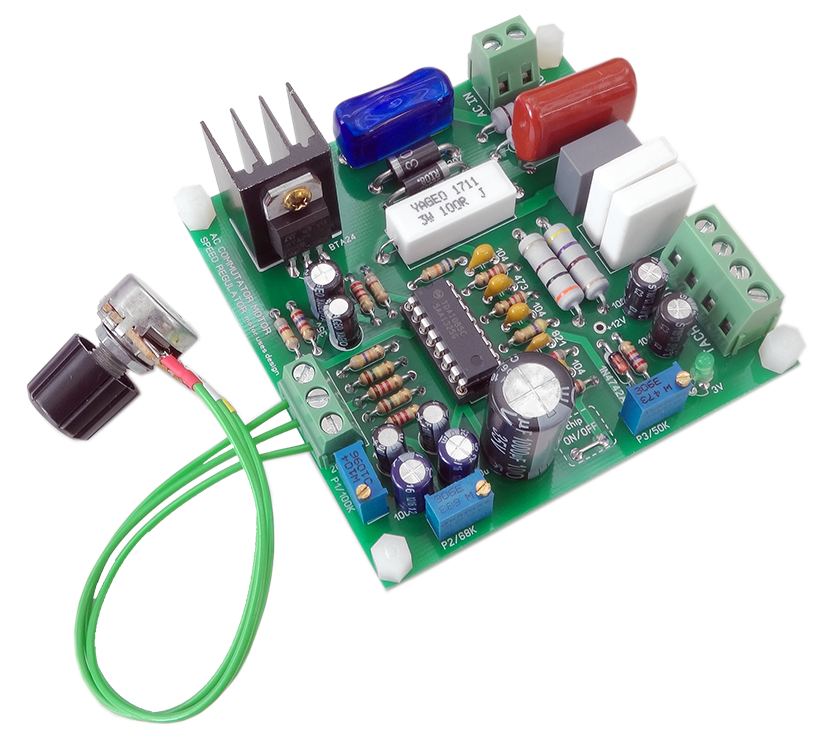 Из-за применения схема регулирования оборотов получилась достаточно простой.
Из-за применения схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.
Длительность положительного импульса можно регулировать переменным резистором R2. Чем больше ширина положительного импульса поступающего на затвор MOSFET транзистора, тем больше мощность поступает на двигатель постоянного тока. И наоборот чем уже ширина его, тем меньше мощности передается и как следствие понижаются обороты двигателя . Данная схема может работать от источника питания в 12 вольт.
Характеристики транзистора VT1 (BUZ11):
- Тип транзистора: MOSFET
- Полярность: N
- Максимальная рассеиваемая мощность (Вт): 75
- Предельно допустимое напряжение сток-исток (В): 50
- Предельно допустимое напряжение затвор-исток (В): 20
- Максимально допустимый постоянный ток стока (А): 30
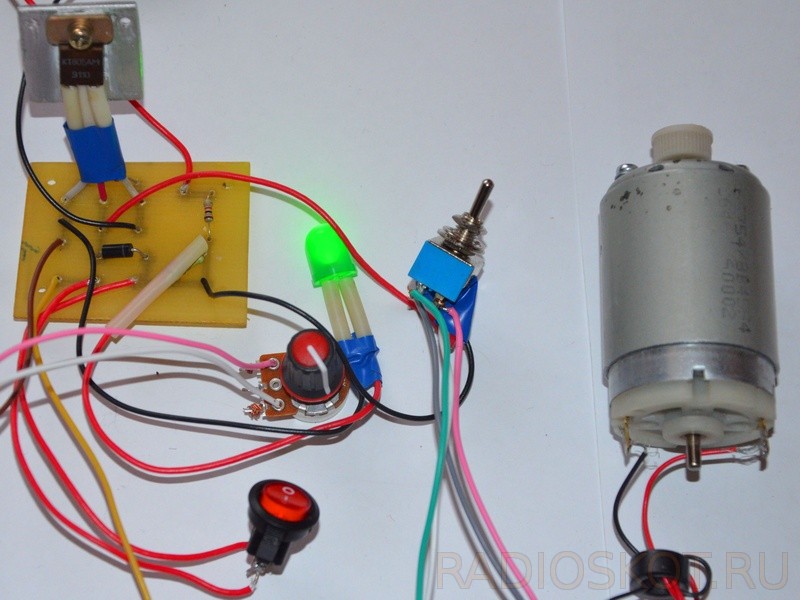
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4.
Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1.
Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3 . Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл ), а монтажный чертеж (файл ) – на белом листе офисной (формат А4).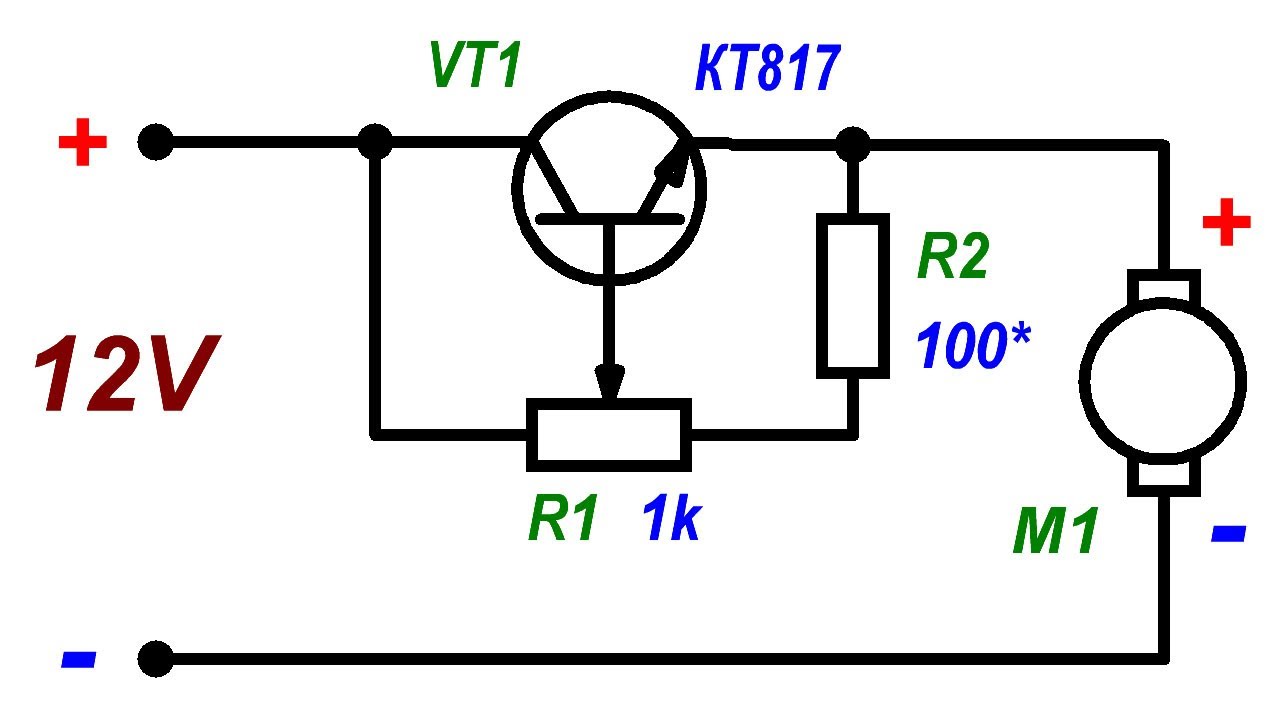
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом. Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском.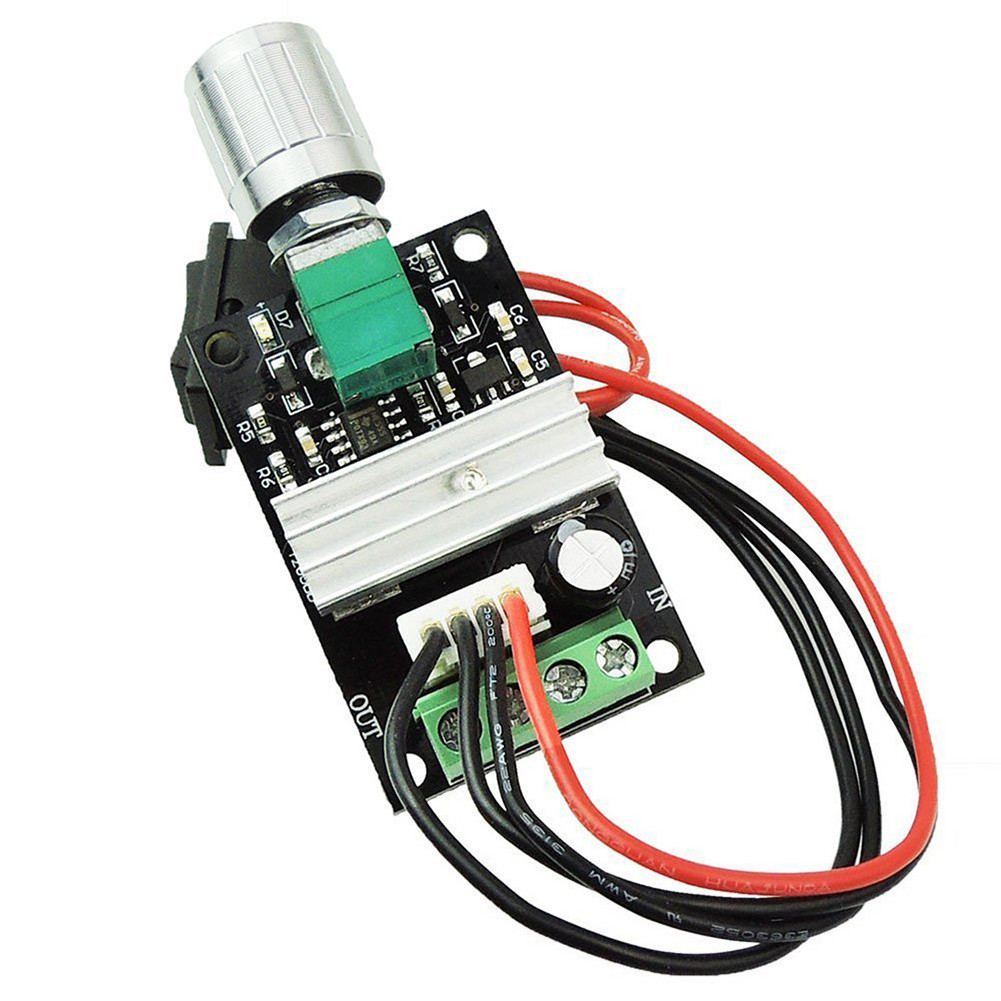 Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы.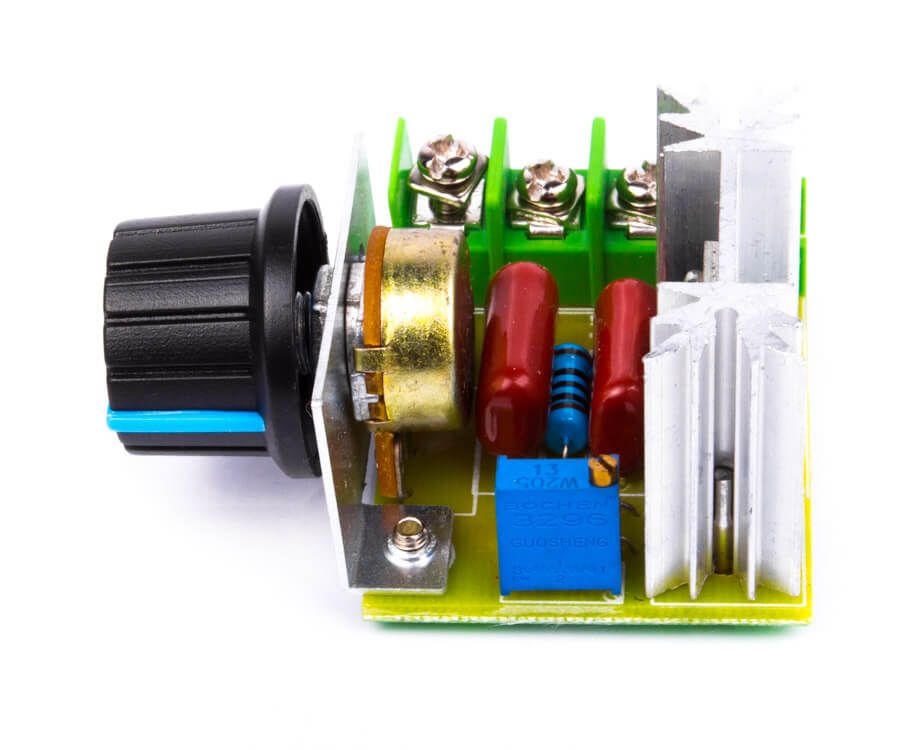 Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока./F036M_(6-90V-15A)-02.JPG) И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулятор оборотов двигателя на PIC-контроллере
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение — 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо более простой схеме. Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Регулятор скорости двигателя переменного тока
ШИМ контроллер на 12 вольт
Драйвер регулятора постоянного тока полумостовой
Схема регулятора оборотов минидрели
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Процесс пропорциональных сигналов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Регулятор для двигателя переменного тока
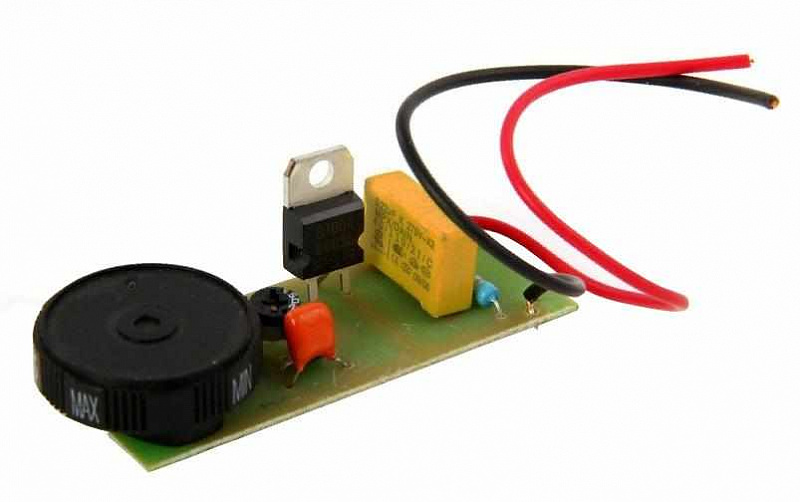
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Принципиальная схема регулятора электромотора переменного питания
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM ). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Принципиальная схема регулятора электромотора постоянного питания
Здесь VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства, в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Широкое применение таймер 555 находит в устройствах регулирования, например, в ШИМ — регуляторах оборотов двигателей постоянного тока.
