По какой траектории вы можете выполнить разворот: Все вопросы под номером 9 из билетов ПДД онлайн
Билет 39 вопрос 9 ПДД CD 2022 онлайн
… Билет 39 CD
Билет 39 — Вопрос 1
В каком виде предусмотрено представление для проверки страхового полиса обязательного страхования гражданской ответственности?
1. На бумажном носителе.
2. В виде электронного документа или его копии на бумажном носителе.
3. В любом из перечисленных видов.
Страховой полис может быть представлен на бумажном носителе, а в случае заключения договора такого обязательного страхования в порядке, установленном пунктом 7.2 статьи 15 указанного Федерального закона, в виде электронного документа или его копии на бумажном носителе (п. 2.1.11).Правильный ответ:
В любом из перечисленных видов.
Билет 39 — Вопрос 2
Этот знак предупреждает о приближении к тоннелю, в котором:
1. Будет затруднен разъезд со встречными транспортными средствами.
2. Отсутствует искусственное освещение.
3.
Правильный ответ:
Отсутствует искусственное освещение.
Билет 39 — Вопрос 3
Вы имеете право продолжить движение на перекрестке:
1. Только в направлении В.
2. В направлениях А и В.
3. Во всех указанных направлениях, кроме Г.
Из четырех предложенных направлений Вы можете двигаться только в двух — А и В. Поворот направо на перекрестке (направление Г) запрещен знаком 3.18.1 «Поворот направо запрещен». При движении в направлении Б Вы оказались бы левее разделительной полосы, т.е. на проезжей части, предназначенной для встречного движения (п. 1.4). Правильный ответ:В направлениях А и В.
Билет 39 — Вопрос 4
Какие из указанных знаков разрешают выполнить поворот налево?
1. Только А.
Только А.
2. А и Б.
3. Б и В.
4. Все.
Повернуть налево Вам разрешают все знаки: знак А (3.19 «Разворот запрещен»), не запрещающий поворот налево; Б (6.8.3 «Тупик»), информирующий, что данная дорога не имеет сквозного проезда; В (5.13.2 «Выезд на дорогу с полосой для маршрутных транспортных средств»), показывающий, что на левой полосе, навстречу основному потоку ТС, осуществляется движение автобусов и (или) троллейбусов.Правильный ответ:
Все.
Билет 39 — Вопрос 5
При наличии данной разметки, нанесенной на полосе движения, Вам разрешено выполнить:
1. Только поворот налево.
2. Только разворот.
3. Поворот налево и разворот.
Правильный ответ:
Поворот налево и разворот.
Билет 39 — Вопрос 6
Вам можно двигаться:
1. Только налево.
Только налево.
2. Налево и в обратном направлении.
3. В любом направлении.
Если регулировщик обращен к Вам левым боком, а правая рука вытянута вперед, движение разрешено во всех направлениях: прямо, направо, налево и в обратном направлении (п. 6.10).Правильный ответ:
В любом направлении.
Билет 39 — Вопрос 7
Какие внешние световые приборы должны быть включены на транспортном средстве, имеющем опознавательные знаки «Перевозка детей», при посадке и высадке из него детей?
1. Габаритные огни.
2. Ближний свет фар или противотуманные фары.
3. Аварийная сигнализация.
Аварийная сигнализация должна быть включена при посадке детей в ТС, имеющее опознавательные знаки «Перевозка детей», и высадке из него (п. 7.1).Правильный ответ:
Аварийная сигнализация.
Билет 39 — Вопрос 8
Водитель маломестного автобуса, выполняющий перестроение на правую полосу, в данной ситуации:
1. Не должен создавать помехи двигающемуся по правой полосе автомобилю.
Не должен создавать помехи двигающемуся по правой полосе автомобилю.
2. Имеет преимущество, поскольку завершает обгон.
3. Имеет преимущество, так как на автобусе включены указатели правого поворота.
Водитель маломестного автобуса, выполняющий перестроение, в том числе завершающий обгон, не должен создавать помех автомобилю, движущемуся попутно без изменения направления движения (п. 8.4).Правильный ответ:
Билет 39 — Вопрос 9
Разрешается ли Вам выполнить разворот в указанном месте?
1. Разрешается.
2. Разрешается при видимости дороги не менее 100 м.
3. Запрещается.
Предупреждающий знак 1.22 «Пешеходный переход», установленный вне населенного пункта за 150 — 300 м до пешеходного перехода, не запрещает разворот. Следовательно, Вам разрешается выполнить разворот, если видимость дороги не менее 100 м (п. 8.11).Вопрос:
Знак устанавливается за 150 — 300 м, значит, видимость уже более 100 м?
Ответ:
Знак «Пешеходный переход», может быть установлен, например, за 250 м до перехода, а сам переход будет за поворотом. А поворот направо будет, например, через 90 м от автомобиля. Значит, «Разрешается при видимости дороги не менее 100 м» — правильный ответ.
А поворот направо будет, например, через 90 м от автомобиля. Значит, «Разрешается при видимости дороги не менее 100 м» — правильный ответ.
Правильный ответ:
Разрешается при видимости дороги не менее 100 м.
Билет 39 — Вопрос 10
С какой максимальной скоростью Вы имеете право продолжить движение на грузовом автомобиле с разрешенной максимальной масой более 3,5 т?
1. 50 км/ч.
2. 70 км/ч.
3. 90 км/ч.
4. 110 км/ч.
Двигаясь по автомагистрали (знак 5.1 «Автомагистраль») на грузовом автомобиле с разрешенной максимальной масой более 3,5 т, Вы можете развивать скорость не более 90 км/ч (п. 10.3).Правильный ответ:
90 км/ч.
Билет 39 — Вопрос 11
По какой траектории водителю маломестного автобуса можно выполнить обгон?
1. Только по А.
2. Только по Б.
3. По любой из указанных.
Водители ТС приближаются к нерегулируемому перекрестку равнозначных дорог. Обгон запрещен на нерегулируемых перекрестах при движении по дороге, не являющейся главной (п. 11.4). Следовательно, обгон можно совершить только до перекрестка (по траектории А).
Обгон запрещен на нерегулируемых перекрестах при движении по дороге, не являющейся главной (п. 11.4). Следовательно, обгон можно совершить только до перекрестка (по траектории А).Только по А.
Билет 39 — Вопрос 12
Разрешается ли Вам остановка в указанном месте?
1. Разрешается.
2. Разрешается только для загрузки или разгрузки транспортного средства.
3. Запрещается.
Вы не можете остановиться в указанном месте, так как знак 5.11.2 «Дорога с полосой для велосипедистов» и разметка 1.23.3 (изображение велосипеда) информируют о том, что на этой дороге движение велосипедов и мопедов осуществляется по велосипедной полосе навстречу общему потоку ТС. Другим ТС движение по такой полосе и остановка на ней запрещены (пп. 9.9 и 12.4).Правильный ответ:
Запрещается.
Билет 39 — Вопрос 13
Вы намерены проехать перекресток в прямом направлении. Ваши действия?
1.
2. Проедете первым, руководствуясь знаком «Главная дорога».
3. Уступите дорогу трамваю.
В данной ситуации порядок движения определяется не знаками приоритета, а сигналами светофора, т.е. перекресток является регулируемым (пп. 6.15 и 13.3). Когда сигналы светофора разрешают движение одновременно трамваю и безрельсовым ТС, трамвай имеет преимущество независимо от направления его движения (п. 13.6). Следовательно, Вам необходимо уступить дорогу трамваю.Правильный ответ:
Уступите дорогу трамваю.
Билет 39 — Вопрос 14
Как Вам следует поступить при повороте налево?
1. Уступить дорогу легковому автомобилю.
2. Проехать перекресток первым.
Руководствуясь правилами проезда перекрестков равнозначных дорог, Вы обязаны уступить дорогу легковому автомобилю, так как он приближается справа (п. 13.11).Правильный ответ:
Уступить дорогу легковому автомобилю.
Билет 39 — Вопрос 15
Кому Вы должны уступить дорогу при движении прямо?
1. Легковому автомобилю и мотоциклу.
2. Только легковому автомобилю.
3. Никому.
На этом перекрестке неравнозначных дорог (знаки 2.1 «Главная, дорога» и 8.13 «Направление главной дороги») Вы должны уступить дорогу только приближающемуся справа легковому автомобилю, который, так же, как и Вы, находится на главной дороге, поэтому разъезжаться с ним следует по правилам проезда перекрестков равнозначных дорог (пп. 13.10 и 13.11). Мотоцикл и грузовой автомобиль уступают дорогу Вам, так как находятся на второстепенных дорогах (п. 13.9).Правильный ответ:
Только легковому автомобилю.
Билет 39 — Вопрос 16
Нарушил ли водитель Правила при вынужденной остановке на автомагистрали?
1. Нарушил.2. Нарушил, если не выставил знак аварийной остановки.
3. Не нарушил.
Водитель остановился на автомагистрали в месте, где остановка запрещена (п. 16.1). В соответствии с требованиями Правил при вынужденной остановке водитель обязан не только остановиться за сплошной линией разметки (п. 16.2) и включить аварийную сигнализацию (п. 7.1), но и выставить на расстоянии не менее 30 м от ТС знак аварийной остановки (п. 7.2).
16.1). В соответствии с требованиями Правил при вынужденной остановке водитель обязан не только остановиться за сплошной линией разметки (п. 16.2) и включить аварийную сигнализацию (п. 7.1), но и выставить на расстоянии не менее 30 м от ТС знак аварийной остановки (п. 7.2).Вопрос:
Знака аварийной остановки на рисунке нет, значит водитель нарушил ПДД.
Ответ:
Знак аварийной остановки вне населенных пунктов устанавливается на расстоянии не менее 30 м от транспортного средства (п. 7.2). На рисунке расстояние до автомобиля явно менее 30 м. Водитель уже мог выставить знак аварийной остановки, но мы его не видим. Поэтому правильный ответ — 2. Нарушил, если не выставил знак аварийной остановки.
Нарушил, если не выставил знак аварийной остановки.
Билет 39 — Вопрос 17
Разрешается ли буксировка в гололедицу, если у буксируемого транспортного средства исправны тормоза и рулевое управление?
1. Разрешается.
2. Разрешается только на жесткой сцепке или методом частичной погрузки.
3. Запрещается.
Независимо от исправности тормозов и рулевого управления буксировка в гололедицу разрешается только на жесткой сцепке или методом частичной погрузки (п. 20.4). Буксировка на гибкой сцепке запрещена, так как велика вероятность заноса при торможении либо трогании с места.Правильный ответ:
Разрешается только на жесткой сцепке или методом частичной погрузки.
Билет 39 — Вопрос 18
Разрешается ли устанавливать на транспортном средстве ошипованные шины совместно с неошипованными?
1. Разрешается.
2. Разрешается только на разные оси.
3. Запрещается.
Устанавливать на ТС ошипованные шины совместно с неошипованными не разрешается (Перечень, п. 5.5).Правильный ответ:
Запрещается.
Билет 39 — Вопрос 19
При постановке грузового автомобиля с разрешенной максимальной массой более 3,5 т на стоянку для исключения его самопроизвольного движения на подъеме или спуске следует:
1. Использовать стояночный тормоз.
Использовать стояночный тормоз.
2. Установить противоткатные упоры.
3. Осуществить оба перечисленных действия.
При постановке на стоянку грузового автомобиля с разрешенной максимальной массой более 3,5 т на подъеме или спуске следует не только использовать стояночный тормоз, но и дополнительно установить противооткатные упоры, которых должно быть не менее двух (Перечень, п.7.7).Правильный ответ:
Осуществить оба перечисленных действия.
Билет 39 — Вопрос 20
Что понимается под остановочным путем?
1. Расстояние, пройденное транспортным средством с момента обнаружения водителем опасности до полной остановки.
2. Расстояние, пройденное транспортным средством с момента нажатия на педаль тормоза до полной остановки.
3. Расстояние, пройденное транспортным средством с момента начала срабатывания тормозного привода до полной остановки.
Под остановочным путем понимается расстояние, пройденное ТС с момента обнаружения водителем опасности до полной остановки.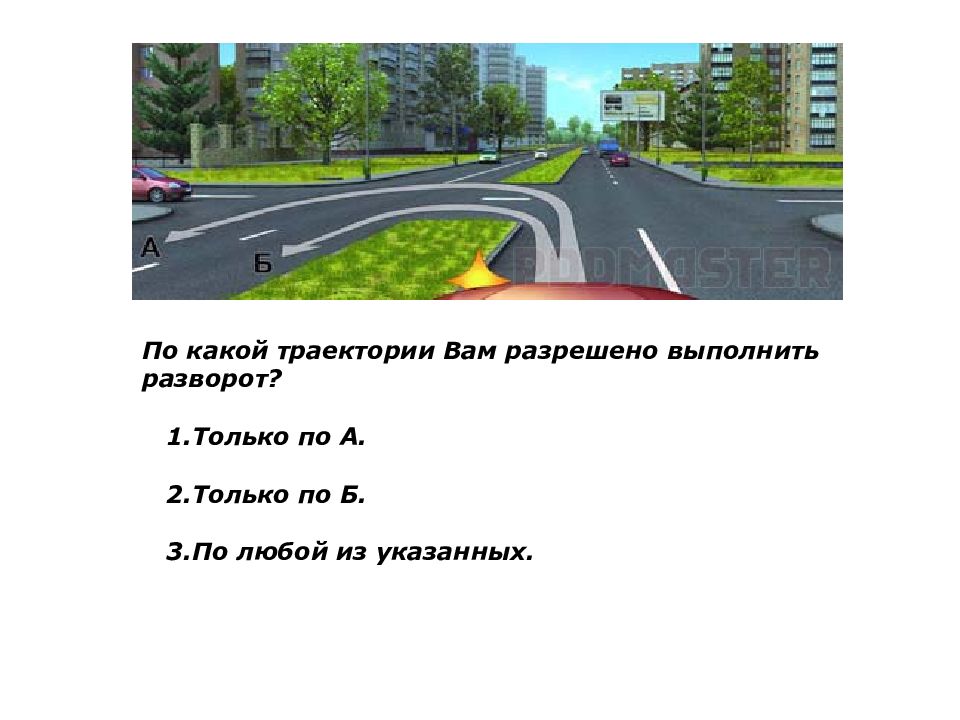 Остановочный путь всегда больше тормозного, так как до начала торможения ТС успевает переместиться на расстояние, зависящее от времени реакции водителя и времени срабатывания тормозного привода.
Остановочный путь всегда больше тормозного, так как до начала торможения ТС успевает переместиться на расстояние, зависящее от времени реакции водителя и времени срабатывания тормозного привода.
Правильный ответ:
Расстояние, пройденное транспортным средством с момента обнаружения водителем опасности до полной остановки.
Пройти билет № 39
Соответствует ли действия водителя правилам если он. По какой траектории Вам разрешено выполнить разворот
Билет 13 — Вопрос 1
Соответствуют ли действия водителя Правилам, если он движется посередине дороги?
1. Соответствуют.
2. Соответствуют, если отсутствуют встречные транспортные средства.
3. Не соответствуют.
В данной ситуации действия водителя не соответствуют Правилам, поскольку на всех дорогах установлено правостороннее движение (п. 1.4). Следовательно, водитель ТС обязан двигаться по правой стороне дороги.
Правильный ответ:
Не соответствуют.
Билет 13 — Вопрос 2
Как следует поступить, если Вам необходимо развернуться?
1. Развернуться на этом перекрестке при отсутствии на нем других транспортных средств.
2. Проехать прямо и развернуться за перекрестком.
3. Проехать прямо и развернуться только на следующем перекрестке.
На этом перекрестке пересекаемая дорога имеет одну проезжую часть, следовательно, знак 4.1.1 «Движение прямо» запрещает Вам разворот на перекрестке. Этот знак не вводит каких-либо ограничений на следующий за перекрестком участок дороги, где и можно развернуться.
Правильный ответ:
Проехать прямо и развернуться за перекрестком.
Билет 13 — Вопрос 3
Разрешена ли Вам стоянка в указанном месте?
1. Разрешена.
2. Разрешена только с включенной аварийной сигнализацией.
Правильный ответ:
Непосредственно перед началом маневра.
Билет 13 — Вопрос 8
Из какой полосы разрешено въехать на данный перекресток?
1. Только из правой.
Только из правой.
2. Только из левой.
3. Из любой.
При въезде на перекресток с круговым движением (знак 4.3 «Круговое движение») поворот направо Вам можно производить не только из крайней правой, но и из левой полосы (п. 8.5).
Правильный ответ:
Из любой.
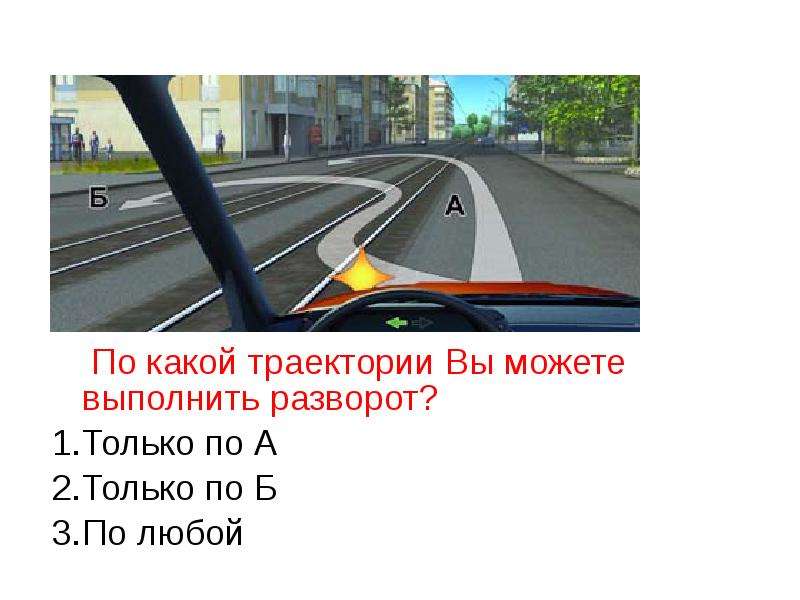
Билет 13 — Вопрос 9
Разрешается ли Вам выполнить разворот на этом участке дороги?
1. Разрешается.
2. Разрешается только при видимости дороги не менее 100 м.
На данном участке дороги нет ни знаков, ни разметки, запрещающих разворот. Но, поскольку впереди поворот дороги, разворот возможен лишь при видимости дороги не менее 100 м (п. 8.11).
Правильный ответ:
Разрешается только при видимости дороги не менее 100 м.
Билет 13 — Вопрос 10
С какой максимальной скоростью Вы имеете право продолжить движение на легковом автомобиле?
Правильный ответ:
90 км/ч.
Билет 13 — Вопрос 11
Сколько транспортных средств Вам можно обогнать одновременно после проезда пешеходного перехода?
1. Только одно.
Только одно.
2. Только два.
3. Все три.
Правильный ответ:
Запрещено.
Билет 13 — Вопрос 13
Вы намерены проехать перекресток в прямом направлении. Ваши действия?
1. Проедете перекресток первым.
2. Уступите дорогу трамваю.
Включенный указатель поворота трамвая информирует о том, что пути движения Вашего автомобиля и трамвая пересекаются на перекрестке. Учитывая, что зеленый сигнал светофора разрешает движение прямо, а специальный светофор в виде буквы «Т» запрещает трамваю поворот направо, Вы можете проехать перекресток первым (пп. 6.2 и 6.8).
Правильный ответ:
Проедете перекресток первым.
Билет 13 — Вопрос 14
Кто из водителей, выполняющих поворот, должен уступить дорогу пешеходам?
1. Только водитель легкового автомобиля.
2. Только водитель грузового автомобиля.
Оба водителя при повороте на перекрестке должны уступить дорогу пешеходам (п. 13.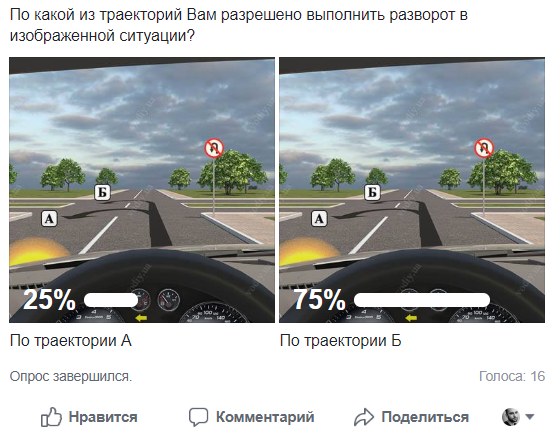 1). При отсутствии пешеходного перехода Правила предписывают пешеходам переходить проезжую часть по линии тротуаров или обочин (п. 4.3).
1). При отсутствии пешеходного перехода Правила предписывают пешеходам переходить проезжую часть по линии тротуаров или обочин (п. 4.3).
Правильный ответ:
Оба.
Билет 13 — Вопрос 15
Можете ли Вы в данной ситуации приступить к повороту налево?
1. Можете.
2. Можете, только убедившись в том, что не создадите помех встречному автомобилю, выполняющему поворот налево.
3. Не можете.
Находясь на второстепенной дороге, Вы должны уступить дорогу грузовому автомобилю. Однако, Вы можете приступить к повороту налево вместе с ним, если убедитесь в том, что траектории движения автомобилей не пересекаются, а в процессе поворота Вы не создадите ему помехи в движении (пп. 13.9 и 1.2, термин «Уступить дорогу»).
Правильный ответ:
Можете, только убедившись в том, что не создадите помех встречному автомобилю, выполняющему поворот налево.
Билет 13 — Вопрос 16
Разрешается ли Вам на легковом автомобиле перестроиться вправо, чтобы продолжить движение в прямом направлении?
1. Разрешается, если не создадите помех движению маршрутных транспортных средств.
Разрешается, если не создадите помех движению маршрутных транспортных средств.
2. Разрешается, если Вы управляете легковым такси.
На полосе, обозначенной знаком 5.14 «Полоса для маршрутных транспортных средств» (и разметкой
Билеты ПДД 2018—2019 онлайн
1 вопрос. Соответствуют ли действия водителя Правилам, если он движется посередине дороги?
Правильный ответ: 3. Не соответствуют.
Разъяснение: В нашей стране на всех дорогах установлено правостороннее движение (). Исходя из этого правила, водитель должен двигаться по правой стороне проезжей части дороги. Действия водителя не соответствуют Правилам.
2 вопрос. Как следует поступить, если Вам необходимо развернуться?
Правильный ответ: 2. Проехать прямо и развернуться за перекрестком.
Разъяснение: действует на то пересечение, перед которым он установлен, т.е. на перекресток, у которого всего одно пересечение проезжих частей. За этим перекрестком нет никаких ограничений для разворота, поэтому, нужно проехать прямо, и . Вовсе не обязательно ехать до следующего перекрестка.
Вовсе не обязательно ехать до следующего перекрестка.
3 вопрос. Разрешена ли Вам стоянка в указанном месте?
Правильный ответ: 3. Запрещена.
Разъяснение: Поставив автомобиль на стоянку в указанном месте, вы нарушите требование , который запрещает стоянку. Зона действия знака 3.27 распространяется до ближайшего перекрестка, а разрыв в разделительной полосе, обозначенный , перекрестком не является ().
4 вопрос. Эта табличка распространяет действие установленного с ней знака:
Правильный ответ: 2. На легковые автомобили, а также на грузовые автомобили с разрешенной максимальной массой не более 3,5 т.
Разъяснение: «Вид транспортного средства» указывает, что установленный с ним дорожный знак распространяет свое действие на легковые автомобили, а также грузовые автомобили с разрешенной максимальной массой до 3,5 т.
5 вопрос. Какой пешеходный переход обозначает данная разметка?
Правильный ответ: 3.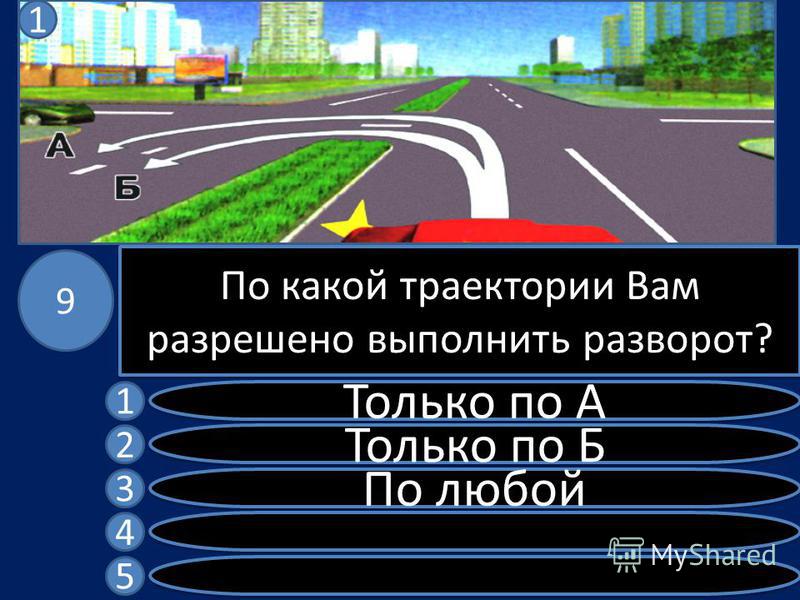 Любой.
Любой.
Разъяснение: может использоваться для обозначения любых пешеходных переходов. Желтый цвет применяют для улучшения заметности.
6 вопрос. Ваши действия в данной ситуации?
Правильный ответ: 1. Проедете переезд, убедившись в отсутствии приближающегося поезда.
Разъяснение: Круглый бело-лунный мигающий сигнал светофора на железнодорожном переезде разрешает движение (). Препятствия для движения нет. Таким образом, Вы можете проехать переезд, убедившись в отсутствии приближающегося поезда.
7 вопрос. Когда может быть прекращена подача сигнала рукой о повороте?
Правильный ответ: 1. Непосредственно перед началом маневра.
Разъяснение: Подача предупредительного сигнала рукой о повороте может быть прекращена непосредственно перед началом маневра (). Так разрешено для того, чтобы у водителя была возможность использовать обе руки для управления.
8 вопрос. Из какой полосы разрешено въехать на данный перекресток?
Правильный ответ: 3. Из любой.
Из любой.
Разъяснение: Впереди . На это указывает . На такой перекресток разрешается въехать с любой полосы ().
9 вопрос. Разрешается ли Вам выполнить разворот на этом участке дороги?
Правильный ответ: 2. Разрешается только при видимости дороги не менее 100 м.
Разъяснение: На данном участке нет условий, запрещающих разворот. Но впереди по движению поворот дороги, а разворот в таком месте разрешается, если видимость дороги более 100 метров ().
10 вопрос. С какой максимальной скоростью Вы имеете право продолжить движение на легковом автомобиле?
Правильный ответ: 3. 90 км/ч.
Разъяснение: На данном участке дороги требования ПДД, устанавливающие порядок движения в населенных пунктах, не действуют. Об этом информирует «Начало населенного пункта» на синем фоне. Согласно разрешается продолжить движение со скоростью не более 90 км/ч.
следующие 10 вопросов на 2-й стр ↓
Страницы: 1
1. Развернуться на этом перекрестке при отсутствии на нем других транспортных средств.
2. Проехать прямо и развернуться только на следующем перекрестке.
3. Проехать прямо и развернуться за перекрестком
Ответ 3. Проехать прямо и развернуться за перекрестком.
Комментарий: Знак 4.1.1 «Движение прямо» действует на первое пересечение и запрещает разворот, вы должны проехать перекресток в прямом направление, а потом развернуться.
БИЛЕТ №15 ВОПРОС №2
В каких направлениях Вам разрешено продолжить движение на перекрестке?
1. Только Б.
2. А или Б.
3. Б или В.
Ответ: 2. А или Б.
Комментарий: Знак 4.1.1 «Движение прямо» действует только на первое пересечение проезжих частей, перед которым он установлен. Вам запрещен только поворот направо на первую проезжую часть. В остальных направления Вы можете продолжить движение.
ВОПРОС №16 ВОПРОС №2
В какой из дворов Вы можете въехать в данной ситуации?
1. Только во двор налево.
Только во двор налево.
2. Только во двор направо
3. В любой.
4. Повороты во дворы запрещены.
