Приоритет маршрутных транспортных средств: Приоритет маршрутных транспортных средств. ПДД
Приоритет маршрутных транспортных средств — текст правил дорожного движения
18.1Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
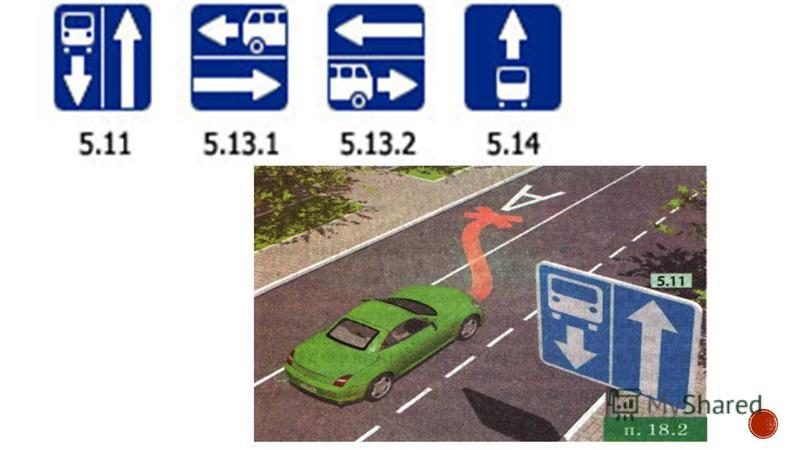
18.2На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11.1, 5.13.1, 5.13.2 и 5.14, запрещаются движение и остановка других транспортных средств на этой полосе, за исключением:
(в ред. Постановления Правительства РФ от 04.12.2018 N 1478)
школьных автобусов; (в ред. Постановления Правительства РФ от 04.12.2018 N 1478)
транспортных средств, используемых в качестве легкового такси; (в ред. Постановления Правительства РФ от 04.12.2018 N 1478)
транспортных средств, которые используются для перевозки пассажиров, имеют, за исключением места водителя, более 8 мест для сидения, технически допустимая максимальная масса которых превышает 5 тонн, перечень которых утверждается органами исполнительной власти субъектов Российской Федерации — гг.

транспортных средств, которыми в период с 23 февраля по 14 марта 2019 г. перевозятся определенные Правительством Красноярского края по согласованию с Министерством транспорта Российской Федерации, Министерством внутренних дел Российской Федерации и автономной некоммерческой организацией «Исполнительная дирекция XXIX Всемирной зимней универсиады 2019 года в г. Красноярске» клиентские группы (представители национальных федераций студенческого спорта, участники спортивных соревнований, представители Международной федерации студенческого спорта (FISU), представители средств массовой информации, технические официальные лица, иные лица, принимающие участие в мероприятиях XXIX Всемирной зимней универсиады 2019 года в г. Красноярске), при наличии аккредитационного свидетельства, выдаваемого автономной некоммерческой организацией «Исполнительная дирекция XXIX Всемирной зимней универсиады 2019 года в г.
Красноярске». (в ред. Постановления Правительства РФ от 04.12.2018 N 1478)


На полосах для маршрутных транспортных средств разрешено движение велосипедистов в случае, если такая полоса располагается справа.
(в ред. Постановления Правительства РФ от 04.12.2018 N 1478)
Водители транспортных средств, допущенных к движению по полосам для маршрутных транспортных средств, при въезде на перекресток с такой полосы могут отступать от требований дорожных знаков 4.1.1 — 4.1.6, 5.15.1 и 5.15.2 для продолжения движения по такой полосе.
(в ред. Постановления Правительства РФ от 04.12.2018 N 1478)
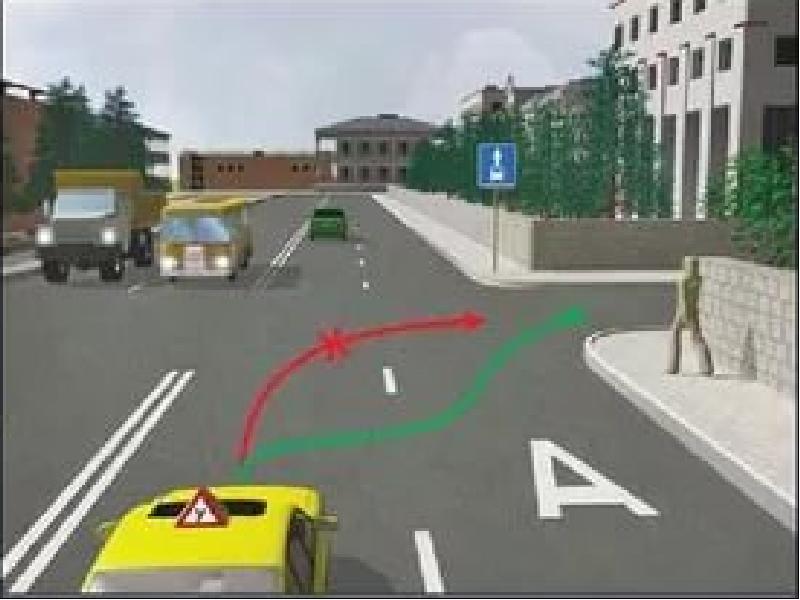
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, что это не создает помех маршрутным транспортным средствам.
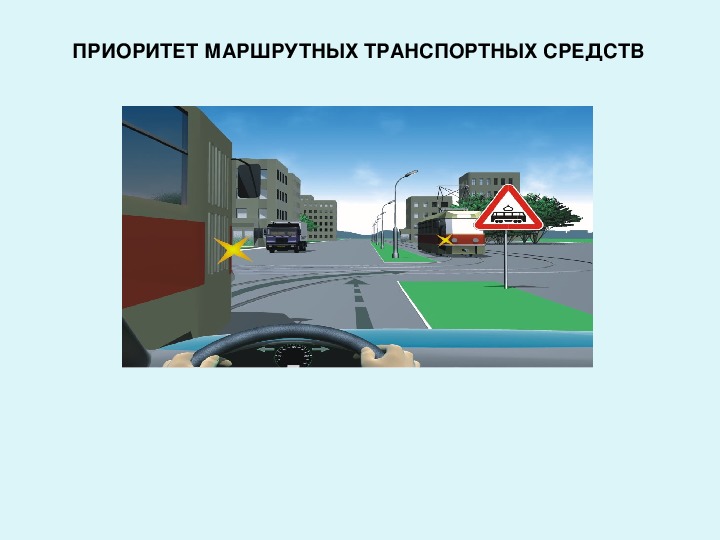
18.3В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенного места остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
(в ред. Постановления Правительства РФ от 25.09.2003 N 595)
Дата обновления: 5 октября 2020 г.
18. Приоритет маршрутных транспортных средств — ПДД РФ
18.1. Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
18.2. На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11.1 , 5.13.1 , 5.13.2 и 5.14 , запрещаются движение и остановка других транспортных средств на этой полосе, за исключением:
- школьных автобусов;
- транспортных средств, используемых в качестве легкового такси;
- транспортных средств, которые используются для перевозки пассажиров, имеют, за исключением места водителя, более 8 мест для сидения, технически допустимая максимальная масса которых превышает 5 тонн, перечень которых утверждается органами исполнительной власти субъектов Российской Федерации — гг. Москвы, Санкт-Петербурга и Севастополя;
- На полосах для маршрутных транспортных средств разрешено движение велосипедистов в случае, если такая полоса располагается справа.
 Москвы, Санкт-Петербурга и Севастополя;
Москвы, Санкт-Петербурга и Севастополя;Водители транспортных средств, допущенных к движению по полосам для маршрутных транспортных средств, при въезде на перекресток с такой полосы могут отступать от требований дорожных знаков
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, что это не создает помех маршрутным транспортным средствам.
18.3. В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенного места остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
приоритет маршрутных
Главная / Полезные ссылки / материалы к экзамену / Основы законодательства в сфере дорожного движения (ПДД) / приоритет маршрутныхПриоритет маршрутных транспортных средств.
Водителю важно помнить, что трамвай, находясь в равных условиях с автомобилем, имеет преимущество.
Однако есть два исключения.
При выезде из ДЕПО трамвай преимущества не имеет. По сути, выезд из депо – это выезд с прилегающей территории. Поэтому этот выезд имеет статус второстепенной дороги.
Кроме того, когда трамвай движется под разрешающий сигнал светофора в дополнительной секции при основной красной, он должен уступать всем транспортным средствам, движущимся с других направлений. Напомним, что это же правило действует и для всех других водителей.
Чем бы мы с вами не управляли, мопедом, легковым или грузовым автомобилем, гужевой повозкой или трамваем, в любом случае, если мы движемся под разрешающий сигнал в дополнительной секции светофора при основной красной, мы должны уступать дорогу всем транспортным средствам, движущимся с других направлений.
По полосе для маршрутных транспортных средств могут двигаться только маршрутные транспортные средства и с 13 апреля 2012 г. ещё и легковые такси.
Нам с вами въезжать в такую полосу разрешается только через прерывистую линию горизонтальной разметки для посадки-высадки пассажира и для поворота направо. Возможны нюансы, связанные с применением других знаков. Если над полосой для маршрутных транспортных средств, которая может быть обозначена также буквой «А» на проезжей части, висит также знак 3.1 «Кирпич», то нам с вами в эту полосу вообще въезжать запрещено. Если под знаком 5.14 «Полоса для маршрутных транспортных средств» висит табличка в виде перекрещивающихся молоточков «Рабочие дни», то это значит, что в выходные дни здесь нет никакой полосы для маршрутных транспортных средств и, следовательно, в выходные и праздничные дни мы с вами можем по ней спокойно ездить. Если над такой полосой висит «Кирпич», а под ним те же «Молоточки», то это значит, что «Кирпич» действует только в рабочие дни, и поэтому в рабочие дни мы с вами в эту полосу не должны въезжать.
И последнее. В населённом пункте мы с вами обязаны уступать дорогу маршрутным транспортным средствам, начинающим движение от обозначенного места остановки.
Водитель маршрутного транспортного средства при этом имеет преимущество, но воспользоваться им имеет право, только убедившись в том, что ему его предоставляют.
Отсюда следует простой вывод: если произойдёт ДТП, то это будет так называемая «обоюдка». То есть вина поровну разделится между нами и водителем маршрутного транспортного средства. Мы будем виноваты, так как не уступили ему, а должны были это сделать, а водитель маршрутного транспортного средства будет виноват так как начал движение, не убедившись в том, что ему уступают.
При этом если маршрутное транспортное средство отъезжает от места, где нет обозначенной остановки, или вне населённого пункта, то уступать ему мы не обязаны.
ПДД РФ раздел 18. Приоритет маршрутных транспортных средств
18. 1. Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
1. Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
18.2. На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11, 5.13.1, 5.13.2, 5.14, запрещаются движение и остановка других транспортных средств (за исключением транспортных средств, используемых в качестве легкового такси) на этой полосе. (В редакции постановлений Правительства Российской Федерации от 14.12.2005 г. N 767; от 28.03.2012 г. N 254)
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, что это не создает помех маршрутным транспортным средствам.
18.3. В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенного места остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу. (В редакции Постановления Правительства Российской Федерации от 25.09.2003 г. N 595)
Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу. (В редакции Постановления Правительства Российской Федерации от 25.09.2003 г. N 595)
Другие разделы ПДД России
Добавить комментарий к разделу 18 ПДД РФ
Приоритет маршрутных транспортных средств
Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
+ 2 тематических билета
На дорогах с полосой для маршрутных транспортных средств, обозначенных знаком 5.11.1 , знаком 5.13.1 , знаком 5.13.2 и знаком 5.14 , запрещаются движение и остановка других транспортных средств на этой полосе, за исключением:
- Школьных автобусов;
- Транспортных средств, используемых в качестве легкового такси;
- Транспортных средств, которые используются для перевозки пассажиров, имеют, за исключением места водителя, более 8 мест для сидения, технически допустимая максимальная масса которых превышает 5 тонн, перечень которых утверждается органами исполнительной власти субъектов Российской Федерации — гг. Москвы, Санкт-Петербурга и Севастополя;
На полосах для маршрутных транспортных средств разрешено движение велосипедистов в случае, если такая полоса располагается справа.
Водители транспортных средств, допущенных к движению по полосам для маршрутных транспортных средств, при въезде на перекресток с такой полосы могут отступать от требований дорожных знаков 4. 1.1 , 4.1.2 , 4.1.3 , 4.1.4 , 4.1.5 , 4.1.6 , 5.15.1 и 5.15.2 для продолжения движения по такой полосе.
1.1 , 4.1.2 , 4.1.3 , 4.1.4 , 4.1.5 , 4.1.6 , 5.15.1 и 5.15.2 для продолжения движения по такой полосе.
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, что это не создает помех маршрутным транспортным средствам.
+ 7 тематических билетов
В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенного места остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
+ 3 тематических билета
18. ПРИОРИТЕТ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ. Правила дорожного движения с комментариями и иллюстрациями
18. ПРИОРИТЕТ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ
18.1
Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.
Читатели А и Б: Из 13 раздела Правил мы помним, что на перекрестке трамваи при одновременном праве на движение с безрельсовым транспортом имеют преимущество. По-видимому, то же самое и вне перекрестка (рис. 203).
Автор: Совершенно верно, за исключением случая выезда из депо, когда уступить дорогу придется водителю трамвая (рис. 204).
Читатель А: И это весьма логично, поскольку выезд из депо – это выезд с прилегающей территории. А при выезде с прилегающей территории на дорогу всегда нужно уступать остальным участникам движения (п. 8.3 Правил).
18.2
На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11, 5.13.1, 5.13.2, 5.14, запрещаются движение и остановка других транспортных средств на этой полосе (рис. 205).
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, если это не создает помех маршрутным транспортным средствам.
Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, если это не создает помех маршрутным транспортным средствам.
Читатель А: На этих полосах может быть нанесена разметка в виде буквы «А».
18.3
В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенной остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
Читатель А: В этом пункте не упомянуты маршрутные такси.
Автор: Правильное замечание. Ныне действующие Правила дорожного движения маршрутные такси к маршрутным транспортным средствам не относят (см. п. 1.2 Правил, термин «Маршрутное транспортное средство») и такие льготы на них не распространяют.
Читатель Б: Льготы для водителей автобусов и троллейбусов при начале движения, видимо, связаны с интенсивным движением транспорта в населенных пунктах. Если им не уступить, они выбьются из графика. А вот как понимать второе предложение п. 18.3?
Автор: То, что автобусы и троллейбусы имеют значительную длину вам известно.
Их водители перед началом движения от посадочной площадки включают левый указатель поворота. В населенных пунктах, как вы правильно заметили, при интенсивном движении транспорта, водители автомашин, в данный момент проезжающие рядом с автобусом или троллейбусом, уже уступить дорогу не смогут. Они продолжают движение. А водители тех машин, которые еще не поравнялись с автобусом или троллейбусом – должны уступать.
В населенных пунктах, как вы правильно заметили, при интенсивном движении транспорта, водители автомашин, в данный момент проезжающие рядом с автобусом или троллейбусом, уже уступить дорогу не смогут. Они продолжают движение. А водители тех машин, которые еще не поравнялись с автобусом или троллейбусом – должны уступать.
Приоритет маршрутных транспортных средств (ПДД 2021) ? znaypravila.ru
- Актуально на 21.12.2021
- Редакция от 24.11.2018
- Утверждены 23.10.1993
18.1. Вне перекрестков, где трамвайные пути пересекают проезжую часть, трамвай имеет преимущество перед безрельсовыми транспортными средствами, кроме случаев выезда из депо.

18.2. На дорогах с полосой для маршрутных транспортных средств, обозначенных знаками 5.11.1, 5.13.1, 5.13.2, 5.14, запрещаются движение и остановка других транспортных средств (за исключением школьных автобусов и транспортных средств, используемых в качестве легкового такси, а также велосипедистов, а также транспортных средств, которыми в период с 1 июня по 17 июля 2018 г. перевозятся определенные Министерством транспорта Российской Федерации по согласованию с Министерством внутренних дел Российской Федерации и автономной некоммерческой организацией «Организационный комитет «Россия-2018» клиентские группы (официальные делегации FIFA, участники спортивных соревнований, персонал FIFA и автономной некоммерческой организации «Организационный комитет «Россия-2018», представители средств массовой информации, иные лица, принимающие участие в мероприятиях чемпионата мира по футболу FIFA 2018 года в Российской Федерации) при наличии аккредитационного свидетельства, выдаваемого автономной некоммерческой организацией «Организационный комитет «Россия-2018», — в случае, если полоса для маршрутных транспортных средств располагается справа) на этой полосе.
Если эта полоса отделена от остальной проезжей части прерывистой линией разметки, то при поворотах транспортные средства должны перестраиваться на нее. Разрешается также в таких местах заезжать на эту полосу при въезде на дорогу и для посадки и высадки пассажиров у правого края проезжей части при условии, что это не создает помех маршрутным транспортным средствам.
18.3. В населенных пунктах водители должны уступать дорогу троллейбусам и автобусам, начинающим движение от обозначенного места остановки. Водители троллейбусов и автобусов могут начинать движение только после того, как убедятся, что им уступают дорогу.
Многоцелевая задача маршрутизации и планирования транспортных средств с неопределенностью в запросах и приоритетах клиентов.
