Поворот с полосы для маршрутных транспортных средств: ПДД на автобусной полосе в 2022 году
Расположение транспортных средств на проезжей части
Расположение транспортных средств на проезжей части
п 9.1 ПДД Количество полос движения для безрельсовых транспортных средств определяется разметкой и (или) знаками 5.15.1, 5.15.2, 5.15.7, 5.15.8, а если их нет, то самими водителями с учетом ширины проезжей части, габаритов транспортных средств и необходимых интервалов между ними. При этом стороной, предназначенной для встречного движения на дорогах с двусторонним движением без разделительной полосы, считается половина ширины проезжей части, расположенная слева, не считая местных уширений проезжей части (переходно-скоростные полосы, дополнительные полосы на подъем, заездные карманы мест остановок маршрутных транспортных средств).
п 9.1(1) ПДД. На любых дорогах с двусторонним движением запрещается движение по полосе, предназначенной для встречного движения, если она отделена трамвайными путями, разделительной полосой, разметкой 1.
п 9.2 ПДД. На дорогах с двусторонним движением, имеющих четыре или более полосы, запрещается выезжать для обгона или объезда на полосу, предназначенную для встречного движения. На таких дорогах повороты налево или развороты могут выполняться на перекрестках и в других местах, где это не запрещено Правилами, знаками и (или) разметкой.
п 9.3 ПДД. На дорогах с двусторонним движением, имеющих три полосы, обозначенные разметкой (за исключением разметки 1.9), из которых средняя используется для движения в обоих направлениях, разрешается выезжать на эту полосу только для обгона, объезда, поворота налево или разворота. Выезжать на крайнюю левую полосу, предназначенную для встречного движения, запрещается.
п 9.4 ПДД. Вне населенных пунктов, а также в населенных пунктах на дорогах, обозначенных знаком 5.1 или 5.
В населенных пунктах с учетом требований настоящего пункта и пунктов 9.5, 16.1 и 24.2 Правил водители транспортных средств могут использовать наиболее удобную для них полосу движения. При интенсивном движении, когда все полосы движения заняты, менять полосу разрешается только для поворота налево или направо, разворота, остановки или объезда препятствия.
Однако на любых дорогах, имеющих для движения в данном направлении три полосы и более, занимать крайнюю левую полосу разрешается только при интенсивном движении, когда заняты другие полосы, а также для поворота налево или разворота, а грузовым автомобилям с разрешенной максимальной массой более 2,5 т — только для поворота налево или разворота. Выезд на левую полосу дорог с односторонним движением для остановки и стоянки осуществляется в соответствии с пунктом 12.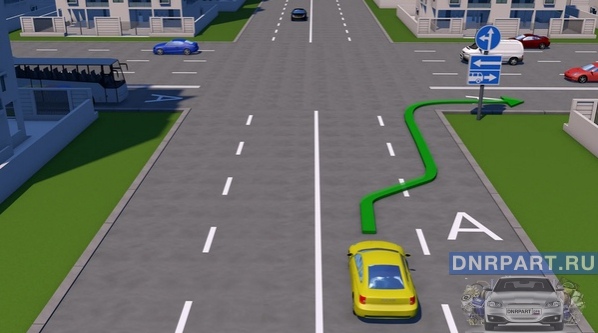
п 9.5 ПДД. Транспортные средства, скорость движения которых не должна превышать 40 км/ч или которые по техническим причинам не могут развивать такую скорость, должны двигаться по крайней правой полосе, кроме случаев объезда, обгона или перестроения перед поворотом налево разворотом или остановкой в разрешенных случаях на левой стороне дороги.
п 9.6 ПДД. Разрешается движение по трамвайным путям попутного направления, расположенным слева на одном уровне с проезжей частью, когда заняты все полосы данного направления, а также при объезде, повороте налево или развороте с учетом пункта 8.5 Правил. При этом не должно создаваться помех трамваю. Выезжать на трамвайные пути встречного направления запрещается. Если перед перекрестком установлены дорожные знаки 5.15.1 или 5.15.2, движение по трамвайным путям через перекресток запрещается.
п 9.7 ПДД. Если проезжая часть разделена на полосы линиями разметки, движение транспортных средств должно осуществляться строго по обозначенным полосам.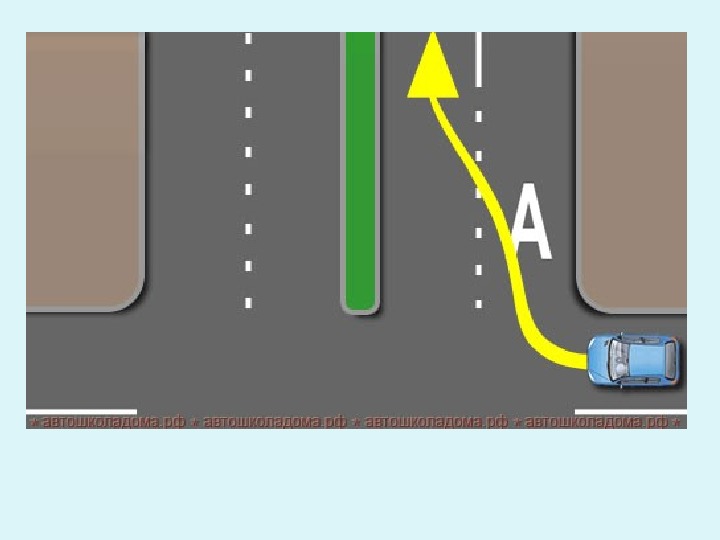 Наезжать на прерывистые линии разметки разрешается лишь при перестроении.
Наезжать на прерывистые линии разметки разрешается лишь при перестроении.
п 9.8 ПДД. При повороте на дорогу с реверсивным движением водитель должен вести транспортное средство таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство заняло крайнюю правую полосу. Перестроение разрешается только после того, как водитель убедится, что движение в данном направлении разрешается и по другим полосам.
п 9.9 ПДД. Запрещается движение транспортных средств по разделительным полосам и обочинам, тротуарам и пешеходным дорожкам (за исключением случаев, предусмотренных пунктами 12.1, 24.2 — 24.4, 24.7, 25.2 Правил), а также движение механических транспортных средств (кроме мопедов) по полосам для велосипедистов. Запрещается движение механических транспортных средств по велосипедным и велопешеходным дорожкам. Допускается движение машин дорожно-эксплуатационных и коммунальных служб, а также подъезд по кратчайшему пути транспортных средств, подвозящих грузы к торговым и другим предприятиям и объектам, расположенным непосредственно у обочин, тротуаров или пешеходных дорожек, при отсутствии других возможностей подъезда. При этом должна быть обеспечена безопасность движения.
При этом должна быть обеспечена безопасность движения.
п 9.10 ПДД. Водитель должен соблюдать такую дистанцию до движущегося впереди транспортного средства, которая позволила бы избежать столкновения, а также необходимый боковой интервал, обеспечивающий безопасность движения.
п 9.11 ПДД. Вне населенных пунктов на дорогах с двусторонним движением, имеющих две полосы, водитель транспортного средства, для которого установлено ограничение скорости, а также водитель транспортного средства (состава транспортных средств) длиной более 7 м должен поддерживать между своим и движущимся впереди транспортным средством такую дистанцию, чтобы обгоняющие его транспортные средства могли без помех перестроиться на ранее занимаемую ими полосу. Это требование не действует при движении по участкам дорог, на которых запрещается обгон, а также при интенсивном движении и движении в организованной транспортной колонне.
п 9.12 ПДД. На дорогах с двусторонним движением при отсутствии разделительной полосы островки безопасности, тумбы и элементы дорожных сооружений (опоры мостов, путепроводов и тому подобное), находящиеся на середине проезжей части, водитель должен объезжать справа, если знаки и разметка не предписывают иное.
Комментарий к Разделу 9 Правил дорожного движения РФ
9.1.
Когда разметка на дороге отсутствует, или же, если она не видна (снег, лед и т.д.), водители должны самостоятельно определять количество полос движения и их ширину.
Пункт 9.1 (1) введен в ПДД 12 июля 2017 года. В этом пункте пдд определены условия, при которых запрещается выезд на встречную полосу. Визуально это сплошная (двойная сплошная) линия разметки, отделяющая встречный поток машин, разделительная полоса (имеется в виду полоса, обозначенная разметкой 1.2) и трамвайные пути, расположенные в одной плоскости с проезжей частью (движение по трамвайным путям осуществляется с учетом пункта 9.6, выезд на встречные трамвайные пути запрещен).
9.2.
Если проезжая часть имеет четыре полосы и более, между встречными потоками транспортных средств должна быть нанесена двойная сплошная линия разметки 1. 3 или сделана разделительная полоса. При отсутствии разметки или если она не видна, водитель должен сам определить количество полос на дороге, руководствуясь п.9.1, в случае, если их больше трех, выезжать за середину дороги нельзя.
3 или сделана разделительная полоса. При отсутствии разметки или если она не видна, водитель должен сам определить количество полос на дороге, руководствуясь п.9.1, в случае, если их больше трех, выезжать за середину дороги нельзя.
9.3.
На рассматриваемых дорогах крайние полосы предназначены только для движения в одном направлении. Встречный транспорт на них не допускается, несмотря на то, что они выделены прерывистой линией разметки 1.5 .
Использовать среднюю полосу для постоянного движения нельзя, так как на нее разрешено выезжать водителям, движущимся в противоположных направлениях. На среднюю полосу разрешено въезжать только с определенной целью: для обгона, объезда, поворота налево, разворота.
9.4.
Данный пункт ПДД обязывает водителей в указанных в нем ситуациях вне населенного пункта двигаться по возможности правее, т.е. если правая полоса свободна, то следует двигаться только по ней, не занимая левые полосы.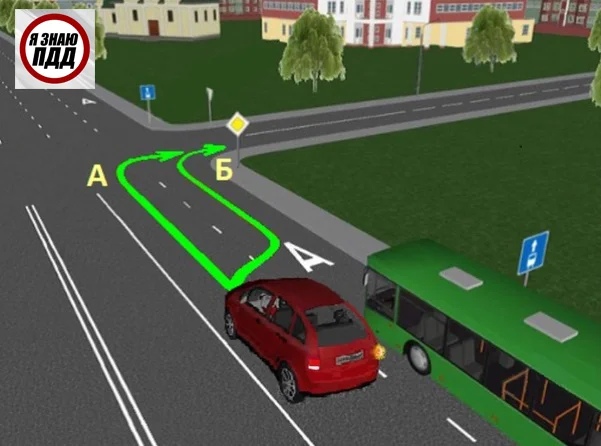
Левые полосы должны быть свободны для возможности совершения разворота и левого поворота транспортных средств, а также для пропуска автомобилей оперативных служб, двигающихся с повышенной скоростью.
9.5.
Требование данного пункта обязательно для выполнения независимо от того, что является причиной движения транспортных средств со скоростью, не превышающей 40км/ч (особенности конструкции, техническое состояние или особые свойства перевозимого груза).
9.6.9.7.
Езда по линиям разметки дезорганизует движение, так как другие водители могут решить, что вы собираетесь перестроиться в другой ряд. Наезд на линию продольной разметки в непогоду, например во время дождя, опасен еще и тем, что при разных коэффициентах сцепления покрытия и материала разметки (краска, пластические материалы) возможен занос автомобиля.
9.8.
Въезжая (поворачивая) на дорогу с реверсивным движением, следует занять крайнюю правую полосу независимо от того в какую сторону на перекрестке (влево иди вправо) осуществляется поворот.
9.9.
Водитель специального транспорта, находясь в вышеуказанных разрешенных случаях на тротуаре, обочине или пешеходной дорожке, обязан помнить, что преимущество в движении в этой ситуации принадлежит пешеходам.
9.10.
В ПДД под дистанцией между автомобилями понимается расстояние между ТС, движущимися друг за другом по одной полосе. Правила не указывают точную величину безопасной дистанции, так как она зависит от технического состояния автомобиля, состояния дорожного покрытия, погодных условий и т. д. При движении в плотном транспортном потоке необходимо прогнозировать возможное экстренное торможение движущегося впереди транспорта и обращать внимание на тех, кто движется сзади.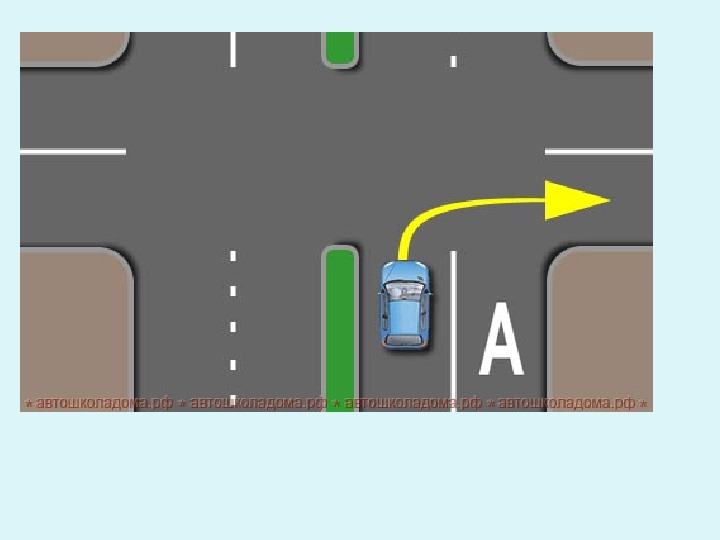
Условно принято считать, что водитель при движении должен держать дистанцию (в метрах), равную не меньше половины значения скорости (в км/ч). Т.е. при скорости движения 60км/ч. считается безопасной дистанция около 30м, при 90км/ч. — около 45м и т.д.
Поскольку глазомер у всех людей разный, чтобы не путаться в метрах, дистанцию удобнее измерять в секундах. Почему так лучше и как это осуществить, есть ответ в статье Движение в потоке.
Боковой интервал – расстояние между бортами ТС, движущихся как попутно, так и навстречу друг другу. Безопасный боковой интервал выбирается в зависимости от скорости движения и ширины автомобиля. В любом случае он должен быть не меньше 0,5м (значение условное) между попутными ТС при их движении с одинаковыми скоростями.
9.11.
Водители тихоходных и длинных ТС обязаны внимательно следить за дорожной обстановкой не только впереди и со стороны своих бортов, но и сзади, чтобы своевременно дать возможность обгоняющим вернуться на свою полосу движения.
При движении тихоходных и длинных ТС в организованной транспортной колонне и при высокой интенсивности движения, их водители могут не соблюдать требования данного пункта Правил, поскольку в этих условиях обгоны невозможны.
9.12.
Это требование ввели с целью предотвратить выезд ТС, выполняющих объезд препятствия, на сторону встречного движения. Объезжать указанные элементы дорожных сооружений слева разрешено только тогда, когда это предписывают дорожные знаки (4.2.2 «Объезд препятствия слева» или 4.2.3 «Объезд препятствия справа или слева») или соответствующая разметка.
Учитывать ли полосу для МТС в целях применения нормы п. 9.4 ПДД?
Пункт 9.4 Правил дорожного движения давно вызывает ряд вопросов как у пользователей дороги, так и правоприменителей. Одним из таковых является вопрос об относимости полосы для МТС (не отделённой разделительной полосой, естественно) к требованиям указанной нормы.
Приведём содержание абз. 3 п. 9.4 Правил дорожного движения:
3 п. 9.4 Правил дорожного движения:
Однако на любых дорогах, имеющих для движения в данном направлении три полосы и более, занимать крайнюю левую полосу разрешается только при интенсивном движении, когда заняты другие полосы, а также для поворота налево или разворота, а грузовым автомобилям с разрешенной максимальной массой более 2,5 т — только для поворота налево или разворота.
Из буквального, текстуального выражения указанного пункта следует, что полоса для маршрутных транспортных средств (МТС) этой нормой учитывается. В таком случае, например, на представленном ниже фото легковые автомобили в крайней левой полосе (в попутном направлении) — нарушители (абз. 3 п. 9.4 Правил).
Исследуем матчасть.
В СП 396.1325800.2018 «Улицы и дороги населенных пунктов. Правила градостроительного проектирования» выделенная полоса движения для наземного пассажирского транспорта общего пользования определена как полоса движения на основной проезжей части, выделенная разметкой или конструктивно и предназначенная исключительно для движения наземного пассажирского транспорта общего пользования (п. 3.1.2 СП).
3.1.2 СП).
При необходимости допускается устраивать обособление выделенных полос движения с применением ограждений гибких конструкций и/или делиниаторов (п. 6.8 СП).
Выделенные полосы движения для НПТОП целесообразно устраивать на улицах и дорогах общегородского значения с количеством полос движения транспорта 3 и более в одном направлении. На магистральных улицах с односторонним движением допускается устраивать выделенную полосу для НПТОП с организацией движения навстречу общему потоку транспортных средств (п. 6.8а СП).
Здесь уместно «подгрузить» п. «f» ст. 1 Конвенции о дорожном движении: «на проезжей части, где крайняя полоса или крайние полосы движения или велодорожки предназначены для движения определенных транспортных средств, термин «край проезжей части» означает для других пользователей дороги край остальной части дороги.»
Отдельно остановлюсь на Постановлении Правительства г. Москвы от 27 сентября 2011 года N 453-ПП «Об организации выделенных полос для движения маршрутных транспортных средств».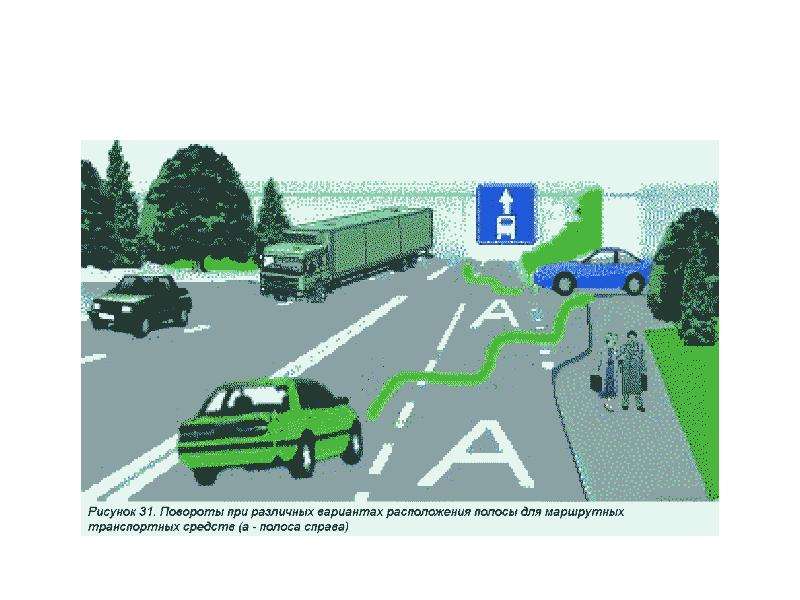
Согласно п.1.2 Приложения 2 указанного Постановления:
«Выделенная полоса для движения маршрутных транспортных средств» (далее — выделенная полоса) – участок дороги, предназначенный для движения маршрутных транспортных средств, обозначенный соответствующими техническими средствами организации дорожного движения (дорожные знаки, дорожная разметка) в соответствии с ГОСТ Р 52289-2004 «Технические средства организации дорожного движения».
Таким образом, полоса для МТС есть отдельный участок дороги с особым правовым режимом (п. 18.2 ПДД), собственной инфраструктурой (и весьма разветвлённой).
Участки дороги неоднократно упоминаются в ГОСТах относительно реверсивных полос, дорог с односторонним движением, УДС и др., но отождествлять природу данных участков дороги с участком, отведённым под полосу для МТС – методологически неверно, и в контексте рассматриваемого вопроса — иррелевантно.
Согласно п. 1.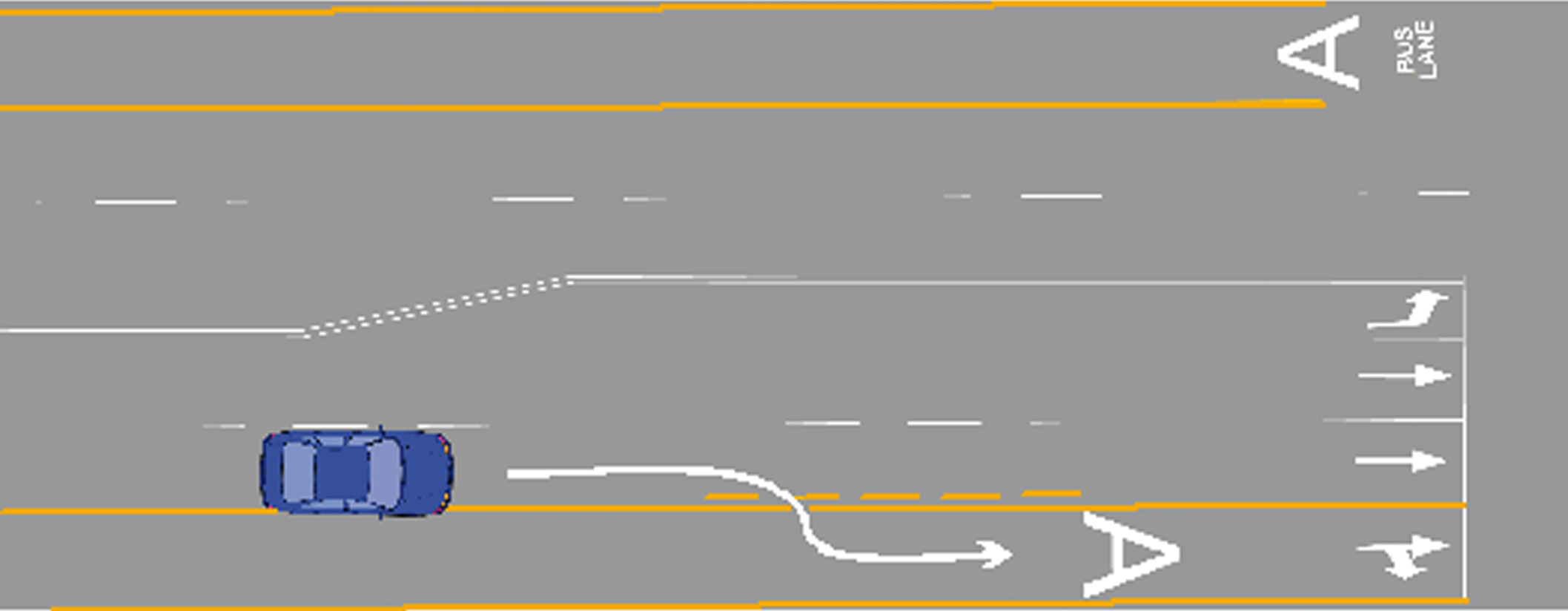 3 Приложения 2 к постановлению Правительства Москвы от 27 сентября 2011 года N 453-ПП инфраструктура выделенной полосы может включать в себя:
3 Приложения 2 к постановлению Правительства Москвы от 27 сентября 2011 года N 453-ПП инфраструктура выделенной полосы может включать в себя:
1) дорожную разметку;
2) дорожные знаки и информационные щиты;
3) заездные карманы на остановочных пунктах с удлинением посадочных площадок;
4) специальные технические средства фото- и видеофиксации административных правонарушений, интегрируемые в интеллектуальную транспортную систему;
5) отстойно-разворотные площадки (ОРП), предназначенные для скоростных автобусных систем (САС) и находящиеся в непосредственной близости от выделенной полосы в местах окончания трассы маршрута САС.
6) конечные станции;
7) перехватывающие парковки.
Как видим, полосу для МТС отличает от иных участков дороги суверенный правовой режим, технологическое обустройство и разветвлённая инфраструктура, несвойственные для иных, ординарных полос движения.
СП 396.1325800.2018 и Регламент создания и эксплуатации выделенных полос для движения маршрутных транспортных средств логически «выводят» полосу для МТС в отдельный участок дороги и, соответственно, данная полоса для целей п. 9.4 ПДД объективно не учитывается.
9.4 ПДД объективно не учитывается.
Да, постановление Правительства Москвы от 27 сентября 2011 года N 453-ПП есть НПА отдельного субъекта РФ, но данное постановление, в том числе, взял бы за основу при разработке нормативной базы о проектировании полос для МТС иными субъектами РФ.
Таким образом, формализм и буквализм в толковании исследуемого пункта ведут в тупик, порождают очевидную бессмыслицу и неопределённость.
Содержание нормы п. 9.4 уже её текстуального выражения. Пункт 9.4 ПДД следует толковать ограничительно, с учётом п. f ст. 1 Конвенции о дорожном движении.
То есть — необходима телеологическая редукция гипотезы нормы.
Исходя из доктрины приоритета содержания над формой, полоса для МТС, являющаяся полосой движения со специальным (особым) правовым режимом, не подпадает под юрисдикцию п. 9.4 ПДД.
Объективно выведены из-под требований указанного пункта Правил и те привилегированные участники дорожного движения, которым разрешено занимать полосу для МТС (п. 18.2 ПДД).
18.2 ПДД).
Иначе данная правовая конструкция обессмысливает практически любую организацию движения с выделенными полосами.
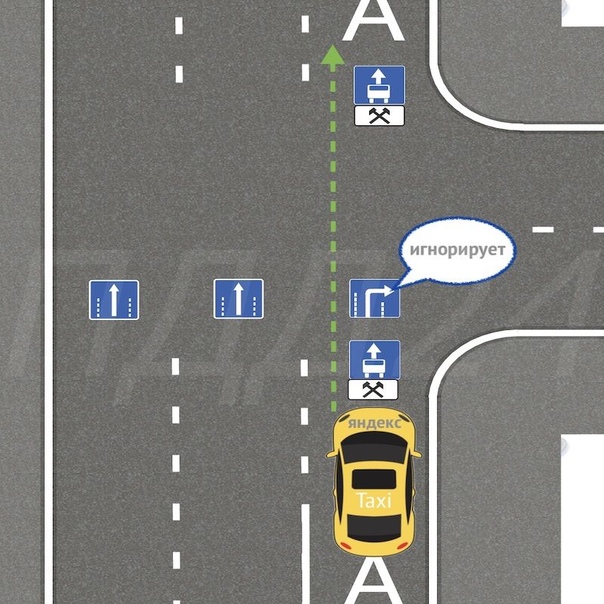
Например, водитель легкового такси (или школьного автобуса) на четырехполосной дороге (в данном направлении) при наличии крайней левой полосы для МТС имеет право осуществлять движение по выделенной полосе и при условии свободных правых, ординарных полос движения.
И трёхполосная версия.
Приведённые доводы соответствуют принципу lex specialis derogat generali, т.е. в условиях коллизии п.п. 9.4 и 18.2 ПДД — «перевес» в пользу п. 18.2.
При проектировании полос для МТС целесообразно отделять полосу для маршрутных транспортных средств от общего потока транспортных средств разделительной полосой, выделенной линиями разметки 1.2 и 1.16.1 или 1.16.2.
Согласно п. 6.2.4 ГОСТ Р 52289-2019 разметку 1.2 допускается применять для обозначения разделительной полосы шириной не менее 0,5 м, предназначенной для отделения полосы для велосипедистов или полосы для маршрутных транспортных средств от общего потока транспортных средств.
Разметку 1.16.1 допускается применять для обозначения разделительной полосы, предназначенной для отделения полосы для велосипедистов или полосы для маршрутных транспортных средств от общего потока встречных транспортных средств, 1.16.2 — попутных транспортных средств или парковки (п. 6.2.19 ГОСТ Р 52289-2019).
Фото: https://gre4ark.livejournal.com
Таким образом, полоса для МТС, являющаяся полосой движения с автономным правовым режимом, объективно выведена из-под юрисдикции п. 9.4 ПДД. В арсенале же действующих ГОСТов содержатся все необходимые технические средства организации движения, применение которых исключает подобные коллизии.
кто нарушает правила, заезжая на полосу для общественного транспорта
Сотрудники Госавтоинспекции проверили, кто из водителей мешает движению общественного транспорта, передает корреспондент агентства «Минск-Новости».
Рейд 12 сентября организовали на пр. Независимости недалеко от здания цирка. Вместе с инспекторами возле магистрали дежурили представители ГУ «Столичный транспорт и связь» и СЗАО «Безопасные дороги Беларуси».
Независимости недалеко от здания цирка. Вместе с инспекторами возле магистрали дежурили представители ГУ «Столичный транспорт и связь» и СЗАО «Безопасные дороги Беларуси».
— Рейд проводим в рамках пилотного проекта «Фотофиксация нарушений Правил дорожного движения по полосе для маршрутных транспортных средств», — объясняет начальник сектора диспетчерского управления ГУ «Столичный транспорт и связь» Александр Пылаев. — В районе остановочного пункта рядом с Центральным Домом офицеров на опоре размещена видеокамера. Прибор фиксирует все автомобили, которые в нарушение правил движутся в первой полосе. Она обозначена крупной литерой «А». Изображение транспортного средства вместе с регистрационным знаком в режиме реального времени передается с камеры к нам на ноутбук. По прошествии нескольких минут инспекторы ГАИ останавливают нарушителя и привлекают к административной ответственности.
Первым был остановлен автомобиль такси. Водитель на замечание сотрудников милиции лишь пожал плечами, мол, не знал, что в спецполосу нельзя беспричинно заезжать. За что и понес наказание. Согласно ст. 18.14.6 КоАП Республики Беларусь, на первый раз штраф может составить от 1 до 5 базовых величин, в случае повторного такого нарушения правил в течение года — от 2 до 8 базовых.
За что и понес наказание. Согласно ст. 18.14.6 КоАП Республики Беларусь, на первый раз штраф может составить от 1 до 5 базовых величин, в случае повторного такого нарушения правил в течение года — от 2 до 8 базовых.
Второй нарушитель также оказался таксистом. При разбирательстве выяснилось, что мужчина вообще не имеет права ездить за рулем и тем более перевозить пассажиров, поскольку по решению суда на него наложено ограничение права управления транспортным средством на 5 лет.
— Мы выступаем за беспрепятственное движение автобусов по установленным маршрутам, — говорит Александр Пылаев. — В этом случае увеличится скорость сообщения, соответственно сократится интервал движения, станет комфортней пассажирам. Такие полосы выделены не только на пр. Независимости, но и на пр. Дзержинского, ул. Ташкентской, ул. Маяковского, ул. Немиге. Выделена полоса для поворота налево с ул. М. Богдановича на пр. Машерова для автобусов, которые следуют по маршрутам № 18, 26 и 39.
— В августе мы проводили такой рейд, — рассказывает начальник отдела агитации и пропаганды ГАИ ГУВД Мингорисполкома Сергей Зараник. — В направлении ул. Я. Купалы только за один будний день зафиксировано около 900 нарушений правил, в направлении ул. Энгельса — 1 600. Автолюбителям тогда много рассказывали, что нужно уважать труд водителей общественного транспорта, не занимать обозначенные полосы, показали нарушителям, где установлены камеры, в каких местах нужно перестраиваться. Но количество нарушений с того времени не уменьшилось. Тем временем водители, занятые перевозкой пассажиров, часто жалуются на автомобилистов, которые подрезают автобус или троллейбус, опасно маневрируют, высаживают пассажиров в запрещенных местах. При этом создаются аварийные ситуации. При резком торможении в салоне возможно падение пассажиров. И мы вынуждены реагировать. Контроль ГАИ будет продолжаться.
Справочно
Согласно ПДД, на дорогах с полосой движения для маршрутных транспортных средств, обозначенных дорожными знаками «Полоса для маршрутных транспортных средств», «Дорога с полосой для маршрутных транспортных средств», запрещаются движение, остановка и стоянка других транспортных средств на этой полосе.
Фото автора и СЗАО «Безопасные дороги Беларуси»
Автоматизированная информационная система «ДомУчет», которая сейчас внедрена в Заводском районе столицы, до конца 2022 г. может быть распространена на все остальные районы города. Об этом в эфире программы «Говорит и показывает Минск» на «Радио Минск» сообщил заместитель директора КУП «Центр информационных технологий Мингорисполкома» Александр Василенко, сообщает корреспондент агентства «Минск-Новости».
АИС «ДомУчет» позволяет предприятиям ЖКХ инвентаризировать все обслуживаемые дома, составлять графики для работников, рассчитывать объемы работ, планировать финансирование на работу ЖКХ, объемы работ, а следовательно, и повышать качество оказания услуг. Но в Центре информационных технологий на этом не останавливаются.
Но в Центре информационных технологий на этом не останавливаются.
По словам гостя программы, разрабатывается отраслевая цифровая платформа — комплексная система «Жилищное коммунальное хозяйство», куда включается и интегрируется в единое решение ряд продуктов и информационных систем, созданных Центром.
— В нее включены сервис 115, экологическая карта Минска, карта энергоэффективности, АИС «ДомУчет», — уточнил собеседник.
Картографический сервис «Карта энергоэффективности Минска» также планируют дорабатывать. На данный момент выполнен первый этап реализации этого проекта – визуализация, изображение на карте домов и класса энергоэффективности каждого из них. Можно увидеть, к какому классу отнесен конкретный дом, настроить фильтр, благодаря которому будут отображаться определенные постройки. Для властей и предприятий ЖКХ это дает возможность планировать свою работу, принимать в отношении жилья те или иные решения. Жители также могут посмотреть, к какому классу энергоэффективности относится их дом.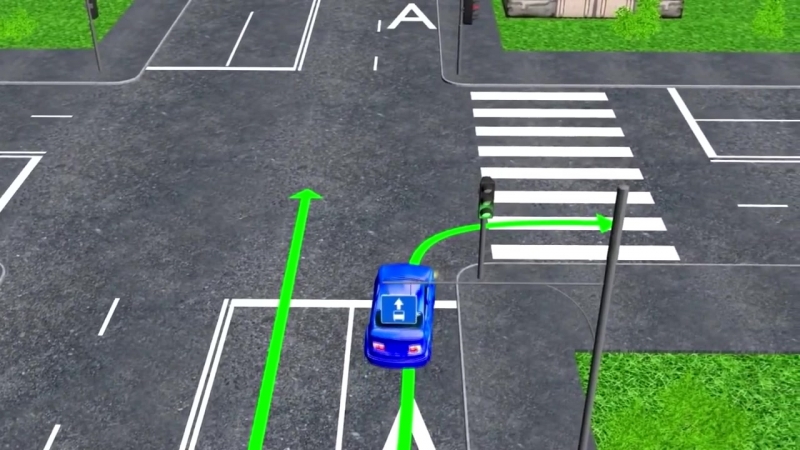
— Дальнейшее развитие этого сервиса будет заключаться в том, что гражданин, найдя свой дом на карте, сможет посмотреть, сколько будет стоить его утеплить и какая лепта потребуется от конкретной квартиры. Соответственно, будет предоставляться информация о стоимости отопления для квартиры до и после тепловой модернизации, — поделился планами А. Василенко.