Ответ: 2. Только во двор направо.
Комментарий: Знак 4.1.1 «Движение прямо», установленный за перекрестком, запрещает повороты налево во дворы и развороты на этом участке, но не ограничивая заезды во дворы, расположенные справа.
БИЛЕТ №17 ВОПРОС №9
По какой траектории Вам разрешено выполнить разворот?
1. Только на перекрестке — по траектории А.
2. Только перед перекрестком — по траектории Б.
3. По любой из предложенных траекторий.
4. Ни по одной из предложенных траекторий.
Ответ: 1. Только на перекрестке — по траектории А.
Комментарий: Знак 4.1.1 «Движение прямо» установлен в начале данного участка дороги, и его действие прекращается на следующем за ним перекрестке. Значит, выполнить разворот можно лишь по траектории А. Развернуться по траектории Б нельзя, так как в этом месте еще действует предписание знака.
Значит, выполнить разворот можно лишь по траектории А. Развернуться по траектории Б нельзя, так как в этом месте еще действует предписание знака.
БИЛЕТ №19 ВОПРОС №2
В каких направлениях Вам разрешено продолжить движение на легковом автомобиле?
1. Только прямо.
2. Только налево или направо.
3. В любых
Ответ: 3. В любых.
Комментарий: Табличка 8.4.1 «Вид транспортного средства» с изображением грузового автомобиля распространяет действие предписывающего знака 4.1.1 «Движение прямо» только на грузовые автомобили с разрешенной максимальной массой более 3,5 т. Таким образом, вы можете проехать перекресток в любом направлении.
БИЛЕТ №20 ВОПРОС №2
Разрешено ли Вам за перекрестком въехать во двор?
2. Нет.
3. Да, только если Вы проживаете в этом доме
В тесте: 20 вопросов
Вопрос 1 Показать правильный ответ
На каком рисунке изображен перекресток?
1) Только на левом
2) Только на правом
3) На обоих
Вопрос 2 Показать правильный ответ
По какой траектории Вы можете выполнить разворот?
1) Только по А
2) Только по Б
3) По любой
Вопрос 3 Показать правильный ответ
Разрешено ли Вам поставить автомобиль на стоянку в указанном месте по нечетным числам месяца?
1) Разрешено
2) Разрешено только после 19 часов
3) Запрещено
Вопрос 4 Показать правильный ответ
Какими знаками обозначают участки, на которых водитель обязан уступать дорогу пешеходам, находящимся на проезжей части?
1) Только А и Б
2) Только Б и В
3) Всеми
Вопрос 5 Показать правильный ответ
Что означает надпись на проезжей части дороги?
1) Расстояние до ближайшего перекрестка
2) Расстояние до ближайшего населенного пункта
3) Номер дороги или маршрута
Вопрос 6 Показать правильный ответ
В каких направлениях Вы можете продолжить движение?
1) Прямо или направо
2) Только прямо
3) Только направо
Вопрос 7 Показать правильный ответ
Как Вы должны действовать, если намереваетесь повернуть налево или выполнить разворот на двухполосной дороге?
1) Включить левые указатели поворота, затем приступить к маневру
2) Убедиться, что Вас не обгоняют, затем включить левые указатели поворота и приступить к маневру
Вопрос 8 Показать правильный ответ
Вы собираетесь начать движение от тротуара. Должны ли Вы уступить дорогу автомобилю, выполняющему разворот?
Должны ли Вы уступить дорогу автомобилю, выполняющему разворот?
Вопрос 9 Показать правильный ответ
Разрешено ли водителю легкового автомобиля подъехать задним ходом к пассажиру, стоящему на тротуаре в тоннеле?
1) Да
2) Да, если не будут созданы помехи другим участникам движения
3) Нет
Вопрос 10 Показать правильный ответ
По какой полосе Вам разрешено движение на легковом автомобиле в данной ситуации?
1) По любой
2) Только по правой
3) По любой, кроме крайней левой
Вопрос 11 Показать правильный ответ
Запрещен ли обгон в тоннелях?
1) Не запрещен
2) Запрещен
Вопрос 12 Показать правильный ответ
Нарушил ли водитель легкового автомобиля Правила, поставив автомобиль на стоянку указанным способом?
1) Нет
2) Нет, если при этом не создаются помехи для движения других транспортных средств
3) Да
Вопрос 13 Показать правильный ответ
Вы намерены повернуть налево. Следует ли уступить дорогу грузовому автомобилю?
Следует ли уступить дорогу грузовому автомобилю?
Вопрос 14 Показать правильный ответ
При желтом мигающем сигнале светофора, двигаясь прямо, Вы должны:
1) Остановиться и продолжить движение только после включения зеленого сигнала светофора
2) Уступить дорогу гужевой повозке
3) Проехать перекресток одновременно со встречным автомобилем
Вопрос 15 Показать правильный ответ
Вы намерены повернуть налево. Кому следует уступить дорогу?
1) Только автобусу
2) Легковому автомобилю и автобусу
3) Только мотоциклу
4) Никому
Вопрос 16 Показать правильный ответ
В каком случае водитель транспортного средства, приближающегося к нерегулируемому пешеходному переходу, обязан уступить дорогу пешеходу?
1) В обоих перечисленных случаях
2) Если пешеход переходит проезжую часть
3) Если пешеход вступил на проезжую часть
Вопрос 17 Показать правильный ответ
Обязаны ли Вы переключить дальний свет на ближний, если водитель встречного транспортного средства периодическим переключением света фар покажет необходимость этого?
1) Обязаны, только если расстояние до встречного транспортного средства менее 150 м
2) Обязаны, даже если расстояние до встречного транспортного средства более 150 м
3) Не обязаны
Вопрос 18 Показать правильный ответ
Принято считать, что среднее время реакции водителя составляет:
1) Примерно 0,5 секунды
2) Примерно 1 секунду
3) Примерно 2 секунды
Вопрос 19 Показать правильный ответ
На каком рисунке показано правильное положение рук на рулевом колесе?
1) На левом
2) На среднем
3) На правом
Вопрос 20 Показать правильный ответ
При совершении административного правонарушения, влекущего задержание транспортного средства, оно задерживается до:
1) Составления протокола об административном правонарушении
2) Устранения причины задержания
3) Рассмотрения дела об административном правонарушении
Пдд билет 30 вопрос 2
Елена Юрьевна (г. Москва)
Руслан (г.Москва), поправлю Вас: не «до первого пересечения проезжих частей», а на первом пересечении. То есть, до разделительной полосы.
Москва)
Руслан (г.Москва), поправлю Вас: не «до первого пересечения проезжих частей», а на первом пересечении. То есть, до разделительной полосы.
Елена (г.Воронеж) Спасибо
Руслан (г.Москва)
Елена(г. Воронеж) данный знак действует только до первого пересечения ПЧ,на втором пересечении это правило не действует.а значить вы имеете полное право развернуться по траектории Б и спокойно ехать в обратном направлении
Воронеж) данный знак действует только до первого пересечения ПЧ,на втором пересечении это правило не действует.а значить вы имеете полное право развернуться по траектории Б и спокойно ехать в обратном направлении
Елена (г.Воронеж) вот именно, а мы, развернувшись по Б , поедем через зону первого пересечения в направлении обратном стрелке?!
Виктор (г.Оренбург)
Елена (г.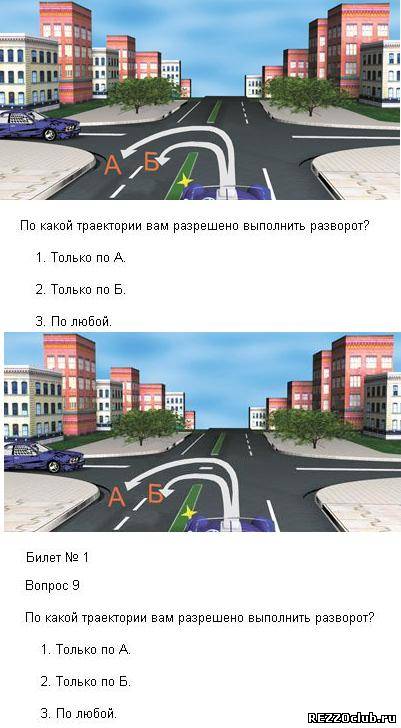 Воронеж), Данный знак действует только на то пересечение ПЧ, перед которым он установлен
Воронеж), Данный знак действует только на то пересечение ПЧ, перед которым он установлен
Елена (г.Воронеж) Но ведь знак «Движение прямо» разрешает движение только в направлении, указанном стрелкой, то есть только прямо. Как же можно по траектории А развернувшись по траектории Б проехать обратно через 1-й разворот в направлении , обратном стрелке?
Alexey (г.Moscow)
Евгений (г. С***), простите, а где Вы здесь прочитали про «Движение задним ходом»? Билет четко обозначает предполагаемый маневр — «Разворот». Этот маневр подразумевает смену движения на противоположное, так же ка ки двжиение задним ходом, только движение осуществляется постоянно носом машины вперед.
С***), простите, а где Вы здесь прочитали про «Движение задним ходом»? Билет четко обозначает предполагаемый маневр — «Разворот». Этот маневр подразумевает смену движения на противоположное, так же ка ки двжиение задним ходом, только движение осуществляется постоянно носом машины вперед.
Евгений (г.С***) SaToL (г.Москва), назад ехать нельзя, потому что 8.12: «… Движение задним ходом запрещается на перекрестках…». А вот на дорогах с односторонним движением ездить задним ходом как раз-таки можно.
SaToL (г. Москва)
Почему вы считаете что назад ехать нельзя? это же не знак односторонная дорога, а лишь указатель, что бы не хто с дуру не повернул налево в первый проезд где встречка. Кирпич дополнительно указывает, что бы туда не кто не поехал. А назад и налево во второй проезд, всегда пожалуйста.
Москва)
Почему вы считаете что назад ехать нельзя? это же не знак односторонная дорога, а лишь указатель, что бы не хто с дуру не повернул налево в первый проезд где встречка. Кирпич дополнительно указывает, что бы туда не кто не поехал. А назад и налево во второй проезд, всегда пожалуйста.
yamir (г.Мурманск)
Oksana (г.Moscow) ,потому что там стоит знак «Движение прямо», а не «Дорога с односторонним движением». И развернуться по Б(по 2-му ППЧ), поехать обратно можно..
И развернуться по Б(по 2-му ППЧ), поехать обратно можно..
Григорий (г.Междуреченск) Oksana (г.Moscow), ещё посмотрите билет 10-8. Если и после этого не поймёте свою ошибку, то можете сказать, как наш горный мастер участка:»Ты не умничай, а лучше пальцем покажи!» (шутка) Но, будет лучше, если Вы разберётесь самостоятельно.
Григорий (г.Междуреченск)
Oksana (г. Moscow), а если внимательно посмотреть на знак, почитать ПДД и подумать…?
Moscow), а если внимательно посмотреть на знак, почитать ПДД и подумать…?
Oksana (г.Moscow) Не понимаю зачем кому то нужно разворачиваться в данном месте. Обратно ехать нельзя, под кирпич тоже, зачем разворачиваться?
Прогнозирование траектории движения транспортного средства в реальном времени для обнаружения дорожных конфликтов на несигнализованных перекрестках
Прогнозирование траектории транспортного средства на несигнализованных перекрестках в реальном времени важно для обнаружения дорожных конфликтов и раннего предупреждения в реальном времени для повышения безопасности движения на несигнализированных перекрестках. В этом исследовании мы предлагаем надежный метод прогнозирования в реальном времени поворотных движений и траекторий транспортных средств с использованием глубоких нейронных сетей. Во-первых, разработана система извлечения траектории транспортного средства на основе технического зрения для сбора траекторий транспортных средств и их меток левого поворота, прямого и правого поворота для обучения моделей распознавания поворотов и многослойных глубоких нейронных сетей LSTM для задачи прогнозирования.Затем, при выполнении прогнозирования траектории транспортного средства, мы предлагаем метод тенденции изменения угла курса транспортного средства для распознавания будущего движения целевого транспортного средства, чтобы повернуть налево, пойти прямо и повернуть направо на основе характеристик данных траектории целевого транспортного средства перед прохождением остановки. линия. Наконец, мы используем обученные многослойные модели LSTM поворота налево, движения прямо и поворота направо, чтобы предсказать траекторию движения целевого транспортного средства через перекресток.
В этом исследовании мы предлагаем надежный метод прогнозирования в реальном времени поворотных движений и траекторий транспортных средств с использованием глубоких нейронных сетей. Во-первых, разработана система извлечения траектории транспортного средства на основе технического зрения для сбора траекторий транспортных средств и их меток левого поворота, прямого и правого поворота для обучения моделей распознавания поворотов и многослойных глубоких нейронных сетей LSTM для задачи прогнозирования.Затем, при выполнении прогнозирования траектории транспортного средства, мы предлагаем метод тенденции изменения угла курса транспортного средства для распознавания будущего движения целевого транспортного средства, чтобы повернуть налево, пойти прямо и повернуть направо на основе характеристик данных траектории целевого транспортного средства перед прохождением остановки. линия. Наконец, мы используем обученные многослойные модели LSTM поворота налево, движения прямо и поворота направо, чтобы предсказать траекторию движения целевого транспортного средства через перекресток. На основе платформы TensorFlow-GPU мы используем Yolov5-DeepSort для автоматического извлечения данных о траектории транспортного средства на несигнальных перекрестках.Результаты экспериментов показывают, что предложенный метод работает хорошо и имеет хорошие характеристики как по скорости, так и по оценке точности.
На основе платформы TensorFlow-GPU мы используем Yolov5-DeepSort для автоматического извлечения данных о траектории транспортного средства на несигнальных перекрестках.Результаты экспериментов показывают, что предложенный метод работает хорошо и имеет хорошие характеристики как по скорости, так и по оценке точности.
1. Введение
На несигнальных перекрестках интенсивность движения невелика и нет контроля светофора. Конфликты между транспортными потоками на несигнальных перекрестках невозможно эффективно разделить во времени и пространстве, что приводит к проблемам безопасности движения, которые нельзя игнорировать. Заранее оценивая точки конфликта между транспортными средствами и побуждая водителя принять меры для предотвращения рисков, можно эффективно повысить уровень безопасности несигнальных перекрестков.Прогнозирование траектории движения транспортного средства — важная часть предупреждения конфликтов. На основе прогнозируемого времени прибытия траектории до столкновения (TTC), времени после столкновения (PET), времени перерыва (GT) и других параметров положение конфликтной точки, которое превышает порог безопасности, может быть извлечено для определения риска конфликта.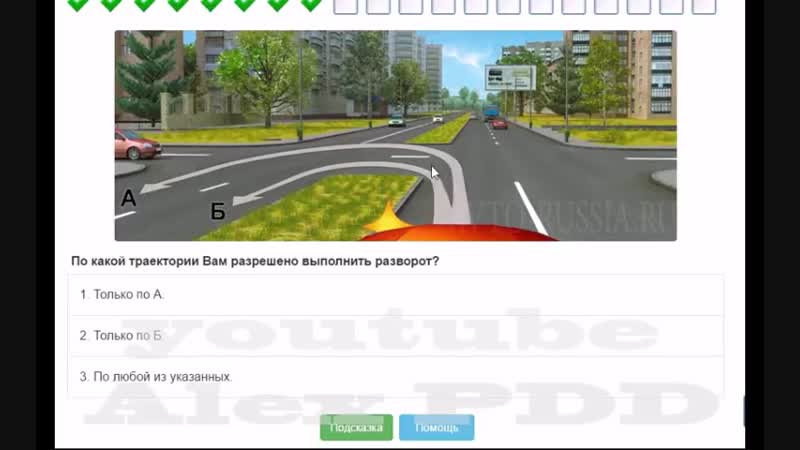 точка, а затем может быть выполнено предупреждение о конфликте.
точка, а затем может быть выполнено предупреждение о конфликте.
В настоящее время соответствующие ученые в основном работают над методами прогнозирования траекторий движения транспортных средств в сценариях автономного вождения.Основные методы прогнозирования траектории движения транспортного средства в условиях автономного вождения подразделяются на методы, основанные на физических моделях, и методы, основанные на данных траектории. Методы, основанные на физических моделях, принимают движение за отправную точку и строят динамические или кинематические модели на основе экспертных знаний [1–3]. В [1] определены максимальная кривизна траектории и планировщик пути обхода препятствий, основанный на параметрической кубической кривой Безье. Pool et al. разработала модель смеси движений с помощью вероятностных фильтров для прогнозирования маршрута велосипедиста и использовала местную топологию дороги для получения лучшего прогнозируемого распределения [2].Xie et al. использовали кривизну линии полосы движения в качестве ограничения для прогнозирования траектории движения транспортного средства в следующие несколько секунд с помощью построенных кубических кривых Безье, комбинируя информацию о состоянии транспортного средства и применяя модель постоянной скорости поворота и ускорения (модель CTRA) для формирования весовой функции для фильтрации наиболее предсказуемой траектории [3].
Методы, основанные на данных о траектории, используют глубокое или не глубокое обучение для анализа больших объемов исторических данных и прогнозирования траектории.Алгоритмы неглубокого обучения включают неявные марковские модели, регрессионные модели, фильтры Калмана и гауссовские процессы. Доказано, что расширенный фильтр Калмана (EKF) [4] и метод Монте-Карло имеют хорошую точность при краткосрочном прогнозировании траектории. Например, Кавасаки и Тасаки предложили метод прогнозирования траектории движения транспортного средства на перекрестке [5]. Учитываются скорость и геометрия перекрестка, и предполагается, что скорость транспортного средства минимизируется перед пересечением пешеходного перехода. Наконец, модель идеальной скорости сочетается с расширенным фильтром Калмана для прогнозирования будущего положения транспортного средства в несколько этапов.
Быстрое развитие глубокого обучения в последние годы принесло новые идеи в предсказание траектории. Рекуррентные нейронные сети (RNN), долговременная краткосрочная память (LSTM) и стробированные повторяющиеся блоки (GRU) успешно применяются при анализе данных временных рядов. Что касается выбора модели глубокого обучения, многие ученые предложили уникальные алгоритмы глубокого обучения, основанные на сценариях приложений. Некоторые ученые используют RNN для прогнозирования данных о траектории движения транспортного средства [6]. Однако структура RNN не может запомнить долгосрочное информационное состояние, и градиент исчезает или градиент взрывается во время обратного обучения, в результате чего сеть теряет способность к обучению.LSTM может лучше избежать этих проблем, поэтому он более популярен. Например, Chen et al. предложила модель прогнозирования траектории движения транспортного средства на основе кодера-декодера LSTM [7]. Модель использует три уровня различных LSTM для сбора информации о пространственных, временных и траекторных данных. Информация объединяется во весь вектор контекста, и, наконец, траектория предсказывается декодером. Алахи и др. предложила структуру «social-LSTM» [8], которая позволяет соседним в пространстве LSTM совместно использовать скрытое состояние друг друга, тем самым фиксируя зависимости между несколькими связанными последовательностями.
Что касается выбора модели глубокого обучения, многие ученые предложили уникальные алгоритмы глубокого обучения, основанные на сценариях приложений. Некоторые ученые используют RNN для прогнозирования данных о траектории движения транспортного средства [6]. Однако структура RNN не может запомнить долгосрочное информационное состояние, и градиент исчезает или градиент взрывается во время обратного обучения, в результате чего сеть теряет способность к обучению.LSTM может лучше избежать этих проблем, поэтому он более популярен. Например, Chen et al. предложила модель прогнозирования траектории движения транспортного средства на основе кодера-декодера LSTM [7]. Модель использует три уровня различных LSTM для сбора информации о пространственных, временных и траекторных данных. Информация объединяется во весь вектор контекста, и, наконец, траектория предсказывается декодером. Алахи и др. предложила структуру «social-LSTM» [8], которая позволяет соседним в пространстве LSTM совместно использовать скрытое состояние друг друга, тем самым фиксируя зависимости между несколькими связанными последовательностями.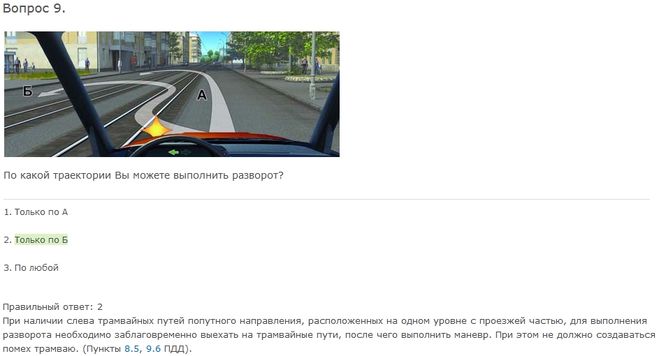 Ji et al. предложила модель прогнозирования траектории движения транспортного средства на основе LSTM [9]. Модель сначала использует функцию softmax для определения намерения вождения, а затем использует LSTM для прогнозирования траектории транспортного средства. Луо и др. предложила целевую модель прогнозирования траектории внимания [10]. Его модуль кодирования траектории использует два стандартных LSTM: один используется для кодирования исторической позиции, а другой — для кодирования исторической скорости. Две извлеченные функции связаны для прогнозирования характеристики движения транспортного средства.Помимо LSTM, некоторые ученые также проводят исследования двухэтапной сети прогнозирования траектории (TPNet) [11]. На первом этапе они извлекают основные характеристики из данных траектории. Чтобы сузить диапазон поиска, они предсказывают приблизительную конечную точку, и эта предсказанная конечная точка используется для создания рекомендуемой траектории. На втором этапе они просматривают рекомендованные траектории на основе исторических траекторий и подвижных территорий, сформированных высокоточными картами.
Ji et al. предложила модель прогнозирования траектории движения транспортного средства на основе LSTM [9]. Модель сначала использует функцию softmax для определения намерения вождения, а затем использует LSTM для прогнозирования траектории транспортного средства. Луо и др. предложила целевую модель прогнозирования траектории внимания [10]. Его модуль кодирования траектории использует два стандартных LSTM: один используется для кодирования исторической позиции, а другой — для кодирования исторической скорости. Две извлеченные функции связаны для прогнозирования характеристики движения транспортного средства.Помимо LSTM, некоторые ученые также проводят исследования двухэтапной сети прогнозирования траектории (TPNet) [11]. На первом этапе они извлекают основные характеристики из данных траектории. Чтобы сузить диапазон поиска, они предсказывают приблизительную конечную точку, и эта предсказанная конечная точка используется для создания рекомендуемой траектории. На втором этапе они просматривают рекомендованные траектории на основе исторических траекторий и подвижных территорий, сформированных высокоточными картами. Они находят наиболее вероятную будущую траекторию из рекомендованных траекторий, а затем уточняют их, чтобы гарантировать разнообразие окончательного прогноза.Более того, Yao et al. предложил метод двунаправленного мультимодального прогнозирования траектории (BiTrap), основанный на оценке цели [12]. Эта модель показала хорошие результаты в прогнозировании траекторий пешеходов по сценариям от первого лица (FPV) и с высоты птичьего полета (BEV).
Они находят наиболее вероятную будущую траекторию из рекомендованных траекторий, а затем уточняют их, чтобы гарантировать разнообразие окончательного прогноза.Более того, Yao et al. предложил метод двунаправленного мультимодального прогнозирования траектории (BiTrap), основанный на оценке цели [12]. Эта модель показала хорошие результаты в прогнозировании траекторий пешеходов по сценариям от первого лица (FPV) и с высоты птичьего полета (BEV).
Что касается сбора данных глубокого обучения, существует множество способов сбора данных о трафике, например видео и детектор петель. Feng et al. [13] предложил алгоритм межкадрового сопоставления цели при ограничениях динамики транспортного средства и уверенности в траектории с использованием Yolov5.Chen et al. [14] предложили метод автоматического и точного извлечения траекторий транспортного средства из аэрофотоснимка. Этот метод использует вейвлет-преобразование для удаления шума из координатных данных Френе и устранения отклонения положения траектории транспортного средства.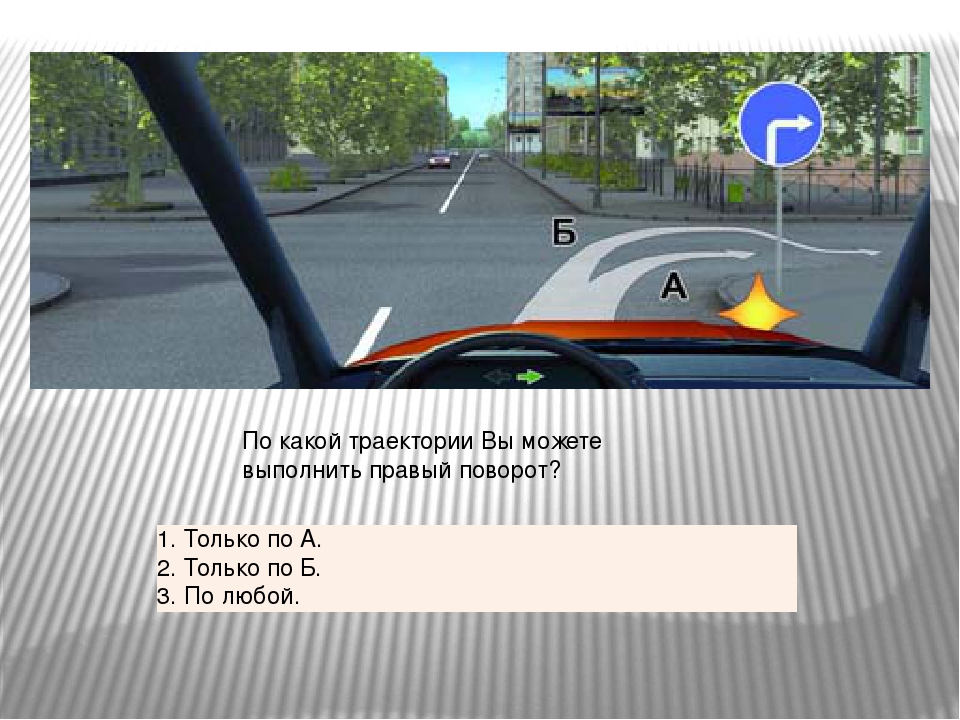 Кроме того, некоторые ученые используют OpenCV 2.3 [15] для сбора траекторий движения при повороте для обучения сетей DNN и LSTM для раннего предсказания траектории в следующие 2 секунды. Что касается обработки данных глубокого обучения, исходные данные о потоке трафика могут быть загрязнены шумом во время процесса сбора данных.Таким образом, данные о шуме значительно повлияют на производительность прогнозирования транспортного потока. В этом случае некоторые ученые используют обработку шумоподавления для исходных данных транспортного потока, чтобы получить лучшие результаты прогнозирования. Jiang et al. [16] предложил фильтр Савицки – Голея для фильтрации шума набора данных NGSIM (I-80). Они использовали три глубокие нейронные сети, долгую кратковременную память (LSTM), закрытый рекуррентный блок (GRU) и составной автокодер (SAE), чтобы предсказать положение и скорость приближающегося транспортного средства.Кроме того, для удаления шума данных потока трафика также применялись разложение по эмпирическим модам (EMD), разложение по ансамблям по эмпирическим модам (EEMD) и вейвлет (WL).