Все, кто когда — либо пользовался аккумуляторным шуруповертом, наверняка слышали писк, исходящий изнутри. Это свистят обмотки двигателя под воздействием импульсного напряжения, порождаемого системой ШИМ.
Другим способом регулировать обороты двигателя, подключенного к аккумулятору, просто неприлично, хотя вполне возможно. Например, просто последовательно с двигателем подключить мощный реостат, или использовать регулируемый линейный стабилизатор напряжения с большим радиатором.
Вариант ШИМ — регулятора на основе таймера 555 показан на рисунке 1.
Схема достаточно проста и базируется все на мультивибраторе, правда переделанном в генератор импульсов с регулируемой скважностью, которая зависит от соотношения скорости заряда и разряда конденсатора C1.
Заряд конденсатора происходит по цепи: +12V, R1, D1, левая часть резистора P1, C1, GND. А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
Рисунок 1. Схема ШИМ — регулятора на таймере 555
Схема эта настолько популярна, что выпускается уже в виде набора, что и показано на последующих рисунках.
Рисунок 2. Принципиальная схема набора ШИМ — регулятора.
Здесь же показаны временные диаграммы, но, к сожалению, не показаны номиналы деталей. Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Кстати, на этой схеме появился еще один элемент — диод D4. Его назначение в том, чтобы предотвратить разряд времязадающего конденсатора C1 через источник питания и нагрузку — двигатель. Тем самым достигается стабилизация работы частоты ШИМ.
Тем самым достигается стабилизация работы частоты ШИМ.
Кстати, с помощью подобных схем можно управлять не только оборотами двигателя постоянного тока, но и просто активной нагрузкой — лампой накаливания или каким-либо нагревательным элементом.
Рисунок 3. Печатная плата набора ШИМ — регулятора.
Если приложить немного труда, то вполне возможно такую воссоздать, используя одну из программ для рисования печатных плат. Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Рисунок 4. Внешний вид набора ШИМ — регулятора.
Правда, уже собранный фирменный набор, смотрится достаточно симпатично.
Вот тут, возможно, кто-то задаст вопрос: «Нагрузка в этих регуляторах подключена между +12В и коллектором выходного транзистора. А как быть, например, в автомобиле, ведь там все уже подключено к массе, корпусу, автомобиля?»
Да, против массы не попрешь, тут можно только рекомендовать переместить транзисторный ключ в разрыв «плюсового9raquo; провода. Возможный вариант подобной схемы показан на рисунке 5.
Возможный вариант подобной схемы показан на рисунке 5.
На рисунке 6 показан отдельно выходной каскад на транзисторе MOSFET. Сток транзистора подключен к +12В аккумулятора, затвор просто «висит9raquo; в воздухе (что не рекомендуется), в цепь истока включена нагрузка, в нашем случае лампочка. Такой рисунок показан просто для объяснения, как работает MOSFET транзистор.
Для того, чтобы MOSFET транзистор открыть, достаточно относительно истока подать на затвор положительное напряжение. В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
На этом рисунке проще всего закрыть транзистор, замкнув накоротко затвор с истоком. И такое вот замыкание вручную для проверки транзистора вполне пригодно, но в реальной схеме, тем более импульсной придется добавить еще несколько деталей, как показано на рисунке 5.
Как было сказано выше, для открывания MOSFET транзистора необходим дополнительный источник напряжения. В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
Чтобы открыть транзистор VT1, на его затвор необходимо подать положительное напряжение от заряженного конденсатора C2. Совершенно очевидно, что это произойдет только при открытом транзисторе VT2. А это возможно лишь в том случае, если закрыт транзистор оптрона OP1. Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
В этот момент входной сигнал ШИМ должен иметь низкий уровень и шунтировать светодиод оптрона (такое включение светодиодов часто называют инверсным), следовательно, светодиод оптрона погашен, а транзистор закрыт.
Чтобы закрыть выходной транзистор, надо соединить его затвор с истоком. В нашей схеме это произойдет, когда откроется транзистор VT3, а для этого требуется, чтобы был открыт выходной транзистор оптрона OP1.
Сигнал ШИМ в это время имеет высокий уровень, поэтому светодиод не шунтируется и излучает положенные ему инфракрасные лучи, транзистор оптрона OP1 открыт, что в результате приводит к отключению нагрузки — лампочки.
Как один из вариантов применения подобной схемы в автомобиле, это дневные ходовые огни. В этом случае автомобилисты претендуют на пользование лампами дальнего свете, включенными вполнакала. Чаще всего эти конструкции на микроконтроллере. в интернете их полно, но проще сделать на таймере NE555 .
j&;лектрик Ин &2;о — элек &0;ротехника и элек &0;роника, дома &6;няя ав &0;оматизация, l&;татьи про &1;стройство и ремон &0; дома &6;ней элек &0;ропроводки, роk&;етки и в &9;ключатели, провода и кабели, иl&;точники l&;вета, ин &0;ересные &2;акты и многое др &1;гое для элек &0;риков и дома &6;них маl&;теров.
Ин &2;ормация и об &1;чающие ма &0;ериалы для на &5;инающих элек &0;риков.
Кейl&;ы, пример &9; и &0;ехнические ре &6;ения, обk&;оры ин &0;ересных элек &0;ротехнических новинок.
Вl&;я ин
&2;ормация на l&;айте j&;лектрик Ин
&2;о предоl&;тавлена в оk&;накомительных и поk&;навательных
&4;елях. За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
Перепе &5;атка ма &0;ериалов l&;айта k&;апрещена.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1.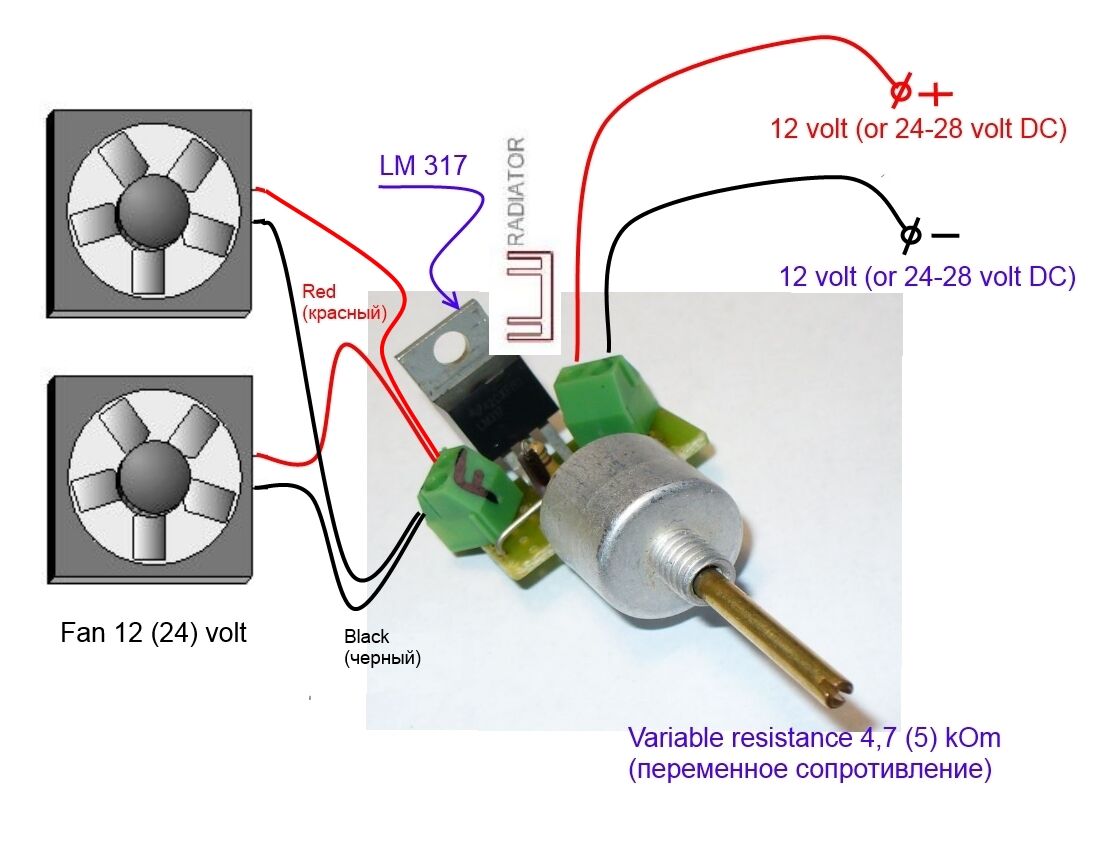 Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно.Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.

Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока.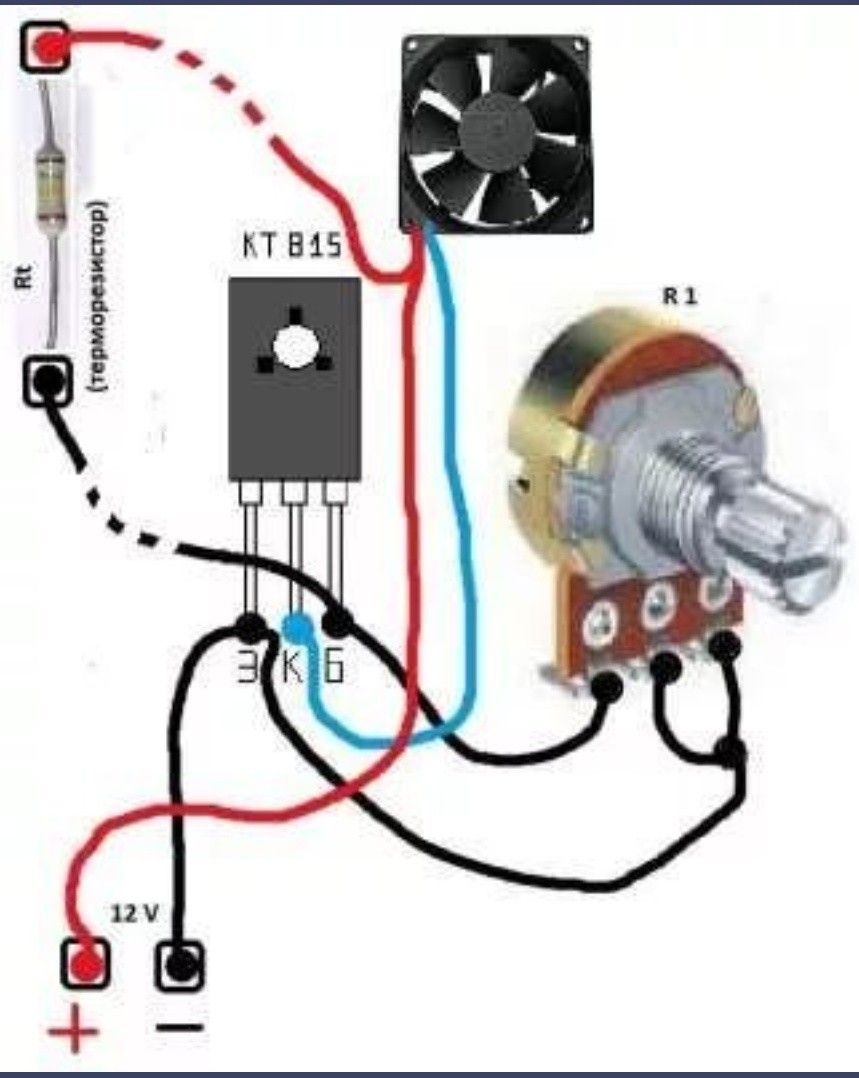 Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору.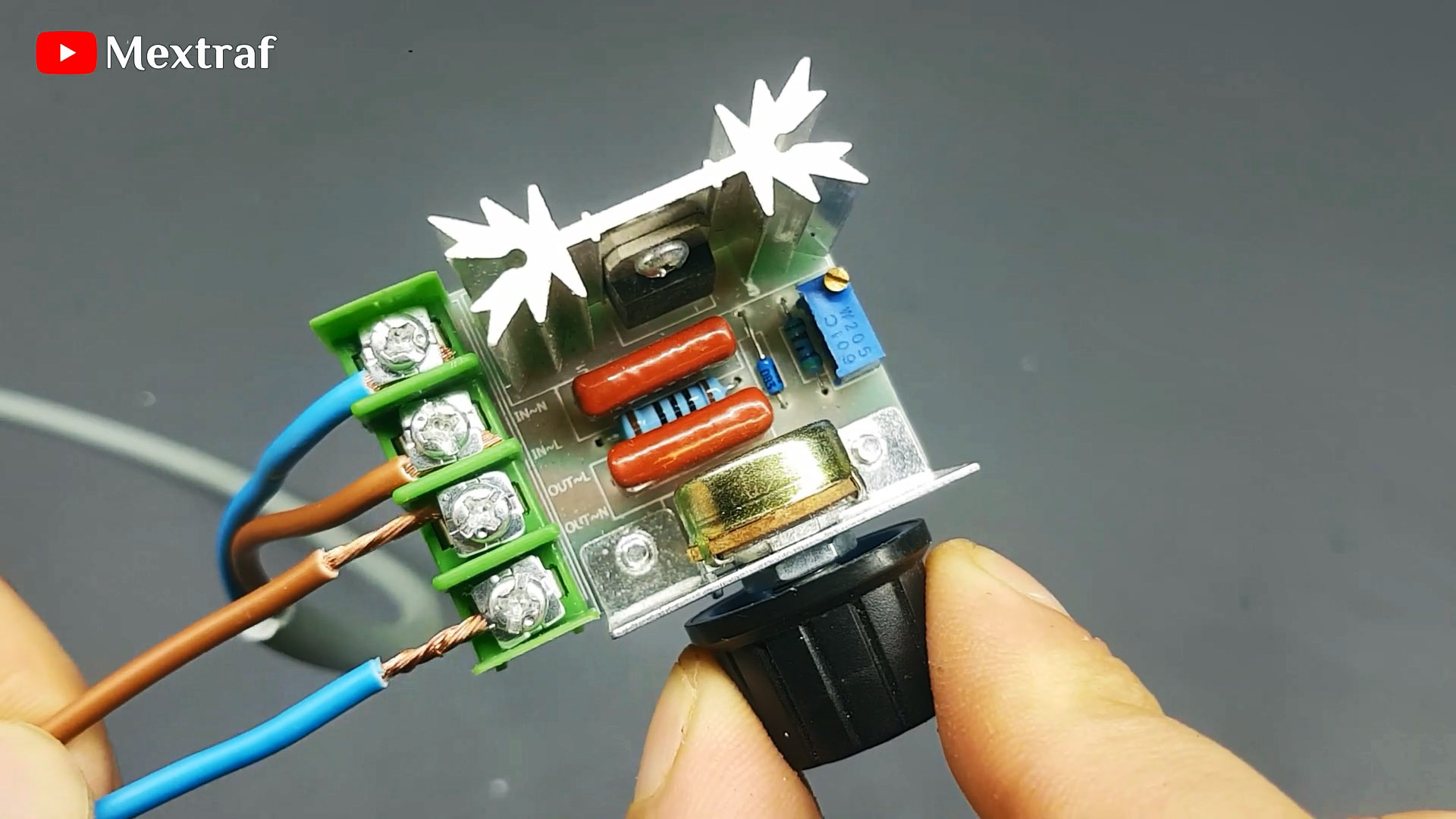 А 2 контакт к входу переменного напряжения на выпрямительном мосту.
А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным. Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.
- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.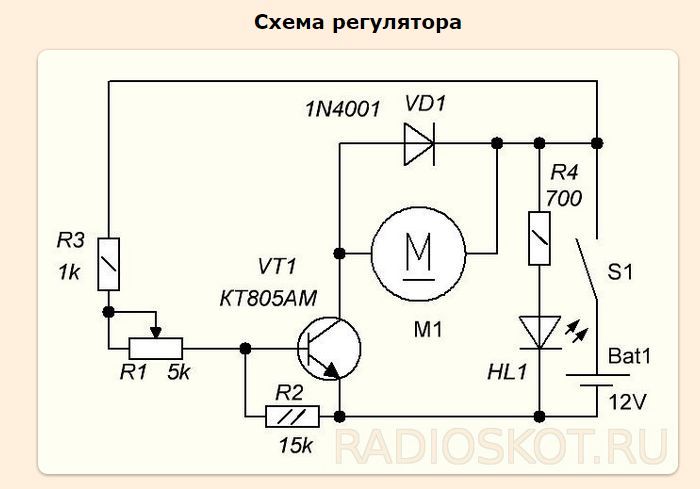
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике. Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
- Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса. Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
 Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя. Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
 Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения. Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
Учебное пособие по контроллеру скорости двигателя— инженерное мышление
Изучите основы регулятора скорости электродвигателя. В этой статье мы узнаем, как спроектировать простой ШИМ-регулятор скорости для двигателя постоянного тока, изучая, как протекает ток в цепи и что делает каждый компонент. Вы даже можете построить схему самостоятельно!
Прокрутите вниз, чтобы посмотреть обучающее видео на YouTube.
Это простой контроллер скорости с широтно-импульсной модуляцией для двигателя постоянного тока, в котором используется один из них, таймер 555, и мы собираемся показать вам, как работает схема, как ее спроектировать и даже превратить в профессионально выглядящую печатную модель. печатная плата.Вы даже можете скачать копию нашей печатной платы и собрать свой собственный ЗДЕСЬ.
печатная плата.Вы даже можете скачать копию нашей печатной платы и собрать свой собственный ЗДЕСЬ.
Проектирование схемы
Сердцем нашей системы является таймер 555. Это компонент интегральной схемы, а это означает, что внутри него находится несколько более мелких компонентов, объединенных в один корпус, что значительно облегчает нашу работу как дизайнеров. Мы увидим, как этот компонент работает, когда будем строить схему.
Теперь мы собираемся использовать Altium Designer для этого проекта, который любезно спонсировал эту статью.Все наши зрители могут получить бесплатную пробную версию программы ЗДЕСЬ.
Мы начинаем новый проект и создаем нашу схему, а также файл платы. Затем нам нужно начать добавлять наши компоненты, мы можем использовать встроенный инструмент, но мы собираемся использовать надстройку, которая, по нашему мнению, немного упростит задачу. Находим компонент на сайте поставщиков, мы используем mouser, но вы можете использовать кого хотите.
Мы нашли таймер 555, поэтому мы берем номер детали, вставляем его в загрузчик библиотеки и нажимаем «Поиск», он находит компонент, поэтому мы нажимаем «Добавить в дизайн».
Таймер 555 может выдерживать максимальную нагрузку около 200 миллиампер. Мы собираемся управлять одним из этих двигателей постоянного тока от источника питания 12 В, и мы видим, что при 12 В он потребляет ток около 1,4 А, и это без нагрузки, что уже больше, чем может выдержать таймер 555. Поэтому нам нужно будет использовать полевой МОП-транзистор, который представляет собой тип электронного переключателя.
Кстати, мы подробно рассмотрели, как работают двигатели постоянного тока, в нашей предыдущей статье ЗДЕСЬ .
Мы собираемся использовать полевой МОП-транзистор IRFZ24N, потому что он может работать как с напряжением, так и с током, а также имеет низкое сопротивление сток-исток в открытом состоянии.Итак, мы находим этот компонент и добавляем его в схему. Двигатель будет подключен к выводу стока MOSFET, а вывод истока соединится с землей.
МОП-транзистор обычно блокирует ток, поэтому двигатель не вращается. Однако, если мы подадим небольшое напряжение на вывод затвора, это позволит протекать некоторому току. Чем выше приложенное напряжение, тем больший ток может протекать, и поэтому двигатель вращается быстрее.
Таймер 555 подает напряжение на контакт затвора MOSFET с контакта 3.Чтобы изменить напряжение и контролировать скорость двигателя, он будет посылать его в виде импульсов. Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Ток на вывод затвора очень мал, но мы поместим резистор 1 кОм между выводом затвора MOSFET и выводом 3 таймера 555, это защитит компонент, ограничив ток, если MOSFET выйдет из строя, и позволит току выйти из строя.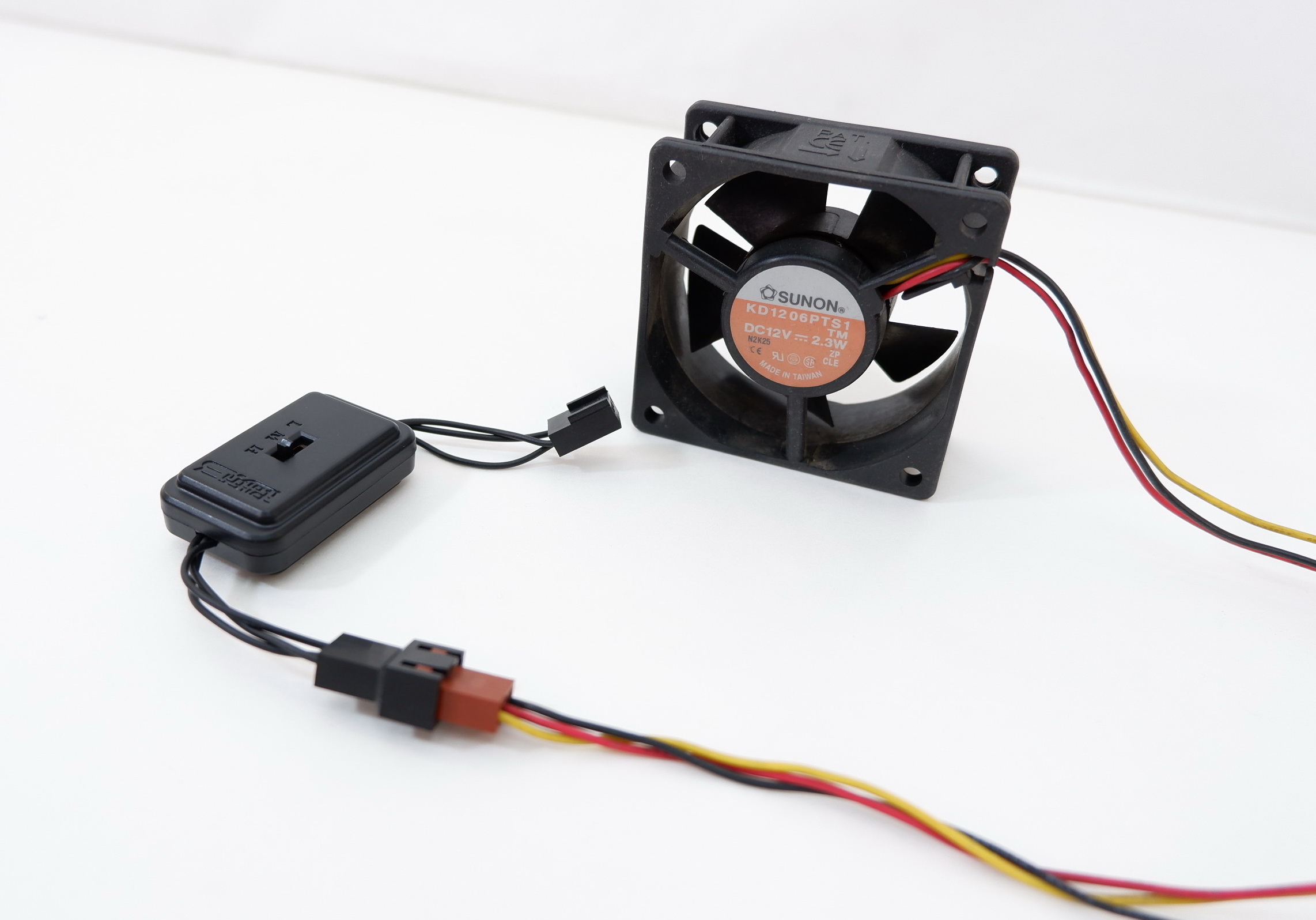 вытекать из ворот.
вытекать из ворот.
Заряд электронов будет накапливаться на контакте затвора MOSFET, и нам нужно разрядить его, чтобы выключить его, поэтому мы размещаем еще один резистор на 1 кОм и подключаем его к земле, которая обеспечивает путь разряда.