Что касается экологической карты Минска, которую также разработал ЦИТ, там можно посмотреть любую информацию о сборе бытовых отходов в столице: расположение контейнеров, маршруты вывоза мусора и другое. Все это уже сейчас доступно на странице http://ecomap.it-minsk.by/.
Опубликовано: 14.01.2022
В воскресенье, 16 января, гостем программы Виктора Бабарикина «Вечер в мажоре» на «Радио-Минск» станет основатель арт-группы «Беларусы», органист, автор песен для «Евровидения» Валерий Шмат, сообщает корреспондент агентства «Минск-Новости».
Очень быстро «Беларусам» удалось обрести статус коллектива с широчайшим репертуаром и огромной зрительской аудиторией. За плечами артистов — тысячи сольных концертов и участие в престижнейших музыкальных фестивалях и проектах нашей страны и зарубежья, таких как «Славянский базар», «Золотая коллекция белорусской песни», «Мисс Беларусь», «Площадь Победы», «Дожинки», «Фестиваль национальных культур», «Серебряный граммофон», «Звездный ринг», «Хорошоу», «День Независимости» и многих других.
Группа является участником приемов Президента Беларуси, Европейских игр, Рождественских турниров и многих других престижных мероприятий. Приемы от имени чрезвычайных послов Беларуси в разных странах зачастую открываются выступлением именно этого коллектива. С большим успехом проходят их концерты как на Красной площади в Москве, так и в старинных залах городов Литвы, Латвии, Эстонии.
Приемы от имени чрезвычайных послов Беларуси в разных странах зачастую открываются выступлением именно этого коллектива. С большим успехом проходят их концерты как на Красной площади в Москве, так и в старинных залах городов Литвы, Латвии, Эстонии.
За плечами В. Шмата — Белорусская академия музыки по классам «Хоровое дирижирование» и «Орган». Большинство вокальных аранжировок, как и основные авторские произведения «Беларусов», — его рук дело. Кроме того, Валерий часто гастролирует в стране и за рубежом в амплуа органиста. Его органные концерты — настоящее откровение для зрителей.
В. Шмат много пишет для детей и молодежи. Его песни звучат на таких престижных конкурсах, как «Евровидение», «Новая волна», «Славянский базар» и др. Написанные им мюзиклы ставятся на республиканских сценах.В группе В. Шмат исполняет партию баритона. В репертуаре коллектива наряду с белорусской и русской песней звучат завораживающие Bessame mucho и Luna, страстное «Аргентинское танго» и романтичный «Вальс под небом Парижа», чарующие мелодии Фрэнка Синатры, классические произведения Моцарта, а также зажигательные рок-н-роллы и русско-цыганские романсы, любимые композиции из старого доброго советского кино.
В 2019 г. В. Шмат получил высшую награду Министерства культуры Республики Беларусь — нагрудный знак «За вклад в культуру Беларуси».
Напоминаем, что в конце программы «Вечер в мажоре» прозвучит рубрика-конкурс «Семь нот», где необходимо угадать название мелодии. Тот, кто пришлет правильный SMS-ответ на номер 9240, получит пригласительные билеты в Белгосфилармонию на концерт «Шедевры мирового органного искусства», который состоится 22 января. Исполнители — лауреаты международных конкурсов Екатерина Николаева (орган), Юлия Переу (фортепиано), музыковед — кандидат искусствоведения Ольга Савицкая.
Программа «Вечер в мажоре» выйдет в эфир в воскресенье, 16 января, в 19:00 (повтор программы — 20 января в 22:00) на «Радио Минск»: Минск — 92,4 FM, Брест — 100,4 FM, Витебск — 106,4 FM, Могилев — 98,1 FM и Гомель — 105,6 FM. Доступен также плеер «Радио-Минск» на портале minsknews.by.
Смотрите также:
Опубликовано: 14.01.2022
Опубликовано: 14.01.2022
В контакт-центре ЖКХ Минска могут внедрить электронного помощника для приема заявок от горожан. Об этом в эфире программы «Говорит и показывает Минск» на «Радио Минск» рассказал заместитель директора КУП «Центр информационных технологий Мингорисполкома» Александр Василенко, сообщает корреспондент агентства «Минск-Новости».
— Контакт-центр ЖКХ — это посредник между гражданином, у которого возникла проблема, и исполнителем, который будет эту проблему решать. Мы представляем сервис, с помощью которого можно оставить заявку: по телефону, через сайт или мобильное приложение. Наши люди контролируют выполнение заявок. Интересуются, удовлетворен ли качеством работ заявитель. Ежедневно на 115 поступает порядка 7 тыс. заявок. И мы заинтересованы в том, чтобы граждане не ожидали долго ответа на свой звонок. Прорабатываем вопрос по использованию роботизированного информационного помощника. Речь идет о технологиях искусственного интеллекта, которые позволяют принять звонок от гражданина. Все слова будут распознаны системой, по ключевым фразам определена та или иная проблема из классификатора, в котором насчитывается 325 видов неисправностей. Система сама определит исполнителя, сформирует заявку и выставит сроки исполнения. Если есть информация об отключениях тех или иных услуг по конкретному адресу, эти сведения также могут быть предоставлены заявителю, — объяснил гость программы.
Мы представляем сервис, с помощью которого можно оставить заявку: по телефону, через сайт или мобильное приложение. Наши люди контролируют выполнение заявок. Интересуются, удовлетворен ли качеством работ заявитель. Ежедневно на 115 поступает порядка 7 тыс. заявок. И мы заинтересованы в том, чтобы граждане не ожидали долго ответа на свой звонок. Прорабатываем вопрос по использованию роботизированного информационного помощника. Речь идет о технологиях искусственного интеллекта, которые позволяют принять звонок от гражданина. Все слова будут распознаны системой, по ключевым фразам определена та или иная проблема из классификатора, в котором насчитывается 325 видов неисправностей. Система сама определит исполнителя, сформирует заявку и выставит сроки исполнения. Если есть информация об отключениях тех или иных услуг по конкретному адресу, эти сведения также могут быть предоставлены заявителю, — объяснил гость программы.
Он добавил, что это позволит обеспечить свободную линию, если человеку все равно необходимо связаться с диспетчером. Информационный помощник, способный принять заявку, разгрузит диспетчеров и поможет принимать больше заявок.
Информационный помощник, способный принять заявку, разгрузит диспетчеров и поможет принимать больше заявок.
Опубликовано: 14.01.2022
Изменения и дополнения Конституции обсуждались в рамках диалоговой площадки с руководителями учреждений культуры столицы и идеологическим активом в кинотеатре «Центральный», сообщили корреспонденту агентства «Минск-Новости» в управлении культуры Мингорисполкома.
В мероприятии приняли участие начальник управления культуры Мингорисполкома Виталий Брель, председатель республиканского государственно-общественного объединения «Белорусское общество «Знание» Вадим Гигин, а также представители руководства учреждений культуры, подведомственных управлению культуры Мингорисполкома.В ходе работы диалоговой площадки В. Брель проинформировал собравшихся о новшествах, предложенных для внесения в Основной Закон страны, подчеркнув, что проект не окончателен, и управление культуры ждет от всех учреждений широкого обсуждения документа в организациях для дальнейшего изучения каждого предложения.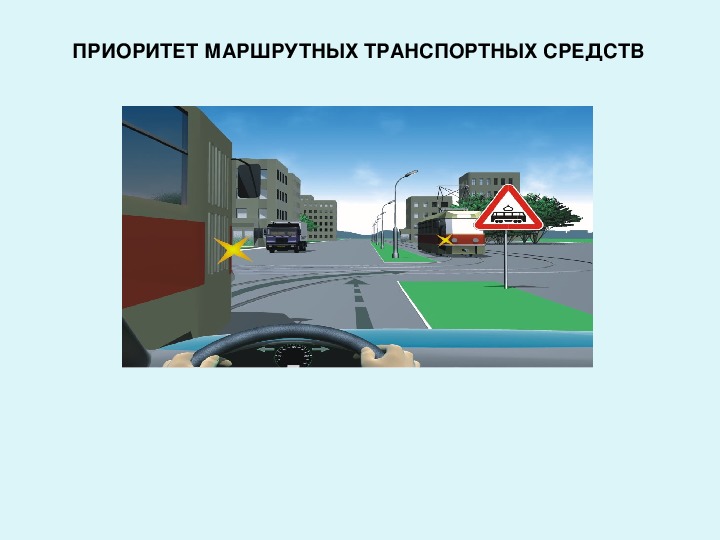 Важно дойти до каждого и услышать мнение каждого работника сферы культуры города.
Важно дойти до каждого и услышать мнение каждого работника сферы культуры города.
В. Гигин в ходе выступления, говоря об облике проекта обновленной Конституции, отметил:
— Главная тенденция — это усиление народовластия. Появляется орган — Всебелорусское народное собрание. Это высший орган народовластия.
Он также отметил, что республика остается президентской, что немаловажно. При этом усиливаются контрольные функции парламента. Граждане получают возможность обращаться в Конституционный суд. Таким образом усиливается прямая связь между гражданами, народом как источником власти и самими властными институтами.В. Гигин отметил, что после событий августа 2020 года в обществе произошла мобилизация патриотических сил. Народ почувствовал ответственность за свою страну. По его мнению, возможность принять участие во всенародном обсуждении Конституции, а затем в референдуме — это как раз и есть гражданский долг.
Фото предоставлены управлением культуры Мингорисполкома
Смотрите также:
Опубликовано: 14.01.2022
В Минске с 12:00 14 января наблюдалось усиление ветра до 25 м/с, в результате непогоды зафиксированы падение различных конструкций и деревьев, в том числе на автомобили, а также элементов кровли, сообщили корреспонденту агентства «Минск-Новости» в Минском городском управлении МЧС.
 По состоянию на 14:30 спасатели в 10 случаях выезжали для распилки упавших деревьев, в 16 случаях — для демонтажа аварийных листов жести, а также для демонтажа четырех билбордов, одной оконной рамы, кровли остановочного пункта, беседки на детской площадке и одного плафона подсветки здания.Ленинский район
По состоянию на 14:30 спасатели в 10 случаях выезжали для распилки упавших деревьев, в 16 случаях — для демонтажа аварийных листов жести, а также для демонтажа четырех билбордов, одной оконной рамы, кровли остановочного пункта, беседки на детской площадке и одного плафона подсветки здания.Ленинский районНа пр. Рокоссовского, 12, к. 1, потребовался демонтаж оконной рамы, на ул. Революционной и Маяковского, 16, — демонтаж аварийных листов жести.
Фрунзенский районНа ул. Казимировской напротив дома № 6 и на ул. Одинцова напротив дома № 36 требовалась помощь по демонтажу билборда. Распиливали деревья на ул. Жудро напротив дома № 26, ул. Притыцкого, 40, и ул. Берута, 8. На ул. Тимошенко демонтировали поврежденную кровлю остановочного пункта, а по следующим адресам потребовался монтаж аварийных листов жести: ул. Кунцевщина, 23 (напротив), ул. Бельского, 62, и ул. Матусевича, 24.
Заводской районАварийные деревья требовалось распилить в районе дома № 40 на ул. Павловского, дома № 38 на ул. Васнецова и на ул. Авангардной, 50. В доме № 2 на ул. Голодеда демонтировали аварийный лист жести.Советский район
Павловского, дома № 38 на ул. Васнецова и на ул. Авангардной, 50. В доме № 2 на ул. Голодеда демонтировали аварийный лист жести.Советский районРаботы по демонтажу аварийных листов жести проводились на ул. Кропоткина, 76 (напротив), ул. Тургенева, 1 (напротив), ул. Куйбышева, 29. Также демонтировали беседку на детской площадке в районе дома № 110 на ул. Кропоткина.
Центральный районПо ряду адресов спасатели демонтировали аварийные листы жести: на ул. Богдановича, 23, ул. Мельникайте, 12, Старовиленском тракте, 28, к. 1, и пр. Победителей, 57. Также потребовалась распилить аварийное дерево на ул. Грибоедова, 22 (напротив), и демонтировать плафон подсветки здания на ул. Романовская Слобода, 26.
Октябрьский районВ Октябрьском районе пока известно лишь об упавшем дереве на ул. Чкалова, 22.
Партизанский районВ Партизанском районе зафиксировано падение дерева на ул.![]() Солтыса, 5 (напротив), а также потребовался демонтаж аварийного листа жести на ул. Первомайской, 22, к. 1.
Солтыса, 5 (напротив), а также потребовался демонтаж аварийного листа жести на ул. Первомайской, 22, к. 1.
На ул. Волгоградской, 65 (напротив), проводились работы по распилке аварийного дерева, упавшего на территории. Демонтаж аварийного листа жести производился в пер. Калининградском, 20а (напротив), и на Логойском тракте, 10. Поврежденный билборд необходимо было демонтировать в районе дома № 23 на ул. Острошицкой.
Московский районНа ул. Кальварийской, 7 (напротив), демонтировали билборд, а на ул. Алибегова, 6, — аварийный лист жести.
Фото МЧС
Смотрите также:
Опубликовано: 14.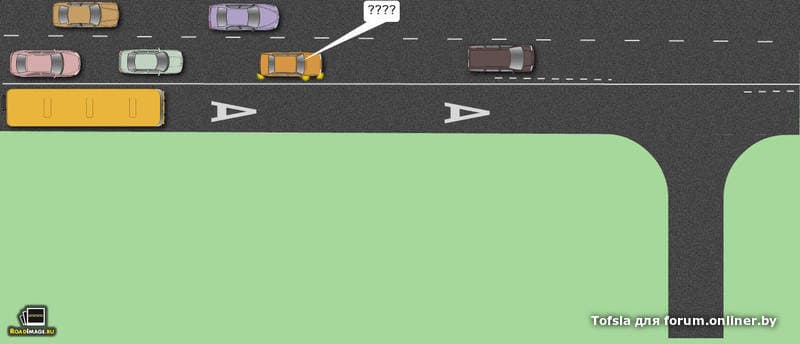 01.2022
01.2022
Ряд проектов по анализу пассажиропотока в общественном транспорте столицы прорабатывается Центром информационных технологий Мингорисполкома совместно с предприятиями «Минсктранс» и «Столичный транспорт и связь». Об этом в эфире программы «Говорит и показывает Минск» на «Радио Минск» сообщил заместитель директора КУП «Центр информационных технологий Мингорисполкома» Александр Василенко, сообщает корреспондент агентства «Минск-Новости».
— Видеокамеры смогут анализировать количество людей в салонах транспорта в то или иное время и в зависимости от различных условий, что поможет более рационально формировать маршруты, — добавил собеседник.
Говоря о перспективах развития искусственного интеллекта, он выразил мнение, что высококвалифицированных специалистов такие системы сейчас не заменят, но взять на себя ряд рутинной работы они вполне способны, причем выполнят ее быстрее, точнее и эффективнее.
— Технологии внедряются постепенно, апробируются, по каким-то из них мы уже видим определенные результаты, — добавил А. Василенко.
Опубликовано: 14.01.2022
По данным сайта Realt.by, средняя цена за однокомнатную квартиру в столице составляет 38 400 долларов. Реально ли купить недвижимость за эту сумму и как она выглядит, выяснила корреспондент агентства «Минск-Новости».
В Чижовке — за 37,5 тыс. долларовСветлая однушка на ул. Голодеда находится на первом этаже пятиэтажного дома. На окнах установлены стеклопакеты, имеется металлическая дверь. Высота потолков в квартире — 2,52 м. В комнатах сделан минимальный ремонт, есть мебель и сантехника, необходимая для проживания.
В комнатах сделан минимальный ремонт, есть мебель и сантехника, необходимая для проживания.Дом расположен в 10 минутах езды на общественном транспорте от станции метро «Автозаводская». Неподалеку есть поликлиники, школы, детские сады, рынок, магазины и кафе, а также экотропа «Чижовка».
В шаговой доступности от ст. м. «Грушевка» — за 37,7 тыс. долларовОднокомнатная квартира на ул. К. Либкнехта общей площадью 30,5 м2, по словам продавца, требует ремонта. Находится недвижимость на четвертом этаже кирпичного пятиэтажного дома.
Заменены окна и входная дверь. Базовая мебель и техника в однушке уже есть.
Станция метро «Грушевка» находится в шаговой доступности, у дома располагаются остановки общественного транспорта, также есть магазины, кафе, банки.
В Партизанском районе — за 38 тыс. долларовОднушка на первом этаже пятиэтажки в пер. Козлова занимает площадь 29,4 м2. В объявлении указывают, что этаж высокий, а окна выходят во двор. Балкона в квартире нет, но к жилью прилагается подвал.
В объявлении указывают, что этаж высокий, а окна выходят во двор. Балкона в квартире нет, но к жилью прилагается подвал.По словам продавца, квартира очень теплая и полностью готова к проживанию. На полу уложен линолеум, в санузле — плитка, установлены стеклопакеты, металлическая входная дверь, заменена сантехника.
Недвижимость находится в 10 минутах езды на общественном транспорте от станций метро «Площадь Победы» и «Тракторный завод». Все необходимое для комфортного проживания находится в шаговой доступности: школы, сады, магазины. Вблизи дома также расположен парк им. А. Герасименко с водным каналом.
Рядом со ст. м. «Пушкинская» — за 39,9 тыс. долларовНедвижимость на ул. Ольшевского находится на первом этаже хрущевки. В квартире есть балкон, установлена вся сантехника и мебель. Полы в однушке деревянные, санузел совмещенный.Рядом с домом есть ясли-сад, школа, продуктовые магазины, банк и почта. Продавец отмечается отличное транспортное сообщение.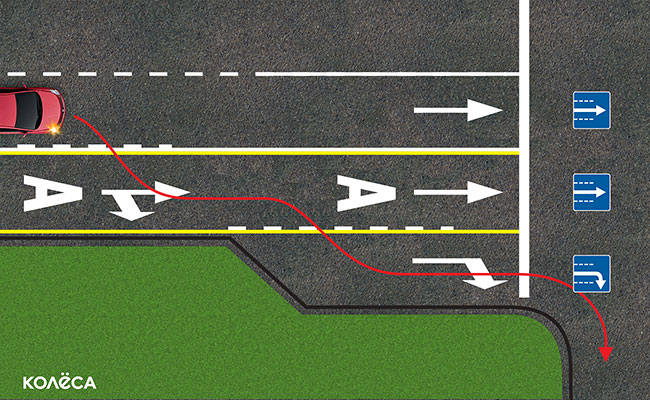 До станции метро «Пушкинская» 2 минуты ходьбы.
До станции метро «Пушкинская» 2 минуты ходьбы.
До станции метро «Партизанская» будущим владельцам нужно будет идти всего 7 минут. Неподалеку от дома находятся универмаг «Беларусь», магазины, банки, кинотеатр, детский сад и школа.
Фото: realt.by, kufar.by
Опубликовано: 14.01.2022
Совершим гастрономическое путешествие во времени и отправимся… назад в СССР вместе с корреспондентом агентства «Минск-Новости».
В старый Новый год вспомним, какие блюда обязательно присутствовали на праздничном столе в советское время. 31 декабря, как и сейчас, выходным днем не было. Всего лишь сокращенный рабочий день. Хозяйки заступали на вторую смену у плиты — готовили много, даже если семья была небольшой и гостей не ждали. Правда, в те годы забежать в конце декабря в универсам и купить все необходимое было просто невозможно. Ингредиенты для новогодних блюд собирали не один день. То майонез и шпроты в магазине «выбросят», то дадут сырокопченую колбасу и зеленый горошек. Только успевай отстоять в очереди и с гордой улыбкой победителя принести домой авоську с дефицитными продуктами. Мандарины из южных республик Страны Советов обычно привозили под Новый год, и за ними выстраивались огромные очереди.
31 декабря, как и сейчас, выходным днем не было. Всего лишь сокращенный рабочий день. Хозяйки заступали на вторую смену у плиты — готовили много, даже если семья была небольшой и гостей не ждали. Правда, в те годы забежать в конце декабря в универсам и купить все необходимое было просто невозможно. Ингредиенты для новогодних блюд собирали не один день. То майонез и шпроты в магазине «выбросят», то дадут сырокопченую колбасу и зеленый горошек. Только успевай отстоять в очереди и с гордой улыбкой победителя принести домой авоську с дефицитными продуктами. Мандарины из южных республик Страны Советов обычно привозили под Новый год, и за ними выстраивались огромные очереди.Чем ближе к заветной дате, тем больше холодильники советских граждан напоминали пещеру Али-Бабы. Домочадцы с нетерпением поглядывали на календарь и считали дни, когда можно будет вволю полакомиться. С тех пор, видимо, и пошла поговорка: не трогай, это на Новый год!
До сих пор помню один случай из своего детства. Отца в декабре отправили в командировку в Москву. Он привез оттуда несколько килограммов мандаринов, вкуснейшие шоколадные конфеты, несколько батонов колбасы, в том числе дефицитный финский сервелат, и другие вкусности. В тот год праздничный стол был особенно богатым. Бутерброды со шпротами, оливье и «селедка под шубой», курица, запеченная в духовке на бутылке (мне эта «птица счастья завтрашнего дня» почему-то напоминала космическую ракету), жареная камбала, отбивные, мясная нарезка… Достали и домашние заготовки — знаменитые мамины маринованные огурчики, легендарные папины соленые грузди и умопомрачительную бабушкину «пальцем пханую» вяленую колбаску…
Отца в декабре отправили в командировку в Москву. Он привез оттуда несколько килограммов мандаринов, вкуснейшие шоколадные конфеты, несколько батонов колбасы, в том числе дефицитный финский сервелат, и другие вкусности. В тот год праздничный стол был особенно богатым. Бутерброды со шпротами, оливье и «селедка под шубой», курица, запеченная в духовке на бутылке (мне эта «птица счастья завтрашнего дня» почему-то напоминала космическую ракету), жареная камбала, отбивные, мясная нарезка… Достали и домашние заготовки — знаменитые мамины маринованные огурчики, легендарные папины соленые грузди и умопомрачительную бабушкину «пальцем пханую» вяленую колбаску…
Конечно, все это одолеть за одну ночь было невозможно. И утро 1 января в советских семьях (да и сейчас во многих домах) начиналось с фразы: «Надо срочно доесть прошлогодние салаты, а то испортятся!» Но после ночного гастрономического безобразия так хотелось обычного куриного бульончика или стакан кефира…
Сегодня будем готовить курицу по советскому рецепту, а в бутерброды со шпротами внесем новые нотки. Так полезнее и вкуснее!
Так полезнее и вкуснее!
1 курица, пряности (карри, паприка, куркума, сухой укроп, сухой чеснок, чили), соль, перец — по вкусу, 3 зубчика чеснока, 2 ст. л. сметаны или майонеза.
Курицу моем, обсушиваем бумажным полотенцем. Натираем тушку изнутри и снаружи пряностями, солью и перцем. Очищенный чеснок пропускаем через пресс и хорошо смазываем курицу. Накрываем пищевой пленкой и оставляем мариноваться в холодильнике около часа (можно на ночь).
Берем невысокую бутылку, желательно, чтобы книзу она расширялась. Наливаем в нее воду, но не по самое горлышко, устанавливаем в сковороду. Усаживаем курицу на бутылку, кожицей закрываем горлышко. Смазываем курицу сметаной. Включаем духовой шкаф. На самый низ духовки кладем решетку, на нее ставим сковороду с курицей. В сковороду наливаем чашку воды. Запекаем птицу на среднем огне около часа, каждые 10–15 минут поворачивая сковороду на 90 градусов, чтобы корочка равномерно запекалась.![]()
1 банка шпрот, 4–5 ломтиков хлеба, 1–2 веточки кинзы или петрушки, 2 зубчика чеснока, 2 авокадо, 1 ст. л. лимонного сока, соль и перец — по вкусу.
Кинзу мелко рубим, чеснок пропускаем через пресс. Мякоть авокадо разминаем вилкой вместе с лимонным соком. Добавляем чеснок, зелень, соль и перец.
Ломтики хлеба обжариваем несколько минут на сковороде без масла или в тостере. Остужаем и смазываем пастой из авокадо. Сверху выкладываем шпроты.
Еще материалы рубрики:
ГУРМАН. Готовим вкуснейший плов по-узбекски и сочную самсу
ГУРМАН. Армянская кухня: готовим бозбаш из баранины и барурик
ГУРМАН. Финская кухня: рецепты сливочного супа с лососем и брусничного пирога
ГУРМАН. Португальская кухня: готовим запеченную треску
ГУРМАН.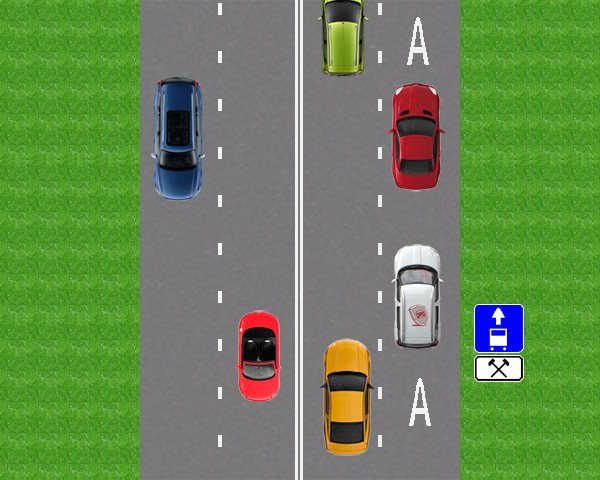 Всем любителям кофе посвящается. Рецепты бодрящего напитка
Всем любителям кофе посвящается. Рецепты бодрящего напитка
Опубликовано: 14.01.2022
Дети, которые в силу своего возраста не имеют права управлять транспортными средствами, изредка, но попадаются за рулем автомобиля или мотоцикла. Какие последствия для несовершеннолетних и их родителей могут наступить, разбирался корреспондент агентства «Минск-Новости».
Фото иллюстративное, pixabay.comИногда родители сами разрешают несовершеннолетним детям садиться за руль. Известны также случаи, когда подростки без разрешения берут ключи и документы от автомобиля и едут колесить по городу. Как бы то ни было, доверять подростку управление транспортным средством опасно. Ведь в юном возрасте ребенок не может полностью контролировать ситуацию на дороге, даже если рядом на пассажирском сиденье находится отец или мать.
А вот и недавний пример. В Бресте инспекторы ДПС остановили Tesla. Электрокаром под присмотром отца управляла 12-летняя девочка. Садиться за руль ребенок не имел права даже с разрешения отца. Видимо, оба решили, что учебная поездка пройдет мимо глаз инспекторов ГАИ. Не прошла.
Садиться за руль ребенок не имел права даже с разрешения отца. Видимо, оба решили, что учебная поездка пройдет мимо глаз инспекторов ГАИ. Не прошла.
По данным ГАИ ГУВД Мингорисполкома, несовершеннолетние за рулем транспортных средств — случаи единичные. Но они порой удивляют даже видавших виды инспекторов. Так, сотрудники отдела ГАИ Партизанского РУВД остановили ночью в пер. Козлова 16-летнего подростка. Юный автомобилист ехал на отцовском Nissan. Разумеется, водительского удостоверения у него не было. К тому же от парня исходил резкий запах алкоголя. Результат медосвидетельствования показал наличие в выдыхаемом нарушителем воздухе 0,44 промилле алкоголя. Молодой человек пояснил, что накануне с друзьями пил пиво. Затем ему стало скучно, он взял ключи от машины родителей, которых не было дома, и отправился кататься по ночному городу.
Правовую оценку действиям малолетнего нарушителя дала районная инспекция по делам несовершеннолетних.— Согласно ПДД, обучать управлению механическим транспортным средством в индивидуальном порядке разрешается только на площадках или автодромах, закрытых для дорожного движения, при наличии водительского удостоверения и водительского стажа не менее 2 лет, — напомнил начальник отдела ГАИ Московского РУВД Александр Алешкевич. — При этом транспортное средство должно быть соответствующим образом оборудовано. А те, кто просто так доверил руль ребенку, несут ответственность согласно ст. 18.14 КоАП. Передача управления транспортным средством лицу, не имеющему права управления, наказывается штрафом от 5 до 20 базовых величин. В случае повторного в течение года такого же нарушения правил сумма штрафа составит от 20 до 50 базовых. Предусмотрен и административный арест до 15 суток.
— При этом транспортное средство должно быть соответствующим образом оборудовано. А те, кто просто так доверил руль ребенку, несут ответственность согласно ст. 18.14 КоАП. Передача управления транспортным средством лицу, не имеющему права управления, наказывается штрафом от 5 до 20 базовых величин. В случае повторного в течение года такого же нарушения правил сумма штрафа составит от 20 до 50 базовых. Предусмотрен и административный арест до 15 суток.
Показателен и еще один случай. Пьяного школьника задержали ночью за рулем авто на ул. Варвашени. 17-летний парень на ВАЗ-2105 двигался по дворовой территории и был остановлен сотрудниками ГАИ для проверки документов. Водительского удостоверения он, конечно же, не имел. К тому же от парня сильно пахло алкоголем. После проведения освидетельствования в крови нарушителя обнаружили более 1 промилле алкоголя. По версии задержанного, накануне он выпил около 200 мл пива.
В отношении юноши составили административные протоколы за управление транспортным средством без водительского удостоверения и за вождение в нетрезвом состоянии. Материалы дела передали в районную инспекцию по делам несовершеннолетних для дальнейшей постановки нарушителя на профилактический учет.
Материалы дела передали в районную инспекцию по делам несовершеннолетних для дальнейшей постановки нарушителя на профилактический учет.
11 мая 2021 г. несовершеннолетний учащийся столичного лицея совершил ДТП и скрылся с места аварии. 17-летний парень ехал за рулем Rover по ул. Васнецова, не справился с управлением и совершил наезд на осветительную мачту. После этого молодой человек скрылся с места происшествия. Однако в ходе разыскных мероприятий милиционеры нашли горе-водителя. В момент задержания он находился дома.
Нарушителя доставили на освидетельствование, по результатам которого в его организме выявлено 2,14 промилле алкоголя. Со слов несовершеннолетнего, он выпил 3 л пива и решил в машине «перегнать антифриз».
В Московском районе внимание инспекторов ДПС привлек каршеринговый автомобиль, который проехал перекресток на пр. Дзержинского на красный свет. Экипаж догнал нарушителя — за рулем находился 17-летний парень.
— Несет ли наказание несовершеннолетний? Административной ответственности подлежит физическое лицо, достигшее ко времени совершения правонарушения возраста 16 лет, — продолжает А. Алешкевич. — Рассмотрением дел занимаются комиссии по делам несовершеннолетних. Не предусмотрена административная ответственность за совершенные нарушения в сфере безопасности дорожного движения и эксплуатации транспорта в отношении детей в возрасте 14–16 лет. В этом случае наказание несут родители или лица, их заменяющие. Невыполнение ими обязанностей по воспитанию детей согласно ст. 10.3 КоАП влечет за собой штраф в размере до 10 базовых величин. Родителям также нелишне знать, что в случае совершения ДТП обязанность по возмещению ущерба будет лежать на владельце транспортного средства, а не на ребенке.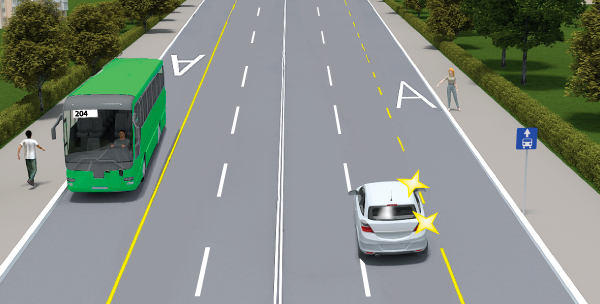
Опубликовано: 14.01.2022
Поворот налево в какую полосу
Как выбрать правильную траекторию при проезде перекрестков?
В этом материале мы узнаем, как правильно выбирать траекторию движения при проезде перекрестков. Проезд перекрестков описан в 13 главе Правил дорожного движения и частично в 8 главе в правилах маневрирования. Мы не будем подробно разбирать эти главы, а разберем, то чего в них не описано и на первый взгляд не очевидно, а именно выбор траектории движения транспортного средства в пределах перекрестка, возможные пересечения траекторий при проезде перекрестков и кто имеет преимущество.
Для начала возьмем простой перекресток с пересечением двух двухполосных дорог:
Нам нужно повернуть налево, в данной ситуации траектория выбирается очень просто, но давайте посмотрим что она из себя представляет. Это ни что иное, как полоса движения на перекрестке, определенная водителем
Полосы движения на перекрестке обозначаются разметкой 1. 7:
7:
1.7 (прерывистая линия с короткими штрихами и равными им промежутками) — обозначает полосы движения в пределах перекрестка;
А если разметка отсутствует, то самими водителями в соответствии с п.9.1 Правил дорожного движения:
9.1. Количество полос движения для безрельсовых транспортных средств определяется разметкой и (или) знаками 5.15.1, 5.15.2, 5.15.7, 5.15.8, а если их нет, то самими водителями с учетом ширины проезжей части, габаритов транспортных средств и необходимых интервалов между ними. При этом стороной, предназначенной для встречного движения на дорогах с двусторонним движением без разделительной полосы, считается половина ширины проезжей части, расположенная слева, не считая местных уширений проезжей части (переходно-скоростные полосы, дополнительные полосы на подъем, заездные карманы мест остановок маршрутных транспортных средств).