Кроме того, некоторые ученые используют OpenCV 2.3 [15] для сбора траекторий движения при повороте для обучения сетей DNN и LSTM для раннего предсказания траектории в следующие 2 секунды. Что касается обработки данных глубокого обучения, исходные данные о потоке трафика могут быть загрязнены шумом во время процесса сбора данных.Таким образом, данные о шуме значительно повлияют на производительность прогнозирования транспортного потока. В этом случае некоторые ученые используют обработку шумоподавления для исходных данных транспортного потока, чтобы получить лучшие результаты прогнозирования. Jiang et al. [16] предложил фильтр Савицки – Голея для фильтрации шума набора данных NGSIM (I-80). Они использовали три глубокие нейронные сети, долгую кратковременную память (LSTM), закрытый рекуррентный блок (GRU) и составной автокодер (SAE), чтобы предсказать положение и скорость приближающегося транспортного средства.Кроме того, для удаления шума данных потока трафика также применялись разложение по эмпирическим модам (EMD), разложение по ансамблям по эмпирическим модам (EEMD) и вейвлет (WL).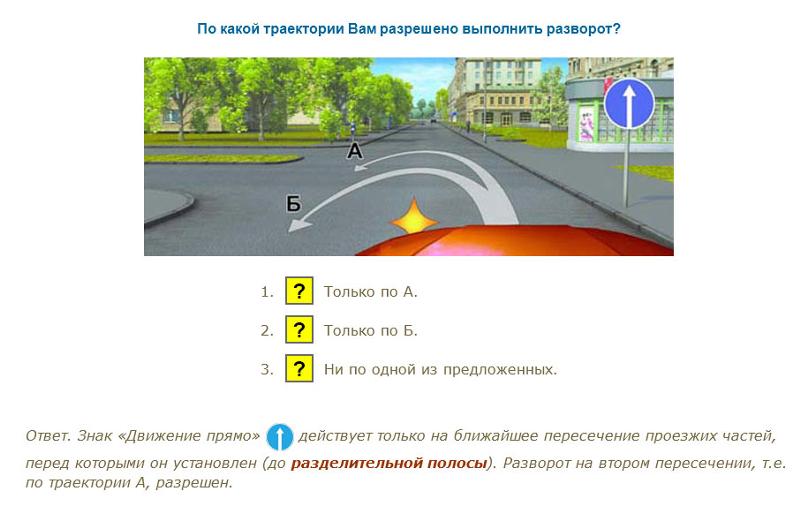 Согласно характеристикам различных наборов данных, некоторые ученые решают актуальные проблемы трафика с уникальной точки зрения согласно сценариям. Kim et al. [18] разделили дорожную среду, по которой движется транспортное средство, на сеточную карту занятости, выразили прогнозируемую траекторию транспортного средства как вероятность занятости на карте сетки занятости и использовали структуру сети LSTM для генерации будущей вероятности занятости транспортного средства на карта занятости.Mirus et al. [19] изучали влияние состава обучающего набора данных на основанную на нейронной сети модель прогнозирования траектории движения транспортного средства. Результаты исследования показывают, что обучающий эффект модели LSTM, сочетающей сценарии вождения с обучением по классификации, лучше, чем у модели LSTM, которая не различает сценарии.
Согласно характеристикам различных наборов данных, некоторые ученые решают актуальные проблемы трафика с уникальной точки зрения согласно сценариям. Kim et al. [18] разделили дорожную среду, по которой движется транспортное средство, на сеточную карту занятости, выразили прогнозируемую траекторию транспортного средства как вероятность занятости на карте сетки занятости и использовали структуру сети LSTM для генерации будущей вероятности занятости транспортного средства на карта занятости.Mirus et al. [19] изучали влияние состава обучающего набора данных на основанную на нейронной сети модель прогнозирования траектории движения транспортного средства. Результаты исследования показывают, что обучающий эффект модели LSTM, сочетающей сценарии вождения с обучением по классификации, лучше, чем у модели LSTM, которая не различает сценарии.
В настоящее время существует мало исследований, посвященных методам прогнозирования траектории транспортного средства в реальном времени в реальных сценариях ручного вождения. С точки зрения условий внутреннего и внешнего движения, технология автономного вождения не получила широкого распространения в большинстве областей. Бесспорно, что автономное вождение — это тенденция развития. Но на данный момент исследования по прогнозированию траектории транспортного средства в сценариях автономного вождения не могут быть применены к текущему обнаружению конфликтов транспортных средств на несигнальных перекрестках. Изучение прогнозирования траектории транспортного средства в сценариях ручного вождения и его применение в области предупреждения конфликтов может быстро применить результаты исследования на практике и значительно повысить уровень безопасности несигнальных перекрестков.
С точки зрения условий внутреннего и внешнего движения, технология автономного вождения не получила широкого распространения в большинстве областей. Бесспорно, что автономное вождение — это тенденция развития. Но на данный момент исследования по прогнозированию траектории транспортного средства в сценариях автономного вождения не могут быть применены к текущему обнаружению конфликтов транспортных средств на несигнальных перекрестках. Изучение прогнозирования траектории транспортного средства в сценариях ручного вождения и его применение в области предупреждения конфликтов может быстро применить результаты исследования на практике и значительно повысить уровень безопасности несигнальных перекрестков.
Возникшие проблемы заключаются в следующем: (1) существующие данные о траектории транспортного средства, основанные на БПЛА, GPS, моделировании вождения и других источниках, не могут реализовать обнаружение и прогнозирование траектории транспортного средства в реальном времени. На основе стационарной системы видеонаблюдения возможно обнаружение и прогнозирование траекторий транспортных средств в реальном времени, но в настоящее время нет соответствующего набора данных о траекториях транспортных средств. (2) Многоцелевые и долгосрочные методы прогнозирования траектории транспортного средства в реальном времени все еще исследуются, и существует множество проблем, связанных с повышением точности и скорости прогнозирования.
(2) Многоцелевые и долгосрочные методы прогнозирования траектории транспортного средства в реальном времени все еще исследуются, и существует множество проблем, связанных с повышением точности и скорости прогнозирования.
Основная цель нашего исследования — извлечь данные о траектории транспортного средства на въезде на несигнализируемый перекресток в реальном времени, а затем спрогнозировать поворот и траекторию транспортного средства для дальнейшего обнаружения конфликтов транспортных средств на перекрестке. Основные научные достижения этого исследования заключаются в следующем: (1) предлагается структура прогнозирования траектории транспортного средства в реальном времени для обнаружения дорожных конфликтов на несигнализированных перекрестках на основе видео наблюдения за дорогами. (2) Мы предлагаем метод распознавания намерения поворота транспортного средства, основанный на тенденции изменения угла курса транспортного средства на въезде на несигнализируемый перекресток, и метод прогнозирования траектории транспортного средства на основе многослойной модели LSTM. (3) Мы извлекаем тысячи данных о траектории транспортных средств из видеозаписей несигнализованных перекрестков и генерируем набор данных о траекториях транспортных средств с точки зрения мониторинга дорог.
(3) Мы извлекаем тысячи данных о траектории транспортных средств из видеозаписей несигнализованных перекрестков и генерируем набор данных о траекториях транспортных средств с точки зрения мониторинга дорог.
Наше исследование организовано следующим образом: Раздел 2 подробно описывает предлагаемый метод прогнозирования в реальном времени, Раздел 3 объясняет источник данных, экспериментальный процесс и результаты, а Раздел 4 кратко резюмирует результаты исследования.
2. Материалы и методы
Прогнозирование траектории движения транспортного средства на несигнализованных перекрестках — это задача прогнозирования траектории для нескольких целей.Основное внимание уделяется прогнозированию траектории каждого транспортного средства. Прогнозирование траектории одиночного транспортного средства можно разделить на два этапа. Сначала, в соответствии с характеристиками траектории обнаруженного транспортного средства на въезде на перекресток, оценивается, является ли намерение поворота транспортного средства, въезжающего на перекресток, прямым, левым или правым. Во-вторых, исторические данные о траектории транспортного средства используются для прогнозирования положения пути транспортного средства, проезжающего перекресток.
Во-вторых, исторические данные о траектории транспортного средства используются для прогнозирования положения пути транспортного средства, проезжающего перекресток.
На первом этапе точное определение намерения поворота транспортного средства может обеспечить важную гарантию точности и надежности прогноза траектории транспортного средства в реальном времени.В этой статье мы рассматриваем угол курса транспортного средства на въезде в полосу движения как признак поворота и используем тенденцию изменения угла курса транспортного средства, чтобы распознать намерение транспортного средства рулевого управления. На втором этапе прогнозирование положения траектории транспортного средства в реальном времени представляет собой прогнозирование временного ряда, поэтому мы рассматриваем возможность использования LSTM для построения модели прогнозирования положения траектории транспортного средства. Обзор нашего метода показан на рисунке 1.
Данные о траектории транспортного средства представляют собой данные временного ряда. Сначала мы извлекаем историческую траекторию проезда транспортных средств через перекресток из видео наблюдения. Траектории можно разделить на три типа: левый поворот, прямой и правый поворот. Используя эти три набора данных траектории для обучения LSTM, мы можем получить модели LSTM левого поворота, прямолинейного LSTM и LSTM правого поворота. Затем, в соответствии с обнаруженной в реальном времени траекторией целевого транспортного средства на въезде на перекресток, функция тенденции изменения угла курса транспортного средства используется для определения намерения транспортного средства поворачивать.Затем в соответствии с идентифицированной меткой поворота целевого транспортного средства обученная модель LSTM, соответствующая метке поворота, используется для дальнейшего прогнозирования траектории.
Сначала мы извлекаем историческую траекторию проезда транспортных средств через перекресток из видео наблюдения. Траектории можно разделить на три типа: левый поворот, прямой и правый поворот. Используя эти три набора данных траектории для обучения LSTM, мы можем получить модели LSTM левого поворота, прямолинейного LSTM и LSTM правого поворота. Затем, в соответствии с обнаруженной в реальном времени траекторией целевого транспортного средства на въезде на перекресток, функция тенденции изменения угла курса транспортного средства используется для определения намерения транспортного средства поворачивать.Затем в соответствии с идентифицированной меткой поворота целевого транспортного средства обученная модель LSTM, соответствующая метке поворота, используется для дальнейшего прогнозирования траектории.
2.1. Обучение модели
Модель, которую мы используем, представляет собой многослойную модель LSTM (см. Рисунок 2), и ее скрытый слой содержит N, — 1 выпадающих слоев, N — 1 слой LSTM и один плотный слой. Исторические данные о траектории транспортного средства для одного и того же въезда на том же перекрестке, извлеченные с камеры видеонаблюдения, делятся на три типа: набор данных для поворота влево, набор данных для прямого движения и набор данных для поворота вправо.Путем обучения по отдельности можно получить модели LSTM левого поворота, прямолинейного LSTM и LSTM правого поворота для каждого входа на перекресток.
Исторические данные о траектории транспортного средства для одного и того же въезда на том же перекрестке, извлеченные с камеры видеонаблюдения, делятся на три типа: набор данных для поворота влево, набор данных для прямого движения и набор данных для поворота вправо.Путем обучения по отдельности можно получить модели LSTM левого поворота, прямолинейного LSTM и LSTM правого поворота для каждого входа на перекресток.
2.2. Прогнозирование намерения поворота
Во-первых, мы используем исторические данные о траектории транспортного средства на въезде на перекресток, чтобы вычислить угол курса при каждом смещении транспортного средства. Затем мы выбираем данные угла курса соответствующей длины для создания скользящей панели и выполняем одномерную линейную регрессию для данных на скользящей панели.Наконец, в соответствии с реальной ситуацией на перекрестке, условия классификации транспортного средства, поворачивающего налево, идущего прямо и поворачивающего направо, корректируются в соответствии с характеристиками данных, такими как наклон регрессии и тенденция изменения. Когда мы выполняем распознавание намерения поворота транспортного средства, мы извлекаем характеристику угла курса транспортного средства на основе видеоданных о траектории движения, обнаруженной на въезде в полосу движения в реальном времени, и комбинируем скорректированные условия классификации для точного и стабильного определения намерения поворота транспортного средства.Формула расчета угла курса [20] выглядит следующим образом: где — угол курса, а — координата транспортного средства « a » в момент времени t .
Когда мы выполняем распознавание намерения поворота транспортного средства, мы извлекаем характеристику угла курса транспортного средства на основе видеоданных о траектории движения, обнаруженной на въезде в полосу движения в реальном времени, и комбинируем скорректированные условия классификации для точного и стабильного определения намерения поворота транспортного средства.Формула расчета угла курса [20] выглядит следующим образом: где — угол курса, а — координата транспортного средства « a » в момент времени t .
2.3. Прогнозирование траектории
После получения метки поворота траектории целевого транспортного средства на основе обнаружения данных о траектории целевого транспортного средства в реальном времени на въезде на перекресток мы используем обученную многослойную модель LSTM, согласованную с меткой поворота цели. транспортное средство для прогнозирования траектории транспортного средства, проезжающего перекресток.Процесс прогнозирования показан на рисунке 3.
3. Результаты и обсуждение
На основе видео наблюдения за несигнализованным перекрестком мы используем Yolov5-DeepSort для извлечения траекторий транспортных средств и получения такой информации, как идентификатор каждого транспортного средства и координаты траектории через перекресток. Затем, после обработки видеоданных о траектории, траектория остановленного транспортного средства и ненормальная траектория транспортного средства удаляются, а данные о траектории автоматически маркируются с категорией поворота.Затем мы используем обработанные данные траектории для обучения и прогнозирования, чтобы продемонстрировать эффективность модели, предложенной в исследовании. Модель реализована на одном графическом процессоре TensorFlow.
3.1. Наборы данных
3.1.1. Сбор данных
Данные о траектории транспортного средства, выбранные в эксперименте, берутся из видеозаписей транспортного потока на несигнальных перекрестках, снятых камерами видеонаблюдения. Общая длина отснятого видео составляет около 4 часов, разрешение и частота кадров 25 кадров в секунду.Мы используем Yolov5-DeepSort для обнаружения и отслеживания транспортных средств на перекрестке. Yolov5 [21] обнаруживает и распознает автомобили в каждом кадре видео. DeepSort назначает уникальный идентификатор транспортного средства и отслеживает одно и то же транспортное средство в режиме реального времени, тем самым получая данные о траектории всех транспортных средств, проезжающих через перекресток. Результаты обнаружения и отслеживания транспортных средств показаны на рисунке 4, а выделенная часть траектории показана на рисунке 5.
Общая длина отснятого видео составляет около 4 часов, разрешение и частота кадров 25 кадров в секунду.Мы используем Yolov5-DeepSort для обнаружения и отслеживания транспортных средств на перекрестке. Yolov5 [21] обнаруживает и распознает автомобили в каждом кадре видео. DeepSort назначает уникальный идентификатор транспортного средства и отслеживает одно и то же транспортное средство в режиме реального времени, тем самым получая данные о траектории всех транспортных средств, проезжающих через перекресток. Результаты обнаружения и отслеживания транспортных средств показаны на рисунке 4, а выделенная часть траектории показана на рисунке 5.
3.1.2. Обработка данных
На данные о траектории, полученные с помощью видеообнаружения, влияют скорость, путь движения и размер кузова каждого транспортного средства.На них также влияют объективные факторы, такие как погода, угол обзора и пиксели во время видеосъемки. Следовательно, извлеченные данные о траектории требуют дальнейшей обработки. Мы очищаем данные, устраняем аномальные траектории и извлекаем полные и нормальные данные о траекториях транспортного средства для проверки модели. Примеры извлеченных данных о траектории показаны в таблице 1.
Мы очищаем данные, устраняем аномальные траектории и извлекаем полные и нормальные данные о траекториях транспортного средства для проверки модели. Примеры извлеченных данных о траектории показаны в таблице 1.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 68
683.1.3. Этикетка направления
Чтобы получить метку поворота для данных о траектории каждого транспортного средства на видео, мы рисуем область распознавания на каждом въезде и выезде из перекрестка на видео и получаем пиксельные координаты области распознавания. Правило входа в зону распознавания и выхода из него: каждый раз, когда мы получаем новую координату транспортного средства на въезде на перекресток, координата будет автоматически соответствовать соответствующему положению зоны распознавания, и тогда мы сможем судить через какую зону распознавания перекрестка проезжает транспортное средство в соответствии с координатами транспортного средства. Правила сопоставления для меток поворота следующие: когда целевой автомобиль появляется в области распознавания перекрестка M впервые, и через определенный период, если он появляется в области распознавания перекрестка N во второй раз, тогда мы будем думать, что транспортное средство въезжает на перекресток с въезда M и выезжает с выезда N , а формат метки поворота установлен на ( M , N ).После завершения распознавания поворота данные о траектории разделяются на набор данных для прямого поворота, набор данных для поворота влево и набор данных для поворота вправо в соответствии с меткой поворота.
Правило входа в зону распознавания и выхода из него: каждый раз, когда мы получаем новую координату транспортного средства на въезде на перекресток, координата будет автоматически соответствовать соответствующему положению зоны распознавания, и тогда мы сможем судить через какую зону распознавания перекрестка проезжает транспортное средство в соответствии с координатами транспортного средства. Правила сопоставления для меток поворота следующие: когда целевой автомобиль появляется в области распознавания перекрестка M впервые, и через определенный период, если он появляется в области распознавания перекрестка N во второй раз, тогда мы будем думать, что транспортное средство въезжает на перекресток с въезда M и выезжает с выезда N , а формат метки поворота установлен на ( M , N ).После завершения распознавания поворота данные о траектории разделяются на набор данных для прямого поворота, набор данных для поворота влево и набор данных для поворота вправо в соответствии с меткой поворота.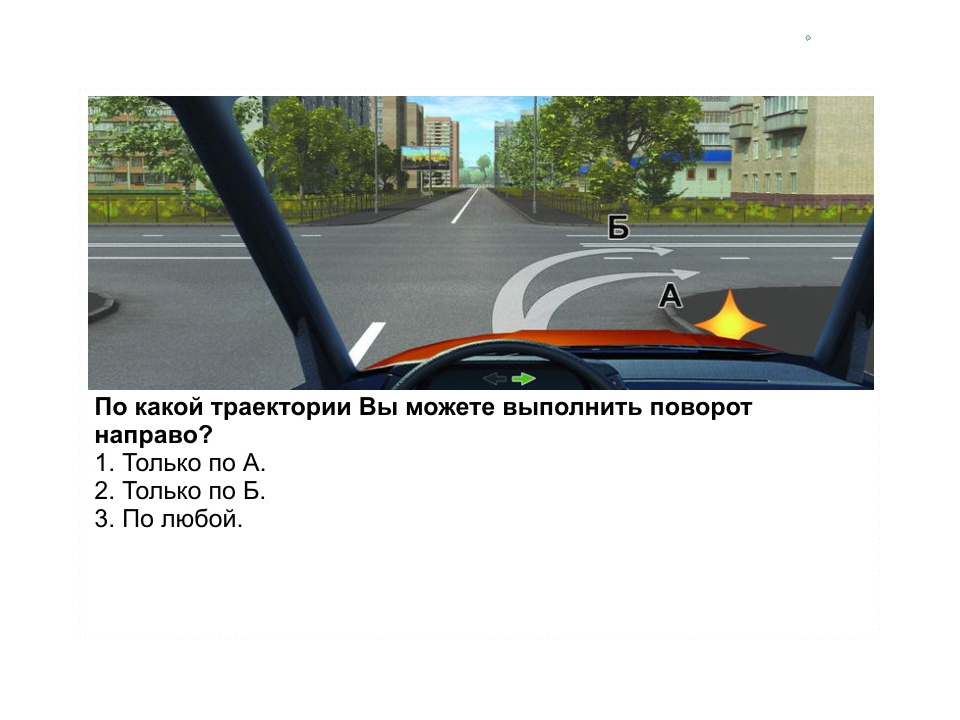 Область распознавания нарисована, как показано на Рисунке 6.
Область распознавания нарисована, как показано на Рисунке 6.
3.1.4. Экспериментальный набор данных
Для создания набора данных траектории нам необходимо унифицировать количество точек траектории для каждой траектории, чтобы данные траектории формировали матрицу с фиксированным размером и без нулевых значений и отвечали требованиям для транспортных средств, проходящих через перекресток. полностью.В соответствии с реальной ситуацией на перекрестке мы выбираем 4 секунды после того, как транспортное средство пересечет стоп-линию, в качестве диапазона прогнозирования координат траектории, то есть данных координат 100 точек траектории после того, как транспортное средство пересечет стоп-линию.
3.2. Обучение модели
Чтобы лучше проверить эффективность нашей модели, в эксперименте выбираются данные о траектории одного и того же входа на одном и том же перекрестке для проверки модели. На выбранных полосах движения имеется 1030 данных о траектории движения транспортных средств, в том числе 301 левый поворот, 406 прямолинейный и 323 правый поворот.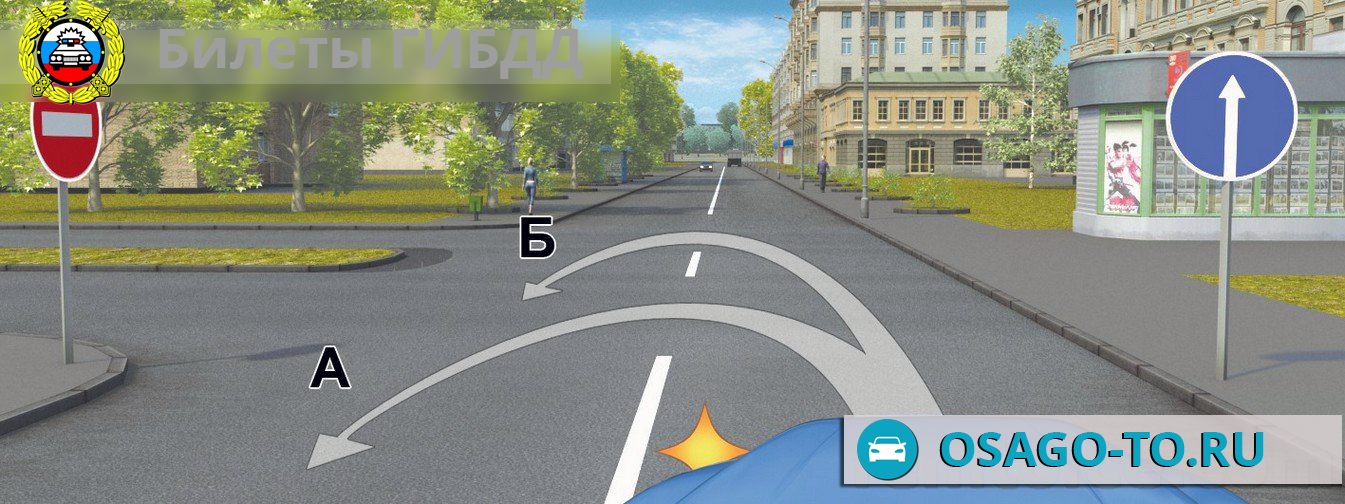 Сначала мы нормализуем данные о траектории, а затем используем безразмерные данные о траектории для обучения моделей LSTM с левым, прямым и правым поворотом на въезде. Мы используем 80% данных траектории в качестве обучающего набора и 20% в качестве набора для проверки.
Сначала мы нормализуем данные о траектории, а затем используем безразмерные данные о траектории для обучения моделей LSTM с левым, прямым и правым поворотом на въезде. Мы используем 80% данных траектории в качестве обучающего набора и 20% в качестве набора для проверки.
3.2.1. Обучение распознаванию поворотов
Мы настраиваем параметры алгоритма распознавания тенденции изменения угла курса транспортного средства в соответствии с характеристиками местности на несигнальном перекрестке. Регулируемыми параметрами алгоритма распознавания являются начальная позиция распознавания, длина области распознавания, размер скользящей панели и длина скользящего шага.
После нескольких раундов обучения мы выбираем 12 метров перед стоп-линией в качестве начальной позиции для распознавания и выбираем 50 точек с координатами траектории после начальной позиции для расчета угла курса. Скользящая панель — 20, шаг сдвига — 2. Правило оценки для распознавания поворота следующее: когда крутизна регрессии для угла курса, превышающего 2/3, попадает в интервал от –0,25 до 0,25, это означает намерение идти прямо; когда крутизна регрессии для угла курса, превышающего 2/3, находится между 0. 1 и 2, это намерение повернуть направо; и когда крутизна регрессии для угла курса, превышающего 6/10, находится в диапазоне от –2 до –0,2, предполагается поворот налево. На Рисунке 7 представлена диаграмма разброса наклона регрессии для каждого угла поворота рулевого колеса. Диаграмма разброса крутизны регрессии для каждого угла курса поворота показана на Рисунке 7.
1 и 2, это намерение повернуть направо; и когда крутизна регрессии для угла курса, превышающего 6/10, находится в диапазоне от –2 до –0,2, предполагается поворот налево. На Рисунке 7 представлена диаграмма разброса наклона регрессии для каждого угла поворота рулевого колеса. Диаграмма разброса крутизны регрессии для каждого угла курса поворота показана на Рисунке 7.
3.2.2. Обучение многослойной модели LSTM
После нормализации данных траектории транспортного средства в обучающем наборе и исключения размеров мы выбираем соответствующее количество слоев модели LSTM, длину скользящей панели и длину шага прогнозирования посредством обучения.
Сначала мы вводим данные траектории в модель LSTM разного количества слоев для экспериментов, а затем используем модель LSTM с оптимальным количеством слоев для тестирования скользящих панелей разной длины и размера шага прогнозирования. Оптимизатор, выбранный для каждой модели LSTM, — это Adam, метод вычисления ошибки — MSE (среднеквадратическая ошибка), а стандарт оценки точности — ACC.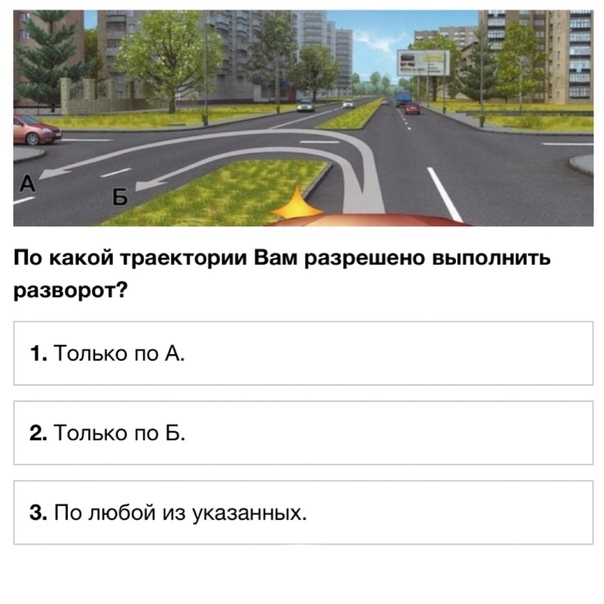
В процессе обучения модели мы обнаружили, что добавление слоя LSTM приведет к увеличению времени обучения со скоростью 0.От 3 до 0,8 раз. Когда мы выбираем слишком мало слоев LSTM, мы не можем изучить данные полностью, а когда мы выбираем слишком много слоев LSTM, время обучения будет слишком большим. Следовательно, если мы хотим достичь цели повышения точности обучения и сокращения времени обучения, мы должны выбрать соответствующее количество слоев для многослойного LSTM в соответствии с набором данных. Мы также обнаружили, что разная длина скользящей панели приводит к разным ошибкам обучения. Это связано с тем, что, когда скользящая панель слишком короткая, будет вводиться слишком мало известной информации о характеристиках траектории, а когда скользящая панель слишком длинная, будет введено слишком много информации о характеристиках траектории.Наконец, мы обнаруживаем, что увеличение длины прогнозируемой точки траектории немного влияет на время обучения, но вызывает увеличение ошибки обучения. Это связано с тем, что по мере увеличения длины прогнозируемой точки траектории информация об особенностях траектории, полученная многослойным LSTM из известной траектории, недостаточна для прогнозирования точки долгой будущей траектории. Согласно результатам экспериментов и с учетом влияния различных данных, наш выбор параметров показан в таблице 2.Изменения количества слоев LSTM и точности обучения показаны на рисунке 8, прогнозируемая длина координат и среднеквадратичная ошибка обучения показаны на рисунке 9, а прогнозируемая длина скользящей панели и среднеквадратичная ошибка обучения показаны на рисунке. 10.
Это связано с тем, что по мере увеличения длины прогнозируемой точки траектории информация об особенностях траектории, полученная многослойным LSTM из известной траектории, недостаточна для прогнозирования точки долгой будущей траектории. Согласно результатам экспериментов и с учетом влияния различных данных, наш выбор параметров показан в таблице 2.Изменения количества слоев LSTM и точности обучения показаны на рисунке 8, прогнозируемая длина координат и среднеквадратичная ошибка обучения показаны на рисунке 9, а прогнозируемая длина скользящей панели и среднеквадратичная ошибка обучения показаны на рисунке. 10.
| ||||||||||||||||||||||||||||
3 .