Achutan N, Caccettal L, Hill S (2003) Улучшенный алгоритм ветвей и отсеканий для задачи маршрутизации с ограниченными возможностями. Transp Sci 37: 153–169
Статья Google Scholar
Andreatta G, Lulli G (2008) Многопериодный TSP со стохастическими регулярными и срочными запросами. Eur J Oper Res 185: 122–132
Eur J Oper Res 185: 122–132
Статья МАТЕМАТИКА MathSciNet Google Scholar
Bent RW, Van Hentenryck P (2004) Планирование на основе сценариев для частично динамической маршрутизации транспортных средств со стохастическими потребителями.Oper Res 52: 977–987
Статья МАТЕМАТИКА Google Scholar
Blaseiro SR, Loiseau I, Ramonet J (2011) Алгоритм муравьиной колонии, гибридизированный с эвристикой вставки, для задачи маршрутизации, зависящей от времени, с временными окнами. Comput Oper Res 38: 954–966
Статья MathSciNet Google Scholar
Braysy O, Dullaert W, Gendreau M (2005) Эволюционный алгоритм для задачи маршрутизации транспортных средств с временными окнами.J Heuristics 10: 587–611
Статья Google Scholar
Chen ZL, Xu H (2006) Генерация динамических столбцов для динамической маршрутизации транспортных средств с временными окнами. Transp Sci 40: 74–88
Transp Sci 40: 74–88
Статья Google Scholar
Czech ZJ, Czarnas P (2002) Параллельный имитационный отжиг для задачи движения транспортных средств с временными окнами. 10-й семинар Euromicro по параллельной, распределенной и сетевой обработке, Испания, стр. 376–383
Desrochers M, Desrosiers J, Solomon M (1992) Новый алгоритм оптимизации для задачи маршрутизации транспортных средств с временными окнами.Oper Res 40: 342–354
Статья МАТЕМАТИКА MathSciNet Google Scholar
Дондо Р., Серда Дж. (2007) Кластерный подход к оптимизации для задачи маршрутизации транспортных средств гетерогенного парка с несколькими депо с временными окнами. Eur J Oper Res 176: 1478–1507
Статья МАТЕМАТИКА Google Scholar
Dondo R, Cerda J (2009) Гибридный алгоритм локального улучшения для крупномасштабных задач маршрутизации транспортных средств с несколькими депо с временными окнами. Comput Chem Eng 33: 513–530
Comput Chem Eng 33: 513–530
Статья Google Scholar
Эксиоглу Б., Вурал А.В., Райсман А. (2009) Проблема маршрутизации транспортных средств: таксономический обзор. Comput Ind Eng 57: 1472–1483
Статья Google Scholar
Erbao C, Mingyong L (2010) Проблема открытой маршрутизации транспортных средств с нечеткими требованиями. Exp Syst Appl 37: 2405–2411
Артикул Google Scholar
Gambardella LM, Taillard E, Agazzi G (1999) MACS-VRPTW: система множественных колоний муравьев для проблем с маршрутизацией транспортных средств с временными окнами.В: Корн Д., Дориго М., Гловер Ф. (ред.) Новые идеи в оптимизации. McGraw-Hill, London, pp. 63–76
Garcia-Najera A, Bullinaria JA (2011) Улучшенный многоцелевой эволюционный алгоритм для задачи маршрутизации транспортных средств с временными окнами. Comput Oper Res 38: 287–300
Comput Oper Res 38: 287–300
Статья МАТЕМАТИКА MathSciNet Google Scholar
Gendreau M, Guertin F, Potvin JV, Taillard E (1999) Параллельный табу-поиск для маршрутизации и диспетчеризации транспортных средств в реальном времени.Transp Sci 33: 381–390
Статья МАТЕМАТИКА Google Scholar
Ghoseiri K, Ghannadpour SF (2010a) Задача многоцелевого маршрута транспортного средства с временными окнами с использованием целевого программирования и генетического алгоритма. Appl Soft Comput 4: 1096–1107
Статья Google Scholar
Ghoseiri K, Ghannadpour SF (2010b) Гибридный генетический алгоритм для назначения однородных локомотивов с несколькими депо с временными окнами.Appl Soft Comput 10: 53–65
Статья Google Scholar
Годфри Г. , Пауэлл В.Б. (2002) Алгоритм адаптивного динамического программирования для динамического управления автопарком, I: время пробега за один период. Transp Sci 36: 21–39
, Пауэлл В.Б. (2002) Алгоритм адаптивного динамического программирования для динамического управления автопарком, I: время пробега за один период. Transp Sci 36: 21–39
Статья МАТЕМАТИКА Google Scholar
Голден Б.Л., Васил Э.А., Келли Дж. П., Чао И.-М (1998) Влияние метаэвристики на решение проблемы маршрутизации транспортных средств: алгоритмы, наборы задач и результаты вычислений.В: Crainic TG, Laporte G (eds) Управление флотом и логистика. Kluwer, Boston, pp 33–56
Глава Google Scholar
Gulczynski D, Golden B, Wasil E (2010) Задача маршрутизации разделенных транспортных средств с минимальными суммами доставки. Transp Res E 46: 612–626
Статья Google Scholar
Haghani A, Jung S (2005) Задача динамической маршрутизации транспортных средств с зависящим от времени временем в пути.Comput Oper Res 32: 2959–2986
Статья МАТЕМАТИКА Google Scholar
Jemai J, Mellouli KH (2008) Эвристика поиска с использованием нейронных табу для задач маршрутизации в реальном времени. J Math Model Algorithms 7: 161–176
J Math Model Algorithms 7: 161–176
Статья МАТЕМАТИКА MathSciNet Google Scholar
Хуан А., Фаулин Дж., Гарсман С., Риера Д., Марулл Дж., Мендес С. (2011) Использование страховых запасов и моделирования для решения задачи маршрутизации транспортных средств со стохастическими требованиями.Transp Res C 19: 751–765
Статья Google Scholar
Килби П., Проссер П., Шоу П. (1998) Динамические VRP: исследование сценариев. Технический отчет APES-0-1998, Университет Стратклайда
Коль Н. (1995) Точные методы для ограниченной по времени маршрутизации и связанных задач планирования. Кандидат наук. Диссертация, Департамент математического моделирования, Технический университет Дании
Ларсен Дж. (1999) Распараллеливание задачи маршрутизации транспортных средств с временными окнами.Кандидат наук. диссертация, IMM-PHS-1999-62, Департамент математического моделирования, Технический университет Дании, Лингхи, Дания
Ларсен А.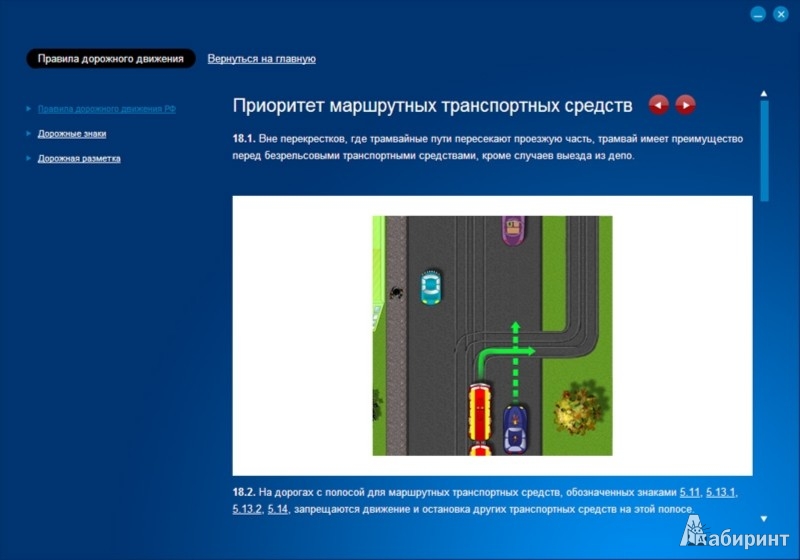 , Мадсен OBG, Соломон М.М. (2004) Априорная динамическая задача коммивояжера с временными окнами. Transp Sci 38: 459–572
, Мадсен OBG, Соломон М.М. (2004) Априорная динамическая задача коммивояжера с временными окнами. Transp Sci 38: 459–572
Статья Google Scholar
Lei H, Laporte G, Guo B (2011) Проблема маршрутизации емкостных транспортных средств со стохастическими требованиями и временными окнами. Comput Oper Res 38: 1775–1783
Статья МАТЕМАТИКА MathSciNet Google Scholar
Li F, Golden B, Wasil E (2005) Маршрутизация очень крупномасштабных транспортных средств: новые алгоритмы тестовых задач и результаты.Comput Oper Res 32: 1165–1179
Статья МАТЕМАТИКА Google Scholar
Lin CKY (2011) Проблема маршрутизации транспортных средств с окнами времени получения и доставки, а также координация транспортных ресурсов. Comput Oper Res 38: 1596–1609
Статья МАТЕМАТИКА MathSciNet Google Scholar
Lorini S, Potvin JY, Zufferey N (2011) Маршрутизация и планирование транспортных средств онлайн с динамическим временем в пути. Comput Oper Res 38: 1086–1090
Comput Oper Res 38: 1086–1090
Статья МАТЕМАТИКА Google Scholar
Монтеманни Р., Гамбарделла Л. М., Риццоли А. Э., Донати А. В. (2005) Система муравьиных колоний для динамической задачи маршрутизации транспортных средств. J Comb Opt 10: 327–343. DOI: 10.1007 / s10878-005-4922-6
Артикул МАТЕМАТИКА MathSciNet Google Scholar
Negata Y, Braysy O, Dullaret W (2010) Меметический алгоритм сборки краев на основе штрафов для задачи маршрутизации транспортных средств с временными окнами.Comput Oper Res 37: 724–737
Статья Google Scholar
Омбуки Б., Росс Б., Ханшар Ф. (2006) Многоцелевой генетический алгоритм для задачи маршрутизации транспортных средств с временными окнами. Appl Intell 24: 17–30
Статья Google Scholar
Pepin AS, Desaulniers G, Herts A, Huisman D (2009) Сравнение пяти эвристик для задачи планирования нескольких транспортных средств. J Sched 12: 17–30
J Sched 12: 17–30
Статья МАТЕМАТИКА MathSciNet Google Scholar
Pisinger D, Ropke S (2007) Общая эвристика для задач маршрутизации транспортных средств. Comput Oper Res 34: 2403–2435
Статья МАТЕМАТИКА MathSciNet Google Scholar
Potvin JY, Xu Y, Benyahia I (2006) Маршрутизация и планирование транспортных средств с динамическим временем в пути. Comput Oper Res 33: 1129–1137
Статья МАТЕМАТИКА Google Scholar
Salhi S, Petch RG (2007) Эвристика на основе GA для задачи выбора маршрута транспортного средства с несколькими поездками.J Math Model Algorithms 6: 591–613
Статья МАТЕМАТИКА MathSciNet Google Scholar
Шэн Х. Х., Ван Дж. К., Ханг Х. Х., Йен, округ Колумбия (2006) Нечеткая мера по проблеме маршрутизации транспортных средств для материалов больниц. Exp Syst Appl 30: 367–377
Exp Syst Appl 30: 367–377
Артикул Google Scholar
Соломон М.М. (1987) Алгоритмы для задач маршрутизации и планирования транспортных средств с ограничениями временного окна.Oper Res 35: 254–265
Статья МАТЕМАТИКА MathSciNet Google Scholar
Тан К.С., Ли Л.Х., Чжу К.К., Цюй К. (2001) Эвристические методы для решения проблем маршрутизации транспортных средств с временными окнами. Artif Intell Eng 15: 281–295
Статья Google Scholar
Tan KC, Chew YH, Lee LH (2006) Гибридный многокритериальный эволюционный алгоритм для решения задачи маршрутизации транспортных средств с временными окнами.Comput Optim Appl 34: 115–151
Статья МАТЕМАТИКА MathSciNet Google Scholar
Tan KC, Cheong CY, Goh CK (2007) Решение многокритериальной задачи маршрутизации транспортных средств со стохастическим спросом посредством эволюционных вычислений. Eur J Oper Res 177: 813–839
Eur J Oper Res 177: 813–839
Статья МАТЕМАТИКА Google Scholar
Tanga J, Pan ZH, Fung RYK, Lau H (2009) проблема маршрутизации транспортных средств с нечеткими временными окнами.Нечеткие множества Syst 160: 683–695
Статья Google Scholar
Танигучи Э., Шимамото Х. (2004) Интеллектуальная транспортная система на основе динамической маршрутизации и планирования транспортных средств с переменным временем в пути. Transp Res C 12: 235–250
Статья Google Scholar
Tavakkoli-Moghaddam R, Saremi AR, Ziaee MS (2006) Меметический алгоритм для задачи маршрутизации транспортных средств с обратными рейсами.Appl Math Comput 181: 1049–1060
Статья МАТЕМАТИКА MathSciNet Google Scholar
Tavakkoli-Moghaddam R, Safaei N, Kah MMO, Rabbani M (2007) Новая задача маршрутизации транспортных средств с распределенным сервисом для минимизации стоимости автопарка за счет имитации отжига. J Frankl Inst 344: 406–425
J Frankl Inst 344: 406–425
Статья МАТЕМАТИКА MathSciNet Google Scholar
Wassan AN, Wassan AH, Nagy G (2008) Реактивный алгоритм табу-поиска для задачи маршрутизации транспортных средств с одновременным вывозом и доставкой.J Comb Opt 15: 368–386. DOI: 10.1007 / s10878-007-9090-4
Артикул МАТЕМАТИКА MathSciNet Google Scholar
Yu S, Ding CH, Zhu K (2011) Гибридный алгоритм GA-TS для оптимизации маршрутов открытых транспортных средств для материалов угольных шахт. Exp Syst Appl 38: 10568–10573
Артикул Google Scholar
Метод защиты маршрутов приоритетного использования для транспортных средств экстренной помощи с использованием межмашинной связи и связи между транспортными средствами и дорогами
ПОКАЗАНО 1-9 ИЗ 9 ССЫЛКИ
Система аварийного оповещения на базе VANET
В этой работе описывается комплексный дизайн такая система аварийного оповещения транспортных средств, которая в полной мере использует межавтомобильную связь, но также включает придорожную инфраструктуру, такую как светофоры. Развернуть
Развернуть- Просмотреть 1 отрывок, ссылки на методы
Виртуальные полицейские агенты для маршрутизации трафика ITS
В этом документе представлена новая и доступная архитектура, направленная на улучшение управления дорожным движением на основе интеллектуальных виртуальных полицейских агентов (VPA), основанных на фигурах реальных полицейских агентов которые ориентированы на эффективное управление проблемами дорожного движения. Развернуть- Просмотреть 1 отрывок, справочная информация
ABSRP — Подход к обнаружению услуг для автомобильных одноранговых сетей
Предлагается новый протокол под названием Address Based Service Resolution Protocol (ABSRP) для обнаружения услуг в автомобильных одноранговых сетях для обеспечения комфорта и безопасность для пассажиров и не зависит от протокола маршрутизации сетевого уровня.Развернуть- Просмотреть 1 отрывок, ссылки на методы
Комплексное исследование автомобильной специальной сети
Автомобильные специальные сети (VANET) классифицируются как приложение мобильной специальной сети (MANET), которое может повысить безопасность дорожного движения и в обеспечении комфорта путешественников.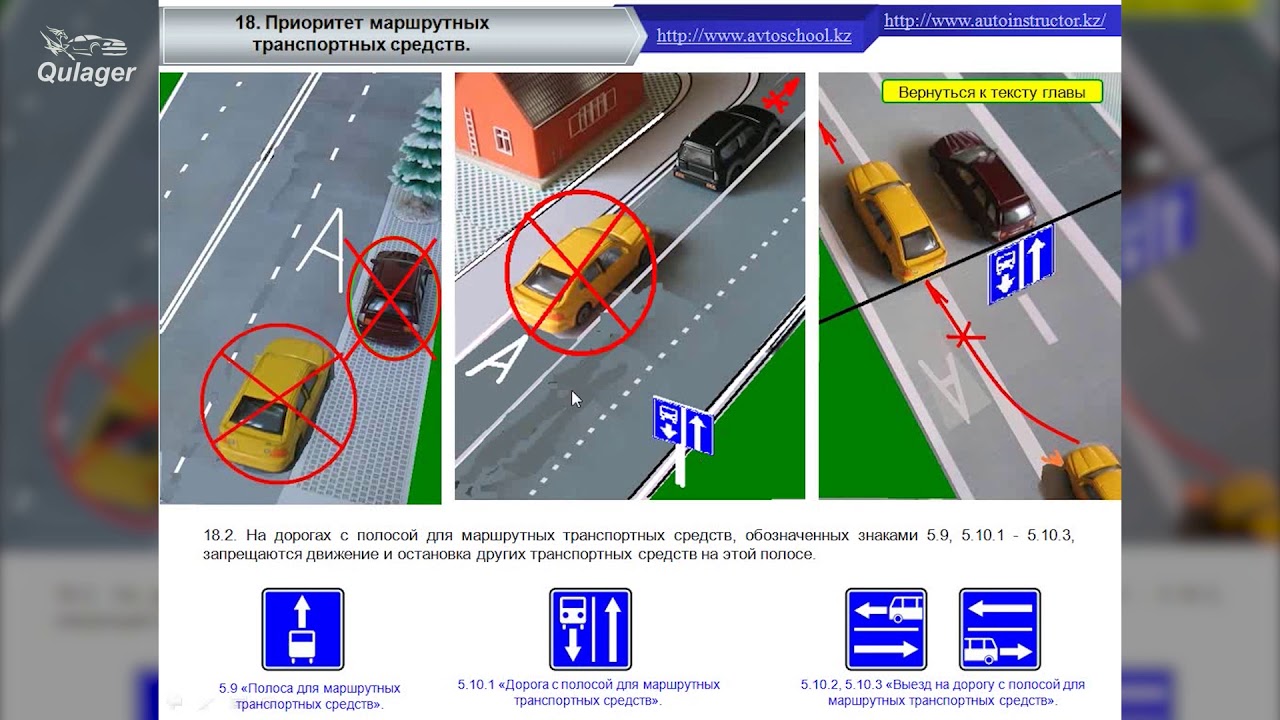 Недавно… Развернуть
Недавно… Развернуть
- Просмотреть 1 отрывок, справочная информация
Политика связи и ИТС в Японии
В Японии ITS-Safety 2010 продвигает ИТС, разрабатывая меры для исследований и разработок, стандартизации, распространения и продвижения информации ИТС. коммуникационные технологии.Развернуть- Посмотреть 1 отрывок, справочная информация
Проектирование пространства-времени
Захватывающая возможность, открытая общей теорией относительности, — это возможность деформировать пространство путем создания червоточин, соединяющих удаленные точки, или мостов, соединяющих отдельные вселенные. Если точки в… Разверните
Спасение кого угодно и всего, что можно спасти
Глава 2, Спасательные операции, Первая помощь, http://www.fdma.go.jp/en/pdf/top/en_03. pdf (доступ 9 марта 2015 г.).
- 2015
Спасение всех и всего, что можно спасти Спасательные операции, Первая помощь
и Хуссиен Зедан, «Комплексное исследование автомобильной сети Ad Hoc
Bus Rapid Transit — 14th Street Select Bus Service with Transit И пилотный проект «Приоритет грузовиков»
Как пользоваться 14-й улицей »вики полезно Фон | Работа с сообществом и отчеты | Вопросы-Ответы Расписание автобусовMTA
14-я улица Манхэттена является важным соединением между Нижним Ист-Сайдом, Юнион-сквер и районом Митпэкинг. Автобусная остановка 14th Street Busway спроектирована таким образом, чтобы уделять первоочередное внимание безопасному и надежному перемещению большинства людей и товаров, при этом обеспечивая локальный доступ для всех пользователей проезжей части.
Автобусная остановка 14th Street Busway спроектирована таким образом, чтобы уделять первоочередное внимание безопасному и надежному перемещению большинства людей и товаров, при этом обеспечивая локальный доступ для всех пользователей проезжей части.
Ежедневно с 6:00 до 22:00 по 14-й улице Манхэттена между 3-й авеню и 9-й авеню могут передвигаться только автобусы, грузовики и автомобили скорой помощи. Все другие транспортные средства могут совершать местные поездки для доступа к предприятиям, жилым домам и гаражам на 14-й улице, но водители должны сделать следующий доступный поворот направо.
С 22:00 до 6:00 все автомобили могут проезжать по 14-й улице.
Как пользоваться 14-й улицей
с 6:00 до 22:00
- Только автобусы и грузовики могут курсировать между 9-й авеню и 3-й авеню.
- Все остальные автомобили могут совершать местные поездки, чтобы добраться до тротуара и гаражей, но должны повернуть на следующей доступной правой стороне.
- Коммерческие автомобили могут производить погрузку и разгрузку в зонах краткосрочной дозированной загрузки.