Главное, что следует понять — проезд перекрестков осуществляется по полосам движения, вне зависимости от того обозначены они разметкой или нет.
При проезде перекрестка следует руководствоваться правилом «помехи справа» — это мнение не верно. На перекрестке, как и на других участках дороги движение осуществляется по полосам и выезд из занимаемой полосы с сохранением направления является перестроением
Выше мы рассмотрели поворот на простом перекрестке, давайте рассмотрим поворот из двух рядов и определим приоритеты транспортных средств при пересечении траекторий.
При верной организации дорожного движения количество полос для указанного направления на въезде должно быть равно количеству полос на выезде в данном направлении. В данной ситуации поворот налево разрешен из двух полос и не смотря на отсутствие разметки поворот должен осуществляться в пределах своей полосы.
Рассмотрим расположение полос в разрешенных направлениях для проезда данного перекрестка:
Обратите внимание, две полосы имеют одно направление — налево!
Таким образом при повороте водитель белого автомобиля совершает перестроение и согласно п. 8.4 Правил дорожного движения должен пропустить водителя синего автомобиля.
8.4 Правил дорожного движения должен пропустить водителя синего автомобиля.
Должен ли водитель поворачивать правую полосу по п.8.6 ПДД?
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
Такое требование к водителям предъявляется Правилами дорожного движения РФ. Многие это требование отождествляют с требованием повернуть в крайнюю правую полосу. Насколько верно такое уравнение мы постараемся разобраться. Давайте посмотрим на обычную ситуацию — поворот на дорогу с припаркованными автомобилями. Как это выглядит, выполняя требование поворота в правую полосу.
[2]
Водитель должен выполнить поворот, затем сразу же переключить правый сигнал поворота на левый и приступить к перестроению. При этом он меньше, чем за секунду теряет преимущество перед встречным автомобилем, совершающим поворот налево.
Это стандартная дорожная ситуация, и то что законодатель хотел такого сценария очень сомнительно.
Для чего же нужен этот абзац? Давайте обратимся к первоисточнику Правил дорожного движения — Конвенции о дорожном движении и попробуем найти ответ там
a) Если он намерен выехать с дороги со стороны, соответствующей направлению движения, — приблизиться, насколько это возможно, к краю проезжей части дороги, соответствующему этому направлению, и затем выполнить возможно более короткий маневр;
Оригинал на английском:
(a) If he wishes to turn off on the side appropriate to the direction of traffic, keep as close as possible to the edge of the carriageway appropriate to that direction and make as tight a turn as possible;
Основной смысл абзаца п.8.6 ПДД :
При повороте направо транспортное средство должно двигаться по возможности ближе к правому краю проезжей части.
— выполнить возможно более короткий и быстрый маневр. То есть маневр нужно по возможности сократить до минимума и продолжить движение в выбранном направлении. Требования и смылса занимать крайнюю правую полосу после поворота нет. Поэтому в правилах РФ такая лояльная формулировка. В рассмотренных выше ситуациях маневр перестроение непосредственно связан с поворотом и вносит дополнительные сложности и неопределенности для участников движения.
Требования и смылса занимать крайнюю правую полосу после поворота нет. Поэтому в правилах РФ такая лояльная формулировка. В рассмотренных выше ситуациях маневр перестроение непосредственно связан с поворотом и вносит дополнительные сложности и неопределенности для участников движения.
Поворот должен быть коротким
Сравните две траектории движения, при изначальном намерении водителя двигаться после поворота во второй от края полосе, разрешенной для движения.
В соответствии с п.9.4 правил, водители могут двигаться по удобной для них полосе при движении в населенном пункте
В населенных пунктах с учетом требований настоящего пункта и пунктов 9.5, 16.1 и 24.2 Правил водители транспортных средств могут использовать наиболее удобную для них полосу движения. При интенсивном движении, когда все полосы движения заняты, менять полосу разрешается только для поворота налево или направо, разворота, остановки или объезда препятствия.
Подытожим.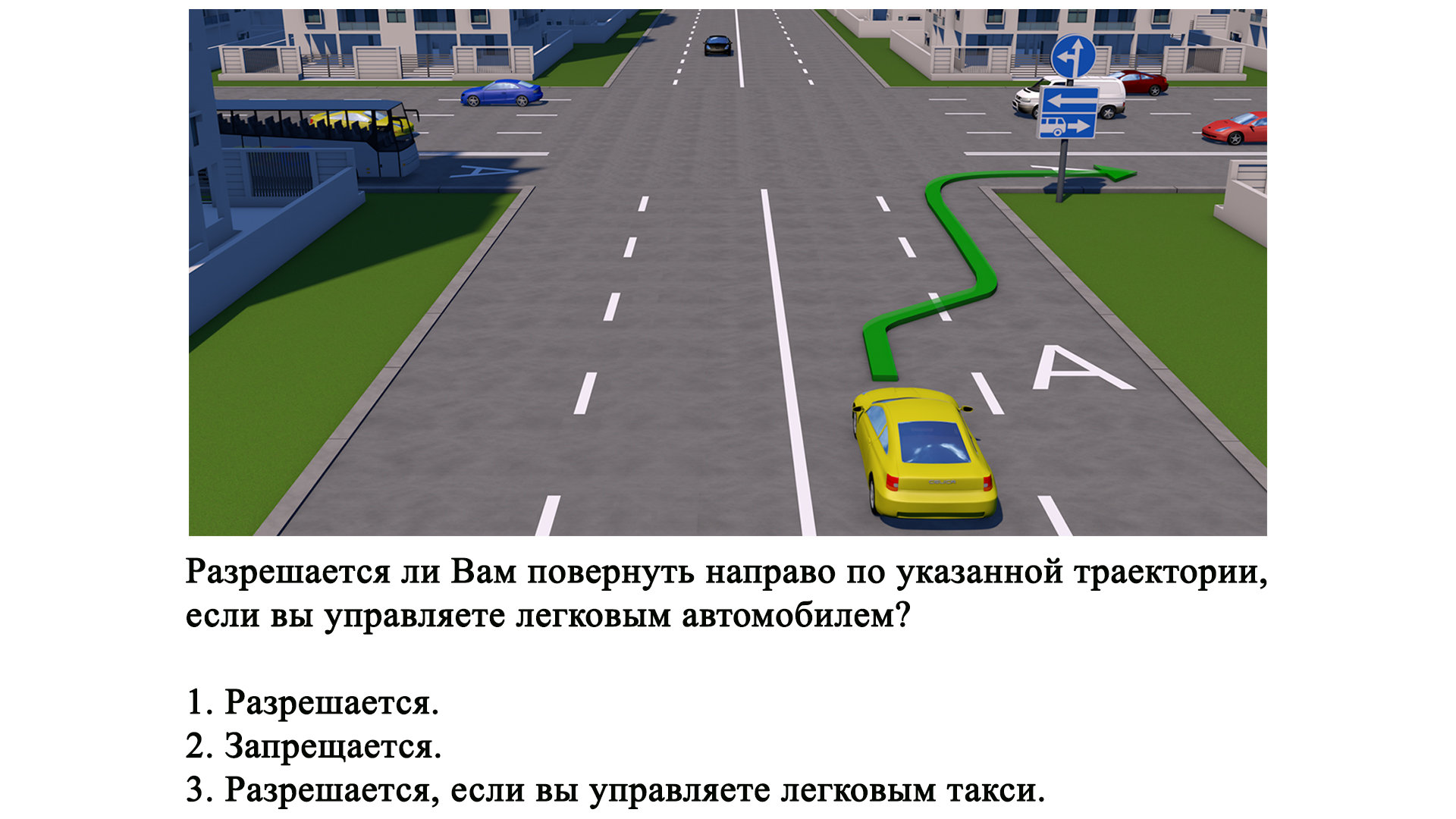 В Правилах дорожного движения отсутствует требование поворот направо совершать в крайнюю правую полосу. Маневр должен быть быстрым и коротким. Водитель может использовать удобную для дальнейшего движения полосу. .
В Правилах дорожного движения отсутствует требование поворот направо совершать в крайнюю правую полосу. Маневр должен быть быстрым и коротким. Водитель может использовать удобную для дальнейшего движения полосу. .
В пункте 8.6 изложены общие требования при совершении поворота, а требование занять определенную полосу применяется в специальном пункте при выезде на дорогу с реверсивным движением, где требование выражено явно:
9.8. При повороте на дорогу с реверсивным движением водитель должен вести транспортное средство таким образом, чтобы при выезде с пересечения проезжих частей транспортное средство заняло крайнюю правую полосу…
Популярные публикации
Последние комментарии
Куда попадать после поворота налево? -ПДД
Каждый водитель, перед тем как совершить левый поворот еще до начала выполнения маневра должен посмотреть туда, куда он поворачивает, и определить створ, в который он будет направлять нос своего автомобиля.
Не мешает заранее увидеть и другие автомобили, с которыми у вас может произойти «конфликт» направлений движения.
Принцип определения створа зависит, прежде всего, от типа перекрестка (схемы организации движения). Так же принцип определения створа зависит и от того, как нанесена разметка и от конфигурации перекрестка.
Начнем с ситуаций, когда поворот разрешен из одного рядаЧтобы объяснить, как определять створ, в который нужно попадать при выезде с перекрестка возьмем простой перекресток. Поворот налево в один ряд по главной дороге.
Продлеваем ось пересекаемой дороги до линии пересечения проезжих частей. Это точка «А». Продлеваем линию дальнего бордюра пересекаемой дороги до линии пересечения проезжих частей. Это точка «Б». Отрезок между точками «А» и «Б» и есть створ, в который мы должны попасть, покидая перекресток, независимо от того выезжали мы к центру перекрестка или нет.
Обратите внимание, что точка «А» находится именно на пересечении проезжих частей. Это крайняя точка, куда может подъехать вдоль оси пересекаемой второстепенной дороги другой автомобиль. Даже после остановки у стоп-линии.
Это крайняя точка, куда может подъехать вдоль оси пересекаемой второстепенной дороги другой автомобиль. Даже после остановки у стоп-линии.
И пускать точку «А» под автомобилем при завершении левого поворота нельзя.
А вот положение точки «Б» совершенно не принципиально.
При повороте налево с второстепенной дороги или на равнозначном перекрестке створ уже находится на линии, соединяющей равноудаленные от центра перекрестка точки, соединяющие начала закруглений перекрестка.
Перед тем как совершить левый поворот с второстепенной дороги вы все равно будете находиться перед пересечением проезжих частей до тех пор, пока не уступите всем.
Когда же вы начнете поворачивать, то в ваших же интересах освободить перекресток как можно быстрее.
И снова положение точки «А» имеет принципиальное значение. Точки «Б» — нет.
Если мы поворачиваем на зеленый сигнал светофора или стрелку, створ уже определяется разметкой или тем местом, где стоят автомобили на красный свет по пересекаемой дороге. В любом случае попадать на встречную полосу нельзя.
В любом случае попадать на встречную полосу нельзя.
В настоящее время сложилась практика, что при повороте налево из одного ряда, водители едут сразу в тот ряд, который им необходим.
Водители поступают так, потому что так удобнее.
Но, согласно ПДД – это нарушение, хотя обычно за это никто не наказывает.
«Полоса движения»Чтобы разобраться в этом вопросе, нужно вспомнить определения терминов «полоса движения», «перекресток» и требования пункта 60. Правил.
[3]
— любая из продольных полос проезжей части дороги, обозначенная или не обозначенная горизонтальной дорожной разметкой и имеющая ширину, достаточную для движения транспортных средств (за исключением одноколейных) в один ряд.
«Перекресток»— место пересечения, примыкания или разветвления дорог на одном уровне.
Граница перекрестка определяется воображаемыми линиями, соединяющими соответственно противоположные, наиболее удаленные от центра перекрестка начала закруглений проезжих частей дорог.
И так, полоса движения может быть обозначена или не обозначена.
Между перекрестками полосы чаще всего обозначены, на перекрестках – чаще не обозначены.
Если полоса не обозначена, она все равно существует, даже на перекрестке.
И если водитель поворачивает налево на многополосную дорогу, то первая полоса, в которой он оказывается уже на перекрестке – левая крайняя.
И пока водитель не покинет перекресток, он не имеет права совершать перестроение в соседние полосы, находящиеся правее.
А перестроение на перекрестке (кроме кругового) запрещено пунктом 60.ПДД.
Так что вопрос про то, в какую полосу попадать после поворота налево, сам по себе не корректен, так как водитель попадает в левую крайнюю полосу еще на перекрестке, и только покинув перекресток может начать перестроение.
Поворот налево из двух рядов одновременно
Если говорить о повороте из двух рядов одновременно, где бы то ни было, нельзя не отметить, что такая организация движения — это удобство для тех, кто движется по знакомому маршруту.
Тот, кто едет по незнакомому маршруту, все равно будет заранее занимать левый крайний ряд и, только если успеет вовремя сообразить и сориентироваться, то может быть перестроится правее. А потом у того, кто в левом крайнем ряду возникает проблема. Его сразу загоняют в левый крайний ряд, а потом могут и не дать перестроиться.
Для скорейшего освобождения перекрестка водители при одновременном повороте особенно не ссорятся. Левый крайний едет в левый крайний ряд за перекрестком, а сосед попадает в соседний правый ряд.
Если вы оказались в левом крайнем ряду перед поворотом, а потом вам нужно перестроиться правее, то уже на выезде с перекрестка вы можете переключить левый «поворотник» на правый и сразу же за перекрестком уже пробовать перестраиваться правее.
В основном проблемы и возникают у того, кто поворачивает в левом крайнем ряду.
Но даже если поворачивать по схеме «левый крайний в левый крайний ряд, а сосед справа в соседний справа ряд», то все равно у водителей могут возникнуть проблемы. Если на перекрестке не нанесена разметка. Если один водитель начнет поворачивать позже, а другой сбоку — раньше.
И это все из-за того, что не нанесена разметка, которая является единственным способом очертить траекторию движения.
Как не допустить конфликта при отсутствии разметки?Необходимо быть внимательными друг к другу и не проезжать перекресток параллельно с соседним автомобилем..
Можно попробовать вырваться вперед на самом перекрестке.
Можно правому водителю, двигаясь через перекресток сразу руль не крутить, а начать поворот позже, оставляя запас расстояния между автомобилями.
А можно «висеть на хвосте». То есть держаться позади, чтобы вовремя среагировать на движение соседнего водителя.![]() Так может действовать как правый, так и левый водитель. Но при этом нужно помнить не только о переднем, но и о заднем водителе.
Так может действовать как правый, так и левый водитель. Но при этом нужно помнить не только о переднем, но и о заднем водителе.
Понравилась статья? Подпишитесь на канал, чтобы быть в курсе самых интересных материалов
Сложный маневр – поворот налево на перекрестке со светофором
Поворот налево на многополосных дорогах кажется на первый взгляд достаточно сложным маневром.
Связано это с тем, что приходится поворачивать аккуратно и за пару приемов.
Но если действовать по правилам, то трудностей не возникает.
Правила пересечения регулируемых перекрестков
Приближаясь к пересечению двух и более дорог, определяем тип перекрестка: регулируемый или нерегулируемый. От этого зависит порядок наших последующих действий на дороге. Регулируемым считается тот перекресток, на котором есть светофор или работает сотрудник ГИБДД в качестве регулировщика. Для таких перекрестков в ПДД существуют правила их проезда:
- Работающий трехцветный светофор отменяет действующие знаки «Главная дорога» и «Уступите дорогу».

- Двигаться можно только на зеленый (разрешающий) сигнал. Соблюдать при движении рядность, а соответствующую полосу занимать заранее.
- При загорании разрешающего сигнала светофора, следует уступить дорогу всем ТС и пешеходам, завершающим свой маневр на перекрестке.
- У светофора с дополнительной секцией со стрелкой движение разрешается только в направлении, указываемом стрелкой и при ее включении.
- Зеленая стрелка включается одновременно с красным сигналом. Это означает, что проезд в этом направлении разрешается, но при этом потребуется уступить дорогу всем ТС, движущимся в других направлениях.
- Действия регулировщика обладают самым высоким приоритетом, даже если они противоречат дорожной разметке и сигналу светофора.
Начинающие водители первое время боятся оживленных перекрестков и поворотов на нем налево. Причин этому несколько.
Поворот налево – траектория
Во-первых, при подобном маневре приходится быть особенно внимательным и пропускать не только встречный транспорт, но и пешеходов. Скорость встречного движущегося потока может быть высокой, что и создает у новичков нервозность, во время ожидания «окна» для маневра.
Скорость встречного движущегося потока может быть высокой, что и создает у новичков нервозность, во время ожидания «окна» для маневра.
Во-вторых, при левом повороте стойка автомобиля ухудшает обзор и приходится дополнительно вертеть головой для безопасного завершения маневра.
В-третьих, часто приходится завершать маневр под мигающий зеленый и проезжать перекресток вместе с уже начавшими движение машинами поперечного направления. Такая ситуация исключается, если у светофора есть дополнительная боковая секция со стрелкой.
Рекомендации новичкам, которые помогут чувствовать себя увереннее на перекрестке:
- Если вы приближаетесь к светофору с горящим зеленым, снизьте скорость. Возможно, в это время завершает маневр автомобиль, не успевший проехать. Особенно внимательным нужно быть на ограниченно просматриваемых перекрестках.
- Заметив вдали красный сигнал светофора, не торопитесь и снизьте скорость. Пока вы будете приближаться, может загореться зеленый, и вы проедете без остановки.
- Не рекомендуется проскакивать регулируемый перекресток на мигающий зеленый сигнал. Светофор мигает всего 3 секунды, а затем на нем загорается желтый, проезд на который запрещен. Продолжать движение можно только в случае, если придется воспользоваться экстренным торможением для остановки.
Поворот налево на перекрестке
Двигаясь по главной дороге или на разрешающий сигнал светофора, и поворачивая налево, водитель обязан убедиться в безопасности совершаемого действия согласно ПДД. Для этого посмотреть в зеркала заднего вида и на зебру для пешеходов впереди.
Всегда могут найтись лихачи, которые срежут угол поворота или объедут вас слева, например, с трамвайных путей.
В отсутствие встречки совершать левый поворот можно сходу, не занимая выжидательной позиции в центре перекрестка. У такого метода есть свои преимущества. Минимальное время нахождения на полосе встречного потока, не создается помеха идущим позади автомобилям.
Как не попасть в аварию на перекрестке
В остальных случаях водитель должен занять выжидательную позицию на линии перед выездом на перекресток, включить левый поворот и пропускать встречные автомашины. На середину пересечения дорог выезжать не рекомендуется по следующим причинам:
На середину пересечения дорог выезжать не рекомендуется по следующим причинам:
- Пустая трата вашего времени.
- Если загорится красный свет, а проехать вы не успеете, то можно оказаться в неприятной ситуации и перекрыть проезд для автомобилей.
- Идущая следом машина может попытаться проехать прямо, не дожидаясь, когда полностью освободиться полоса движения, и спровоцировать ДТП.
- Выезд на середину перекрестка оправдан, если встречная автомашина также поворачивает налево, тогда маневр можно завершить без риска для других участников движения.
Дополнительная стрелка указателя поворота упрощает совершение подобного маневра.
Приближаясь к такому светофору, водитель должен знать следующее:
- Сигнал основной секции светофора всегда находится в приоритете. Если зеленая стрелка совпадает с таким же на светофоре, проезжаем не задумываясь, – у нас главная дорога.
- Зеленая стрелка с красным основным светом означает необходимость предоставить преимущество другим транспортным средствам. Например, поворачивающим направо автомашинам.
- Свою полосу для поворота занимаем заблаговременно. Она имеет графическое обозначение на асфальте и соответствующий знак перед перекрестком. Перестроения непосредственно перед стоп-линией запрещены.
- При совершении данного маневра нельзя использовать правило правой руки. Правильнее руководствоваться только сигналами светофора и дополнительными знаками.
 Например, поворачивающим направо автомашинам.
Например, поворачивающим направо автомашинам.Действия водителя при регулировщике ничем не отличаются. Поворот налево разрешен всего в трех случаях:
- Регулировщик стоит боком, руки вытянуты или опущены вниз;
- Регулировщик стоит левым боком, правая рука вытянута в сторону;
- Регулировщик стоит к вам лицом, правая рука направлена в вашу сторону.
Вероятные аварийные ситуации и как их избежать
Внимательно следить за пешеходами и их передвижениями.| Видео (кликните для воспроизведения). |
При завершении маневра водитель всегда должен их пропустить, даже если отсутствует разметка пешеходного перехода.
Двигаясь за поворачивающим налево автомобилем, будьте особенно внимательны – он закрывает обзор, и за ним может внезапно оказаться человек.
Включенный поворотник у встречного или попутного автомобиля не всегда означает готовность совершить маневр. Возможно, водитель позабыл его отключить или виновна неисправность. Поворачиваем после того, как точно стало известно направление движения этого автомобиля.
У большегрузных машин и длинномеров радиус разворота больше и есть вероятность заноса задней выступающей части. Это необходимо учитывать, совершая с ними маневр в попутном или встречном направлении.
Всегда при повороте налево пользуйтесь принципом – не начинайте маневр, если видимость недостаточна или участок дороги занят другими автомобилями.
Дорогие читатели, информация в статье могла устареть, воспользуйтесь бесплатной консультацией позвонив по телефонам: Москва +7 (499) 288-73-46 , Санкт-Петербург +7 (812) 317-70-86 или задайте вопрос юристу через форму обратной связи, расположенную ниже.
Популярные публикации
Последние комментарии
Куда попадать после поворота налево? -ПДД
Каждый водитель, перед тем как совершить левый поворот еще до начала выполнения маневра должен посмотреть туда, куда он поворачивает, и определить створ, в который он будет направлять нос своего автомобиля.Не мешает заранее увидеть и другие автомобили, с которыми у вас может произойти «конфликт» направлений движения.
Принцип определения створа зависит, прежде всего, от типа перекрестка (схемы организации движения). Так же принцип определения створа зависит и от того, как нанесена разметка и от конфигурации перекрестка.
Начнем с ситуаций, когда поворот разрешен из одного рядаЧтобы объяснить, как определять створ, в который нужно попадать при выезде с перекрестка возьмем простой перекресток. Поворот налево в один ряд по главной дороге.
Продлеваем ось пересекаемой дороги до линии пересечения проезжих частей.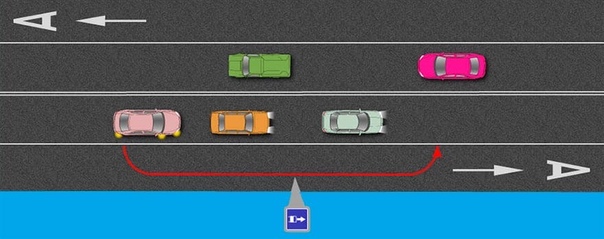 Это точка «А». Продлеваем линию дальнего бордюра пересекаемой дороги до линии пересечения проезжих частей. Это точка «Б». Отрезок между точками «А» и «Б» и есть створ, в который мы должны попасть, покидая перекресток, независимо от того выезжали мы к центру перекрестка или нет.
Это точка «А». Продлеваем линию дальнего бордюра пересекаемой дороги до линии пересечения проезжих частей. Это точка «Б». Отрезок между точками «А» и «Б» и есть створ, в который мы должны попасть, покидая перекресток, независимо от того выезжали мы к центру перекрестка или нет.
Обратите внимание, что точка «А» находится именно на пересечении проезжих частей. Это крайняя точка, куда может подъехать вдоль оси пересекаемой второстепенной дороги другой автомобиль. Даже после остановки у стоп-линии.
И пускать точку «А» под автомобилем при завершении левого поворота нельзя.
А вот положение точки «Б» совершенно не принципиально.
При повороте налево с второстепенной дороги или на равнозначном перекрестке створ уже находится на линии, соединяющей равноудаленные от центра перекрестка точки, соединяющие начала закруглений перекрестка.
Перед тем как совершить левый поворот с второстепенной дороги вы все равно будете находиться перед пересечением проезжих частей до тех пор, пока не уступите всем.
Когда же вы начнете поворачивать, то в ваших же интересах освободить перекресток как можно быстрее.
И снова положение точки «А» имеет принципиальное значение. Точки «Б» — нет.
Если мы поворачиваем на зеленый сигнал светофора или стрелку, створ уже определяется разметкой или тем местом, где стоят автомобили на красный свет по пересекаемой дороге. В любом случае попадать на встречную полосу нельзя.
У многих водителей возникает вопрос:«В какую полосу после поворота налево попадать, когда поворот налево осуществляется на многополосную дорогу?»В настоящее время сложилась практика, что при повороте налево из одного ряда, водители едут сразу в тот ряд, который им необходим.
Водители поступают так, потому что так удобнее.
Но, согласно ПДД – это нарушение, хотя обычно за это никто не наказывает.
Чтобы разобраться в этом вопросе, нужно вспомнить определения терминов «полоса движения», «перекресток» и требования пункта 60. Правил.
Правил.
— любая из продольных полос проезжей части дороги, обозначенная или не обозначенная горизонтальной дорожной разметкой и имеющая ширину, достаточную для движения транспортных средств (за исключением одноколейных) в один ряд.
«Перекресток»— место пересечения, примыкания или разветвления дорог на одном уровне.
Граница перекрестка определяется воображаемыми линиями, соединяющими соответственно противоположные, наиболее удаленные от центра перекрестка начала закруглений проезжих частей дорог.
И так, полоса движения может быть обозначена или не обозначена.
Между перекрестками полосы чаще всего обозначены, на перекрестках – чаще не обозначены.
Если полоса не обозначена, она все равно существует, даже на перекрестке.
И если водитель поворачивает налево на многополосную дорогу, то первая полоса, в которой он оказывается уже на перекрестке – левая крайняя.
И пока водитель не покинет перекресток, он не имеет права совершать перестроение в соседние полосы, находящиеся правее.
[1]

А перестроение на перекрестке (кроме кругового) запрещено пунктом 60.ПДД.
Так что вопрос про то, в какую полосу попадать после поворота налево, сам по себе не корректен, так как водитель попадает в левую крайнюю полосу еще на перекрестке, и только покинув перекресток может начать перестроение.
Поворот налево из двух рядов одновременно
Если говорить о повороте из двух рядов одновременно, где бы то ни было, нельзя не отметить, что такая организация движения — это удобство для тех, кто движется по знакомому маршруту.
Тот, кто едет по незнакомому маршруту, все равно будет заранее занимать левый крайний ряд и, только если успеет вовремя сообразить и сориентироваться, то может быть перестроится правее. А потом у того, кто в левом крайнем ряду возникает проблема. Его сразу загоняют в левый крайний ряд, а потом могут и не дать перестроиться.
Для скорейшего освобождения перекрестка водители при одновременном повороте особенно не ссорятся. Левый крайний едет в левый крайний ряд за перекрестком, а сосед попадает в соседний правый ряд.
Левый крайний едет в левый крайний ряд за перекрестком, а сосед попадает в соседний правый ряд.
Если вы оказались в левом крайнем ряду перед поворотом, а потом вам нужно перестроиться правее, то уже на выезде с перекрестка вы можете переключить левый «поворотник» на правый и сразу же за перекрестком уже пробовать перестраиваться правее.
В основном проблемы и возникают у того, кто поворачивает в левом крайнем ряду.
Но даже если поворачивать по схеме «левый крайний в левый крайний ряд, а сосед справа в соседний справа ряд», то все равно у водителей могут возникнуть проблемы. Если на перекрестке не нанесена разметка. Если один водитель начнет поворачивать позже, а другой сбоку — раньше.
И это все из-за того, что не нанесена разметка, которая является единственным способом очертить траекторию движения.
Как не допустить конфликта при отсутствии разметки?Необходимо быть внимательными друг к другу и не проезжать перекресток параллельно с соседним автомобилем. .
.
Можно попробовать вырваться вперед на самом перекрестке.
Можно правому водителю, двигаясь через перекресток сразу руль не крутить, а начать поворот позже, оставляя запас расстояния между автомобилями.
А можно «висеть на хвосте». То есть держаться позади, чтобы вовремя среагировать на движение соседнего водителя. Так может действовать как правый, так и левый водитель. Но при этом нужно помнить не только о переднем, но и о заднем водителе.
Понравилась статья? Подпишитесь на канал, чтобы быть в курсе самых интересных материалов
Сложный маневр – как правильно выполнить поворот на перекрестке
Ну вот и сданы экзамены в автошколе, и права на руках.
А что дальше? Как, выехав на дорогу, не растеряться и не забыть элементарное?
Как правило, у начинающих водителей возникают сложности при выполнении поворота на перекрестке.
Существующие правила велят перед любым поворотом либо разворотом заранее занять соответствующую полосу движения, разрешающую дальнейшее движение в выбранном направлении. Эта норма действенна на всех перекрестках и вне их. Кроме того, перед совершением любого поворота либо разворота обязательно нужно:
Эта норма действенна на всех перекрестках и вне их. Кроме того, перед совершением любого поворота либо разворота обязательно нужно:
- заранее включить сигнал соответствующего поворота, предупредив о своем намерении остальных водителей;
- при приближении к повороту сбавить скорость;
- снижая скорость, перейти на пониженную передачу. Сделать это нужно быстро, чтобы при вхождении в поворот держать руль двумя руками;
- перед самим поворотом посмотреть в зеркала — не нужно ли уступить кому-то дорогу. И если никаких помех нет, можно поворачивать руль в нужном направлении;
- закончив поворот, если впереди нет препятствия, можно прибавлять газ.
Рассмотрим несколько вариантов поворотов.
Поворот с крайней левой полосы
Согласно существующим правилам, с крайней левой полосы можно осуществить поворот налево или разворот, если это не запрещено дорожными знаками или разметкой. Вспомним главные правила поворота налево и разворота:
- предварительно занять соответствующую полосу на дороге — в нашем случае крайнюю левую, и включить левый поворотник;
- можно разворачиваться с трамвайных путей, если это не препятствует движению трамвая и не запрещено дорожными знаками;
- важно, выполняя манёвр, не оказаться на встречной полосе.

Поворот с крайней левой полосы
Срезание поворота
Все видели, как участники гонок срезают повороты с целью обойти соперника, максимально используя при таком маневре ширину трассы. Но в гонках такие вхождения в повороты оправданы, поскольку отсутствует поток встречного транспорта. Во всех остальных случаях срезание поворота может привести к серьезным последствиям.
Траектория движения при левом повороте
Запомните — вхождение в поворот на большой скорости провоцирует потерю автомобилем управляемости и устойчивости, в результате чего автомобиль выносит на встречную полосу или обочину.
А главная обязанность водителя — обеспечить безопасность себе и остальным участникам движения. Поэтому, входя в поворот, нужно находиться только на своей полосе движения и выбирать скоростной режим в соответствии с обстановкой на дороге, для чего переключать скорость нужно до начала маневра.
Помеха с правой стороны
Даже не будучи водителем, каждый слышал фразу «помеха справа» — что же это за помеха? Перелистав действующие правила, вряд ли вы найдете в них такой термин. Все дело в том, что это условное выражение, и обозначает оно вот что — не везде есть светофор, регулировщик или дорожные знаки, поэтому в их отсутствие последовательность проезда ничем не регулируемого перекрестка определяют сами водители, пропуская вперед машину, являющуюся помехой для движения с правой стороны. Лишь пропустив её, можно двигаться дальше.
Все дело в том, что это условное выражение, и обозначает оно вот что — не везде есть светофор, регулировщик или дорожные знаки, поэтому в их отсутствие последовательность проезда ничем не регулируемого перекрестка определяют сами водители, пропуская вперед машину, являющуюся помехой для движения с правой стороны. Лишь пропустив её, можно двигаться дальше.
Проще говоря, оказавшись на перекрестке равнозначных дорог, нужно посмотреть направо и, если там есть автомобиль, обязательно уступить ему дорогу.
Помеха справа – сначала пропусти, потом поворачивай налево
Правило помехи справа не применяется в случаях встречи на равнозначном перекрестке:
- пешехода и автотранспорта;
- трамвая и нерельсового транспортного средства.
Дело в том, что пешеходы и трамваи имеют особый статус участников движения. Кроме того важно помнить, что в равнозначных условиях трамвай всегда едет первым.
Поэтому нужно научиться быстро определять свое положение на дороге и те автомобили, которым нужно уступить первенство движения.
Поворот налево с двух крайних левых полос
Поворачивать налево намного труднее, чем направо, поскольку приходится держать под зрительным контролем весь транспорт со всех сторон перекрестка. Поэтому, осуществляя поворот налево, можно вырисовать себе поэтапную инструкцию и следовать ей.
- На первом этапе, когда только происходит подготовка к повороту, нужно занять на дороге крайнее левое положение. При выборе этого положения тоже могут возникать трудности, особенно если это многополосное движение и есть линия разметки, разделяющая встречные автопотоки. На такой дороге выбрать крайнее левое положение подразумевает необходимость подъехать как можно ближе к линии оси.
Но случается попасть на дорогу, где вообще отсутствует любая разметка, как же тогда поступать и к чему прижиматься?
Здесь нужно представить, где примерно дорога делится пополам и занять на дороге положение, явно указывающее остальным водителям на намерение повернуть налево.![]()
Обязательно при выполнении манёвра должны быть включены поворотники.
- На втором этапе осуществления поворота налево нужно мысленно определить центр перекрестка, доехать до него и после этого повернуть. Выполняя манёвр именно таким образом, автомобиль всегда остаётся справа на своей полосе движения, избегая аварийного столкновения. Чтобы убедиться в правильности определения центра перекрестка, нужно обратить внимание на встречные автомобили, на их траекторию движения. Если они едут прямо или поворачивают направо и при этом не мешают выбранной нами траектории движения, значит все верно. Нужно лишь немного сбавить скорость и уступить дорогу автомобилям, движущимся навстречу. Можно даже для этого остановиться в центре перекрестка. Но ни в коем случае нельзя изменять намеченную траекторию движения. Если же встречная машина будет поворачивать налево, вы разъедетесь так, что центр перекрестка окажется между машинами. Отсюда можно сделать вывод, что выезд в самый центр перекрестка является оптимальной траекторией при повороте налево на любом перекрестке.