 3. Прогноз модели и обсуждение результатов
3. Прогноз модели и обсуждение результатов3.3.1. Распознавание поворота на основе тенденции изменения угла поворота автомобиля
Мы используем данные набора для проверки, чтобы протестировать алгоритм распознавания тенденции изменения угла поворота автомобиля и получить среднюю точность распознавания каждого намерения рулевого управления. Наконец, мы сравниваем алгоритм распознавания тенденции изменения угла курса транспортного средства с алгоритмом прогнозирования поворота KNN, и точность алгоритма распознавания тенденции изменения угла курса транспортного средства была значительно улучшена.Алгоритм распознавания тенденции изменения угла курса транспортного средства полностью использует географическую информацию о перекрестке и распознает намерение поворота в соответствии с характеристиками изменения угла курса каждого поворачивающего транспортного средства. Результат распознавания связан только с характеристиками перекрестка и изменяющейся тенденцией угла движения транспортного средства. Он не слишком полагается на историческую базу данных с богатыми выборками и обладает хорошей способностью к миграции. Поэтому по сравнению с алгоритмом KNN он имеет более высокую стабильность и практичность.Сравнение точности алгоритма изменения угла курса транспортного средства и алгоритма KNN показано в Таблице 3.
Он не слишком полагается на историческую базу данных с богатыми выборками и обладает хорошей способностью к миграции. Поэтому по сравнению с алгоритмом KNN он имеет более высокую стабильность и практичность.Сравнение точности алгоритма изменения угла курса транспортного средства и алгоритма KNN показано в Таблице 3.
| |||||||||||||||||||||||||||
3.3.2. Прогнозирование траектории транспортного средства на основе четырехуровневой модели LSTM
После того, как целевое транспортное средство получает прогнозируемую метку поворота, мы используем обученную соответствующую многослойную модель поворота LSTM для прогнозирования будущих данных о траектории целевого транспортного средства (100 точек траектории) на основе реальных -время обнаруженной цели траектории движения транспортного средства на полосе въезда (30 точек траектории). По сравнению с моделью транспортного средства с постоянной скоростью поворота и ускорением (CTRA), многослойная модель прогнозирования LSTM, предложенная в диссертации, имеет очевидные преимущества в точности прогнозирования и скорости. Сравнение точности прогноза и трудоемких данных показано в таблице 4.
По сравнению с моделью транспортного средства с постоянной скоростью поворота и ускорением (CTRA), многослойная модель прогнозирования LSTM, предложенная в диссертации, имеет очевидные преимущества в точности прогнозирования и скорости. Сравнение точности прогноза и трудоемких данных показано в таблице 4.
| ||||||||||||||||||||||||||||||||||||||||
3.
 3.3. Обсуждение результатов
3.3. Обсуждение результатовВ соответствии с поворотом целевого транспортного средства, прогнозируемым алгоритмом изменения угла курса транспортного средства, и данными о траектории целевого транспортного средства, обнаруженными в реальном времени на въезде, соответствующая модель поворота LSTM используется для прогнозирования будущей точки траектории. Результат прогноза движения по прямой показан на рисунках 11–14. Результат прогноза поворота налево показан на рисунках 15–18. Результат прогноза поворота направо показан на рисунках 19–22.
Согласно рисунку 11, точность обучения 97,22% прямолинейных моделей LSTM превышает 94%, а точность обучения 63,89% прямолинейных моделей LSTM превышает 97%. Эффект от тренировки хороший. Согласно Таблице 4 и Рисункам 12–14, в пиксельной системе координат абсолютная ошибка между прогнозируемой траекторией прямолинейной модели LSTM и фактической траекторией находится в пределах 100, а средняя абсолютная ошибка составляет 45.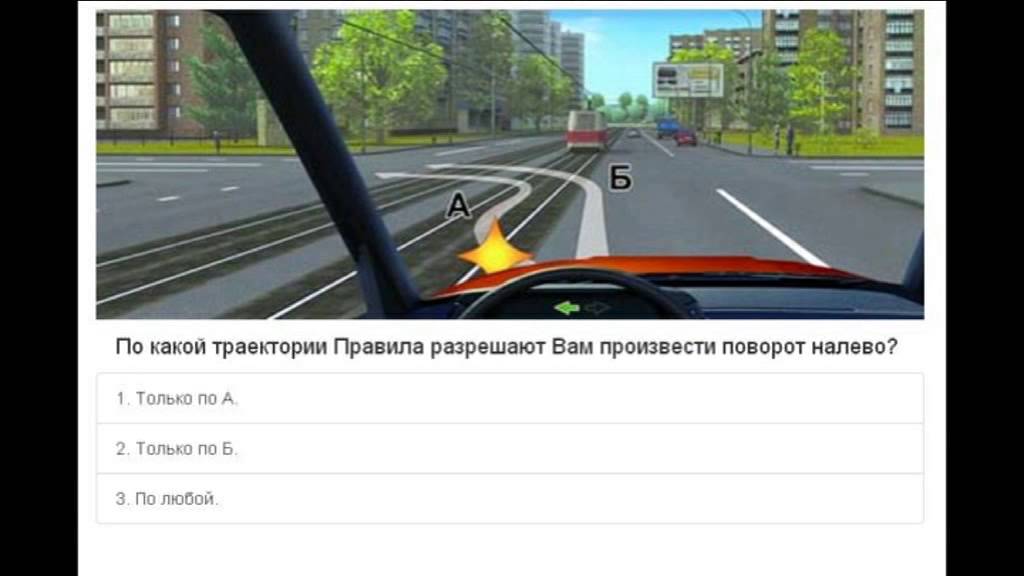 784. Отклонение между траекторией, предсказанной прямолинейной моделью LSTM, и фактической траекторией невелико. Прогнозирование занимает 1,87 секунды и выполняется в реальном времени. Точность обучения, абсолютная ошибка предсказания и время предсказания прямой модели LSTM находятся в допустимых пределах, а экспериментальные результаты хороши.
784. Отклонение между траекторией, предсказанной прямолинейной моделью LSTM, и фактической траекторией невелико. Прогнозирование занимает 1,87 секунды и выполняется в реальном времени. Точность обучения, абсолютная ошибка предсказания и время предсказания прямой модели LSTM находятся в допустимых пределах, а экспериментальные результаты хороши.
Согласно рисунку 15, точность обучения модели LSTM с левым поворотом превышает 97%, и эффект обучения хороший. Согласно Таблице 4 и Рисункам 16 и 17, в системе координат пикселей средняя абсолютная ошибка между прогнозируемой траекторией и фактической траекторией составляет 42.151. Среди них ошибка предсказания первых 50 шагов не превышает 40. Согласно Таблице 4 и Рисунку 18, 87,23% ошибок предсказания распределены в пределах 100. Эффект предсказания в первой половине лучше. Прогнозирование занимает 2,02 секунды, и скорость предсказания немного ниже. Анализируя траекторию, мы видим, что расстояние для поворота налево больше, а на перекрестке больше конфликтных точек. Причем радиус левого поворота больше, а направление траектории имеет определенную степень неопределенности.Процесс прогнозирования более сложен и требует большей вычислительной мощности.
Причем радиус левого поворота больше, а направление траектории имеет определенную степень неопределенности.Процесс прогнозирования более сложен и требует большей вычислительной мощности.
Рисунок 19 показывает, что точность обучения модели LSTM с правым поворотом более разбросана, чем у двух других моделей поворота. 60% моделей имеют точность обучения более 97%, а 90% моделей имеют точность обучения более 94%, что немного ниже, чем у двух других токарных моделей. Согласно рисункам 20–22, мы обнаруживаем некоторое отклонение между прогнозируемой траекторией поворота направо и фактической траекторией.В системе координат пикселей средняя абсолютная ошибка между прогнозируемой траекторией модели LSTM правого поворота и фактической траекторией составляет 73,21. 72,73% отклонений прогноза распределяются в пределах 100. Прогноз занимает 1,96 секунды, что лучше, чем у модели левого поворота. Анализируя траекторию, мы видим, что траектория поворота вправо имеет большую амплитуду поворота и небольшой радиус поворота. Несмотря на меньшее количество конфликтных точек, расстояние, которое автомобиль, поворачивающий направо, проходит в пределах перекрестка, меньше, и собирается меньше характеристических данных.
Несмотря на меньшее количество конфликтных точек, расстояние, которое автомобиль, поворачивающий направо, проходит в пределах перекрестка, меньше, и собирается меньше характеристических данных.
Таким образом, сравнивая модели прогнозирования траекторий левого, прямолинейного и правого поворота с точки зрения ошибки прогнозирования, затрат времени на прогноз и устойчивости модели прогнозирования, мы можем увидеть следующее: (1) С точки зрения ошибок прогнозирования средняя ошибка прогнозирования модели LSTM левого поворота является наименьшей, средняя ошибка прогнозирования прямой модели LSTM не сильно отличается от ошибки прогнозирования модели LSTM поворота влево, а средняя ошибка прогнозирования составляет модель LSTM с правым поворотом немного больше.(2) С точки зрения трудоемкого прогнозирования сложность прямолинейной траектории невысока, а длительное прогнозирование является самым коротким. Траектория поворота направо и поворота налево более сложная, время прогноза составляет около 2 с, а прогноз поворота налево немного длиннее. (3) С точки зрения устойчивости модели прогнозирования стандартное отклонение ошибки прогнозирования прямой модели LSTM составляет 21,233, стандартное отклонение ошибки прогнозирования левого поворота составляет 37.451, а стандартное отклонение ошибки прогноза правого поворота — 32,388. Результат предсказания прямолинейной траектории относительно стабилен, а результат предсказания траектории поворота влево немного хуже, чем у траектории поворота вправо.
(3) С точки зрения устойчивости модели прогнозирования стандартное отклонение ошибки прогнозирования прямой модели LSTM составляет 21,233, стандартное отклонение ошибки прогнозирования левого поворота составляет 37.451, а стандартное отклонение ошибки прогноза правого поворота — 32,388. Результат предсказания прямолинейной траектории относительно стабилен, а результат предсказания траектории поворота влево немного хуже, чем у траектории поворота вправо.
Эффект прогнозирования траектории транспортного средства в реальном времени для обнаружения транспортных конфликтов на несигнализованных перекрестках показан на рисунке 23.
4. Выводы
В этой статье используется метод прогнозирования траектории транспортного средства в реальном времени на основе угла курса транспортного средства. алгоритм распознавания тренда изменения и построена многослойная модель LSTM.Этот метод сначала извлекает данные о траектории транспортного средства на перекрестке с помощью видеодетектора, а затем обучает три многослойные модели LSTM для движения прямо, налево и направо в соответствии с категориями направлений. Затем мы используем алгоритм распознавания тенденции изменения угла направления транспортного средства, чтобы распознать намерение поворота целевого транспортного средства. Наконец, мы используем модель LSTM, соответствующую категории поворота, для прогнозирования положения траектории в реальном времени. Результаты экспериментов показывают, что по сравнению с другими алгоритмами алгоритм распознавания тенденции изменения угла курса транспортного средства имеет лучшую точность и стабильность прогноза.Четырехуровневая модель LSTM эффективна при прогнозировании траекторий транспортных средств на несигнальных перекрестках. По сравнению с моделью автомобиля с постоянной скоростью поворота и ускорением (CTRA), она имеет лучшие характеристики прогнозирования.
Затем мы используем алгоритм распознавания тенденции изменения угла направления транспортного средства, чтобы распознать намерение поворота целевого транспортного средства. Наконец, мы используем модель LSTM, соответствующую категории поворота, для прогнозирования положения траектории в реальном времени. Результаты экспериментов показывают, что по сравнению с другими алгоритмами алгоритм распознавания тенденции изменения угла курса транспортного средства имеет лучшую точность и стабильность прогноза.Четырехуровневая модель LSTM эффективна при прогнозировании траекторий транспортных средств на несигнальных перекрестках. По сравнению с моделью автомобиля с постоянной скоростью поворота и ускорением (CTRA), она имеет лучшие характеристики прогнозирования.
Наша дальнейшая работа — изучить улучшенный алгоритм LSTM или GRU и в то же время увеличить скорость прогнозирования для достижения дальнейшего улучшения производительности в реальном времени. Затем, путем дальнейшего изучения алгоритма распознавания конфликтов, будет реализовано предупреждение о конфликтах транспортных средств на несигнальных перекрестках в реальном времени.
Доступность данных
Данные, использованные для подтверждения выводов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации этой статьи.
Благодарности
Это исследование было поддержано Национальным фондом естественных наук Китая (грант № 51608054), Китайским фондом естественных наук провинции Хунань (грант №2018JJ3551) и Фонд научных исследований Департамента образования провинции Хунань (грант № 18B138). Авторы благодарят Чжэньюй Шаня, Цянь Сю, Чэнь Чжао и Хуэйхуэй Ли за их помощь во время исследования и подготовки рукописи.
Создание траектории IMM на основе модели для безопасного вождения в сценарии перекрестка
Отслеживание действий транспортных средств на перекрестках и планирование безопасных траекторий будет эффективным методом снижения количества дорожно-транспортных происшествий на перекрестках.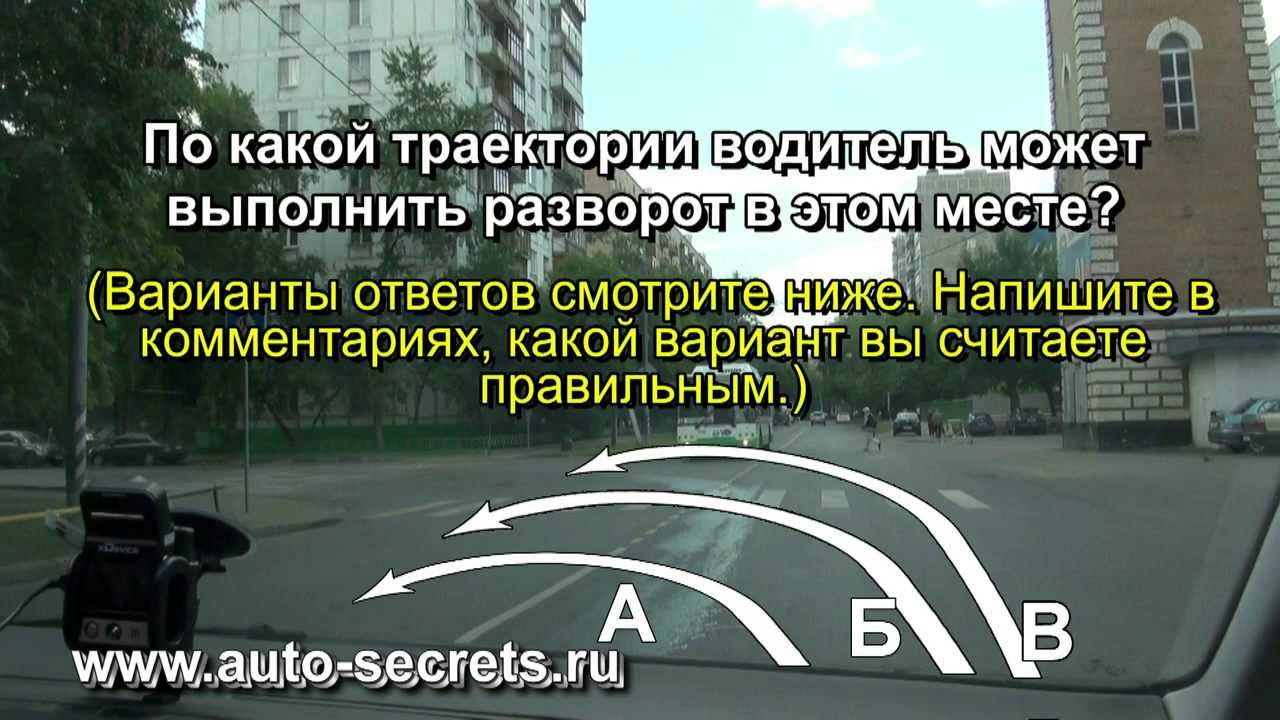 Это должно решить проблему резкой смены из-за наличия добровольного выбора водителей. В этой статье мы предлагаем усовершенствованный метод отслеживания IMM, основанный на генерации траектории, абстрагированной с помощью алгоритма генерации траектории, чтобы улучшить эту ситуацию. Из-за сходства между траекторией, управляемой человеком, и программной траекторией, которая генерируется алгоритмом, генерируемым траекторией, улучшенный метод IMM хорошо работает при отслеживании движущихся транспортных средств с некоторыми внезапными изменениями их движения.Набор данных собирается для экспериментов, когда транспортное средство-объект внезапно поворачивает налево в сценарии перекрестка. Для сравнения результатов экспериментов между методом IMM с моделью генерации траектории и без нее, ошибка отслеживания первого уменьшается на 75% в конкретном сценарии.
Это должно решить проблему резкой смены из-за наличия добровольного выбора водителей. В этой статье мы предлагаем усовершенствованный метод отслеживания IMM, основанный на генерации траектории, абстрагированной с помощью алгоритма генерации траектории, чтобы улучшить эту ситуацию. Из-за сходства между траекторией, управляемой человеком, и программной траекторией, которая генерируется алгоритмом, генерируемым траекторией, улучшенный метод IMM хорошо работает при отслеживании движущихся транспортных средств с некоторыми внезапными изменениями их движения.Набор данных собирается для экспериментов, когда транспортное средство-объект внезапно поворачивает налево в сценарии перекрестка. Для сравнения результатов экспериментов между методом IMM с моделью генерации траектории и без нее, ошибка отслеживания первого уменьшается на 75% в конкретном сценарии.
1. Постановка проблемы
В городских условиях использование частного автомобиля привело к серьезным проблемам с заторами, загрязнением и безопасностью. Пожалуй, самая серьезная проблема — это безопасность.Только в Китае в 2009 году произошло 238 000 несчастных случаев, что составило 275125 нефатальных травм и 67759 смертей [1], и многие из этих несчастных случаев произошли на перекрестках. Мы можем легко найти причины небезопасности на перекрестках из аварий и действий, которые произошло на перекрестке. Очевидно, это отличается от полосы движения, потому что у транспортных средств и пешеходов на перекрестках есть разные варианты выбора. В промышленно развитых странах были предприняты большие усилия по разработке новых типов транспортных систем для решения проблемы безопасности в сценариях перекрестков.Отслеживание действий транспортных средств на перекрестках и последующее планирование на их основе безопасного пути — эффективный подход к решению этой проблемы.
Пожалуй, самая серьезная проблема — это безопасность.Только в Китае в 2009 году произошло 238 000 несчастных случаев, что составило 275125 нефатальных травм и 67759 смертей [1], и многие из этих несчастных случаев произошли на перекрестках. Мы можем легко найти причины небезопасности на перекрестках из аварий и действий, которые произошло на перекрестке. Очевидно, это отличается от полосы движения, потому что у транспортных средств и пешеходов на перекрестках есть разные варианты выбора. В промышленно развитых странах были предприняты большие усилия по разработке новых типов транспортных систем для решения проблемы безопасности в сценариях перекрестков.Отслеживание действий транспортных средств на перекрестках и последующее планирование на их основе безопасного пути — эффективный подход к решению этой проблемы.
Однако из-за произвольного поведения вождения существующие модели, используемые в алгоритме взаимодействия нескольких моделей (IMM), не могут точно и эффективно отслеживать объект транспортного средства, особенно когда происходит резкое изменение движения. Причина этого недостатка кроется в отсутствии предсказуемости существующих моделей, таких как равномерное движение, режим движения с постоянным ускорением и модель скоординированного разворота (подробности можно найти в [2, 3]).Используя эти обычные модели, можно только оценить состояние транспортного средства в следующий раз выборки на основе текущего состояния. Если большое изменение движения произойдет в следующий раз выборки, оценка, основанная на текущем состоянии, покажет большие ошибки.
Причина этого недостатка кроется в отсутствии предсказуемости существующих моделей, таких как равномерное движение, режим движения с постоянным ускорением и модель скоординированного разворота (подробности можно найти в [2, 3]).Используя эти обычные модели, можно только оценить состояние транспортного средства в следующий раз выборки на основе текущего состояния. Если большое изменение движения произойдет в следующий раз выборки, оценка, основанная на текущем состоянии, покажет большие ошибки.
Фактически, перед тем, как произойдет резкое изменение движения, рядом появятся некоторые знаки, такие как смена светофора и замедление скорости перед поворотами. Выявление этих знаков для облегчения работы алгоритма отслеживания — потенциальный метод решения указанной выше проблемы.Тогда гипотеза будет еще более изменена. Если на основе знаков и некоторых других ситуаций, которые мы можем воспринимать, может быть сгенерирована управляемая человеком траектория транспортного средства, а также новая модель может абстрагироваться от нее, мы можем использовать эту новую модель, чтобы заменить обычную. модели в методе IMM для получения возможности прогнозирования.
модели в методе IMM для получения возможности прогнозирования.
Учитывая вышеизложенное, мы предлагаем новую модель, которая абстрагируется от алгоритма генерации траектории, чтобы добавить в метод IMM для решения проблемы отслеживания резкого изменения движения.В этой статье мы рассмотрим сценарий перекрестка в городской среде в качестве примера для объяснения.
2. Уровень техники
В предшествующей работе были предложены два вида методов для решения этой проблемы, а именно: связь между транспортными средствами (V2V) и отслеживание транспортных средств. Преимущество метода V2V, который сочетается с системами восприятия, заключается в том, что положения и движения других транспортных средств доступны через систему V2V, а затем на их основе можно планировать траектории. Проекты сосредоточены на коммуникации V2V для безопасности дорожного движения в целом; мы можем найти, например, программу электронной безопасности [4], которая направлена на ускорение разработки, развертывания и использования систем, использующих информационные и коммуникационные технологии для повышения безопасности дорожного движения. Наконец, Коммуникационный консорциум V2V [5] решает аналогичные проблемы, уделяя особое внимание созданию стандарта для приложений активной безопасности. В [6] представлена другая тактика с V2V. В тактике, учитывающей скорость транспортных средств, нечеткая логика используется для принятия решения о том, пересекать перекресток или нет.
Наконец, Коммуникационный консорциум V2V [5] решает аналогичные проблемы, уделяя особое внимание созданию стандарта для приложений активной безопасности. В [6] представлена другая тактика с V2V. В тактике, учитывающей скорость транспортных средств, нечеткая логика используется для принятия решения о том, пересекать перекресток или нет.
Однако недостаток V2V тоже очевиден. Для реализации системы V2V все транспортные средства, участвующие в движении, должны быть оснащены оборудованием связи, которое стоит очень дорого.По этой причине хорошим выбором будет метод слежения за автомобилем. В настоящее время метод IMM является одним из наиболее эффективных методов, который используется как в гражданских, так и в военных целях.
В [7] предложен алгоритм VS-IMM-PF (переменная структура-IMM-фильтр частиц), который основан на процессе оценки состояния и коррекции шума процесса в соответствии с характеристиками наземной движущейся цели. Результаты моделирования показывают, что предложенный алгоритм может отслеживать движущуюся по земле цель с большей точностью и меньшей сложностью в расчетах, чем некоторые другие алгоритмы, основанные только на коррекции шума технологического процесса. Другой алгоритм, названный IMM-PF (IMM-фильтр частиц), обсуждается в [8], который поддерживает постоянное количество частиц для всех режимов в фильтре независимо от вероятностей апостериорных мод. В [9] представлен алгоритм DIMM (диагональная взаимодействующая множественная модель). Алгоритм DIMM повторно взвешивается с помощью диагональных матриц на основе правила объединения мультисенсорной оптимальной информации в смысле линейной минимальной дисперсии вместо правила Байеса. Одновременно алгоритм может избежать гибридного вычисления функции правдоподобия и вероятностной массы и различать эффекты, производимые различными измерениями состояния.
Другой алгоритм, названный IMM-PF (IMM-фильтр частиц), обсуждается в [8], который поддерживает постоянное количество частиц для всех режимов в фильтре независимо от вероятностей апостериорных мод. В [9] представлен алгоритм DIMM (диагональная взаимодействующая множественная модель). Алгоритм DIMM повторно взвешивается с помощью диагональных матриц на основе правила объединения мультисенсорной оптимальной информации в смысле линейной минимальной дисперсии вместо правила Байеса. Одновременно алгоритм может избежать гибридного вычисления функции правдоподобия и вероятностной массы и различать эффекты, производимые различными измерениями состояния.
С учетом предыдущих методов, мы представляем новый подход, который имеет следующие отличительные характеристики: (1) Модель генерации траектории имеет ту же форму, что и модель обычного скоординированного поворота, что значительно упрощает замену обычных и добавленных в метод IMM, без изменения процедуры расчета метода IMM. (2) Модель генерации траектории абстрагируется от алгоритма генерации траектории, поэтому, когда она будет добавлена в метод IMM, точность отслеживания будет значительно улучшена из-за характеристики способности прогнозирования, которую имеет алгоритм генерации траектории.
3. Теория алгоритма
Мы абстрагируем нашу модель генерации траектории от алгоритма генерации траектории, который использует полиномы кубической кривизны для генерации наборов траекторий. Форма модели скоординированного разворота зарезервирована в модели генерации траектории, и в заголовке указывается только параметр скорости разворота, который рассчитывается алгоритмом генерации траектории и рассматривается как очень приближенное к истинному значению. Мы также предложили эффективный метод расчета связанных параметров алгоритма построения траектории и тем временем решить проблему обхода препятствий.
3.1. Модель генерации траектории
Модель генерации траектории абстрагируется от метода генерации траектории, который будет использоваться в методе IMM для имитации произвольного поведения, в основном резкого поворота при пересечении перекрестков. Сначала будет представлен алгоритм генерации траектории, а затем мы построим на его основе модель генерации траектории.
Метод генерации траектории генерирует набор траектории между двумя точками, который должен быть выражен как где — состояние транспортного средства с положением, курсом и кривизной.Учитывая, что положения начальной и конечной точек описываются как четыре степени свободы в пространстве состояний, решение уравнений состояния для кривизны, которая является полиномом третьего порядка по длине дуги: Динамическое моделирование ядер фильтра Калмана, используемых в методе IMM, определяет ограничения динамического процесса. Применительно к формам модели скоординированного разворота вектор совместной системы модели генерации траектории может быть выражен в той же форме, что и где — положение во времени выборки, скорость по оси и оси соответственно и параметр скорости поворота.
Как известно, заголовок можно выразить как где — интервал выборки датчиков. Затем решая два приведенных выше уравнения одновременно для функции, связанной с параметрами скорости поворота и, Если, то. При этом условии модель генерации траектории превращается в модель согласованного разворота.
При этом условии модель генерации траектории превращается в модель согласованного разворота.
Следовательно, динамическая модель для генерации траектории где — одномерный белый гауссовский технологический шум для параметра скорости поворота.
В (6) заголовок обновляется значением наблюдения, в то время как и должно быть получено с помощью метода генерации траектории, который выражается как где .
Заголовки, полученные методом построения траектории, считаются очень приближенными к истинным значениям из-за наличия инициативы водителя. Очевидно, что вычисление по (5) также является лучшей оценкой скорости поворота, чем обычное оценочное значение в модели координированного разворота, которое выражается следующим образом:
Модель генерации траектории построена на основе параметра скорости поворота, поэтому повышенная точность оценки также повысит точность этой модели.
3.2. Планирование пути на перекрестке
В качестве ограничений светофора ситуации на перекрестке можно разделить на три случая: прямо, повернуть налево и повернуть направо. По сигналам светофора можно легко определить направление движения транспортного средства. Поскольку в статье в основном рассматривается ситуация внезапного поворота, мы можем взять ситуацию поворота налево в качестве иллюстрации. Установите въезд на левую дорогу как координату конца пути планирования, чтобы параметры метода планирования пути можно было вычислить с использованием следующего алгоритма.
По сигналам светофора можно легко определить направление движения транспортного средства. Поскольку в статье в основном рассматривается ситуация внезапного поворота, мы можем взять ситуацию поворота налево в качестве иллюстрации. Установите въезд на левую дорогу как координату конца пути планирования, чтобы параметры метода планирования пути можно было вычислить с использованием следующего алгоритма.
Решение уравнений в (2) и получение ответов кажутся одним из способов решения проблемы. К сожалению, последние два уравнения (2) получить нелегко.
Эффективный метод построения траектории был предложен Надь и Келли [10]. Длина дуги основана на приближении наблюдаемого среднего соотношения между начальным и конечным положениями и общим изменением курса на большом наборе образцов. И мы предполагаем, что параметр равен нулю, затем мы решаем уравнения и одновременно для и.Фактические уравнения следующие: Мы предложили метод циркуляции параметров (PCM) для расчета точных решений и одновременного решения задачи обхода препятствий.