- Легковые автомобили имеют право высадки и посадки по всему коридору.

с 10 вечера до 6 утра
- Все автомобили могут проезжать по коридору.
- Нет Парковка Правила разрешают оперативную погрузку и разгрузку по коридору.
Все времена
- Всем транспортным средствам запрещен поворот налево с 14-й улицы (кроме автобусов MTA в обозначенных местах).
14th Street (pdf)
Фон
После успешного пилотного проекта популярный Автобусный путь на 14-й улице был сделан постоянным в июне 2020 года с планом расширения автобусных полос на восток.
Пилотный проект «14th Street Busway», ранее известный как «14th Street Transit and Truck Priority Pilot Project», получил международное внимание, поскольку он успешно увеличил скорость движения автобусов на 24% и пассажиропоток на 30%.
NYC DOT начало пилотную разработку проекта Transit and Truck Priority на 14-й улице 3 октября 2019 года. Пилотный проект был нацелен на запуск в координации с M14A / D Select Bus Service, который начался 1 июля 2019 года.
Проект, который ежедневно обслуживает около 28 000 пассажиров M14, сочетает в себе блоки с эксклюзивным доступом и стандартные полосы для автобусов, чтобы обеспечить приоритет движения автобусов от 9-й авеню до 1-й авеню.
Улучшенный перезапуск автобусов: мэр де Блазио объявляет о крупных проектах по ускорению автобусов во время поэтапного открытия города (4 июня 2020 г.) Мэр де Блазио публикует первый отчет об автобусном движении на 14-й улице (18 декабря 2019 г.) NYC DOT и MTA NYC Transit продолжают успешное развертывание транзитного приоритета на 14-й улице с новыми платформами для посадки на автобусы и расширением тротуаров (6 ноября 2019 г.) Мэр де Блазио объявляет, что автобусная остановка на 14-й улице вступает в силу сегодня (3 октября 2019 г.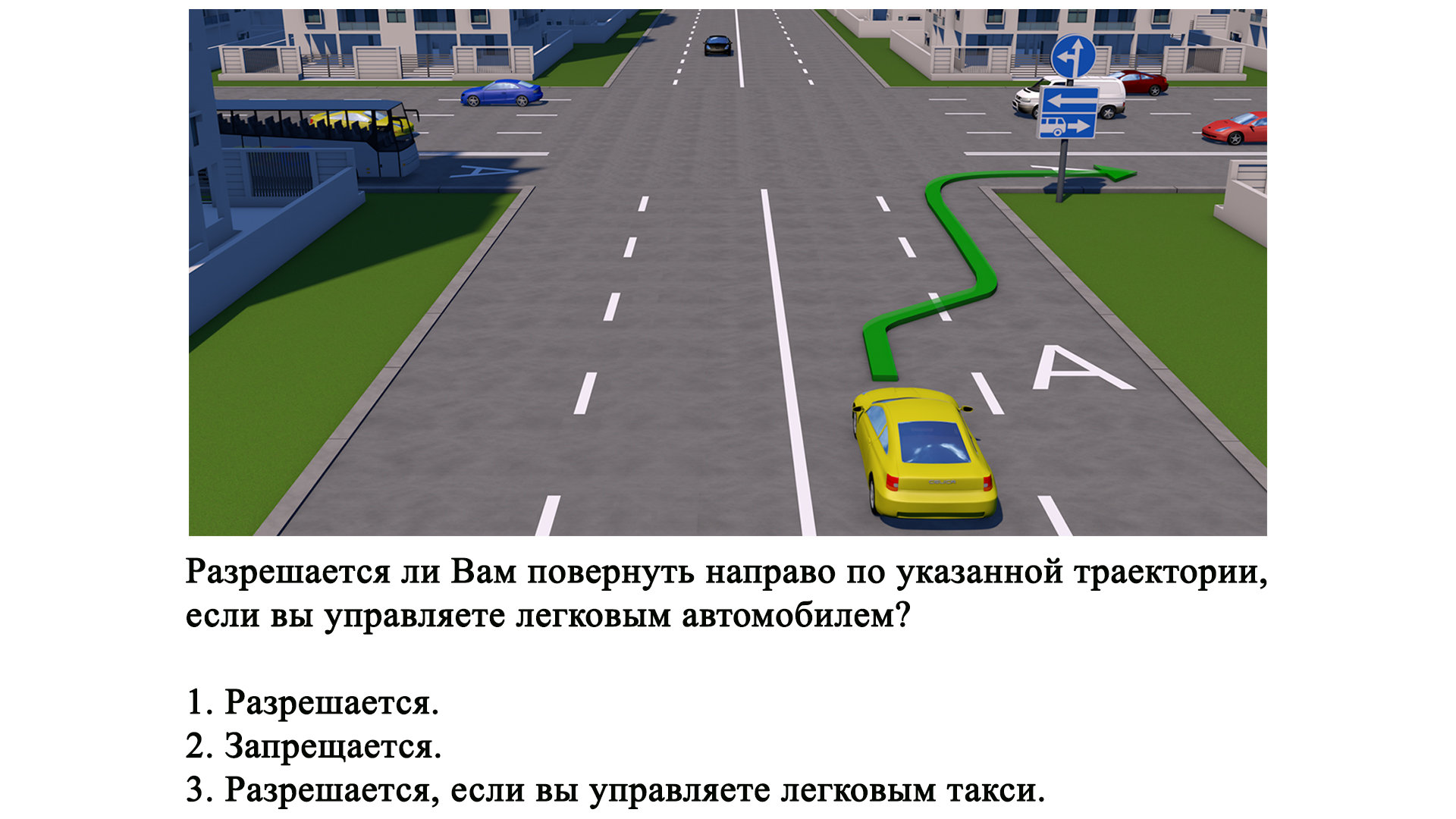 ) Заявления мэра де Блазио и комиссара Троттенберга на автобусной остановке на 14-й улице (27 сентября 2019 г.) Мэр де Блазио объявляет о проекте по переезду жителей Нью-Йорка на 14-ю улицу (24 апреля 2019 г.)
) Заявления мэра де Блазио и комиссара Троттенберга на автобусной остановке на 14-й улице (27 сентября 2019 г.) Мэр де Блазио объявляет о проекте по переезду жителей Нью-Йорка на 14-ю улицу (24 апреля 2019 г.)Работа с населением и отчеты
Отчет о мониторинге и онлайн-опрос
Отчет о независимом мониторинге и онлайн-опрос пилотного проекта 14th Street Transit & Truck Priority Pilot Project от Sam Schwartz EngineeringЗаинтересованные стороны
Общественные группы и местные заинтересованные стороны внесли ценный вклад в пилотный проект по приоритетным транспортным перевозкам и грузовым автомобилям на 14-й улице и процесс планирования SBS M14A / D.NYC DOT и MTA сделали презентации для этих групп, чтобы поделиться информацией о SBS, и получили обратную связь на протяжении всего процесса планирования.Брошюра
Брошюра об автобусах 14th Street (pdf, обновлено в октябре 2019 г.)Часто задаваемые вопросы
Где меня могут высадить или забрать?- Посадка и высадка разрешены по всему коридору; водители несут ответственность за соблюдение правил дорожного движения. Для некоторых может быть быстрее организовать встречу или высадку на ближайшем соседнем проспекте.
 Для некоторых может быть быстрее организовать встречу или высадку на ближайшем соседнем проспекте.
Для некоторых может быть быстрее организовать встречу или высадку на ближайшем соседнем проспекте.- Запрет на левый поворот предотвращает застревание автобусов за поворачивающими машинами и повышает безопасность пешеходов; левые повороты связаны с высоким уровнем травматизма пешеходов.
- 14-я улица — обозначенный маршрут для грузовиков. Разрешение на использование грузовиков помогает ограничить движение грузовиков на боковых улицах.
- Любое транспортное средство, имеющее более двух осей ИЛИ шести или более колес, считается грузовиком.
- Зоны краткосрочной погрузки предусмотрены по коридору ежедневно с 6.00 до 22.00; метры действуют с понедельника по субботу.

- Ограничения вводятся с помощью автоматических камер на 14-й улице. Дорожные агенты NYPD также могут выдавать повестки.
- Автоматические камеры вдоль 14-й улицы отслеживают правильное использование автобусного проезда, и агенты полиции Нью-Йорка также могут выдавать повестки.
- Правила обочины соблюдаются дорожными агентами NYPD; Автоматические камеры могут использоваться только для контроля движения по полосе движения автобуса.
Если у вас есть проблема, связанная с транспортом, комментарий или вопрос по поводу автобуса 14th Street , свяжитесь с комиссаром онлайн или отправьте письмо.
Приоритетная связь между транспортными средствами для обмена сообщениями о безопасности на дорогах с использованием IEEE 802.11e
Мы предлагаем использовать IEEE 802.11e в сочетании с механизмами ретрансляции для межтранспортной связи на основе приоритетов (IVC) для обмена сообщениями о безопасности на дорогах как в транспортной инфраструктуре, так и в рекламе. сети hoc.Каждое сообщение IVC, которому назначается приоритет в зависимости от срочности события безопасности, требует различного качества обслуживания с точки зрения надежности связи и средней задержки. Чтобы повысить надежность связи в IVC на основе широковещательной передачи, мы применяем механизмы повторной передачи, которые могут обеспечить пропорциональную дифференциацию надежности для каждого сообщения с приоритетом. Мы оцениваем производительность предлагаемого нами протокола с помощью OPNET Modeler с точки зрения процента успешных передач и средней задержки. Производительность протокола оценивается для (1) различных системных параметров, таких как размер пакета, количество транспортных средств и процент транспортных средств с приоритетом 1, и (2) параметров протокола на основе приоритета, таких как окно конкуренции, межкадровый интервал и параметры повторной передачи. Результаты показывают, что правильные настройки параметров протокола для каждого приоритетного сообщения приводят к эффективному решению для широковещательной IVC на основе приоритета. Более того, предлагаемый протокол полностью совместим как с IEEE 802.11, так и с IEEE 802.Стандарты 11e.
Производительность протокола оценивается для (1) различных системных параметров, таких как размер пакета, количество транспортных средств и процент транспортных средств с приоритетом 1, и (2) параметров протокола на основе приоритета, таких как окно конкуренции, межкадровый интервал и параметры повторной передачи. Результаты показывают, что правильные настройки параметров протокола для каждого приоритетного сообщения приводят к эффективному решению для широковещательной IVC на основе приоритета. Более того, предлагаемый протокол полностью совместим как с IEEE 802.11, так и с IEEE 802.Стандарты 11e.
1. Введение
В связи с ростом количества транспортных средств за последние пять десятилетий, у нас сейчас насыщенная транспортная инфраструктура. Таким образом, заторы на дорогах, аварии и задержки транспорта становятся неизбежными [1–3]. Например, только в Европейском Союзе ежегодно регистрируется более 3,5 миллионов раненых и более 160 миллиардов евро материальных убытков [4]. Для решения этих проблем осуществляется ряд мер, таких как внедрение систем безопасности (например,g., ремни безопасности и подушки безопасности) и строительство более качественных дорог и автомагистралей. Однако очевидно, что строительство большего количества дорог — это решение, ограниченное необходимыми крупными денежными вложениями, а также нехваткой доступной площади, что особенно заметно в городских районах.
Для решения этих проблем осуществляется ряд мер, таких как внедрение систем безопасности (например,g., ремни безопасности и подушки безопасности) и строительство более качественных дорог и автомагистралей. Однако очевидно, что строительство большего количества дорог — это решение, ограниченное необходимыми крупными денежными вложениями, а также нехваткой доступной площади, что особенно заметно в городских районах.
Из-за этих проблем исследование интеллектуальных транспортных систем направлено на решение проблем безопасности на дорогах, то есть на разработку приложений безопасности, которые приводят к значительному сокращению критических дорожных происшествий.Примерами приложений безопасности являются уведомление об авариях, предупреждение о заторах и предотвращение заторов. Эти приложения используют различные данные, полученные от ведущего транспортного средства, дороги и окружающих транспортных средств. К таким данным относятся данные о торможении идущих впереди автомобилей, дорожные условия, определяемые окружающими автомобилями, и данные других датчиков в транспортном средстве. Прогнозируется, что внедрение приложений для обеспечения безопасности дорожного движения приведет к снижению среднего количества аварий как минимум на 20% [5, 6].Как подчеркивают многие исследователи в [7–10], связь между транспортными средствами с фиксированной инфраструктурой или без нее обеспечивает необходимую поддержку для развертывания таких приложений безопасности и реализации автоматизированной системы автомобильных дорог [11].
Прогнозируется, что внедрение приложений для обеспечения безопасности дорожного движения приведет к снижению среднего количества аварий как минимум на 20% [5, 6].Как подчеркивают многие исследователи в [7–10], связь между транспортными средствами с фиксированной инфраструктурой или без нее обеспечивает необходимую поддержку для развертывания таких приложений безопасности и реализации автоматизированной системы автомобильных дорог [11].
Поскольку важность IVC была также признана Федеральной комиссией по связи (FCC), ей был выделен блок спектра в диапазоне от 5,850 до 5,925 ГГц. Ряд национальных проектов, таких как рабочая группа DSRC (WAVE) [12], German FleetNet [13], проекты NOW [14], а также японский проект Internet-ITS [15], специально посвящены ряду национальных проектов.
Важность сообщений безопасности приводит к различным приоритетам сообщений, которые предъявляют свои собственные особые требования к системе связи с точки зрения надежности связи и средней задержки. Например, когда происходит авария, будут сгенерированы сообщения, связанные с аварией. Эти сообщения должны передаваться немедленно, с высокой надежностью и малой задержкой. Следовательно, эти сообщения должны иметь более высокий приоритет по сравнению с сообщениями, связанными с перегрузкой трафика, созданными в период перегрузки трафика.
Например, когда происходит авария, будут сгенерированы сообщения, связанные с аварией. Эти сообщения должны передаваться немедленно, с высокой надежностью и малой задержкой. Следовательно, эти сообщения должны иметь более высокий приоритет по сравнению с сообщениями, связанными с перегрузкой трафика, созданными в период перегрузки трафика.
Большинство статей, относящихся к разработке протокола управления доступом к среде (MAC) для IVC [16–22], не учитывают приоритет сообщений. Однако без учета таких приоритетов экстренные сообщения могут задерживаться, блокироваться и отбрасываться сообщениями с более низким приоритетом, которые не являются срочными и могут ожидать более поздней передачи. Есть несколько работ [23–25], в которых рассматривается приоритет сообщений. В [24] авторы предложили приоритетный CSMA (P-CSMA) и опросный P-CSMA (PP-CSMA). Однако протокол несовместим с IEEE 802.11 и IEEE 802.11e. Кроме того, хорошо известно, что механизм опроса не устойчив к ошибкам канала и динамическим топологиям сети.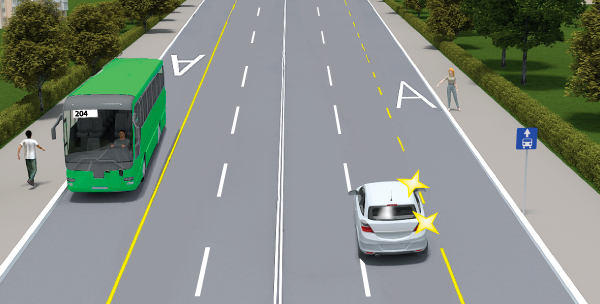
В [23] авторы используют усовершенствованный распределенный доступ к каналу (EDCA) IEEE 802.11e для обеспечения схемы приоритета для широковещательной передачи IVC в одноранговых сетях. Однако авторы не рассматривают вопросы надежности широковещательной передачи, то есть предполагают, что каждое широковещательное сообщение передается только один раз. Кроме того, в своем исследовании моделирования они рассматривают только одно транспортное средство, передающее сообщения с наивысшим приоритетом, что может исказить результаты работы.Другими словами, авторы не учитывали разногласия среди высокоприоритетных сообщений. Это неизбежное соперничество может привести к серьезным конфликтам, вызывая низкую надежность связи. Напротив, в этой статье мы подробно рассматриваем эту проблему, поскольку важно обеспечить высочайшую надежность для сообщений с наивысшим приоритетом. В частности, чтобы преодолеть проблему надежности, мы используем повторные передачи на основе приоритета, то есть количество повторных передач является функцией уровня приоритета сообщения. Кроме того, мы изучаем и сравниваем как инфраструктурные, так и специализированные сети для широкого спектра параметров системы и протоколов.
Кроме того, мы изучаем и сравниваем как инфраструктурные, так и специализированные сети для широкого спектра параметров системы и протоколов.
Мы представили схему приоритетов для иерархических военных специальных сетей в [25] и безопасных транспортных специальных сетей в [26], однако в статье мы сравниваем результат инфраструктуры с специализированными сетями, которые мы предложили до.
В этой статье мы используем протокол MAC IEEE 802.11e EDCA [27] на основе широковещательной передачи в сочетании с механизмами повторной передачи для различных сетевых настроек, то есть для транспортной инфраструктуры и специальных сетей.Предлагаемый подход обеспечивает пропорциональную дифференциацию услуг в обеих сетях с точки зрения надежности связи и средней задержки. Чтобы повысить надежность передачи в IVC на основе широковещательной передачи, мы используем различные механизмы повторной передачи. Параметры повторной передачи уникально устанавливаются для каждого приоритета и каждой настройки сети. Сообщения с более высоким приоритетом будут повторно передаваться большее количество раз, чем сообщения с более низким приоритетом, что приводит к более высокой надежности для сообщений с более высоким приоритетом.
Сообщения с более высоким приоритетом будут повторно передаваться большее количество раз, чем сообщения с более низким приоритетом, что приводит к более высокой надежности для сообщений с более высоким приоритетом.
Моделирование на основе нашего OPNET Modeler [28] показывает, что предложенный протокол является жизнеспособным решением для IVC на основе приоритетов, то есть протокол обеспечивает: (1) дифференциацию услуг для различных приоритетов сообщений, (2) очень низкие средние задержки ( значительно ниже, чем допустимые задержки в IVC) и (3) высокая надежность (высокий процент успешных передач) даже при большом количестве транспортных средств.
Остальная часть документа организована следующим образом: Раздел 2 кратко обсуждает IEEE 802.11e, а в разделе 3 представлены приоритеты сообщений безопасности IVC. Подробное описание предлагаемого протокола и связанных результатов моделирования как для инфраструктурных, так и для специальных транспортных сетей обсуждается в разделах 4 и 5, соответственно. В разделе 6 сравнивается предлагаемая производительность протокола для обеих сетей. Раздел 7 завершает статью.
В разделе 6 сравнивается предлагаемая производительность протокола для обеих сетей. Раздел 7 завершает статью.