- Как же найти этот пресловутый центр на перекрестке, ведь понятно, что нарисованной точки в центре не будет. Включайте наблюдательность. В теплое время года асфальт перекрестка буквально изрисован следами шин. Лишь самый центр перекрестка остается нетронутым пятном. А следы шин еще и подскажут, как его принято объезжать именно в этом месте. Зимой в месте предполагаемого центра лежит никем не тронутый снег.
- Ну и третий этап — непосредственно выезд с самого перекрестка. Здесь тоже есть свои варианты действий. Если, поворачивая, выезжаем на дорогу с двумя полосами движения, нужно лишь плавно заехать на свою полосу. Если же дорога многополосная, нужно заранее определиться с полосой, на которую нужно выехать и двигаться по намеченной траектории.
Таким образом, при повороте важно, четко придерживаясь действующих правил и здравого смысла, наметить траекторию движения и придерживаться её, несмотря на возможные остановки. Потому как любое отклонение от выбранного пути может стать причиной аварии.
Видео на тему
Дорогие читатели, информация в статье могла устареть, воспользуйтесь бесплатной консультацией позвонив по телефонам: Москва +7 (499) 288-73-46 , Санкт-Петербург +7 (812) 317-70-86 или задайте вопрос юристу через форму обратной связи, расположенную ниже.
Обсуждаем ПДД с Юрием Красновым. Поворот налево из двух полос: кто куда становится?
 Далее идут подпункты, которые содержат отдельные требования для каждого вида маневра.
Далее идут подпункты, которые содержат отдельные требования для каждого вида маневра.
| Видео (кликните для воспроизведения). |
Источники
Юсуфов, А. Г. История и методология биологии / А.Г. Юсуфов, М.А. Магомедова. — М.: Высшая школа, 2014. — 238 c.
Корпоративное право. Актуальные проблемы. — М.: Инфотропик Медиа, 2015. — 242 c.
Гуреев, В. А. Комментарий к Федеральному Закону «О судебных приставах» / В.А. Гуреев. — М.: Wolters Kluwer, 2017. — 208 c.- Марченко, М. Н. Теория государства и права в вопросах и ответах / М.Н. Марченко. — М.: ТК Велби, Проспект, 2007. — 240 c.
 — 240 c.
— 240 c.Поворот налево в какую полосу
Оценка 5 проголосовавших: 1Специализация: юриспруденция.
Образование: высшее.
Стаж работы: 12 лет.
: Кодекс штата Индиана 2012 г. :: Кодексы и законы США :: Законодательство США :: Justia
IC 9-21-8Глава 8. Эксплуатация автомобиля
IC 9-21-8-0.1
Отменен
( Отменен PL63-2012, SEC.11.)
9 IC 9 0003 9 21-8-0.5
Текстовое сообщение
Сек. 0,5. Как используется в этой главе, «текстовое сообщение» означает сообщение в форме электронного текста, отправленного с телекоммуникационного устройства.
Как добавил П.Л.185-2011, СЕК.3.
ИК 9-21-8-1
Невыполнение законного распоряжения сотрудника правоохранительных органов
Сек. 1. Сознательное невыполнение лицом законного приказа или указания сотрудника правоохранительных органов, наделенного законом полномочиями направлять, контролировать или регулировать дорожное движение, является незаконным.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-2
Дороги; использование правой половины; исключения; движение на пониженной скорости
Сек.2. (a) На всех проезжих частях достаточной ширины транспортное средство должно двигаться по правой половине проезжей части, за исключением следующего:
(1) При обгоне и обгоне другого транспортного средства, следующего в том же направлении, в соответствии с правилами обгона и обгона .
(2) Когда правая половина проезжей части закрыта для движения в ходе строительства или ремонта.
(3) На проезжей части, разделенной на три (3) размеченные полосы для движения по правилам, применимым к проезжей части, разделенной на три (3) размеченных полосы.
(4) На проезжей части, обозначенной и обозначенной для одностороннего движения.
(b) На всех дорогах транспортное средство, движущееся со скоростью ниже нормальной скорости движения в то время и в существующих условиях, должно двигаться:
(1) по правой полосе, доступной для движения; или
(2) как можно ближе к правому бордюру или краю проезжей части;
, за исключением случаев обгона и обгона другого транспортного средства, следующего в том же направлении, или подготовки к повороту налево на перекрестке или на частной дороге или подъездной дорожке.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-3
Ограничения использования полосы
Сек. 3. (a) Департамент транспорта Индианы может принять правила
, чтобы ограничить движение грузовика определенной полосой или полосами автомагистрали, обслуживаемой штатом, и определенной полосой или полосами улицы города или поселка, который часть государственной системы автомобильных дорог и обслуживается государством.
(b) Департамент транспорта штата Индиана может размещать на автомагистралях штата, городских или городских улицах, являющихся частью системы автомагистралей штата, соответствующие указатели и сигналы.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-4
Транспортные средства, движущиеся в противоположных направлениях; однополосные дороги; прохождение
сек. 4. Лица, управляющие транспортными средствами, движущимися во встречном направлении, должны обгонять друг друга справа.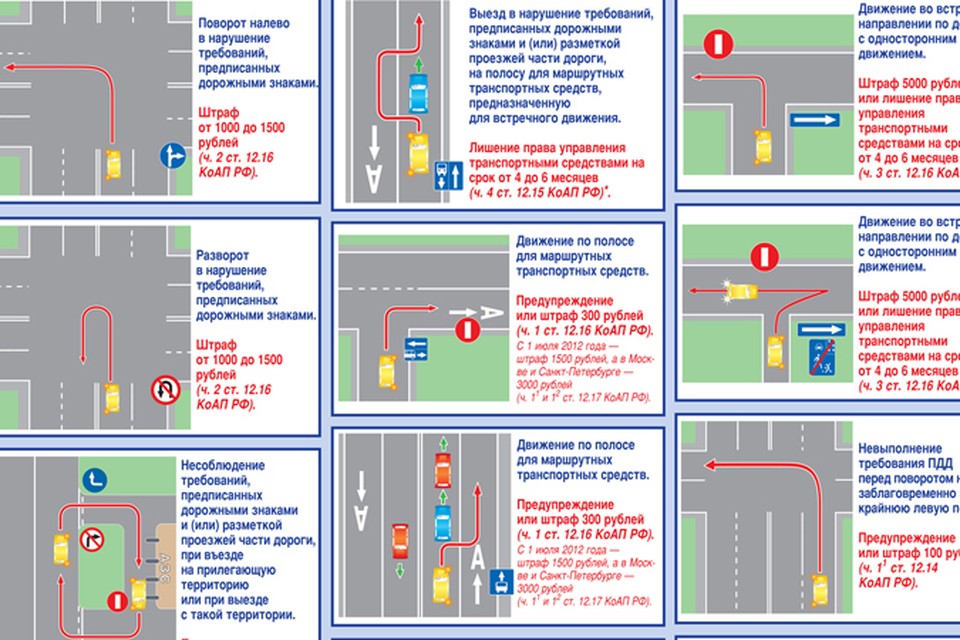 На дорогах шириной не более 1 (одной) полосы движения в каждом направлении каждое лицо, управляющее транспортным средством, подпадающим под действие настоящей статьи, обязано передать другому лицу, управляющему транспортным средством, не менее половины (1/2) как можно ближе к основной проезжей части проезжей части.
На дорогах шириной не более 1 (одной) полосы движения в каждом направлении каждое лицо, управляющее транспортным средством, подпадающим под действие настоящей статьи, обязано передать другому лицу, управляющему транспортным средством, не менее половины (1/2) как можно ближе к основной проезжей части проезжей части.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-5
Обгон и обгон; ограничения; исключения
сек. 5. Следующие правила регулируют обгон и обгон транспортных средств, следующих в том же направлении, с учетом установленных ограничений, исключений и специальных правил:
(1) Лицо, управляющее транспортным средством, которое обгоняет другое транспортное средство, движущееся в том же направлении, слева от другого транспортного средства на безопасном расстоянии и не может снова выехать на правую сторону проезжей части, пока безопасно не уйдет от обгоняемого транспортного средства.
(2) За исключением случаев, когда обгон и обгон справа разрешены, лицо, управляющее обгоняемым транспортным средством, обязано уступить дорогу обгоняющему транспортному средству справа по звуковому сигналу и не может увеличивать скорость обгоняемого транспортного средства до полного обгона. обгоняющим транспортным средством.
обгоняющим транспортным средством.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-6
Обгон и обгон справа; условия
сек. 6. (a) Лицо, управляющее транспортным средством, может обгонять и обгонять справа другое транспортное средство только при следующих условиях:
(1) Когда обгоняемое транспортное средство поворачивает или собирается повернуть налево.
(2) На проезжей части с ровным покрытием и шириной, достаточной для двух (2) или более полос движения транспортных средств, правомерно движущихся в направлении движения обгоняющего транспортного средства.
(b) Лицо, управляющее транспортным средством, может обгонять и обгонять другое транспортное средство справа только при условиях, позволяющих обгон справа в условиях безопасности. Запрещается обгон справа
съездом с проезжей части.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-7
Обгон и обгон слева; условия
сек. 7. Транспортное средство не может двигаться влево от центра проезжей части при обгоне и обгоне другого транспортного средства, следующего в том же направлении, за исключением случаев, когда левая сторона проезжей части хорошо видна и свободна от встречного транспорта на достаточном расстоянии впереди. позволять осуществлять обгон и обгон полностью, не препятствуя безопасному управлению транспортным средством, приближающимся со встречного направления, или обгоняемым транспортным средством. Обгоняющее транспортное средство должно вернуться на правую сторону проезжей части до того, как приблизится на сто (100) футов к транспортному средству, приближающемуся с противоположного направления.
7. Транспортное средство не может двигаться влево от центра проезжей части при обгоне и обгоне другого транспортного средства, следующего в том же направлении, за исключением случаев, когда левая сторона проезжей части хорошо видна и свободна от встречного транспорта на достаточном расстоянии впереди. позволять осуществлять обгон и обгон полностью, не препятствуя безопасному управлению транспортным средством, приближающимся со встречного направления, или обгоняемым транспортным средством. Обгоняющее транспортное средство должно вернуться на правую сторону проезжей части до того, как приблизится на сто (100) футов к транспортному средству, приближающемуся с противоположного направления.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-7.5
Обгон и обгон; рабочая площадка без проходных зон
сек. 7.5. (a) Этот раздел применяется к рабочей площадке:
(1) на шоссе, разделенном на две (2) или более размеченных полосы движения для движения в одном направлении; и
(2), для которых транспортные средства получают указание перестроиться с одной (1) полосы движения на другую полосу движения с помощью соответствующего знака.
(b) Лицо, управляющее транспортным средством, не может обгонять другое транспортное средство, находящееся на полосе движения, на которую направлено движение, в пределах обозначенной запретной зоны, установленной Департаментом транспорта штата Индиана.
Добавлено P.L.75-1999, SEC.2.
ИЦ 9-21-8-8
Движение по левой стороне проезжей части; условия
сек. 8. (a) Этот раздел не применяется к проезжей части с односторонним движением.
(b) Транспортное средство не может двигаться по левой стороне проезжей части при следующих условиях:
(1) При приближении к гребню уклона или на повороте на шоссе, где обзор лица, управляющего транспортным средством на расстоянии, которое создает опасность, если другое транспортное средство может приблизиться с противоположного направления.
(2) При приближении на расстояние ста (100) футов или пересечении перекрестка или железнодорожного переезда.
(3) Когда обзор затруднен при приближении к мосту, виадуку или туннелю на расстояние ста (100) футов.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-9
Улицы с односторонним движением
Сек. 9. Транспортное средство должно двигаться по проезжей части, обозначенной и обозначенной для одностороннего движения, только в указанном направлении.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-10
Поворотные островки безопасности
Сек. 10. Транспортное средство, объезжающее островок с вращающимся движением, должно двигаться только справа от островка с вращающимся движением.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-11
Проезжие части разделены на три или более четко обозначенных полосы; правила
гл. 11. Всякий раз, когда проезжая часть разделена на три (3) или более четко обозначенных полосы для движения, применяются следующие правила: полосе движения до тех пор, пока лицо, управляющее транспортным средством, не убедится в том, что движение может быть выполнено с безопасностью.![]()
(2) На проезжей части, которая разделена на три (3) полосы, транспортное средство не может двигаться по центральной полосе, кроме как при любом из следующих условий: виден, а центральная полоса свободна от движения на безопасном расстоянии.
(B) При подготовке к левому повороту.
(C) Если центральная полоса в это время выделена исключительно для движения транспорта в направлении движения транспортного средства и обозначена указателями, уведомляющими о распределении.
(3) Могут быть установлены официальные знаки, направляющие медленно движущемуся транспорту использовать выделенную полосу или выделяющие определенные полосы для транспортных средств, движущихся в том же направлении. Лицо, управляющее транспортным средством, должно подчиняться указаниям каждого знака.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-12
Автомагистрали между штатами; ограничения использования полосы для грузовых автомобилей
Сек. 12. За исключением случаев обгона более медленного транспортного средства, въезда на автомагистраль или выезда с нее, а также при наличии особой опасности, требующей по соображениям безопасности использования запасной полосы, человеку запрещается управлять грузовиком, седельным тягачом, дорожным тягачом, прицепом. , полуприцеп или прицеп с шестом на автомагистрали между штатами по любой полосе, кроме крайней правой.
12. За исключением случаев обгона более медленного транспортного средства, въезда на автомагистраль или выезда с нее, а также при наличии особой опасности, требующей по соображениям безопасности использования запасной полосы, человеку запрещается управлять грузовиком, седельным тягачом, дорожным тягачом, прицепом. , полуприцеп или прицеп с шестом на автомагистрали между штатами по любой полосе, кроме крайней правой.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-13
Автомагистрали между штатами, имеющие не менее трех полос движения; ограничения использования полосы для грузовых автомобилей
Сек. 13. За исключением случаев въезда на автомагистраль или выезда с нее или наличия особой опасности, требующей по соображениям безопасности использования запасной полосы, человеку запрещается управлять грузовиком, седельным тягачом, дорожным тягачом, прицепом, полуприцепом или прицепом с шестом. на автомагистрали между штатами, состоящей как минимум из трех (3) полос движения в одном (1) направлении в любой полосе, кроме двух (2) крайних правых полос.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-14
Следование за другими транспортными средствами; ограничения по расстоянию
сек. 14. Лицо, управляющее механическим транспортным средством, не может следовать за другим транспортным средством ближе, чем это разумно и предусмотрительно, с должным учетом скорости обоих транспортных средств, временного интервала между транспортными средствами и состояния дороги.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-15
Грузовые автомобили и тягачи с прицепами; следуя за другими грузовиками; ограничения по расстоянию
сек.15. За исключением случаев обгона и обгона, лицо, управляющее грузовым автомобилем, грузовым автомобилем, буксирующим другое транспортное средство, или автопоездом с прицепом, при движении по проезжей части за пределами делового или жилого района или по проезжей части, являющейся частью Система автомагистралей между штатами, будь то в пределах или за пределами делового или жилого района, не может следовать в пределах трехсот (300) футов от другого грузовика, грузовика, тянущего другое транспортное средство, или комбинации тягача и прицепа.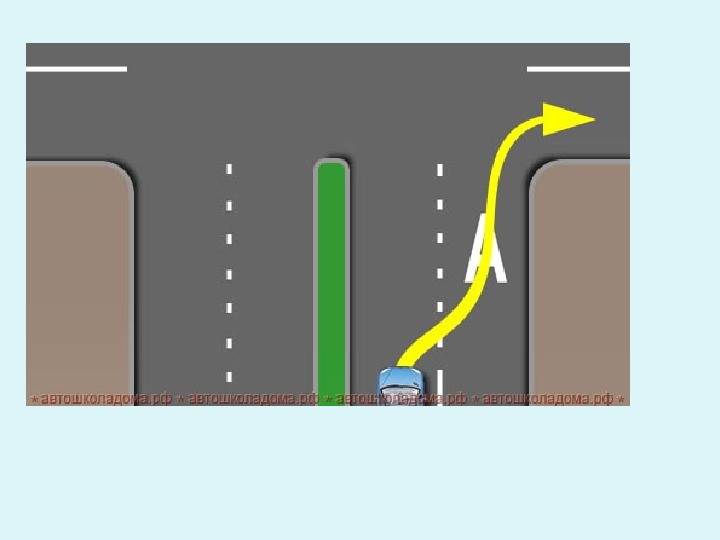
Как добавил П.Л.2-1991, СЕК.9.
IC 9-21-8-16
Караваны и кортежи; расстояние между транспортными средствами; исключения
сек. 16. (a) Этот раздел не применяется к похоронам или марширующим оркестрам.
(b) Транспортные средства, движущиеся по проезжей части за пределами делового или жилого района в автофургоне или кортеже, независимо от того, буксируют ли они другие транспортные средства, должны эксплуатироваться таким образом, чтобы между каждым транспортным средством или комбинацией транспортных средств оставалось достаточно места, чтобы другое транспортное средство могло войти и занять пространство без опасности.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-17
Разделенные дороги; ограничения
сек. 17. Всякий раз, когда шоссе было разделено на две (2) проезжие части посредством:
(1) оставления промежуточного пространства;
(2) физический барьер; или
(3) четко обозначенная разделительная секция, предназначенная для препятствия движению транспортных средств;
транспортное средство должно двигаться только по правосторонней дороге. Транспортное средство не может переезжать, пересекать или находиться внутри разделяющего пространства, барьера или секции, кроме как через отверстие в физическом барьере, разделительной секции или пространстве, или на перекрестке или перекрестке, установленном органами государственной власти.
Транспортное средство не может переезжать, пересекать или находиться внутри разделяющего пространства, барьера или секции, кроме как через отверстие в физическом барьере, разделительной секции или пространстве, или на перекрестке или перекрестке, установленном органами государственной власти.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-18
Объекты с ограниченным доступом; вход и выход в и из
сек. 18. Лицо не может въезжать на транспортное средство или выезжать из него на объект с ограниченным доступом
, за исключением въездов и выездов, установленных органом государственной власти, контролирующим проезжую часть.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-19
Автострады и шоссе между штатами; вход и выход туда и обратно; специальные кроссоверы; «U» получается
сек.19. Лицо не может управлять транспортным средством на автостраде или системе автомагистралей между штатами или с них, за исключением въездов и выездов, установленных государственным органом, контролирующим автомагистраль. Всякий раз, когда специальные перекрестки между основными проезжей частью автострады или системой автомагистралей между штатами предусмотрены только для автомобилей экстренных служб или ремонтного оборудования, система автострад или автомагистралей между штатами должна быть вывешена, запрещающие повороты в форме буквы «U». Лицо, управляющее транспортным средством, за исключением автомобиля экстренной помощи или оборудования для технического обслуживания, не может использовать кроссоверы или делать разворот в любом месте на автостраде или системе автомагистралей между штатами.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-20
Пешеходы, велосипеды и другой немоторизованный транспорт; запрет на использование автомобильных дорог
гл. 20. Департамент транспорта штата Индиана может постановлением или приказом, внесенным в его протокол, а местные власти могут своим постановлением в отношении любой системы автомагистралей или автомагистралей между штатами, находящейся под их соответствующей юрисдикцией, запретить использование шоссе пешеходами, велосипедистами или другим немоторизованным транспортом или лицом, управляющим мотоциклом. Департамент транспорта штата Индиана или местные органы власти, принимающие запрещающие правила, должны установить и поддерживать официальные знаки на автостраде или системе автомагистралей между штатами, к которым применяются правила. Если установлены знаки, лицо не может нарушать ограничения, указанные на знаках.
Департамент транспорта штата Индиана или местные органы власти, принимающие запрещающие правила, должны установить и поддерживать официальные знаки на автостраде или системе автомагистралей между штатами, к которым применяются правила. Если установлены знаки, лицо не может нарушать ограничения, указанные на знаках.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-21
Перекрестки; правый и левый повороты
сек. 21. (a) Лицо, управляющее транспортным средством, которое намеревается повернуть на перекрестке, должно сделать следующее:
(1) Сделать как заход на правый поворот, так и правый поворот как можно ближе к правому бордюру или краю проезжей части.
(2) Выполняйте заход на левый поворот в той части правой половины проезжей части, которая ближе всего к осевой линии проезжей части. После въезда на перекресток лицо, управляющее транспортным средством, должно повернуть налево так, чтобы выехать с перекрестка справа от осевой линии проезжей части, на которую въезжают.
(3) Сделать заход на левый поворот с улицы с двусторонним движением на улицу с односторонним движением в той части правой половины проезжей части, ближайшей к осевой линии проезжей части, и пройти справа от осевой линии, где центральная линия входит в перекресток.
(4) Поверните налево с улицы с односторонним движением на улицу с двусторонним движением
, проехав направо от центральной линии улицы, на которую въезжаете, при выезде с перекрестка.
(5) Если обе улицы или проезжие части имеют одностороннее движение, подход для левого поворота и левого поворота следует выполнять как можно ближе к левому бордюру или краю проезжей части.
(b) Департамент транспорта Индианы и местные власти в их соответствующих юрисдикциях могут распорядиться о размещении маркеров, кнопок или знаков внутри перекрестков или рядом с ними, требующих и предписывающих, чтобы транспортные средства, поворачивающие, двигались по курсу, отличному от указанного в этом разделе. на перекрестке.![]() Когда маркеры, кнопки или знаки размещены в этом подразделе, лицо, управляющее транспортным средством, не может поворачивать транспортное средство на перекрестке, кроме как в соответствии с указаниями и требованиями маркеров, кнопок или знаков.
Когда маркеры, кнопки или знаки размещены в этом подразделе, лицо, управляющее транспортным средством, не может поворачивать транспортное средство на перекрестке, кроме как в соответствии с указаниями и требованиями маркеров, кнопок или знаков.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-22
Классы; движение в противоположном направлении при подходе к гребню
сек. 22. Запрещается поворачивать транспортное средство для движения в противоположном направлении на любом повороте, на подходе или вблизи гребня уклона, где транспортное средство не может видеть лицо, управляющее любым другим транспортным средством, приближающимся с в любом направлении в пределах семисот пятидесяти (750) футов.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-23
Запуск остановленного, стоящего или припаркованного автомобиля
Сек. 23. Человек не может запускать транспортное средство, которое остановлено, стоит или припарковано, пока движение не может быть выполнено с разумной безопасностью.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-24
Замедление, поворот с прямого курса и перестроение; производительность с разумной безопасностью; сигнал
Сек.24. Человеку запрещается:
(1) замедлять или останавливать транспортное средство;
(2) поворачивать транспортное средство с прямого курса на шоссе; или
(3) переход с одной (1) полосы движения на другую;
, если перемещение не может быть выполнено с разумной безопасностью. Перед выполнением движения, описанного в этом разделе, лицо должно подать отчетливо слышимый сигнал, подав звуковой сигнал, если движение может затронуть пешехода, и подать соответствующий сигнал остановки или поворота в порядке, предусмотренном в разделах 27-28 настоящей главы. если какое-либо другое транспортное средство может быть затронуто движением.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-25
Сигналы поворота
Сек. 25. Сигнал о намерении повернуть направо или налево должен подаваться непрерывно в течение не менее последних двухсот (200) футов, пройденных транспортным средством перед поворотом или перестроением. Транспортное средство
25. Сигнал о намерении повернуть направо или налево должен подаваться непрерывно в течение не менее последних двухсот (200) футов, пройденных транспортным средством перед поворотом или перестроением. Транспортное средство
, движущееся в зоне скорости не менее пятидесяти (50) миль в час, должно непрерывно подавать сигнал в течение не менее последних трехсот (300) футов, пройденных транспортным средством, перед поворотом или сменой полосы движения.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-26
Остановка или резкое снижение скорости; сигнал
Сек. 26. Лицо не вправе останавливать или резко снижать скорость транспортного средства без предварительного подачи соответствующего сигнала лицу, которое при наличии возможности подать сигнал немедленно ведет транспортное средство назад.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-27
Сигналы остановки или поворота; сигналы рукой или рукой; сигнальные лампы; исключение для сельскохозяйственной техники; проезд по шоссе
сек. 27. (a) За исключением случаев, предусмотренных в подразделе (b), сигнал остановки или поворота, требуемый в соответствии с настоящей главой, может подаваться с помощью руки или руки, сигнальной лампы или ламп или механического сигнального устройства.
27. (a) За исключением случаев, предусмотренных в подразделе (b), сигнал остановки или поворота, требуемый в соответствии с настоящей главой, может подаваться с помощью руки или руки, сигнальной лампы или ламп или механического сигнального устройства.
(b) Этот подраздел не применяется к сельскохозяйственным тракторам и сельскохозяйственным орудиям, предназначенным для работы в основном на сельскохозяйственных полях или на фермах. Моторное транспортное средство, используемое на шоссе, должно быть оборудовано сигнальной лампой или сигнальными лампами или механическим сигнальным устройством, а требуемый сигнал должен подаваться при наличии любого из следующих условий:
(1) Расстояние от центра верхней части расстояние от рулевой стойки до левой внешней границы кузова, кабины или груза автомобиля превышает двадцать четыре (24) дюйма.
(2) Расстояние от центра верхней части рулевой стойки до заднего края кузова или груза автомобиля превышает четырнадцать (14) футов. Это измерение применяется к одному транспортному средству и комбинации транспортных средств.
Добавлено P.L.2-1991, SEC.9. Изменено PL 210-2005, SEC.33.
IC 9-21-8-28
Сигналы руками и руками; налево; направо; снижение скорости
сек. 28. Все сигналы, требуемые в соответствии с этой главой, могут подаваться рукой.Сигнал, подаваемый в соответствии с настоящим разделом, должен подаваться с левой стороны транспортного средства следующим образом:
(1) Поворот налево обозначается вытягиванием кисти и руки горизонтально.
(2) Правый поворот обозначается вытягиванием кисти и руки вверх.
(3) Об остановке или снижении скорости свидетельствует вытягивание кисти и руки вниз.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-29
Перекрестки; транспортные средства, приближающиеся с разных магистралей; выход полосы отчуждения сек.29. За исключением подъезда к автомагистралям и районам, на которых вывешены знаки, дающие другие указания, когда два (2) транспортных средства приближаются или въезжают на перекресток с разных автомагистралей примерно в одно и то же время, лицо, управляющее транспортным средством слева, должно уступить дорогу. право проезда к транспортному средству справа.
право проезда к транспортному средству справа.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-30
Перекрестки; транспортные средства, приближающиеся с противоположных сторон; выход полосы отчуждения
сек.30. Лицо, управляющее транспортным средством в пределах перекрестка с намерением повернуть налево, должно уступить дорогу транспортному средству, приближающемуся с противоположного направления, которое находится в пределах перекрестка или так близко к перекрестку, что представляет собой непосредственную опасность. . Уступив дорогу и подав сигнал в соответствии с требованиями настоящей главы, лицо, управляющее транспортным средством, может совершить левый поворот, а лица, управляющие другими транспортными средствами, приближающимися к перекрестку со встречного направления, обязаны уступить право проезда транспортному средству, совершающему поворот. левый поворот.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-31
Въезд на сквозные магистрали; остановка; выход полосы отчуждения
сек. 31. (a) Лицо, управляющее транспортным средством, должно делать следующее:
31. (a) Лицо, управляющее транспортным средством, должно делать следующее:
(1) Остановиться в соответствии с требованиями настоящей статьи на въезде на сквозную дорогу.
(2) Уступайте дорогу другим транспортным средствам, которые въехали на перекресток со сквозного шоссе или приближаются к перекрестку так близко, что представляют непосредственную опасность.
(b) После уступки, как описано в подразделе (а)(2), лицо, управляющее транспортным средством, может продолжить движение, а лица, управляющие другими транспортными средствами, приближающимися к перекрестку на сквозной дороге, должны уступить право проезда движущемуся транспортному средству. в или через сквозное шоссе.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-32
Знаки остановки на перекрестках; обязанность подчиняться
сек. 32. Лицо, управляющее транспортным средством, обязано остановиться на перекрестке, где установлен знак «стоп» на одном (1) или нескольких въездах на сквозную автомобильную дорогу, не являющуюся частью сквозной автомобильной дороги, и двигаться осторожно, уступая дорогу транспортным средствам, не входящим в состав сквозной автомобильной дороги.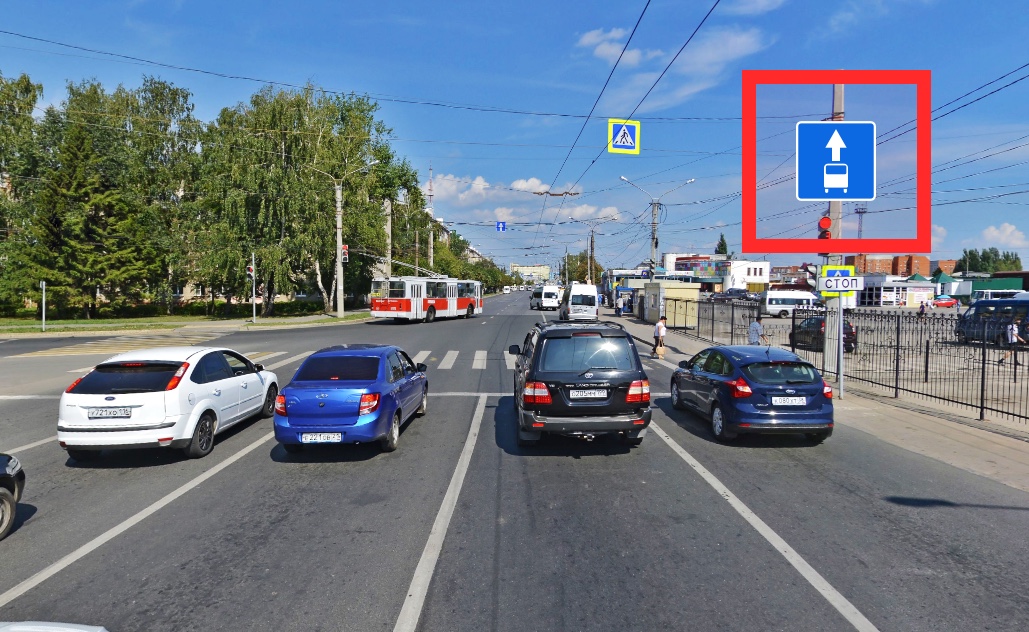 требуется остановиться.
требуется остановиться.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-33
Знаки доходности; наезд на пешехода или транспортное средство
Сек. 33. (a) Лицо, управляющее транспортным средством, которое приближается к знаку уступки, должно снизить скорость до скорости, разумной для существующих условий, или остановиться, если это необходимо. Лицо должно уступить право проезда
пешеходу, законно пересекающему проезжую часть, и транспортному средству, находящемуся на перекрестке или приближающемуся к другому шоссе так близко, что представляет непосредственную опасность.Уступив дорогу, человек может продолжить движение, а все другие транспортные средства, приближающиеся к перекрестку, должны уступить дорогу движущемуся транспортному средству.
(b) Если лицо, управляющее транспортным средством, вовлечено в столкновение с пешеходом на пешеходном переходе или транспортным средством на перекрестке после того, как проехало мимо знака «уступи дорогу» без остановки, столкновение считается доказательством prima facie того, что это лицо не уступило дорогу право проезда.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-34
Въезд на шоссе с частной дороги или подъездной дороги; выход полосы отчуждения
сек.34. Лицо, управляющее транспортным средством, которое собирается въехать на автомагистраль или пересечь ее с частной дороги или проезда, обязано уступить дорогу всем транспортным средствам, приближающимся к автомагистрали.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-35
Автомобили скорой помощи; выход полосы отчуждения
сек. 35. (a) При непосредственном приближении уполномоченного транспортного средства экстренной помощи, когда лицо, управляющее уполномоченным аварийно-спасательным транспортным средством, подает звуковой сигнал сиреной или показывает попеременно мигающие красные, красные и белые или красные и синие огни, лицо, управляющее другое транспортное средство должно сделать следующее, если иное не указано сотрудником правоохранительных органов:
(1) Уступить дорогу.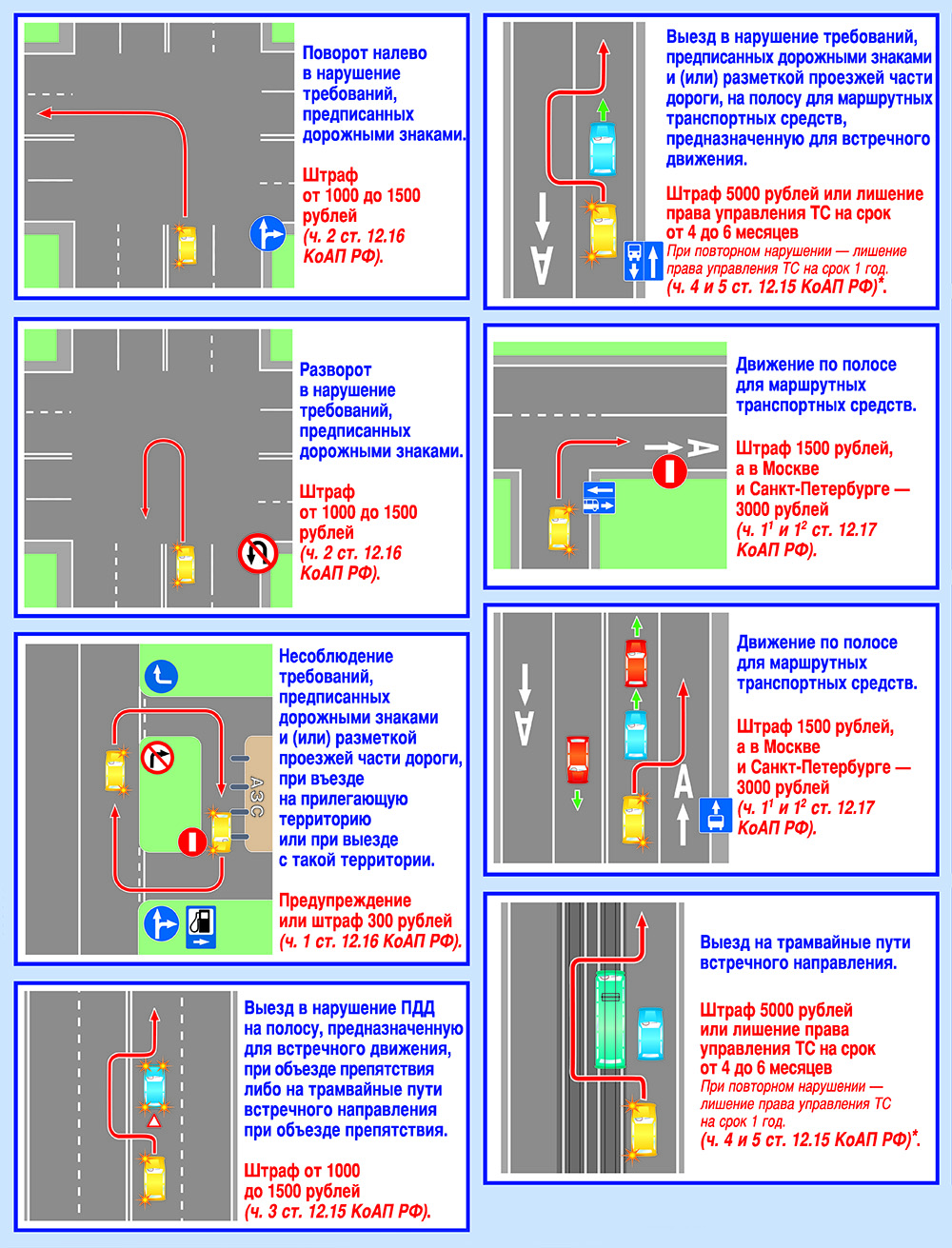
(2) Немедленно двигайтесь параллельно и как можно ближе к правому краю или обочине шоссе вдали от перекрестков.