В PCM мы определяем небольшие диапазоны вариаций для параметров,, и, которые вычисляются по (9), а затем строим четырехкратную циркуляцию по мере изменения параметров. Будет сгенерирован набор траекторий, выбрана и реализована оптимальная. Затем мы генерируем функцию стоимости, которая учитывает некоторую смесь риска, плавности, длины и других «затрат», которые могут быть связаны с траекторией, чтобы выбрать оптимальную, и функция стоимости выглядит следующим образом: Положение препятствия, воспринимаемое Velodyne, проецируется на сетку в несколько сантиметров на плоскости.Мы отслеживаем и прогнозируем движение транспортных средств с препятствиями методом IMM и вычисляем их положение, когда траектории проходят рядом, что помечается на сетке как реальные препятствия. Как только траектория пересекает ячейку сетки, которая занята реальными препятствиями, устанавливается как бесконечность. Также учитываются ошибки завершения: Алгоритм PCM указан в алгоритме 1.
| ||||||||||||||||||||||||||

3.3. Алгоритм взаимодействия с несколькими моделями
Основная идея алгоритма IMM заключается в использовании разных моделей движения для соответствия различным состояниям движения объекта.Это может устранить ошибку, вызванную несоответствием состояния движения цели модели при использовании одной модели движения. Цепь Маркова используется для обмена между различными моделями движения. Подробнее об этом можно прочитать в [11–13].
Алгоритм IMM состоит из трех основных частей.
(1) Интерактивный ввод
Элементы матрицы Маркова используются с вероятностью модели предыдущего цикла для вычисления прогнозируемой вероятности модели Смешивание оценок состояния и их ковариаций может быть выполнено:
(2) Специфическая для модели фильтрация
Прогнозируемые оценки состояния и их ковариации могут быть рассчитаны с использованием различных динамических моделей. Остаточная погрешность измерения есть и есть остаточная ковариация. Вероятность наблюдения рассчитывается из: Рассчитываются вероятности новой модели:
Остаточная погрешность измерения есть и есть остаточная ковариация. Вероятность наблюдения рассчитывается из: Рассчитываются вероятности новой модели:
(3) Интерактивный вывод
Наконец, общая оценка состояния и ее ковариация выглядят следующим образом: Блок-схема алгоритма IMM показана на рисунке 1.
4. Эксперименты
Мы проводим эксперименты с наборами данных, полученными нашим автономным транспортным средством — SmartV-II (показано на рисунке 2), оснащенным датчиком Velodyne HDL-64. на крыше.Он сканирует примерно с частотой 10 Гц, составляет 64 строки развертки с разным размером круга, дает поле обзора по горизонтали 360 ° и поле обзора по вертикали 26,8 ° и обеспечивает более 1,33 миллиона точек в секунду (Подробнее о Velodyne HDL- 64 можно найти в [14]). GPS (глобальная система позиционирования) и IMU (инерциальный измерительный прибор) также используются для получения точного местоположения и направления SmartV-II.
Представленные здесь тестовые данные были собраны SmartV-II в кампусе Уханьского университета. Мы выбираем сцену трехстороннего пересечения для сбора экспериментальных данных. За объектом следует SmartV-II, который на перекрестке резко поворачивает налево.
Мы выбираем сцену трехстороннего пересечения для сбора экспериментальных данных. За объектом следует SmartV-II, который на перекрестке резко поворачивает налево.
Во-первых, мы обрабатываем тестовые данные для обнаружения целевого транспортного средства, и в методе обнаружения выполняются несколько этапов: маркировка соединенных областей, грубое извлечение и точное извлечение. Использованные нами алгоритмы упоминаются в [15, 16]. Эффекты после каждого шага показаны на рисунке 3. А объект-транспортное средство показан в виде зеленого прямоугольника в самой правой части рисунка 3 (c).
Во-вторых, обрабатывая данные от Velodyne, мы можем получить координаты транспортного средства объекта в системе координат SmartV-II. Тогда глобальные координаты транспортного средства легко получить после некоторых преобразований, потому что глобальные положения SmartV-II известны.
В-третьих, для отслеживания транспортного средства объекта в эксперименте 1 (E1) выбраны две модели: стандартная скоростная модель винеровского процесса и модель генерации траектории. Эксперимент отбирает 40 пар данных, которые следуют сразу после крутого поворота.И две путевые точки алгоритма генерации траектории устанавливаются как (-423,5, 203, 90, 0) и (-405, 207, 60, 0), которые основаны на результатах после преобразования координат.
Эксперимент отбирает 40 пар данных, которые следуют сразу после крутого поворота.И две путевые точки алгоритма генерации траектории устанавливаются как (-423,5, 203, 90, 0) и (-405, 207, 60, 0), которые основаны на результатах после преобразования координат.
Стандартная модель скорости винеровского процесса может быть выражена следующим образом: где и,. Параметры ковариационной матрицы технологического шума задаются как В модели генерации траектории, которая выражается как (6), технологический шум скорости поворота задается как И мы также разрабатываем контрольный эксперимент (E2), который выбирает модель регулярного скоординированного разворота, описанную в (8), чтобы заменить модель генерации траектории, и параметр корреляции равен 0.05.
Сравнение между E1 и E2 показано на рисунке 4. Среднеквадратичные ошибки обоих экспериментов перечислены в таблице 1.
| ||||||||||||||||||
, траектория слежения за двумя фигурами 4 сходится быстрее в самом начале и после этого идеально совпадает с траекторией измерения. А средние MSE E1 снизились на 75% на основе E2. Это приводит к выводу, что модель построения траектории способствует точности отслеживания, поскольку она намного лучше соответствует поведению водителей, чем модель скоординированного поворота, особенно когда происходит резкое изменение.
Описанный выше эксперимент повторяется более 15 раз с разными данными, и результаты без исключения удовлетворительны.
5. Заключение и дальнейшая работа
В этой статье мы предложили проблему повышения точности отслеживания транспортных средств с резкими изменяющимися движениями, и для ее решения была построена новая модель.Основные идеи заключаются в следующем. Абстрагируя модель генерации траектории от алгоритма генерации траектории, который может имитировать поведение водителей, и используя ее в методе IMM, мы эффективно отслеживаем объектное транспортное средство в сценарии перекрестка с необычно повышенной точностью. Подход, который мы использовали для абстрактной модели, можно рассматривать как двухэтапную процедуру. Во-первых, отношения между моделью создания траектории и алгоритмом создания траектории устанавливаются посредством дифференциальной взаимосвязи между курсом и параметром скорости поворота.На втором этапе значение вычисляется алгоритмом генерации траектории для разрешения, который является основой новой модели.
Наш подход предполагает, что состояние конечной точки можно угадать из-за наличия знаков, за которыми следует резкое изменение движения. Фактически, исследования нашей работы по обнаружению этих признаков недостаточно из-за лежащих в основе трудностей. Это будет ключевым моментом нашей будущей работы.
Благодарности
Эта статья поддержана Национальным фондом естественных наук Китая в рамках гранта No.41050110437 и грант № 41001306, Национальная инновационная группа в рамках гранта № 40721001, Фонд докторских программ в рамках гранта № 20070486001, и Фонд независимых исследований Уханьского университета в рамках гранта № 3101019.
Объяснение источников траектории параллакса Destiny 2 и лучшего метода фарма • Eurogamer.
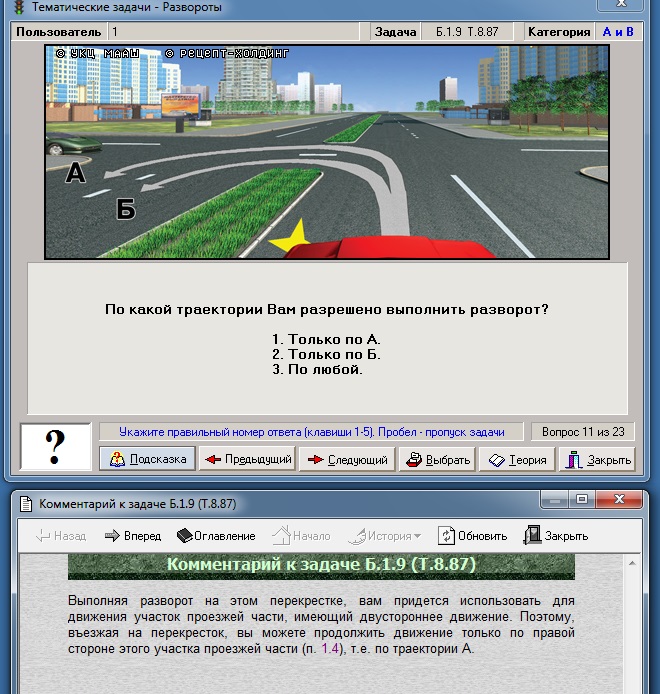 net
netТраектория параллакса Destiny 2 — это новая валюта, представленная в Season of the Lost.
Эта валюта используется в кодировке H.E.L.M. социальное пространство для улучшения компаса Wayfinder на станции калибровки компаса, фокусировки мрачных энграмм и открытия Troves Wayfinder в действии Astral Alignment.
Будучи такой важной и регулярной валютой, эта страница будет охватывать всех источников траектории параллакса за весь сезон, а также лучший метод фермы траектории параллакса на данный момент.
На этой странице:
Destiny 2 PS5 против Xbox Series X | S — истинное преимущество нового поколения
Как получить траекторию параллакса в Destiny 2
Новый сезон означает, что нужно собирать новые валюты, и «Траектория параллакса» будет постоянной в ваших путешествиях.
В отличие от эфира, который можно получить только победив врагов в многочисленных действиях, и довольно неуловимых расшифрованных данных, этот можно получить из самых разных источников.
На данный момент существует шесть различных методов получения траектории параллакса:
- Победа над противниками по всей Солнечной системе (3 случайные траектории параллакса, в зависимости от шанса выпадения)
- Завершение действий списка воспроизведения (~ 100 траекторий параллакса)
- Завершение публичных мероприятий (стандартные события дают 75 Parallax Trajectory, в то время как Heroic вместо этого дает 88 Parallax Trajectory)
- Завершение определенных сюжетных заданий Season of the Lost (~ 100 Parallax Trajectory)
- Захватывающие восходящие якоря (30 траекторий параллакса)
- Достижение определенных уровней в сезонном абонементе (~ 100-150 траектории параллакса)
Кроме того, можно увеличить предел фарма Parallax Trajectory благодаря компасу Wayfinder, который позволяет вам получать соответствующие улучшения, которые могут иметь значение в долгосрочной перспективе:
- Astral Harvester: Увеличивает траекторию параллакса из действий плейлиста (открывается на пятом уровне калибровки компаса Wayfinder)
- Parallax Focusing: дает шанс на дополнительную траекторию параллакса при сборе восходящих якорей (требуется способность True Sight)
- Восходящее зрение: в Расколотом царстве появляются дополнительные восходящие якоря (требуется способность Истинное зрение).

- Первопроходец: увеличивает сезонные валютные награды из еженедельных сундуков Расколотых королевств (требуется способность «Безопасный проход»).

Улучшения стоят сотни траекторий параллакса каждое, что может показаться нелогичным, но воспринимайте их как вложение, чтобы упростить получение валюты в будущем.
Источники Parallax Trajectory в Destiny 2 в деталях и лучший метод фарма
Подобно Path of the Splicer, новая цепочка квестов под названием Wayfinder’s Voyage — это то, за чем вы будете внимательно следить.
Всегда стоит проходить через это, так как есть шанс, что за шаги квеста вы будете вознаграждены как минимум 100 траекториями параллакса по ходу.
На данный момент, по крайней мере, в течение первой недели сезона в сезонных испытаниях не начисляется Parallax Trajectory. Мы не уверены, что это изменится, но это уже изменение темпа по сравнению с Season of the Splicer, где испытания могут вознаграждать расшифрованные данные.
В другом месте вы можете получить эту валюту, выполнив действия из списка воспроизведения, такие как Гамбит, Горнило и Забастовки. Вы получите около 100 траекторий параллакса после каждого из них.
Если вы хотите получить куски валюты как можно быстрее, лучший метод фермы Parallax Trajectory сводится к публичным мероприятиям . Стандартные предоставят вам 75 траекторий параллакса, в то время как героические события имеют в запасе 88 траекторий параллакса в качестве награды.
Учитывая их частоту и непродолжительность по сравнению с действиями в плейлисте, публичные мероприятия — безусловно лучшая ферма Parallax Trajectory.
Когда вы выполняете любое из вышеупомянутых действий, победа над врагами имеет случайное падение 3 траектории параллакса.
Это обычно происходит по крайней мере пару раз за миссию или действие, но не полагайтесь исключительно на этот метод, так как это займет абсурдное количество времени.
Как и в прошлых сезонах, есть более простой способ.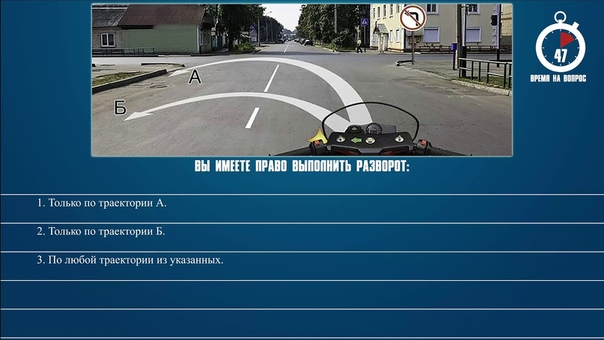 Достижение 2, 12, 32, 52, 72 и 92 рангов сезонного пропуска наградит вас шипами траектории параллакса, каждый из которых дает минимум 100 траекторий параллакса.
Достижение 2, 12, 32, 52, 72 и 92 рангов сезонного пропуска наградит вас шипами траектории параллакса, каждый из которых дает минимум 100 траекторий параллакса.
Наконец, не забудьте инвестировать в обновления для компаса Wayfinder, чтобы упростить получение траектории параллакса в действиях по плейлисту и за счет взаимодействия с Ascendant Anchors.
Независимо от метода, получение этой валюты повысит вашу репутацию у поставщика калибровки компаса, что является отличным способом получить мрачные энграммы.
Рассвет и Моменты триумфа возвращаются еще на год! В другом месте мы недавно отметили 30-ю годовщину Bungie, в которую добавлены подземелье «Хватка алчности», странные монеты, новые экзотические предметы, в том числе Гьяллархорн и Предтеча.В дорожной карте Season of the Lost появятся еще больше, но до тех пор мы видели Путешествие Путешественников, действие Астрального выравнивания и обнаружение Атласа Перекоса, Тривиальной тайны, Загадочной тайны, Тайны восхождения, Кеша данных, Траектории параллакса и Якоря восходящего движения.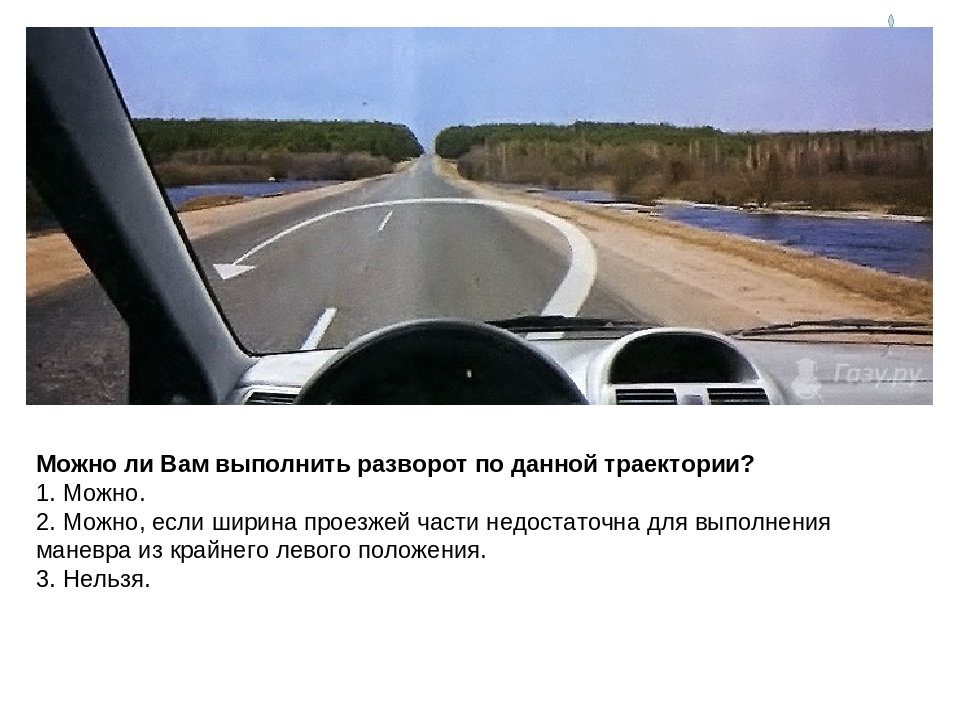 локации. В другом месте мы видели новое оружие Nightfall, такое как Uzume RR4, Plug One.1 и Hung Jury SR4. Другие недавние новые функции включают трансмогрификацию и материалы Synthstrand, Synthcord и Synthweave, Splicer Gauntlet и Decrypted Data, используемые для его обновления.
локации. В другом месте мы видели новое оружие Nightfall, такое как Uzume RR4, Plug One.1 и Hung Jury SR4. Другие недавние новые функции включают трансмогрификацию и материалы Synthstrand, Synthcord и Synthweave, Splicer Gauntlet и Decrypted Data, используемые для его обновления.
Объяснение ограничения траектории параллакса в Destiny 2
Как это часто бывает с новыми валютами в Destiny 2, вы не сможете просто запастись Parallax Trajectory, не достигнув предела.
Максимальный запас инвентаря Parallax Trajectory составляет 1500. Кроме того, Bungie заявила, что их можно получить в полном инвентаре, поэтому убедитесь, что у вас есть свободное место, чтобы не потерять их.
Обязательно помните об этом, прежде чем обналичивать Parallax Trajectory Spikes, так как они могут быть спасением, когда они вам больше всего нужны, если вы их держите.
% PDF-1.3
1 0 объект
>
эндобдж
2 0 obj
>
эндобдж
3 0 obj
>
/ ExtGState>
/ a0>
>>
/ Шрифт>
/ ProcSet [/ Text / ImageC / ImageB / PDF / ImageI]
/ ColorSpace>
>>
/ MediaBox [0 0 612 792]
/ Аннотации [41 0 R 42 0 R 43 0 R 44 0 R 45 0 R 46 0 R 47 0 R 48 0 R 49 0 R 50 0 R 51 0 R 52 0 R 53 0 R]
>>
эндобдж
4 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [62 0 R 63 0 R 64 0 R 65 0 R 66 0 R 67 0 R 68 0 R 69 0 R 70 0 R 71 0 R 72 0 R 73 0 R 74 0 R 75 0 R 76 0 R 77 0 R 78 0 R 79 0 R 80 0 R 81 0 R 82 0 R 83 0 R 84 0 R 85 0 R 86 0 R 87 0 R 88 0 R 89 0 R 90 0 R 91 0 R 92 0 R 93 0 R 94 0 R 95 0 R 96 0 R 97 0 R 98 0 R 99 0 R 100 0 R 101 0 R 102 0 R 103 0 R 104 0 R 105 0 R 106 0 R 107 0 R 108 0 R 109 0 R 110 0 R 111 0 R 112 0 R 113 0 R 114 0 R 115 0 R 116 0 R 117 0 R 118 0 R 119 0 R 120 0 R 121 0 R 122 0 R 123 0 R 124 0 R 125 0 R 126 0 R 127 0 128 0 R 129 0 R 130 0 R 131 0 R 132 0 R 133 0 R]
>>
эндобдж
5 0 объект
>
/ ExtGState>
/ Шрифт>
/ ProcSet [/ Text / ImageC / ImageB / PDF / ImageI]
>>
/ Группа 194 0 р
/ MediaBox [0 0 612 792]
/ Annots [195 0 196 0 ₽ 197 0 198 0 ₽ 199 0 200 0 ₽ 201 0 202 0 ₽ 203 0 204 0 ₽ 205 0 206 0 ₽ 207 0 208 0 ₽]
/ Тип / Страница
>>
эндобдж
6 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Annots [223 0 R 224 0 R 225 0 R 226 0 R 227 0 R 228 0 R 229 0 R 230 0 R 231 0 R 232 0 R 233 0 R 234 0 R]
>>
эндобдж
7 0 объект
>
/ ExtGState>
/ Шрифт>
/ ProcSet [/ Text / ImageC / ImageB / PDF / ImageI]
>>
/ MediaBox [0 0 612 792]
/ Annots [239 0 R 240 0 R 241 0 R 242 0 R 243 0 R 244 0 R]
>>
эндобдж
8 0 объект
>
/ ExtGState>
/ Шрифт>
/ ProcSet [/ Text / ImageC / ImageB / PDF / ImageI]
>>
/ Группа 194 0 р
/ MediaBox [0 0 612 792]
/ Annots [254 0 R 255 0 R 256 0 R 257 0 R 258 0 R 259 0 R 260 0 R 261 0 R 262 0 R 263 0 R 264 0 R 265 0 R 266 0 R 267 0 R]
/ Тип / Страница
>>
эндобдж
9 0 объект
>
/ ExtGState>
/ Шрифт>
/ ProcSet [/ Text / ImageC / ImageB / PDF / ImageI]
/ ColorSpace>
>>
/ MediaBox [0 0 612 792]
/ Annots [279 0 280 0 рандов 281 0 282 р.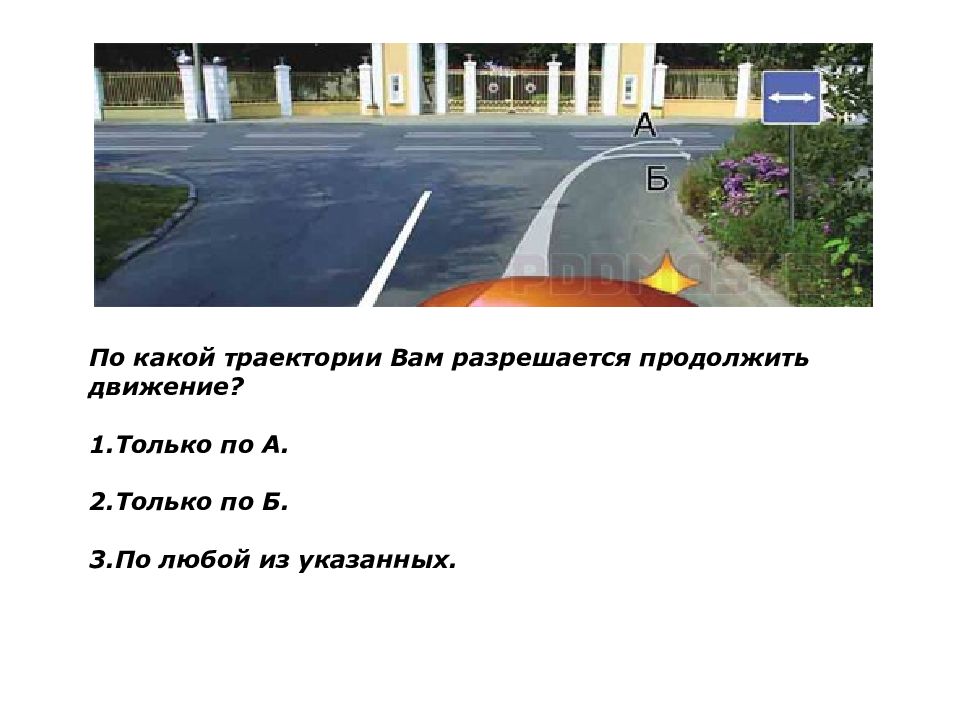 283 0 284 р. 285 0 р. 286 0 287 р. 288 0 289 р. 0 290 р. 291 0 р.]
>>
эндобдж
10 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [295 0 296 0 297 0 298 0 299 0 300 0 301 0 302 0 303 0 304 304 руб.]
>>
эндобдж
11 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [308 0 R 309 0 R 310 0 R 311 0 R 312 0 R 313 0 R 314 0 R 315 0 R 316 0 R 317 0 R 318 0 R 319 0 R 320 0 R 321 0 R 322 0 R 323 0 324 0 R 325 0 R 326 0 R 327 0 R 328 0 R 329 0 R 330 0 R 331 0 R 332 0 R 333 0 R 334 0 R 335 0 R 336 0 R 337 0 R 338 0 R 339 0 R 340 0 341 руб. 0 342 руб. 0 руб. 344 руб. 0 руб. 345 0 руб. 0 руб. 347 0 руб.
>>
эндобдж
12 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [353 0 R 354 0 R 355 0 R 356 0 R 357 0 R 358 0 R 359 0 R 360 0 R 361 0 R 362 0 R 363 0 R 364 0 R 365 0 R 366 0 R 367 0 R 368 0 369 0 R 370 0 R 371 0 R 372 0 R 373 0 R 374 0 R 375 0 R 376 0 R 377 0 R 378 0 R 379 0 R 380 0 R 381 0 R 382 0 R 383 0 R 384 0 R 385 0 386 0 R 387 0 R]
>>
эндобдж
13 0 объект
>
эндобдж
14 0 объект
>
ручей
q
q
q
0. 1 0 0 0,1 0 0 см
/ R7 гс
0 г
q
10 0 0 10 0 0 см
BT
/ R8 14,3462 Тс
1 0 0 1 91.6602 675.067 тм
[(Di) 10 (см. \ 055and \ 055Conquer) -249.995 (f) 24.9923 (или) -249.995 (Lane \ 055A) 89.9918 (war) 17.998 (e) -250 (Di) 10 (v) 9.99625 (erse) — 249.986 (T) 73.9916 (rajectory) -250.012 (Pr) 18.0048 (ediction)] TJ
/ R10 11.9552 Тс
-0,39727 -37,8582 тд
[(Шрирам) -250 (Нараянан)] TJ
/ R12 7.9701 Тс
87.307 4.33906 Td
[(1) -0.29866] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Рамин) -250.01 (Мусульман)] TJ
/ R12 7.9701 тс
77.3848 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Франческо) -249,991 (Питталуг) 4,99096 (а)] TJ
/ R12 7.9701 Тс
93.9066 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Buyu) -249.997 (Liu)] TJ
/ R12 7.9701 Тс
45.5008 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
-263,824 -18,2859 тд
[(Манмохан) -250,016 (Чандрак) 10,0126 (эр)] TJ
/ R12 7.9701 Тс
113.095 4.33789 Td
[(1) -0,30019] ТДж
/ R14 7.9701 Тс
4.23398 0 Тд
[(\ 073) -0.10109] ТДж
/ R12 7.
283 0 284 р. 285 0 р. 286 0 287 р. 288 0 289 р. 0 290 р. 291 0 р.]
>>
эндобдж
10 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [295 0 296 0 297 0 298 0 299 0 300 0 301 0 302 0 303 0 304 304 руб.]
>>
эндобдж
11 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [308 0 R 309 0 R 310 0 R 311 0 R 312 0 R 313 0 R 314 0 R 315 0 R 316 0 R 317 0 R 318 0 R 319 0 R 320 0 R 321 0 R 322 0 R 323 0 324 0 R 325 0 R 326 0 R 327 0 R 328 0 R 329 0 R 330 0 R 331 0 R 332 0 R 333 0 R 334 0 R 335 0 R 336 0 R 337 0 R 338 0 R 339 0 R 340 0 341 руб. 0 342 руб. 0 руб. 344 руб. 0 руб. 345 0 руб. 0 руб. 347 0 руб.