2. IEEE 802.11e
Унаследованный MAC IEEE 802.11 не поддерживает концепцию дифференциации сообщений на основе разных приоритетов сообщений.Поскольку необходимость обеспечения дифференциации услуг между различными классами трафика очевидна (например, предоставление различного обслуживания для трафика, такого как голос, видео и электронная почта), в июле 1999 года была создана рабочая группа 802.11e для внедрения поддержки и обслуживания качества обслуживания (QoS). дифференциация для различных типов приложений, таких как фоновый трафик, трафик с максимальной эффективностью, видеотрафик и голосовой трафик. IEEE 802.11e, который был утвержден в качестве стандарта в июле 2005 г. [27], определяет два механизма: расширенный распределенный доступ к каналу (EDCA) и доступ к каналу, управляемый функцией гибридной координации (HCCA).EDCA рассматривает три основных механизма приоритета для доступа к каналу: конкурентное окно (CW), параметры отсрочки передачи (и) и время простоя, после которого может произойти передача (межкадровое пространство арбитража, AIFS). Как только станция получает доступ к каналу, EDCA также предоставляет возможность различать временной интервал, в течение которого станции разрешено удерживать канал (возможность передачи, TXOP).
Как только станция получает доступ к каналу, EDCA также предоставляет возможность различать временной интервал, в течение которого станции разрешено удерживать канал (возможность передачи, TXOP).
EDCA вводит понятие категорий доступа (AC), каждая со своей собственной очередью.Каждый пакет данных, который поступает с более высокого уровня и принадлежит определенному приложению, отображается в соответствующий AC. Сопоставление выполняется на основе приложения, то есть голосовой трафик, видеотрафик, фоновый трафик и трафик максимального усилия сопоставляются с категориями доступа 3, 2, 1 и 0 соответственно. Каждая категория доступа i использует параметры конкуренции ([ i ], [ i ], AIFS [ i ] и TXOP [ i ]). В основном, чем меньше значения [ i ], [ i ] и AIFS [ i ], тем короче задержка доступа к каналу для соответствующего AC и тем выше приоритет для получения носителя.AIFS рассчитывается следующим образом:
где SIFS — это короткое межкадровое пространство, а AIFSN [ i ] — целое число больше 1. После определения состояния бездействия среды в течение временного интервала AIFS [ i ] каждый AC вычисляет свое собственное случайное время отсрочки передачи ([ i ] ] время отсрочки [ i ]). Цель использования разных параметров конкуренции для разных очередей — дать AC с низким приоритетом более длительное время ожидания, чем AC с высоким приоритетом, поэтому AC с высоким приоритетом, вероятно, получит доступ к среде раньше, чем AC с низким приоритетом.Обратите внимание, что времена отсрочки передачи различных AC генерируются случайным образом и могут достигать нуля одновременно. Это может вызвать внутреннее столкновение. В таком случае виртуальный планировщик внутри каждого узла позволяет передавать первым только AC с наивысшим приоритетом.
После определения состояния бездействия среды в течение временного интервала AIFS [ i ] каждый AC вычисляет свое собственное случайное время отсрочки передачи ([ i ] ] время отсрочки [ i ]). Цель использования разных параметров конкуренции для разных очередей — дать AC с низким приоритетом более длительное время ожидания, чем AC с высоким приоритетом, поэтому AC с высоким приоритетом, вероятно, получит доступ к среде раньше, чем AC с низким приоритетом.Обратите внимание, что времена отсрочки передачи различных AC генерируются случайным образом и могут достигать нуля одновременно. Это может вызвать внутреннее столкновение. В таком случае виртуальный планировщик внутри каждого узла позволяет передавать первым только AC с наивысшим приоритетом.
3. Приоритеты сообщений IVC
В этом разделе мы описываем концепцию приоритетов сообщений IVC и внутренних очередей в каждом автомобиле.
Каждое сообщение, которое приходит на MAC с более высокого уровня, отображается в один приоритет. Примеры приоритетов сообщений при передаче сообщений о безопасности дорожного движения показаны в таблице 1, однако количество приоритетов может различаться в зависимости от требований каждой реализации.
Примеры приоритетов сообщений при передаче сообщений о безопасности дорожного движения показаны в таблице 1, однако количество приоритетов может различаться в зависимости от требований каждой реализации.
| ||||||||||||||||||||||||||
Мы предполагаем четыре внутренних очереди на автомобиль для четырех различных приоритетных сообщений вместо типов трафика, как в традиционном 802. 11e (см. Рисунок 1). Каждое сообщение будет помещено в очередь в соответствии с его приоритетом. Есть виртуальный обработчик столкновений, который обрабатывает внутренние столкновения. Виртуальный обработчик конфликтов позволит передавать сообщения с более высоким приоритетом перед сообщениями с более низким приоритетом. Мы проводим политику без предупреждения. Для каждого приоритета i существуют разные значения следующих параметров: [ i ], [ i ], AIFS [ i ] и TXOP [ i ]. Следовательно, сообщение с более высоким приоритетом получит доступ к каналу быстрее, чем сообщения с более низким приоритетом.Как только автомобиль получает канал, он передает только 1 служебный блок данных MAC (MSDU).
11e (см. Рисунок 1). Каждое сообщение будет помещено в очередь в соответствии с его приоритетом. Есть виртуальный обработчик столкновений, который обрабатывает внутренние столкновения. Виртуальный обработчик конфликтов позволит передавать сообщения с более высоким приоритетом перед сообщениями с более низким приоритетом. Мы проводим политику без предупреждения. Для каждого приоритета i существуют разные значения следующих параметров: [ i ], [ i ], AIFS [ i ] и TXOP [ i ]. Следовательно, сообщение с более высоким приоритетом получит доступ к каналу быстрее, чем сообщения с более низким приоритетом.Как только автомобиль получает канал, он передает только 1 служебный блок данных MAC (MSDU).
4. Сеть автомобильной инфраструктуры
В этом разделе мы обсуждаем уникальные характеристики сети автомобильной инфраструктуры, предлагаемый протокол и результаты, полученные в результате моделирования на основе OPNET Modeler.
4.
 1. Модель сети
1. Модель сети Мы предполагаем, что сеть транспортной инфраструктуры, в которой связь между транспортными средствами контролируется приборами на обочине дороги (RSU) [29–31], расположенными на обочине шоссе, как показано на рисунке 2.Каждый RSU действует как точка доступа, которая передает все сообщения, полученные от одного конкретного транспортного средства, всем другим в своем диапазоне связи. Таким образом, каждое транспортное средство, которое хочет отправлять сообщения, передает сообщения непосредственно в RSU, используя протокол EDCA. Как только RSU получает сообщение, он немедленно ретранслирует его (RSU не конкурирует с другими транспортными средствами за доступ к каналу, поскольку он имеет наивысший приоритет. RSU использует точечное межкадровое пространство (PIFS), которое короче всех значений AIFS [ i ] ]) для всех других транспортных средств в радиусе действия.Как мы кратко упоминали в предыдущем разделе, в связи с EDCA, разные значения пределов повторных попыток назначаются разным приоритетам (RL [ i ] назначается сообщениям с приоритетом i ).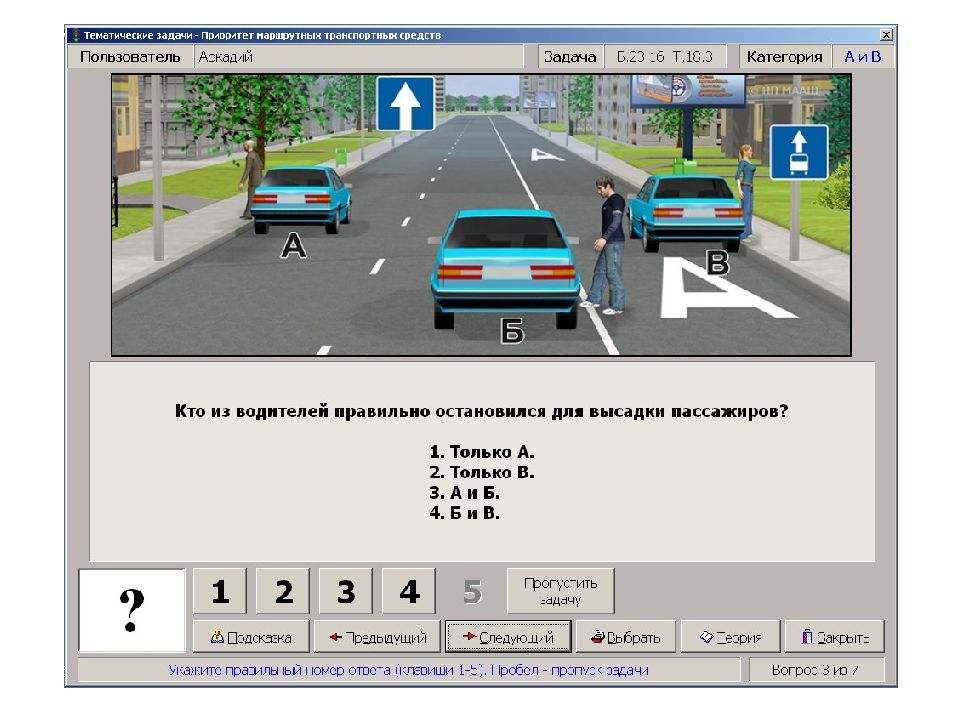 Однако фактическое количество повторных передач каждого сообщения может быть меньше предела повторных попыток, поскольку процесс повторной передачи будет завершен, как только передающее транспортное средство получит подтверждение обратно от RSU. Чтобы повысить надежность сообщения, наибольшее значение RL [ i ] должно быть назначено сообщениям с наивысшим приоритетом, таким образом обеспечивая больше возможностей повторной передачи для сообщений с наивысшим приоритетом, увеличивая их вероятность успешной передачи.
Однако фактическое количество повторных передач каждого сообщения может быть меньше предела повторных попыток, поскольку процесс повторной передачи будет завершен, как только передающее транспортное средство получит подтверждение обратно от RSU. Чтобы повысить надежность сообщения, наибольшее значение RL [ i ] должно быть назначено сообщениям с наивысшим приоритетом, таким образом обеспечивая больше возможностей повторной передачи для сообщений с наивысшим приоритетом, увеличивая их вероятность успешной передачи.
4.2. Результаты моделирования и анализ
Чтобы количественно оценить производительность предлагаемого нами протокола на основе приоритетов сообщений, мы провели исследование моделирования с помощью OPNET Modeler [28]. В этом разделе описаны сценарии моделирования, значения конфигурации и производительность с точки зрения процента успешных передач (надежность) и средней задержки (эта задержка включает в себя очереди и задержки передачи, вызванные сообщением в исходных транспортных средствах и в RSU) для каждого приоритета.![]() сообщение.
сообщение.
Мы изучаем производительность протокола как функцию (1) параметра протокола с точки зрения лимита повторных попыток для каждого приоритетного сообщения, RL [ i ], и (2) параметров системы с точки зрения количества транспортных средств, N, пакета размер, L, и процент транспортных средств с приоритетом 1, P1.
В нашем моделировании мы рассматриваем один RSU [31] и только два приоритета, Pri1 и Pri4, чтобы подчеркнуть влияние разных приоритетов. Каждое транспортное средство генерирует пуассоновский трафик [21, 22, 32] с экспоненциально распределенным временем прибытия пакетов со средним значением 0.1 сек. Размер пакета по умолчанию составляет 100 байт. Из-за высокоскоростных транспортных средств и динамической топологии состояние канала не должно быть таким хорошим, как в обычной беспроводной сети. Во всех симуляциях мы решили установить коэффициент ошибок по битам (BER) равным дБ в качестве условия канала по умолчанию. В таблице 2 показаны все остальные параметры по умолчанию, используемые при моделировании. Параметры по умолчанию для каждого приоритета [ i ], [ i ], AIFSN [ i ], RL [ i ] и TXOP [ i ] представлены в таблице 3.
Параметры по умолчанию для каждого приоритета [ i ], [ i ], AIFSN [ i ], RL [ i ] и TXOP [ i ] представлены в таблице 3.
| |||||||||||||||||||||||||||||
5.2.1. Количество повторных передач Pri1Мы исследуем влияние NR [1] на наши показатели производительности для обоих приоритетных сообщений. Мы используем NR [4] = 1 и NR [1] = 1,3 и 5. На рисунках 16 и 17 показан процент успешных передач по сравнению с N для сообщений Pri1 и Pri4 для разных значений NR [1] . Из рисунка 16 мы видим, что существует оптимальное значение NR [1]. По мере увеличения NR [1] с 1 до 3 надежность Pri1 повышается.Однако, поскольку мы продолжаем увеличивать NR [1] до 5, надежность Pri1 ухудшается, особенно при большом количестве транспортных средств. Это связано со следующими причинами. Мы увеличиваем NR [1] с 1 до 3, то есть увеличиваем количество сообщений Pri1 в 3 раза, но это требуется для возможности прохождения сообщений, то есть для повышения надежности системы. Следовательно, мы решили использовать NR [1] = 3 в качестве значения по умолчанию, как показано в таблице 4. Как видно из рисунка 17, чем выше NR [1], тем ниже процент успешных передач Pri4. Это связано с тем, что по мере увеличения NR [1] интенсивность трафика сообщений Pri1 увеличивается, оставляя меньше полосы пропускания для сообщений Pri4, снижая надежность Pri4. На рисунке 18 показана зависимость средней задержки от N для разных приоритетов и разных значений NR [1].Как и ожидалось, большие значения NR [1] вызывают большие задержки для обоих приоритетных сообщений. Однако средняя задержка обоих приоритетных сообщений все еще ниже, чем время жизни сообщений по умолчанию. Кроме того, из рисунков 16, 17 и 18 мы также наблюдаем, что большее количество транспортных средств (т. 5.2.2. Количество повторных передач Pri4В этом подразделе мы изучаем влияние NR [4] на производительность системы.Мы используем NR [1] = 3 (как указано в предыдущем подразделе) и NR [4] = 1 и 2. На рисунках 19 и 20 показан процент успешных передач по сравнению с N для сообщений Pri1 и Pri4, соответственно, для разные значения NR [4]. Мы наблюдаем, что по мере увеличения NR [4] с 1 до 2 происходит значительное снижение процента успешных передач. Это связано с тем, что по мере увеличения NR [4] интенсивность трафика сообщений Pri4 значительно увеличивается (напомним, что 95% трафика включают сообщения Pri4), увеличивая потенциальные коллизии, тем самым уменьшая процент успешных передач с обоими приоритетами. Сообщения. На рисунке 21 показана зависимость средней задержки от N для разных приоритетов и разных значений NR [4]. На основании этих результатов мы решили использовать NR [4] = 1 для остальной части моделирования. 5.2.3. Размер пакетаВ этом подразделе мы сосредоточим наше исследование на влиянии размера пакета L на производительность системы.На рисунках 22 и 23 показан процент успешных передач по сравнению с N для сообщений Pri1 и Pri4, соответственно, для различных значений L. Мы наблюдаем, что увеличение L вызывает значительное ухудшение надежности системы. Это связано с тем, что с увеличением L увеличивается интенсивность трафика, увеличивая количество коллизий и снижая надежность. На рисунке 24 показана зависимость средней задержки от N для разных приоритетов и разных значений L.Из рисунка 24 мы заключаем, что чем больше значение L, тем выше средняя задержка для обоих приоритетных сообщений. 5.2.4. Процент автомобилей Pri1В этом подразделе мы изучаем влияние процентного отношения автомобилей Pri1, P1. На рисунках 25 и 26 показан процент успешных передач по сравнению с N для сообщений Pri1 и Pri4, соответственно, для разных значений P1.Мы наблюдаем, что по мере увеличения P1 происходит значительное снижение процента успешных передач, особенно для большого количества транспортных средств. Это связано с тем, что по мере увеличения P1 интенсивность трафика сообщений Pri1 увеличивается, увеличивая потенциальные коллизии, что снижает процент успешных передач. На рисунке 27 показана зависимость средней задержки от N для разных приоритетов и разных значений P1. В соответствии с нашими наблюдениями, сделанными на рисунках 25 и 26, мы замечаем, что при более высоких значениях P1 средняя задержка увеличивается для обоих приоритетных сообщений. 6. Сравнение производительности транспортной инфраструктуры и специальных сетей В предыдущих разделах мы показали производительность предлагаемого нами протокола для различных сетевых архитектур (инфраструктурных и специальных) в сравнении с различными значениями параметров системы, такими как количество транспортных средств, N, размер пакета, L, и процент транспортных средств Pri1, P1. Более того, каждая архитектура использует уникальные параметры, такие как RL [ i ] (для инфраструктуры) и NR [ i ] (для ad hoc).В этом разделе мы стремимся сравнить производительность предлагаемого нами протокола с точки зрения надежности Pri1 как в автомобильной инфраструктуре, так и в специальных автомобильных сетях в зависимости от параметров системы. Мы не будем сравнивать протоколы с точки зрения средней задержки, поскольку сравнения уже были показаны в разделах 4 и 5. 6.1. Размер пакетаВ этом подразделе мы сравниваем производительность предлагаемого нами протокола в обеих сетях как функцию L.На рисунке 28 показано сравнение процента успешных передач Pri1 по сравнению с N для разных значений L в обеих сетях. Мы наблюдаем, что производительность Pri1 специальных сетей более чувствительна к значениям L, чем производительность инфраструктурных сетей. Это связано с тем, что в инфраструктурных сетях у нас есть механизм подтверждения (от RSU), который приводит к уменьшению количества фактических повторных передач. В специальных сетях, с другой стороны, количество фактических повторных передач фиксировано, как определено NR [ i ], что приводит к более высокой перегрузке и снижению надежности. 6.2. Процент автомобилей Pri1 На рисунке 29 показано сравнение процента успешных передач Pri1 по сравнению с N для разных значений P1 в обеих сетях. Как видно из рисунков 28 и 29, мы замечаем, что во всех случаях производительность сети инфраструктуры выше, чем у специальной сети.Однако, поскольку стоимость инфраструктуры высока, мы должны развертывать ее только в тех областях, в которых мы можем увидеть значительное улучшение производительности, которое оправдывает наши вложения. Из рисунка 29 мы также видим, что по мере увеличения количества транспортных средств N или увеличения процента приоритета 1 сети транспортной инфраструктуры имеют значительное преимущество в производительности. Такие системные характеристики имеют место в городских районах, где потенциальное количество транспортных средств и дорожно-транспортных происшествий может быть очень высоким.Поэтому мы рекомендуем IVC на основе инфраструктуры для городских районов, где мы можем увидеть значительное улучшение производительности, которое компенсирует наши инвестиции в развертывание. 7. ВыводыВ этой статье мы предлагаем использовать IEEE 802.11e в сочетании с повторными передачами для получения связи на основе приоритета как в инфраструктурных, так и в специальных транспортных сетях. Предлагаемый протокол полностью совместим как со стандартами IEEE 802.11, так и со стандартами IEEE 802.11e. С помощью моделирования на основе OPNET мы показали, что предлагаемый протокол является жизнеспособным решением для связи между транспортными средствами на основе приоритетов.Используя правильные настройки предложенных параметров протокола, [ i ], [ i ], AIFS [ i ], TXOP [ i ], RL [ i ] и NR [ i ], результаты нашего моделирования показывают, что мы можем обеспечить: (1) дифференциацию услуг для разных приоритетов сообщений, (2) очень низкие средние задержки (значительно ниже приемлемых 0,1 с для IVC) и (3) высокий процент успешных передач (т. е. высокий надежность) даже для большого количества автомобилей. На основании результатов моделирования, представленных в предыдущем разделе, мы пришли к выводу, что IVC на основе инфраструктуры обеспечивает лучшую производительность для сообщений с приоритетом 1 по сравнению со специальным IVC. Информация о доставке автомобиля с помощью Priority Auto Relocations Inc. из Аризоны в MIИнформация о доставке автомобиля с помощью Priority Auto Relocations Inc. из Аризоны в Мичиган — Транспортные обзоры