(3) Остановитесь и оставайтесь в этом положении до тех пор, пока не проедет разрешенный аварийный автомобиль.
(b) При приближении к стоящему официальному транспортному средству экстренной помощи, когда уполномоченное аварийное транспортное средство подает сигнал, показывая попеременно мигающие красные, красные и белые или красные и синие огни, лицо, управляющее приближающимся транспортным средством, должно:
(1) действуя с должной осторожностью, уступить дорогу, изменив полосу движения на полосу, не примыкающую к полосе движения разрешенного транспортного средства экстренной помощи, если это возможно с должным учетом безопасности и условий движения, если на шоссе имеется не менее четырех ( 4) полосы с не менее чем двумя (2) полосами движения в том же направлении, что и приближающееся транспортное средство; или
(2) действуя с должной осторожностью, снизить скорость транспортного средства до скорости, по крайней мере, на десять (10) миль в час меньше, чем установленное ограничение скорости, поддерживая безопасную скорость для дорожных условий, если перестроение невозможно или небезопасно.
(c) При приближении к стационарному ремонтно-эвакуационному транспортному средству, стационарному транспортному средству коммунальной службы (как определено в IC 8-1-8.3-5) или стационарному транспортному средству для обслуживания дорог, улиц или шоссе, когда транспортное средство
дает сигнал путем включения попеременно мигающих желтых огней, лицо, управляющее приближающимся транспортным средством, должно:
(1) действовать с должной осторожностью, уступить право проезда, изменив полосу движения на полосу, не примыкающую к полосе эвакуационного транспортного средства, служебное транспортное средство или транспортное средство для обслуживания дорог, улиц или шоссе, если это возможно с учетом безопасности и условий движения, если на шоссе, имеющем не менее четырех (4) полос движения и не менее двух (2) полос движения в одном и том же направление как приближающееся транспортное средство; или
(2) действуя с должной осторожностью, снизить скорость транспортного средства до скорости, по крайней мере, на десять (10) миль в час меньше, чем установленное ограничение скорости, поддерживая безопасную скорость для дорожных условий, если перестроение невозможно или небезопасно.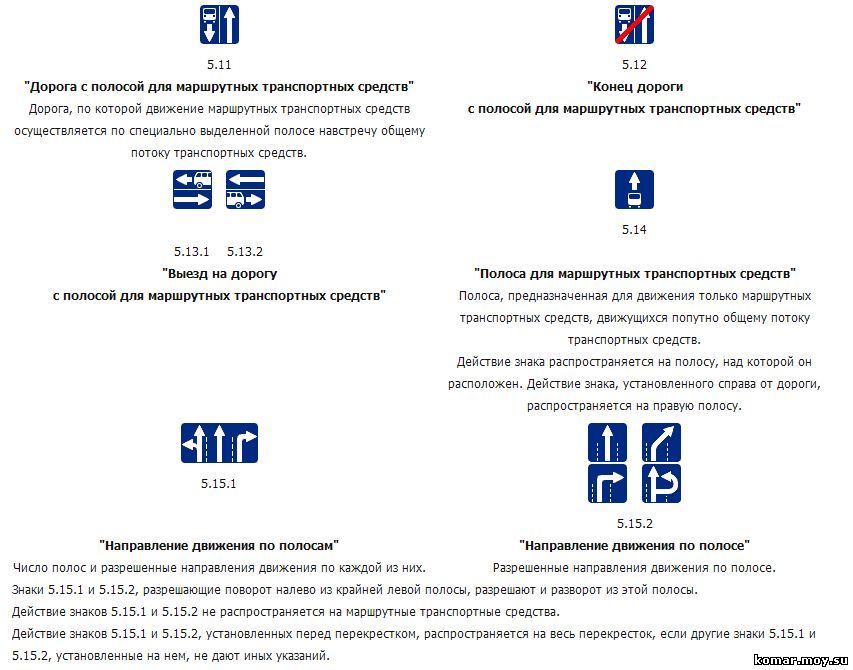
(d) Этот раздел не освобождает лицо, которое управляет разрешенным аварийно-спасательным транспортным средством, эвакуационным транспортным средством, коммунальным транспортным средством или транспортным средством для обслуживания дорог, улиц или шоссе, от обязанности управлять транспортным средством с должным учетом безопасность всех лиц, пользующихся дорогой.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.18-1999, SEC.1; P.L.39-2000, SEC.7; П.Л.1-2001, СЕК.6; П.Л.14-2010, СЕК.1.
ИЦ 9-21-8-36
Сигналы управления движением не работают
Сек.36. За исключением случаев, предусмотренных в IC 9-21-17-8 и IC 9-21-3-7(b)(4)(C), когда светофоры не установлены или не работают, лицо, управляющее транспортное средство уступает право преимущественного проезда, снижая скорость или останавливаясь, если необходимо уступить, пешеходу, пересекающему проезжую часть в пределах пешеходного перехода, когда пешеход находится на половине проезжей части, по которой движется транспортное средство, или когда пешеход приближаясь вплотную с противоположной половины проезжей части.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.43-2011, SEC.5.
ИЦ 9-21-8-37
Пешеходы и дети; соответствующее отношение; осторожность
сек. 37. Невзирая на другие положения настоящей статьи или местного постановления, лицо, управляющее транспортным средством, обязано:
(1) Соблюдать должную осторожность, чтобы избежать столкновения с пешеходом или лицом, управляющим транспортным средством, приводимым в движение человеком, подачей звукового сигнала. когда необходимо.
(2) Соблюдайте надлежащую осторожность при наблюдении за ребенком или явно сбитым с толку, недееспособным или пьяным человеком.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-38
Зоны безопасности
Сек. 38. Транспортное средство не может двигаться через или в пределах зоны безопасности.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-39
Железнодорожные переезды
Разд. 39. Всякий раз, когда лицо, управляющее транспортным средством, приближается к железнодорожному переезду, оно должно остановиться в пределах пятидесяти (50) футов, но не менее пятнадцати (15) футов от ближайшего железнодорожного пути и не может продолжать движение, пока это лицо не сможет так безопасно при следующих обстоятельствах:
39. Всякий раз, когда лицо, управляющее транспортным средством, приближается к железнодорожному переезду, оно должно остановиться в пределах пятидесяти (50) футов, но не менее пятнадцати (15) футов от ближайшего железнодорожного пути и не может продолжать движение, пока это лицо не сможет так безопасно при следующих обстоятельствах:
(1) Когда хорошо видимый электрический или механический сигнальный прибор предупреждает о немедленном приближении поезда или другого оборудования на пути.
(2) Когда шлагбаум опускается или когда сигнальщик-человек подает или продолжает подавать сигнал о приближении или прохождении поезда или другого оборудования на пути.
(3) Когда железнодорожный поезд или другое находящееся на пути оборудование, приближающееся на расстояние одной тысячи пятисот (1500) футов к перекрестку с автомагистралью, издает звуковой сигнал и из-за скорости или близости к перекрестку представляет собой непосредственную опасность.
(4) Когда приближающийся поезд или другое оборудование на пути хорошо видны и находятся в опасной близости от переезда.
Добавлено P.L.2-1991, SEC.9. Изменено PL119-1995, SEC.6; П.Л.8-2010, СЕК.3.
IC 9-21-8-40
Тяжелое оборудование или конструкции; железнодорожные переезды; уведомление; процедура
сек. 40. (a) Лицо не может управлять или перемещать гусеничный трактор, паровой экскаватор, вышку, каток или любое оборудование или конструкцию весом более десяти (10) тонн и с нормальной рабочей скоростью не более шести (6) миль в час или вертикальный кузов или грузовой просвет менее девяти (9) дюймов над ровной поверхностью проезжей части на или поперек путей на железнодорожном переезде без предварительного соблюдения требований настоящего раздела.
(b) Уведомление о предполагаемом пересечении в соответствии с настоящим разделом должно быть передано начальнику железной дороги, и железной дороге должно быть предоставлено разумное время для обеспечения надлежащей защиты на пересечении.
(c) Прежде чем совершить переход в соответствии с настоящим разделом, лицо, управляющее или перемещающее транспортное средство или оборудование, описанное в подразделе (a), должно сначала остановить транспортное средство или оборудование на расстоянии не менее десяти (10) футов и не более пятидесяти (50) футов. футов от ближайшего рельса или железной дороги. Во время остановки человек должен слушать и смотреть в обоих направлениях вдоль пути на предмет приближающегося поезда или другого путевого оборудования, а также сигналов, указывающих на приближение поезда или другого путевого оборудования.Человек не должен продолжать движение до тех пор, пока переход не будет безопасным.
футов от ближайшего рельса или железной дороги. Во время остановки человек должен слушать и смотреть в обоих направлениях вдоль пути на предмет приближающегося поезда или другого путевого оборудования, а также сигналов, указывающих на приближение поезда или другого путевого оборудования.Человек не должен продолжать движение до тех пор, пока переход не будет безопасным.
(d) Переход не может быть осуществлен, когда автоматический сигнал, шлагбаумы, флагман или иное предупреждение о непосредственном приближении железнодорожного поезда или другого оборудования на пути подается автоматически.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.8-2010, SEC.4.
ИЦ 9-21-8-41 Устройства управления дорожным движением; выполнение инструкций; дорожные работы; исключительный уход; средства управления безопасностью
Сек.41. (a) Лицо, управляющее транспортным средством или трамваем, не может не подчиняться инструкциям официального устройства управления дорожным движением, установленного в соответствии с настоящей статьей, если иное не указано сотрудником полиции.
(b) Когда устройство управления дорожным движением или флагман используется на рабочей площадке на шоссе для управления дорожным движением, лицо, управляющее транспортным средством, должно проявлять исключительную осторожность для обеспечения взаимной безопасности всех людей и транспортных средств на рабочей площадке.
(c) Весь транспорт должен соблюдать и подчиняться устройствам управления дорожным движением, включая сигналы, знаки и предупреждения, а также всем направлениям, знакам или предупреждающим устройствам, которые могут быть даны или показаны сотрудником полиции или флагманом для безопасного управления движением на рабочей площадке. и содействовать безопасности на рабочем месте.
Добавлено P.L.2-1991, SEC.9.
ИЦ 9-21-8-41.5
Транспортное средство въезжает в зону пересечения школы; выполнение инструкций
сек. 41.5. (a) Лицо, управляющее транспортным средством, должно подчиняться указаниям школьного охранника и останавливать транспортное средство перед въездом в зону школьного перехода.
(b) Всякий раз, когда лицо, управляющее транспортным средством, приближается к зоне пересечения школы, это лицо должно проявлять особую осторожность для обеспечения безопасности детей в зоне пересечения школы.
Добавлено P.L.116-1993, SEC.3.
ИЦ 9-21-8-41.7
Обязанность машиниста повиноваться указаниям флагмана железной дороги
Разд. 41.7. (a) Для целей настоящего раздела «железнодорожный флагман» означает лицо, обеспечивающее охрану флага в соответствии с правилами перевозчика.
(b) Лицо, управляющее транспортным средством, должно подчиняться указаниям железнодорожного флагмана об остановке транспортного средства перед приближением к месту, где находится или может находиться поезд или другое оборудование на пути.
Добавлено P.L.8-2010, SEC.5. Изменено P.L.50-2011, SEC.4.
ИЦ 9-21-8-42
Тротуары; приближаясь с переулка, подъезда или здания
Сек. 42. Лицо, управляющее транспортным средством в пределах делового или жилого района, выходящего из переулка, подъездной дорожки или здания, должно остановить транспортное средство непосредственно перед выездом на тротуар или в зону тротуара, пересекающую переулок или частную подъездную дорожку. .
42. Лицо, управляющее транспортным средством в пределах делового или жилого района, выходящего из переулка, подъездной дорожки или здания, должно остановить транспортное средство непосредственно перед выездом на тротуар или в зону тротуара, пересекающую переулок или частную подъездную дорожку. .
Как добавил П.Л.2-1991, СЕК.9.
ИЦ 9-21-8-43
Грузовые автомобили; пассажиры; затруднение обзора; вмешательство в управление транспортным средством
Сек. 43. (a) Лицо не может управлять транспортным средством при наличии любого из
следующих условий:
(1) Транспортное средство:
(A) загружено определенным образом; или
(B) на переднем сиденье находится более трех (3) человек;
таким образом, чтобы загораживать человеку, управляющему транспортным средством, обзор спереди или по бокам транспортного средства.
(2) Транспортное средство:
(A) загружено таким образом; или
(B) на переднем сиденье находится более трех (3) человек;
, чтобы помешать человеку управлять приводным механизмом транспортного средства.
(b) Пассажир в транспортном средстве или трамвае не может делать следующее:
(1) Ехать в положении, которое мешает обзору вперед или по сторонам от лица, управляющего транспортным средством или трамваем.
(2) Препятствовать управлению человеком приводным механизмом транспортного средства или трамвая.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.1-1991, SEC.96.
IC 9-21-8-44
Движение накатом в нейтральном положении при движении на спуске; запрет
сек. 44. (a) Лицо, управляющее автомобилем, не может двигаться по инерции с включенными передачами транспортного средства в нейтральном положении при движении по спуску.
(b) Лицо, управляющее коммерческим транспортным средством, не может двигаться накатом с выключенным сцеплением при движении по спуску.
Как добавил П.Л.2-1991, СЕК.9.
IC 9-21-8-44.5
Моторные тормоза с компрессией
Сек. 44.5. (a) В данном разделе термин «компрессионный моторный тормоз» означает устройство с гидравлическим приводом, которое преобразует мощность дизельного двигателя в тормозной механизм, поглощающий мощность.
44.5. (a) В данном разделе термин «компрессионный моторный тормоз» означает устройство с гидравлическим приводом, которое преобразует мощность дизельного двигателя в тормозной механизм, поглощающий мощность.
(b) Лицо, которое управляет автомобилем, оборудованным моторными тормозами с компрессионным двигателем, по платной дороге штата Индиана в округе с населением более ста пятидесяти тысяч (150 000), но менее ста семидесяти тысяч (170 000), не может вместо рабочей тормозной системы использовать моторные тормоза автомобиля с компрессионным расцепителем, за исключением случаев выхода из строя рабочей тормозной системы.
Добавлено P.L.23-2001, SEC.2. Изменено P.L.1-2002, SEC.42; П.Л.119-2012, СЕК.104.
ИЦ 9-21-8-45
Вагоны сельскохозяйственные; межгосударственные и государственные автомагистрали; запреты
сек. 45. (a) Фермерский фургон не может эксплуатироваться на автомагистралях между штатами.
(b) В дополнение к запрету, изложенному в подразделе (a), сельскохозяйственный фургон (согласно определению в IC 9-13-2-60(a)(2)) не может эксплуатироваться на шоссе
, обозначенном как часть государственной автомагистрали в соответствии с IC 8-23-4-2, за исключением того, что сельскохозяйственный фургон может пересекать государственную автомагистраль, кроме автомагистрали с ограниченным доступом, под прямым углом с целью выезда с одного (1) сельскохозяйственного поля к другому, когда операция может быть выполнена безопасно.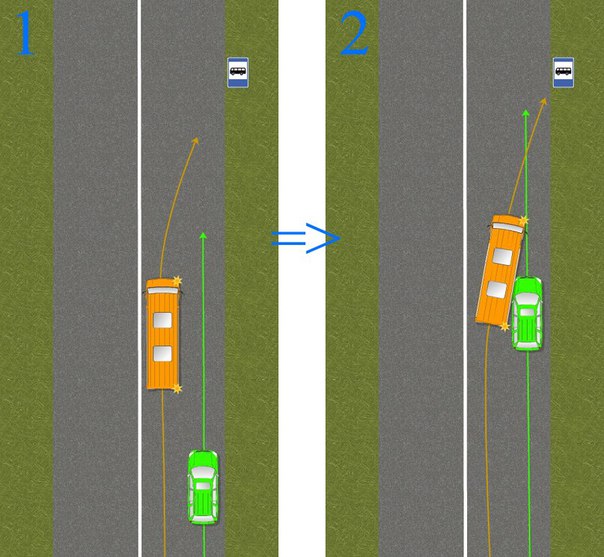 Оператор должен полностью остановить сельскохозяйственный фургон перед тем, как продолжить движение по государственной дороге, и должен уступить право проезда всем транспортным средствам.
Оператор должен полностью остановить сельскохозяйственный фургон перед тем, как продолжить движение по государственной дороге, и должен уступить право проезда всем транспортным средствам.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.150-2009, SEC.13.
ИЦ 9-21-8-46
С/х орудия на межгосударственных автодорогах
Сек. 46. Лицо не может управлять или эксплуатировать:
(1) сельскохозяйственное орудие, предназначенное для работы в основном на поле или на ферме; или
(2) единица специальной техники;
на любом участке автомагистрали между штатами.
Добавлено P.L.2-1991, SEC.9. Изменено PL 210-2005, SEC.34.
IC 9-21-8-47
Транспортные средства, которые должны эксплуатироваться во избежание повреждения автомобильных дорог или помех движению транспорта
Сек. 47. Следующие транспортные средства должны перемещаться или эксплуатироваться во избежание любого материального ущерба шоссе или необоснованного вмешательства в движение другого шоссе:
(1) Машины или оборудование, используемые при строительстве или обслуживании шоссе Департаментом транспорта штата Индиана, округами, или муниципалитеты.
(2) Сельскохозяйственные дренажные машины.
(3) Сельскохозяйственные орудия.
(4) Противопожарное оборудование, принадлежащее или эксплуатируемое политическим подразделением или добровольной пожарной частью (как определено в IC 36-8-12-2).
(5) Сельскохозяйственные транспортные средства, загруженные сельскохозяйственной продукцией.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.1-1999, SEC.31; PL210-2005, SEC.35.
IC 9-21-8-48
Транспортные средства с убегающим содержимым; запрет на эксплуатацию; исключения
сек.48. Транспортное средство, кроме:
(1) транспортное средство, перевозящее домашнюю птицу или скот на рынок; или
(2) транспортное средство для обслуживания дорог, занятое разбрасыванием песка или химикатов против обледенения;
нельзя управлять или перемещать по шоссе, если содержимое транспортного средства капает, просеивается, протекает или иным образом вытекает из транспортного средства.
Добавлено P.L.2-1991, SEC.9. Изменено PL79-1991, SEC.4.
ИК 9-21-8-49
Нарушения; Нарушение класса C сек.49. За исключением случаев, предусмотренных в разделах 50, 51, 52, 54, 55, 56 и 58 этой главы, лицо, нарушающее эту главу, совершает нарушение класса C.
Добавлено P.L.2-1991, SEC.9. Изменено P.L.18-1999, SEC.2; П.Л.40-2007, СЕК.4; П.Л.65-2010, СЕК.4.
ИЦ 9-21-8-50
Безрассудная эксплуатация тягача с прицепом; Проступок класса B
Сек. 50. Лицо, управляющее автопоездом с прицепом в безрассудной или преднамеренной попытке:
(1) поставить под угрозу безопасность или имущество других лиц; или
(2) заблокировать надлежащий поток трафика;
совершает проступок класса B.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-51
Ослепляющие огни; невозможность затемнения; Нарушение класса B
Разд. 51. Лицо, которое:
51. Лицо, которое:
(1) управляет транспортным средством; и
(2) не приглушает яркий или ослепляющий свет при встрече с другим транспортным средством или пешеходом;
совершает нарушение класса B.
Добавлено P.L.2-1991, SEC.9.
IC 9-21-8-52
Опасное вождение; объезд школьного автобуса с вытянутым стопором; штраф; приостановление действия лицензии
сек.52. (a) Лицо, которое управляет транспортным средством и которое безрассудно:
(1) едет с такой неоправданно высокой скоростью или с такой неоправданно низкой скоростью при обстоятельствах, которые:
(A) угрожают безопасности или собственность других лиц; или
(B) заблокировать надлежащий поток трафика;
(2) обгоняет другое транспортное средство сзади на склоне или на повороте, где обзор затруднен на расстоянии менее пятисот (500) футов впереди;
(3) въезжает в полосу движения и выезжает из нее, если не разрешено иное; или
(4) увеличивает скорость или отказывается уступить половину (1/2) проезжей части водителю, совершающему обгон и желающему проехать;
совершает проступок класса B.
(b) Лицо, управляющее транспортным средством и неосторожно обгоняющее школьный автобус, остановившийся на проезжей части, когда сигнальное устройство, указанное в IC 9-21-12-13, находится в выдвинутом положении, совершает мисдиминор класса B. Однако правонарушение является мисдиминором класса А, если оно причиняет телесные повреждения человеку.
(c) Если правонарушение, предусмотренное подразделом (a) или (b), приводит к повреждению имущества другого лица или телесным повреждениям другого лица, суд рекомендует приостановить действие действующих водительских прав
лица на фиксированный срок:
(1) не менее 30 (тридцати) дней; и
(2) не более одного (1) года.
Добавлено P.L.2-1991, SEC.9. Изменено PL127-1993, SEC.1; П.Л.1-2005, СЕК.103; П.Л.70-2009, СЕК.3.
ИЦ 9-21-8-53
Нарушения скорости; жалоба или заявление; вызов, ордер или уведомление; содержание; халатность
сек. 53. (a) В каждом обвинении в нарушении правил скорости в соответствии с этой статьей, в жалобе или показаниях под присягой, а также в повестке, ордере или уведомлении о явке должно быть указано следующее:
(1) Скорость, с которой обвиняемый якобы проехали.
(2) prima facie или фиксированная скорость, применимая в районе или на месте.
(b) Положения настоящей статьи, объявляющие или предусматривающие фиксированные и prima facie ограничения скорости, не могут толковаться как освобождающие истца в гражданском иске от бремени доказывания небрежности со стороны ответчика как непосредственной причины ущерба. предполагаемый.
Добавлено P.L.2-1991, SEC.9.
ИК 9-21-8-54
Штраф за неправильный подход к стоящей машине МЧС
Сек.54. (a) Лицо, нарушающее раздел 35(b) или раздел 35(c) настоящей главы, совершает нарушение класса А.
(b) Если нарушение раздела 35(b) настоящей главы приводит к повреждению имущества другого лица, в дополнение к любому другому наложенному штрафу, суд должен рекомендовать приостановить водительские права этого лица на установленный период не менее 90 (девяноста) дней и не более 1 (одного) года.
(c) Если нарушение раздела 35(c) настоящей главы приводит к повреждению имущества другого лица в размере не менее двухсот пятидесяти долларов (250 долларов США) в дополнение к любому другому наложенному штрафу, суд должен рекомендовать водительские права человека приостанавливаются на установленный срок не менее 90 (девяноста) дней и не более 1 (одного) года.
(d) Если нарушение раздела 35(b) или раздела 35(c) настоящей главы приводит к травме другого лица, в дополнение к любому другому наложенному наказанию, суд должен рекомендовать приостановить водительские права этого лица на определенный срок. установленный срок не менее 180 (сто восьмидесяти) дней и не более 2 (двух) лет.
(e) Если нарушение раздела 35(b) или раздела 35(c) настоящей главы приводит к смерти другого лица, в дополнение к любому другому назначенному наказанию, суд должен рекомендовать приостановить действие водительских прав этого лица на два (2) года.
(f) Бюро должно после получения записи судебного решения, вынесенного против лица в соответствии с настоящим разделом:
(1) приостановить водительские права человека на обязательный период; или (2) продлить срок существующей приостановки на фиксированный период;
не менее 90 (девяноста) дней и не более 2 (двух) лет. Бюро устанавливает этот срок в соответствии с рекомендацией суда, вынесшего решение.
Добавлено P.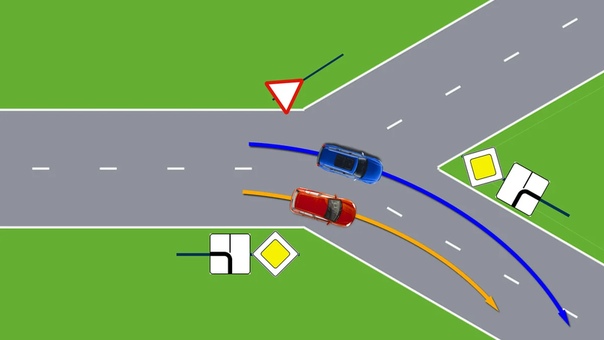 L.18-1999, SEC.3. Изменено П.Л.39-2000, СЕК.8.
L.18-1999, SEC.3. Изменено П.Л.39-2000, СЕК.8.
IC 9-21-8-55
Агрессивное вождение
Сек. 55. (a) Этот раздел не применяется к сотруднику правоохранительных органов, выполняющему официальные обязанности сотрудника правоохранительных органов.
(b) Для целей настоящего раздела лицо участвует в агрессивном вождении, если в течение одного (1) эпизода непрерывного вождения транспортного средства оно делает или совершает по крайней мере три (3) из следующих действий:
(1) Слишком близкое преследование транспортного средства в нарушение IC 9-21-8-14.
(2) Небезопасная эксплуатация транспортного средства с нарушением IC 9-21-8-24.
(3) Обгон другого транспортного средства справа путем выезда за пределы проезжей части в нарушение IC 9-21-8-6.
(4) Небезопасная остановка или замедление транспортного средства в нарушение IC 9-21-8-26.
(5) Ненужное звучание сирены в нарушение IC 9-19-5-2.
(6) Неудача в нарушение IC 9-21-8-29 — IC 9-21-8-34.
(7) Неподчинение устройству управления дорожным движением в нарушение IC 9-21-8-41.
(8) Вождение с небезопасной скоростью в нарушение IC 9-21-5.
(9) Многократное мигание фарами автомобиля.
(c) Лицо, которое с намерением беспокоить или запугать человека в другом транспортном средстве, сознательно или преднамеренно участвует в агрессивном вождении, совершает агрессивное вождение, мисдиминор класса А, за исключением случаев, предусмотренных в IC 9-21-8-56 ( г), (е), (ж) и (з).
Добавлено P.L.75-2006, SEC.2. Изменено P.L.40-2007, SEC.5.
ИЦ 9-21-8-56
Дорожные рабочие зоны; штрафы за нарушения
гл.56. (a) Для целей настоящего раздела «рабочая зона на шоссе» имеет значение, установленное в IC 8-23-2-15.
(b) За исключением случаев, предусмотренных в подразделах (f)–(h), лицо, которое неосторожно управляет транспортным средством в непосредственной близости от рабочей зоны автомагистрали в присутствии рабочих, совершает мисдиминор класса А.
(c) За исключением случаев, предусмотренных в подразделах (f)–(h), лицо, которое сознательно, преднамеренно или по неосторожности управляет автотранспортным средством в непосредственной близости от рабочей зоны шоссе, в присутствии рабочих, с намерением:
( 1) повредить устройства управления движением; или
(2) нанесение телесных повреждений работнику;
совершает проступок класса А.
(d) За исключением случаев, предусмотренных в пунктах (f)–(h), лицо
, которое сознательно, преднамеренно или по неосторожности занимается:
(1) агрессивным вождением, как это определено в разделе 55 настоящей главы; или
(2) соревнования на скорость, запрещенные в соответствии с IC 9-21-6-1;
в непосредственной близости от рабочей зоны автомагистрали в присутствии рабочих совершает правонарушение класса А.
(e) За исключением случаев, предусмотренных в пунктах (f)–(h), лицо, которое по опрометчивости не подчиняется устройству управления дорожным движением или флагману, что запрещено в соответствии со статьей 41 настоящей главы, в непосредственной близости от рабочей зоны шоссе, когда работники совершают правонарушение класса А.
(f) Правонарушение, предусмотренное подразделом (b), (c), (d) или (e), является фелонией класса D, если лицо, совершившее преступление: предыдущие пять (5) лет; или
(2) эксплуатирует транспортное средство с нарушением IC 9-30-5-1 или IC 9-30-5-2.
(g) Правонарушение, предусмотренное подразделом (b), (c), (d) или (e), является фелонией класса D, если правонарушение приводит к телесным повреждениям работника на рабочем месте.
(h) Правонарушение, предусмотренное подразделом (b), (c), (d) или (e), является фелонией класса C, если правонарушение приводит к смерти рабочего на рабочем месте.
(i) Лицо, которое сознательно, преднамеренно или по неосторожности совершает действие, описанное в статье 55(b)(1), 55(b)(2), 55(b)(3), 55(b)(4). ), 55(b)(5) или 55(b)(6) настоящей главы в непосредственной близости от рабочей зоны шоссе, когда присутствуют рабочие, совершает нарушение класса B. Несмотря на IC 34-28-5-5(c), средства, собранные в качестве судебных решений за нарушение в соответствии с этим подразделом, должны быть переведены в Департамент транспорта штата Индиана для оплаты расходов по найму внеслужебных полицейских для выполнения обязанностей, описанных в IC. 8-23-2-15(б).
8-23-2-15(б).
Добавлено P.L.40-2007, SEC.6. Изменено P.L.66-2011, SEC.2.
IC 9-21-8-57
Эксплуатация гольф-кара на шоссе
Сек. 57. Запрещается использовать гольф-кар на шоссе, кроме как в соответствии с постановлением, принятым согласно IC 9-21-1-3(a)(14) и IC 9-21-1-3.3(a), разрешающим эксплуатацию гольф-кар на шоссе.
Добавлено P.L.182-2009(ss), SEC.293.
ИЦ 9-21-8-58
Внутригосударственные носители металлических рулонов; сертификация
Сек.58. (a) Этот раздел применяется только к внутриштатным перевозчикам металлических рулонов.
(b) 49 CFR 393.120 принят в качестве закона штата Индиана.
(c) Автомобильный перевозчик (как определено в IC 8-2.1-17-10) не может инициировать или прекращать коммерческую перевозку в пределах Индианы коммерческим автотранспортным средством одного (1) или нескольких металлических рулонов, которые по отдельности или вместе, весить не менее двух тысяч двухсот
шестидесяти восьми (2 268) килограммов (пять тысяч (5 000) фунтов), как это предусмотрено в 49 CFR 393.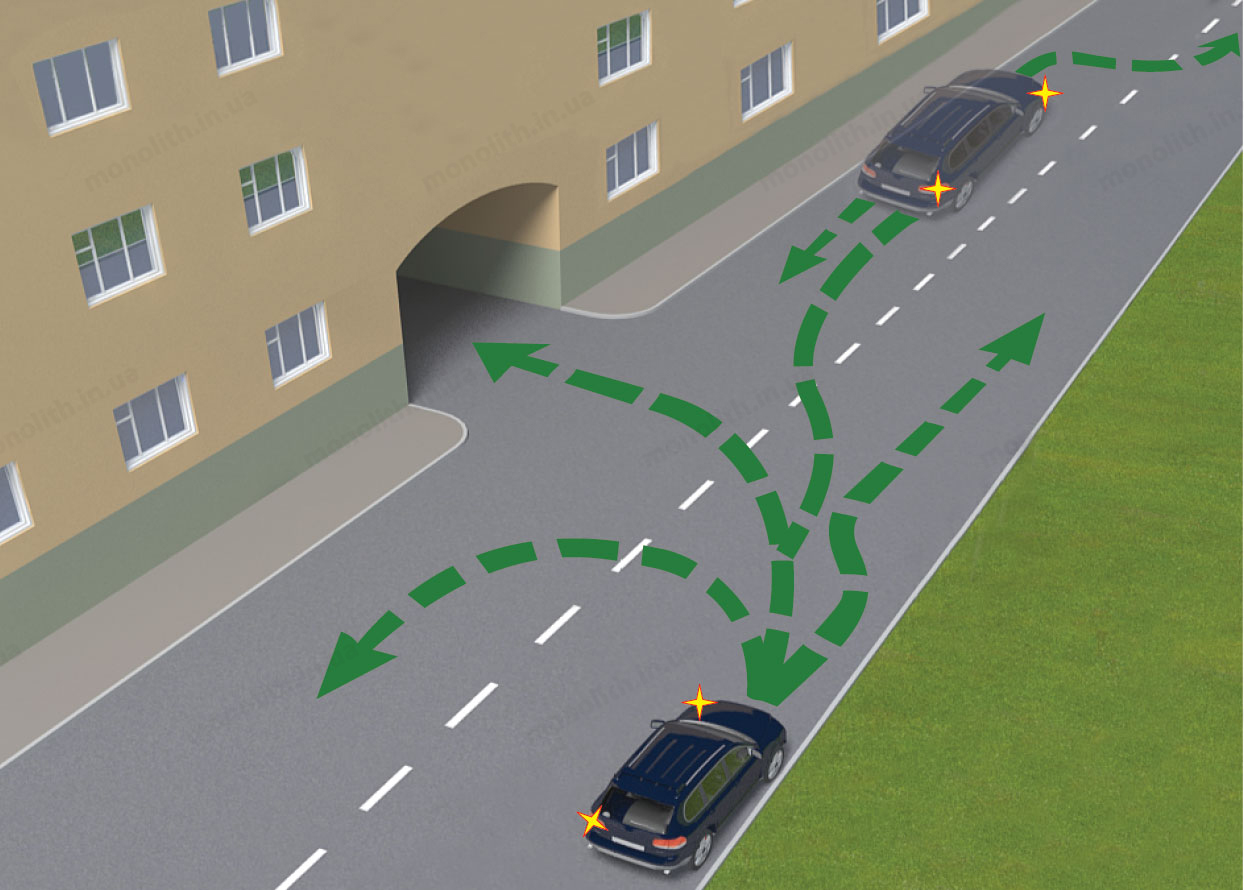 120, если только оператор коммерческого автомобиля, перевозящего металлическую катушку или катушки, не сертифицирован в надлежащем порядке. крепление груза согласно 49 CFR 393.120.