>>
эндобдж
12 0 объект
>
/ Шрифт>
/ ProcSet [/ ImageC / Text / PDF / ImageI / ImageB]
>>
/ MediaBox [0 0 612 792]
/ Аннотации [353 0 R 354 0 R 355 0 R 356 0 R 357 0 R 358 0 R 359 0 R 360 0 R 361 0 R 362 0 R 363 0 R 364 0 R 365 0 R 366 0 R 367 0 R 368 0 369 0 R 370 0 R 371 0 R 372 0 R 373 0 R 374 0 R 375 0 R 376 0 R 377 0 R 378 0 R 379 0 R 380 0 R 381 0 R 382 0 R 383 0 R 384 0 R 385 0 386 0 R 387 0 R]
>>
эндобдж
13 0 объект
>
эндобдж
14 0 объект
>
ручей
q
q
q
0. 1 0 0 0,1 0 0 см
/ R7 гс
0 г
q
10 0 0 10 0 0 см
BT
/ R8 14,3462 Тс
1 0 0 1 91.6602 675.067 тм
[(Di) 10 (см. \ 055and \ 055Conquer) -249.995 (f) 24.9923 (или) -249.995 (Lane \ 055A) 89.9918 (war) 17.998 (e) -250 (Di) 10 (v) 9.99625 (erse) — 249.986 (T) 73.9916 (rajectory) -250.012 (Pr) 18.0048 (ediction)] TJ
/ R10 11.9552 Тс
-0,39727 -37,8582 тд
[(Шрирам) -250 (Нараянан)] TJ
/ R12 7.9701 Тс
87.307 4.33906 Td
[(1) -0.29866] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Рамин) -250.01 (Мусульман)] TJ
/ R12 7.9701 тс
77.3848 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Франческо) -249,991 (Питталуг) 4,99096 (а)] TJ
/ R12 7.9701 Тс
93.9066 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
34,6223 -4,33906 тд
[(Buyu) -249.997 (Liu)] TJ
/ R12 7.9701 Тс
45.5008 4.33906 Td
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
-263,824 -18,2859 тд
[(Манмохан) -250,016 (Чандрак) 10,0126 (эр)] TJ
/ R12 7.9701 Тс
113.095 4.33789 Td
[(1) -0,30019] ТДж
/ R14 7.9701 Тс
4.23398 0 Тд
[(\ 073) -0.10109] ТДж
/ R12 7.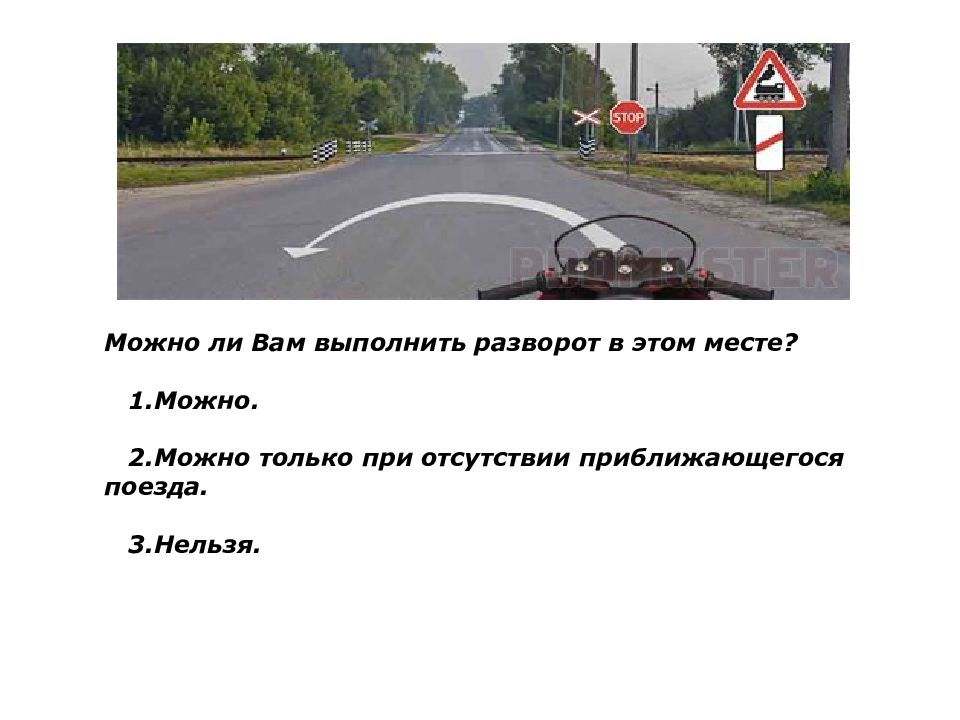 9701 тс
2.35312 0 Тд
[(2) -0,30019] ТДж
-148,613 -22,452 тд
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
4,73281 -4,33789 тд
[(NEC) -250.002 (Лаборатория) -249.997 (Америка \ 054)] TJ
/ R12 7.9701 Тс
100,267 4,33789 тд
[(2) -0,30019] ТДж
/ R10 11.9552 Тс
4,73164 -4,33789 тд
[(UC) -249.997 (San) -249.989 (Die) 15 (go)] TJ
/ R8 11.9552 Тс
-170,211 -41,0461 тд
(Аннотация) Tj
/ R16 9.9626 Тс
1.02 0 0 1 62.0672 534.746 тм
[(T) 54.0075 (r) 15.014 (ajectory) -462.014 (pr) 37.0084 (ediction) -462.006 (is) -460.993 (a) -461.009 (безопасность \ 055critical) -460.989 (инструмент) -462.002 (для) -460.986 (au \ 055)] TJ
-11,7207 -11,9551 тд
[(тонно) -279,009 (автомобили) -277,993 (до) -278,994 (план) -277,981 (и) -279,019 (е) 20,0034 (xecute) -279,014 (действия \ 056) -404,008 (наши) -278,995 (работа) ] TJ
0,989 0 0 1 50,1121 510,835 тм
[(адрес) 37.0125 (esses) -252.987 (два) -253.997 (k) 10.003 (e) 31.015 (y) -253.995 (c) 14.9983 (halleng) 9.99556 (es) -253.993 (in) -253.015 (tr) 14.9946) (заводской) -254.002 (пр) 38.
9701 тс
2.35312 0 Тд
[(2) -0,30019] ТДж
-148,613 -22,452 тд
[(1) -0,30019] ТДж
/ R10 11.9552 Тс
4,73281 -4,33789 тд
[(NEC) -250.002 (Лаборатория) -249.997 (Америка \ 054)] TJ
/ R12 7.9701 Тс
100,267 4,33789 тд
[(2) -0,30019] ТДж
/ R10 11.9552 Тс
4,73164 -4,33789 тд
[(UC) -249.997 (San) -249.989 (Die) 15 (go)] TJ
/ R8 11.9552 Тс
-170,211 -41,0461 тд
(Аннотация) Tj
/ R16 9.9626 Тс
1.02 0 0 1 62.0672 534.746 тм
[(T) 54.0075 (r) 15.014 (ajectory) -462.014 (pr) 37.0084 (ediction) -462.006 (is) -460.993 (a) -461.009 (безопасность \ 055critical) -460.989 (инструмент) -462.002 (для) -460.986 (au \ 055)] TJ
-11,7207 -11,9551 тд
[(тонно) -279,009 (автомобили) -277,993 (до) -278,994 (план) -277,981 (и) -279,019 (е) 20,0034 (xecute) -279,014 (действия \ 056) -404,008 (наши) -278,995 (работа) ] TJ
0,989 0 0 1 50,1121 510,835 тм
[(адрес) 37.0125 (esses) -252.987 (два) -253.997 (k) 10.003 (e) 31.015 (y) -253.995 (c) 14.9983 (halleng) 9.99556 (es) -253.993 (in) -253.015 (tr) 14.9946) (заводской) -254.002 (пр) 38. 0148 (редакция \ 054) -254.017 (выучить \ 055)] TJ
1,001 0 0 1 50,1121 498,88 тм
[(ing) -251 (мультимодальный) -249.999 (выходы \ 054) -251.017 (и) -249.997 (лучше) -251.004 (pr) 37.0144 (edictions) -249.985 (by) -250.999 (навязывание)] TJ
1.01 0 0 1 50.1121 486.925 тм
[(constr) 14,9946 (aints) -247,994 (используя) -248,011 (вождение) -248,003 (знания) 9,99275 (e) 14,9897 (\ 056) -308,983 (недавние) -247,986 (методы) -247,998 (имеют)] TJ
0,99 0 0 1 50,1121 474,97 тм
[(ac) 14.9807 (hie) 14.9918 (ved) -249.992 (str) 44.9983 (ong) -249.995 (выступления) -251,002 (с использованием) -251,016 (Multi \ 055Choice) -249,986 (обучение)] TJ
0,995 0 0 1 50,1121 463,015 тм
[(цели) -250.995 (lik) 9.9987 (e) -251.006 (победитель) 20.9863 (\ 055tak) 10.0018 (es \ 055all) -251.014 (\ 050WT) 49.9966 (A \ 051) -250.993 (или) -250.98 (лучший \ 055of \ 055many) 55.9937 (\ 056) -312.011 (Но)] TJ
0,98 0 0 1 50,1121 451,06 тм
[() -215.015 (удар) -214.005 (из) -214.991 (те) -214.983 (методы) -213.987 (в) -214.991 (обучение) -215 (дайвер) 11.
0148 (редакция \ 054) -254.017 (выучить \ 055)] TJ
1,001 0 0 1 50,1121 498,88 тм
[(ing) -251 (мультимодальный) -249.999 (выходы \ 054) -251.017 (и) -249.997 (лучше) -251.004 (pr) 37.0144 (edictions) -249.985 (by) -250.999 (навязывание)] TJ
1.01 0 0 1 50.1121 486.925 тм
[(constr) 14,9946 (aints) -247,994 (используя) -248,011 (вождение) -248,003 (знания) 9,99275 (e) 14,9897 (\ 056) -308,983 (недавние) -247,986 (методы) -247,998 (имеют)] TJ
0,99 0 0 1 50,1121 474,97 тм
[(ac) 14.9807 (hie) 14.9918 (ved) -249.992 (str) 44.9983 (ong) -249.995 (выступления) -251,002 (с использованием) -251,016 (Multi \ 055Choice) -249,986 (обучение)] TJ
0,995 0 0 1 50,1121 463,015 тм
[(цели) -250.995 (lik) 9.9987 (e) -251.006 (победитель) 20.9863 (\ 055tak) 10.0018 (es \ 055all) -251.014 (\ 050WT) 49.9966 (A \ 051) -250.993 (или) -250.98 (лучший \ 055of \ 055many) 55.9937 (\ 056) -312.011 (Но)] TJ
0,98 0 0 1 50,1121 451,06 тм
[() -215.015 (удар) -214.005 (из) -214.991 (те) -214.983 (методы) -213.987 (в) -214.991 (обучение) -215 (дайвер) 11.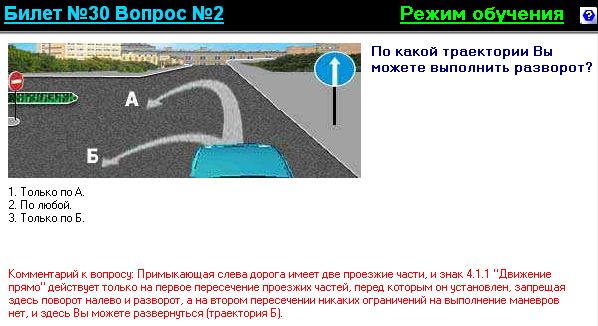 0026 (SE) -215.005 (гипотезы) -214 .993 (is)] TJ
0,999 0 0 1 50,1121 439,104 тм
[(ниже) 20,0136 (\ 055studied) -249,991 (как) -249,008 (успех) 15 (ч) -249,998 (цели) -249,01 (высокая) -250,017 (зависит) -249,007 (по) -249,983 (их) -249,998 (ini \ 055)] TJ
0,98 0 0 1 50,1121 427,149 тм
[(tialization) -234 (для) -233.007 (водолаз) 10.0036 (sity) 56.0093 (\ 056) -309.011 (As) -234.008 (наш) -234.018 9.99483 (st) -233.009 (contrib) 20.0122 (ution \ 054) -237,993 (ср) -233,995 (пр) 46,0032 (опозиция)] ТДж
1.02 0 0 1 50.1121 415.194 тм
[(а) -245.012 (нет) 10.0077 (vel) -245.991 (Divide \ 055And \ 055Conquer) -245.016 (\ 050D) 33.9861 (A) 30.0123 (C \ 051) -246.005 (приблизительно) 45.016 (o) -0.99224 (ac) 15.0134 (h ) -245.012 (тот) -245.007 (действует) -246.013 (как)] TJ
1,002 0 0 1 50,1121 403,239 тм
[(a) -249,983 (лучше) -249,991 (инициализация) -250,005 (tec) 15,0042 (hnique) -249,99 (to) -250,007 (WT) 50,0191 (A) -249,997 (объектив) 9,99794 (\ 054) -250,015 ( r) 37.0178 (результаты)] TJ
1.
0026 (SE) -215.005 (гипотезы) -214 .993 (is)] TJ
0,999 0 0 1 50,1121 439,104 тм
[(ниже) 20,0136 (\ 055studied) -249,991 (как) -249,008 (успех) 15 (ч) -249,998 (цели) -249,01 (высокая) -250,017 (зависит) -249,007 (по) -249,983 (их) -249,998 (ini \ 055)] TJ
0,98 0 0 1 50,1121 427,149 тм
[(tialization) -234 (для) -233.007 (водолаз) 10.0036 (sity) 56.0093 (\ 056) -309.011 (As) -234.008 (наш) -234.018 9.99483 (st) -233.009 (contrib) 20.0122 (ution \ 054) -237,993 (ср) -233,995 (пр) 46,0032 (опозиция)] ТДж
1.02 0 0 1 50.1121 415.194 тм
[(а) -245.012 (нет) 10.0077 (vel) -245.991 (Divide \ 055And \ 055Conquer) -245.016 (\ 050D) 33.9861 (A) 30.0123 (C \ 051) -246.005 (приблизительно) 45.016 (o) -0.99224 (ac) 15.0134 (h ) -245.012 (тот) -245.007 (действует) -246.013 (как)] TJ
1,002 0 0 1 50,1121 403,239 тм
[(a) -249,983 (лучше) -249,991 (инициализация) -250,005 (tec) 15,0042 (hnique) -249,99 (to) -250,007 (WT) 50,0191 (A) -249,997 (объектив) 9,99794 (\ 054) -250,015 ( r) 37.0178 (результаты)] TJ
1.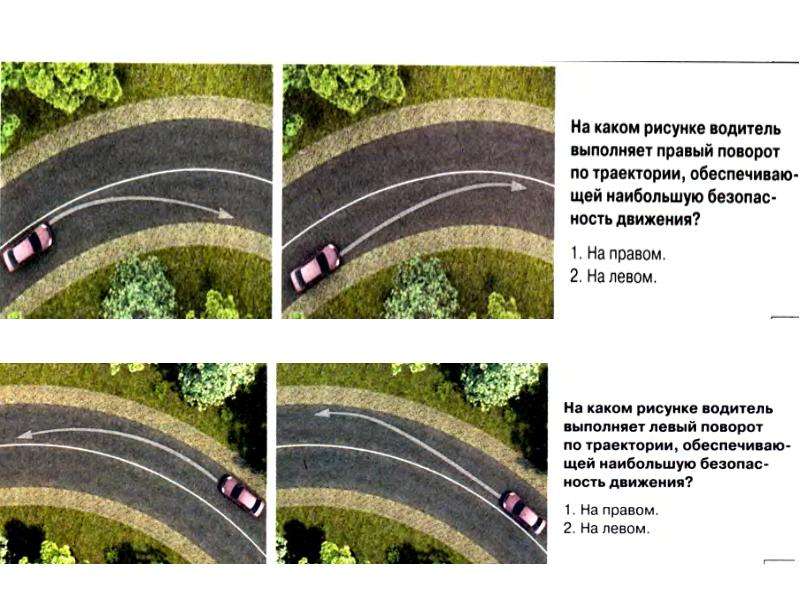 02 0 0 1 50.1121 391.284 тм
[(дюйм) -333.003 (дайвер) 10.0125 (se) -332.012 (выходы) -333 (без) -332,008 (любые) -332,981 (ложные) -332,994 (режимы \ 056) -565,986 (Наши) -332,004 (сек \ 055)] TJ
0,996 0 0 1 50,1121 379,329 тм
[(ond) -250.987 (contrib) 20 (ution) -250.017 (is) -250.99 (a) -250.997 (no) 10.009 (vel) -251.001 (tr) 15.0098 (ajectory) -250.012 (pr) 36.9874 (ediction) -251.001 (фр) 15.011 (амэ) 15.0036 (работа)] TJ
1.012 0 0 1 50.1121 367.373 тм
[(называется) -247.018 (ALAN) -246.986 (тот) -248.008 (использует) -246.981 (e) 19.9835 (присутствует) -246.991 (полоса) -247.988 (осевые линии) -247,009 (as) -247,019 (anc) 14,9964 (горизонт.) 10,0154 (s)] TJ
1.02 0 0 1 50.1121 355.418 тм
[(to) -257.006 (pr) 44.0046 (o) 10.0011 (vide) -257.016 (tr) 15.0134 (ajectories) -256.99 (constr) 14.9857 (ained) -257.017 (to) -257.006 (the) -256.993 (input) -256.993 (полосы \ 056) -340.01 (Наши)] TJ
1.01 0 0 1 50.1121 343.463 тм
[(fr) 15.0025 (ame) 14.9843 (работа) -246.995 (pr) 44.9947 (o) 8.
02 0 0 1 50.1121 391.284 тм
[(дюйм) -333.003 (дайвер) 10.0125 (se) -332.012 (выходы) -333 (без) -332,008 (любые) -332,981 (ложные) -332,994 (режимы \ 056) -565,986 (Наши) -332,004 (сек \ 055)] TJ
0,996 0 0 1 50,1121 379,329 тм
[(ond) -250.987 (contrib) 20 (ution) -250.017 (is) -250.99 (a) -250.997 (no) 10.009 (vel) -251.001 (tr) 15.0098 (ajectory) -250.012 (pr) 36.9874 (ediction) -251.001 (фр) 15.011 (амэ) 15.0036 (работа)] TJ
1.012 0 0 1 50.1121 367.373 тм
[(называется) -247.018 (ALAN) -246.986 (тот) -248.008 (использует) -246.981 (e) 19.9835 (присутствует) -246.991 (полоса) -247.988 (осевые линии) -247,009 (as) -247,019 (anc) 14,9964 (горизонт.) 10,0154 (s)] TJ
1.02 0 0 1 50.1121 355.418 тм
[(to) -257.006 (pr) 44.0046 (o) 10.0011 (vide) -257.016 (tr) 15.0134 (ajectories) -256.99 (constr) 14.9857 (ained) -257.017 (to) -257.006 (the) -256.993 (input) -256.993 (полосы \ 056) -340.01 (Наши)] TJ
1.01 0 0 1 50.1121 343.463 тм
[(fr) 15.0025 (ame) 14.9843 (работа) -246.995 (pr) 44.9947 (o) 8.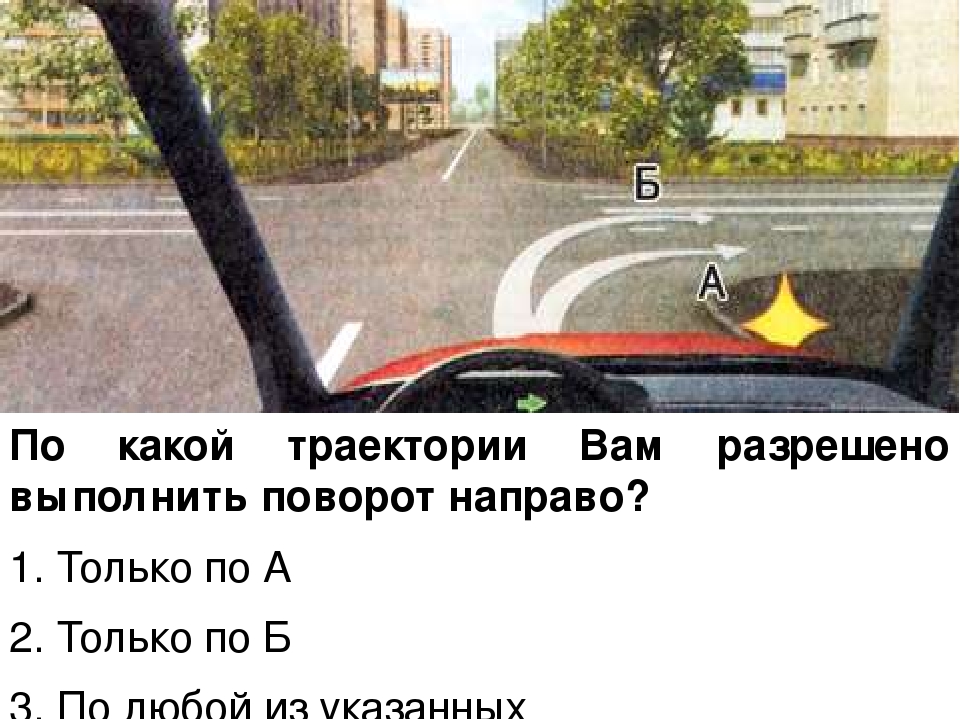 99311 (vides) -245.995 (multi \ 055a) 10.0012 (g) 10.0025 (ent) -246.984 (tr) 15.0019 (ajectory) — 247.008 (выходы) -247.013 (дюйм) -246.018 (a) -246.993 (для) 19.9976 (\ 055)] TJ
1.02 0 0 1 50.1121 331.508 тм
[(война) 35,9922 (г) -258,005 (пас) -256,993 (по) -257,991 (захват) -257,982 (интер) 14,9953 (действия) -257,995 (трон) 44,0046 (ough) -257,985 (гипер) 36,0042 (столбец) ] TJ
0,982 0 0 1 50,1121 319,553 тм
[(дескриптор) 10.0113 (s) -254.996 (и) -254.988 (incorpor) 16.0161 (ating) -254.984 (сцена) -255.005 (информация) -255.004 (in) -255.014 (the) -255.012 (form)] TJ
1.02 0 0 1 50.1121 307.598 тм
[(из) -305.018 (r) 14.0145 (звездочкой) -304.994 (ima) 10.0137 (g) 10 (es) -305.987 (и) -305.005 (per) 18.9943 (\ 055a) 9.99209 (g) 10 (ent) — 306.003 (полоса) -304.998 (anc) 15.0182 (hor) 9.99209 (s \ 056) -484.995 (Experi \ 055)] TJ
11.9559 TL
Т *
[(ments) -332.991 (on) -332.995 (синтетический) -333.01 (and) -332.989 (r) 37.0024 (eal) -332.988 (data) -332.989 (show) -332.989 (that) -332.
99311 (vides) -245.995 (multi \ 055a) 10.0012 (g) 10.0025 (ent) -246.984 (tr) 15.0019 (ajectory) — 247.008 (выходы) -247.013 (дюйм) -246.018 (a) -246.993 (для) 19.9976 (\ 055)] TJ
1.02 0 0 1 50.1121 331.508 тм
[(война) 35,9922 (г) -258,005 (пас) -256,993 (по) -257,991 (захват) -257,982 (интер) 14,9953 (действия) -257,995 (трон) 44,0046 (ough) -257,985 (гипер) 36,0042 (столбец) ] TJ
0,982 0 0 1 50,1121 319,553 тм
[(дескриптор) 10.0113 (s) -254.996 (и) -254.988 (incorpor) 16.0161 (ating) -254.984 (сцена) -255.005 (информация) -255.004 (in) -255.014 (the) -255.012 (form)] TJ
1.02 0 0 1 50.1121 307.598 тм
[(из) -305.018 (r) 14.0145 (звездочкой) -304.994 (ima) 10.0137 (g) 10 (es) -305.987 (и) -305.005 (per) 18.9943 (\ 055a) 9.99209 (g) 10 (ent) — 306.003 (полоса) -304.998 (anc) 15.0182 (hor) 9.99209 (s \ 056) -484.995 (Experi \ 055)] TJ
11.9559 TL
Т *
[(ments) -332.991 (on) -332.995 (синтетический) -333.01 (and) -332.989 (r) 37.0024 (eal) -332.988 (data) -332.989 (show) -332.989 (that) -332. 997 (the) -332.989] (пр) 44.0046 (опровергнуто)] TJ
1,004 0 0 1 49,7531 283,687 тм
[(D) 34.9811 (A) 30.0097 (C) -248.011 (захват) 36.9819 (es) -247.985 (the) -247.015 (data) -247.989 (distrib) 20.0171 (ution) -246.99 (лучше) -248.008 (сравнение) 36.988 (e) -248.018 (t) 0.99829 (o) -247.981 (другие)] TJ
1.01 0 0 1 49.2852 271.732 тм
[(WT) 49.9886 (A) -246.981 (family) -245.999 (of) -246.018 (objects \ 056) -306.016 (Далее) 109.987 (\ 054) -246.986 (we) -245.985 (show) -246.003 (that) -245.989 (наш) -245.982 (ALAN)] TJ
0,993 0 0 1 50,1121 259,777 тм
[(приблизительно) 44.9858 (oac) 15.0181 (h) -251.015 (pr) 45.9834 (o) 9.98491 (видео) -250,995 (on) -250,981 (номинал) -250,992 (или) -252,014 (лучше) -251,013 (производительность) -250,992 (с) -251 (SO) 40,9885 (T) 49,9936 (A)] TJ
1 0 0 1 50,1121 247,822 тм
[(методы) -250.01 (e) 15.0128 (оценка) -250.011 (on) -249.988 (Nuscenes) -250.015 (город) -250.011 (вождение) -250.005 (benc) 15.0196 (hmark \ 056)] TJ
/ R8 11.9552 Тс
39.1887 TL
Т *
[(1 \ 056) -249,99 (Intr) 18,0146 (производство)] TJ
/ R10 9.
997 (the) -332.989] (пр) 44.0046 (опровергнуто)] TJ
1,004 0 0 1 49,7531 283,687 тм
[(D) 34.9811 (A) 30.0097 (C) -248.011 (захват) 36.9819 (es) -247.985 (the) -247.015 (data) -247.989 (distrib) 20.0171 (ution) -246.99 (лучше) -248.008 (сравнение) 36.988 (e) -248.018 (t) 0.99829 (o) -247.981 (другие)] TJ
1.01 0 0 1 49.2852 271.732 тм
[(WT) 49.9886 (A) -246.981 (family) -245.999 (of) -246.018 (objects \ 056) -306.016 (Далее) 109.987 (\ 054) -246.986 (we) -245.985 (show) -246.003 (that) -245.989 (наш) -245.982 (ALAN)] TJ
0,993 0 0 1 50,1121 259,777 тм
[(приблизительно) 44.9858 (oac) 15.0181 (h) -251.015 (pr) 45.9834 (o) 9.98491 (видео) -250,995 (on) -250,981 (номинал) -250,992 (или) -252,014 (лучше) -251,013 (производительность) -250,992 (с) -251 (SO) 40,9885 (T) 49,9936 (A)] TJ
1 0 0 1 50,1121 247,822 тм
[(методы) -250.01 (e) 15.0128 (оценка) -250.011 (on) -249.988 (Nuscenes) -250.015 (город) -250.011 (вождение) -250.005 (benc) 15.0196 (hmark \ 056)] TJ
/ R8 11.9552 Тс
39.1887 TL
Т *
[(1 \ 056) -249,99 (Intr) 18,0146 (производство)] TJ
/ R10 9.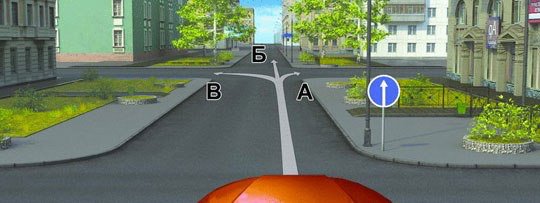 9626 Тс
1.02 0 0 1 62.0672 188.597 тм
[(Прогноз) -273.006 (из) -273.006 (ди) 23.9928 (v) 14,9977 (erse) -273 (мультимодальный) -272,998 (bee) 19,9914 (viors) -273,015 (is) -272,982 (a) -272,989 (критический)] TJ
0,998 0 0 1 50,1121 176,641 тм
[(потребность) -249.998 (to) -248.981 (proacti) 25.0128 (v) 14.9932 (ely) -249.993 (mak) 9.99872 (e) -250.017 (безопасный) -249.017 (решения) -249.988 (для) -250.007 (автономный ) -249,99 (v) 14,9932 (e) 0,99201 (\ 055)] TJ
1.02 0 0 1 50.1121 164.686 тм
[(hicles \ 056) -579.986 (A) -337.992 (major) -336.988 (вызов) -337.009 (ложь) -338.009 (in) -337 (предсказание) -337.002 (не) -336,994 (только) -337,987 (в)] TJ
1,002 0 0 1 50,1121 152,731 тм
[(большинство) -248,99 (доминирующее) -248,998 (режимы) -248,998 (б) 19,9812 (ут) -248,99 (также) -249,986 (бухгалтерский учет) -249,009 (для) -249,012 (в) -249,009 (меньше) -248,995 (dom \ 055)] TJ
1.02 0 0 1 50.1121 140.776 тм
[(inant) -355.009 (один) -355.985 (тот) -355.016 (может) -355.017 (возникать) -355.