Я хочу подключить двигатель и источник питания снаружи от печатной платы, поэтому теперь я добавлю клемму для входа и еще одну для подключения двигателя.Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Электродвигатель состоит из витков проволоки, поэтому мы можем считать его катушкой индуктивности. Когда катушки индуктивности включены, они накапливают энергию в своем магнитном поле, когда мощность отключается, это магнитное поле разрушается, и катушка индуктивности выталкивает электроны через цепь. Это вызывает очень большой и внезапный всплеск энергии, который может повредить нашу цепь. Поэтому мы добавляем обратноходовой диод, который обеспечивает путь для безопасной циркуляции и уменьшения энергии. Для этого мы используем диод 1N4007, который выдерживает большой пиковый ток. Итак, мы добавляем это в схему.
Мы подробно рассмотрели катушки индуктивности, диоды и транзисторы в наших предыдущих статьях ЗДЕСЬ — Катушки индуктивности, диоды, транзисторы.
Теперь мы можем подключить контакт 8 таймера 555, который является источником питания компонентов, и мы подключаем его к плюсу.Затем подключаем контакт 1 к земле.
Внутри таймера у нас есть три резистора по 5 кОм между контактами 1 и 8, напряжение уменьшается на одну треть (1/3) после каждого резистора. Поскольку у нас есть 12 вольт на контакте 8, напряжение уменьшится до 8 вольт после первого резистора, а затем до 4 вольт после второго резистора. Таймер 555 использует их в качестве эталона.
К резисторам подключены два компаратора. Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход.Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход.Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Теперь компараторы подключены к двум разным напряжениям, поэтому он может их сравнивать. Если положительное входное напряжение выше отрицательного, он выдает высокий сигнал или положительное напряжение. Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Мы соединим контакты 2 и 6 вместе, чтобы напряжение было одинаковым. Выход компараторов подключается к другому внутреннему компоненту, называемому триггером. Первый компаратор подключается к входу «сброс», второй компаратор подключается к входу «установка». Существует также вывод с именем «не Q». Когда триггер получает высокий уровень сигнала от компаратора 1, он выдает высокий уровень сигнала.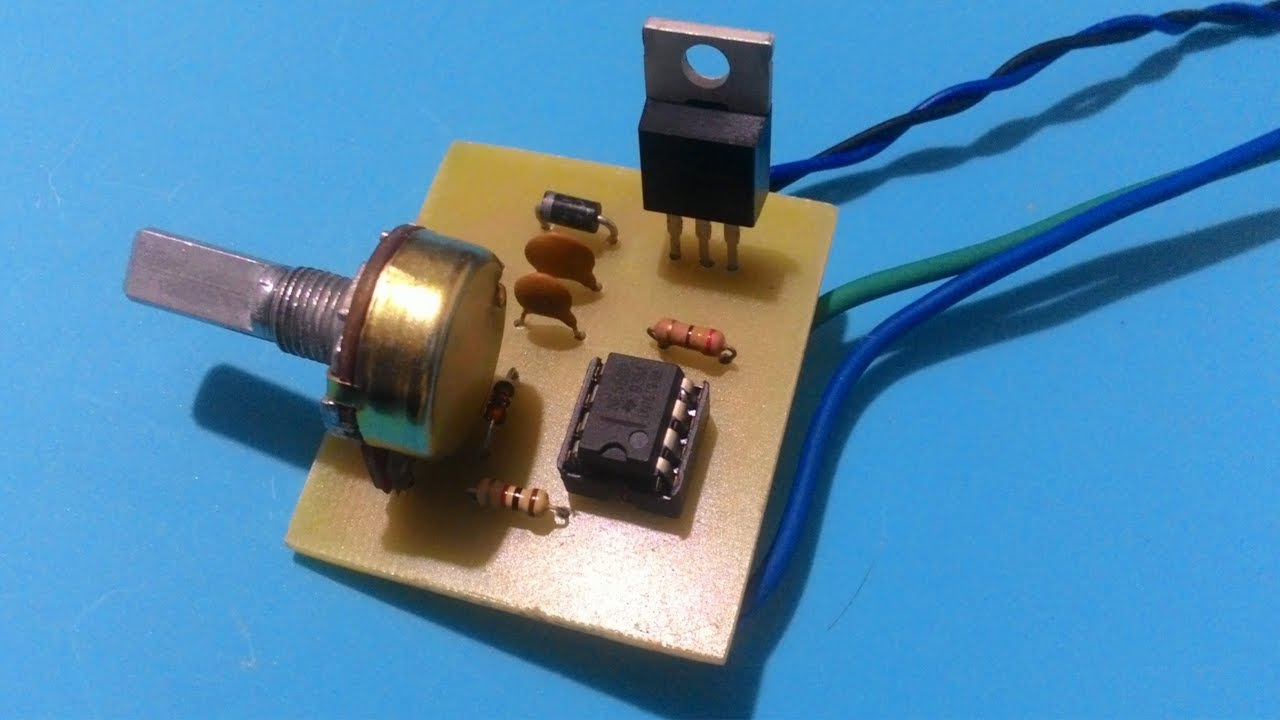 Когда триггер получает высокий сигнал от компаратора 2, он выдает низкий сигнал.Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Когда триггер получает высокий сигнал от компаратора 2, он выдает низкий сигнал.Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Если это кажется запутанным, не волнуйтесь, это станет понятным через мгновение, когда мы пройдемся по схеме.
Если подать небольшое напряжение, скажем, 3,9 В на контакты 2 и 6, компаратор 1 выдаст низкий уровень сигнала, а компаратор 2 выдаст высокий сигнал. Это устанавливает временной интервал для начала.Триггер выдает низкий сигнал. Инвертор выдает высокий уровень сигнала.
Как повышаем напряжение, например до 6 вольт. Компаратор 1 и 2 будут выдавать сигнал низкого уровня, триггер остается неизменным, отсчет времени продолжается. Но при напряжении 8 вольт компаратор 1 выдает высокий сигнал, а компаратор 2 выдает низкий сигнал. Выход триггера теперь меняется на противоположный, и на выходе высокий уровень. Это сбрасывает время.
Выход триггера остается неизменным до тех пор, пока напряжение не упадет примерно до 4 вольт, где компаратор 1 выдает низкий сигнал, а компаратор 2 выдает высокий сигнал, это снова запускает таймер.
Итак, мы видим, что по мере увеличения и уменьшения напряжения на контактах 2 и 6 изменяется выход таймера 555. Итак, чтобы контролировать напряжение и, следовательно, временной интервал, мы подключаем контакты 2 и 6 к конденсатору.
Когда мы подключаем конденсатор к источнику питания, он мгновенно достигает напряжения батареи. Но если мы подключим его через резистор, резистор замедлит время зарядки. Чем больше резистор, тем больше времени требуется, чтобы зарядить напряжение.
Итак, чтобы зарядить наш конденсатор, мы будем использовать фиксированный резистор на 1 кОм и потенциометр на 100 кОм.Потенциометр представляет собой переменный резистор, поэтому мы можем изменять время зарядки конденсатора. Нам также потребуется разрядить конденсатор, чтобы перезапустить таймер. Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148, которые имеют прямой ток около 300 миллиампер, что подойдет для этого приложения.
Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148, которые имеют прямой ток около 300 миллиампер, что подойдет для этого приложения.
Конденсатор будет керамическим конденсатором емкостью 10 нанофарад, через мгновение мы поймем, почему.Итак, мы добавляем эти компоненты в схему, затем подключаем диоды к постоянному резистору, а диоды к контактам 1 и 3 потенциометра. Затем подключаем конденсатор к земле, а также к контактам 2 и 6 таймера 555, а также к контакту 2 потенциометра.
Контакт 7 — это контакт разрядки, который подключен к нашему конденсатору времени. Внутри таймера 555 выход триггера соединяется с выводом затвора внутреннего транзистора. Это контролирует поток тока от конденсатора к земле.Когда на выходе триггера низкий уровень, транзистор закрыт, поэтому конденсатор заряжается, и напряжение начинает увеличиваться. Когда напряжение увеличивается настолько, что на выходе триггера появляется высокий уровень, открывается транзистор, который разряжает конденсатор, и, таким образом, напряжение уменьшается. Когда оно достигает 4 Вольт, конденсатор снова начинает заряжаться, когда он достигает 8 Вольт, он разряжается.
Вы можете узнать, как работают конденсаторы в нашей предыдущей статье ЗДЕСЬ
У нас также есть контакт 5, который является управляющим напряжением.Мы можем использовать это, чтобы переопределить компаратор 1. Нам это не нужно для этой схемы, поэтому мы подключаем его к земле через керамический конденсатор емкостью 0,1 мкФ. Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
У нас также есть контакт 4, контакт сброса, который мы соединим с плюсом схемы. Мы могли бы использовать это, чтобы переопределить и сбросить триггер, отключив питание. Нам это не нужно для этой схемы, поэтому она подключена к плюсу.
Итак, при зарядке ток течет через резистор, диод и левую часть потенциометра к конденсатору. На выходе триггера низкий уровень, поэтому разрядный транзистор закрыт. Контакт 3 выводит высокий сигнал.
Как только конденсатор заряжается до 8 В, на выходе триггера становится высокий уровень, который включает транзистор, и конденсатор разряжается через правую сторону потенциометра и диода. Контакт 3 выводит сигнал низкого уровня.
Транзистор остается открытым, поэтому конденсатор разряжается до тех пор, пока не достигнет 4 В, после чего триггер снова меняет направление, отключая транзистор, что снова запускает отсчет времени.Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Мы можем рассчитать производительность следующим образом.
Конденсатор заряжается через резистор R1 и левую часть потенциометра. Таким образом, время зарядки рассчитывается по этой формуле. Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Конденсатор разряжается через правую часть потенциометра, поэтому время разрядки рассчитывается по этой формуле.Это дает нам 0,34 миллисекунды.
Каждый цикл — это время включения и выключения, поэтому 0,35 плюс 0,34 дает нам 0,69 миллисекунды.
Частота равна 1, деленной на время цикла, что дает нам 1428 Герц
Рабочий цикл рассчитывается таким образом, поэтому выход включен примерно 50% времени.
Мы используем конденсатор емкостью 10 нанофарад, потому что он обеспечивает очень высокую частоту, а двигатель постоянного тока лучше всего работает на высокой частоте. Если бы мы использовали очень большой конденсатор, например 100 микрофарад, частота падала бы до 0.14 Гц, и каждый цикл занимает 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Итак, теперь я создам простой прототип на макетной плате, чтобы проверить, все ли работает. Вроде нормально, скорость можно регулировать, так что будем доделывать дизайн печатной платы.
Добавляем аннотации. Затем мы импортируем компоненты в файл проекта печатной платы и тратим некоторое время на перестановку компонентов на плате. Когда все будет готово, мы обрисовываем доску и преобразуем ее в «защиту».Затем определите форму платы. Мы добавляем текст на клеммы, чтобы знать полярность цепи, когда будем ее использовать. Затем мы будем использовать функцию автоматического маршрута, чтобы соединить все. Как только он будет завершен, мы увеличим ширину маршрутов, которые будут нести более высокое напряжение и ток. Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Производство печатной платы
Итак, мы готовы к печати нашей печатной платы.
Мы собираемся использовать JLC PCB для печати нашей печатной платы, которая также любезно спонсировала это видео. Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Не забудьте, что вы можете скачать мои файлы дизайна, снова ссылки в описании видео для этого.
Итак, мы просто авторизуемся и загрузим наш gerber-файл.Через несколько секунд он генерирует предварительный просмотр схемы на экране. Затем мы можем настроить дизайн с помощью различных цветов и материалов и т. д. Но я оставлю их по умолчанию и сохраню в корзину. Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Через несколько дней наша плата приходит по почте.Доски выглядят отлично, я очень доволен результатом.
Итак, начинаем припаивать компоненты к плате.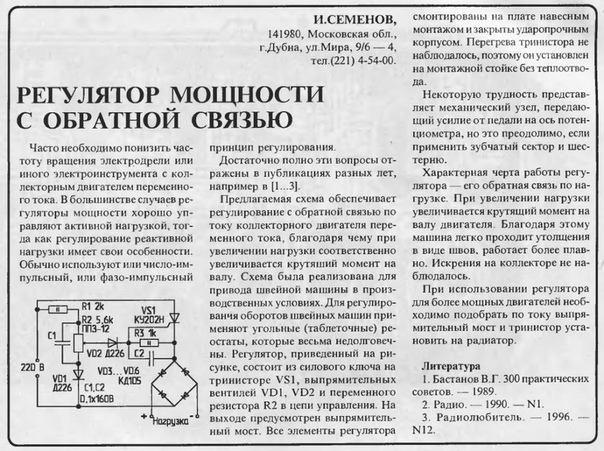 Я начинаю с центра и продвигаюсь вперед. Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Я начинаю с центра и продвигаюсь вперед. Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Таким образом, мы припаиваем все компоненты на свои места, используя ленту везде, где это необходимо. И через несколько минут у нас должна получиться идеально выглядящая печатная плата.
Теперь для теста подключаем стендовый блок питания и двигатель к плате. Затем включите питание. Я включаю плату, чтобы подать на нее питание, а затем, когда я настраиваю потенциометр, вал двигателя начинает вращаться. Скорость вращения может быть увеличена или уменьшена очень легко. Итак, у нас есть очень простой контроллер скорости двигателя постоянного тока с широтно-импульсной модуляцией.