120, если только оператор коммерческого автомобиля, перевозящего металлическую катушку или катушки, не сертифицирован в надлежащем порядке. крепление груза согласно 49 CFR 393.120.
(d) Оператор коммерческого автомобиля не может инициировать или прекращать коммерческую перевозку в пределах Индианы коммерческим автомобилем одного (1) или более металлических рулонов, которые по отдельности или вместе весят не менее двух тысяч двух сто шестьдесят восемь (2 268) кг (пять тысяч (5 000) фунтов), как предусмотрено в 49 CFR 393.120, если только водитель коммерческого автомобиля, перевозящего металлическую катушку или рулоны, не сертифицирован в отношении надлежащего крепления груза, как предусмотрено в 49 CFR 393. .120.
(e) Департамент доходов должен принять и обеспечить соблюдение правил в соответствии с IC 4-22-2, касающихся сертификации в надлежащем креплении груза (как предусмотрено в 49 CFR 393.120) операторов коммерческих автомобилей, занимающихся коммерческими перевозками одного (1) или более металлических рулонов, как указано в 49 CFR 393. 120. Правила, принятые в соответствии с этим подразделом, должны признавать сертификаты на отгрузку металлических рулонов, выданные другими государствами.
(f) Лицо, сознательно или преднамеренно нарушающее подразделы (c) или (d), совершает проступок класса А.
Добавлено P.L.65-2010, SEC.5.
ИЦ 9-21-8-59
Использование средств связи при управлении движущимся автотранспортным средством
Разд. 59. (a) Лицо не может использовать телекоммуникационное устройство для:
(1) ввода текстового сообщения или сообщения электронной почты;
(2) передавать текстовое сообщение или сообщение электронной почты; или
(3) прочитать текстовое сообщение или сообщение электронной почты;
во время управления движущимся транспортным средством, за исключением случаев, когда устройство используется в сочетании с технологией громкой связи или голосовым управлением, или если устройство не используется для вызова службы экстренной помощи, чтобы сообщить о реальной чрезвычайной ситуации.
(b) Сотрудник полиции не может конфисковать телекоммуникационное устройство с целью определения соответствия этому разделу или конфисковать телекоммуникационное устройство и сохранить его в качестве доказательства до суда за нарушение этого раздела.
Добавлено P.L.185-2011, SEC.4.
Управление поворотом транспортного средства на пересечении для сценариев полностью автономного вождения
Резюме
В настоящее время исследования и разработки автономных транспортных средств (ADV) в основном рассматривают ситуацию, при которой автомобили с ручным управлением и ADV движутся одновременно по полосам.Для получения информации о самом транспортном средстве и окружающей среде, необходимой для принятия решений и управления, разрабатываемые в настоящее время ADV, как правило, оснащаются большим количеством датчиков, например, высокоточными системами глобального позиционирования, различными типами радар и системы видеообработки. Очевидно, что современные усовершенствованные системы помощи водителю (ADAS) или ADV все еще имеют некоторые проблемы, связанные с высокой надежностью безопасности движения, а также стоимостью и ценой автомобиля.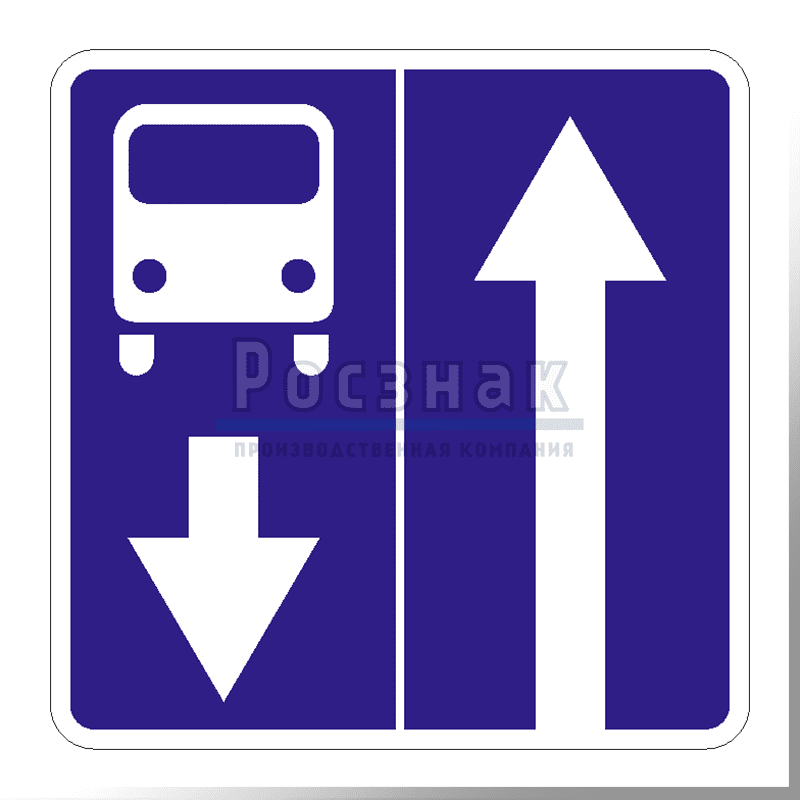 Однако несомненно, что в будущем будут некоторые дороги, районы или города, где все транспортные средства будут ADV, то есть без каких-либо транспортных средств, управляемых людьми. Для таких сценариев методы обнаружения окружающей среды, индикации инструкций по движению и управления транспортным средством должны отличаться от методов, описанных в ситуации, упомянутой выше, если необходимо значительно повысить надежность безопасности вождения и ожидаемую стоимость производства. Предвидя, что более сложная специализированная транспортная сеть (VANET) должна стать важной транспортной инфраструктурой для будущих сценариев ADV, изучается проблема управления поворотом транспортного средства на основе связи транспортного средства со всем (V2X) на перекрестках дорог.Управление поворотом на перекрестках в основном связано с тремя основными проблемами, а именно: выбор целевой полосы движения, планирование и расчет траектории, а также контроль и отслеживание транспортных средств. В этой статье стратегия управления, модель и алгоритмы предлагаются для трех основных задач.
Однако несомненно, что в будущем будут некоторые дороги, районы или города, где все транспортные средства будут ADV, то есть без каких-либо транспортных средств, управляемых людьми. Для таких сценариев методы обнаружения окружающей среды, индикации инструкций по движению и управления транспортным средством должны отличаться от методов, описанных в ситуации, упомянутой выше, если необходимо значительно повысить надежность безопасности вождения и ожидаемую стоимость производства. Предвидя, что более сложная специализированная транспортная сеть (VANET) должна стать важной транспортной инфраструктурой для будущих сценариев ADV, изучается проблема управления поворотом транспортного средства на основе связи транспортного средства со всем (V2X) на перекрестках дорог.Управление поворотом на перекрестках в основном связано с тремя основными проблемами, а именно: выбор целевой полосы движения, планирование и расчет траектории, а также контроль и отслеживание транспортных средств. В этой статье стратегия управления, модель и алгоритмы предлагаются для трех основных задач. Парадигма прогнозирующего управления моделью (MPC) используется в качестве контроллера верхнего уровня транспортного средства. Моделирование проводится на платформе CarSim-Simulink с типовыми сценами пересечения.
Парадигма прогнозирующего управления моделью (MPC) используется в качестве контроллера верхнего уровня транспортного средства. Моделирование проводится на платформе CarSim-Simulink с типовыми сценами пересечения.
Ключевые слова: автономное вождение, управление поворотом транспортного средства, VANET, модельно-предиктивное управление
1.Введение
В настоящее время исследования и разработки передовых систем помощи водителю (ADAS) в основном сосредоточены на растущем рыночном спросе [1]. Его проводят такие компании, как Tesla, Google, Baidu и т. д., и дорожная ситуация, которую они представляют, обычно представляет собой ситуацию, когда люди управляют транспортными средствами, а также с автономными транспортными средствами (ADV) или беспилотными транспортными средствами, которые одновременно встречаются на дорогах. Для получения информации о самом транспортном средстве и окружающей среде, которая необходима для принятия решений и управления, разрабатываемые в настоящее время ADV обычно оснащаются множеством сенсорных систем, например. г., система позиционирования земного шара, лидар, радар миллиметрового диапазона, инфракрасный радар, видеосистема или система технического зрения и так далее. Информация датчика обрабатывается усовершенствованными или интеллектуальными процессорами. Текущие решения ADAS или ADV все еще имеют некоторые проблемы [2]. Во-первых, эти оборудованные сенсорные системы могут не гарантировать абсолютно надежность безопасности вождения из-за ухудшения их характеристик, вызванного плохой погодой, недостатком света, наличием препятствий, слепых зон и т. д. Во-вторых, продвинутым или интеллектуальным алгоритмам может потребоваться слишком много времени, чтобы извлекать необходимую информацию из воспринятых сигналов, таких как видео, из-за вычислительной сложности.Например, если мы хотим, чтобы транспортное средство со скоростью 160 км/ч принимало решения для автономного вождения в интервале времени, которое транспортное средство перемещает каждые 0,5 м, все вычисления должны быть завершены за 22,5 миллисекунды.
г., система позиционирования земного шара, лидар, радар миллиметрового диапазона, инфракрасный радар, видеосистема или система технического зрения и так далее. Информация датчика обрабатывается усовершенствованными или интеллектуальными процессорами. Текущие решения ADAS или ADV все еще имеют некоторые проблемы [2]. Во-первых, эти оборудованные сенсорные системы могут не гарантировать абсолютно надежность безопасности вождения из-за ухудшения их характеристик, вызванного плохой погодой, недостатком света, наличием препятствий, слепых зон и т. д. Во-вторых, продвинутым или интеллектуальным алгоритмам может потребоваться слишком много времени, чтобы извлекать необходимую информацию из воспринятых сигналов, таких как видео, из-за вычислительной сложности.Например, если мы хотим, чтобы транспортное средство со скоростью 160 км/ч принимало решения для автономного вождения в интервале времени, которое транспортное средство перемещает каждые 0,5 м, все вычисления должны быть завершены за 22,5 миллисекунды.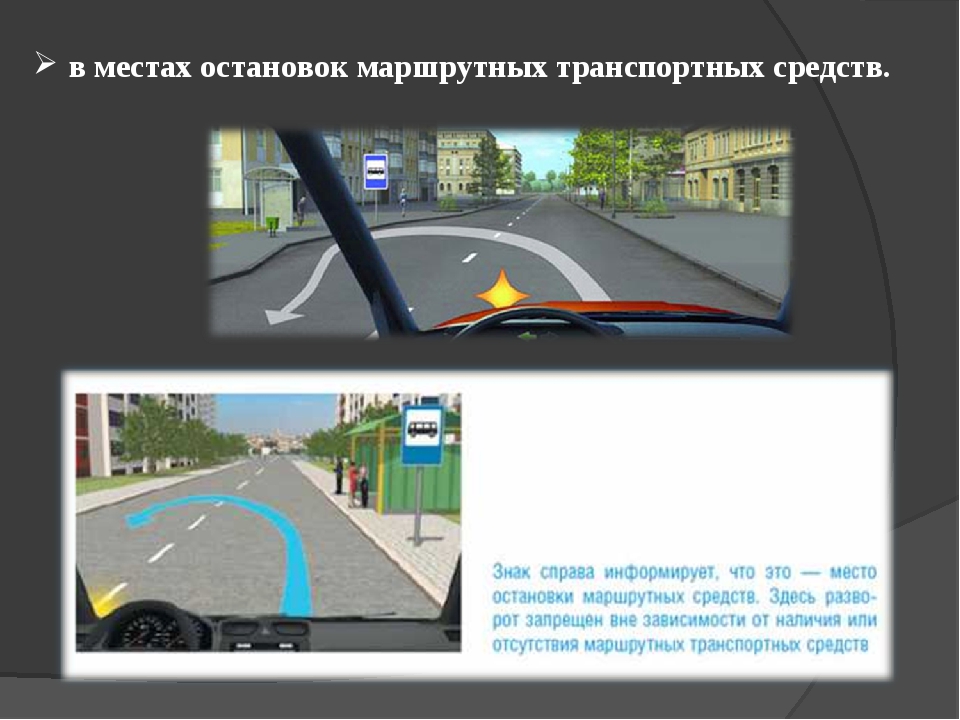 В-третьих, эти сенсорные системы, особенно лидары, значительно увеличивают стоимость производства транспортных средств.
В-третьих, эти сенсорные системы, особенно лидары, значительно увеличивают стоимость производства транспортных средств.
Можно ожидать, что в будущем появятся некоторые дороги, районы или города, где все транспортные средства будут полностью ADV, т. е. без каких-либо транспортных средств с ручным управлением в дорожном движении.Чтобы повысить безопасность вождения и снизить производственные затраты, в таких сценариях способ обнаружения окружающей среды, индикации инструкций по движению и управления транспортным средством может отличаться от того, что используется в текущих ADAS или ADV. Мы предполагаем, что более сложная VANET (автомобильная специализированная сеть) должна стать важной инфраструктурой для будущих перевозок ADV, поскольку она может предоставлять гораздо больше информации с гораздо большей эффективностью посредством связи V2X (т. е. транспортное средство-транспортное средство, транспортное средство-инфраструктура). , транспортное средство-пешеход и т. д.). Это предвкушение мотивирует работу над статьей.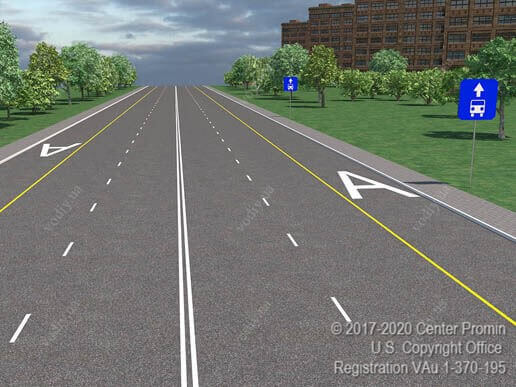
Статистические данные дорожно-транспортных происшествий показывают, что многие аварии происходят из-за поворота транспортного средства на перекрестках [3]. Поэтому важным вопросом является правильное управление поведением транспортного средства в таких ситуациях, более того, управление поворотом транспортного средства на перекрестке является одной из самых сложных задач, решаемых в сценарии ADV. Проблема в основном состоит из трех основных вопросов, а именно выбора целевой полосы движения, планирования и расчета траектории, а также управления и отслеживания транспортных средств.В этой статье стратегия, модель и алгоритмы, касающиеся управления поворотом транспортных средств на перекрестке, предлагаются для трех вышеупомянутых фундаментальных проблем. Парадигма MPC (управление с прогнозированием моделей) [4] используется в качестве контроллера верхнего уровня транспортного средства. Моделирование проводится на платформе CarSim-Simulink с типовыми сценами пересечения [5]. Основной вклад этой статьи состоит в том, чтобы:
Предложить подход к проблеме управления поворотным маневром на перекрестках для сценариев ADV, который основан на связи V2X вместо различных систем датчиков, таких как лидар, миллиметровый радар и видеосистема.
Можно было ожидать, что стоимость автомобилей может быть значительно снижена при таком решении.Предложите простую и осуществимую стратегию выбора целевой полосы с учетом характеристик сценариев полной ADV. Выбор целевой полосы является относительно сложной проблемой в сценарии без полного ADV.
Разработайте и внедрите контроллер верхнего уровня на основе MPC для автономного вождения автомобиля и проведите масштабное моделирование с помощью кросс-платформы CarSim-Simulink.
 Можно было ожидать, что стоимость автомобилей может быть значительно снижена при таком решении.
Можно было ожидать, что стоимость автомобилей может быть значительно снижена при таком решении.Остальная часть этой статьи организована следующим образом: Исследовательские работы, относящиеся к нашей, рассматриваются в Разделе 2. В Разделе 3 обсуждаются сценарии ADV и управление поворотом. В разделе 4 проводится проверка моделирования и анализ данных предлагаемого метода. В заключении дается заключение и направление дальнейших исследований.
2. Сопутствующая работа
Пионерское производство ADV в настоящее время разрабатывает автомобили, которые будут двигаться по дорогам вместе с транспортными средствами, управляемыми людьми. Они не раскрывают деталей своих решений, таких как расчет траектории и управление транспортным средством. Однако можно предположить, что они предпочитают общее решение, подходящее для всех дорожных сценариев, а не рассмотрение конкретных форм дорог, таких как перекресток или перекресток [6]. Это связано с двумя факторами. Во-первых, в настоящее время нет простого способа получить достаточно информации о правилах дорожного движения и надежно определить форму дороги до того, как будут развернуты сети VANET или станут доступны высокодетальные электронные карты.Во-вторых, случайные события или поведение человека за рулем затрудняют принятие управляющих решений, которые были бы эффективными во всей процедуре, например, при выборе целевой полосы движения при повороте ADV.
Они не раскрывают деталей своих решений, таких как расчет траектории и управление транспортным средством. Однако можно предположить, что они предпочитают общее решение, подходящее для всех дорожных сценариев, а не рассмотрение конкретных форм дорог, таких как перекресток или перекресток [6]. Это связано с двумя факторами. Во-первых, в настоящее время нет простого способа получить достаточно информации о правилах дорожного движения и надежно определить форму дороги до того, как будут развернуты сети VANET или станут доступны высокодетальные электронные карты.Во-вторых, случайные события или поведение человека за рулем затрудняют принятие управляющих решений, которые были бы эффективными во всей процедуре, например, при выборе целевой полосы движения при повороте ADV.
Для создания правильного поворота транспортного средства, который может предотвратить риск столкновения, наиболее важным вопросом является планирование и расчет географической траектории для транспортных средств. Есть много литературы, в которой сообщается о работах, связанных с траекторией поворота, но они в основном относятся к транспорту или проектированию дорог [7,8,9,10]. Например, [7,8] используют анализ диаграммы, чтобы показать, что траектории могут сильно различаться для разных водителей в соответствии с фактическими данными о дорожном движении. Путем анализа и кластеризации очень разнообразных реальных путей поворота человека за рулем [9] моделируется путь поворота с помощью кривой Эйлера, соединенной прямой линией на каждом конце, для получения непрерывно меняющейся кривизны. Позже предлагается пятисегментная поворотная траектория путем вставки дуги окружности между двумя кривыми Эйлера [10]. Чтобы сформировать траекторию движения по географическому маршруту, необходимо установить зависимость скорости или ускорения от времени.В исследовании [10] представлены профили средней скорости для различных типов транспортных средств и геометрии дорог методом кластеризации. Кубическая функция изменения скорости на поворотном перекрестке предложена в [11], каждый параметр в этой кубической функции определяется множеством условий ограничений, например, коэффициент невязки, скорость и ускорение автомобиля, неизвестные величины.
Например, [7,8] используют анализ диаграммы, чтобы показать, что траектории могут сильно различаться для разных водителей в соответствии с фактическими данными о дорожном движении. Путем анализа и кластеризации очень разнообразных реальных путей поворота человека за рулем [9] моделируется путь поворота с помощью кривой Эйлера, соединенной прямой линией на каждом конце, для получения непрерывно меняющейся кривизны. Позже предлагается пятисегментная поворотная траектория путем вставки дуги окружности между двумя кривыми Эйлера [10]. Чтобы сформировать траекторию движения по географическому маршруту, необходимо установить зависимость скорости или ускорения от времени.В исследовании [10] представлены профили средней скорости для различных типов транспортных средств и геометрии дорог методом кластеризации. Кубическая функция изменения скорости на поворотном перекрестке предложена в [11], каждый параметр в этой кубической функции определяется множеством условий ограничений, например, коэффициент невязки, скорость и ускорение автомобиля, неизвестные величины. Эти неизвестные величины отражают поведенческие различия, вызванные индивидуальными характеристиками и межатрибутами водителей. Эти различия моделируются как случайные величины, и, наконец, параметры определяются статистическим методом.
Эти неизвестные величины отражают поведенческие различия, вызванные индивидуальными характеристиками и межатрибутами водителей. Эти различия моделируются как случайные величины, и, наконец, параметры определяются статистическим методом.
Чтобы решить проблему конфликта маршрутов многополосных транспортных средств, [12] заставляет каждое поворачивающее транспортное средство выбирать фиксированную полосу, устанавливая направляющие линии левого поворота. В [13] измерено поведение транспортного потока при выборе полосы движения от ответвления к магистральной дороге на четырех непрерывных перекрестках городской магистральной дороги. Поведение при выборе полосы разделено на две части: поведение при выборе временной полосы и поведение при выборе целевой полосы. Принимая во внимание различные факторы, влияющие на две вышеперечисленные части, такие как характеристики водителей, атрибуты полосы движения, ожидаемая максимальная полезность прямой полосы движения и т. д.строится совместная вероятностная модель для выбора полосы с наибольшей вероятностью для каждого транспортного средства.
Третий вопрос — управление транспортным средством. Популярная структура контролирующей единицы иерархическая [14,15,16,17,18,19,20,21]. То есть верхний уровень управления в основном предназначен для создания соответствующих управляющих переменных, обычно включая ускорение и угол переднего колеса. Нижний уровень управления представляет собой контроллер динамики транспортного средства, который преобразует выходные данные верхнего уровня во входные переменные привода, такие как открытие дроссельной заслонки, угол поворота рулевого колеса и т. д.Работа в этой статье в основном сосредоточена на разработке верхнего контроллера, что позволяет реализовать нижний уровень управления на зрелой платформе динамического моделирования транспортных средств, такой как CarSim.
Основной целью контроллера верхнего уровня является отслеживание его эталонного ввода. В настоящее время широко используемые методы включают классическое пропорционально-интегрально-дифференциальное (ПИД) управление [14,15], управление в скользящем режиме [16,17] и управление с прогнозированием моделей (MPC) [4,18,19,20,21]. В работе [14] ПИД-регулятор используется для реализации продольного верхнего управления транспортным средством на автоматической магистрали.В исследовании [15] разрабатывается стратегия прямого управления и завершается адаптивная система крейсерского полета с координацией формации путем улучшения коэффициента пропорциональности PID. Тем не менее, ПИД-регулятор верхнего уровня обычно учитывает только обратную связь по ошибке и имеет относительно фиксированную структуру. Следовательно, эффект управления производительностью не является удовлетворительным при изменении внешних условий. Следовательно, была предложена схема, называемая скользящим режимом управления, которая не требует фиксированной структуры системы и имеет преимущества быстрой реакции и нечувствительности к помехам.В работе [16] используется каскадная система управления, в которой внутренний контур использует скользящий режим управления для обеспечения траекторного отслеживания пласта. В [17] предложен метод спаренного скользящего режима управления для улучшения характеристик управления и устойчивости двустороннего взвода.
В работе [14] ПИД-регулятор используется для реализации продольного верхнего управления транспортным средством на автоматической магистрали.В исследовании [15] разрабатывается стратегия прямого управления и завершается адаптивная система крейсерского полета с координацией формации путем улучшения коэффициента пропорциональности PID. Тем не менее, ПИД-регулятор верхнего уровня обычно учитывает только обратную связь по ошибке и имеет относительно фиксированную структуру. Следовательно, эффект управления производительностью не является удовлетворительным при изменении внешних условий. Следовательно, была предложена схема, называемая скользящим режимом управления, которая не требует фиксированной структуры системы и имеет преимущества быстрой реакции и нечувствительности к помехам.В работе [16] используется каскадная система управления, в которой внутренний контур использует скользящий режим управления для обеспечения траекторного отслеживания пласта. В [17] предложен метод спаренного скользящего режима управления для улучшения характеристик управления и устойчивости двустороннего взвода. Однако этот метод должен преодолевать дребезжание при приближении к точке равновесия. Самые последние работы [4,18,19,20,21] основаны на MPC, который представляет собой класс парадигм управления на основе оптимизации с гибкой структурой и целевой функцией.Исследование в [4] строит квадратичную целевую функцию для минимизации ошибки траектории, а целевые функции в [18] и [19] основаны на эффективности использования топлива, а [20,21] предлагает прогнозирующий контроллер, полученный из бесконечной нормы с целью обеспечения того, чтобы расстояние между передним и задним транспортными средствами всегда превышало минимальное безопасное расстояние [20].
Однако этот метод должен преодолевать дребезжание при приближении к точке равновесия. Самые последние работы [4,18,19,20,21] основаны на MPC, который представляет собой класс парадигм управления на основе оптимизации с гибкой структурой и целевой функцией.Исследование в [4] строит квадратичную целевую функцию для минимизации ошибки траектории, а целевые функции в [18] и [19] основаны на эффективности использования топлива, а [20,21] предлагает прогнозирующий контроллер, полученный из бесконечной нормы с целью обеспечения того, чтобы расстояние между передним и задним транспортными средствами всегда превышало минимальное безопасное расстояние [20].
Несколько других работ представили методы, основанные на данных, для прогнозирования траекторий поворота транспортных средств и управления транспортными средствами.Ведущее транспортное средство определяет траекторию поворота путем обучения траектории переднего транспортного средства в наборе данных [22,23] и полагается на камеры, радар, GPS и другие датчики для завершения управления транспортным средством [24]. Вообще говоря, этот вид управления поворотом транспортного средства, основанный на большом количестве датчиков, имеет высокую сложность, точность воспринимаемой периферийной информации не может быть гарантирована, а стоимость также значительно выше, чем на основе связи V2X [25].
Вообще говоря, этот вид управления поворотом транспортного средства, основанный на большом количестве датчиков, имеет высокую сложность, точность воспринимаемой периферийной информации не может быть гарантирована, а стоимость также значительно выше, чем на основе связи V2X [25].
Однако, насколько нам известно, нет литературы, посвященной полностью ADV-сценариям, в которых можно было бы ожидать, что VANET станет важной инфраструктурой будущей транспортной системы.Такое ожидание побуждает нас решать проблему с разными направлениями мысли и разными решениями.
3. Управление поворотом для сценариев ADV
Как уже упоминалось, управление поворотом на перекрестке в основном решает три основные проблемы, т. е. выбор целевой полосы движения, планирование и расчет траектории, а также управление и отслеживание транспортных средств, которые рассматриваются в этом разделе. . Прежде всего следует уточнить, что дизайн или подход, предложенный в этой статье, основан на следующих соображениях или предположениях:
Вычислительная нагрузка алгоритмов настолько мала, насколько это возможно, чтобы они могли работать на недорогих встроенных системах, сохраняя при этом возможность обработки в реальном времени.
Используя специальную систему позиционирования вместо GPS или упомянутых датчиков, будущая VANET могла бы предоставлять информацию о местоположении всех транспортных средств с точностью до десятков сантиметров (на самом деле такое устройство позиционирования находится в стадии разработки [26,27 ]).
Информации, передаваемой или предоставляемой VANET, должно быть как можно меньше, так как пропускная способность беспроводного канала будет узким местом приложения ADV в случаях большого трафика.

3.1. Описание сценария и формулировка проблемы
Как показано на , мы рассматриваем регулируемый перекресток с несколькими поворотными полосами и несколькими целевыми полосами. Придорожные устройства (RSU) распределены по обеим сторонам дороги, и все транспортные средства на дороге представляют собой ADV, оснащенные бортовыми устройствами (OBU). Задержку связи и потерю содержимого передачи можно не учитывать в сцене поворота. Для этих условий в этой статье разработана система управления поворотом, которая может выполнять следующие три функции.
Типичный сценарий многополосного перекрестка.
(1)
В соответствии с требованиями вождения, транспортные средства, въезжающие на перекресток, могут реализовать автоматическое управление поворотом налево, поворотом направо и разворотом.
(2)
Когда поворачивающие транспортные средства освобождаются от нескольких поворотных полос на сигнальном перекрестке, система управления поворотом должна решить проблему конфликта путей между поворачивающими транспортными средствами, чтобы максимально сбалансировать выездной транспортный поток, и учитывать как можно меньше изменений полосы движения после поворота.
(3)
В процессе поворота транспортные средства должны максимально сокращать расстояние до впереди идущего транспорта для повышения эффективности движения перекрестка с условием обеспечения безопасного расстояния до впереди идущего транспорта .
Для более эффективного управления транспортными средствами транспортные средства, приближающиеся к перекресткам, могут получать важные сообщения от RSU. OBU также могут передавать друг другу основные состояния движения и некоторые дополнительные данные о каждом транспортном средстве.
OBU также могут передавать друг другу основные состояния движения и некоторые дополнительные данные о каждом транспортном средстве.
В этом документе RSU требуется только для отправки сообщений на OBU без получения обратно от OBU, что значительно снижает нагрузку на RSU. Формат и содержание сообщений от RSU и OBU показаны на .
Таблица 1
Сообщения, определенные для RSU и OBU.
| RSU Сообщение | OBU Message |
|---|---|
| автомобиль | автомобиль ID |
| Местоположение STOP LINE | Местоположение |
| Направление | Velocity |
| Штат | Статус |
| Оставшееся время | Момент |
В сообщении RSU будет передано количество стартовых полос, целевых полос и координат стоп-линии каждой дороги. Состояние может быть либо да, либо нет, чтобы указать, есть ли доступ в этом направлении. Оставшееся время (RT) — это оставшееся время до изменения состояния. Комбинация направления, состояния и оставшегося времени может указывать на оставшееся время зеленого света в каждом направлении.
Состояние может быть либо да, либо нет, чтобы указать, есть ли доступ в этом направлении. Оставшееся время (RT) — это оставшееся время до изменения состояния. Комбинация направления, состояния и оставшегося времени может указывать на оставшееся время зеленого света в каждом направлении.
В сообщении OBU идентификатор транспортного средства, местоположение и скорость являются основной информацией о транспортных средствах. Статус указывает поведение, которое, как ожидается, будет вести транспортное средство-хозяин, значение которого может быть -1, 0 или 1, представляя замедление до остановки, продолжение движения в текущих состояниях движения или ускорение до желаемой скорости соответственно.Момент сообщает, когда изменить поведение, связанное со статусом. Обозначает замедляющий момент, когда статус равен -1, и ускоряющий момент, когда статуи равны 1.
3.2. Рама управления поворотом транспортного средства
Рама управления поворотом, предложенная в этой статье, показана на .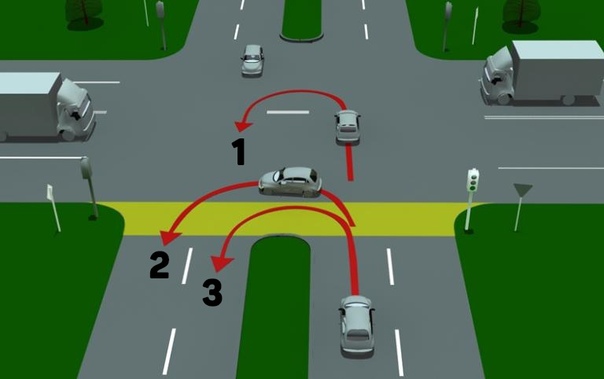 Он в основном состоит из пяти модулей: выбор целевой полосы движения, планирование траектории движения, расчет входных данных контроллера, контроллер MPC и установка. Чтобы решить проблему конфликта траекторий транспортных средств на нескольких поворотных полосах, в этой статье сначала разрабатывается алгоритм выбора целевой полосы, который генерирует координаты точки выезда для каждого транспортного средства.
Он в основном состоит из пяти модулей: выбор целевой полосы движения, планирование траектории движения, расчет входных данных контроллера, контроллер MPC и установка. Чтобы решить проблему конфликта траекторий транспортных средств на нескольких поворотных полосах, в этой статье сначала разрабатывается алгоритм выбора целевой полосы, который генерирует координаты точки выезда для каждого транспортного средства.
Структура системы поворотного автомобиля для АДВ.
Модуль планирования траектории устанавливает географический маршрут движения от начальной точки поворота до конечной точки. Затем модуль расчета эталонного входного контроллера генерирует географическую траекторию движения с отметкой времени для формирования эталонной траектории. В этой статье для отслеживания пути принят иерархический дизайн. Контроллер верхнего уровня использует модуль MPC для генерации управляющих переменных, ускорения и направления переднего колеса.Контроллер нижнего уровня завершает управление динамикой транспортного средства, в основном полагаясь на платформу динамического моделирования CarSim, которая является заводским модулем на блок-схеме. Модуль обнаружения периферийных транспортных средств в нашей системе нуждается только в информации о положении, скорости и значениях курса других транспортных средств, чтобы определить, является ли окружающая среда ненормальной в процессе поворота транспортного средства, которая может быть получена от транспортного средства к транспортному средству (V2V ) связь, но необходимая информация о состоянии транспортного средства с датчиком, такая как поза, может быть предоставлена местным бортовым устройством.Модуль планирования v-state транслирует состояние автомобиля, что в основном относится к тому, когда автомобиль впереди меняет свое состояние. Например, status = 1 и Moment=tAd означают, что впереди идущий автомобиль начинает разгоняться в момент времени tAd, что удобно идущему сзади автомобилю для планирования траектории.