Общий рейтинг на маршрутеИз 3 отзывов Последние отзывы клиентовPriority Auto Relocations Inc. By UlaАвтотранспорт — Отличное обслуживание клиентов. Это была очень легкая и быстрая транспортировка.Моя машина добралась до Мичигана идеально … Priority Auto Relocations Inc. Автор Кристина и Роберт АндерсонПревосходное обслуживание — Мы очень довольны Priority Auto Relocatons, Inc. Я буду использовать их в будущем. Я только что жду … Priority Auto Relocations Inc. Автор J Snowden отличный опыт, им действительно не все равно — Я обязательно воспользуюсь этими ребятами снова! С ними было легко работать, простой договор, объяснили, как. Сколько это стоитЧтобы отправить автомобиль из Аризоны в МичиганСколько будет стоить ваш переезд?Получите предложение Car Transport.comПолучить цитаты TransportReviews.com — это сайт сообщества, которым гордится компания Moving Sites, LLC. © 2003-2021 TransportReviews.com. Все права защищены.Приоритетные системы общественного транспортаПриоритетные системы общественного транспорта Г. СОДЕРЖАНИЕ 1. КРАТКОЕ ИЗЛОЖЕНИЕ 2. ВВЕДЕНИЕ 3. ОБЛАСТИ ПРИМЕНЕНИЯ ДЛЯ АВТОБУСНОГО ПРИОРИТЕТА 3.1 Управление автопарком в городских районах 3.2 Защита выбранного маршрута автобуса 3.3 Схемы охраны окружающей среды 4. ВОЗМОЖНЫЕ СЦЕНАРИИ 4.1 Взаимодействие общественного транспорта и частного транспорта 4.1.1 Общественный транспорт на зарезервированных полосах 4.1.2 Общественный транспорт в полосах движения, зарезервированных для специальных транспортных средств 4.1.3 Общественный транспорт смешанный с частными потоками 4.2 Приоритет на последовательности перекрестков 4.2.1 Изолированный автобусный маршрут и сеть автобусных маршрутов 5. ДИНАМИЧЕСКИЕ МЕТОДЫ ATT 5.1 Обнаружение / обнаружение автомобиля 5.2 Сигналы адаптивного плана 5. 5.2.2 Приоритетное добавление 5.2.3 Компенсация 5.2.4 Запретить 5.3 Сигналы оптимизированного плана 5.3.1 Взаимодействие частного и общественного транспорта 5.3.2 Дополнительные этапы 5.3.3 Защита автобусной остановки 5.3.4 Взаимодействие сигналов 6. АСПЕКТЫ РАСПОЛОЖЕНИЯ АВТОМОБИЛЕЙ / ОБОРУДОВАНИЯ ДЛЯ ОБНАРУЖЕНИЯ 6.1 Место на борту 6.1.1 Использование только одометра 6.1.2 Использование одометра и дорожных маяков 6.2 Обнаружение прохода и присутствия 6.2.1 Расположение извещателей 6.2.2 Индуктивные петли 6.2.3 Транспондеры ПРИЛОЖЕНИЕ А. ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЗАЦИИ ПТ В ТУРИНЕ A.1 Описание A.2 Архитектура системы A.3 Функция управления автопарком A.3.1 Местоположение транспортного средства А.3.2 Взаимодействие с динамическим контроллером светофоров ПРИЛОЖЕНИЕ Б. B.1 Описание B.1.1 Дополнительные этапы БИБЛИОГРАФИЯ 1. КРАТКОЕ ИЗЛОЖЕНИЕ Методы приоритета шины в этом документе описаны в шести главы: Глава 2 : объясняет цель документа и как это может быть лучше всего использовал. Глава 3 : перечисляет возможные поля в рамках управления дорожным движением и командировками и системы управления, где функции приоритета шины могут повысить эффективность управляющего воздействия.Для каждого поля ожидаемый вклад в автобус описана приоритетная функция. Глава 4 : представлены типичные условия, при которых схема приоритета шины требуется для улучшения условий проезда. Проблемы и выделены характеристики каждого сценария и предложены решения. Глава 5 : описывает возможности, предлагаемые принятием системы динамического управления сигналами, оборудованные для приоритета шины. Глава 6 : описывает решения, предлагаемые текущей технологией для обнаружение / обнаружение транспортного средства для удовлетворения требований приоритета автобуса системы. 2. ВВЕДЕНИЕ Одной из целей техники приоритета шины может быть улучшение обслуживания . регулярность , что обычно означает соответствие номинальным расписаниям и / или успехов. Регулярное обслуживание гарантирует хорошую вместимость. (выражается в «пассажирах в час»): основная цель транспорта. управление. Кроме того, это упрощает планирование обслуживания, сокращает потерю времени на пассажиры на автобусных или трамвайных остановках, повышают удовлетворенность пользователей и снижают нагрузку на водителя стресс. Типичными источниками сбоев в обслуживании являются: колебания спроса со стороны пользователей, трафик. управление заторами и светофором. Уменьшение беспокойства, вызванного путем контроля светофора и использования приоритетных функций составляет настоящий успех. Вторая важная цель — это увеличение на коммерческой скорости . Движение приоритет сигнала способствует сокращению времени в пути транспортного средства PT и может увеличить грузоподъемность или уменьшить количество транспортных средств требуется для предоставления услуги. Третья задача, которая становится все более важной для транспорта управления, это сокращение загрязнения . Меньшее количество остановок на светофоры и меньшее время простоя в очередях — прямое влияние трафика. приоритет сигнала и передовые методы управления сигналом светофора. Конечная важная цель — более рациональное использование энергии. Цель этого документа — представить обзор методов приоритета шины как разработаны и протестированы в различных системах и контекстах по всей Европе. 3. ОБЛАСТИ ПРИМЕНЕНИЯ ДЛЯ ПРИОРИТЕТА АВТОБУСОВ 3.1 Управление автопарком в городских районах Некоторые системы AVM (автоматический мониторинг транспортных средств), например, работающая в Турин, внедрите меры по контролю за автопарком, направленные на упорядочение общественного транспортное обслуживание. Под регулярностью обслуживания понимается соответствие к запланированному расписанию или интервалу между следующими машинами. Одним из основных необходимых управляющих воздействий для такой системы является выборочная шина. приоритет на сигнальных перекрестках. Эта функция позволяет системе уменьшить время в пути опоздавших транспортных средств. 3.2 Защита выбранного маршрута автобуса От выбранных автобусных маршрутов может потребоваться регулярное и регулярное обслуживание. как можно быстрее между любым пунктом отправления и пунктом назначения. Это может быть достигнуто резервирование автобусной полосы только для общественного транспорта и предоставление абсолютного приоритета на сигнальных развязках. Эти меры делают крейсерскую скорость движения общественного транспорта по маршруту равной по возможности постоянным, избегая любых остановок, кроме запланированных автобусных остановок. 3.3 Схемы охраны окружающей среды Схемы защиты окружающей среды направлены на минимизацию уровней загрязняющих веществ. испускается из транспортных средств. Этого можно добиться, перемещая автомобили внутри сети как можно более «плавные», стараясь минимизировать остановки и задержки на перекрестках. Для мер приоритета шины эта цель может быть достигнута только в том случае, если приоритет предоставляется службам, для которых предсказуемое прибытие на перекрестки может быть при условии. 4. ВОЗМОЖНЫЕ СЦЕНАРИИ 4.1 Взаимодействие общественного транспорта и частного транспорта В отношении таких целей, как: Ожидается, что наилучшие результаты от реализации приоритета шины будут службы, работающие на охраняемых полосах. Для служб, которые работают в смешанных полосах движения с частным трафиком, стратегии что может сократить количество остановок у светофоров и время нахождения в очереди актуальны. 4.1.1 Общественный транспорт на зарезервированных полосах Общественный транспорт, курсирующий по охраняемым полосам движения, относится к классу автомобиль, которому может дать эффективный приоритет любой системой приоритета снабжен функциями выборочного приоритета. Частота приоритетных запросов — единственное серьезное ограничение для абсолютного приоритетное положение. Это ограничение может привести к изменениям как в управлении сигналами светофора, так и в поставщик приоритетного запроса. Когда перекресток пересекает только одна приоритетная служба, частота должны определяться на основе номинальных интервалов движения транспортных средств на оба направления службы. Когда перекресток пересекают несколько служб, частота должна рассчитываться на основе пробега всех транспортных средств, которые будут подойти к перекрестку. В любом случае, если максимальная частота несовместима со средним циклом предусмотренный для перекрестка, некоторые ограничения должны быть применены к приоритетный запрос.Разумные критерии: а) Уменьшите уровень приоритета для одной или нескольких услуг с «абсолютного» до «высокий». Это правило может применяться только в том случае, если службы не используют один и тот же маршрут. В противном случае машины с более низким приоритетом могут помешать продвижению абсолютного приоритетные автомобили. б) Запросить приоритет только для опаздывающих автомобилей. Это правило может применяться либо к одному, либо к подмножеству, либо ко всем приоритетные услуги.Некоторые службы могли бы сохранить абсолютный приоритет, если бы в результате частота запросов становится сопоставимой со средней длиной цикл светофора. Остальные автомобили можно было снабдить «высоким» уровнем. приоритет. Как следствие спецификации a), определенной выше, возможные конфликты между приоритетные запросы одного или разных уровней должны решаться контроллер пересечения . 4.1.2 Общественный транспорт в полосах движения, зарезервированных для специальных транспортных средств «Зарезервированная полоса» определяется здесь как незащищенная полоса, которая зарезервирована для общественный транспорт. Доступ к зарезервированной полосе запрещен. частное движение, но может быть разрешено для транспортных средств другой государственной службы провайдеры (машина скорой помощи, полиция, такси и т. Для этого класса транспортных средств прогнозы времени в пути имеют более высокие расхождения.Контроль перекрестков может по-прежнему обеспечивать высокий уровень приоритета. Назначение приоритета на перекрестках все еще может быть ограничено частота приоритетных запросов. Проблемы из-за возможных препятствий на пути автомобиля. прогресс может произойти. Спецификации a) и b), определенные в 4.1.1, также могут применяться только к этому контексту. в некоторых конкретных случаях: зарезервированные полосы, используемые несколькими службами, и все они предоставляются с тем же уровнем приоритета и не мешать транспортным средствам с более низким уровнем приоритета. приоритет. В других случаях должен быть установлен общий уровень приоритета (ниже абсолютного). определен для набора служб, использующих зарезервированную полосу. Оценка частота запросов может быть очень сложной: конфликты с другими услуги, использующие разные зарезервированные полосы, могут присутствовать в нескольких перекрестки. 4.1.3 Общественный транспорт смешанный с частными потоками Важность, приписываемая отдельной услуге, должна привести к определению веса приоритетных запросов для разных автомобилей. Также для этого класса транспортных средств точность прогноза времени в пути составляет достаточно для формулирования приоритетных запросов, но приоритет назначение сильно зависит от особенностей контроля перекрестков.Действительно, в этом контексте настоящая проблема касается частного трафика, который может препятствовать движению транспортного средства к перекрестку, расположенному ниже по течению. Органы управления перекрестками должны быть оборудованы средствами разметки полосы движения. Действие по разминированию должно начинаться с прогноза времени прибытия первого транспортного средства. Этот прием можно реализовать, увеличив вес входящего ссылка, используемая автомобилем, и, следовательно, влияющая на функциональную оптимизация, выполняемая контроллером перекрестков. Подобные действия в целом могут нарушить движение транспорта. контроль. Следовательно, приоритетные запросы на автомобили, смешанные с частным трафиком. должно быть ограничено. Приоритетный запрос для транспортных средств, смешанных с частным движением, должен быть ограничен крайне поздние автомобили. Большое количество возможных приоритетных запросов, которые могут быть сгенерированы при сетевой уровень предлагает общую спецификацию: вес приоритета запросы также следует определять в соответствии с дисперсией прогнозов время прибытия автомобилей. Контроллер перекрестка должен иметь возможность управлять весами приоритетных запросов. 4.2 Приоритет на последовательности перекрестков В предыдущем разделе анализируются возможные сценарии приоритета шины при сигнализационный переход по разным топологическим схемам пересечение. Сформулированы общие характеристики и соображения. как для контроллера локального уровня, так и для инициатора приоритетного запроса о запрашиваемый уровень приоритета и точность времени прибытия прогноз. Эти соображения должны быть учтены другими при запросе приоритета. в сценариях, где перекрестки не изолированы, а являются частью контролируемой сеть. Самый простой и наиболее частый из этих случаев можно представить последовательностью контролируемых переходов в коридоре. В этом сценарии информационный поток между локальными контроллерами или даже от локального контроллера к системе, которая запрашивает приоритет, требуется чтобы учесть задержки, вносимые последовательностью контролируемые перекрестки, пересекаемые общественным транспортом. Обмениваемая информация должна включать информацию о прогнозируемых время прибытия транспортного средства на первый пересекаемый перекресток, время в пути между контролируемыми перекрестками и дополнительные задержки введены перекрестками, которые будут пересекаться. Если рассматривать сеть в целом, прогноз прибытия, предусмотренный в предыдущий раздел должен стать предсказанной временной траекторией вдоль коридор или сеть в зависимости от: Взаимодействие между системами значительно усложняется по мере того, как сценарий меняется с изолированного автобусного маршрута, идущего по коридору, на сеть автобусных маршрутов, проходящих в контролируемой сети. 4.2.1 Изолированный автобусный маршрут и сеть автобусных маршрутов В случае, если автобусный маршрут проходит по коридору или в последовательности контролируемых стыков: взаимодействие между перекрестками может быть решено как на локальных на уровне контроллера и на уровне инициатора приоритетного запроса. В этих условиях идентификация автомобиля не требуется, потому что все машины следуют по тому же пути. Тогда взаимодействие можно было бы урегулировать на местном уровне.Это должно позволить оценка задержек, вызванных перекрестками на маршруте движения транспортного средства, будет оцененный. С другой стороны, этот подход требует, чтобы локальный контроллер был способен оценка времени в пути между перекрестками. Поскольку оценка времени в пути может усложниться, если маршрут включает автобусных остановок такое решение можно предусмотреть только тогда, когда топология маршрута позволяет использовать фиксированное время в пути. Наличие автобусных остановок или сложная топология маршрута потребуют взаимодействие должно быть разрешено на уровне инициатора приоритетного запроса. При таком подходе прогнозирование задержек на маршруте становится более точным. сложно, особенно когда контроль перекрестка приближается к полному децентрализация, но время в пути можно оценить с гораздо большей точность. Когда предполагается, что приоритет будет отдаваться транспортным средствам, курсирующим по разным маршрутам на сети проблема разрешения конфликтов на каждом пересечении различные маршруты и определение уровня приоритета для каждого маршрута. Идентификация транспортных средств является важным моментом вышеупомянутого проблема, и это приводит к отделению функций локального контроллера от приоритетный запросчик. Как указано в разделе 4.1, эти проблемы необходимо решать в первоочередном порядке. уровень инициатора запроса, в то время как контроллер локального уровня должен иметь возможность управлять приоритетные запросы с разным уровнем приоритета. Снова взаимодействие между управлением сигналом трафика и инициатором запроса приоритета может быть предусмотрено для оценки задержек общественного транспорта в сети контролируемые соединения. 5. ДИНАМИЧЕСКИЕ МЕТОДЫ ATT В среде ATT динамический приоритет PT обычно рассматривается как функция системы UTC (контроль городского движения); эти системы обычно основаны на определение политики контроля «минимальных затрат»; разные элементы объединены для определения «стоимости» полиса: частные автомобили интерес (минимизация времени, потерянного в очереди и / или времени в пути), общественный потребности в транспортных средствах (приоритет, регулярность обслуживания), экологические ограничения (минимизация очередей и остановок с целью уменьшения загрязнения, избежание скопление). PT-трафик рассматривается как компонент глобального трафика, при этом особенности и потребности; по этой причине большинство систем UTC стремятся оптимизировать общую производительность дорожной сети, внедрив ПТ приоритет как ограничение к проблеме оптимизации, отделяя всего лишь Возможна проблема приоритета PT по сравнению с контролем частного трафика. Система UTC в реальном времени способна реагировать за короткий промежуток времени на каждый возмущение в трафике, обычно изменяющее настройку трафика сигналы на перекрестке, позволяющие автобусу проехать без остановки (в этом В этом случае прибытие транспортного средства PT рассматривается как «возмущение»).В этом подход, система должна уметь выполнять следующие задачи: быстро и точно распознать автомобиль PT, чтобы удовлетворить потребности стратегия управления, осуществить эффективную и быструю оптимизацию местной политики, чтобы свести к минимуму недостатки для частного трафика (например, остановившиеся автомобили в направление пересечения, когда автобус имеет приоритет), выполнять процедуры, связанные с приоритетной задачей, с подходящей скоростью. 5.1 Обнаружение / обнаружение автомобиля Подходы динамического ATT для приоритета автобуса требуют наличия транспортного средства система обнаружения, позволяющая прогнозировать приближение ПТ в режиме реального времени. Систему обнаружения PT можно реализовать тремя основными способами: Индуктивные шлейфы на зарезервированной полосе ; этот метод дает либо Наличие ТС или проезд над локацией.Обнаружение не может быть зависит от транспортного средства, поэтому детекторы должны быть расположены в зарезервированных зонах, чтобы избежать путаница с другими транспортными средствами. Конфигурации шлейфов могут быть предоставлены для каждого перекресток, нацеленный на отслеживание движения транспортного средства в пределах сигнализируемого площадь пересечения. Маяк или транспондер ; этот метод позволяет конкретному автомобилю обнаружение и ограниченный обмен информацией, такой как уровень требуемого приоритета и прогнозировать время прибытия. Интеграция UTC-AVM ; прогноз прибытия общественного транспорта предоставляется через AVM, который обычно может обеспечивать обновление информации с помощью переменных частота, которая не ограничена фиксированными местоположениями. Производительность, достигаемая системой UTC, зависит от типа возможность обнаружения, а также о достоверности информации, предоставленной система обнаружения. 5.2 Сигналы адаптивного плана Этот подход основан на концепции «зеленого вызова»: обнаруженный автомобиль PT, который приближается к перекрестку, активирует запрос на зеленый; местный Контроллер реагирует, подчиняясь нескольким ограничениям, либо расширением текущая зеленая стадия или ранняя активация подходящей стадии ( подходящий этап может быть зарезервирован только для общественного транспорта или для смешанного движение). Основные функции, которые должен выполнять локальный контроллер: описаны в следующих подразделах: 5.2.1 Приоритетный отзыв Когда автобус прибывает на красный этап, подходящий зеленый этап запускается, как только возможно, с ограничением, что конкурирующие этапы должны проходить в обычном заказ, хотя и на минимальную длину. Это основная функция, характеризующая приоритетный подход, эффективность этой функции зависит от точности прогноза прибытия время приближения ТС. 5.2.2 Приоритетное добавление Когда автобус приближается к извещателю при включенной зеленой ступени, ступень может быть увеличен, чтобы автобус мог проехать без задержки. Расширение вычисляется с использованием времени автономной работы шины между детектором и стоп-линия. В случае прибытия более чем одного участника на один этап расширения могут накапливаться до фиксированного максимума. Эта функция дополняет функцию, описанную в 5. 5.2.3 Компенсация Когда цикл изменяется процедурой приоритета, следующий цикл также изменен, чтобы восстановить время, потерянное неприоритетными потоками. В время, добавленное к этапам цикла, может быть зафиксировано для каждого пересечения или рассчитывается динамически в зависимости от спроса на трафик. Эта функция работает как дополнение к функциям «зеленый звонок» с целью балансирования воздействия приоритета на частные потоки. 5.2.4 Запретить При наличии сильных потоков ПК введение компенсации неприоритетных этапы, как описано в 5.2.3, могут быть трудными из-за последовательности звонки. Более того, в некоторых случаях полный приоритет считается неприемлемым. нарушает транспортный поток.В этих случаях приоритет разрешается в только чередующиеся циклы. 5.3 Оптимизированные плановые сигналы Системы ATT, которые принимают оперативную оптимизацию планов сигналов, основаны на прогнозы дорожной обстановки. Стратегии управления движением динамически планируются заранее, чтобы соответствовать как частный трафик, так и PT оценили спрос. Оптимизация стратегии ориентирована на выбор зеленого сплита и цикла. время для каждого пересечения, а также на синхронизацию между соседними сигнальные переходы. 5.3.1 Взаимодействие частного и общественного транспорта Представление общественного транспорта по отношению к частному автомобилю может быть разным в зависимости от используемой системы. Некоторые из наиболее часто используемых представлений:  или любое сочетание вышеуказанных критериев. Каким бы ни был вид автомобилей PT, баланс между общественными и частные автомобили могут быть настроены для достижения требуемого уровня приоритет »(т. е .: приоритет является абсолютным, если ставка установлена как 1 общедоступная vehicle = 500 личных автомобилей). Когда общественные и частные транспортные средства пересекают проезжую часть, их взаимодействие должно принимать во внимание. 