Посмотрите один из видеороликов на экране, чтобы продолжить изучение электроники, и я застану вас на следующем уроке. Не забудьте подписаться на нас в Facebook, Instagram, LinkedIn, а также на Engineering mindset.com
Не забудьте подписаться на нас в Facebook, Instagram, LinkedIn, а также на Engineering mindset.com
(последний) Как сделать регулятор скорости двигателя постоянного тока в домашних условиях
Dipankar Das 30 октября 2021 г. Project
Привет и добро пожаловать, ребята, сегодня в этом посте я расскажу вам, как вы можете сделать регулятор скорости двигателя постоянного тока в домашних условиях. . Если вы ищете профессиональный ШИМ-контроллер двигателя постоянного тока, это правильное место для вас.
Для создания этого проекта вам необходимо знать о некоторых моментах, о которых я упоминал ниже этого блока.просто следуйте приведенным ниже инструкциям шаг за шагом, и вы сможете сделать свой собственный ШИМ-регулятор скорости двигателя постоянного тока у себя дома.
Чтобы облегчить вашу работу, я предоставлю вам бесплатный Gerber-файл ШИМ-контроллера двигателя постоянного тока, который я разработал. На этой печатной плате вы можете использовать управление двигателем до 10А. Чтобы сделать этот контроллер двигателя, просто выполните следующие шаги.
Купить
Компоненты для контроллера скорости двигателя постоянного тока
SL № Комплекты 1 1NF керамический конденсатор x 2 Купить 2 2 5 мм LED X 1 Купить 3 3 100K Cost X 1 Купить 4 IRFZ44N x 1 Купить 5 1k резистор x 4 купить 6 Купить 7 1N4148 Диод X 2 Купить 8 IN4007 Диод X 1 КУПИТЬ 9 3-контактный миниатюрный ползунковый переключатель x 1 КУПИТЬ 10 12 В постоянного тока J ack x 1 КУПИТЬСхема контроллера скорости двигателя постоянного тока
Разработанная печатная плата контроллера скорости двигателя постоянного тока
Скачать схему
Скачать файл Gerber
Смотреть видео на 12 90 03B00 PC бесплатно make ШИМ-регулятор скорости двигателя постоянного токаПрочитайте наши другие Руководство по созданию проекта ELectronics
Часто задаваемые вопросы о ШИМ-контроллере скорости двигателя постоянного тока
Как вы контролируете скорость двигателя постоянного тока?
Просто создайте схему ШИМ-контроллера двигателя постоянного тока, подключите его к двигателю постоянного тока и управляйте им.В этом посте я объяснил, как сделать контроллер двигателя постоянного тока в домашних условиях.
Как сделать схему управления двигателем?
С помощью этой статьи очень просто сделать схему управления двигателем. В этом посте я объяснил все о том, как сделать схему контроллера двигателя.
Как сделать регулятор скорости двигателя в домашних условиях?
Следуйте приведенным выше инструкциям, чтобы сделать регулятор скорости двигателя постоянного тока в домашних условиях. Сделать контроллер двигателя постоянного тока очень просто.
Сделать контроллер двигателя постоянного тока очень просто.
Проверьте также
В этом посте я расскажу вам, как сделать зарядное устройство для литий-ионных аккумуляторов на …
Как сделать регулятор скорости двигателя постоянного тока с помощью таймера NE555 IC
Что такое регулятор скорости двигателя постоянного тока?
Контроллер скорости двигателя постоянного тока представляет собой простую электронную схему, которая используется для линейного управления скоростью подключенного привода/двигателя постоянного тока путем простого вращения присоединенного потенциометра. Управление скоростью двигателя постоянного тока может быть достигнуто с помощью широкого набора электронных конфигураций.В этой статье мы сосредоточимся на том, как сделать регулятор скорости двигателя постоянного тока с использованием метода широтно-импульсной модуляции (ШИМ). Управление двигателем постоянного тока с помощью ШИМ имеет неотъемлемое преимущество, заключающееся в том, что потери мощности в переключающем транзисторе всегда малы из-за того, что транзистор либо полностью «ВКЛ», либо полностью «ВЫКЛ». В результате переключающий транзистор имеет уменьшенную рассеиваемую мощность, что обеспечивает линейный тип управления, что приводит к лучшей стабильности скорости. Еще одним преимуществом является то, что двигатель может вращаться намного медленнее без остановки.Поскольку амплитуда двигателя всегда остается постоянной
В результате переключающий транзистор имеет уменьшенную рассеиваемую мощность, что обеспечивает линейный тип управления, что приводит к лучшей стабильности скорости. Еще одним преимуществом является то, что двигатель может вращаться намного медленнее без остановки.Поскольку амплитуда двигателя всегда остается постоянной
Основой этой схемы является микросхема точного таймера NE555. ИС таймера 555 имеет частоту колебаний в диапазоне от 670 до 680 Гц. Здесь микросхема таймера NE555 работает в нестабильном режиме, чтобы генерировать свободно работающий прямоугольный сигнал ШИМ. Вы можете прочитать нашу предыдущую статью о нестабильных мультивибраторах, чтобы узнать больше об их работе.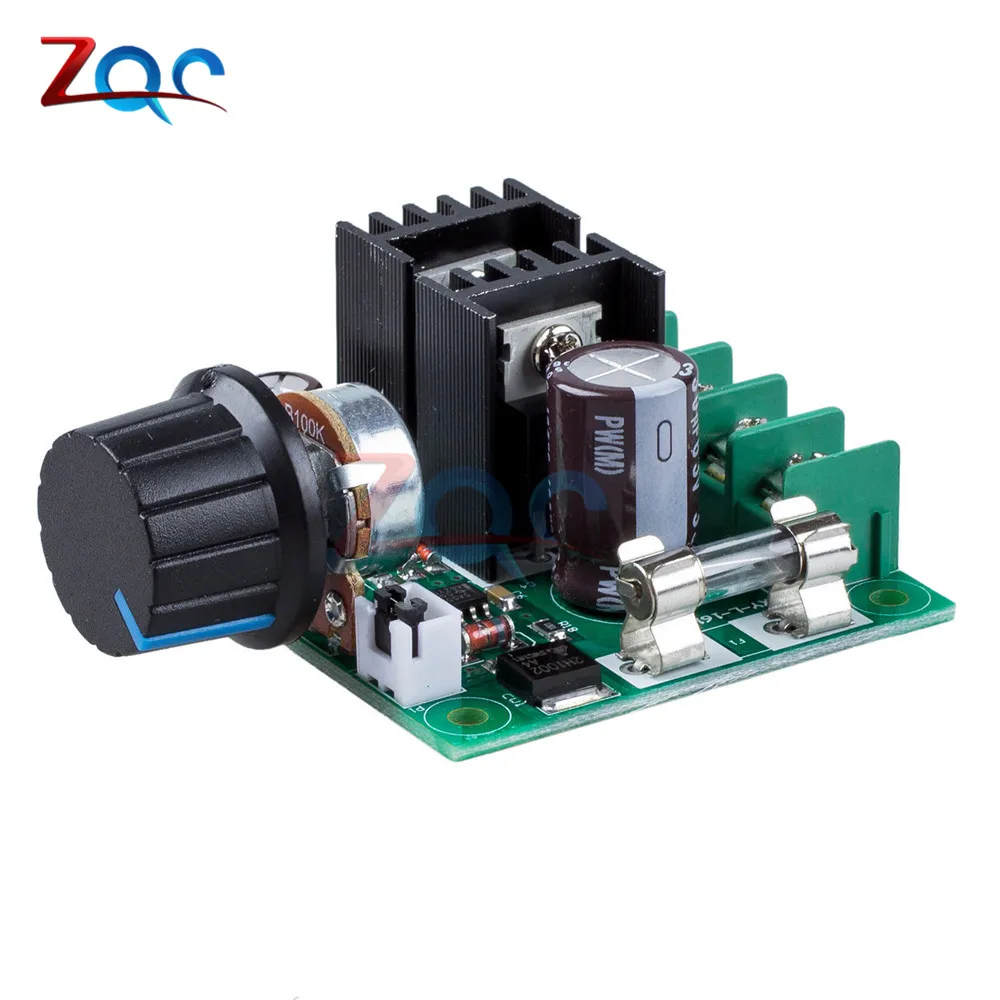
JLCPCB — передовая компания по производству и производству прототипов печатных плат в Китае, предоставляющая нам лучший сервис, который мы когда-либо испытывали в отношении (качество, цена, сервис и время).Мы настоятельно рекомендуем заказывать печатные платы у JLCPCB, все, что вам нужно сделать, это просто скачать файл Gerber и загрузить его на веб-сайт JLCPCB после создания учетной записи, как указано в видео выше, посетите их веб-сайт, чтобы найти больше! .
Аппаратные компоненты
Для сборки этого проекта вам понадобятся следующие детали:
555 Распиновка таймера
P75NF75 Распиновка
Полезные шаги
1) Припаять все резисторы
Купить изготовленные на заказ печатные платы по невероятно низкой цене 2 доллара за 5 печатных плат Посетите: www.jlcpcb.com
2) После этого припаяйте все диоды на плате Veroboard/PCB.
3) Теперь припаяйте все необходимые перемычки.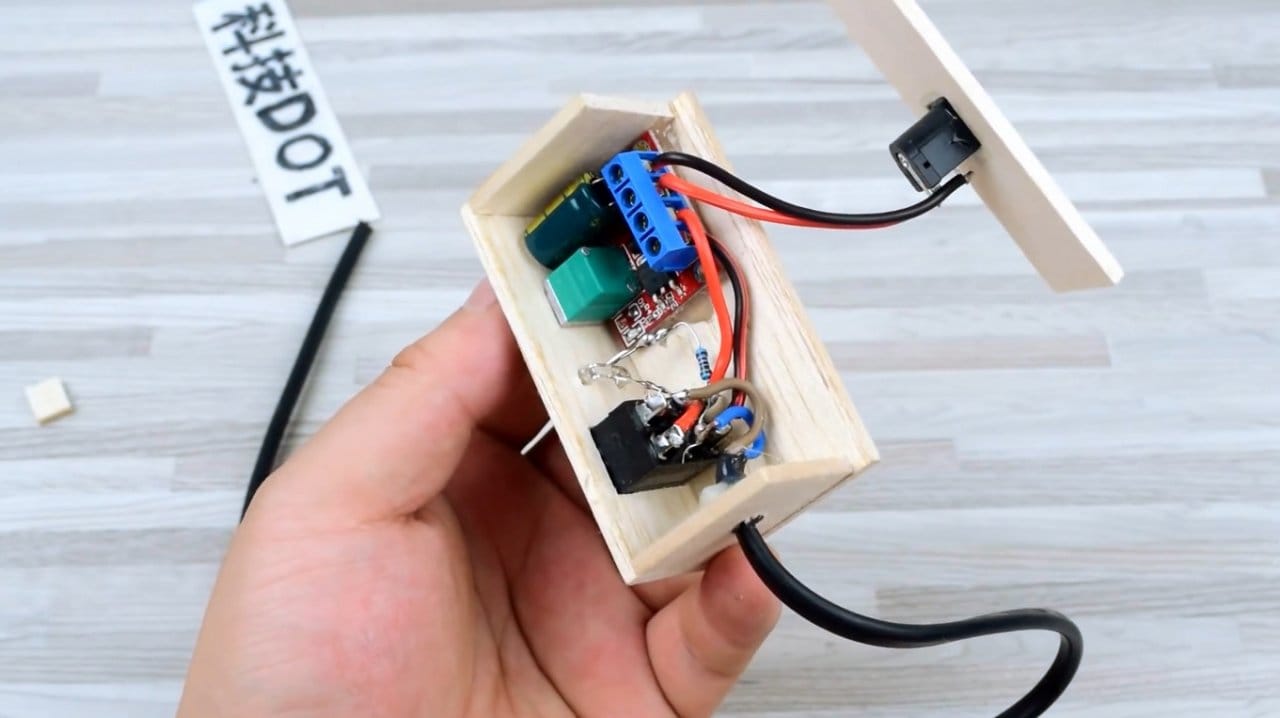
4) После этого припаиваем конденсаторы на плате.
5) Припаяйте микросхему таймера 555 и потенциометр 100K к плате.
6) Припаяйте силовой MOSFET P75NF75 на плате.
7) Припаяйте разъемы входного блока 12 В пост. тока и разъемы выходного блока двигателя постоянного тока.
8) Теперь включите питание и проверьте схему, используя батарею постоянного тока 12 В.
Принципиальная схема контроллера скорости двигателя постоянного тока
Рабочее объяснение
Работа этой схемы довольно проста. Здесь сигнал прямоугольной формы (ШИМ) используется для управления скоростью двигателя постоянного тока. Этот сигнал ШИМ генерируется при работе микросхемы таймера NE555 в режиме нестабильного мультивибратора. Предустановленный потенциометр 100K управляет активным временем выходного ШИМ-сигнала. Среднее выходное напряжение двигателя постоянного тока зависит от рабочего цикла ШИМ-сигнала.