9626 Тс
1.02 0 0 1 62.0672 188.597 тм
[(Прогноз) -273.006 (из) -273.006 (ди) 23.9928 (v) 14,9977 (erse) -273 (мультимодальный) -272,998 (bee) 19,9914 (viors) -273,015 (is) -272,982 (a) -272,989 (критический)] TJ
0,998 0 0 1 50,1121 176,641 тм
[(потребность) -249.998 (to) -248.981 (proacti) 25.0128 (v) 14.9932 (ely) -249.993 (mak) 9.99872 (e) -250.017 (безопасный) -249.017 (решения) -249.988 (для) -250.007 (автономный ) -249,99 (v) 14,9932 (e) 0,99201 (\ 055)] TJ
1.02 0 0 1 50.1121 164.686 тм
[(hicles \ 056) -579.986 (A) -337.992 (major) -336.988 (вызов) -337.009 (ложь) -338.009 (in) -337 (предсказание) -337.002 (не) -336,994 (только) -337,987 (в)] TJ
1,002 0 0 1 50,1121 152,731 тм
[(большинство) -248,99 (доминирующее) -248,998 (режимы) -248,998 (б) 19,9812 (ут) -248,99 (также) -249,986 (бухгалтерский учет) -249,009 (для) -249,012 (в) -249,009 (меньше) -248,995 (dom \ 055)] TJ
1.02 0 0 1 50.1121 140.776 тм
[(inant) -355.009 (один) -355.985 (тот) -355.016 (может) -355.017 (возникать) -355.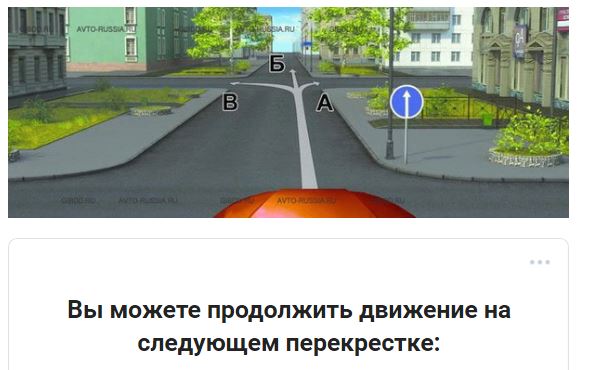 994 (спорадически) 64.008 (\ 056) -634.013 (Следовательно, \ 054) -383.012 (там) -356.008 (это )] TJ
11.9551 TL
Т *
[(потребность) -309.019 (для) -308.994 (модели) -310.005 (то) -309.003 (может) -308.987 (распутать) -309.01 (то) -309.003 (правдоподобно) -309.99 (вывод)] TJ
Т *
[(пробел) -249.984 (и) -249.989 (pro) 13.9971 (vide) -249.99 (di) 24.9922 (v) 13.9983 (erse) -250.012 (фьючерсы) -249.985 (for) -249.988 (an) 15.0134 (y) -251,008 (gi) 24,9934 (v) 14,9989 (en) -249,994 (количество) -250,984 (из)] TJ
1.013 0 0 1 50.1121 104.91 Тм
[(образцы \ 056) -307.986 (далее) 39.0011 (\ 054) -247.992 (a) -247.018 (v) 23.9941 (аст) -246.998 (большинство) -248.006 (из) -247.013 (актеры) -247.992 (e) 14.984 (x) 15.0131 (ecute) -248.006 (социально)] TJ
0,987 0 0 1 50,1121 92,9551 тм
[(приемлемо) -252,981 (маневр) 15,0076 (ers) -252,997 (тот) -252,017 (придерживаться) -253,002 (с) -253,01 (тот) -253,01 (базовый) -253 (сцена)] TJ
0,994 0 0 1 50,1121 81 тм
[(структура \ 056) -316.01 (Predi) 1.0034 (cting) -252.
994 (спорадически) 64.008 (\ 056) -634.013 (Следовательно, \ 054) -383.012 (там) -356.008 (это )] TJ
11.9551 TL
Т *
[(потребность) -309.019 (для) -308.994 (модели) -310.005 (то) -309.003 (может) -308.987 (распутать) -309.01 (то) -309.003 (правдоподобно) -309.99 (вывод)] TJ
Т *
[(пробел) -249.984 (и) -249.989 (pro) 13.9971 (vide) -249.99 (di) 24.9922 (v) 13.9983 (erse) -250.012 (фьючерсы) -249.985 (for) -249.988 (an) 15.0134 (y) -251,008 (gi) 24,9934 (v) 14,9989 (en) -249,994 (количество) -250,984 (из)] TJ
1.013 0 0 1 50.1121 104.91 Тм
[(образцы \ 056) -307.986 (далее) 39.0011 (\ 054) -247.992 (a) -247.018 (v) 23.9941 (аст) -246.998 (большинство) -248.006 (из) -247.013 (актеры) -247.992 (e) 14.984 (x) 15.0131 (ecute) -248.006 (социально)] TJ
0,987 0 0 1 50,1121 92,9551 тм
[(приемлемо) -252,981 (маневр) 15,0076 (ers) -252,997 (тот) -252,017 (придерживаться) -253,002 (с) -253,01 (тот) -253,01 (базовый) -253 (сцена)] TJ
0,994 0 0 1 50,1121 81 тм
[(структура \ 056) -316.01 (Predi) 1.0034 (cting) -252. 987 (социально) -253.018 (нежизнеспособная) -252.998 (выходы) -252.005 (can) -252.986 (свинец) -253 (to)] TJ
ET
Q
q
2362,49 0 0 1559,46 3088,62 4137,79 см
/ R19 Do
Q
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1.013 0 0 1 308.862 395.448 тм
[(Рисунок) -248.016 (1 \ 072) -307.006 (Изображает) -248.013 (траектория) -246.988 (прогноз) -247.979 (проблема) -247.999 (дюйм) -247.012 (an) -247.989 (inter) 20.011 (\ 055 )] TJ
0,98 0 0 1 308,862 383,492 тм
[(раздел) -236.995 (сценарий) -236.993 (wi) 1.00774 (th) -236.998 (возможно) -237.02 (переулок) -237.005 (якоря) -236.98 (для) -236.005 (агенты) -237.01 (sho) 25 ( wn)] TJ
1 0 0 1 308,862 371,537 тм
[(как) -249.995 (цветной) -249.983 (пунктирный) -249.985 (строки \ 056)] TJ
1.016 0 0 1 308,862 334,06 тм
[(небезопасно) -247.018 (планирование) -247.985 (решения) -247.001 (с) -247.985 (некоторые) -246.992 (больше) -247.995 (опасно) -247.001 (чем)] TJ
1.02 0 0 1 308.862 322.105 тм
[(the) -288.014 (другие) -288.992 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.
987 (социально) -253.018 (нежизнеспособная) -252.998 (выходы) -252.005 (can) -252.986 (свинец) -253 (to)] TJ
ET
Q
q
2362,49 0 0 1559,46 3088,62 4137,79 см
/ R19 Do
Q
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1.013 0 0 1 308.862 395.448 тм
[(Рисунок) -248.016 (1 \ 072) -307.006 (Изображает) -248.013 (траектория) -246.988 (прогноз) -247.979 (проблема) -247.999 (дюйм) -247.012 (an) -247.989 (inter) 20.011 (\ 055 )] TJ
0,98 0 0 1 308,862 383,492 тм
[(раздел) -236.995 (сценарий) -236.993 (wi) 1.00774 (th) -236.998 (возможно) -237.02 (переулок) -237.005 (якоря) -236.98 (для) -236.005 (агенты) -237.01 (sho) 25 ( wn)] TJ
1 0 0 1 308,862 371,537 тм
[(как) -249.995 (цветной) -249.983 (пунктирный) -249.985 (строки \ 056)] TJ
1.016 0 0 1 308,862 334,06 тм
[(небезопасно) -247.018 (планирование) -247.985 (решения) -247.001 (с) -247.985 (некоторые) -246.992 (больше) -247.995 (опасно) -247.001 (чем)] TJ
1.02 0 0 1 308.862 322.105 тм
[(the) -288.014 (другие) -288.992 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9. 9626 Тс
1 0 0 1 355,358 322,105 тм
(7) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1,02 0 0 1 360,34 322,105 тм
[(\ 135 \ 056) -433.016 (F) 13.9923 (или) -287.997 (e) 15.0061 (xample \ 054) -298.999 (a) -289.018 (метод) -287.995 (то) -288.014 (про) 13.9971 (видео) -287.985 (близко)] TJ
-50,4684 -11,9551 тд
[(достаточно) -283,99 (прогнозы) -285,006 (это) -284,016 (делает) -284,987 (нет) -283,983 (фолло) 24,991 (ш) -284,982 (дорога) -284,016 (семантика) -285,016 (есть)] TJ
0,98 0 0 1 308,862 298,194 тм
[(больше) -219.011 (опасно) -219.009 (сравнивайте) -220.011 (к) -218.991 (аналогично) -219.021 (выполняя) -218.981 (метод) -219.991 (то)] TJ
1 0 0 1 308,862 286,239 тм
[(придерживается) -249.997 (to) -249.985 (the) -249.99 (сцена) -250 (структура \ 056)] TJ
1.02 0 0 1 320,817 272,283 тм
[(T) 34,0101 (обычно) 64,008 (\ 054) -728 (общие) 24,9958 (v) 13,9971 (e) -630,984 (модели) -631,983 (га) 20,0082 (v) 13,9971 (e) -630,984 (бывшие) — 631,993 (широко)] TJ
0,99 0 0 1 308,862 260,328 тм
[(адаптировано) -252,005 (в) -252,013 (захват) -251,991 (в) -251,986 (неопределенности) -253,018 (связано) -252,003 (в) -252,013 (траектория) -252,008 (до \ 055)] TJ
1. 019 0 0 1 308.862 248.372 тм
[(дикция) -243.989 (проблемы) -244.011 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 383,181 248,372 тм
(25) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 393.143 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 398,157 248,372 тм
(22) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1,019 0 0 1 408,12 248,372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 413,133 248,372 тм
(37) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 423.096 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 428,11 248,372 тм
(21) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 438.072 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 443,086 248,372 тм
(39) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 453.049 248.372 тм
[(\ 135 \ 056) -303,996 (Ho) 24,9867 (we) 24,0103 (v) 14,9824 (er) 38,9927 (\ 054) -243,98 (общие) 25,0107 (v) 13,982 (e)] TJ
1,02 0 0 1 308,862 236,417 тм
[(методы) -293.
9626 Тс
1 0 0 1 355,358 322,105 тм
(7) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1,02 0 0 1 360,34 322,105 тм
[(\ 135 \ 056) -433.016 (F) 13.9923 (или) -287.997 (e) 15.0061 (xample \ 054) -298.999 (a) -289.018 (метод) -287.995 (то) -288.014 (про) 13.9971 (видео) -287.985 (близко)] TJ
-50,4684 -11,9551 тд
[(достаточно) -283,99 (прогнозы) -285,006 (это) -284,016 (делает) -284,987 (нет) -283,983 (фолло) 24,991 (ш) -284,982 (дорога) -284,016 (семантика) -285,016 (есть)] TJ
0,98 0 0 1 308,862 298,194 тм
[(больше) -219.011 (опасно) -219.009 (сравнивайте) -220.011 (к) -218.991 (аналогично) -219.021 (выполняя) -218.981 (метод) -219.991 (то)] TJ
1 0 0 1 308,862 286,239 тм
[(придерживается) -249.997 (to) -249.985 (the) -249.99 (сцена) -250 (структура \ 056)] TJ
1.02 0 0 1 320,817 272,283 тм
[(T) 34,0101 (обычно) 64,008 (\ 054) -728 (общие) 24,9958 (v) 13,9971 (e) -630,984 (модели) -631,983 (га) 20,0082 (v) 13,9971 (e) -630,984 (бывшие) — 631,993 (широко)] TJ
0,99 0 0 1 308,862 260,328 тм
[(адаптировано) -252,005 (в) -252,013 (захват) -251,991 (в) -251,986 (неопределенности) -253,018 (связано) -252,003 (в) -252,013 (траектория) -252,008 (до \ 055)] TJ
1. 019 0 0 1 308.862 248.372 тм
[(дикция) -243.989 (проблемы) -244.011 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 383,181 248,372 тм
(25) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 393.143 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 398,157 248,372 тм
(22) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1,019 0 0 1 408,12 248,372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 413,133 248,372 тм
(37) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 423.096 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 428,11 248,372 тм
(21) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 438.072 248.372 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 443,086 248,372 тм
(39) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.019 0 0 1 453.049 248.372 тм
[(\ 135 \ 056) -303,996 (Ho) 24,9867 (we) 24,0103 (v) 14,9824 (er) 38,9927 (\ 054) -243,98 (общие) 25,0107 (v) 13,982 (e)] TJ
1,02 0 0 1 308,862 236,417 тм
[(методы) -293. 007 (май) -293.004 (суф) 24.006 (ж) 0.98984 (er) -293.987 (от) -292.997 (mode) -292.997 (collapse) -292.992 (issues \ 054) -304.99 (which) -292.992 (re \ 055)] TJ
0,994 0 0 1 308,862 224,462 тм
[(duces) -250.017 (их) -250.015 (применимость) -250.003 (для) -249.988 (безопасность) -250.017 (критическая) -249.993 (приложения) -249.988 (такие)] TJ
1.02 0 0 1 308.862 212.507 тм
[(as) -357.997 (self \ 055dri) 25.003 (ving) -358.014 (cars \ 056) -641.005 (Недавние) -358 (методы) -358.009 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 470.493 212,507 тм
(32) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 480.456 212.507 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 486,631 212,507 тм
(28) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 496.594 212.507 тм
[(\ 135) -358.004 (использовать) -356.991 (Multi \ 055)] TJ
0,98 0 0 1 308,862 200,552 тм
[(Выбор) -219.991 (Learni) 0.99273 (n) -0.99773 (g) -219.009 (objecti) 25.
007 (май) -293.004 (суф) 24.006 (ж) 0.98984 (er) -293.987 (от) -292.997 (mode) -292.997 (collapse) -292.992 (issues \ 054) -304.99 (which) -292.992 (re \ 055)] TJ
0,994 0 0 1 308,862 224,462 тм
[(duces) -250.017 (их) -250.015 (применимость) -250.003 (для) -249.988 (безопасность) -250.017 (критическая) -249.993 (приложения) -249.988 (такие)] TJ
1.02 0 0 1 308.862 212.507 тм
[(as) -357.997 (self \ 055dri) 25.003 (ving) -358.014 (cars \ 056) -641.005 (Недавние) -358 (методы) -358.009 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 470.493 212,507 тм
(32) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 480.456 212.507 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 486,631 212,507 тм
(28) Tj
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 496.594 212.507 тм
[(\ 135) -358.004 (использовать) -356.991 (Multi \ 055)] TJ
0,98 0 0 1 308,862 200,552 тм
[(Выбор) -219.991 (Learni) 0.99273 (n) -0.99773 (g) -219.009 (objecti) 25. 0108 (v) 16.0062 (es) -220.006 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 420,64 200,552 тм
(26) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
0,98 0 0 1 430,603 200,552 тм
[(\ 135) -220.011 (li) 0.99023 (k) 10.0073 (e) -219.996 (победитель) 20.9949 (\ 055tak) 9.99733 (es \ 055all) -219.996 (\ 050WT) 94.9821 (A \ 051)] TJ
0,984 0 0 1 308,862 188,597 тм
[(б) 20,008 (ут) -252,994 (суф) 26,0025 (е) -0,99617 (эр) -252,997 (от) -252,987 (я) 0,98621 (п) -0,99119 (с) 1,0136 (таблица) -253,002 (ассоциированный) -253.012 (с) -252.987 (netw) 10.0015 (ork) -253.017 (initializa \ 055)] TJ
1.02 0 0 1 308,862 176,641 тм
[(тион) -273,991 (\ 133)] ТДж
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 330,84 176,641 тм
(30) Чт
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 340.803 176.641 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 346,126 176,641 тм
(34) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 356.089 176.
0108 (v) 16.0062 (es) -220.006 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 тс
1 0 0 1 420,64 200,552 тм
(26) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
0,98 0 0 1 430,603 200,552 тм
[(\ 135) -220.011 (li) 0.99023 (k) 10.0073 (e) -219.996 (победитель) 20.9949 (\ 055tak) 9.99733 (es \ 055all) -219.996 (\ 050WT) 94.9821 (A \ 051)] TJ
0,984 0 0 1 308,862 188,597 тм
[(б) 20,008 (ут) -252,994 (суф) 26,0025 (е) -0,99617 (эр) -252,997 (от) -252,987 (я) 0,98621 (п) -0,99119 (с) 1,0136 (таблица) -253,002 (ассоциированный) -253.012 (с) -252.987 (netw) 10.0015 (ork) -253.017 (initializa \ 055)] TJ
1.02 0 0 1 308,862 176,641 тм
[(тион) -273,991 (\ 133)] ТДж
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 330,84 176,641 тм
(30) Чт
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 340.803 176.641 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 346,126 176,641 тм
(34) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1.02 0 0 1 356.089 176. 641 тм
[(\ 135 \ 056) -390.001 (As) -274.005 (a) -273.988 -273.991 (contrib) 20.013 (ution \ 054) -280.994 (we) -274.012 (propose) -273.988 (a) -273.988 (Di) 25 (vide)] TJ
1.015 0 0 1 308.862 164.686 тм
[(и) -245.006 (Conquer) -244.982 (\ 050D) 40.0035 (A) 38.9894 (C \ 051) -244.997 (подход) -244.014 (тот) -244.98 (pro) 14.9932 (vides) -244.985 (a) — 245 (лучше) -245.019 (начальное \ 055)] TJ
1.02 0 0 1 308.862 152.731 тм
[(ization) -346.999 (to) -345.994 (the) -346.982 (WT) 91 (A) -345.987 (objecti) 23.9868 (v) 14.9965 (e \ 056) -609.01 (Our) -345.992 (method) -347 (решено) 14.9869 (es) -347 (вопросы)] TJ
0,988 0 0 1 308,862 140,776 тм
[(связанные) -254.014 (к) -252,987 (ложный) -253,999 (режимы) -253,014 (где) -254,016 (некоторые) -254,011 (h) 5,00532 (гипотезы) -253,004 (являются) -253,986 (либо)] TJ
1.02 0 0 1 308.862 128.821 тм
[(нетренированный) -282,991 (дюйм) -283,99 (тот) -283,017 (тренировочный) -283,012 (процесс \ 054) -293,007 (или) -283,997 (охват) -282,998 (равновесный) -283,003 (po \ 055)] TJ
11.
641 тм
[(\ 135 \ 056) -390.001 (As) -274.005 (a) -273.988 -273.991 (contrib) 20.013 (ution \ 054) -280.994 (we) -274.012 (propose) -273.988 (a) -273.988 (Di) 25 (vide)] TJ
1.015 0 0 1 308.862 164.686 тм
[(и) -245.006 (Conquer) -244.982 (\ 050D) 40.0035 (A) 38.9894 (C \ 051) -244.997 (подход) -244.014 (тот) -244.98 (pro) 14.9932 (vides) -244.985 (a) — 245 (лучше) -245.019 (начальное \ 055)] TJ
1.02 0 0 1 308.862 152.731 тм
[(ization) -346.999 (to) -345.994 (the) -346.982 (WT) 91 (A) -345.987 (objecti) 23.9868 (v) 14.9965 (e \ 056) -609.01 (Our) -345.992 (method) -347 (решено) 14.9869 (es) -347 (вопросы)] TJ
0,988 0 0 1 308,862 140,776 тм
[(связанные) -254.014 (к) -252,987 (ложный) -253,999 (режимы) -253,014 (где) -254,016 (некоторые) -254,011 (h) 5,00532 (гипотезы) -253,004 (являются) -253,986 (либо)] TJ
1.02 0 0 1 308.862 128.821 тм
[(нетренированный) -282,991 (дюйм) -283,99 (тот) -283,017 (тренировочный) -283,012 (процесс \ 054) -293,007 (или) -283,997 (охват) -282,998 (равновесный) -283,003 (po \ 055)] TJ
11.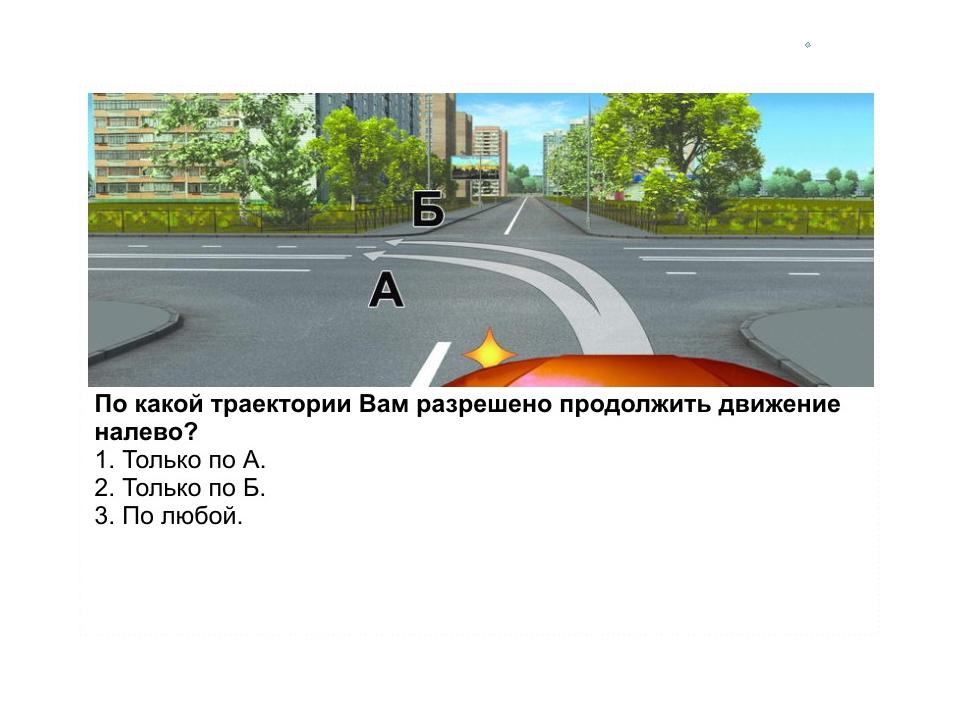 9551 TL
Т *
[(sitions) -253.997 (то) -254.994 (do) -255.001 (не) -254.002 (представлять) -254.994 (an) 15.011 (y) -254.009 (part) -255.004 (of) -255.013 (the) -253 .995 (данные \ 056) -331,99 (шир.) 78,0147 (эл.) -254 (шир.) 23,982 (шир.)] TJ
1.01 0 0 1 308.862 104.91 тм
[(это) -247.991 (the) -249.002 (предлагаемый) -248.005 (D) 39.9928 (A) 38.9835 (C) -248.01 (захватывает) -248.997 (the) -247.993 (data) -247.988 (distrib) 19.9831 (ution ) -248,993 (лучше)] TJ
Т *
[(on) -248.015 (оба) -247.015 (реальные) -247.981 (и) -247 (синтетические) -247.993 (сцены) -247.998 (с) -247.018 (multi \ 055modal) -247.998 (наземные)] TJ
1 0 0 1 308,862 81 тм
[(правда \ 054) -250,012 (по сравнению) -249.988 (to) -249,985 (базовый уровень) -250,017 (WT) 93,009 (A) -249,993 (объекты) 25 (v) 14,9828 (es) -249,997 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 489,873 81 тм
(30) Чт
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 499,835 81 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.
9551 TL
Т *
[(sitions) -253.997 (то) -254.994 (do) -255.001 (не) -254.002 (представлять) -254.994 (an) 15.011 (y) -254.009 (part) -255.004 (of) -255.013 (the) -253 .995 (данные \ 056) -331,99 (шир.) 78,0147 (эл.) -254 (шир.) 23,982 (шир.)] TJ
1.01 0 0 1 308.862 104.91 тм
[(это) -247.991 (the) -249.002 (предлагаемый) -248.005 (D) 39.9928 (A) 38.9835 (C) -248.01 (захватывает) -248.997 (the) -247.993 (data) -247.988 (distrib) 19.9831 (ution ) -248,993 (лучше)] TJ
Т *
[(on) -248.015 (оба) -247.015 (реальные) -247.981 (и) -247 (синтетические) -247.993 (сцены) -247.998 (с) -247.018 (multi \ 055modal) -247.998 (наземные)] TJ
1 0 0 1 308,862 81 тм
[(правда \ 054) -250,012 (по сравнению) -249.988 (to) -249,985 (базовый уровень) -250,017 (WT) 93,009 (A) -249,993 (объекты) 25 (v) 14,9828 (es) -249,997 (\ 133)] TJ
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 489,873 81 тм
(30) Чт
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 499,835 81 тм
(\ 054) Tj
ET
Q
0 1 0 рг
q
10 0 0 10 0 0 см
BT
/ R10 9. 9626 Тс
1 0 0 1 504,816 81 тм
(34) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 514,779 81 тм
(\ 135 \ 056) Tj
-219,658 -29,8879 тд
(1) Tj
ET
Q
Q
Q
q
1 0 0-1 0 792 см
q
1 1 1 пг
/ a0 gs
48.406 3,066 515,188 33,723 пере
ж
0,44706 0,57647 0,77255 rg
/ a1 gs
77,262 5,789 м
71,715 5,789 67,215 10,68 67,215 16,707 в
67.215 22.738 71.715 27.625 77.262 27.625 в
78,852 27,625 80,355 27,223 81,691 26,508 в
79.777 22.742 л
79.008 23.121 78.16 23.332 77.262 23.332 в
73,895 23,332 71,164 20,363 71,164 16,707 в
71.164 13.051 73.895 10.082 77.262 10.082 в
78.598 10.082 79.828 10.555 80.832 11.348 в
83.789 8.402 л
82,031 6,77 79,75 5,789 77,262 5,789 в
час
77,262 5,789 м
ж
78,059 15,016 м
87,273 33,801 л
95.863 15.016 л
91,531 15,016 л
87,273 24,305 л
82,684 15,016 л
час
78,059 15,016 м
ж
96,422 5,812 м
109.984 5.812 л
109.984 9.465 л
100,875 9,465 л
100,875 14,996 л
105,816 14,996 л
105,816 18,547 л
100,875 18,547 л
100,875 27,707 л
96,449 27,707 л
час
96,422 5,812 м
ж
q
1 0 0 1 0 0 см
/ a1 gs
/ x6 Do
Q
Q
Q
Q
q
1 0 0 1 0 0 см
BT
/ F1 12 Тс
14,4 турецких лир
ET
1 1 1 пг
п
270 47 72 14 об.