Модуль обнаружения периферийных транспортных средств в нашей системе нуждается только в информации о положении, скорости и значениях курса других транспортных средств, чтобы определить, является ли окружающая среда ненормальной в процессе поворота транспортного средства, которая может быть получена от транспортного средства к транспортному средству (V2V ) связь, но необходимая информация о состоянии транспортного средства с датчиком, такая как поза, может быть предоставлена местным бортовым устройством.Модуль планирования v-state транслирует состояние автомобиля, что в основном относится к тому, когда автомобиль впереди меняет свое состояние. Например, status = 1 и Moment=tAd означают, что впереди идущий автомобиль начинает разгоняться в момент времени tAd, что удобно идущему сзади автомобилю для планирования траектории.
3.3. Выбор целевой полосы
Как упоминалось выше, цель выбора целевой полосы состоит в том, чтобы разрешить конфликт траекторий многополосных транспортных средств с поворотом, обеспечить эффективность движения и заставить транспортные средства как можно реже менять полосу движения после поворота. Поэтому наш алгоритм выбора полосы движения применяется до въезда транспортных средств на перекресток и в основном зависит от направления движения транспортных средств на следующем перекрестке и выбора полосы движения транспортных средств впереди.
Конкретный расчет на примере поворота налево выглядит следующим образом: предположим, что на текущем перекрестке имеется M полос для левого поворота и N целевых полос (эти данные получены посредством трансляции RSU на перекрестке). Основная идея схемы выбора полосы состоит в том, чтобы преобразовать задачу выбора полосы от M до N в задачу выбора полосы от 1 до N′ , и транспортные средства в каждой левой исходной полосе не влияют на каждую полосу. другой, поэтому схема должна получать результаты выбора дороги впереди идущего автомобиля только в текущей полосе левого поворота.Кроме того, немногие транспортные средства поворачивают налево на следующем перекрестке при повороте налево на текущем перекрестке, поэтому выделение целевой полосы должно происходить с уклоном от второй полосы. Конкретные шаги следующие:
Шаг 1: Целевая дорожка делится в среднем на M частей, а среднее количество дорожек, соответствующих каждой исходной дорожке, составляет k = Н/м.
Шаг 2: Так как она разделена неравномерно, оставшееся поле целевой полосы составляет T = N − k * M .
Шаг 3: Каждое транспортное средство создает очередь длиной M в своем бортовом устройстве. Во-первых, начальное значение каждой очереди равно k , то есть [k,k,k⋯k], где количество элементов равно M. Затем из второй дорожки выделяется запас целевой дорожки. Наконец, во всех OBU можно получить следующую очередь, то есть:
[k,k+1,k+1,⋯k+1⏟T,k⋯k⏟M]
(1)
Шаг 4 : Каждый бортовой блок преобразует очередь в целевую полосу, требуемую текущим ведущим транспортным средством.
Шаг 5: Вызовите функцию выбора полосы от 1 до N′ и каждый раз выбирайте пустую полосу рядом с целевой полосой.
Что касается функции выбора полосы движения от 1 до N’ , то она относительно проста, поскольку не связана с проблемой конфликта путей. Транспортные средства сначала группируются в соответствии с N’ , и заднее транспортное средство выбирает полосу движения, которую не выбирает переднее транспортное средство, но которая находится ближе всего к желаемой полосе. Например, если транспортное средство повернет направо на следующем перекрестке, оно, естественно, ожидает ближайшую к правой полосе.Если движущиеся впереди транспортные средства в той же группе не выбрали крайнюю правую полосу, то движущееся в данный момент поворачивающее транспортное средство выберет эту полосу.
3.4. Планирование и расчет траектории
При планировании маршрута движения учитывается только географический маршрут, по которому должно следовать транспортное средство. На этом треке, когда и где транспортное средство стартует и останавливается, скорость транспортного средства для каждой позиции анализируется и контролируется как отдельные задачи. Здесь можно предположить, что идеальный путь поворачивающего транспортного средства представляет собой дугу, совмещенную с прямой линией.Его рациональность в основном заключается в двух моментах: (1) траектория поворота водителя близка к дуге в большинстве сцен поворота; и (II) угол поворота рулевого колеса в основном фиксирован при фактическом повороте (то есть угол наклона переднего колеса в основном одинаков). В соответствии с идеей геометрии рулевого управления Аккермана [28] имеем R=L/δ, где L обозначает продольное расстояние в метрах между центрами переднего и заднего колес, δ обозначает прогиб переднего колеса в радианах, а R обозначает радиус поворота в метрах.Если скорость в основном фиксирована, соответствующая ей дорожка представляет собой определенную дугу. Однако, если местность слишком ограничена, чтобы следовать по дуге, или если транспортное средство обнаруживает опасность для окружающих транспортных средств во время поворота, нам необходимо перепланировать траекторию (см. ). Здесь в этой статье основное внимание уделяется раскрытию сценария, в котором поворот может быть завершен по дуге в сочетании с прямой линией.
В соответствии с нашим алгоритмом, OBU получает координаты четырех ключевых точек, переданные RSU, включая координаты местоположения начальной точки остановки дороги X s ( x 0 , y 0 99013 Начальная линия дороги удлинитель одна точка x S1 ( x 1 , y 1 ), окончание дороги остановки x F ( x N 0 , y n n 0 ), а одна точка окончания дороги удлинитель x F1 ( x n 1 , y n 1 ).Здесь точка расширенной линии не выбирается произвольно, а предварительно выбирается RSU. Он может представлять собой угол поворота дороги в сочетании с точкой стоп-линии. Координаты здесь — это позиции GPS. Взяв X s в качестве примера, x 0 — это долгота положения, а y 0 — это широта, а другие аналогичны. Выходными данными являются положение начальной остановки X s , конечной остановки X f , начала дуги A конца дуги B центра окружности T и радиуса угла . начальный угол рыскания дороги φs, конечный угол рыскания дороги φf.Угол рыскания здесь относится к углу между направлением основного корпуса транспортного средства и направлением на северный полюс. При этом следует отметить, что точка А и точка X s , точка B и точка X f могут совпадать. Конкретная реализация алгоритма показана следующим образом.
Шаг 1: Прямая определяется по двум точкам. Таким образом, угол рыскания стартовой дороги определяется от конечной точки стартовой дороги и продолжения дороги.Угол рыскания конечной дороги определяется от конечной точки конечной дороги и продолжения дороги.
Шаг 2: Рассчитайте линейное уравнение начальной и конечной дорог. Это L1, L2.
Шаг 3: Рассчитайте линейное уравнение стоп-линии начальной и конечной дороги.
Шаг 4: Рассчитайте координату пересечения M(xM,yM) двух дорог. Сохраните точку пересечения, если пересечение есть. В противном случае две дороги параллельны.
Шаг 5: Расстояние между центром круга и двумя дорогами одинаково, и определенный круг должен быть вписан в линию полосы движения, чтобы определить уникальный круг. Таким образом можно получить центр окружности и радиус дуги.
Шаг 6: Поскольку траектория дуги определена, получаются начальная и конечная точки дуги во всем процессе токарной обработки.
Приведенный выше алгоритм применим к повороту налево, повороту направо и развороту. Когда разница между φs и φf равна π или −π, это означает разворот.Точно так же, если разница между 0 и π или между −2π и −π, это означает поворот налево; в противном случае это означает поворот направо.
Вышеупомянутое планирование пути движения запланировало географический путь движения, ограничение скорости поворота и ускорение поворачивающего транспортного средства на текущем перекрестке, которые следует учитывать, чтобы сделать географическую отметку времени пути. Таким образом, в этой статье будет представлен алгоритм расчета эталонного входного сигнала контроллера из двух вышеупомянутых аспектов соответственно следующим образом.
3.4.1. Максимальная скорость поворачивающего транспортного средства
Максимальное ограничение скорости поворачивающего транспортного средства в основном зависит от рельефа местности и характеристик транспортных средств. Здесь будет принято ограничение скорости, которое может достичь большинство транспортных средств. При такой скорости не будет бокового скольжения в процессе поворота транспортных средств. В соответствии с нашим алгоритмом это минимальное из следующих двух значений: (I) ограничение скорости для поворота транспортных средств на текущем перекрестке и (II) литература [28,29] дает ограничение скорости при установившихся характеристиках рулевого управления как с использованием модели транспортного средства с двумя степенями свободы [28,29].Связь между скоростью и радиусом поворота формулируется следующим образом.
Преобразовав формулу (3), можно получить соотношение между скоростью и радиусом поворота:
где K называется коэффициентом устойчивости транспортного средства и определяется следующим образом.
где k 1 , k 2 обозначают угловую жесткость передних и задних колес; lf и lr — расстояние от центра масс до центра переднего и заднего колес, L — длина колесной базы автомобиля, м — его масса.Предположим, что все параметры транспортного средства могут быть получены из его электронных блоков, а радиус поворота может быть получен из RSU, уравнение (4) будет определять одно ограничение скорости v ч для поворачивающего транспортного средства. С другой стороны, может существовать ограничение скорости поворота v l , заданное также пересечением RSU, поэтому фактическое максимальное значение может быть получено путем выбора минимального, то есть:
Расчетный результат в основном соответствует с фактической скоростью поворота вождения.
3.4.2. Модель ускорения поворачивающего автомобиля
Вообще говоря, при въезде на перекресток начальная скорость v 0 не превышает максимальную скорость поворота v cmax . Таким образом, наша задача трансформируется в изменение скорости от v 0 до v cmax . В этой статье используется идея кластеризации, рассмотренная в [9], которая группирует среднее ускорение транспортных средств на нескольких транспортных перекрестках, а затем согласовывает соотношение между средним значением ускорения a и радиусом поворота дороги R для построения функция.
В настоящее время использование расчетного среднего ускорения для замены изменения ускорения всего перекрестка может не только упростить процесс управления транспортным средством, но и стать более простым в достижении в эпоху электромобилей.
Таким образом, мы можем получить процесс изменения скорости всего перекрестка.
Когда скорость автомобиля достигает v cmax , автомобиль проезжает перекресток с постоянной скоростью v cmax .
3.5. Управление транспортным средством и отслеживание
Поскольку в то время транспортное средство не следует нашей эталонной траектории без ошибок, применение MPC в этой статье в основном предназначено для помощи в управлении верхней динамической регулировкой транспортного средства.
Принцип управления MPC показан на рис. Во-первых, значение состояния в реальном времени и ожидаемое значение состояния управляемого объекта (обратите внимание, что ожидаемая траектория дискретизируется, чтобы стать известной) принимаются в качестве входных данных контроллера MPC.Затем модуль прогнозирования в контроллере MPC вычисляет значения состояния будущих N p моментов времени в соответствии с уравнением обновления состояния в виде формулы (9). Наконец, модуль оптимизации контроллера MPC устанавливает функцию потерь в соответствии с минимальным значением ошибки между прогнозируемым значением состояния и значением ожидаемого состояния и решает управляющее входное значение, применяемое к контролируемому объекту.
Здесь значения состояния, выбранные в этой статье, включают поперечную ошибку положения, продольную ошибку положения и ошибку угла рыскания и их производную, которая выражается как ξ¯=(y¯˙,x¯˙,ψ¯,ψ¯˙,Y ¯,X¯)T, выходные управляющие переменные представляют собой текущий угол переднего колеса и ускорение, выраженные как u(δ,a).Ссылаясь на уравнение динамики транспортного средства [30,31,32], получаем следующее уравнение переноса состояний:
A=[1T000001-T*(2*Cf+2*Cr)m*vxT*(2*Cf+2*Cr)m-T*(2*Cf*lf-2*Cr*lr)m*vx00001T000 −T*(2*Cf*lf−2*Cr*lr)Iz*vx−T*(2*Cf*lf−2*Cr*lr)Iz1−T*(2*Cf*lf2+2*Cr* lr2)Iz*vx0000001T000001]D=[0−vx*T−T*(2*Cf*lf−2*Cr*l)m*vx0−T*(2*Cf*lf−2*Cr*lr)Iz *vx0T]; B=[002*Cf*Tm0002*T*Cf*lfIz0000-T].
(9b)
Функция стоимости построена по принципу минимума ошибки.
минΔu(k) J(k)=∑i=1Np‖ξ¯(k+i|k)‖Q2+∑i=1Nc‖Δu(k+i|t)‖R2+ρε2 с.т. umin(k+j) (10) где j = 0,1,2,… Nc −1 и i | k обозначает i -й шаг прогнозирования на временном шаге k. N p представляет длину прогнозируемого горизонта. N c представляет длину контрольного горизонта. Параметры Q, R и ρ ∊ [0, 1] выбраны для того, чтобы иметь хороший компромисс между опорной траекторией, отслеживанием политики разрыва и возбуждением исполнительных механизмов.Параметр ε является фактором релаксации, который делает оптимизационную функцию разрешимой. После решения уравнения (10) в каждом цикле управления получается ряд приращений управляющего воздействия во временной области управления: Nc−1*]T (11) Первый элемент в последовательности управления воздействует на систему как приращение фактического управляющего входа, то есть: После входа в следующий цикл управления он повторяет описанный выше процесс, чтобы реализовать управление отслеживанием траектории транспортного средства. В этом разделе мы проведем несколько экспериментов по моделированию для проверки нашего алгоритма, а также контроллера MPC на CarSim-Simulink. Качество связи считается идеальным, моделируются дорожные ситуации для проверки алгоритма выбора полосы движения и управления поворотом транспортного средства с правилами правостороннего движения, такими как Китай, США и т. д. Как показано на рисунке , в одном направлении движутся семь транспортных средств с трех разных полос.Ширина каждой полосы установлена равной 3,5 м, и должны быть выбраны три левые полосы и пять целевых полос. Возьмем в качестве примера первый автомобиль на первой полосе. Координата по оси Y транспортного средства, движущегося по левой стороне полосы движения, устанавливается равной 0, координата по оси X также устанавливается равной 0. Дополнительные основные параметры транспортного средства и начальные условия показаны в и соответственно. Параметры производительности автомобиля, выбранного в CARSIM, показаны в, где L , L F , L R , K 1 и K 2 аналогичны значение в формуле (5), а Iz обозначает момент инерции относительно оси Z. Начальная сцена многополосной симуляции. Начальные позиции транспортных средств в многополосном моделировании. 4. Simulink и экспериментальные результаты
4.1. Моделирование выбора целевой полосы
Таблица 2
автомобиль № 1 2 3 4 5 6 7 x (M) 0 -10 -8 −18 0 −10 −20 Y(m) 0 0 5 −3,5 −7 −7 −7 Табл.
| Масса автомобиля | Размер кузова | л | лф | л | к1 | к2 | IZ |
|---|---|---|---|---|---|---|---|
| 1723 кг | 5 м | 2,6 млн | 1.232 м | 1.468 M | 66 900 N / RAD | 42 700 N / RAD | 4175 кг · м² |
Симуляция результаты показаны в .Все автомобили в крайнем левом ряду выбирают целевую полосу 1, красный автомобиль C3 и фиолетовый автомобиль C4 во второй полосе левого поворота выбирают целевую полосу 2 и 3 соответственно, зеленый автомобиль C5 в третьей полосе левого поворота выбирает целевую полосу 5, желтый автомобиль C6 и синее транспортное средство C7 в третьей полосе левого поворота выбирает целевую полосу 4. Согласно предыдущей стратегии выбора целевой полосы схема выбора от 3 до 5 полос должна соответствовать следующему: первая полоса левого поворота соответствует только целевой полосе 1, вторая полоса для левого поворота соответствует целевым полосам 2 и 3, а третья полоса для левого поворота соответствует целевым полосам 4 и 5.Результаты точно соответствуют ожидаемому поведению транспортных средств.
Координаты всех семи транспортных средств.
4.2. Моделирование маневра поворота
В соответствии с результатами выбора целевой полосы, описанными выше, задача выбора полосы M — N может быть преобразована в задачу выбора полосы 1- N′ , и транспортные средства в разных полосы не влияют друг на друга, поэтому в этом документе дополнительно проверяется управление поворотом двух транспортных средств на одной полосе.Скорость переднего автомобиля составляет v 1 , целевая полоса — roadSelect1 , скорость заднего автомобиля — v 2 , целевая полоса — roadSelect2 . Обратите внимание, что roadSelect1 может совпадать с roadSelect2 или отличаться от него. Показатели производительности, выбранные для сравнения конфигураций управления, — это ошибка отслеживания эталонной траектории и безопасное расстояние.
Конфигурации управления, проанализированные в сравнениях, представляют собой три сценария поворота.Рассматриваются следующие сценарии поворота.
1. L–TC: сценарий управления левым поворотом. Поведение как передних, так и задних транспортных средств должно поворачивать налево, а заднему транспортному средству необходимо принять стратегическое решение о том, может ли оно проехать перекресток в текущий момент и контролировать безопасную дистанцию. Если он может проехать текущий перекресток, и его скорость меньше максимальной скорости сценария левого поворота, он разгоняется до максимальной скорости поворота с фиксированным ускорением, а затем едет с постоянной скоростью.Принимая во внимание контроль зоны ожидания, включенный здесь в сценарий управления левым поворотом, в этой статье он отличается флаговым битом оценки стратегии, то есть flagLeftTurn (следует отметить, что по умолчанию для левого поворота используется красный сигнал светофора). . Если flagLeftTurn = 1, то это означает, что транспортные средства могут повернуть налево через текущий перекресток, а если flagLeftTurn = 2, то это означает, что транспортное средство останавливается в зоне ожидания, иначе, это означает, что оно не может проехать.
2. R-TC: сценарий управления правым поворотом.Поведение как передних, так и задних автомобилей поворачивает направо. Здесь нам нужно рассмотреть, есть ли сценарий управления красным светом, и в этой статье для различения используется флаговый бит flagRightTurn. Как правило, зоны ожидания для правого поворота нет, поэтому бит флага flagRightTurn = 1 указывает, что транспортное средство может повернуть направо через текущий перекресток. Наоборот, это означает, что оно не может пройти.
3. U-TC: сценарий управления разворотом. Это похоже на сценарий правого поворота.С учетом того, есть ли контроль на красный свет, flagUTurn = 1 указывает, что транспортное средство может развернуться и проехать текущий перекресток, иначе оно не может проехать.
Кроме того, для более точного отражения производительности алгоритма, разработанного в этой статье, нам также необходимо рассмотреть производительность алгоритма управления в различных дорожных сценариях, таких как различные скорости переднего и заднего транспортных средств, различные расстояния между двумя транспортными средствами. когда передние и задние транспортные средства только въезжают на перекресток, и разные радиусы поворота дороги.Здесь в этой статье рассматриваются несколько типичных сценариев пересечения дорог города Хэфэй в качестве виртуальных экспериментальных дорог. По полевым измерениям радиус поворота на пересечении улиц Данся и Байняо составляет 11 м, на пересечении улиц Цзиньчжай-Саут-Роуд и Цзыюнь-роуд — 25 м, а на пересечении проспекта Фаньхуа и южной дороги Цзиньчжай — 35 м. . Выбор расстояния и скорости переднего и заднего транспортных средств показан ниже. Кроме того, стоит отметить, что заднее транспортное средство здесь является ведущим транспортным средством.
Таблица 4
Скорость переднего и основного транспортного средства и расстояние между ведущим и передним транспортным средством.
| впре | вего | д1 | д2 | вл | Р | Направление | |
|---|---|---|---|---|---|---|---|
| 0 км / ч | 0 мм / ч | 0 м | 17 м | 40 км / ч | 35 м | левый | |
| 40 км / ч | 40 км / ч | 80 м | 15 м | 40 км / ч | 25 м | 5 м | право |
| 0 км / ч | 0 км / ч | 0 м | 1.5 м | 30 км/ч | 6 м | Разворот |
4.2.1. Проверка эффективности
Проверка эффективности предлагаемой модели в основном проводится с помощью CarSim17, широко используемой платформы для моделирования движения транспортных средств. В этой статье для совместного моделирования используются CarSim17 и Simulink, а для обработки данных моделирования используются XY_Graph, Scope, MatlabFunction. Конкретные результаты показаны в и . Здесь в этой статье выбраны положение, скорость автомобиля позади и расстояние от переднего автомобиля под гусеницей в качестве мер наблюдения для проверки эффективности алгоритма.
Результат теста поворота налево: ( a ) изображение задней дорожки; ( b ) скорость автомобиля спереди и сзади.
Результат проверки правого поворота: ( a ) изображение задней дорожки; ( b ) скорость автомобиля спереди и сзади.
Результат теста на разворот: ( a ) изображение задней колеи; ( b ) скорость автомобиля спереди и сзади.
Передний автомобиль стартует со стоп-линии, расстояние между задним и передним автомобилями 17 м, скорость заднего автомобиля 20 км/ч.Однако в , начальная скорость переднего и заднего транспортных средств составляет 40 км/ч, расстояние между ними составляет 15 м, расстояние между передним транспортным средством и стоп-линией составляет 80 м. Тем не менее, передний автомобиль стартует со стоп-линии точно справа, а задний автомобиль также стоит на расстоянии 1,5 м от переднего автомобиля в .
показывает, что поведение автомобиля позади заключается в том, чтобы поддерживать постоянную скорость в течение определенного периода времени, затем замедляться до состояния, когда расстояние до впереди идущего автомобиля равно фиксированному безопасному расстоянию, а скорость такая же. как у автомобиля впереди, затем поддерживать постоянную скорость в течение т ч секунд при текущей скорости, а затем разогнаться до максимальной скорости.Согласно формулам (4) и (7), при радиусе поворота 6 м ускорение 0,5 м / с 2 , а максимальная скорость поворота 10,0 км/ч. При радиусе поворота 25 м ускорение 1 м / с 2 и максимальная скорость поворота 28,0 км/ч, а при радиусе 35 м ускорение 1,25 м / s 2 и максимальная скорость поворота 36,2 км/ч. В поведении, изображенном на , он сначала поддерживает текущую скорость в течение 8 с, затем равномерно замедляется в течение 1 с.3 с, ускорение которого равно −1 м / с 2 , что означает, что он замедляется до тех пор, пока стоп-линия не станет равной v cmax , а затем проходит перекресток с постоянной скоростью. Поскольку начальное расстояние между транспортными средствами впереди и сзади больше фиксированного интервала времени, переднее транспортное средство начинает замедляться после отправки метки времени замедления заднему автомобилю. В это время задний автомобиль рассчитывает свое поведение в соответствии с текущим расстоянием.Что касается поведения, изображенного на , поскольку статическое безопасное расстояние фиксировано в начале, задняя машина сначала останавливается на t ч секунд, затем разгоняется до максимальной скорости, в то время как передняя машина разгоняется прямо до ограничение максимальной скорости.
4.2.2. Проверка эффективности предлагаемого метода
Как показано на рисунках и , можно провести дальнейший анализ ошибки между фактическим и эталонным треками. В этой статье в качестве объекта объяснения используется задняя машина, а функция масштаба используется для отображения ошибки между фактическим путем и эталонным путем в каждый момент времени.Как показано на и , мы видим, что максимальная ошибка при движении с постоянной скоростью составляет 0,35 м, а максимальная ошибка при движении с переменной скоростью составляет 0,61 м. В этом документе поддерживается согласованность параметров системы, включая поворот налево, поворот направо и разворот.
Ошибка диапазона слежения при постоянной скорости.
Ошибка диапазона слежения при переменной скорости.
Кроме того, в этой статье анализируется безопасность алгоритма. На примере поворота налево, показанного на рис. , описывается расстояние между автомобилем-хозяином и автомобилем впереди, где синяя сплошная линия указывает фактическое расстояние.Оранжевая штрихпунктирная линия представляет расстояние фиксированного временного интервала, а красная пунктирная линия представляет расстояние THW, которое определяется минимальным безопасным расстоянием переднего столкновения, которое составляет d min = v rel * T thw, здесь T thw составляет 1,2 с [33]. Фактическая кривая расстояния всегда выше, чем кривая минимального расстояния. Одним словом, безопасность алгоритма может быть гарантирована. Кроме того, расстояние между передним и задним транспортными средствами, контролируемое алгоритмом управления, близко к расстоянию фиксированного временного интервала, которое в настоящее время является стратегией управления расстоянием, обычно используемой в формации [14].
Дальнее изображение передних и задних транспортных средств.
Перекрестки и повороты | Правительство Нового Южного Уэльса
Перекрестки
Грузовикам и автобусам нужно больше места, чтобы развернуться или врезаться в поток.
Всегда оставляйте достаточно места с обеих сторон автомобиля, чтобы не задеть других участников дорожного движения или объекты.
На перекрестках вам, возможно, придется широко развернуться, чтобы повернуть налево.
На размеченных перекрестках:
- Расположите свой автомобиль таким образом, чтобы никакие транспортные средства позади не могли проехать слева от вас.
- Встаньте так, чтобы лучше видеть дорогу, на которую вы поворачиваете.
Водители автобусов и грузовиков должны начинать левый поворот дальше на перекрестке, чем автомобиль, чтобы задние колеса не наехали на бордюр.
Переход или въезд в транспортный поток
Вы должны выбрать достаточно большой промежуток в потоке транспорта, чтобы пересечь перекресток, выйти на новую улицу или слиться с движением.
Учитывайте размер и вес вашего автомобиля при пересечении перекрестков или въезде на них, смене полосы движения и выполнении других маневров.
Также помните, что загруженный автомобиль будет разгоняться медленнее, чем пустой.
Перед началом движения со стационарного положения на обочине или на разделительной полосе парковки необходимо подать сигнал не менее пяти секунд, проверить зеркала и слепые зоны.
Поворот направо с улицы с односторонним движением
Если длина вашего транспортного средства (или транспортного средства с прицепом) составляет 7,5 метров или длиннее, а сзади на нем отображается знак НЕ ОБГОНЯЙТЕ ТРАНСПОРТНОЕ СРЕДСТВО, ПОВОРАЧИВАЮЩЕЕ, вы можете повернуть направо с полосы, расположенной непосредственно слева от крайней правой полосы.
Планируйте свой поворот заранее, чтобы оказаться в правильной части перекрестка и у вас было время подать сигнал. Старайтесь не поворачивать слишком рано, потому что бок вашего автомобиля может ударить транспортные средства справа от вас, так как задняя часть вашего автомобиля врезается в поворот.
На дороге с двумя полосами для поворота направо всегда используйте крайнюю левую полосу для поворота.
Знак «Не обгонять поворачивающее транспортное средство»
Если длина вашего транспортного средства составляет 7,5 м или более, на одной из задних опознавательных табличек вы можете отобразить слова НЕ ОБГОНЯЙТЕ АВТОМОБИЛЬ, КОТОРЫЙ ПОВОРАЧИВАЕТСЯ.
Если длина вашего транспортного средства (или транспортного средства с прицепом) менее 7,5 м, вы не должны размещать этот знак сзади. Вы всегда должны поворачивать по полосам, отмеченным на дороге.
Управление перекрестками для автономных транспортных средств со связью между транспортным средством и инфраструктурой
Abstract
В этой статье предлагается стратегия управления перекрестком для автономных транспортных средств в условиях взаимодействия транспортного средства с инфраструктурой. Все транспортные средства должны быть полностью автономными и могут связываться с блоком управления перекрестком для проверки дорожной ситуации.Приоритет прохождения перекрестка определяется статической матрицей конфликтов, которая представляет потенциальный конфликт между полосами движения в разных направлениях, и динамическим информационным списком, который может фиксировать занятость каждой полосы на перекрестке в реальном времени. По сравнению с существующими подходами в литературе, блок управления перекрестком в нашей стратегии больше похож на базу данных, чем на вычислительный центр, и, следовательно, требует меньше вычислительных ресурсов и, скорее всего, удовлетворяет требованиям реального времени в условиях интенсивного движения.Моделирование проводится с использованием SUMO (Simulation of Urban MObility), в котором предлагаемая стратегия сравнивается как с фиксированным, так и с адаптивным методом светофора. Результаты показывают, что предлагаемая стратегия может значительно сократить среднюю временную задержку, вызванную перекрестком, и соответствующую дисперсию, что показывает эффективность и справедливость предлагаемой стратегии в управлении перекрестком.
Образец цитирования: Li Y, Liu Q (2020) Управление перекрестками для автономных транспортных средств со связью между транспортным средством и инфраструктурой.ПЛОС ОДИН 15(7): е0235644. https://doi.org/10.1371/journal.pone.0235644
Редактор: Фэн Чен, Университет Тонги, КИТАЙ
Получено: 30 апреля 2020 г .; Принято: 19 июня 2020 г .; Опубликовано: 2 июля 2020 г.
Copyright: © 2020 Li, Liu. Это статья с открытым доступом, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все результаты можно воспроизвести с помощью кода, опубликованного на https://github.com/TianzhenLi/Intelligent-Intersection.
Финансирование: Авторы не получали специального финансирования для этой работы.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
Введение
Перекресток играет важную роль в транспортной сети, что также является одной из основных причин дорожно-транспортных происшествий.Согласно статистическим данным, около 40% аварий, произошедших в США в 2008 г., были связаны с перекрёстками [1]. Аварии возле перекрестков также могут привести к серьезным пробкам на нескольких дорогах, что, по-видимому, приводит к пустой трате времени и денег водителей, а также к ненужному загрязнению воздуха. Также сообщается, что около 96 процентов аварий, связанных с перекрестками, произошли по критическим причинам, приписываемым водителям, таким как неадекватное наблюдение, ложное предположение о действиях других и повороты с ограниченным обзором [1, 2].
В последнее время большое внимание уделяется автономным транспортным средствам (АВ) как перспективному решению проблемы дорожно-транспортных происшествий. Как показано в официальном блоге, Waymo, компания по разработке технологий автономного вождения, основанная Google, уже запустила коммерческую службу беспилотного такси в Фениксе, штат Аризона, в 2018 году [3]. Оптимистичный прогноз состоит в том, что в следующем десятилетии беспилотники станут общедоступными, и поэтому проблемы дорожного движения, связанные с автономными транспортными средствами, также широко исследуются [4, 5].Текущие стратегии управления перекрестком (IM), такие как традиционный светофор с фиксированной фазой и другие более продвинутые адаптивные методы, предназначены исключительно для водителей-людей. В связи с быстрым развитием АВ необходимо разработать новые стратегии ИМ с учетом АВ. Поскольку связь между транспортным средством и инфраструктурой (V2I) является основным требованием будущей интеллектуальной транспортной системы (ИТС), она также должна использоваться в IM [6].
Проблема управления перекрестком, связанная с автономными транспортными средствами и V2I, была горячей темой в области ИТС в последние десятилетия.Например, Дрезнер и Стоун создали мультиагентный блок координации и управления перекрестком, основанный на технологии резервирования ресурсов перекрестка в среде V2I [7]. Когда транспортное средство въезжает в зону контроля перекрестка, оно делает запрос на пропуск в блок управления, после чего решение будет принято на основе политики «первым пришел, первым обслужен» (FCFS). Точно так же Ли и соавт. Считается, что пересечение делится на сетку из n на n плиток, где n называется гранулярностью и отражает плотность плиток сетки пересечения [8].Блок IM отправляет транспортному средству сообщение об одобрении или отклонении с заданной скоростью ускорения или замедления, которая не приведет к конфликту с существующими резервированиями. Основываясь на работе Дрезнера, Huang et al. предложил подход, учитывающий больше функций для лучшего представления реальной среды вождения [9]. Чоухан и Банда предложили интуитивный эвристический метод для решения пространственно-временных конфликтов во время вождения транспортного средства, чтобы транспортное средство могло безопасно проехать через перекресток [10].
Помимо описанных выше подходов, основанных на эвристике, задачи управления перекрестком также можно решать путем оптимизации с различными целевыми функциями. Например, Лу и Ким предложили алгоритм координации перекрестка на основе смешанного целочисленного программирования, чтобы генерировать самую быструю траекторию для каждого транспортного средства, приближающегося к перекрестку [11]. Круз-Пирис и др. использовали генетические алгоритмы для оптимизации скорости прибытия транспортных средств и разработали симулятор клеточного автомата для моделирования различных дорожных сцен [12].Чжао и др. решили задачу многокритериальной оптимизации в условиях множественных ограничений подключенных транспортных средств и автоматизированных транспортных средств на несигнальных перекрестках [13]. Чжан и др. изучали, как минимизировать потребление энергии подключенными и автономными транспортными средствами на городских перекрестках, а также удовлетворить требование максимизации пропускной способности [14]. Кремерс и др. предложил алгоритм ИМ, основанный на моделирующем прогнозирующем управлении (MPC), для уменьшения среднего времени задержки транспортных средств [15]. Ву и др.предложил децентрализованную стратегию обучения координации для оптимизации политики управления [16].
Большинство описанных в литературе стратегий АД требуют, чтобы блок АД обладал высокой вычислительной мощностью для решения задач оптимизации или расчета надлежащей скорости ускорения и замедления приближающихся транспортных средств в режиме реального времени. В этой статье мы предлагаем стратегию IM, которая ослабляет это требование. В нашей стратегии модуль обмена мгновенными сообщениями больше похож на базу данных, чем на вычислительный центр, и, следовательно, требует меньше вычислительных ресурсов и, скорее всего, удовлетворяет требованиям реального времени в ситуациях с интенсивным трафиком.
Вклад этой статьи заключается в следующем. Мы предлагаем стратегию обмена мгновенными сообщениями, учитывающую связь между транспортным средством и инфраструктурой. Блок IM хранит информацию, отражающую текущее занятие перекрестка. Прибывающее транспортное средство может получить информацию о дорожном движении, как только оно войдет в зону действия IM-модуля, а затем соответствующим образом отрегулировать свою скорость, чтобы обеспечить въезд на перекресток не ранее безопасного времени прибытия. Все тяжелые вычислительные задачи выполняются на стороне транспортного средства, что значительно снижает нагрузку на блок АД.Моделирование проводится с использованием SUMO (Моделирование городской мобильности), и результаты показывают, что предложенная стратегия может значительно сократить среднее время задержки, вызванное перекрестком, по сравнению с широко используемыми методами светофора.