5.3.2 Дополнительные этапы Необязательные этапы — это этапы, которые обычно не включаются в цикл, но можно соответствующим образом спланировать всякий раз, когда приближается автомобиль PT, обладающий указанными условия. Например, эта функция используется, когда автомобиль PT может получить выгоду от поворота. движения, недоступные для частного трафика. Эти этапы можно спланировать в рамках цикла, либо сопоставив их с PT. прогнозы прибытия или как ответ на сценические вызовы дорожных детекторов. Продолжительность необязательного этапа обычно варьируется в фиксированных пределах, поэтому можно преодолеть такие проблемы, как ошибки прогноза и звонки, которые близко друг к другу. При вызове необязательного этапа алгоритм оптимизации вычисляет длину необязательной длины этапа, которая уравновешивает трафик спрос против стоимости ожидающего автомобиля ПТ. Типичные базовые сценарии: Дополнительный этап активируется, когда ожидается, что транспортное средство будет близко к пересечение. Если прогноз достаточно точный, то этап можно активировать. пока не будет подтверждено, что автомобиль был выпущен. Возможны специфические особенности автомобиля при наличии обмена информацией. Один датчик приближения обеспечивает фиксированное время приближения и этап должен приводиться в действие на фиксированное время, достаточное для того, чтобы убедиться, что автомобиль удается пересечь перекресток. Потому что выпущенный автомобиль не управляется непосредственно время этапа тратится на то, чтобы обеспечить эффективное прохождение ПК. Особые функции приоритета транспортного средства могут быть реализованы, если детекторы транспондеры. Детектор, расположенный рядом со стоп-линией, предназначен для обнаружения присутствия ожидающий автомобиль. Дополнительный этап может быть продлен в фиксированных пределах, если детектор больше занят. Этот вид детектора предоставляет информацию что транспортное средство было выпущено в нисходящее звено, если время пересечения предполагается (Предполагается, что транспортное средство освобождено после времени перехода, следующего за конец занятости извещателя). Особые функции приоритета транспортного средства могут быть реализованы, если детекторы транспондеры. Набор детекторов дополняет возможности, доступные только при таком подходе. детектор с выпущенной информацией о транспортном средстве. Сложные схемы, например, разные автобусные маршруты, требующие разных дополнительных ступени для разных поворотных движений, могут быть реализованы. Возможны также комбинации базовых сценариев, направленные на улучшение эффективность системы обнаружения: прогноз на основе обнаружения на дороге Схема расположения датчиков приближения и присутствия и выхода два примера. 5.3.3 Защита автобусной остановки Когда проезжая часть является общей, очередь из частных автомобилей может препятствовать проезду. подъезд к автобусной остановке вверх по течению, из-за чего поездка PT задерживается. Чтобы устраните эту задержку, система управления должна уменьшить занятость подъезд к перекрестку, когда автобус приближается к остановке в окрестности перекрестка. 5.3.4 Взаимодействие сигналов Системы управления, которые оптимизируют долгосрочные прогнозы, могут улучшить свой PT. приоритет, если время освобождения общественного транспорта от перекрестков вверх по течению сообщается с узлами ниже по течению.Этот метод преодолевает возможные отсутствие детекторов и обеспечивает приближающийся прогноз PT с предварительным уведомлением. Когда используется этот метод, информация о дорожном детекторе обеспечивает приближается обновление прогноза. Может быть создано временное окно, в котором автомобиль ожидается наезд на детектор: 6. АСПЕКТЫ РАСПОЛОЖЕНИЯ / ОБОРУДОВАНИЯ ДЛЯ ОБНАРУЖЕНИЯ АВТОМОБИЛЕЙ В этом разделе представлен обзор наиболее часто используемого оборудования для автомобилей. Сообщается об обнаружении. Описание направлено на то, чтобы выделить особенности техники. с широким описанием функций и без уточнения технологических деталей которые зависят от конкретных приложений и используемого оборудования. 6.1 Место на борту Расположение на борту — это один из методов, который можно использовать для динамического предоставления положение автомобилей в сети и время прибытия грузов Информация. Этот метод применим как к централизованной, так и к децентрализованной архитектуре. В автомобили периодически опрашиваются системой, которой необходимо знать текущий положение и выработать прогноз времени прибытия. Самые передовые методы позволяют прогнозировать время в пути, наблюдая историческое, а также текущее время присутствия транспортных средств в определенных частях автобусные маршруты.Улучшение прогноза приближающегося PT достигается за счет варьируя частоту запросов о местонахождении транспортного средства и, как следствие, обновление данных прогноза: чем ближе ТС находится к контролируемой развязке, тем чаще всего производится выборка местоположения транспортного средства. 6.1.1 Использование только одометра Один из успешных методов использует одометр, подключенный к колесу автомобиль, подсчет обрабатывается бортовым компьютером, который также содержит карту маршрута транспортного средства. Алгоритмы идентификации предусмотрены для того, чтобы избежать возможных пропущенных автобусные остановки и небольшие отклонения от теоретического маршрута. Положение автомобиля сбрасывается водителем, когда автомобиль достигает Терминал. Этот метод делает информацию о местонахождении транспортного средства доступной в любое время с помощью связавшись с автомобилем. 6.1.2 Использование одометра и дорожных маяков Тот же метод определения местоположения транспортного средства, который описан в 6.1.1, можно использовать в архитектура, которая также включает дорожные маяки. Знание позиции маяков на карте маршрута используется бортовым компьютером, либо в дополнение к активации двери или нет, чтобы обновить смету автомобиля место расположения. 6.2 Обнаружение прохода и присутствия Когда система определения местоположения транспортного средства, интегрированная с системой UTC, недоступна, дорожные детекторы — единственный источник информации о перекрестке контроллеры, предназначенные для обеспечения приоритета PT. 6.2.1 Расположение извещателей Существует множество подходящих локаций для детекторов общественного транспорта. Для целей приоритета автобуса они должны предоставлять максимально достоверную информацию. как можно больше о транспортных средствах PT, которые собираются приблизиться к контролируемым переходы. Для динамических стратегий требуется приближающийся детектор как можно дальше от объекта. стоп-линия, чтобы информация могла быть предоставлена с длительным уведомлением. Лучшее местоположение обычно у входа в ссылку, сразу после пересечения вверх по течению, так что неопределенность, вносимая возможными времени ожидания на этом перекрестке можно избежать. Если на подъездном пути есть автобусная остановка, лучше всего расположить детектор. вниз по течению от автобусной остановки, поэтому неопределенность из-за времени остановки может быть избегали. Датчики присутствия необходимо размещать как можно ближе к стоп-линии, чтобы они также могут предоставить выпущенную информацию о транспортном средстве (см. 5.3.2). Присутствие детекторы не подходят, когда зарезервированная полоса PT не предусмотрена в качестве очереди частных автомобилей может держать автомобили PT в ожидании вне зоны обнаружения площадь. Когда общественный транспорт подъезжает к перекрестку по проезжей части со смешанным движением и затем ему необходимо вызвать необязательный этап, чтобы совершить поворот, который находится в конфликт с частным трафиком, датчик присутствия за стоп-линией может быть используется, расположенный на перекрестке, где автомобиль PT ожидает поворота. В этой ситуации, в некоторых случаях активация точки смены, управляемая Автомобиль PT, может использоваться в дополнение к сигналу присутствия. Как было подчеркнуто в п. 5.3.2, детекторы выхода часто бывают полезными, чтобы подтвердить фактическое прохождение ПТ через перекресток. Для этого наиболее подходящее место для извещателей — после ПТ. поворот, когда транспортное средство полностью выезжает из перекрестка. 6.2.2 Индуктивные петли Индуктивная петля, вероятно, самая распространенная технология для автомобилей. обнаружение. Его можно использовать в частном случае обнаружения ПТ транспортных средств. К петлям, размещенным в пределах зарезервированных полос PT, предъявляются те же требования, что и к петлям. предназначен для обнаружения частных транспортных средств. Особый дизайн и настройка должны быть приняты там, где петли размещены в проезжие части, используемые частным и общественным транспортом, чтобы избежать нежелательное неправильное обнаружение. Разница в массе между частным и общественным транспортным средством обычно составляет параметр, используемый для их различения. Особое внимание следует уделять размещению детекторов PT, если есть вероятность быть проблемы с маскировкой из-за припаркованного транспорта. Незаконная парковка должна быть тоже считается. 6.2.3 Транспондеры Эти устройства обнаружения позволяют обнаруживать оборудованные автомобили, а также ограниченный обмен статической информацией, которая может быть дополнительно сохранена (я.д .: номер автобусного маршрута, запрошенный уровень приоритета). Эти системы обеспечивают оборудованный автомобиль пассивным устройством связи. (транспондер), который передает сохраненную информацию, когда автомобиль наезжает дорожные детекторы. В этом случае дорожные детекторы — это антенны, которые получать данные при передаче источника питания. Использование такой системы позволяет идентифицировать конкретные автомобили и следовательно, реализация функций конкретного транспортного средства.Кроме того, они устраняют проблемы из-за совместного использования проезжей части с другими транспортные средства, которые теперь не имеют приоритета, поскольку только оборудованные транспортные средства можно обнаружить. ПРИЛОЖЕНИЕ А. ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЗАЦИИ ПТ В ТУРИНЕ В этом приложении приводится подробное описание системы с особыми акцент на функции приоритета шины. Приоритет автобуса на развязках доступен в эта система как действия системы управления автопарком PT для регуляризации сервис. A.1 Описание Система, действующая в Турине, представляет собой телематическую систему, предназначенную для обеспечения помощь общественному транспорту с централизованным управлением автопарком архитектура. Доступны следующие основные функции: Задача системы — контроль сбоев и возмущений услуга PT, направленная на предоставление услуг, которые будут такими же пунктуальными и регулярными, как возможный. Такой результат достигается за счет интеграции системы с система управления светосигнальной сетью и информационная система заказчика. A.2 Архитектура системы Архитектура основана на системе мобильной радиосвязи, которая позволяет передача данных и голоса между центром управления и общественным транспортом. Основными компонентами системы являются: A.3 Функция управления парком Управляющее действие парка PT основано на двух основных функциях: обработка местоположения и времени в пути транспортного средства регуляризация услуг А. Эта функция выполняется интегрированным образом бортовым и центральным системы. Бортовая система занимается оценкой текущего положения транспортное средство по маршруту с использованием данных, предоставленных эдометром, который установлен на колесе автомобиля. Положение автомобиля передается на центр по запросу. Цели программного обеспечения для определения местоположения, реализованного на центральном компьютере: Оценка местоположения выполняется со статистической фильтрацией; оценка рассчитывается путем сравнения измерений эдометра (разрешение 2 м) и описание маршрута, хранящееся в EPROM. А.3.2 Взаимодействие с динамическим контроллером светофоров Взаимодействие системы с централизованным диспетчером светофоров предоставлен (зеленый этап вызова) как динамический приоритет СТ на сигнализируемой стыковки — основное требование для контроля нарушений правил движения флота. Контроллер сети светофоров, используемый в Турине, — это система UTOPIA, которая включает локальные контроллеры типа SPOT, которые координируются трафиком центр управления (см. Приложение Б). Важными аспектами приоритета на сигнальных узлах являются:  Этот приоритет порядок должен быть динамическим, чтобы соответствовать алгоритму регуляризации требования Этот приоритет порядок должен быть динамическим, чтобы соответствовать алгоритму регуляризации требованияИнтегрированная система выполняет следующие функции: Доступная точность для времени приближения транспортного средства зависит от прогноза. горизонт: <10% для горизонта около 5 минут, но до 30% для горизонта горизонт целых 30 минут. Информация о приближающемся транспортном средстве отправляется в систему UTC, как только автомобиль находится в пределах двух минут (горизонт перекрестка оптимизатор) пересечений. Задержки транспортных средств для определения необходимого уровня приоритета вычисляется центральной системой путем сравнения положения отдельного автомобиля с «виртуальное расписание» (рассчитанное в режиме онлайн на основе номинальных расписаний и вперед).Для того, чтобы заранее спрогнозировать нарушения в обслуживании, задержки транспортных средств. рассчитываются на основе прогнозов их прихода к поставленным передовым целям. по маршруту. ПРИЛОЖЕНИЕ Б. КОНТРОЛЛЕР ТОЧЕЧНОГО ПЕРЕСЕЧЕНИЯ В этом разделе содержится описание основных концепций SPOT. контроллер перекрестка, который представляет собой блок UTC, предназначенный для оптимизации сигнала настройки отдельного перекрестка, изолированной небольшой сети контролируемых перекрестки, а также сеть, контролируемая центральной системой. B.1 Описание Функция управления, которая действует на уровне перекрестка, определяет настройки сигналов, применяемые к сигналам светофора путем оптимизации подходящего функционировать в соответствии с текущей дорожной ситуацией на перекрестке. В оптимизация выполняется на «временном горизонте» следующих 120 секунд и повторяется каждые три секунды. В результате оптимальные настройки сигнала: Фактически в работе всего три секунды.Замкнутый контур управления таким образом полученное можно рассматривать как «управление обратной связью по разомкнутому контуру» или как приложение. концепции «Rolling Horizon». Чтобы гарантировать оптимальность и надежность управления на на сетевом уровне функция, оптимизированная контроллером, была разработана принятие концепции «сильного взаимодействия»: функция учитывает состояние соседних перекрестков, таким образом сохраняя возможность замкнутого контура построение динамической координации сигналов и ограничено пределами, заданными регулятор уровня области (оставаясь чувствительным к движению в зависимости от критерии). Функция определяется суммой различных взвешенных элементов затрат. рассчитан на весь горизонт оптимизации. Цель оптимизации: при соблюдении таких ограничений, как: где условие (2 ) представляет собой ограничения на длину этапов. Виды затрат: 1. Время потеряно автотранспортом на входящих линиях. 2. Останавливает на входящих ссылках. Остановки — это транспортные средства, которые прибыть на стоп-линию, когда есть очереди. 3. Превышение очереди на входящих каналах (этот термин обозначает очереди превышение пороговых значений безопасности, которые пропорциональны максимальной мощности ссылки). 4. Потеря времени на выезде из-под транспортных средств, выезжающих с перекрестка. (эти члены приводят в действие принцип сильного взаимодействия на пересечении уровень. Они обеспечивают координацию контроля перекрестков и устойчивость контроля на уровень площади). 5. Время, потерянное общественным транспортом. должно быть уделено первоочередное внимание пересечение. 6. Отклонение от контрольного плана , предоставленного центральным уровнем (это элемент вызывает «сильное взаимодействие» с уровнем области и позволяет взаимодействия между двумя уровнями, которые будут динамически изменяться). 7. Отклонение от настройки сигнала , определенное на предыдущей итерации (этот элемент способствует плавности контроля площади) Элементы затрат оцениваются на всем горизонте на основе трафика. правила распространения, учитывающие настройки сигнала и ограничения на минимальную и максимальную длину ступени. Распространение трафика на перекрестке начинается с предоставленной государственной сметы. наблюдателем и использует все определенные параметры трафика. Требуемая входная информация следующая: Для входящих ссылок: 1. Счетчик трафика 2. Прогнозы трафика, предоставляемые соседними диспетчерами (Прогнозы соответствуют транспортным средствам, которые выезжают с перекрестков вверх по течению.An приближение выполнено в предположении, что исходящие потоки однородны при интервалы). 3. Прогнозы прибытия общественного транспорта будут с учетом приоритета. Для исходящих ссылок: 4. Стратегии управления, определяемые подчиненными контроллерами Общественный транспорт представлен взводом равнозначных транспортных средств, которые отображаются в виде кривых вероятности с центром в прогнозируемом времени прибытия. В настоящее время безусловным приоритетом машин соответствует четыре-пятьсот. эквивалентных транспортных средств и вес транспортных средств с нормальным приоритетом зависит от предопределенный вес для соответствующих услуг. Когда не запрашивается приоритет транспортного средства PT, контроллер перекрестка обеспечивает оптимальное управление сигналом светофора в соответствии с условиями частного трафика Только. После этого контроллер перекрестка может удовлетворять приоритетные запросы. даже без какого-либо существенного нарушения частного трафика через:  Эффективность управления перекрестком зависит как от наличия PT прогнозы времени прибытия транспортного средства обновляются во времени в соответствии с прогресс и количество запросов, которые необходимо решить вместе. Экспериментирование выполненное продемонстрировало, что система приоритетов способна обеспечить абсолютную приоритет транспортного средства PT, приближающегося к перекрестку один раз за цикл (в защищенные полосы) и одновременно для оптимизации управления частным трафиком. B.1.1 Дополнительные этапы Необязательные этапы включены в сигнальный цикл в течение горизонта. оптимизация, когда прогнозируется ожидание или приближение общественного транспорта подходящие ссылки. В поисках оптимальной стратегии для каждого шага горизонта возможен этап. рассчитывается по следующему алгоритму: Первый этап оптимизации (длинный горизонт) Необязательные этапы можно пропустить, если они не улучшают оптимизацию. стоимость функции, которая на этом уровне учитывает изменение стратегии и только приоритетные расходы на автобус. Второй этап оптимизации (короткий горизонт) а) Выберите этап, следующий за этапом предыдущего этапа в рамках всего цикла. (включая все дополнительные этапы) а1) Если выбранный этап не является необязательным, это единственно возможный следующий этап. сцена. а2) Если выбранный этап является необязательным, наличие машин в очереди и оценивается наличие прогнозируемых приближающихся машин на соответствующем звене.Если оценки показывают, что этап нужен, это возможный следующий этап иначе тест повторяется, выбирая следующий этап в течение всего цикла. Приближение к прогнозам транспортных средств PT в форме вероятностных распределений может также проводиться по информации, предоставляемой специальными детекторами установлен на дороге. В настоящее время используются два метода приоритета шины: Обнаружение присутствия Один остановившийся ожидающий автомобиль генерируется на соответствующем звене, в то время как петля занят. Детектор единственного приближающегося транспортного средства Каждый раз, когда из контура поступает вариация включения-выключения, одна приближается прогноз по транспортному средству производится по соответствующей ссылке (обнаруженное транспортное средство задержку можно выбрать). Следующие машины будут скапливаться у стоп-линии до начала благоприятный факультативный этап. На дополнительном этапе машины в очереди выпускается из расчета одна машина за шаг. БИБЛИОГРАФИЯ Лантери, Ф. Лантери, Ф., Биора, Ф. и Шеперд, С. (1993), «Аспекты реализации Отчет », Проект DRIVE II V2016: PRIMAVERA, Отчет № 8. Давидссон, Ф. (1992), «Промежуточный отчет о требованиях к общественному транспорту и Информатика », DRIVE II Project V2049: PROMPT, Deliverable No.4. Мауро, В. (1991), «Управление дорожной сетью», Краткая энциклопедия дорожного движения и Транспортные системы, Pergamon Press, Оксфорд. Мауро, В. и Ди Таранто, К. (1989), «UTOPIA», CCCT ’89 AFCET Proceedings Сентябрь 1989 г., Париж. Джентиле, П. и Мауро, В. (1988), «Опыт работы с SIS, Torino’s Public Система помощи при эксплуатации транспорта », Международная конференция по автоматическим транспортным средствам. Расположение в городских транзитных системах, Оттава. де Сен-Лоран, Б. (1991), «Информационная система для общественного транспорта», Материалы конференции DRIVE, февраль 1991 г. ЕГО домашняя страница Снежно-ледовый план | WSDOTУзнайте о том, как мы подготавливаем и расставляем приоритеты в реагировании на зимние погодные условия вождения. Наши бригады приступают к работе задолго до того, как падают снежинки, чтобы дороги оставались открытыми в ненастную погоду. Мы используем расширенное прогнозирование погоды, чтобы предсказать, где будут накапливаться снег и лед, и используем эту информацию для предварительной обработки коридоров с интенсивным движением.Применяемые нами антиобледенительные химикаты помогают предотвратить прилипание льда и льда к асфальту. Как только снег начинает падать и накапливаться, мы переключаемся на предварительное смачивание соли жидким антиобледенителем с ингибитором коррозии, который помогает таять снегу и льду, облегчая его удаление с помощью снегоочистителей, но для этого нужно время. ВспашкаМного земли для покрытия Наша зимняя реакция на снег и лед — это баланс между силами природы, имеющимися бригадами и поддержанием работоспособности оборудования.