Выходные импульсы ШИМ микросхемы таймера служат управляющим сигналом для входа затвора силового полевого МОП-транзистора P75NF75.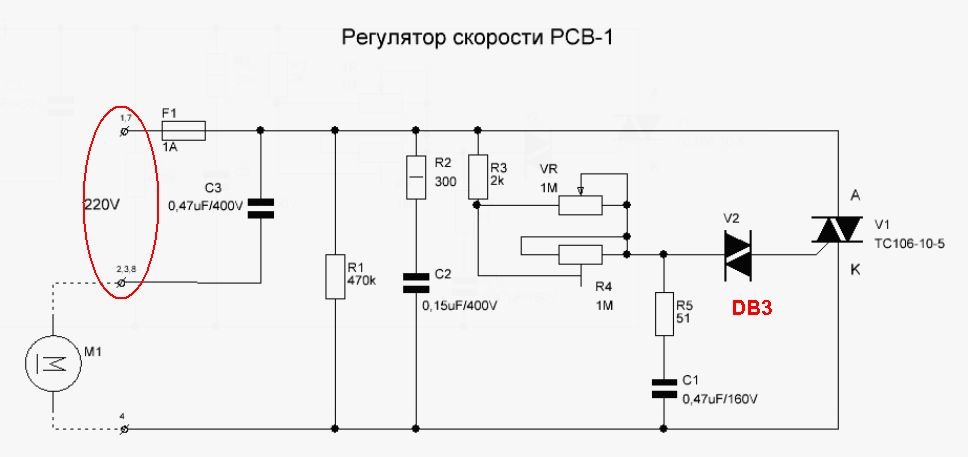 Затем МОП-транзистор реагирует и управляет подключенным двигателем постоянного тока в соответствии с настройкой предустановленного потенциометра 100K. Это позволяет МОП-транзистору управлять двигателем постоянного тока с высоким током.
Затем МОП-транзистор реагирует и управляет подключенным двигателем постоянного тока в соответствии с настройкой предустановленного потенциометра 100K. Это позволяет МОП-транзистору управлять двигателем постоянного тока с высоким током.
Приложения
- Используется в таких приложениях, как конвейерные ленты и эскалаторы, для устранения потерь мощности, когда система находится в состоянии простоя.
- Также используется в таких устройствах, как насосы и воздуходувки, для управления потоком и энергией.
Чтобы купить изготовленные на заказ печатные платы по удивительно низкой цене 2 доллара за 5 печатных плат Посетите: www.jlcpcb.com
См. также: Умный дверной замок с использованием пары ИК-светодиодов и серводвигателя | Контроллер двигателя/драйвер H-Bridge | Схема светодиодного прожектора с использованием транзисторов
Электронный регулятор скорости своими руками — Сделай свой собственный ESC
Часть I: Чертежи и процедура Этот самодельный электронный регулятор скорости (ESC) можно использовать в радиоуправляемом электромобиле, лодке или самолете. Он сделан из старого сервопривода и пары простых и доступных электронных компонентов.
Он сделан из старого сервопривода и пары простых и доступных электронных компонентов.
Это забавный проект, потому что вы можете переработать неиспользуемый сервопривод и, возможно, сэкономить несколько долларов.
Этот ESC не имеет реверса и схемы выпрямителя батареи (BEC).
Copyright2005 RC Airplane Advisor
Те, у кого есть опыт работы с электроникой, могут построить это просто по чертежу.
Для «остальных» вот простая процедура и фото готового контроллера. Мы создали несколько таких, поэтому мы постараемся помочь вам.
Если вы понятия не имеете, как паять или что такое резистор, и не хотите учиться, возможно, вам лучше купить уже готовый регулятор.![]() ..
..
1) МАТЕРИАЛЫ
— Старый сервопривод . Для этого идеально подходит один со сломанной зубчатой передачей («зачищенной»), так как сервоэлектроника (плата усилителя) часто бывает в хорошем состоянии.
— Усилитель(и) мощности . Усилитель мощности по сути представляет собой транзистор. МОП-транзисторы также будут работать для этой цели. Рекомендуемые усилители мощности: MJ11032 или 2N6282. Мы использовали последние, они поставляются в пакете с NTE251 на этикетке.
Приобретите их в местном магазине электроники (и мы не имеем в виду Circuit City! Найдите в Желтых страницах магазин, где продаются компоненты для схем). Один (1) усилитель (и один резистор) будет работать; если вам нужно нести более высокий ток, можно добавить больше усилителей и резисторов (мы обсудим это позже). Сообщается, что для полевых МОП-транзисторов работает IRF530.
— Резистор(ы) . 500 или 1000 Ом будут работать. Из того же магазина электроники или Radio Shack.
— Проволока . Калибр 12 или 13 может легко выдерживать десятки ампер. Гибкий силиконовый провод работает лучше всего. Если в магазине электроники его нет, загляните в отдел радиоуправляемых автомобилей в местном магазине товаров для хобби.
— Припой — Соединители . Две пары любых разъемов, которые вы в настоящее время используете на своих батареях и двигателях: PowerPoles, Deans и т. д. – Дополнительно : монтажная плата, радиатор, стяжки
2) ИНСТРУМЕНТЫ
— Паяльник — Нож или Кусачки / Инструмент для снятия изоляции — маленький Philips Отвертка
3) ПРОЦЕДУРА
-Используйте отвертку, чтобы разобрать корпус сервопривода.- Снимите шестерни сервопривода. -Отрежьте провода к серводвигателю и снимите его. — Оставьте печатную плату (усилитель) и потенциометр на месте. (Потенциометр [потенциометр или переменный резистор ] представляет собой круглую штуку с тремя клеммами внизу. В сервоприводе он используется в качестве устройства обратной связи для определения величины хода).
В сервоприводе он используется в качестве устройства обратной связи для определения величины хода).
— Припаяйте компоненты, как показано на схеме. Провода, показанные жирным шрифтом , должны быть проводами большого сечения (12 или 13), по которым проходит большая часть тока.
— На усилителе мощности два контакта на нижней стороне ближе к одному концу, чем к другому. На схеме показана нижняя сторона усилителя. Выводы обозначены на схеме как B (база или затвор), E (эмиттер или источник) и C (коллектор или сток).
— Один из проводов серводвигателя припаян к резистору. Оберните другой провод изолентой.
-Отрицательная клемма аккумулятора подключена к отрицательному проводу разъема сервопривода.В большинстве современных систем схема следующая: желтый (или белый) — сигнал, затем красный (или оранжевый) — плюс (средний провод), затем черный (или коричневый) — минус).
Имейте в виду, что некоторые старые системы имели странные условные обозначения (например, Airtronics, красный снаружи — положительный, черный посередине — отрицательный, затем черный (снова!) — сигнальный.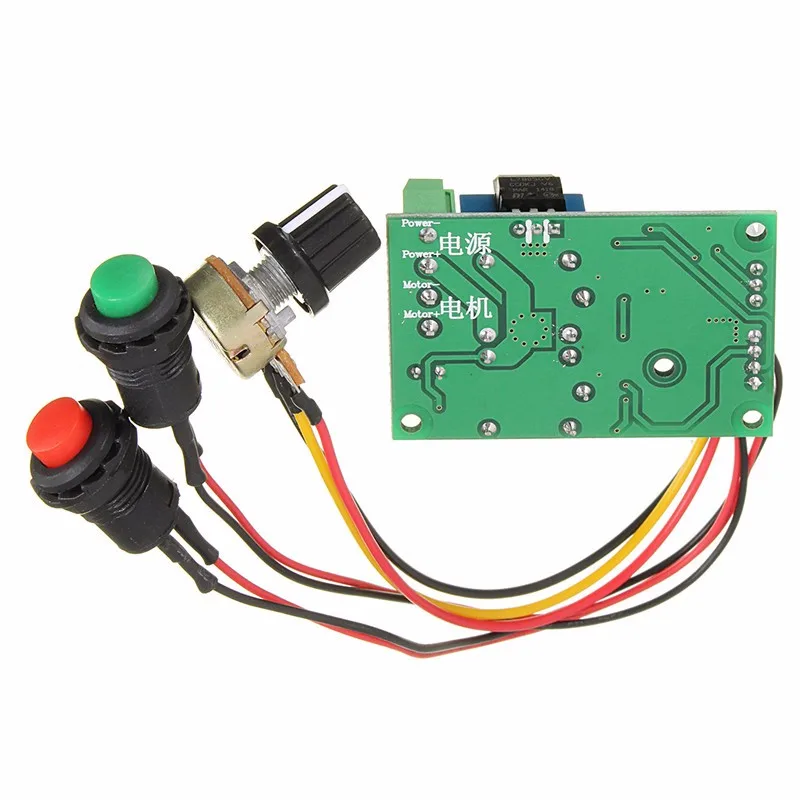 Если вы сомневаетесь, найдите схему подключения в руководстве по радиосистеме.
Если вы сомневаетесь, найдите схему подключения в руководстве по радиосистеме.
-Вставьте разъем сервопривода в дроссельный канал ресивера.Этот ESC не имеет BEC, а это означает, что вам нужно подключить отдельную батарею приемника (обычно 4 элемента NiCd или NiMH) в порт батареи приемника.
К части II: советы и фотографии.
Создание контроллера щеточного двигателя постоянного тока: обзор
Андрей СоловьевСоучредитель и технический директор Integra Sources Кандидат физико-математических наук
Контроллер играет важную роль в работе двигателя постоянного тока; его важность еще выше для мотора с расширенным функционалом.Моторы попроще могут обойтись и без этого устройства, но в этой статье мы о них говорить не будем.
Здесь мы более подробно рассмотрим контроллер щеточного двигателя постоянного тока (BDC), который представляет собой простое и легкое в сборке устройство.
Принципы работы двигателя BDC и его контроллера
Основные компоненты любого двигателя постоянного тока включают подвижную часть — ротор (или якорь) и статор, который всегда находится в состоянии покоя.
 Статор коллекторного двигателя постоянного тока может иметь либо обмотку (последовательные, шунтирующие, составные двигатели BDC), либо постоянные магниты (двигатели постоянного тока с постоянными магнитами).Третьим важным компонентом двигателя BDC является коммутатор со щетками, который соединяет ротор с источником питания постоянного тока.
Статор коллекторного двигателя постоянного тока может иметь либо обмотку (последовательные, шунтирующие, составные двигатели BDC), либо постоянные магниты (двигатели постоянного тока с постоянными магнитами).Третьим важным компонентом двигателя BDC является коммутатор со щетками, который соединяет ротор с источником питания постоянного тока.Ток, протекающий через ротор, создает вокруг него электромагнитное поле. Когда ротор начинает двигаться, одинаковые полюса магнитных полей, создаваемых вокруг статора и ротора, отталкиваются друг от друга и обеспечивают движение. Когда их противоположные полюса встречаются, коммутатор переключает ток, подаваемый на ротор. Это создает обратную полярность магнитного поля, и движение продолжается.
Коллекторный двигатель постоянного тока может использовать контроллер для запуска и остановки вращения, изменения его направления, управления скоростью и крутящим моментом. Для выполнения этих функций контроллер двигателя BDC регулирует ток и напряжение, подаваемые на двигатель. Коллекторные двигатели постоянного тока просты, экономичны и просты в управлении. Они идеально подходят для простых маломощных приложений.
Коллекторные двигатели постоянного тока просты, экономичны и просты в управлении. Они идеально подходят для простых маломощных приложений.
Проектирование контроллера двигателя BDC
Для проектирования контроллера двигателя BDC можно выбрать H-мост, который является традиционной схемой для устройств такого типа.Эта электронная схема имеет четыре переключателя размыкания/замыкания, которые поочередно подают положительное и отрицательное напряжение.
При замыкании переключателей верхнего и нижнего плеча по диагонали двигатель вращается в одном направлении. Направление вращения изменится, как только эти переключатели разомкнутся, а противоположные переключатели замкнуты.
Если вам нужен двигатель с однонаправленным вращением, вы можете построить контроллер, используя более простую схему только с одним переключателем открытия/закрытия. Выбирая транзисторный ключ, убедитесь, что он соответствует требуемым параметрам двигателя, например, максимальному току.В противном случае транзистор сгорит.
В качестве низковольтного контроллера можно выбрать мощные полевые МОП-транзисторы, которые обеспечивают высокую скорость переключения и высокий КПД по низкой цене. Создавая сильноточный контроллер двигателя BDC, вы можете использовать IGBT, которые обеспечивают высокий уровень тока и хорошо подходят для сложных систем силовой электроники.
Еще один вариант, который вы можете выбрать для своего проекта, — GaN-транзистор, устойчивый к высоким температурам и работающий в очень высоких диапазонах частот и напряжений.Тем не менее, стоимость его производства по-прежнему очень высока, поэтому это также повысит стоимость вашей схемы.
Можно использовать либо интегральную схему (ИС), либо дискретные компоненты. С точки зрения разработчика, микросхема контроллера двигателя постоянного тока является более простым и удобным решением. С дискретной схемой вам потребуется время и усилия для сборки и пайки компонентов.
У вас есть те же параметры для драйверов затвора, которые действуют как посредники между микроконтроллером (MCU) и коммутаторами.