Формулировка задачи
Параметры среды перекрестка
Существуют различные формы перекрестков. Для простоты описания мы сосредоточимся на широко известном четырехстороннем перекрестке (или называемом перекрестком), показанном на рис. 1.Предполагается, что нашу стратегию можно легко распространить на множество других форм пересечений.
Есть 12 входящих полос. Каждая полоса имеет уникальный идентификатор r i ( i = 0, 1, ⋯, 11), пронумерованный по часовой стрелке, начиная с самого верхнего. Простота этого перекрестка заключается в том, что каждая полоса имеет только одно исходящее направление. То есть маршрут транспортного средства в зоне перекрестка может быть однозначно представлен соответствующей полосой движения, что значительно упрощает анализ.
Предположения
Прежде чем разрабатывать стратегию обмена мгновенными сообщениями, нам необходимо четко представлять ситуацию с трафиком, с которой мы сталкиваемся. Предположим, что в наших обстоятельствах всегда выполняются следующие предположения:
- Все обгоны и перестроения уже завершены, поэтому транспортные средства, движущиеся по полосе, должны следовать в направлении этой полосы.
- Все транспортные средства полностью автономны и могут двигаться по заданной полосе с заданной скоростью. Другие транспортные единицы, такие как пешеходы и машины скорой помощи, не учитываются.
- Все транспортные средства могут прекрасно связываться с блоком IM, как только они попадают в зону действия связи. То есть во время связи нет временной задержки, потери пакетов данных или злонамеренной инъекции данных. Технические детали, реализующие эту коммуникацию V2I, выходят за рамки этой статьи.
- Все оценки скорости и времени, выполненные AV, достаточно точны. Эти оценки являются основой для последующих решений, принимаемых АВ.
Управление перекрестком на основе связи V2I
Матрица конфликтов
Мы говорим, что два маршрута конфликтуют, если они пересекаются друг с другом в некоторой точке внутри зоны транспортной развязки.В ситуации, показанной на рис. 1, маршруты транспортных средств могут отражаться полосами движения, занимаемыми транспортными средствами. Следовательно, мы также можем сказать, конфликтуют две полосы или нет. Из рис. 1 мы можем выяснить, конфликтуют ли две полосы друг с другом, а затем мы можем установить матрицу конфликтов для всех полос. Строки и столбцы представляют дорожки, и если две дорожки конфликтуют друг с другом, элемент в соответствующей строке и столбце равен одному; в противном случае ноль. Полная матрица конфликтов показана в таблице 1.
Эта матрица конфликтов является статической для данной транспортной развязки и поддерживается блоком IM.Он представляет собой потенциальный конфликт между транспортными средствами, движущимися по любым полосам. Если одно транспортное средство приближается к полосе без какого-либо потенциального конфликта (например, полосы для правого поворота), транспортное средство может безопасно пересечь перекресток на желаемой скорости. В противном случае следует дополнительно проверить фактическое занятие перекрестка в режиме реального времени, что может быть отражено в динамическом информационном списке.
Информационный список
В нашем дизайне информационный список содержит список транспортных средств с соответствующей информацией:
- Идентификатор автомобиля: i ∈ {0, 1, 2, ⋯}
- Маршрут автомобилей ID: Маршрут I ∈ { R 0 , R 1 , R 2 , ⋯, R 11 }
- Время выезда транспортного средства с перекрестка: t i ∈ [0, ∞)
Этот информационный список также поддерживается блоком IM.
Далее мы опишем, как обновляется список информации и как работает вся система обмена мгновенными сообщениями.
Стратегия управления дорожным движением
Стратегия управления показана следующим образом:
- (1). Исходное состояние: информационный список пуст.
- (2). Как только транспортное средство попадает в зону действия модуля IM (может быть в сотнях метров), основная информация о транспортном средстве отправляется на устройство IM, включая его идентификатор транспортного средства, скажем, i , и его идентификатор маршрута, маршрут . и .Блок IM сначала проверяет матрицу конфликта. Если потенциального конфликта нет вообще (это происходит с транспортными средствами, поворачивающими направо), блок IM посылает транспортному средству сигнал NULL , указывающий на безопасное пересечение перекрестка, а затем переходит к шагу (4). В противном случае узнайте потенциальные конфликтные маршруты route i . Возьми Маршрут I = R 1 Например, потенциальные маршруты конфликта R 1 , R 4 , R 8 , R 10 и р 11 .
- (3). Найдите информационный список и узнайте все транспортные средства, которые в настоящее время находятся на маршрутах потенциального конфликта. Отправьте соответствующее максимальное время отъезда t max обратно на автомобиль i . Если на конфликтном маршруте нет транспортных средств, установите t max равным NULL .
- (4). Транспортное средство и регулирует свою скорость в соответствии с информацией обратной связи от блока IM. В частности, он должен убедиться, что прибыл на перекресток позже, чем t max , если сигнал обратной связи не NULL .Обратите внимание, что AV могут использовать различные методы регулировки скорости. Ориентиром является то, что транспортное средство должно проехать перекресток как можно скорее, но позже, чем t max . Также может быть принят во внимание безопасный временной интервал. Наконец, транспортное средство отправляет расчетное время выезда с перекрестка, t i , в блок IM.
- (5). Модуль IM обновляет список информации, добавляя i , route i и t i .Любое транспортное средство, покидающее перекресток, должно отправить сигнал на блок IM, чтобы блок IM мог удалить свою информацию из списка.
- (6). Повторите шаги с (2) по (5).
Блок-схема вышеперечисленных шагов показана на рис. 2, на котором этап, обведенный пунктиром, выполняется со стороны автомобиля.
Псевдокод алгоритма, выполняемого блоком АД, приведен в Алгоритме 1:
Алгоритм 1 : Поиск максимального времени выхода на конфликтных полосах
Вход : Матрица конфликтов M , информационный список L , идентификатор приближающегося транспортного средства i и идентификатор его маршрута route i
Выход : Максимальное время выхода t макс. на i конфликтных полосах
1: если маршрут i не имеет конфликтной полосы в M то
2: t макс. = NULL
3: еще
4: foreach конфликтный переулок r k в M до
5: Получить время выхода t k на полосу r k из L
6: конец
7: t max = max{ t k }
8: конец
В нашей стратегии IM блок IM в основном выполняет работу по поиску в таблице и сообщает транспортному средству самое раннее безопасное время прибытия.Транспортное средство отвечает за корректировку скорости и оценку времени прохождения перекрестка. По сравнению с описанными в литературе подходами, в которых блок IM должен вычислять пониженную скорость с помощью схемы резервирования или метода оптимизации, наша стратегия требует меньшей вычислительной мощности на стороне блока IM и, скорее всего, будет работать в условиях интенсивного трафика.
Моделирование в SUMO
Для проверки эффективности предлагаемой стратегии IM мы проводим моделирование с использованием инструмента моделирования дорожной системы с открытым исходным кодом — SUMO (Simulation of Urban MObility) и его расширения Plexe [17, 18].Мы рассматриваем среду пересечения, показанную на рис. 1. Параметры моделирования перечислены следующим образом:
- Расстояние от начальной точки каждой дороги до стоп-линии перед перекрестком составляет 500 метров.
- Расстояние от стоп-линии до центра перекрестка 15 метров.
- Предположим, что блок IM расположен в центре перекрестка и дальность связи блока IM составляет 200 метров.
- Нормальная скорость автомобиля 60 км/ч, то есть около 16.67 м/с.
- Длина автомобиля 4 метра.
Для других параметров установлены значения по умолчанию, предоставленные SUMO.
В нашей стратегии IM мы не указываем, как транспортное средство регулирует скорость. Любой метод приемлем, если транспортное средство прибывает на перекресток после t max + t δ , где t max max конфликтных полос и t δ = 1 с — дополнительное время безопасного промежутка.В моделировании мы используем упрощенный метод регулировки скорости: как только транспортное средство получает t max , если требуется снижение скорости, оно регулирует скорость до D /( t max + 0 + 0 T Δ — T — T C ), где D — это расстояние от текущего положения автомобиля до линии остановки и T C — это текущее время.
В целях сравнения мы также исследуем традиционный светофор с фиксированной фазой и адаптивный светофор. В традиционном светофоре используется трехфазная схема синхронизации сигнала с общим циклом сигнала 120 секунд, в котором зеленый свет для движения прямо в каждом направлении составляет 30 секунд, желтый свет 5 секунд, зеленый свет для поворота налево 20 секунд. секунд, желтый свет 5 секунд, а затем красный свет на остальное время. Диаграмма фазового превращения представлена на рис. 3.
Адаптивный светофор отслеживает количество транспортных средств в режиме реального времени с помощью индуктивных петлевых детекторов, которые устанавливаются за 15 метров до стоп-линии перекрестка. Если обнаружено приближающееся транспортное средство, а в это время горит зеленый свет светофора, то светофор автоматически продлевает зеленую фазу на 5 секунд. Максимальная продолжительность зеленого света составляет 45 секунд. Если транспортное средство не обнаружено в течение 5 секунд до окончания фазы зеленого света, свет переключается на следующую фазу.Диаграмма фазового превращения (только с учетом направления восток-запад) показана на рис. 4.
Все коды моделирования доступны в следующем репозитории Github: https://github.com/TianzhenLi/Intelligent-Intersection. Результаты можно воспроизвести, следуя инструкции. Также предоставляются окончательные файлы статистических данных, которые могут дать точно такие же результаты, как и в нашей статье.
Моделирование 1: одинаковая плотность движения на каждой полосе
Первая симуляция учитывает одинаковую плотность движения на каждой полосе, в которой транспортные средства генерируются каждые 6 секунд с вероятностью 0.3 в начальной точке каждой дорожки.
Для количественной оценки эффективности IM-стратегий мы используем два показателя: среднее время задержки всех транспортных средств и соответствующую дисперсию σ 2 . Из файла статистических данных, созданного SUMO, мы извлекаем время задержки каждого транспортного средства d i , i ∈ {1, 2, …, N } и вычисляем и σ 2 следующим образом:
Интуитивно понятно, что среднее время задержки представляет собой эффективность стратегии обмена мгновенными сообщениями, а дисперсия времени задержки может сказать нам, насколько справедливой является стратегия.Хорошая стратегия должна приводить как к небольшому среднему времени задержки, так и к небольшой дисперсии. Из Таблицы 2 видно, что предложенная стратегия намного лучше других, а адаптивный свет немного лучше, чем традиционный свет с фиксированной фазой. Основная причина заключается в том, что в нашей стратегии транспортные средства могут связываться с блоком IM и изменять свою скорость в соответствии с информацией обратной связи о занятии перекрестка. Благодаря заблаговременной корректировке транспортные средства могут безопасно проехать перекресток без лишних остановок, а в большинстве случаев требуется только снижение скорости.
Моделирование 2: несбалансированная плотность трафика
В приведенном выше моделировании плотность движения во всех направлениях почти одинакова. Теперь рассмотрим перекресток с неравномерной плотностью движения в разных направлениях. Мы установили, что количество транспортных средств, прибывающих с дороги север-юг, намного больше, чем с дороги восток-запад. В моделировании автомобили генерируются каждые 6 секунд с вероятностью 0,3 в направлении север-юг, а с вероятностью 0.03 в направлении восток-запад.
Снова мы исследуем три стратегии IM и показываем результат в Таблице 3.
Результаты показывают, что предложенная нами стратегия по-прежнему достаточно эффективна в этой ситуации с несбалансированной плотностью трафика. Более того, сравнивая таблицы 2 и 3, мы видим, что адаптивный светофор вполне подходит для несбалансированной дорожной ситуации. Благодаря адаптивной настройке фаза зеленого света для направления север-юг намного длиннее, чем в другом направлении, что правильно отражает различную плотность движения.
Моделирование 3: влияние плотности трафика
В этой части мы исследуем влияние плотности трафика на три стратегии обмена мгновенными сообщениями. Временные интервалы для генерации транспортных средств выбраны равными 3 секундам, 6 секундам, 9 секундам и 12 секундам соответственно. Результаты показаны в таблице 4. Для более наглядного понимания мы также наносим результаты на рис. 5 и 6.
Рис. 5. Сравнение среднего времени задержки при использовании трех стратегий управления трафиком при различной плотности трафика.
По оси абсцисс отложен временной интервал генерации транспортных средств в начальной точке дороги. Небольшое значение соответствует ситуации с интенсивным движением. Линия, обозначенная T , представляет собой традиционный светофор, A — адаптивный свет, а I — предлагаемую интеллектуальную стратегию.
https://doi.org/10.1371/journal.pone.0235644.g005
Из моделирования можно сделать следующие выводы:
- Среди трех стратегий наша имеет минимальную среднюю временную задержку и дисперсию и, следовательно, самую высокую эффективность движения на перекрестке, как для ситуаций с интенсивным, так и с легким движением.
- Для ситуаций с небольшим дорожным движением адаптивный метод явно лучше, чем традиционный светофор. Когда в одном направлении движется много транспортных средств, соответствующее продление фазы зеленого света для этого направления может сократить ненужное время ожидания и повысить эффективность движения.
- По мере увеличения плотности движения (т.е. временной интервал генерации транспортных средств уменьшается с 12 секунд до 3 секунд) средняя задержка и ее дисперсия при традиционном и адаптивном освещении быстро увеличиваются.В крайнем случае будет установлена одиночная очередь транспортных средств. Однако на нашу стратегию почти не влияет большой трафик. Из рис. 5 и 6 видно, что средняя задержка и ее дисперсия остаются на низком уровне.
- В ситуации с довольно интенсивным движением (например, случай 3s) как традиционное, так и адаптивное освещение имеют низкую эффективность. Адаптивный метод не имеет явных преимуществ по сравнению с традиционным.
- Согласно расчетам, по сравнению с адаптивными светофорами наша стратегия может сократить время задержки в среднем на 90 процентов, а по сравнению с традиционными светофорами наша стратегия может сократить время задержки в среднем на 94 процента.
Заключение и будущая работа
В этом документе мы предлагаем стратегию управления перекрестком, основанную на связи между транспортным средством и инфраструктурой. В отличие от существующих подходов в литературе, наша стратегия снимает тяжелую вычислительную нагрузку с центрального блока управления, которому теперь нужно только поддерживать статическую матрицу конфликтов и динамический список информации, а также выполнять такие задачи, как хранение и поиск. Моделирование с использованием SUMO показывает, что наш метод имеет гораздо более высокую эффективность и справедливость трафика по сравнению с традиционным фазово-фиксированным и адаптивным светофором.
Стратегия управления перекрестком, предложенная в этой статье, по существу является эвристической. Вероятно, это не самый оптимальный вариант. Лучший алгоритм может включать решение задач оптимизации на стороне транспортного средства, если мы не хотим увеличивать вычислительную нагрузку на центральный блок управления. Некоторые перспективные направления исследований перечислены ниже:
- Множественные пересечения: Стратегия обмена мгновенными сообщениями могла бы систематически учитывать множественные пересечения восходящего и нисходящего потоков для повышения общей эффективности сети трафика.
- Группировка транспортных средств: с появлением технологии связи между транспортными средствами объединение транспортных средств с небольшим безопасным расстоянием является многообещающим решением для увеличения пропускной способности дорог и снижения энергопотребления.
- Сосуществование автономных транспортных средств и транспортных средств, управляемых человеком: автономные транспортные средства не смогут полностью заменить транспортные средства, управляемые человеком, за короткое время. В ближайшем будущем на дорогах будут сосуществовать автономные и управляемые человеком транспортные средства. Следовательно, необходимо управление перекрестком с учетом такого сосуществования.
- Оптимизация траектории: Предоставление транспортным средствам большей свободы для оптимизации своих решений (например, обгон и перестроение) вблизи зоны перекрестка может еще больше повысить эффективность движения.
Каталожные номера
- 1. Чой Э. Факторы аварии в авариях, связанных с перекрестком: точка зрения на месте происшествия. Технический отчет НАБДД. Отчет № DOTHS811366, 2010 Сентябрь
- 2. Чен Ф., Сонг М., Ма С. Исследование тяжести травм водителей при столкновениях автомобилей сзади с использованием двумерной упорядоченной пробит-модели со случайными параметрами.Общественное здравоохранение Int J Environ Res. 2019; 16: 2632.
- 3. Чу Д. Waymo One: год новинок. https://blog.waymo.com/2019/12/waymo-one-year-of-firsts.html (2019 г., по состоянию на 20 апреля 2020 г.).
- 4. Chen F, Song M, Ma X, Zhu X. Оцените влияние различных режимов бокового управления автономных грузовиков на характеристики асфальтового покрытия. Transp Res Part C Emerg Technol. 2019; 103: 17–29.
- 5. Чен Ф., Сонг М., Ма С. Схема бокового управления автономными транспортными средствами с учетом устойчивости дорожного покрытия.J Чистый Продукт. 2020; 256: 120669.
- 6. Директива 2010/40/ЕС Европейского парламента и Совета. https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32010L0040&from=EN (2010 г., по состоянию на 20 апреля 2020 г.).
- 7. Дреснер К., Стонг П. Многоагентное управление дорожным движением: механизм управления перекрестком на основе резервирования. В: Материалы 3-й международной совместной конференции по автономным агентам и мультиагентным системам (AAMAS), Нью-Йорк, США, 19-23 июля 2004 г., стр.1-8.
- 8. Ли З., Читтури М.В., Чжэн Д., Билл А.Р., Нойс Д.А. Моделирование автономного управления перекрестком на основе резервирования в VISSIM. Transp Res Rec. 2013; 2381: 81–90.
- 9. Хуанг С., Садек А.В., Чжао Ю. Оценка мобильности и экологических преимуществ интеллектуальных перекрестков на основе резервирования с использованием интегрированного симулятора. IEEE Trans Intel Transp Syst. 2012 г.; 13: 1201–1214.
- 10. Чоухан А.П., Банда Г. Автономное управление перекрестками: эвристический подход.IEEE-доступ. 2018; 6: 53287–53295.
- 11. Лу К., Ким К. Подход смешанного целочисленного программирования для автономного и связанного управления движением на пересечении перекрестков. В: Материалы 88-й конференции по автомобильным технологиям IEEE, Чикаго, США, 27–30 августа 2018 г.
- 12. Круз-Пирис Л., Лопес-Кармона М.А., Марса-Маэстре И. Автоматическая оптимизация пересечений с использованием генетического алгоритма IEEE Access. 2019; 7: 15452–15468.
- 13. Чжао С, Ван Дж, Чен И, Инь Г.Многоцелевое совместное планирование CAV на нерегулируемом перекрестке. В материалах 21-й международной конференции по интеллектуальным транспортным системам, Гавайи, США, 4–7 ноября 2018 г., стр. 3314–3319.
- 14. Zhang Y, Malikopoulos A, Cassandras C. Децентрализованное оптимальное управление подключенными и автоматизированными транспортными средствами на перекрестке. В: Материалы 56-й конференции IEEE по решениям и управлению (CDC), Мельбурн, Австралия, 12–15 декабря 2017 г., стр. 4428–4433.
- 15.Кримерс Ф., Моралес Медина А.И., Лефебер Э., ван де Вау Н. Проектирование диспетчерского контроллера для совместного управления перекрестком с использованием модели прогнозирующего управления. В: Материалы 5-й конференции IFAC по анализу и контролю хаотических систем, Эйндховен, Нидерланды, 30 октября — 1 ноября 2018 г., стр. 74–79.
- 16. У И, Чен Х, Чжу Ф. DCL-AIM: Децентрализованное координационное обучение автономному управлению перекрестком для подключенных и автоматизированных транспортных средств. Transp Res Part C Emerg Technol.2019; 103: 246–260.
- 17. Лопес П.А., Бериш М., Бикер-Вальц Л., Эрдманн Дж., Флоттерёд Ю.П., Хилбрих Р. и соавт. Микроскопическое моделирование трафика с использованием SUMO. В: Материалы 21-й международной конференции IEEE по интеллектуальным транспортным системам, Мауи, США, 4-7 ноября 2018 г., стр. 2575-2582.
- 18. Сегата М., Йорер С., Блёссл Б., Соммер С., Дресслер Ф., Чиньо Р.Л. PLEXE: взводное расширение для Veins. В: Материалы 6-й конференции IEEE по автомобильным сетям, Падерборн, Германия, 3-5 декабря.2014. С. 53-60.
Предупреждение о выходе из полосы движения и помощь в удержании полосы движения
Самые удобные системы удержания полосы движения: Genesis, Tesla, Kia, Cadillac
Многим владельцам Genesis понравилась их система LKA: «Позволяет мне проезжать большие расстояния за день, более расслабленно, делая длительные поездки менее требовательными ко мне и, следовательно, меньше устаю», — сказал один из них.
Владелец Cadillac написал: «Это хорошая система. Если я попытаюсь перестроиться, не подавая сигнала поворота, меня вернет обратно.Заставляет меня более осознанно использовать сигнал поворота».
Наименее удовлетворительная система удержания полосы движения: Audi, Honda, Lincoln, Acura
Многие владельцы Audi возлагали большие надежды на свою систему. Один владелец A8 написал: «Он работает только с перерывами, даже когда разметка полосы идеальна». Водитель A6 добавил: «Больше неприятностей в нормальных условиях. Если бы я думал, что могу быть сонным, я мог бы задействовать его — в противном случае я держу его незадействованным».
Владелец Honda CR-V написал: «Это очень ненадежно.Часто он отказывается определять полосы движения, особенно в ночное время и даже в дождливую погоду. Это также непредсказуемо с некоторыми умеренными поворотами на шоссе». Водитель Honda Odyssey добавил: «Я обнаружил, что функция помощи при движении по полосе доставляет неудобства. Он обнаруживает выезды из полосы движения, когда их нет, и сбивается с толку из-за разметки».
Мнение CR: Системы LDW могут помочь сонливым или рассеянным водителям оставаться в безопасности. Предупреждения также служат хорошим напоминанием о необходимости использовать сигнал поворота при смене полосы движения.Но системы, которые слишком чувствительны и имеют много раздражающих ложных срабатываний, особенно звуковых предупреждений, могут заставить водителей отключать их, сводя на нет их преимущества. При использовании LKA широкое место для велосипедиста или пешехода может привести к тому, что система попытается повернуть назад к велосипедисту или пешеходу, поэтому всегда будьте начеку. Большинство систем требует от водителей держать руки на руле. Но легкое удерживание руля — чтобы система не выдавала предупреждение — не означает, что водитель обращает внимание на дорогу.
https://www.hudsonvalleytraveler.com/ — Транзитные автомобили с фиксированным маршрутом Dutchess LOOP
Транзитные транспортные средства с фиксированным маршрутом Dutchess LOOP — функциональные возможности OBE транспортного средства
Описание подсистемы
Бортовое оборудование автомобиля (OBE) обеспечивает функции датчиков, обработки, хранения и связи, которые обеспечивают эффективное, безопасное и удобное путешествие. Автомобильный OBE включает в себя общие возможности, применимые к легковым автомобилям, грузовикам и мотоциклам.Многие из этих возможностей (например, см. пакеты услуг «Безопасность транспортных средств») применимы ко всем типам транспортных средств, включая личные автомобили, коммерческие автомобили, автомобили скорой помощи, транзитные автомобили и автомобили техобслуживания. С этой точки зрения бортовой компьютер транспортного средства включает в себя общие интерфейсы и функции, применимые ко всем моторизованным транспортным средствам. Радиостанции, поддерживающие связь V2V и V2I, являются ключевым компонентом OBE транспортного средства. Варианты как односторонней, так и двусторонней связи поддерживают широкий спектр информационных услуг от базовой широковещательной передачи до расширенных персонализированных информационных услуг.Возможности ведения по маршруту помогают в составлении оптимального маршрута и пошаговом сопровождении по маршруту путешествия. Усовершенствованные датчики, процессоры, усовершенствованные интерфейсы для водителя и приводы дополняют информационные услуги для водителя, так что, в дополнение к информированному выбору режима и маршрута, водитель перемещается по этим маршрутам более безопасным и последовательным образом. Этот физический объект поддерживает все шесть уровней автоматизации вождения, как определено в SAE J3016. Первоначальные функции предотвращения столкновений обеспечивают возможность предупреждения водителя «бдительным вторым пилотом».Более продвинутые функции предполагают ограниченный контроль над автомобилем для сохранения положения в полосе движения и безопасного движения вперед. В самых передовых реализациях этот физический объект поддерживает полную автоматизацию всех аспектов задачи вождения, чему способствует связь с другими транспортными средствами поблизости и координация с вспомогательными подсистемами инфраструктуры.
Функциональный объект: Аварийное оповещение автомобиля
«Аварийное оповещение автомобиля» позволяет водителям или датчикам обнаружения столкновений сообщать о чрезвычайной ситуации и вызывать помощь.Он собирает данные с бортовых датчиков обнаружения столкновений, предоставляет водителю механизм вызова помощи и включает в себя возможность связи для сообщения о столкновении, включая индикаторы серьезности столкновения, количество пассажиров и информацию о транспортном средстве, которая может повлиять на столкновение. ответ.
Функциональный объект: Локальный маршрут для транспортных средств
«Локальный маршрут для транспортных средств» обеспечивает планирование маршрута и пошаговое руководство по маршруту для водителя с использованием вычислительных ресурсов и цифровой карты на борту транспортного средства.Сюда входят автономные системы, которые не настроены на получение или обработку информации в реальном времени, а также системы, оборудованные для получения информации о трафике и дорожных условиях в реальном времени от инфраструктуры, которая учитывается в алгоритмах выбора маршрута и навигации.
Функциональный объект: определение местоположения автомобиля
«Определение местоположения автомобиля» получает текущее местоположение автомобиля и предоставляет эту информацию автомобильным приложениям, которые используют информацию о местоположении для предоставления услуг ИТС.
Функциональный объект: Мониторинг безопасности транспортных средств
«Мониторинг безопасности транспортных средств» контролирует критически важные компоненты транспортного средства и предупреждает водителя о проблемах безопасности. Эти возможности обеспечивают бортовые датчики, которые отслеживают состояние и характеристики автомобиля, включая рулевое управление, торможение, ускорение, выбросы, расход топлива, работу двигателя и т. д.
Этот функциональный объект также может отслеживать состояние водителя и предупреждать водителя о возможных вопросы безопасности.Он включает в себя датчики и возможности мониторинга поведения, которые оценивают пригодность водителя (например, физическую форму и бдительность) для принятия на себя или сохранения ручного управления транспортным средством.
Функциональный объект: прием информации о пассажирах транспортных средств
«Прием информации о пассажирах транспортных средств» предоставляет водителям возможность получать общую транспортную информацию, включая информацию о дорожном движении и дорожных условиях, правила дорожного движения, информацию о происшествиях, информацию о техническом обслуживании и строительстве, информацию о событиях, информацию о транзите, информация о парковке, информация о погоде и широковещательные оповещения.
Тесла «Полное самостоятельное вождение» v10.8 Текущий обзор — часть 3
Ниже приводится дополнительная сводка того, что Tesla «Full Self Driving» (FSD) v10.8 работает хорошо и имеет проблемы.
Автоматическая смена полосы движения Программное обеспечениеTesla Full Self-Driving (FSD) отлично справляется с замедлением или ускорением, чтобы безопасно вписаться в довольно маленькое место при смене полосы движения. Даже при вождении только с Autosteer я почти всегда инициировал перестроение с помощью сигнала поворота, а не вручную.У меня нет глаз на затылке, но у моей машины есть (так сказать).
Одно место, где он слабее, заключается в том, что он не так искусен, как довольно агрессивный водитель-человек, который понимает, что он / она должен перестроиться в несколько полос, чтобы не пропустить поворот или выезд.
ГлупостиС FSD (v10.5 и v10.8) машина также делает много глупостей — например, выезжает не в ту полосу, не успевает вовремя в полосу поворота, проезжает знак остановки, вообще пропускает повороты и т. д.
Мой опыт показывает, что FSD сигнализирует и плавно перемещается в полосу поворота, но довольно поздно. Несвоевременное вхождение в полосу поворота обычно связано с недостаточным планированием заранее. Водитель-человек оценит расстояние до ожидаемого поворота или съезда, а также загруженность дорог, чтобы вовремя оказаться на полосе поворота. С FSD вы иногда будете пропускать свою очередь, потому что программное обеспечение не может планировать достаточно заранее для данной ситуации.
Я также сталкивался с ситуациями, когда ошибки в навигации и контроле скорости кажутся проблемой с картой, которую использует программное обеспечение.Я знаю ситуации, когда изменения, связанные с относительно новым строительством автомагистралей — и всегда со строящимися автомагистралями — вызывают ошибки навигации, потому что карты не обновлены. Я также знаю ситуации, когда вы находитесь на трассе с ограниченным доступом с ограничением скорости 70 миль в час, и вдруг карта дает ограничение скорости 30 миль в час, и машина начинает тормозить. Судя по всему, автомобиль набирает ограничение скорости с ближайшей городской улицы или перекрёстка. Эта проблема также существовала со старым круиз-контролем с учетом трафика (TACC).Вам нужно слегка нажимать на педаль акселератора, чтобы добавить газ, если это необходимо в таких ситуациях.
Резюмируя: Эти проблемы с неточными картами существовали с интеллектуальным круиз-контролем и автоматическим рулевым управлением до того, как я получил доступ к бета-версии FSD, но версии FSD v10.5 и v10.8 никак не решают их.
Лежачие полицейскиеКак правило, если ваша скорость установлена на 30 миль в час (на пять миль в час больше 25 миль в час), ваша Tesla с активированным FSD будет пролетать над лежачим полицейским достаточно быстро, чтобы повредить вашу машину.Я видел только один случай, когда машина явно притормозила из-за заметного лежачего полицейского.
Проезжая мимо знака «Стоп», о боже!В Сент-Джордже, штат Юта, есть один знак остановки, который поднимается на высоту 1650 Вт и поворачивает налево или направо на оживленный бульвар Сноу-Каньон, где FSD будет постоянно использовать знак остановки. Это поведение сохраняется в FSD v10.8. Моя Тесла будет законно останавливаться на всех других знаках остановки, с которыми я сталкивался.
Решение: Выключите FSD и выполните поворот вручную. (Примечание: я повторно проверяю поведение только при отсутствии перекрестного трафика.)
Сообщение Илону Маску и его инженерам-программистам FSD: ПОЖАЛУЙСТА, ИСПРАВЬТЕ ЭТО!!
Это очень опасно, и я даже не знаю, как это возможно, что FSD выходит из строя только в этом конкретном случае. Если кто-то в Tesla читает это или кто-то знает, как передать им сообщение, пожалуйста, сообщите им об этом. Я был бы очень рад работать с ними, чтобы решить эту проблему.
Испытайте пределы, получите действительно сумасшедшие вещиЕсли вы проверите пределы FSD, будьте готовы немедленно вмешаться и быть готовым к некоторым действительно сумасшедшим вещам.Прошлым вечером в темноте я столкнулся с пикапом с включенными фарами на моей полосе движения. Я был рад видеть, что моя машина движется влево, чтобы избежать пикапа, но как только я проехал мимо, машина начала поворачивать налево на улицу, которая не была запрограммирована в моей системе навигации.
Иногда при выполнении поворота автомобиль поворачивает на велосипедную дорожку или на широкую полосу у бордюра, которая не является полосой движения. Лучше сразу вмешаться. Хотя, как правило, машина в конце концов находит реальную полосу движения, если вы не вмешиваетесь.
При выезде с парковки в очень сложных ситуациях рулевое колесо будет сильно дергаться вперед и назад и иногда находить тупик, а не выход.
Решение. Если вы не хотите видеть сумасшедшие вещи, не тестируйте FSD в крайних ситуациях.
Еще раз…Я, моя жена Мэри, Зуни, мой электровелосипед и наша Tesla Model 3 в национальном парке Зайон в штате Юта. 10 января 2022 г.
Я очень рад быть среди немногих привилегированных в мире, у которых есть это программное обеспечение FSD , и я буду продолжать наслаждаться тем, что он делает так хорошо, и выключать его, подталкивать его и быть готовым к небольшому давлению на ускоритель для вещей, которые он делает не так хорошо.
Радикальное обновление пользовательского интерфейса к Рождеству 2021 годаПоложительным моментом получения радикально нового пользовательского интерфейса является то, что это похоже на превращение вашего старого автомобиля в совершенно новый автомобиль. Это аналогично изменениям, которые пользователи Apple и Microsoft часто видели в своих интерфейсах на протяжении многих лет.
Обратной стороной является то, что это заставляет вас чувствовать, что вы находитесь в совершенно новой машине, и вам нужно заново изучать, как она работает. Мой первоначальный опыт показывает, что Tesla отлично справилась с новым пользовательским интерфейсом, и во многих случаях он более интуитивно понятен, чем старый интерфейс.Однако Зак Шахан считает, что мультимедийный интерфейс на самом деле хуже. [Примечание редактора: я впервые помню, как получил обновление, которое, как мне казалось, ухудшило настройку информационно-развлекательной системы. Многие, многие другие владельцы Tesla также жаловались на это, в том числе многие, кто на самом деле не жалуется на дела Tesla. Я предполагаю, что некоторые исправления будут сделаны со временем. —Зак]
Несколько изменений пользовательского интерфейса, которые я заметилВнешний вид многих функций был радикально изменен благодаря новому пользовательскому интерфейсу.
Водитель и пассажир имеют отдельные органы управления обогревателем и подогревом сидений в крайнем левом и крайнем правом углу экрана. Это гораздо более интуитивно понятно, как только вы это поймете. [Примечание редактора: одна из проблем, с которыми мы столкнулись, заключается в том, что они больше не видны все время, и были времена, когда мой оставляли на обогреве уровня 1, и я не осознавал этого, даже когда день прогрелся, и я кондиционер включил, чтобы охладить. (Я живу во Флориде.) Кроме того, эти настройки теперь требуют дополнительных кликов для настройки, что совсем не удобно во время вождения.Это также одна из главных вещей, из-за которых я видел других очень расстроенных. —Зак]
Я слушаю кабельные новости и местную новостную станцию: новый интерфейс упрощает их поиск, как только вы в них разберетесь.