Пока мы работаем круглосуточно во время зимних штормов, мы не можем быть везде одновременно. Например, во время сильного шторма дорога может нуждаться в нескольких проходах с плугом, чтобы полностью очистить снег и лед. Это означает, что когда речь идет о вспашке, приоритет отдается дорогам. Приоритетные плуговые маршрутыДля стратегического развертывания наших ресурсов, оборудования и припасов в ненастную погоду уровни приоритета назначаются всем автомагистралям, которые мы обслуживаем. Определение основано на следующих факторах:
Знание приоритетов вспашки на вашем маршруте может помочь вам спланировать поездки, в том числе зная, что на определенных дорогах ожидаются зимние условия или, возможно, откладывается поездка во время особенно сильных штормов. Карты маршрутов Priority plowНаши карты приоритетных маршрутов плуга (PDF 1.9MB) показывают, какие дороги являются приоритетными для обработки во время сильных штормов, и могут помочь путешественникам спланировать маршруты или принять решение о поездках. Что означают цвета карты плуга?фиолетовыйНаши первоочередные маршруты, поскольку наша основная задача — держать межгосударственные коридоры открытыми. Автомагистраль между штатами 5 — самая загруженная автомагистраль на западном побережье, она жизненно важна для перемещения людей и товаров в целях поддержки экономики.С самого начала соревнования наша цель — сохранить хотя бы одну полосу движения в каждом направлении и стремиться к голому и мокрому асфальту на всех полосах движения. Синий Это важные междугородние и местные маршруты, по которым перевозится от 20 000 до 80 000 автомобилей в день. Эти участки шоссе включают многие восточно-западные маршруты, такие как участки US 2, US 12 и SR 14. ЗеленыйОбычно по этим маршрутам перевозится менее 20 000 автомобилей в день. Уровни приоритета некоторых зеленых автомагистралей меняются по мере изменения количества людей, использующих шоссе, и географического расположения, например, US 101 возле Discovery Bay. оранжевыйЗимний климат сильно различается по обе стороны от Каскадов. Вы, вероятно, заметите больше оранжевых маршрутов в Восточном Вашингтоне, таких как SR 21. Это потому, что зимой на восточной стороне Каскадов часто бывают снегопады и низкие температуры. Нашим приоритетом является поддержание движения в нормальных ожидаемых зимних условиях для 5 000–10 000 автомобилей, которые ежедневно используют эти дороги. КрасныйПо этим маршрутам ежедневно проезжает менее 5 000 автомобилей.Некоторые из этих дорог, например, верховья SR 504 на горе Сент-Хеленс, часто закрыты в зимние месяцы. Черный Мы сотрудничаем с агентствами по всему штату, чтобы управлять участками автомагистралей, которые проходят через многие города и округа. Обработка дорогМы используем вспашку и различные продукты для предварительной обработки и расчистки дорог — баланс материалов и количества используемых материалов при изменении условий. Защита от обледененияЖидкий хлорид кальция, хлорид натрия или хлорид магния наносят на голую дорогу перед штормом по адресу:
ПротивообледенительнаяТвердый хлорид натрия (соль) применяется для удаления тонкого слоя снега или льда уже на дороге. Он также может быть очень эффективным для растапливания и предотвращения прилипания гололеда и ледяного дождя к дороге Предварительное смачивание Смачивание твердого химического материала и песка хлоридом кальция или магния заставляет их лучше прилипать к поверхности дороги, помогает активировать твердую соль и снижает коррозию. В некоторых случаях трудно удерживать твердые частицы на дороге, особенно при высокоскоростном движении. В этих случаях предварительное увлажнение может помочь предотвратить разнос песка с дороги, сэкономив на использовании материала и гарантируя, что продукт находится в нужном месте. ПесокХотя песок использовался не так часто, как в прошлые годы, он все еще используется для обработки дорог, особенно в более холодную погоду. Однако песок может довольно быстро сдуть с проезжей части и вызвать проблемы с очисткой и качеством воды, если попадет в близлежащие водоемы. Ингибиторы коррозииМы добавляем ингибиторы коррозии — продукты, помогающие предотвратить коррозию — в наши продукты для обработки, чтобы уменьшить коррозию транспортных средств, движущихся по дорогам. Автомобилисты, обеспокоенные попаданием соли или химикатов на свои автомобили, также могут захотеть вымыть их, чтобы удалить любые загрязнения. Факторы окружающей среды Соль, химикаты и песок — все они потенциально опасны для окружающей среды, поэтому мы обучаем операторов наносить столько, сколько необходимо. Нам нужна ваша помощьЧто вы можете сделать, чтобы улучшить условия вождения, в том числе:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
 1. Pri1 Retry Limit
1. Pri1 Retry Limit Напротив, RL [1] не оказывает значительного влияния на надежность сообщений Pri4, как показано на рисунке 4, поскольку процент успешных передач сообщений Pri4 в основном основан на RL [4], который зафиксирован на 1.
Напротив, RL [1] не оказывает значительного влияния на надежность сообщений Pri4, как показано на рисунке 4, поскольку процент успешных передач сообщений Pri4 в основном основан на RL [4], который зафиксирован на 1. Мы также наблюдаем, что по мере увеличения количества транспортных средств N процент успешных передач уменьшается, а средняя задержка увеличивается. Это связано с тем, что по мере увеличения N интенсивность трафика в сети увеличивается, увеличивается количество коллизий, уменьшается процент успешных передач, а также увеличивается средняя задержка обоих приоритетных сообщений.
Мы также наблюдаем, что по мере увеличения количества транспортных средств N процент успешных передач уменьшается, а средняя задержка увеличивается. Это связано с тем, что по мере увеличения N интенсивность трафика в сети увеличивается, увеличивается количество коллизий, уменьшается процент успешных передач, а также увеличивается средняя задержка обоих приоритетных сообщений. Чем выше RL [4], тем ниже надежность Pri4 и больше задержка Pri4. Этот факт особенно ярко проявляется при больших значениях N. Поэтому для остальных экспериментов мы решили использовать RL [4] = 1 в качестве значения по умолчанию.
Чем выше RL [4], тем ниже надежность Pri4 и больше задержка Pri4. Этот факт особенно ярко проявляется при больших значениях N. Поэтому для остальных экспериментов мы решили использовать RL [4] = 1 в качестве значения по умолчанию. В соответствии с наблюдениями на рисунках 9 и 10 из рисунка 11 мы видим, что чем больше значения L, тем выше задержка для обоих. приоритетные сообщения. Однако мы замечаем, что средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщений по умолчанию, равное 0,1 с [19] (время жизни по умолчанию — это интервал времени, в течение которого сообщения безопасности полезны).
В соответствии с наблюдениями на рисунках 9 и 10 из рисунка 11 мы видим, что чем больше значения L, тем выше задержка для обоих. приоритетные сообщения. Однако мы замечаем, что средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщений по умолчанию, равное 0,1 с [19] (время жизни по умолчанию — это интервал времени, в течение которого сообщения безопасности полезны). Все остальные значения параметров по умолчанию показаны в таблицах 2 и 3. На рисунках 12 и 13 показан процент успешных передач для Pri1 и Pri4, соответственно, по сравнению с N для различных значений P1. На рисунке 14 показана средняя задержка для каждого приоритета в сравнении с N для различных значений P1.
Все остальные значения параметров по умолчанию показаны в таблицах 2 и 3. На рисунках 12 и 13 показан процент успешных передач для Pri1 и Pri4, соответственно, по сравнению с N для различных значений P1. На рисунке 14 показана средняя задержка для каждого приоритета в сравнении с N для различных значений P1.
 Чтобы увеличить вероятность успешной передачи сообщений с более высоким приоритетом, им назначается более высокий NR [ i ].
Чтобы увеличить вероятность успешной передачи сообщений с более высоким приоритетом, им назначается более высокий NR [ i ].
 Однако дальнейшее увеличение до NR [1] = 5 увеличивает количество сообщений в 5 раз, вызывая интенсивные коллизии и нарушая цель, тем самым снижая надежность Pri1.
Однако дальнейшее увеличение до NR [1] = 5 увеличивает количество сообщений в 5 раз, вызывая интенсивные коллизии и нарушая цель, тем самым снижая надежность Pri1. Е. Увеличивает интенсивность движения и увеличивает количество столкновений) вызывает более низкую надежность системы и более высокую среднюю задержку.
Е. Увеличивает интенсивность движения и увеличивает количество столкновений) вызывает более низкую надежность системы и более высокую среднюю задержку. В соответствии с нашими наблюдениями, сделанными на рисунках 19 и 20, мы замечаем, что более высокие значения NR [4] увеличивают среднюю задержку для обоих приоритетных сообщений.
В соответствии с нашими наблюдениями, сделанными на рисунках 19 и 20, мы замечаем, что более высокие значения NR [4] увеличивают среднюю задержку для обоих приоритетных сообщений. Обратите внимание, что для всех случаев средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщения по умолчанию.
Обратите внимание, что для всех случаев средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщения по умолчанию. Во всех случаях средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщения по умолчанию.
Во всех случаях средняя задержка все еще приемлема, то есть она меньше, чем время жизни сообщения по умолчанию. Во всех случаях средняя задержка приемлема, то есть ее значение ниже времени жизни сообщения по умолчанию.
Во всех случаях средняя задержка приемлема, то есть ее значение ниже времени жизни сообщения по умолчанию. Мы замечаем, что по мере увеличения P1 надежность Pri1 в инфраструктурных сетях остается постоянной, но снижается в специальных сетях. Эта тенденция особенно ярко выражена для больших значений N.
Мы замечаем, что по мере увеличения P1 надежность Pri1 в инфраструктурных сетях остается постоянной, но снижается в специальных сетях. Эта тенденция особенно ярко выражена для больших значений N.
 Разница в производительности между двумя сетевыми настройками более заметна для большого количества транспортных средств и высокого процента сообщений с приоритетом 1 (см. Рисунок 29). Другими словами, IVC на базе инфраструктуры обеспечит значительные преимущества в городских районах, где количество транспортных средств и потенциальная загруженность дорог высоки. Следовательно, для городских районов, где мы можем видеть значительное преимущество в производительности при использовании инфраструктурных сетей, денежные вложения в такие сети оправданы.С другой стороны, поскольку стоимость инфраструктуры на основе сети может быть очень высокой для сельских районов, в них может не быть необходимости.
Разница в производительности между двумя сетевыми настройками более заметна для большого количества транспортных средств и высокого процента сообщений с приоритетом 1 (см. Рисунок 29). Другими словами, IVC на базе инфраструктуры обеспечит значительные преимущества в городских районах, где количество транспортных средств и потенциальная загруженность дорог высоки. Следовательно, для городских районов, где мы можем видеть значительное преимущество в производительности при использовании инфраструктурных сетей, денежные вложения в такие сети оправданы.С другой стороны, поскольку стоимость инфраструктуры на основе сети может быть очень высокой для сельских районов, в них может не быть необходимости.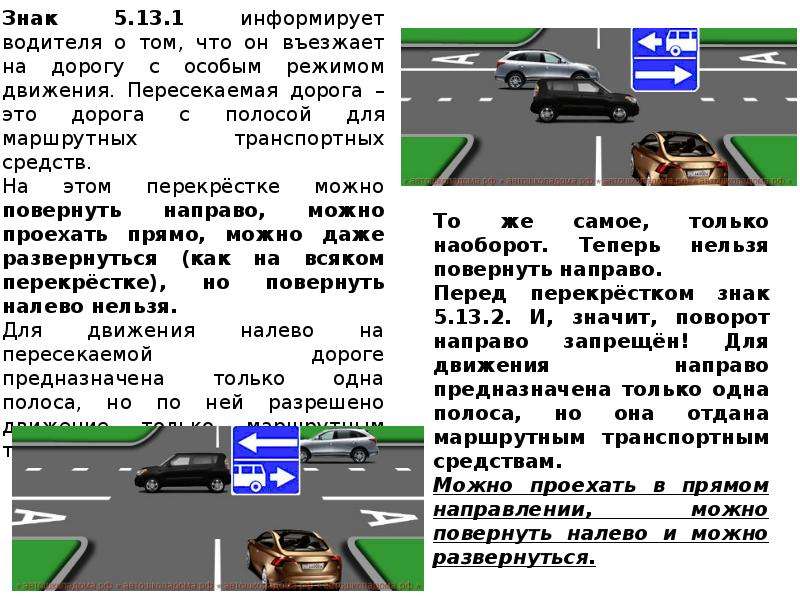 по трассе
по трассе ..
.. Франко и Ф. Биора (MIZAR Automazione SpA)
Франко и Ф. Биора (MIZAR Automazione SpA)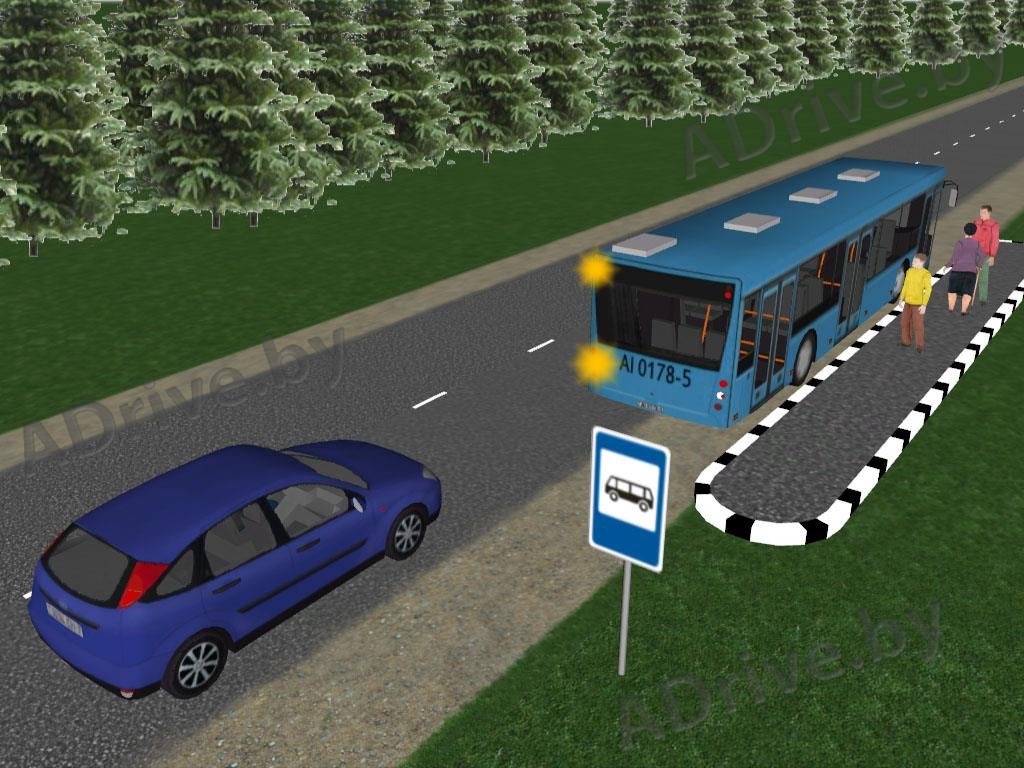 2.1 Приоритетный отзыв
2.1 Приоритетный отзыв КОНТРОЛЛЕР ТОЧЕЧНОГО ПЕРЕСЕЧЕНИЯ
КОНТРОЛЛЕР ТОЧЕЧНОГО ПЕРЕСЕЧЕНИЯ Обзор методов обнаружения / локации транспортных средств также предоставляется как уровень производительность, достижимая с этими системами, зависит от знания путевые машины. Это суть документа, поскольку в нем рассматриваются расширенные телематические системы.