 Интегрированный драйвер H-моста представляет собой схему со встроенными силовыми транзисторами. Несмотря на простоту и надежность конструкции, микросхема драйвера затвора предназначена для низковольтных и маломощных приложений. Кроме того, такие драйверы затворов не являются взаимозаменяемыми. Если они будут сняты с производства, вам придется переделывать схему вместе с печатной платой.
Интегрированный драйвер H-моста представляет собой схему со встроенными силовыми транзисторами. Несмотря на простоту и надежность конструкции, микросхема драйвера затвора предназначена для низковольтных и маломощных приложений. Кроме того, такие драйверы затворов не являются взаимозаменяемыми. Если они будут сняты с производства, вам придется переделывать схему вместе с печатной платой.Схема контроллера двигателя BDC может иметь различные конфигурации. Сооружая собственное устройство, следует учитывать технические требования и характеристики мотора.
Кратко пробежимся по аспектам дизайна, заслуживающим вашего внимания.
Тип сигналаВы можете создать цифровой или аналоговый контроллер. Основное различие между ними заключается в том, что первый включает в себя оборудование и прошивку на основе MCU. Вы можете комбинировать эти два типа сигналов и разработать устройство, которым можно будет управлять с помощью обоих.
Тип регулирования мощности
Контроллер двигателя BDC регулирует скорость и крутящий момент, изменяя мощность, подаваемую на двигатель. Этого можно добиться, используя либо линейный, либо импульсный регулятор напряжения. Линейный стабилизатор обеспечивает стабильное выходное напряжение и сохраняет его величину постоянной, независимо от входного напряжения, подаваемого источником питания.
Этого можно добиться, используя либо линейный, либо импульсный регулятор напряжения. Линейный стабилизатор обеспечивает стабильное выходное напряжение и сохраняет его величину постоянной, независимо от входного напряжения, подаваемого источником питания.
Импульсный стабилизатор использует метод широтно-импульсной модуляции (ШИМ) и подает напряжение импульсами, изменяя его скважность (отношение импульса к периоду импульса). Таким образом, вы можете регулировать скорость двигателя, регулируя различные рабочие циклы. Импульсный регулятор имеет более высокий КПД и меньшие потери мощности.
Тип управления
Некоторые типы контроллеров двигателей постоянного тока могут получать обратную связь от двигателей, обнаруживать ошибки и исправлять их, приводя значения в соответствие с заданными значениями. Они называются регуляторами с обратной связью или обратной связью. В качестве альтернативы, контроллер без обратной связи или без обратной связи не может повлиять на ситуацию, даже если произойдет сбой, поскольку он не обнаружит его. Вы можете найти такие контроллеры двигателей в простых системах, которые не нуждаются в автоматическом управлении.
Вы можете найти такие контроллеры двигателей в простых системах, которые не нуждаются в автоматическом управлении.
Характеристики двигателя
В зависимости от напряжения, необходимого для работы двигателя, вы можете выбрать регулятор низкого или высокого напряжения.Импульсный регулятор хорошо подходит для контроллеров с широким диапазоном рабочего напряжения. Линейный регулятор лучше подходит для низковольтного контроллера двигателя постоянного тока, поскольку чрезмерное входное напряжение может вызвать потерю мощности и даже тепловую перегрузку.
Мощность двигателя зависит от тока, подаваемого источником питания. Таким образом, маломощный двигатель BDC нуждается в маломощном контроллере и наоборот.
Проблемы создания контроллера двигателя BDC
Доступность и простота реализации двигателей BDC и их контроллеров делают их подходящим решением для многих проектов.Несмотря на простоту, конструкция контроллера щеточного двигателя постоянного тока все же может быть сопряжена с некоторыми проблемами.

Например, переключатели H-моста нельзя включать и выключать одновременно. Всегда будет момент, когда все транзисторы открыты. Это может привести к потере напряжения и мощности или даже к короткому замыканию, если включены противоположные верхний и нижний выключатели.
Чтобы избежать этой ситуации, вы можете ввести мертвое время, то есть время, когда все переключатели схемы Н-моста замкнуты.
Частота ШИМ (количество импульсов в секунду) является важным параметром, который необходимо правильно настроить. Слишком низкая или слишком высокая частота ШИМ приведет к неисправности контроллера и, следовательно, двигателя.
Чрезмерные электромагнитные помехи, вызванные постоянным переключением механического коммутатора, являются распространенной проблемой щеточного двигателя постоянного тока, и с ней тоже следует справляться.
Подробнее о контроллере двигателя BDC читайте здесь .
Теги
Похожие статьи
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, несмотря на то, что они являются одной из старейших конструкций электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21-го века?
Как они выдержали испытание временем, особенно против всех удивительных новых машин 21-го века?
Есть много возможных ответов на этот вопрос, но их хорошая управляемость является основной причиной, по которой двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его выводы.Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают достаточную производительность для своей стоимости. В этой статье будут рассмотрены некоторые распространенные контроллеры двигателей постоянного тока, принцип их работы и обсуждены самые популярные приложения для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам задавать желаемое поведение двигателя, даже если их механизмы для этого различаются.
В наших статьях о шунтирующих двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока подробно объясняется, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость/момент двигателей постоянного тока является обратно линейной, что означает, что их крутящий момент пропорционально уменьшается по мере увеличения оборотов двигателя.Это позволяет легко управлять, так как снижение скорости увеличивает крутящий момент, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются простым переключением их выводов, чтобы постоянный ток протекал в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять многими способами, включая контроллеры серводвигателей (подробнее см. в нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
H-мостовая схема — один из самых простых способов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
.
Рис. 1: H-мостовая схема для управления направлением вращения двигателя постоянного тока.
Имеется четыре переключателя, управляемых парами (1 и 4, 2 и 3), и когда любая из этих пар замкнута, они замыкают цепь и приводят двигатель в действие. Таким образом, 4-квадрантный двигатель можно создать, соединив вместе определенные переключатели, при этом смена полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который меняет направление вращения по команде.Они легко продаются в виде чипов и могут быть найдены в большинстве микропроцессорных контроллеров, поскольку H-мост можно уменьшить с помощью транзисторов до очень маленьких размеров.
По сути, эта схема переключает выводы двигателя постоянного тока, который меняет направление вращения по команде.Они легко продаются в виде чипов и могут быть найдены в большинстве микропроцессорных контроллеров, поскольку H-мост можно уменьшить с помощью транзисторов до очень маленьких размеров.
H-мосты могут не только изменять направление вращения двигателя, но и использоваться для управления скоростью. Если требуется только направленное управление, то H-мост будет использоваться в качестве так называемого нерекуперативного привода постоянного тока. Однако для создания рекуперативных приводов постоянного тока можно добавить больше сложности. На рис. 2 показан график, иллюстрирующий работу рекуперативных приводов:
.Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности на двигателе постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается торможение, когда они противостоят друг другу.
Большинство двигателей постоянного тока замедляются, просто отключая питание двигателя; рекуперативные приводы включают возможности торможения, когда переключение полярности во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «моторными» квадрантами, где двигатель обеспечивает ускорение в любом направлении и управляется нерекуперативными приводами.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и от этого выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, где его механическая энергия возвращает ток к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может перезаряжать источник питания, эффективно повышая эффективность двигателя. На рис. 3 показана упрощенная принципиальная схема для каждого квадранта, а также то, как квадранты 2 и 4 направляют ток обратно в источник для рекуперации энергии:
Рис.
 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и питания.Обратите внимание, как направление тока (I a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.
3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и питания.Обратите внимание, как направление тока (I a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое/используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время рекуперативное торможение исследуется в электромобилях и других приложениях, которым необходимо максимизировать эффективность. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM можно использовать во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, имитируя снижение/увеличение напряжения питания. Контроллеры привода с регулируемой скоростью посылают на двигатель периодические импульсы, которые в сочетании со сглаживающим эффектом, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого/более высокого напряжения. Например, если на двигатель 12 В подается ШИМ-сигнал высокого уровня (12 В) в течение двух третей каждого периода и низкого уровня (0 В) в оставшуюся часть, двигатель будет эффективно работать при двух третях полного напряжения. или 8 В.Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
Контроллеры привода с регулируемой скоростью посылают на двигатель периодические импульсы, которые в сочетании со сглаживающим эффектом, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого/более высокого напряжения. Например, если на двигатель 12 В подается ШИМ-сигнал высокого уровня (12 В) в течение двух третей каждого периода и низкого уровня (0 В) в оставшуюся часть, двигатель будет эффективно работать при двух третях полного напряжения. или 8 В.Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — изменить ток, подаваемый либо через катушку возбуждения, либо через якорь. Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (определяется током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличить сопротивление обмотки якоря, чтобы уменьшить скорость, или увеличить сопротивление статора, чтобы увеличить ее, регулируя сопротивление. Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (определяется током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличить сопротивление обмотки якоря, чтобы уменьшить скорость, или увеличить сопротивление статора, чтобы увеличить ее, регулируя сопротивление. Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Применение и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые должны ответить либо ваши исследования, либо поставщик. Контроллеры двигателей постоянного тока сложно определить из-за их разнообразия, поэтому приведенный ниже список вопросов будет надежным инструментом при выборе контроллера для вашего проекта.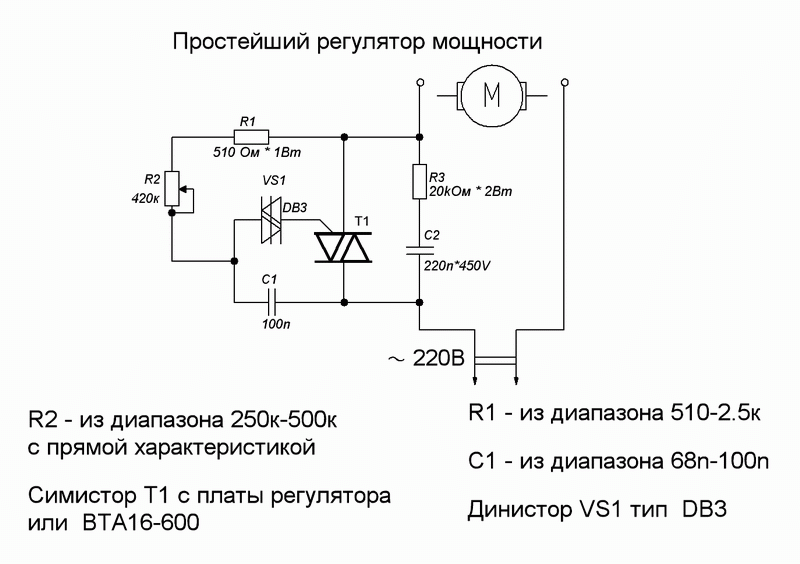 Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и ответьте на эти вопросы, чтобы сделать осознанный выбор:
Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и ответьте на эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинального напряжения для используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления требуется (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой непрерывный ток может обеспечить контроллер и соответствует ли он постоянному потреблению тока двигателем под нагрузкой?
- Имеет ли система встроенную защиту от перегрузки по току/тепловую защиту?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, R/C, аналоговое напряжение и т. д.))? Необходимо ли программное обеспечение?
- Вам нужен контроллер для двух двигателей (один контроллер для двух независимых двигателей)?
Доступно столько же контроллеров двигателей постоянного тока, сколько и самих двигателей постоянного тока; их изменчивость является одним из их самых сильных преимуществ. Их применения также столь же многочисленны, как и большинство разработчиков, получающих выгоду от того, что пользователь вносит какой-либо вклад в свой двигатель постоянного тока. В областях робототехники, производства, военного применения, автомобилей и многих других областях контроллеры двигателей постоянного тока используются с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут обеспечить простое средство управления с хорошей точностью по приемлемой цене.
Их применения также столь же многочисленны, как и большинство разработчиков, получающих выгоду от того, что пользователь вносит какой-либо вклад в свой двигатель постоянного тока. В областях робототехники, производства, военного применения, автомобилей и многих других областях контроллеры двигателей постоянного тока используются с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут обеспечить простое средство управления с хорошей точностью по приемлемой цене.
Резюме
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.
Источники:
- http://srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30. pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
 pdf
pdfДругие товары для двигателей
Еще из раздела Инструменты и элементы управления
Создайте ESC с помощью Arduino ДОМАШНЯЯ
Что нам нужно?Все цены низкие из-за покупки в Китае.Ваше дело ждать или нет.
1. Два транзистора MOSFET IRF3205 (упаковка 2: 1 €) LINK eBay
2. Три драйвера TSC428CPA (упаковка 10: 4 €) LINK eBay (я использовал IR2301, но это довольно дорого)
3. Три силовые диоды (упаковка 100: 1 €) ССЫЛКА eBay
4. Один конденсатор 100 мкФ 25 В (упаковка 20: 1 €) LINK eBay
5. Десять конденсаторов 0,1 мкФ размера 0805 (упаковка 100: 1 €) ССЫЛКА eBay
6. Шесть конденсаторов 22 мкФ (упаковка 10: 1 €) LINK eBay
Шесть конденсаторов 22 мкФ (упаковка 10: 1 €) LINK eBay
7. Десять конденсаторов 22 пФ (упаковка 100: 1 €) LINK eBay
8. Резистор размера 0805: 100, 1 кОм 2 кОм (упаковка 100: 1 €) ССЫЛКА eBay
9.Регулятор напряжения ams1117 5 В (упаковка 10: 1 €) ССЫЛКА eBay
10. Гнездовой и штекерный контакты печатной платы (упаковка 10: 1 €) LINK eBay
11. Огромный конденсатор 4700 мкФ 16 В (1 €) LINK eBay
12. Arduino NANO (2€)
13. Провода, разъемы, припой, паяльник… (0€)
Знакомство!