9626 Тс
1 0 0 1 504,816 81 тм
(34) Ти
ET
Q
0 г
q
10 0 0 10 0 0 см
BT
/ R10 9.9626 Тс
1 0 0 1 514,779 81 тм
(\ 135 \ 056) Tj
-219,658 -29,8879 тд
(1) Tj
ET
Q
Q
Q
q
1 0 0-1 0 792 см
q
1 1 1 пг
/ a0 gs
48.406 3,066 515,188 33,723 пере
ж
0,44706 0,57647 0,77255 rg
/ a1 gs
77,262 5,789 м
71,715 5,789 67,215 10,68 67,215 16,707 в
67.215 22.738 71.715 27.625 77.262 27.625 в
78,852 27,625 80,355 27,223 81,691 26,508 в
79.777 22.742 л
79.008 23.121 78.16 23.332 77.262 23.332 в
73,895 23,332 71,164 20,363 71,164 16,707 в
71.164 13.051 73.895 10.082 77.262 10.082 в
78.598 10.082 79.828 10.555 80.832 11.348 в
83.789 8.402 л
82,031 6,77 79,75 5,789 77,262 5,789 в
час
77,262 5,789 м
ж
78,059 15,016 м
87,273 33,801 л
95.863 15.016 л
91,531 15,016 л
87,273 24,305 л
82,684 15,016 л
час
78,059 15,016 м
ж
96,422 5,812 м
109.984 5.812 л
109.984 9.465 л
100,875 9,465 л
100,875 14,996 л
105,816 14,996 л
105,816 18,547 л
100,875 18,547 л
100,875 27,707 л
96,449 27,707 л
час
96,422 5,812 м
ж
q
1 0 0 1 0 0 см
/ a1 gs
/ x6 Do
Q
Q
Q
Q
q
1 0 0 1 0 0 см
BT
/ F1 12 Тс
14,4 турецких лир
ET
1 1 1 пг
п
270 47 72 14 об. е *
0,5 0,5 0,5 мкг
BT
/ F2 9 Тс
10,8 турецких лир
ET
BT
1 0 0 1 294,75 50 тм
(15799) Tj
Т *
ET
Q конечный поток
эндобдж
15 0 объект
>
ручей
Икс
TSw.DYnT0, bQY- \ DXT9ʻiS˩ ~ / {) L [hm; .Z
е *
0,5 0,5 0,5 мкг
BT
/ F2 9 Тс
10,8 турецких лир
ET
BT
1 0 0 1 294,75 50 тм
(15799) Tj
Т *
ET
Q конечный поток
эндобдж
15 0 объект
>
ручей
Икс
TSw.DYnT0, bQY- \ DXT9ʻiS˩ ~ / {) L [hm; .Z
《Udacity 自动 驾驶 基础》 第 6 讲 路径 规划 — 知 乎
Лекция 6 Планирование
6.1 Введение в планирование
При планировании, мы включаем HD-карты, локализацию и прогнозирование, чтобы построить траекторию для транспортного средства . Первым шагом в планировании является навигация по маршруту, которая фокусируется на том, как перейти от A к B на карте. Routing принимает данные карты в качестве входных и выходных данных по пути, по которому можно перемещаться. Система навигации в вашем телефоне — это пример планирования маршрута. В Apollo эту задачу выполняет модуль маршрутизации.
После того, как мы построили высокоуровневый маршрут, мы приближаемся к планированию траектории. Планирование траектории — это то, как мы принимаем тонкие решения, чтобы избежать препятствий и сделать поездку более плавной для пассажиров. В Apollo эту задачу выполняет модуль планирования . Цель планирования траектории — создать удобную траекторию без столкновений. Эта траектория определяется последовательностью точек.Каждая точка имеет связанную скорость и метку времени, которая указывает, когда мы должны прибыть в эту точку.
В Apollo эту задачу выполняет модуль планирования . Цель планирования траектории — создать удобную траекторию без столкновений. Эта траектория определяется последовательностью точек.Каждая точка имеет связанную скорость и метку времени, которая указывает, когда мы должны прибыть в эту точку.
Мы собираемся поговорить о планировании в двух разных контекстах . Один находится на очень символическом уровне города , где вы собираетесь спланировать, сколько поворота нужно сделать, чтобы добраться до целевого пункта назначения, а другой находится на уровне траектории движения , где вы решаете, какой именно поворот автомобиль должен сделать. выполняет определенный маневр. Эти траектории — не просто кривые времени, и эти траектории — не просто кривые пространства.Это также временные кривые, потому что вы можете выбрать очень быстро или очень медленно, и при планировании вы должны учитывать, насколько быстро вы можете двигаться, чтобы убедиться, что у вас есть жизнеспособный план. Итак, давайте погрузимся в увлекательный мир планирования.
6.2 Маршрут
Цель маршрута — найти лучший путь для перемещения от A к B на карте. Маршрутизация принимает три входа , первый карту. Картографические данные, которые предоставляет Apollo, включают дорожную сеть и информацию о дорожном движении в реальном времени. Второй , наша текущая позиция на карте. Третий , наш пункт назначения. Пункт назначения обычно исходит от пассажира внутри транспортного средства. С этими тремя входами модуль маршрутизации готов найти маршрут к месту назначения.
6.3 World to Graph
Когда люди пытаются найти маршрут от A до B на карте, они часто прослеживают пути вдоль дорог, чтобы увидеть, ведет ли какой-либо из этих путей к месту назначения. Это называется поиском. Apollo также использует поиск, чтобы найти маршрут , но использует более умный алгоритм поиска.Прежде чем Apollo начнет поиск, он переформатирует карту в структуру данных, называемую grap h.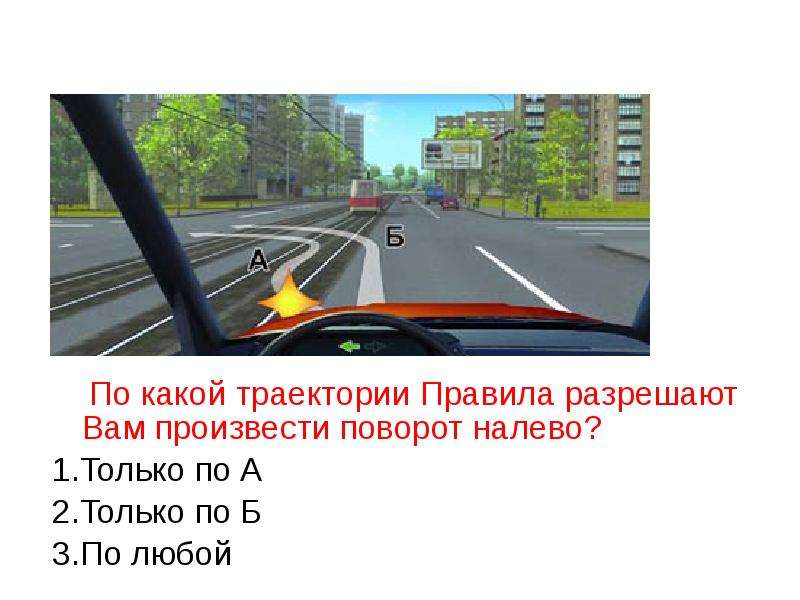 Граф состоит из узлов и ребер. Узлы представляют собой участки дороги, а края — связи между этими участками. Например, на перекрестке наша машина может двигаться от первого узла к второму, третьему или четвертому и наоборот.
Граф состоит из узлов и ребер. Узлы представляют собой участки дороги, а края — связи между этими участками. Например, на перекрестке наша машина может двигаться от первого узла к второму, третьему или четвертому и наоборот.
Мы также можем смоделировать стоимость перехода от одного узла к другому . Например, в реальной жизни для поворота на перекрестке требуется больше усилий, чем для того, чтобы ехать прямо.Таким образом, стоимость перехода от узла один к узлу четыре выше, чем стоимость перехода от узла один к узлу три. Преимущество преобразования нашей карты в граф состоит в том, что информатика открыла множество быстрых алгоритмов для поиска путей в графе. Как только мы нашли хороший путь на графике, его легко преобразовать обратно в маршрут на нашей карте.
6.4 Grid World A_star (A *) — классический алгоритм для обработки поиска пути .Давайте продемонстрируем, как работает A_star, используя сеточный мир.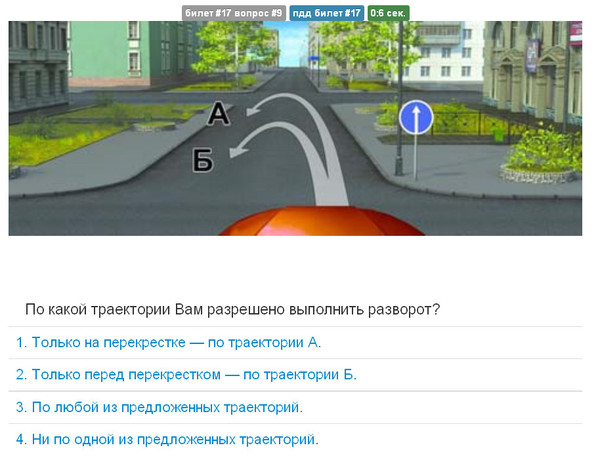 Мы берем каждую ячейку в этом мире как узел, который мы можем перемещать от любого узла к любому из соседних с ним узлов. В этом конкретном мире есть стены, которые блокируют возможные пути.
Мы берем каждую ячейку в этом мире как узел, который мы можем перемещать от любого узла к любому из соседних с ним узлов. В этом конкретном мире есть стены, которые блокируют возможные пути.
Людям легко найти лучший путь, просто взглянув на график. Для компьютера это менее очевидно. Компьютер должен проверить, не ведет ли какой-нибудь путь к цели. Компьютер мог исчерпывающе перебрать все возможные пути, чтобы найти самый короткий.Однако на это уходит много времени, особенно когда карта становится больше. Из любого заданного узла у нас есть до 8 вариантов для нашего следующего шага, поскольку у нас есть 8 соседних ячеек. И для каждого из этих 8 вариантов у нас есть еще 8 вариантов для следующего шага. Если мы расширим все узлы, поиск выльется за пределы того, с чем может справиться даже самый быстрый компьютер.
Начиная с начального узла, нам нужно решить, какой из 8 соседних узлов является наиболее многообещающим кандидатом. Для каждого из узлов-кандидатов мы учитываем две вещи. Сначала , мы вычисляем стоимость, необходимую для перемещения от начального узла до этого узла-кандидата. Второй , мы оцениваем, сколько стоит путешествие от этого узла-кандидата до цели. Стоимость прибытия в узел-кандидат легко подсчитать, потому что он уже находится рядом с нами. Сложнее подсчитать стоимость перехода от узла-кандидата к цели. Но обычно мы можем произвести хорошую оценку, часто просто измеряя расстояние от узла-кандидата до цели. Мы используем переменные g и h для представления каждой из этих затрат. Значение g — это стоимость проезда от начального узла до узла-кандидата, а значение h — это оценочная стоимость или эвристическая стоимость перехода от узла-кандидата к цели.
Сначала , мы вычисляем стоимость, необходимую для перемещения от начального узла до этого узла-кандидата. Второй , мы оцениваем, сколько стоит путешествие от этого узла-кандидата до цели. Стоимость прибытия в узел-кандидат легко подсчитать, потому что он уже находится рядом с нами. Сложнее подсчитать стоимость перехода от узла-кандидата к цели. Но обычно мы можем произвести хорошую оценку, часто просто измеряя расстояние от узла-кандидата до цели. Мы используем переменные g и h для представления каждой из этих затрат. Значение g — это стоимость проезда от начального узла до узла-кандидата, а значение h — это оценочная стоимость или эвристическая стоимость перехода от узла-кандидата к цели.
В зависимости от наших обстоятельств мы можем настроить способ оценки наших затрат. Например, пробки увеличивают стоимость поездки к месту назначения, поэтому путь с интенсивным движением должен включать большие затраты. Для каждого узла-кандидата мы складываем наши значения g и h, чтобы вычислить сумму, которая называется значением f . Лучшим узлом-кандидатом является узел с наименьшим значением f. Каждый раз, когда мы достигаем нового узла, мы повторяем этот процесс, чтобы выбрать следующий узел-кандидат, всегда выбирает узел с наименьшим значением f, который мы еще не посетили. Это алгоритм A * . Он прокладывает путь, который неуклонно продвигается к цели.
Лучшим узлом-кандидатом является узел с наименьшим значением f. Каждый раз, когда мы достигаем нового узла, мы повторяем этот процесс, чтобы выбрать следующий узел-кандидат, всегда выбирает узел с наименьшим значением f, который мы еще не посетили. Это алгоритм A * . Он прокладывает путь, который неуклонно продвигается к цели.
6.5 A *
Теперь рассмотрим карту в реальном мире. Предположим, мы подъедем к перекрестку. Мы можем пойти прямо на шоссе, пойти направо или налево.Сначала мы превратим эту карту в граф с тремя узлами-кандидатами. Далее оцениваем наши варианты. На практике поворот на перекрестке требует больших усилий. Итак, мы присваиваем этому узлу более высокое значение g. Значение g — это стоимость перехода от начала до узла-кандидата.
Рассматривая вариант с шоссе, мы понимаем, что нам придется пройти долгий путь, чтобы съехать с шоссе, а затем вернуться обратно, чтобы достичь нашей цели. Итак, мы присваиваем этой опции более высокое значение h. Значение h — это оценочная стоимость, которую необходимо пройти от узла-кандидата до цели.Затем мы суммируем значения g и h, чтобы вычислить значения f для каждого узла. Мы видим, что наименьшее значение f фактически является узлом-кандидатом справа . Итак, это станет нашим следующим шагом.
Значение h — это оценочная стоимость, которую необходимо пройти от узла-кандидата до цели.Затем мы суммируем значения g и h, чтобы вычислить значения f для каждого узла. Мы видим, что наименьшее значение f фактически является узлом-кандидатом справа . Итак, это станет нашим следующим шагом.
6.6 От маршрута к траекториям
Маршрут карты высокого уровня — это только одна часть процесса планирования. Нам еще предстоит построить низкоуровневые траектории, чтобы двигаться по этому маршруту. Это означает работу с объектами, такими как другие автомобили, велосипеды или пешеходы, которые не являются частью карты. Например, нам может потребоваться взаимодействовать с автомобилем, который пытается развернуться перед нами, или мы можем захотеть обогнать медленную машину на шоссе. Эти сценарии требуют планирования более низкого уровня и большей точности. Мы называем этот уровень планирования траектории генерации .
6.7 Трехмерная траектория
Целью создания траектории является создание траектории, определяемой серией путевых точек. Каждой путевой точке мы назначаем отметку времени и скорость . И мы можем подогнать кривую к этим путевым точкам, чтобы создать геометрическое представление траектории. Поскольку движущиеся препятствия могут временно блокировать участки дороги, каждая путевая точка на траектории имеет отметку времени. Мы можем объединить отметку времени с выходными данными модуля прогнозирования, чтобы убедиться, что каждая путевая точка на траектории будет пустой в то время, когда мы планируем пройти через нее . Эти временные метки создают трехмерную траекторию, где каждая путевая точка определяется двумя измерениями в пространстве плюс третье измерение во времени. Мы также назначаем скорость для каждой путевой точки. Скорости гарантируют, что транспортное средство достигнет каждой путевой точки по расписанию.
6.8 Оценка траектории
Ограничения
Реальное планирование сталкивается с множественными ограничениями . Во-первых, траектория должна быть без столкновений, что означает, что на ней не должно быть препятствий. Второй , мы хотим, чтобы пассажиры чувствовали себя комфортно, поэтому переходы между путевыми точками и любые изменения скорости должны быть плавными. Третий , траектория должна быть физически жизнеспособной для транспортного средства. Например, автомобиль, движущийся на высокой скорости, не может мгновенно повернуть на 180 градусов. Мы не можем построить траекторию, включающую этот тип невозможного маневра. Наконец, , траектория должна быть законной.Нам необходимо знать правила дорожного движения на каждой путевой точке и следить за тем, чтобы траектория соответствовала этим законам.
Функция затрат
Между любыми двумя точками на дороге может быть несколько удобных, жизнеспособных и законных траекторий без столкновений. Как выбрать лучшую траекторию? Ответ — использовать функцию стоимости. Функция стоимости назначает стоимость каждой траектории. Выбираем траекторию с наименьшей стоимостью . Стоимость траектории складывается из различных штрафов .Например, стоимость может возрасти из-за отклонения от центра дороги или из-за потенциального столкновения или из-за превышения ограничения скорости , или если кривизна или ускорение траектории неудобны для пассажиров. Стоимость траектории объединяет все эти дефекты в одно число, что позволяет нам ранжировать разные траектории. Транспортное средство может даже использовать разные функции затрат для разных сред . Например, функция стоимости для шоссе может отличаться от функции стоимости для парковки.
6.9 Координаты Френе
Традиционно мы описываем положение объекта с помощью декартовых координат, но декартовы координаты не являются оптимальными для транспортного средства. Учитывая положение автомобиля по осям X и Y, если мы не знаем, где находится дорога, трудно определить, как далеко проехал автомобиль или отклонился ли он от центра полосы движения.
В качестве альтернативы декартовой системе координат используется система координат Френе. Координаты Френе d определяют положение автомобиля относительно дороги .В кадре Frenet S представляет собой расстояние вдоль дороги, также известное как продольная координата . D представляет собой смещение от продольной линии, также известное как поперечная координата . В каждой точке дороги поперечная и продольная оси перпендикулярны. Продольная координата говорит нам, как далеко мы проехали по дороге, а поперечная координата говорит нам, как далеко автомобиль отклоняется от центральной линии.
6.10 Планирование без привязки к траектории и скорости
Планирование с развязкой по траектории разделяет планирование траектории на два этапа: планирование траектории и планирование скорости .
Сначала на этапе планирования пути мы генерируем кривые-кандидаты, которые представляют собой пути, по которым может двигаться транспортное средство. Мы оцениваем каждый путь, используя функцию стоимости , которая включает плавность , безопасность, отклонение от центра полосы движения и любые другие факторы, которые мы хотим учесть. Мы ранжируем пути по стоимости и выбираем путь с наименьшей стоимостью.
Следующий шаг — определить, с какой скоростью двигаться по этому пути. Возможно, мы захотим изменить скорости на протяжении пути, поэтому нам действительно нужно выбрать последовательность скоростей, связанных с точками пути, а не одну скорость.Мы можем назвать эту последовательность профилем скорости . Мы можем использовать оптимизацию, чтобы выбрать хороший профиль скорости для пути с учетом различных ограничений. Траектория и профиль скорости вместе составляют траекторию для движения транспортного средства.
6.11 Создание и выбор пути
Чтобы сгенерировать возможные пути для планирования без привязки к скорости пути, мы начинаем с сегментации дороги на ячейки. Затем мы случайным образом выбираем точек из каждой из этих ячеек.Мы создаем путь-кандидат по , беря по одной точке из каждой ячейки и соединяя точки вместе. Путем повторения этого процесса мы можем построить несколько возможных путей. Мы оцениваем этих путей с помощью функции стоимости и выбираем путь с минимальной стоимостью.
Наша функция затрат может учитывать:
Отклонение от центра полосы движения.
Расстояние до препятствий.
Изменения скорости и кривизны.
Нагрузка на автомобиль.
Или любые другие факторы, которые мы хотим учесть.
6.12 График ST
Следующим шагом после выбора пути является выбор профиля скорости для связи с этим путем. Инструмент, называемый графиком ST, может помочь нам разработать и выбрать профиль скорости . На графике ST S представляет продольное смещение транспортного средства, а T представляет время. Кривая на графике ST — это описание движения транспортных средств, поскольку она показывает положение транспортных средств во времени.Скорость — это скорость, с которой изменяется положение, поэтому мы можем вывести скорость из графика ST, посмотрев на наклон кривой. Более крутой наклон указывает на большее движение за более короткий период времени, что соответствует более высокой скорости.
6.13 Профиль скорости
Для построения наилучшего профиля скорости мы можем разбить график ST на несколько ячеек. Скорость меняется между ячейками, но внутри каждой ячейки скорость остается постоянной. Этот подход упрощает построение профиля скорости при сохранении аппроксимации кривой.На графике ST препятствия можно нарисовать в виде прямоугольников , которые блокируют определенные участки дороги в определенные периоды времени. Например, предположим, что модуль прогнозирования прогнозирует, что автомобиль врезался в нашу полосу движения с момента T0 до T1. Поскольку эта машина будет занимать позиции от S0 до S1 в течение этого периода времени, мы рисуем прямоугольник на нашем графике ST, блокируя позиции от S0 до S1 в течение периода времени от T0 до T1. Во избежание столкновения наш профиль скорости не должен пересекать этот прямоугольник.
Теперь, когда у нас есть график ST с заблокированными различными ячейками, мы можем использовать механизм оптимизации, чтобы выбрать лучший профиль скорости для графика. Механизм оптимизации использует сложную математику для поиска недорогого решения с различными ограничениями. Эти ограничения могут включать правовые ограничения, такие как ограничения скорости, ограничения расстояния, такие как расстояние до препятствий, или физические ограничения автомобиля, такие как ограничения ускорения.
6.14 Оптимизация
Планирование без привязки к траектории и скорости сильно зависит от дискретизации. Выбор пути включает разделение дороги на ячейки, а построение профиля скорости включает разделение графика ST на ячейки. Дискретность упрощает решение этих проблем, но решения не являются гладкими.
Чтобы преобразовать наши дискретные решения в плавную траекторию, мы можем использовать метод, называемый квадратичным программированием. Квадратичное программирование подгоняет гладкую нелинейную кривую к этим кусочно-линейным сегментам . Математика, лежащая в основе квадратичного программирования, сложна, но для наших целей детали не нужны. Мы можем просто использовать один из нескольких различных пакетов оптимизации, включая реализацию Apollo, для получения гладких результатов.Как только наш путь и профиль скорости будут готовы, мы можем использовать их для построения трехмерной траектории.
6.15 Генерация траектории для планирования скорости по траектории
Давайте рассмотрим планирование без привязки по траектории от начала до конца. Представьте, что мы едем по дороге, и наша система восприятия замечает, что мы сокращаем разрыв на медленно движущемся транспортном средстве. Сначала мы генерируем несколько возможных путей вокруг этого транспортного средства . Мы оцениваем эти возможные пути, используя функцию стоимости , и выбираем путь с наименьшей стоимостью.Затем мы используем график ST для планирования скорости. Мы блокируем части графика ST в зависимости от положения других транспортных средств с течением времени. А механизм оптимизации помогает нам определить лучший профиль скорости для этого графика с учетом ограничений функции стоимости. Мы можем применить квадратичное программирование, чтобы сгладить траекторию и профиль скорости. Наконец, мы можем связать профиль пути и скорости вместе, чтобы построить траекторию. Здесь траектория красного цвета там, где скорость выше, и синего цвета, где скорость ниже.Мы используем эту траекторию, чтобы безопасно обогнать другое транспортное средство и продолжить наше путешествие.
6.16 Планирование решетки
Давайте рассмотрим подход создания траектории , который называется планированием решетки . Используя координаты Френе, мы можем проецировать окружающую среду на продольную и поперечную оси. Наша цель — создать траекторию в трех измерениях : , продольное измерение , поперечное измерение и временное измерение . Мы можем разделить трехмерную задачу на две отдельные двумерные задачи, разделив продольную и поперечную компоненты траектории.Одна двумерная траектория будет продольной траекторией с отметками времени . Мы называем это траекторией ST . Другой двумерной траекторией будет поперечное смещение относительно продольной траектории . Мы называем это траекторией SL .
Планирование решетки — это двухэтапный процесс, в котором сначала независимо развиваются траектории ST и SL, а затем они комбинируются. Чтобы сгенерировать двумерные продольные и поперечные траектории, мы начинаем с проецирования исходного состояния транспортного средства на систему координат ST и систему координат SL.Мы выбираем конечное состояние автомобиля, выбирая несколько возможных конечных состояний из предварительно выбранных шаблонов. Для каждого кандидата в конечное состояние мы строим набор траекторий для перехода нашего транспортного средства из исходного состояния в конечное состояние. Мы оцениваем эти траектории с помощью функции стоимости и выбираем траекторию функции с наименьшей стоимостью.
6.17 Конечные состояния для траекторий ST
В зависимости от ситуации мы можем выбрать конечных состояний из трех групп: крейсерская, следование и остановка .
Крейсерская означает, что наша машина будет двигаться с постоянной скоростью после этапа планирования. Помните, что мы отбираем точки на графике, где горизонтальная ось представляет время, а вертикальная ось представляет скорость. Для точки на этом графике это означает, что автомобиль войдет в крейсерский режим со скоростью с в момент времени t . Для этого шаблона ускорение для всех конечных состояний равно нулю.
Следующий шаблон, который следует рассмотреть. В этой ситуации мы выбираем и положение, и время, что означает, что мы попытаемся оказаться позади определенной машины в момент времени t . Чтобы следовать за этой машиной, нам нужно обеспечить безопасное расстояние, поэтому скорость и ускорение зависят от ведущей машины. Это означает, что в этом шаблоне и скорость, и ускорение являются фиксированными .
Конечное состояние — остановка . Для этого шаблона нам просто нужно выбрать, где и когда автомобиль остановится. В этом сценарии мы фиксируем и скорость, и ускорение равными нулю.
6.18 Конечные состояния для траекторий SL
Мы будем выполнять планирование SL на основе предположения о том, что автомобиль должен стабильно выровняться с центральной линией полосы независимо от того, в какое конечное состояние он войдет. Это означает, что нам нужно только выбрать боковые конечные позиции на небольшой площади. В частности, мы выбираем позиции вокруг центральных линий соседних полос на дороге. Для обеспечения устойчивости конечное положение движения автомобилей должно совпадать с центром полосы движения.Когда мы сопоставляем поперечное положение с продольным положением, предполагаемая траектория, которую мы хотим, должна заканчиваться так, чтобы транспортное средство было выровнено с полосой движения и двигалось прямо. Для достижения этого конечного состояния производные первого и второго порядка от заголовка и положения должны быть равны нулю. Это означает, что автомобиль не движется в поперечном направлении, что является производной первого порядка, и не ускоряется в поперечном направлении, что является производной второго порядка. Автомобиль просто едет прямо по полосе.
6,19 Полином
Подгонка полинома и оценка
Как мы соединяем начальное состояние и конечное состояние?
Мы подгоним полином к этим двум условиям. Здесь начальные и конечные условия — это кортежа с положением, скоростью и ускорением по s-координате . Обратите внимание, что скорость является производной первого порядка от положения, а ускорение — производной второго порядка от положения. Обычно мы обозначаем производную по времени точкой над переменной.
Теперь мы подставляем начальное условие и конечное условие, у нас есть 6 уравнений. Здесь мы предполагаем, что конечное условие наступает в момент времени t = T .
С помощью этих уравнений мы можем решить для a, b, c, d, e, и f . Это представляет собой кривую, которая плавно соединяет два условия.
6.20 Генерация траектории для планирования решетки
Когда у нас есть траектории ST и SL, нам нужно преобразовать их обратно в декартову систему координат.Затем мы можем объединить их, чтобы построить трехмерную траекторию, состоящую из двухмерных путевых точек и одномерных меток времени. Траектория ST — это продольное смещение во времени, а траектория SL — это поперечное смещение для каждой точки на продольной траектории. Поскольку обе траектории имеют продольную координату S, мы можем объединить траектории, сопоставив их по их значениям S.
6.21 Проект планирования пути от SDCND
Планирование — одна из самых сложных и сложных частей создания беспилотного автомобиля.Проект планирования из программы наноразработок для инженеров по самоуправляемым автомобилям предоставляет студентам симулятор шоссе и предлагает им создать планировщик для управления транспортным средством в условиях дорожного движения. Это забавный, реалистичный и действительно сложный проект, потому что вы должны предсказать, где будут другие транспортные средства на дороге в будущем, как вы должны на них реагировать и в конечном итоге построить траекторию движения транспортного средства. Модуль планирования в программе наноразмеров охватывает новый алгоритм, основанный на конечных автоматах.При таком подходе планировщик сначала выбирает такое поведение, как смена полосы движения, ускорение или замедление. Затем планировщик строит траекторию для выполнения этого поведения.
6.22 Резюме
В этом уроке мы исследуем, как беспилотный автомобиль планирует траекторию движения по миру. Автомобиль основывает этот план на данных из HD-карты, модулей восприятия и прогнозирования. Первый , мы представляем, как спланировать маршрут на уровне карты к нашему пункту назначения с помощью звезды. Затем , мы сосредоточились на построении траекторий без столкновений, которые шаг за шагом ведут нас к пунктам назначения.Мы узнали, как построить эти траектории, используя либо прошлое планирование без привязки к скоростям, либо решетчатое планирование. Сравнение этих двух подходов разовьет вашу интуицию в отношении планирования и выбора траекторий с использованием функций затрат. Планирование — одна из самых сложных частей при разработке автономного транспортного средства.
Произошла ошибка при настройке вашего пользовательского файла cookie
Произошла ошибка при настройке вашего пользовательского файла cookieЭтот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера на прием файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Произошла ошибка при установке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
.