Обзор методов обнаружения / локации транспортных средств также предоставляется как уровень производительность, достижимая с этими системами, зависит от знания путевые машины. Это суть документа, поскольку в нем рассматриваются расширенные телематические системы.
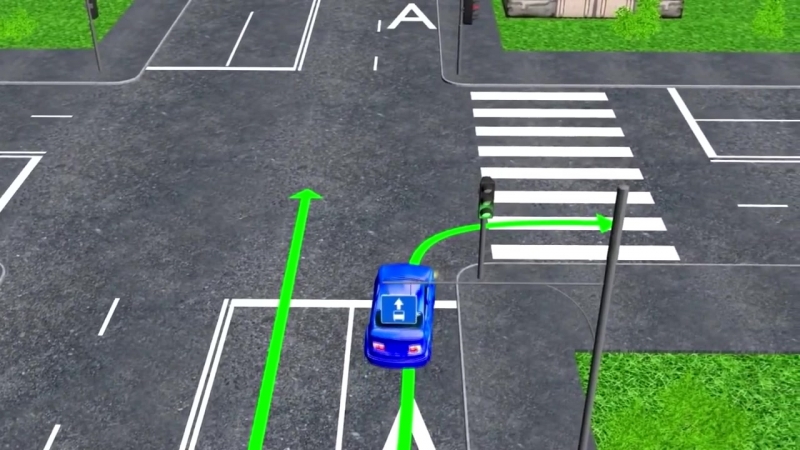

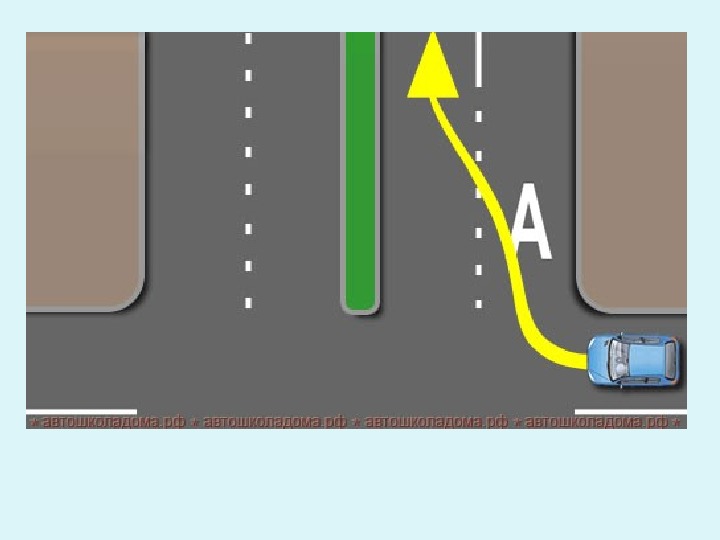 Стратегии абсолютного приоритета могут применяются к службам, работающим на зарезервированных полосах движения, но в ситуациях, когда многие службы используют одни и те же зарезервированные полосы, или там, где машины экстренной помощи или такси могут использовать полосы, зарезервированные для общественных служб, должны обрабатываться отдельно с помощью стратегий обеспечения высокого (но не абсолютного) приоритета.
Стратегии абсолютного приоритета могут применяются к службам, работающим на зарезервированных полосах движения, но в ситуациях, когда многие службы используют одни и те же зарезервированные полосы, или там, где машины экстренной помощи или такси могут использовать полосы, зарезервированные для общественных служб, должны обрабатываться отдельно с помощью стратегий обеспечения высокого (но не абсолютного) приоритета.

 д.). Обычно зарезервированные полосы используются многими службами (трамваями и автобусами).
д.). Обычно зарезервированные полосы используются многими службами (трамваями и автобусами). Общая спецификация:
Общая спецификация: полученный диспетчером перекрестка, и продолжайте движение, пока автомобиль не покинул перекресток.
полученный диспетчером перекрестка, и продолжайте движение, пока автомобиль не покинул перекресток. определяется динамически и разрешает возможные конфликты между запросами соответственно.
определяется динамически и разрешает возможные конфликты между запросами соответственно.



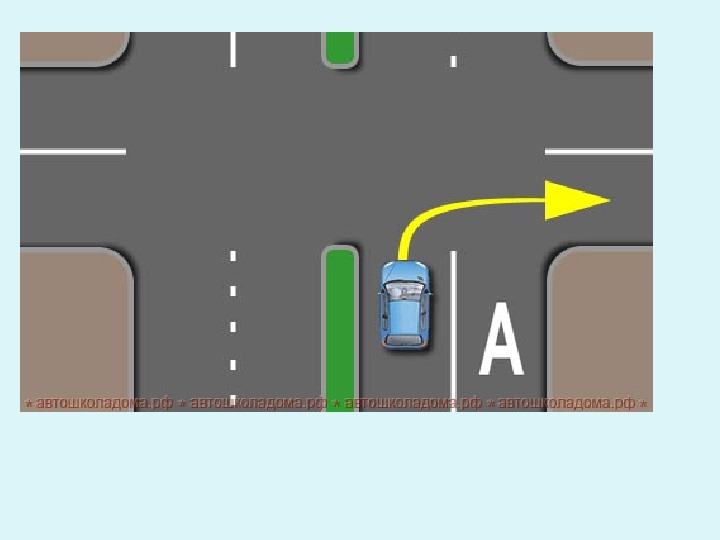
 Зарезервированная полоса PT не требуется, но информация ограничена фиксированными местоположениями.
Зарезервированная полоса PT не требуется, но информация ограничена фиксированными местоположениями. 2.1, что позволяет использование подходящих стадий, которые могут быть предусмотрены в рамках стандарта цикл.
2.1, что позволяет использование подходящих стадий, которые могут быть предусмотрены в рамках стандарта цикл.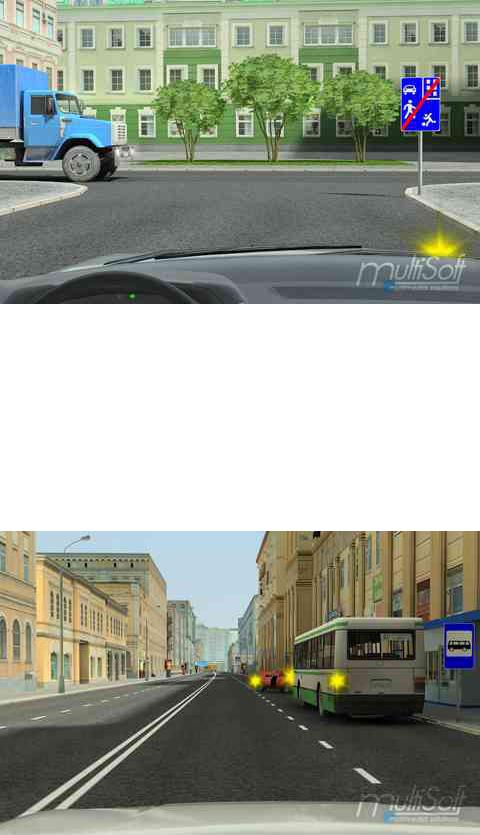 Расчет транспортного потока рассчитывается и обновляется путем обработки данных, предоставленных дорожными детекторами.
Расчет транспортного потока рассчитывается и обновляется путем обработки данных, предоставленных дорожными детекторами.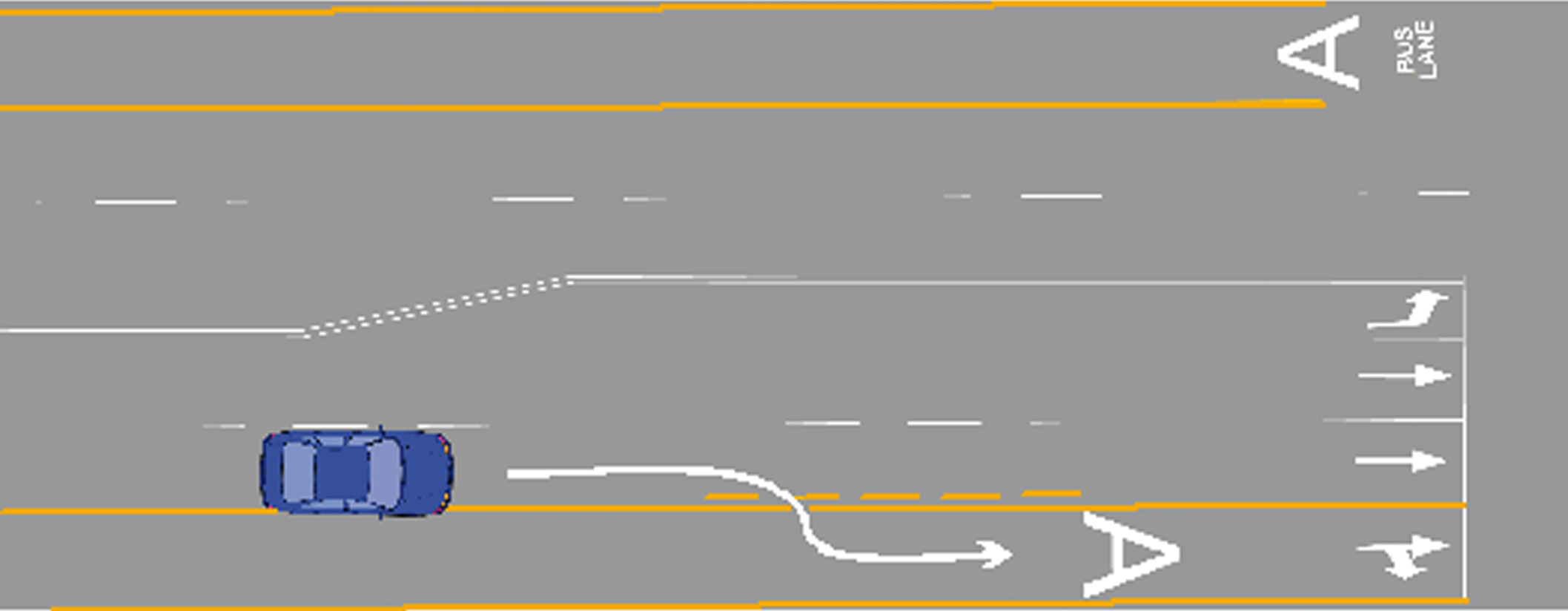 Автомобиль PT должен ждать очереди частных транспортные средства должны быть очищены, прежде чем они смогут пересечь перекресток.Этот эффект может быть учитывается системами, которые могут динамически оценивать условия движения.
Автомобиль PT должен ждать очереди частных транспортные средства должны быть очищены, прежде чем они смогут пересечь перекресток.Этот эффект может быть учитывается системами, которые могут динамически оценивать условия движения.

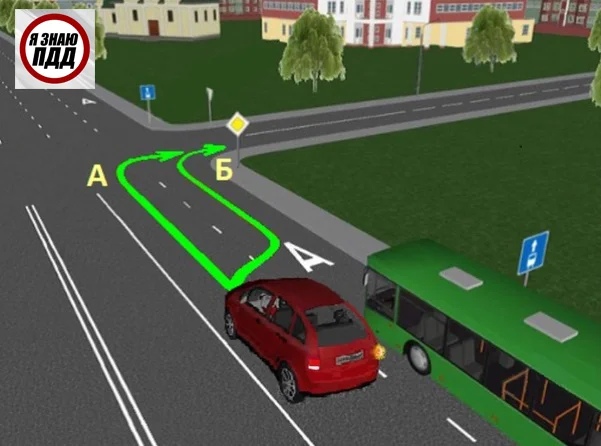

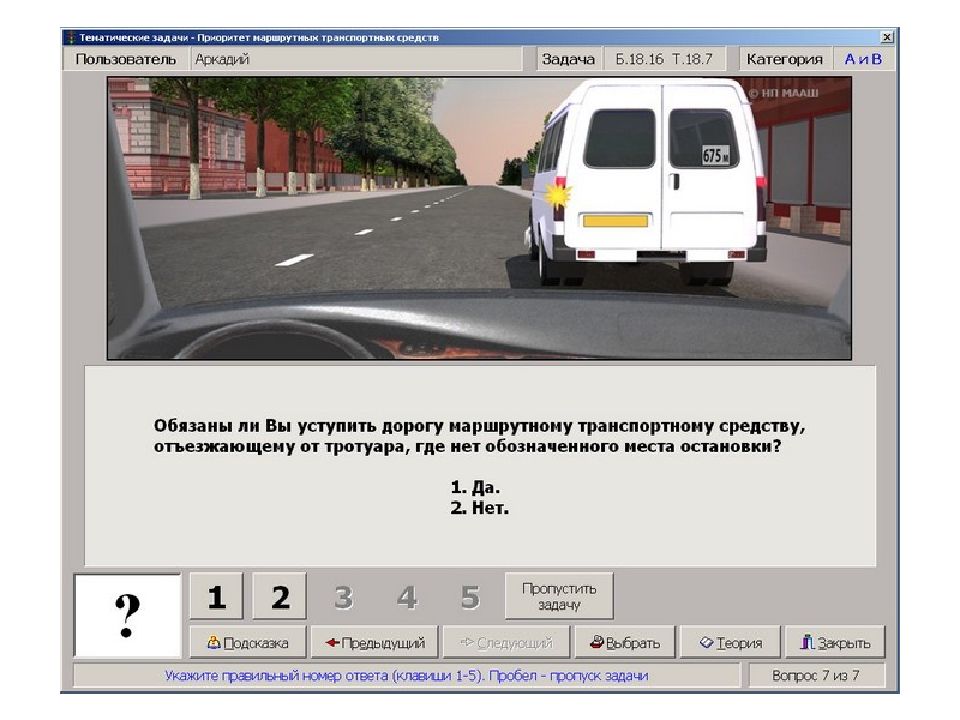






 3.1 Расположение автомобиля
3.1 Расположение автомобиля Активация двери автомобиля при автобусные остановки используются как дополнительная информация. Стандартное отклонение Погрешность определения местоположения, достигаемая этим методом, составляет <5 м.
Активация двери автомобиля при автобусные остановки используются как дополнительная информация. Стандартное отклонение Погрешность определения местоположения, достигаемая этим методом, составляет <5 м.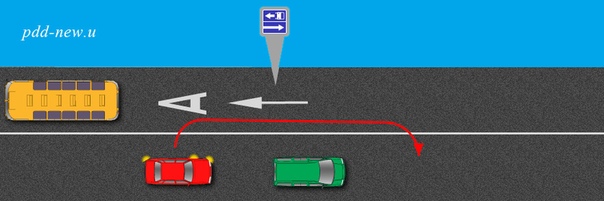 Затем прогнозы обновляются в соответствии с ход транспортных средств.Для этого используется центральная система, которая обычно производит выборку местоположения транспортного средства один раз в минуту, опрашивает транспортное средство перед перекресток каждые пятнадцать-двадцать секунд, пока автомобиль не уедет узел по последнему прогнозу.
Затем прогнозы обновляются в соответствии с ход транспортных средств.Для этого используется центральная система, которая обычно производит выборку местоположения транспортного средства один раз в минуту, опрашивает транспортное средство перед перекресток каждые пятнадцать-двадцать секунд, пока автомобиль не уедет узел по последнему прогнозу.


 Разные веса разрешены для разных ссылок и для разных услуг PT (для предоставления абсолютный и более низкий приоритет).
Разные веса разрешены для разных ссылок и для разных услуг PT (для предоставления абсолютный и более низкий приоритет). Кривые становится резче по мере приближения транспортных средств к перекресткам и прогнозирования отклонения уменьшаются. Вес отдельного автомобиля зависит от уровня запрошенный приоритет. Вес может принимать значения в пределах подходящего определенного диапазона. на основе анализа чувствительности функции (1).
Кривые становится резче по мере приближения транспортных средств к перекресткам и прогнозирования отклонения уменьшаются. Вес отдельного автомобиля зависит от уровня запрошенный приоритет. Вес может принимать значения в пределах подходящего определенного диапазона. на основе анализа чувствительности функции (1).
 (1992), «Особенности приоритетных систем общественного транспорта», DRIVE II. Проект В2016: ПРИМАВЕРА, Отчет № 2.
(1992), «Особенности приоритетных систем общественного транспорта», DRIVE II. Проект В2016: ПРИМАВЕРА, Отчет № 2.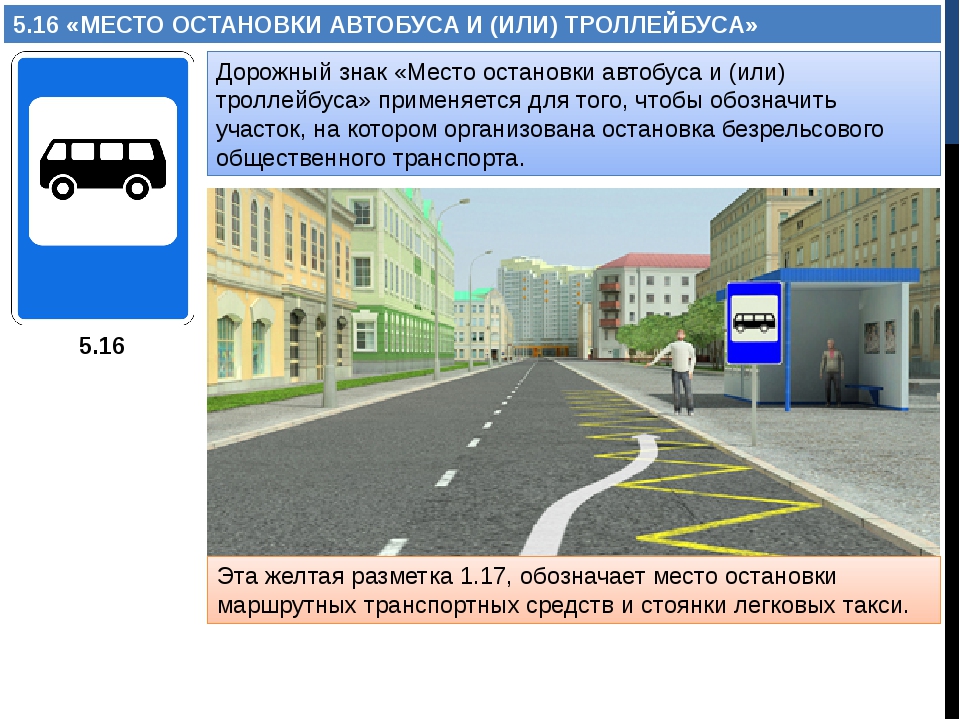





 Наше прецизионное оборудование также регулярно калибруется, чтобы гарантировать, что мы применяем лечение в тщательно отмеренных дозах. Мы также ежегодно контролируем более 50 участков на предмет содержания хлоридов в почве и воде вблизи наших дорог.
Наше прецизионное оборудование также регулярно калибруется, чтобы гарантировать, что мы применяем лечение в тщательно отмеренных дозах. Мы также ежегодно контролируем более 50 участков на предмет содержания хлоридов в почве и воде вблизи наших дорог.