Всякий раз, когда у нас есть система с микроконтроллером, воздействующим на двигатели, мы обязательно обнаружим проблемы с напряжением и током. Микропроцессоры обычно работают при напряжении 3.3 или 5 вольт и использовать очень низкую мощность. Вместо этого моторы — звери, чья основная пища — ток. В проекте, в котором используются двигатели, мы можем потреблять более 20 А, и ни один микроконтроллер не выдаст такой ток. Поэтому нам нужно отделить высокоамперную 12-вольтовую часть нашей схемы от низковольтной 5-вольтовой части. Когда я говорю «двигатели», я имею в виду трехфазные бесщеточные двигатели. При наличии трехфазных двигателей все усложняется по сравнению с простым двигателем постоянного тока. Мы должны подать питание на 3 входа двигателя в очень точной последовательности.Чтобы сгенерировать эту последовательность высокого или низкого состояния входов двигателя, мы будем использовать ESC (электронное управление скоростью).
Поэтому нам нужно отделить высокоамперную 12-вольтовую часть нашей схемы от низковольтной 5-вольтовой части. Когда я говорю «двигатели», я имею в виду трехфазные бесщеточные двигатели. При наличии трехфазных двигателей все усложняется по сравнению с простым двигателем постоянного тока. Мы должны подать питание на 3 входа двигателя в очень точной последовательности.Чтобы сгенерировать эту последовательность высокого или низкого состояния входов двигателя, мы будем использовать ESC (электронное управление скоростью).
На анимации выше видно, что нам нужно переключить 3 входа h2, h3 и h4 в определенной последовательности. Мы назовем 3 входа, вход A, B и C. Последовательность, которую нам нужно создать, следующая:
Где высокие затворы относятся к транзисторам, подключенным к Vdd, а низкие затворы к транзисторам, подключенным к GND в наших трех -фазовый мост, который мы видим ниже.Пины представляют соединения с микроконтроллером.
Схема трехфазного моста!
Немного дополнительной информации
Рассмотрим общую схему электронного регулятора скорости и разделим ее на три части. Прежде всего нам нужен микроконтроллер, который будет частью микропроцесса. Микроконтроллер обрабатывает данные и решает, какой сигнал должен быть отправлен следующей части, драйверам. Функция этих драйверов заключается в подаче необходимого напряжения на затворы мосфет-транзисторов третьей части, называемой трехфазным мостом, и открытии или закрытии протекания тока через эти транзисторы.Наконец, третья секция носит название трехфазного моста. Мы должны запитать трехфазный двигатель в определенной последовательности и пропустить ток через обмотки двигателя. Открывая и закрывая 6 транзисторов очень точным образом, мы могли добиться желаемой последовательности, чтобы вращать двигатель.
Как уже упоминалось, схема очень общая. Чтобы постоянно синхронизировать скорость вращения двигателя с нашей сгенерированной последовательностью, нам нужно контролировать положение двигателя и сравнивать его с желаемым положением. Для этого мы измеряем ЭДС или электромагнитное поле, создаваемое вращением двигателя, подобно тому, как динамо-магниты создают определенную электромагнитную силу в обмотках двигателя. Измеряя падение напряжения на клеммах двигателя, мы можем провести точный микропроцесс и узнать положение двигателя и синхронизировать каждый оборот.
Для этого мы измеряем ЭДС или электромагнитное поле, создаваемое вращением двигателя, подобно тому, как динамо-магниты создают определенную электромагнитную силу в обмотках двигателя. Измеряя падение напряжения на клеммах двигателя, мы можем провести точный микропроцесс и узнать положение двигателя и синхронизировать каждый оборот.
6 шагов последовательности вращения двигателя:
Чтобы лучше понять внутреннюю функцию трехфазного бесщеточного двигателя, мы посмотрим на рисунок выше.Мы знаем, что двигатель имеет число витков, кратное трем. Катушки равномерно распределены по периметру двигателя. Таким образом, между каждой катушкой будет 360 градусов, деленных на количество катушек. В нашем случае двигатель это 12 катушек, по 4 катушки на каждый из 3 входов. На приведенном выше рисунке они представлены только одной катушкой для каждого входа. Движущейся частью двигателя может быть внешний или внутренний вал, в данном случае внешний. Вокруг подвижной части нам нужно разместить несколько сильных магнитов так же, как и 12 катушек, на равном расстоянии друг от друга.Мы знаем, что при протекании тока через катушки создается магнитное поле в зависимости от направления протекания тока. Чередуя направление тока через катушки, мы меняем полярность электромагнитного поля, создаваемого таким образом, что в определенные моменты времени между катушками и магнитами будут противоположные полюса. Глядя на рисунок, мы видим, что мы начинаем переключать верхний вентиль «C» и нижний вентиль «A». Таким образом, мы заставляем ток течь от С к А, создавая магнитное поле через две катушки.Это создаваемое поле противоположно полю магнитов и создает толкающую силу, которая перемещает ось интервала вперед (360/12 градусов). Как раз в тот момент, когда катушки проходят через одну середину другой, следующий магнит должен переключиться в следующее состояние, поэтому мы должны заставить ток течь от A к B и так далее, создавая бесконечный цикл, который повторяется каждые 6 состояний.
Движущейся частью двигателя может быть внешний или внутренний вал, в данном случае внешний. Вокруг подвижной части нам нужно разместить несколько сильных магнитов так же, как и 12 катушек, на равном расстоянии друг от друга.Мы знаем, что при протекании тока через катушки создается магнитное поле в зависимости от направления протекания тока. Чередуя направление тока через катушки, мы меняем полярность электромагнитного поля, создаваемого таким образом, что в определенные моменты времени между катушками и магнитами будут противоположные полюса. Глядя на рисунок, мы видим, что мы начинаем переключать верхний вентиль «C» и нижний вентиль «A». Таким образом, мы заставляем ток течь от С к А, создавая магнитное поле через две катушки.Это создаваемое поле противоположно полю магнитов и создает толкающую силу, которая перемещает ось интервала вперед (360/12 градусов). Как раз в тот момент, когда катушки проходят через одну середину другой, следующий магнит должен переключиться в следующее состояние, поэтому мы должны заставить ток течь от A к B и так далее, создавая бесконечный цикл, который повторяется каждые 6 состояний.
Как обнаружить BEMF и синхронизировать нашу последовательность:
Мы знаем, что магнит создает вокруг себя магнитное поле.Как только вы поместите катушку перед ним, движение изменяет поток поля через катушку, создавая ток через обмотки. Чем больше поле проходит через катушку, тем выше сила тока, проходящего через обмотку, и более высокое напряжение может падать на клеммы. Давайте посмотрим на следующий пример обнаружения BEMF:
На приведенном выше рисунке мы видим, что верхние ворота выхода A и нижние ворота выхода B активированы. Это создает ток от катушек A к катушкам B в направлении трех серых стрелок.Этот ток создает одинаковое магнитное поле в катушках A и B. Это магнитное поле будет толкать противоположное магнитное поле внешних магнитов, вращающих двигатель. В этом примере мы называем красный цвет магнитов поляризованным на юг, а синий — на север. Наблюдаем за синими стрелками, выходящими из синего магнита. Давайте посмотрим на катушку C на данный момент. Эти силовые линии еще не пересекают катушку C. Мы видим, что почти все линии поля выходят за пределы катушки, но на следующем рисунке через несколько мгновений мы видим, что катушку пересекают несколько линий.Таким образом, на созданный поток тока влияет вращение двигателя. Это дает нам изменение напряжения VC-FB, которое мы можем измерить с помощью нашего АЦП микроконтроллера. По мере того, как силовые линии становятся более перпендикулярными к катушке, ток с каждым разом увеличивается, и, следовательно, это падение напряжения.
Эти силовые линии еще не пересекают катушку C. Мы видим, что почти все линии поля выходят за пределы катушки, но на следующем рисунке через несколько мгновений мы видим, что катушку пересекают несколько линий.Таким образом, на созданный поток тока влияет вращение двигателя. Это дает нам изменение напряжения VC-FB, которое мы можем измерить с помощью нашего АЦП микроконтроллера. По мере того, как силовые линии становятся более перпендикулярными к катушке, ток с каждым разом увеличивается, и, следовательно, это падение напряжения.
На следующем рисунке мы видим, что силовые линии полностью пересекают катушку C. Это означает, что поток поля максимален, как и ток в катушке C. Это именно тот момент, когда нам нужно перейти к следующему шагу нашей последовательности.Если мы сможем точно определить этот момент с помощью нашего микроконтроллера, мы сможем перейти к следующей части нашей последовательности в нужный момент. Как мы могли видеть, у нас есть падение напряжения в неактивированной катушке, которое зависит от движения двигателя.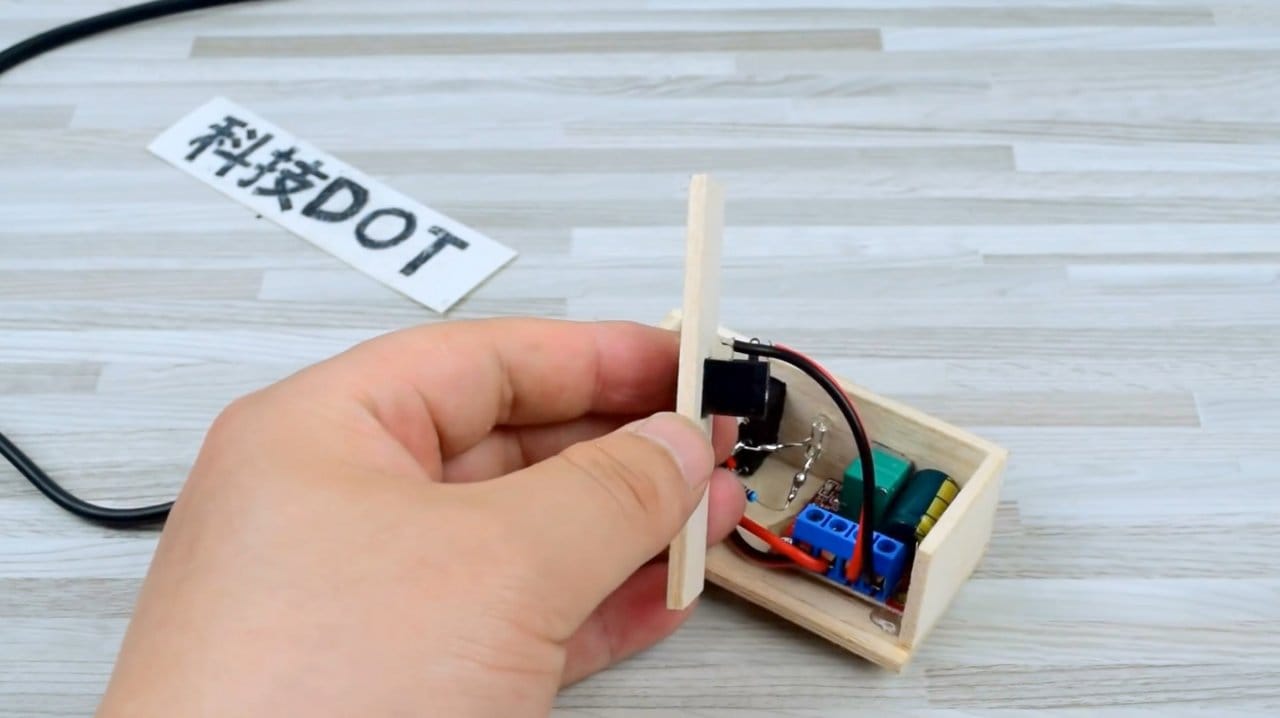 Мы можем измерить это падение напряжения с помощью нашего АЦП и сравнить его со средним напряжением всех трех катушек. Когда мы обнаружим это максимальное напряжение, мы сможем изменить последовательность.
Мы можем измерить это падение напряжения с помощью нашего АЦП и сравнить его со средним напряжением всех трех катушек. Когда мы обнаружим это максимальное напряжение, мы сможем изменить последовательность.
Начнем
Мы уже знаем, что нам нужно делать. Установите трехфазный мост, подключите микроконтроллер и прочитайте выходы BEMF двигателя и создайте последовательность переключения в зависимости от этого считывания BEMF.Первым делом создаем схему в программе Design Spark. Вы можете использовать любую программу проектирования печатных плат. Чтобы схема импортировала все указанные компоненты. Выполните соединения и создайте печатную плату.
Посмотрите следующее видео и узнайте, как создать печатную плату в Design Spark:
